Vers.
3.0
Sistema PICK
PickSun
Inseguitore solare
Guida all’installazione, all’uso e alla
manutenzione
DPM Elettronica Foggia
www.dpmelettronica.it
Indice
1
Inseguitore solare .................................................................................................. 4
1.1
1.2
1.3
2
Introduzione ................................................................................................................................ 4
Descrizione sistema di puntamento ......................................................................................... 5
Caratteristiche tecniche .............................................................................................................. 6
I dispositivi ............................................................................................................ 7
2.1
2.2
2.3
2.4
2.5
Principio di funzionamento ...................................................................................................... 7
Il sensore di massima luminosità ............................................................................................. 7
Scheda elettronica di controllo rotori ....................................................................................... 8
Led di segnalazione .................................................................................................................. 10
Pulsanti di comando ................................................................................................................. 11
Accessori ....................................................................................................................... 12
2.6
2.7
2.8
2.9
2.10
2.11
3
Installazione sensore e scheda elettronica ..................................................... 15
3.1
3.2
3.3
3.4
3.5
4
Alimentatore 180-260 volt ....................................................................................................... 12
Sensore di vento ........................................................................................................................ 12
Sensore di temperatura ............................................................................................................ 13
Modulo 8 ingressi 4 relè ........................................................................................................... 13
Interfaccia Usb-RS485 .......................................................................................................... 13
Programma PickMaster....................................................................................................... 14
Montaggio del sensore ............................................................................................................. 15
Montaggio della scheda ........................................................................................................... 15
Montaggio dell’alimentatore ................................................................................................... 16
Montaggio del sensore di vento ............................................................................................. 16
Montaggio del sensore di temperatura .................................................................................. 16
Collegamenti ........................................................................................................ 17
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.10
4.11
4.12
4.13
4.14
4.15
Cavo sensore ............................................................................................................................. 17
Cavo allarme di guardia CP .................................................................................................... 18
Ingresso allarme TP .................................................................................................................. 18
Connettore di massa libero ...................................................................................................... 18
Cavo Fine corsa ......................................................................................................................... 18
Cavo sensore vento................................................................................................................... 19
Cavo sensore di temperatura .................................................................................................. 19
Cavo bus RS485 ......................................................................................................................... 19
Cavo uscita NOTTE stand by inverter (warning) ................................................................ 20
Cavo uscita allarme ............................................................................................................. 20
Relè Nord .............................................................................................................................. 20
Relè Sud................................................................................................................................. 20
Relè Est .................................................................................................................................. 21
Relè Ovest ............................................................................................................................. 21
Collegamenti Motore ........................................................................................................... 22
5
Verifiche collegamenti ....................................................................................... 24
6
Messa in funzione ............................................................................................... 25
2/38
6.1
6.2
6.3
7
Autocalibrazione....................................................................................................................... 25
Avvio modalità automatica ..................................................................................................... 25
Regolazioni ................................................................................................................................ 26
Il programma PickMaster e il bus ................................................................... 27
7.1 Lettura videata di stato ............................................................................................................ 28
7.2 Videata di configurazione ....................................................................................................... 30
7.2.1
Programmazione tempi ...................................................................................................... 30
7.2.2
Programmazione soglie ...................................................................................................... 31
7.2.3
Destinazione allarmi: indirizzo e famiglia ......................................................................... 31
7.2.4
Fattori di scala ................................................................................................................... 31
7.2.5
Soglie allarmi ..................................................................................................................... 32
7.3 Configurazione Avanzate ........................................................................................................ 33
7.3.1
Abilitazioni ........................................................................................................................ 33
7.3.2
Imposta alta e bassa sensibilità .......................................................................................... 34
7.3.3
Modifica indirizzo .............................................................................................................. 34
7.3.4
EEprom .............................................................................................................................. 34
8
Aggiornamento del firmware ........................................................................... 35
8.1
Utilizzo del tool PickLoader .................................................................................................... 35
3/38
1 Inseguitore solare
1.1 Introduzione
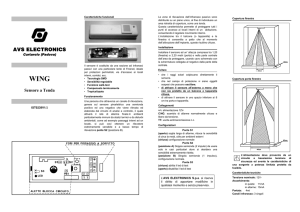
Il sole irradia la sua energia verso la Terra seguendo la sua traiettoria nel cielo.
La posizione esatta dipende dall’ora del giorno nel moto da est ad ovest (0° 180°), dal mese dell’anno per quanto riguarda il mo to sud - nord (30° - 60°).
I due gradi di libertà rimangono separati solo se si utilizza un asse di rotazione
giornaliera parallelo all’asse terrestre: in questo caso infatti durante il giorno
lavora un solo motore e durante l’anno interviene il secondo.
Al contrario per inseguitori ad asse verticale il sole deve essere cercato
mediante la rotazione simultanea di entrambi i motori.
La scheda ed il sensore di luminosità dell’inseguitore solare permette di tenere
conto di entrambi i tipi di rotore ed in più, nel caso la luce del sole è schermata
da una nuvola, il sistema cerca materialmente nel cielo il punto di massima
luminosità.
Lo stesso dispositivo è adatto al funzionamento come puntatore solare, in
questo caso il sole viene proiettato con un specchio mobile costantemente per
tutta la giornata, su una stessa superficie.
La funzione di puntatore solare è estremamente utile per dotare di illuminazione
e riscaldamento naturale luoghi interrati o comunque privi di finestre nella
direzione del sole.
La scheda ed il sensore di luminosità dell’inseguitore solare permette di tenere
conto di entrambi i tipi di rotore ed in più, nel caso la luce del sole è schermata
da una nuvola, il sistema cerca materialmente nel cielo il punto di massima
luminosità.
Figura 1 Differenze impianto fisso-orientabile
4/38
Figura 2 Vela fotovoltaica ad inseguimento biassiale
1.2
Descrizione sistema di puntamento
Il dispositivo si colloca nella fascia professionale sia per il tipo di sensore di
luminosità, concettualmente innovativo, sia per la scheda di gestione a
microprocessore che integra alla precisione la sicurezza e la gestione a
distanza.
Sicurezza contro il furto, il sabotaggio ed anche contro il vento forte e la
grandine. Gestione a distanza tramite doppino RS485 in parallelo alle linee
elettriche di interi parchi fotovoltaici, con puntamento indipendente dei pannelli
e con il controllo e l’ottimizzazione dell’intero impianto.
5/38
1.3 Caratteristiche tecniche
Caratteristiche tecniche
Alimentazione
12 Vcc / 170-220 volt ac/dc
Assorbimento
Max 40 mA 0.5W con i motori
in moto
Numero massimo di schede sul bus
4096
Bus di collegamento
RS485 su doppino twistato
Max distanza tra gli inseguitori
2 Km
Sensore di temperatura
SI : -63 … +120°C
Sensore di vento
SI: allarme velocità vento
Misuratore di tensione del pannello
SI:
allarme
mancanza
di
tensione
Comandi Manuali
SI: da PC o localmente
Tipologia di sensore per inseguitore solare
Modello DPM Elettronica
Omnidirezionale con guadagno
automatico
con
puntatore
ottico incorporato
Tipologia di sensore per puntatore solare
4 fotoresistenze
Compensazione fotoresistenza
Si,
fattore
di
scala
programmabile per EO e NS e
autoprogrammabile
Allarme furto e sabotaggio
SI, con telegestione
Allarme reset modulo
SI, con telegestione
Allarme alimentazione bassa
SI, con telegestione
Movimentazioni manuali a distanza
SI, con telegestione
6/38
2
I dispositivi
2.1 Principio di funzionamento
Due fotoresistenze collegate in serie a due resistenze fisse realizzano due
partitori resistivi. La tensione in uscita dai partitori viene confrontata e la
maggiore indica la fotoresistenza che prende più luce.
Il rotore orienterà la vela proprio nella direzione di questa fotoresistenza.
Il problema maggiore è di tipo ottico, bisogna fare in modo che la fotoresistenza
capti il sole per oltre 180° e che la fotoresistenz a si illumini linearmente di più
mano a mano che l’inclinazione si avvicini ai 90°.
In caso contrario, se vi sono flessi nella curva di trasferimento potrebbe
accadere che il sensore trovi altri punti di equilibrio, rari poiché in equilibrio
devono stare 4 fotoresistenze ma potenzialmente dannose per la produttività
dell’impianto e per l’immagine del prodotto.
2.2 Il sensore di massima luminosità
L’idea di base nella costruzione del sensore è quella di utilizzare le proprietà
ottiche dei prismi. La luce incidente sul prisma viene in parte riflessa ed in parte
rifratta in modo dipendente dall’angolo di incidenza.
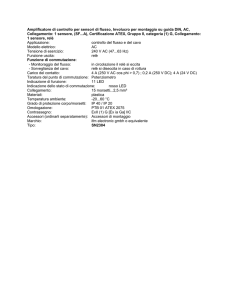
Il sensore è costituito da 4 fotoresistenze ancorate sotto 4 prismi di materiale
trasparente in grado di assumere luce da un arco di 90° di cielo.
Ciascun elemento lavora insieme al suo antagonista appaiato, per esempio est
con ovest, il settore di cielo più
illuminato produrrà maggiori effetti
sulla fotoresistenza rispetto al
settore meno illuminato. Un cilindro
ombreggiante centrale permette di
creare una soglia netta e quindi una
maggiore precisione all’allineamento
col sole. Il sensore realizzato in un
monoblocco di resina bicomponente
è un dispositivo particolarmente
robusto e destinato a durare nel
tempo.
Figura 3 Foto del
massima luminosità
7/38
sensore
di
2.3 Scheda elettronica di controllo rotori
Figura 4 Foto centralina inseguitore
La scheda elettronica, governata da un microcontrollore Motorola, presenta al
suo interno tutto ciò che serve per il controllo del rotore, alcuni accessori esterni
espandono le funzionalità della scheda.
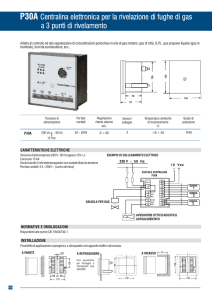
Convenzionalmente sono state adottati dei termini per rappresentare gli
spostamenti del rotore, considerando che è necessario rivolgerlo verso SUD il
sud è detta la direzione per andare più perpendicolare alla terra, Nord quella
per andare parallela alla terra.
Dalla linea Nord-sud guardando il Sud la direzione Est è quella di sinistra,
quella ovest quella di destra.
Naturalmente quanto detto è una convenzione, siccome la rotazione massima
della vela ad asse verticale d’estate è maggiore di 180° , ci si trova verso il fine
corsa del tramonto che per ruotare ad est, il rotore inizialmente si muove verso
Ovest.
8/38
Figura 5 Convenzione direzioni
La convenzione si è resa necessaria per poter dare riferimenti concreti alle
segnalazioni, ai comandi ed ai connettori della scheda.
9/38
2.4 Led di segnalazione
Figura 6 Scheda inseguitore
Led Power: il led lampeggia segnalando il funzionamento della scheda
Led Manuale: quando acceso indica che il rotore non si muove
spontaneamente ma solo grazie a comandi manuali
Led Nord, Sud, Est, Ovest (West): questi led hanno una doppia funzione, la
prima indica in maniera più sensibile dei rotori, la direzione di maggiore
luminosità: se è acceso l’est anziché l’ovest significa che la luminosità ad est è
maggiore di quella ad ovest.
La seconda funzione, indicata con il lampeggio del led, indica che il rotore ha
raggiunto il relativo fine corsa.
Led Centro: indica quando acceso che la direzione con i due led spenti è
esattamente in equilibrio.
Led Notte: indica che la relativa uscita di Notte è attiva, cioè quando i motori
potrebbero avere necessità di muoversi.
10/38
Led Allarm: indica che la relativa uscita di allarme è attiva, cioè almeno un
allarme è in esecuzione.
Led GainNS: opzionale. Indica quando acceso che la sensibilità delle
fotoresistenze è bassa, è la naturale condizione operativa. Quando il led è
spento significa che la scheda lavora in alta sensibilità e questo va bene per
particolari tipi di trasduttori o per dimostrativi posti in locali interni.
Led GainEO: come sopra per le direzioni est-ovest
Led Nord, Sud, Est, Ovest (West) sui relè: indica che il relè relativo è attivo.
2.5 Pulsanti di comando
Figura 7 Tasti di comando
Pulsante Nord, Sud,
Est,
Ovest
(West):
impostano il dispositivo in
modalità manuale ed
attivano i motori nella
direzione
selezionata.
Una volta premuti questi
tasti
è
necessario
riportare il dispositivo in
modalità automatica, in
caso contrario rimarrebbe
fermo per sempre nella
direzione in cui è stato
lasciato.
Pulsante
Auto: una
rapida pressione riporta il dispositivo in funzionalità automatica, cioè il rotore
insegue il sole. Una pressione prolungata di 10 secondi permette di effettuare
l’operazione iniziale di autocalibrazione.
11/38
Accessori
Il dispositivo può essere attrezzato con una serie di accessori per permettere
una espansione delle funzionalità.
2.6 Alimentatore 180-260 volt
Se non abbiamo una alimentazione a 12 volt, possiamo collegare un
alimentatore e sfruttare per l’alimentazione della scheda la tensione di rete.
Figura 8 Un tipo di alimentatore
2.7 Sensore di vento
Permette di misurare la velocità del vento e quindi di mettere il pannello
orizzontale in caso di vento forte, proteggendo quindi la struttura da possibili
rotture.
Figura 9 Sensore di vento
12/38
2.8 Sensore di temperatura
Viene utilizzato per monitorare la temperatura di un pannello e se questa
supera la soglia impostata, per esempio 70 °C, vien e
attivato l’allarme incendio.
Può essere anche usato per studiare la produttività
dell’impianto in funzione della temperatura.
Figura 10 Sensore di temperatura
2.9 Modulo 8 ingressi 4 relè
Permette di remotizzare un allarme e tramite pulsanti di dare comandi ai rotori.
Per esempio è possibile con la pressione di un solo tasto mettere tutti i moduli
in posizione verticale durante
una grandinata oppure con
un altro tasto ruotare tutte le
vele in posizione orizzontale
durante
una
velocità
eccessiva del vento nel caso
non sia presente il sensore di
velocità del vento che esegue
automaticamente
questa
operazione.
Figura 11 Modulo 4 relè
2.10 Interfaccia Usb-RS485
Permette di interfacciare ad un PC una rete di
inseguitori anche con cavi lunghi 1-2 Km. Gli
inseguitori vengono collegati tutti in parallelo su tre
fili X, Y, GND e quindi all’interfaccia. Dall’altro lato
sull’interfaccia si connette un cavetto USB per
andare ad un PC dotato del programma PickMaster.
Figura 12 Interfaccia USB
13/38
2.11 Programma PickMaster
Permette di visualizzare lo stato degli inseguitori, gli allarmi, di posizionare i
rotori nella posizione desiderata, permette la connessione remota dell’impianto.
Figura 13 Videata primcipale PickMaster
14/38
3 Installazione sensore e scheda elettronica
Posizionare il rotore quasi a fine corsa verso nord cioè quasi orizzontale e a
metà tra est e ovest per agevolare le operazioni di montaggio.
3.1 Montaggio del sensore
Il sensore è provvisto di una staffa di fissaggio. Scegliere la posizione in modo
tale che sia sempre a livello superiore
rispetto a quello del piano dei pannelli. In
questo modo non può mai avvenire
l’ombreggiamento del sensore. Ruotare il
sensore in modo da avere il Nord
orientato verso la parte più alta della vela.
Conviene scegliere la posizione non
facilmente raggiungibile, se qualche
causa esterna al sole oscura i vetrini del
sensore il rotore posiziona la vela in modo
errato. Se in qualche modo una delle lenti
del sensore si dovesse sporcare in modo
disuguale alle altre tre è necessaria la
pulizia per ripristinare il corretto
funzionamento.
Figura 14 Sensore installato
3.2 Montaggio della scheda
La scheda va installata su una guida Din
in un quadro stagno in una posizione
protetta,
all’ombra
e
facilmente
raggiungibile per le operazioni di
manutenzione. Gli ingombri sono 14.5
cm x 13 cm di altezza x 3.5 cm di
spessore.
Infatti è proprio accedendo alla scheda
che possiamo fare effettuare al rotore
degli spostamenti manuali. Con l’utilizzo
del computer l’accesso alla scheda diventa molto meno importante.
Figura 15 Installazione su barra din
15/38
3.3 Montaggio dell’alimentatore
L’alimentatore occupa un modulo din e va installato affianco alla centralina sulla
stessa barra. Le sue dimensioni sono: 1.8 cm x 9.5 cm x 5.5 cm.
3.4 Montaggio del sensore di vento
Il sensore va installato nella parte più alta della vela su un piano superiore a
quello della vela. Il sensore deve essere collegato tramite un cavo a tre
conduttori alla scheda elettronica. Se si monta il sensore di vento più in basso è
possibile regolare la soglia di allarme ad un livello inferiore per compensare la
minore velocità del vento rilevata.
3.5 Montaggio del sensore di temperatura
Il sensore va fissato con una fascetta sulla parte posteriore di un pannello
centrale della vela. Il sensore di temperatura va collegato con un cavo a tre fili
alla scheda elettronica.
Figura 16 Installazione sensore di temperatura
16/38
4 Collegamenti
I collegamenti vengono descritti a partire dalla morsettiera inferiore da sinistra
a destra
Figura 17 Collegamenti alla centralina
4.1 Cavo sensore
Utilizzare un cavo schermato 6x0.5mm con una sezione da 7 a 10 mm della
lunghezza idonea per andare dal sensore alla centralina.
Dal lato sensore si potranno usare dei connettori fastom femmina oppure si
potranno saldare i fili.
Dal lato centralina il collegamento dovrà essere effettuato ai morsetti estraibili 5
poli dedicati ai sensori (uno dei sei conduttori non viene utilizzato).
• +5V
• Ovest (West)
17/38
•
•
•
Est
Nord
Sud
4.2 Cavo allarme di guardia CP
Cavetto di antifurto funzionante 24 ore al giorno, anche nelle ore notturne.
Facendo passare attraverso i fori di fissaggio non utilizzati di tutti i pannelli
questo cavetto monopolare proteggiamo dal distacco ogni singolo modulo.
Partire con il cavo dal morsetto CP con in serie una resistenza da 10K ohm
quindi inserire un’altra resistenza da 10 Kohm in un punto qualsiasi del cavo ed
infine inserire una resistenza da 22 Kohm all’altro capo del cavo prima della
connessione alla 12 volt.
• Comune 12 V cavo allarme
• Ritorno cavo allarme CP
4.3 Ingresso allarme TP
Come sopra, serve per una seconda linea di guardia o per un microinterruttore
sullo sportello del quadretto elettrico. Il comune è il comune dell’allarme CP.
Viene registrato un allarme differenziato per darne la possibilità di gestione.
• +Vp Ritorno cavo allarme pannello
4.4 Connettore di massa libero
•
GND
4.5 Cavo Fine corsa
Cavo da 0,22 mm da 1+4 poli da collegare agli switch normalmente chiusi dei
finecorsa. Collaudare il corretto funzionamento dei fine corsa poiché se il
funzionamento è ambiguo si possono creare danni alla struttura.
• GND
• Fine corsa Ovest
• Fine corsa Est
• Fine corsa Sud
• Fine corsa Nord
18/38
4.6 Cavo sensore vento
Cavo da 0,22 mm da 2 poli da collegare al sensore vento, cavo marrone
morsetto SV, cavo blu morsetto GND. Se si invertono i fili non accade nulla.
• Sensore Vento
• GND
4.7 Cavo sensore di temperatura
Cavo da 0,22 mm da 2 poli da collegare al sensore di temperatura.
• Temp
• GND.
4.8 Cavo bus RS485
Doppino intrecciato per il collegamento di X e Y con lunghezza fino a 2Km e
cavo rosso-nero da 1 mm per alimentazione remota.
Cavo rosso-nero da 0,5 mm da collegare ad un alimentatore 12V 1 Ampere
locale.
• +12V
• Gnd
• Bus Y
• Bus X
Figura 18 Collegamento uscita allarme
19/38
4.9 Cavo uscita NOTTE stand by inverter (warning)
Se si usa un inverter per pilotare i motori, per esempio trifase partendo da una
alimentazione monofase è utile per spegnerlo durante la notte.
Va collegato allo stand by dell’inverter motori per spegnerlo durante la notte.
L’uscita è open collector, cioè fornisce una massa a stand by attivo, durante la
notte. Durante il giorno sul morsetto si trova un pull up a 12 volt attraverso un
diodo led. Un relè va collegato come nella figura precedente.
• Warn
4.10 Cavo uscita allarme
Open collector a cui collegare tutti insieme le uscite di allarme alla bobina di un
relè con l’altro contatto alla 12 volt. Lo scambio libero del relè può essere usato
per sirene,combinatori ecc. Vedi figura per il collegamento.
• ALL
4.11 Relè Nord
Si attiva per accendere il motore dell’inclinazione nel verso di portare i pannelli
in orizzontale. Tutti i relè hanno contatti da 16 Ampere 250 volt AC.
Sono disponibili le seguenti connessioni:
• NC in collegamento al comune a motore spento
• C
comune
• NA in collegamento al comune a motore acceso
4.12 Relè Sud
Si attiva per accendere il motore dell’inclinazione nel verso di portare i pannelli
in verticale. Tutti i relè hanno contatti da 16 Ampere 250 volt AC.
Sono disponibili le seguenti connessioni:
• NC in collegamento al comune a motore spento
• C
comune
• NA in collegamento al comune a motore acceso
20/38
4.13 Relè Est
Si attiva per accendere il motore dell’azimut nel verso di portare i pannelli in
direzione Est. Tutti i relè hanno contatti da 16 Ampere 250 volt AC.
Sono disponibili le seguenti connessioni:
• NC in collegamento al comune a motore spento
• C
comune
• NA in collegamento al comune a motore acceso
4.14 Relè Ovest
Si attiva per accendere il motore dell’azimut nel verso di portare i pannelli in
direzione Ovest. Tutti i relè hanno contatti da 16 Ampere 250 volt AC.
Sono disponibili le seguenti connessioni:
• NC in collegamento al comune a motore spento
• C
comune
• NA in collegamento al comune a motore acceso
21/38
4.15 Collegamenti Motore
Per i collegamenti del motore utilizzare gli schemi seguenti
Motore CC schema elettrico
Motori corrente continua schema elettrico di collegamento
Motore 220V
Per i motori 220V alternata fornire alternativamente la fase alle due direzioni di
marcia di ciascun motore
22/38
Motori 220 volt schema elettrico di collegamento
Motore 380V
Per i motori a 380 V utilizzare 2 teleruttori trifase per ciascun motore. Uno con i
collegamenti r ed s invertiti. Ciascun relè della scheda comanderà il relativo
teleruttore.
23/38
5 Verifiche collegamenti
Prima di mettere il dispositivo in modalità automatica procedere con le seguenti
verifiche. La procedura va fatta di giorno.
Prova
Collegare il PC con il programma PickMaster alla scheda
Verificare il corretto collegamento del sensore verificando le rispettive
luminosità delle 4 direzioni ed ombreggiando una direzione alla volta.
L’ombreggiamento provoca una repentina riduzione della luminosità. Se
ombreggiate il nord e per esempio si riduce la luminosità dell’est bisogna
scollegare dalla scheda il filo dal morsetto EST e collegarlo al morsetto NORD.
Verificare il corretto collegamento dei finecorsa. Premendo manualmente le
aste dei finecorsa (con una calamita per quelli magnetici), si devono dipingere
di giallo i rispettivi quadretti nella videata del programma.
Se il quadretto rimane giallo sempre significa che il contatto normalmente
chiuso del finecorsa è interrotto da qualche parte. Se non diventa mai giallo
significa che è ponticellato. Se diventa giallo agendo su un altro finecorsa
invertire il filo analogamente alla verifica dei sensori.
Verificare il corretto collegamento dei motori. Prima di effettuare questa
operazione dobbiamo verificare di avere un po di corsa disponibile in tutte e 4 le
direzioni. Quindi premendo e rilasciando il tasto SUD il rotore dovrebbe
cominciare a porre la vela in una posizione più verticale.
Se accade il contrario invertire i collegamenti tra relè Nord e Sud.
Procedere quind alla verifica della rotazione Est-Ovest. Premere il pulsante Est
e verificare se il senso di rotazione è corretto. La direzione EST è quella
indicata sul sensore. Se la direzione è opposta, invertire il collegamento sui due
relè.
Verificare ora operativamente e con cautela che i finecorsa blocchino i motori
raggiungendoli manualmente con i tasti. Se un finecorsa non blocca il motore
significa che non è stata effettuata correttamente una delle verifiche precedenti,
tornare indietro con il motore e verificare i finecorsa.
Verifica del collegamento del sensore di temperatura. Se a video compare una
temperatura presumibilmente corretta del pannello significa che il sensore è
stato collegato correttamente. Se compare 192 o – il sensore non è
correttamente collegato.
Verifica del collegamento del sensore vento: se non c’è vento fare ruotare il
mulinello manualmente, a video la velocità del vento diventa diversa da zero se
il sensore è correttamente collegato.
Verifica collegamento allarme antifurto: nella videata principale la casella
Tens.Antifurto deve contenere un numero maggiore di 0 e minore di 4 volt. Se
la tensione indicata è zero, significa che il cavo di guardia è scollegato
lasciando il circuito aperto.
Verifica collegamento allarme sportello: Se la tensione indicata sulla videata
principale è zero significa che lo sportello o il secondo cavo di guardia è aperto.
24/38
Esito
6 Messa in funzione
6.1 Autocalibrazione.
Questa operazione permette di compensare le differenze costruttive esistenti
tra le 4 fotoresistenze del sensore.
Può essere fatta manualmente andando ad inserire gli opportuni parametri
correttivi oppure automaticamente.
Per effettuare questa operazione è necessario poter vedere lo stilo di
puntamento del sensore, se non è possibile posizionare uno stilo di puntamento
ausiliario in una posizione più comoda della vela.
Lo stilo di puntamento è un’astina di 14 cm perpendicolare alla vela, la cui
ombra indica l’errore di puntamento.
Posizionare il sensore da solo o con tutta la vela esattamente perpendicolare al
sole, l’astina di puntamento non deve dare nessuna ombra.
Tenere premuto il tasto Automatico sulla scheda per 10 secondi. Un gioco di led
indica l’inizio dell’operazione di calibrazione.
Verificare sul video del computer la corrispondenza delle misurazioni delle 4
fotoresistenze a coppie nord-sud e est-ovest.
6.2 Avvio modalità automatica
25/38
Attenzione. Prima di effettuare questa operazione verificare di aver tolto tutti gli
attrezzi dalle parti in movimento della vela, quindi togliere eventuali scale o
ponteggi dal raggio d’azione della vela.
Premere il tasto Manuale sulla scheda per passare alla modalità automatica. Un
breve segnale acustico indica il cambio di condizione e la vela potrà cominciare
a muoversi autonomamente.
6.3 Regolazioni
Tutte le regolazioni sono state effettuate di default sul dispositivo in fabbrica,
comunque qualunque modifica può essere fatta grazie al programma
PickMaster.
26/38
7 Il programma PickMaster e il bus
.
Per la comunicazione sul bus è stato adottato il protocollo di comunicazione
dello standard Pick della DPM Elettronica S.r.l. di Foggia.
.
Tramite il programma PickMaster è possibile gestire a distanza un intero parco
di inseguitori solari. In caso di allarmi il programma mette in evidenza il
problema, la causa scatenante ed i rotori coinvolti.
In caso di violente grandinate è possibile con un solo comando mettere verticali
migliaia di pannelli con una sola operazione. Nella foto possiamo osservare la
videata di controllo.
Dalla videata generale è possibile cliccare sul singolo inseguitore ed ottenere la
videata specifica.
27/38
L’indirizzo e la famiglia indicano il preciso rotore su cui agire.
Attraverso il bus è possibile agire sul puntamento dell’inseguitore solare singolo
manualmente, a partire dal primo comando vengono disattivati tutti gli
automatismi legati ai sensori.
Per riprendere il puntamento automatico premere il tasto AUTOMATICO
sull’interfaccia dedicata nel programma PickMaster
7.1 Lettura videata di stato
La videata di stato riassume i parametri operativi di uso più frequente.
L’indirizzo e la famiglia caratterizzano il modulo, nel senso che siccome tutti i
moduli sono collegati allo stesso modo questi due parametri servono alla
corretta identificazione.
La descrizione del modulo è utile poiché al passaggio del mouse sopra l’icona
comparirà proprio questa descrizione.
Il riquadro coi 4 punti cardinali ha molteplici funzioni operative e di verifica.
Premendo sui pulsanti con i punti cardinale si attiva il relativo motore e la
centralina va in modalità manuale. Se il colore del quadrato accanto è rosso
28/38
significa che il motore è acceso, se è giallo significa che è attivo il relativo fine
corsa.
Il numero che compare sopra i punti cardinali esprime la quantità di luce rilevata
dal sensore. Il range va da 0 a 255. A volte la compensazione supera il valore
di 255, in questo caso la luminosità si ferma al valore massimo.
Pulsante Automatico: premendolo il rotore torna in modalità automatica
Temperatura: è la temperatura rilevata dal relativo sensore, il range va da -63
a 120 °C, il valore 192 se appare indica che il sen sore è scollegato o guasto.
E’ possibile impostare e poi abilitare l’allarme di sovratemperatura che si
comporta come monitoraggio antincendio.
Velocità del vento: esprime in Km/h la velocità del vento rilevata dal sensore.
E’ possibile impostare una soglia di attenzione e poi una soglia di allarme per
velocità eccessive del vento. Quindi abilitare l’allarme.
Tensione pannelli: esprime la tensione erogata dai pannelli, o almeno quella
della stringa a cui è collegato la centralina. Questa tensione dipende dalla
resistenza utilizzata per il collegamento. Sotto un certo valore programmato, se
il sensore rivela ancora luce, scatta l’allarme Calo Tensione.
Tensione antifurto: esprime la tensione rilevata dalla linea del cavo di guardia.
Sotto un certo valore programmato scatta l’allarme cavo.
Tensione batteria: esprime in volt la tensione di alimentazione della scheda,
prossima a 12 volt. Se questa tensione è sotto la tensione programmata scatta
l’allarme batteria Low.
I flag di stato indicano le condizioni operative della centralina.
• Manuale: verde indica che il funzionamento è manuale, rosso
automatico
• Stand By: rosso indica che la scheda invia all’inverter il comando di
spegnersi
• Luce scarsa: indica che non è più conveniente per il rotore seguire il
sole anche se abbiamo ancora un minimo di produzione
• GainNS e GainEO: opzionale. Se verde è impostata l’alta sensibilità del
sensore, se rossa la bassa sensibilità.
• Allarme: rosso indica la memoria di un allarme accaduto.
• Notte: indica che la luce è inferiore alla soglia notte e quindi il pannello si
è posizionato nella sua posizione caratteristica notturna, orizzontale e
verso est.
Stringa riepilogativa
29/38
Esiste una stringa che riepiloga i dati istantanei più significativi e premendo il
tasto LOG li regista in memoria insieme alla data e all’ora, per poi renderli
disponibili sulla apposita pagina di Log.
I dati sono:
Temperatura, massimo valore di luminosità rilevato e la direzione, la differenza
di luminosità tra nord e sud e quella tra est e ovest. Il valore è espresso da un
numero relativo.
7.2 Videata di configurazione
In questa pagina è possibile adattare il modulo ad ogni tipo di rotore
modificando i parametri di funzionamento della centralina.
7.2.1 Programmazione tempi
Ritardo accensione: numero di secondi minimo tra un movimento del motore
ed il successivo. Questo ritardo non viene applicato nel caso la differenza di
luminosità superi la soglia Accensione Motori Immediata.
Durata massima: numero massimo di secondi in cui un motore può rimanere
continuamente acceso. Deve essere impostato un tempo leggermente
30/38
maggiore di quello impiegato per andare da un fine corsa all’altro. Nel caso il
rotore si dovesse spegnere per timeout scatta l’allarme di Errore Fine Corsa.
7.2.2 Programmazione soglie
Soglia Notte: luminosità, la maggiore dei 4 trasduttori, sotto la quale la vela si
colloca in posizione notte. Orizzontale e verso est.
Soglia Poca Luce: luminosità, la maggiore dei 4 trasduttori, sotto la quale i
rotori non orientano più la vela in direzione della massima luminosità del cielo. Il
rotore sta fermo poiché sotto questo valore non vale più la pena di muoverlo.
Soglia spegnimento motori: durante la rincorsa verso il sole il sensore
continua ad aggiornarsi, quando la differenza tra i due trasduttori è inferiore o
uguale a questo parametro il motore di ferma. E’ utile metterlo diverso da zero
sono nel caso abbiamo inerzie importanti nello spostamento.
Soglia accensione motori: è la soglia di differenza di luminosità che mette in
moto il rotore. Più questo parametro è alto e minore sarà la precisione media di
puntamento ma minore sarà l’intervento dei motori.
Prima dell’attivazione del motore, rispetto all’ultimo movimento deve comunque
passare il tempo impostato in Ritardo Accensione.
Soglia accensione motori immediata: è la soglia di differenza di luminosità
che mette in moto il rotore immediatamente, cioè senza aspettare alcun tempo
di ritardo. E’ utile per spostare la vela in caso di forti convenienze in altre zone
del cielo e per il testing, oscurando con una mano una regione di cielo il rotore
si mette in moto immediatamente.
7.2.3 Destinazione allarmi: indirizzo e famiglia
E’ possibile installare il sensore vento in un solo rotore e poi scatenare da
questo l’allarme sugli altri. L’allarme verrà destinato ai moduli con questo
indirizzo e famiglia. Il valore zero è quello di broadcast, accettato da tutti i
moduli.
7.2.4 Fattori di scala
Il campo con i fattori di scala permette di compensare le differenze che si
riscontrano tra sensori accoppiati e le relative lenti.
I due parametri rappresentano il fattore correttivo delle misurazioni del Nord e
dell’Est.
Il numero qui impostato corregge la misura con la seguente relazione:
Misura usata = Misura letta + Misura letta x fattore di scala / 200
31/38
Il fattore di scala può essere negativo. Quando la Misura usata diventa
maggiore di 255, il valore rimane 255.
7.2.5 Soglie allarmi
Gli allarmi per poter essere efficaci devono essere abilitati nella pagina
Avanzate
Allarme taglio cavo: soglia sotto la quale scatta l’allarme di taglio cavi, il
numero tra parentesi è il numero rilevato dalla centralina, la soglia deve essere
minore del numero rilevato.
Batteria
Soglia sotto la quale scatta l’allarme di batteria scarica, il numero tra parentesi
indica il numero rilevato istantaneamente.
Allarme velocità del vento alta
Rimossa dalla versione 2.01 in avanti
Allarme produzione
Soglia sotto la quale scatta l’allarme produzione. Il valore tra parentesi indica il
numero letto istantaneamente.
Temperatura allarme incendio
Temperatura sopra la quale scatta l’allarme incendio.
Velocità vento pericolosa
Soglia sopra la quale scatta l’allarme Vento e la vela si mette in protezione.
32/38
7.3 Configurazione Avanzate
7.3.1 Abilitazioni
Controllo batteria
Abilita l’allarme di batteria scarica
Abilita allarme cavo TP
Abilita l’allarme 24 ore di taglio cavo di guardia
Abilita allarme CP
Abilita l’allarme sullo swith del quadro
33/38
Abilita allarme vento
Abilita l’allarme per velocità pericolose di vento. Se si intende usare questa
funzione, tenerla abilitata anche in caso di sensore non installato in quanto
l’allarme di un altro rotore provvisto di sensore può proteggere la vela.
Disabilita allarme di sovratemperatura
Se spuntato non viene controllato l’allarme di sovratemperatura.
Modalità cantiere
La modalità cantiere permette di effettuare alcuni comandi altrimenti non
accettati. In modalità cantiere è possibile fare il cambio di indirizzo
Invia stato ad altri moduli
Se spuntato in caso di allame vento invia l’allarme anche agli altri moduli
sprovvisti di sensore.
7.3.2 Imposta alta e bassa sensibilità
Opzionale: Permette di impostare la centralina ad alta e bassa sensibilità a
seconda delle necessità. La sensibilità viene riscontrata nella riga di stato Gain.
7.3.3 Modifica indirizzo
La modifica dell’indirizzo è indispensabile in caso di nuove installazioni su
impianti esistenti. In questo caso è necessario fare attenzione di modificare
l’indirizzo della centralina nuova arrivata in maniera tale da non ritrovare altre
coppie indirizzo- famiglia uguali nello stesso impianto.
Se vi sono 2 centraline in questa condizione sullo stesso bus è indispensabile
spegnerne una e quindi cambiare l’indirizzo a quella accesa e poi ripristinare
tutto.
7.3.4 EEprom
Questo pulsante apre una videata di debug in cui si può vedere il contenuto
della eeprom. Questa videata è dedicata a personale con privilegi molto alti in
quanto una variazione fortuita di un numero della tabella potrebbe portare a
malfunzionamenti.
34/38
8
8.1
Aggiornamento del firmware
Utilizzo del tool PickLoader
PickLoader è il software che consente di aggiornare il firmware all’interno degli
inseguitori solari. L’aggiornamento del firmware è consentito a partire dalla
versione 02.4, quindi inseguitori con versioni firmware precedenti non possono
essere aggiornati con la procedura descritta in questo paragrafo.
La schermata principale del programma è la sequente:
Il primo passo consiste nell’impostare correttamente la porta seriale e la
velocità di comunicazione (Baudrate), come riporta l’immagine seguente:
Cliccando su “AvviaCOM” verrà abilitata la comunicazione con il bus.
35/38
Successivamente dobbiamo inserire indirizzo e famiglia del modulo di cui
vogliamo aggiornare il firmware:
Cliccando su “leggi informazioni dal modulo” ricaviamo il tipo di modulo e la
versione del firmware in uso.
Possiamo adesso caricare nel programma il file nel formato S19 del nuovo
firmware:
Selezioniamo il percorso del file cliccando su “Apri file”.
Ora possiamo avviare la programmazione del modulo cliccando su “LOAD da
pick”:
36/38
Al termine del caricamento, se l’operazione è andata a buon fine, il modulo si
riavvierà da solo con in nuovo firmware. E’ possibile verificare la versione
utilizzando le apposite funzioni nel programma PICK Master.
NOTA: l’operazione di aggiornamento del firmware è molto delicata,
deve essere eseguita da personale qualificato ed autorizzato dalla DPM
Elettronica. Evitare in ogni modo che, durante l’operazione di
aggiornamento del firmware, venga a mancare l’alimentazione del
modulo.
In
caso
di
problemi
contattare
l’assistenza.
37/38
Attenzione
Possibili variazioni dei prodotto possono essere effettuate dalla casa
costruttrice senza preavviso.
38/38