Capitolo 2
La dinamica
Introduzione
Passiamo adesso alle leggi del moto. Cerchiamo dunque di capire cosa determina il moto
di un corpo. È abbastanza ben noto che lo studio della dinamica è essenzialmente uno studio moderno. Dice Ernst Mach∗: “Il fondatore della meccanica è Galilei. Ce ne rendiamo
subito conto se prendiamo in esame alcune proposizioni degli aristotelici suoi contemporanei. Per spiegare la caduta dei corpi pesanti, essi affermavano che ogni corpo cerca il
suo luogo naturale. Da poche e superficiali esperienze e osservazioni deducevano che i
corpi pesanti cadono più velocemente e i corpi leggeri più lentamente. Questo è sufficiente per capire quanto fossero irrilevanti le conoscenze dinamiche degli antichi, ossia dei
greci. Del resto già nell’antichità le teorie di Aristotele furono criticate e, in particolare,
l’assurda opinione che la prosecuzione del moto di un proiettile sia dovuta all’azione
dell’aria da esso mossa.”
Si parte proprio da questo punto: un corpo fermo evidentemente resta fermo, ma anche un
corpo che sia già in moto ad un certo punto si ferma.
Occorre naturalmente capire che c’è l’effetto degli attriti. E se potessimo eliminarli? Allora il moto proseguirebbe rettilineo ed a velocità costante (principio di inerzia). A ben
guardare, le cose sono un po’ più complesse, però il principio d’inerzia è la prima affermazione fatta in dinamica. La seconda verte sull’effetto di una forza applicata ad un corpo. Il secondo principio della dinamica ci mette in condizione di calcolare i moti, almeno
nei casi semplici, comunque sempre in linea di principio. Anche se, in certe situazioni, è
più facile usare i principi di conservazione: quantità di moto, momento della quantità di
moto, energia.
1.
Il principio d’inerzia
Il primo principio della dinamica o principio d’inerzia afferma che un corpo in moto rettilineo uniforme persiste nel suo stato di moto, se non interviene una causa esterna. Che
prove abbiamo che il moto persiste? Prendiamo un corpo, per esempio una pallina, e lanciamolo con una velocità iniziale ben precisa su di un piano.
Certamente il corpo si fermerà, ma possiamo come al solito fare una serie di esperimenti
parziali per giustificare il principio. Possiamo, per esempio, evidenziare che, mentre è
vero che un corpo lanciato su un piano si fermerà dopo aver percorso una certa distanza,
la distanza d’arresto è funzione dello stato della superficie del piano e del corpo. Possiamo
rendere più lisce le superfici e notare che più esse sono lisce, più spazio il corpo percorrerà prima di fermarsi.
∗
Ernst Mach, La meccanica nel suo sviluppo storico-critico, Universale Bollati Boringhieri, pag. 149.
Cap. 2 La Dinamica
Con un po’ di pazienza ci possiamo convincere che, mentre l’enunciato dichiara “se non
intervengono cause esterne”, queste cause esterne intervengono in realtà sempre. Quello
che possiamo fare è diminuirne l’effetto, fino a convincerci, con un processo al limite, che
eventualmente i corpi resterebbero in moto per sempre.
In realtà, un corpo che si muove su un piano cadrebbe se non ci fosse il piano a sostenerlo.
Presumibilmente ciò vuol dire che esso è soggetto ad una forza esterna, ma vuol dire anche che la reazione del piano annulla la forza che lo farebbe cadere, dunque è ragionevole
ammettere che l’insieme della forze esterne agenti sul corpo diano in totale un effetto nullo e pertanto tali forze possono essere ignorate.
Possiamo anche volgere gli occhi al cielo e provare ad interpretare quello che vediamo. I
pianeti girano intorno al sole. Guardando il loro moto non possiamo ricavare una prova
diretta del principio d’inerzia. Possiamo ricavarne però l’idea che moti praticamente eterni
esistono in situazioni in cui non c’è attrito.
L’enunciato del principio d’inerzia è semplice ma, se ci soffermiamo a riflettere per un
attimo, non tutto è così facile. La velocità di un punto materiale è in effetti, funzione del
sistema di riferimento cui riferiamo il movimento. Per conseguenza, se un punto si muove
di moto rettilineo uniforme in un sistema, esso non si muoverà uniformemente in un altro,
ma si muoverà di moto rettilineo uniforme solo nel sistema originale e in tutti i sistemi in
moto rettilineo uniforme rispetto a questo. Per esempio, per un sistema ( Σ ). in rotazione
.
a = a '+ ω × ρ + ω × ω × ρ + 2ω × v ' . Ne
segue che, se pure il principio d’inerzia è valido in Σ ' (cioè a ' = 0 ), esso non sarà valido in Σ (cioè a ≠ 0 ). Dunque, ammettiamo pure che esista un riferimento rispetto al
rispetto ad un altro ( Σ ' ) abbiamo trovato:
quale vale il principio d’inerzia, esso non sarà però valido in ogni sistema di riferimento,
ma solo in quelli in moto rettilineo uniforme rispetto al primo. Questo ci porta a chiederci
in quale riferimento il principio d’inerzia è valido, prendendo atto del fatto che, se esiste
un riferimento in cui esso è valido, esistono infiniti sistemi in cui è valido, ma esso non è
rispettato comunque in tutti i riferimenti.
In effetti, il principio d’inerzia sulla terra ha dei limiti, perché la terra si muove, ruota:
come si può affermare che un corpo lanciato continua a muoversi di moto rettilineo, se il
corpo in questione gira sulla terra e con la terra? Secondo I. Newton, la risposta va cercata
nel concetto di spazio assoluto. “Si sospenda, per esempio, un secchio a un filo assai lungo e gli si imprima un moto circolare continuo finché il filo divenga rigido a causa della
torsione. Lo si riempia d’acqua e lo si lasci in quiete assieme all’acqua. Con una forza
subitanea gli si imprima poi un moto circolare nel senso contrario. Lo corda svolgendosi,
persevererà a lungo in questo moto; all’inizio la superficie dell’acqua sarà piana, com'era
prima che il recipiente cominciasse a muoversi; ma in seguito questo, comunicando gradualmente la forza all’acqua, fa sì che essa cominci sensibilmente a girare. L’acqua si
allontana un po’ per volta dal centro e sale lungo le pareti del recipiente, assumendo la
forma concava” dunque in un primo momento l’acqua non si muove nello spazio assoluto
e dunque la sua superficie è piana, ma quando comincia a girare appaiono delle forze “apparenti”, “non inerziali”, generate dal moto accelerato rispetto allo spazio assoluto e que2
Cap. 2 – La dinamica
________________________________________________________________________
ste forze danno all’acqua la caratteristica superficie a forma di paraboloide. In un certo
senso, l’acqua “sa” di avere un’accelerazione nello spazio assoluto. Dunque si può dire
che sia lo spazio assoluto a generare queste forze apparenti ovvero si può dire che il principio d’inerzia vale solo nello spazio assoluto.
Secondo E. Mach, il vero problema è quello di definire questo sistema dello spazio assoluto. In fondo tutto quello che possiamo dire è che c’è un moto relativo fra vari corpi ovvero
che le distanze tra questi corpi variano col tempo: rispetto a quali corpi o sistemi di riferimento uno specifico corpo si muove di moto rettilineo uniforme se non intervengono forze esterne? La stessa critica applicata al tempo assoluto vale cioè per lo spazio assoluto.
Mach finisce con l’identificare il riferimento inerziale con il cielo delle stelle fisse: qui
vale il principio d’inerzia e per conseguenza in tutti i riferimenti in moto rettilineo uniforme rispetto a questo.
L’idea di uno spazio assoluto è fortemente suggerita in questa stampa del sistema tolmaico.
3
Cap. 2 La Dinamica
2.
Il secondo principio della dinamica
Cominciamo di nuovo dalla formulazione del secondo principio: Un corpo soggetto ad
una forza subisce un’accelerazione proporzionale alla forza. Notiamo subito che questa
affermazione include il primo principio della dinamica: se la forza è nulla, allora
l’accelerazione è nulla e la velocità deve essere costante. Separando il principio di inerzia
e stabilendolo come principio a parte si è voluto fare una forte affermazione sul fatto che
la velocità di un corpo non soggetto a forze non è necessariamente zero. Il coefficiente di
proporzionalità è la massa (inerziale). In formule: F = ma . A questo punto possiamo
definire operativamente la forza. La forza è da intendersi come un vettore: ciò che spinge
un corpo e lo accelera in una direzione deve avere necessariamente una direzione ed un
verso. Siamo adesso interessati a
…ma anche in questa del sistema copernicano non si è rinunziato allo spazio assoluto.
4
Cap. 2 – La dinamica
________________________________________________________________________
Kandinskij sembra avere le idee più chiare.
definire delle operazioni di misura che associno alla forza un modulo, una direzione ed un
verso.
Tra le forze delle quali abbiamo una conoscenza immediata ed intuitiva c’è la forza-peso.
Sappiamo tutti di essere soggetti ad una forza che ci fa cadere verso il basso, la cosiddetta
“forza-peso”. Prendiamo dunque questa forza come esempio per darne una definizione
operativa. Si sa che alcuni materiali, come la gomma ecc... mostrano delle proprietà speciali quando sono soggetti ad una forza: si allungano e generano a loro volta delle forze
che bilanciano la forza esterna applicata.
Si può dire la stessa cosa delle molle. Dunque prendiamo una molla di gomma oppure
d’acciaio, di lunghezza l. Appendiamo ad essa un peso, come mostrato in fig. 1. Il peso
potrebbe essere un cubetto di metallo di volume V.
La molla si allunga e possiamo notare di quanto si allunga. Diciamo ∆l . Supponiamo di
prendere adesso un cubetto dello stesso metallo, ma di volume doppio. Appendiamolo alla
5
Cap. 2 La Dinamica
stessa molla e noteremo che l’allungamento stavolta è doppio: 2∆l . Possiamo continuare,
notando che gli allungamenti sono proporzionali al volume dei cubetti e alla lunghezza
originale della molla. Dunque potremmo stabilire che vale la seguente legge (di Hooke):
∆l
= K ρVg , con:
l
Fig. 1: Misura della forza peso
con una molla (dinamometro).
K pari al coefficiente caratteristico della molla usata (come possiamo vedere utilizzando
vari tipi di molle) e ρ dipendente dal metallo usato per fabbricare il pesetto. Possiamo
poi decidere di considerare la quantità ρ come quella che ci indica, per ogni materiale, il
peso del volume unitario. La chiamiamo “densità” del materiale e prendiamo quindi il
prodotto ρV come il peso del cubetto. A questo punto possiamo definire come peso unitario (1kg-peso, 1g-peso, 1£ (libbra)–peso, ecc...) quello di un cubetto di un qualsiasi materiale che appeso ad una molla di ben definita composizione e fabbricazione produce un
allungamento definito della stessa. Possiamo dunque esprimere i pesi di vari pezzi di materiale in unità standard e paragonarli tra loro. Inutile dire che il peso è una forza diretta
verticalmente verso il basso. Abbiamo dunque stabilito un metodo di misura delle forze. È
possibile anche definire una quantità di materia o massa unitaria (1kg, 1g, 1£, ecc..), come
quella avente un peso unitario.
Possiamo a questo punto riprendere la stessa sfera e lo stesso piano idealmente lisci che
abbiamo usato nel paragrafo precedente per fare le nostre esperienze sul principio
d’inerzia, ed applicare alla sfera mediante un filo, la forza di un peso resa orizzontale grazie ad una carrucola.
F
Filo
Fig. 2: Verifica sperimentale
del secondo principio della dinamica.
Carrucola
P
6
Cap. 2 – La dinamica
________________________________________________________________________
Essendo noto il peso, che abbiamo imparato a misurare attraverso la procedura sopra descritta, possiamo adesso misurare le accelerazioni subite dalla sferetta, e verificare sperimentalmente il secondo principio della dinamica (si veda lo schema in fig. 2).
Un altro tipo di esperimento che possiamo eseguire è quello che utilizza un piano inclinato.
Il peso agisce sempre verticalmente, ma a causa della reazione vincolare del piano solo la
sua componente parallela al piano farà muovere la pallina. Variando l’inclinazione del
piano possiamo variare la forza P sin α che agisce sulla pallina nel suo cammino dal punto
0 al punto P . Per una data inclinazione del piano, è possibile verificare la proporzionalità
della forza con l’accelerazione.
P
α
Fig. 3: Piano inclinato (verifica della proporzionalità tra forza ed accelerazione).
Possiamo anche verificare una legge, scoperta da Galileo e di importanza enorme:
l’accelerazione con la quale il corpo cade non dipende dal peso del corpo. Basta variare
composizione e dimensioni della pallina e misurarne nuovamente l’accelerazione. Troveremo sempre che l’accelerazione è a = gsenα , con g=9,81m/s2.
Di conseguenza: Psenα = ma = mgsenα ⇒ P = mg . Il peso, altro non è che la forza gravitazionale (vedi prossimo capitolo) esercitata dalla terra su un qualunque corpo sulla sua
superficie ed è proporzionale alla massa del corpo: è questo l’unico modo in cui una forza
può produrre un’accelerazione indipendente dalla massa del corpo.
Un punto notevole da ricordare è che, se un punto materiale è soggetto a più forze contemporaneamente, allora ciò che occorre considerare è la risultante di tutte le forze. Occorre cioè sommare vettorialmente tutte le forze e la risultante darà l’accelerazione totale.
Questo è un risultato sperimentale ben verificato.
Ritorniamo adesso alla questione delle forze non inerziali. Chiunque si sia trovato a viaggiare su di un autobus, ha fatto esperienza delle forze non inerziali. Il passeggero si trova
spinto lateralmente ad ogni curva e davanti o indietro ad ogni frenata o accelerazione. Nel
sistema “autobus in accelerazione” appaiono delle forze agenti sul nostro corpo proporzionali alla nostra massa e all’accelerazione dell’autobus. La spiegazione nell’ambito della teoria newtoniana è che nel sistema non inerziale, o in accelerazione rispetto allo spazio
assoluto, il passeggero tende, a norma del principio d’inerzia, a mantenere il suo stato di
7
Cap. 2 La Dinamica
moto precedente. Dunque, si trova accelerato rispetto all’autobus (anch’esso in effetti accelerato). Il passeggero si sente pertanto spinto da una forza pari appunto a questa accelerazione per la sua massa.
In effetti, data la loro origine cinematica, tutte le forze non inerziali sono proporzionali
alla massa del corpo su cui agiscono.
Un caso particolarmente interessante è quello dei moti circolari: in un sistema in rotazione
un osservatore è soggetto alla “forza centrifuga”. Per esempio, un passeggero su una giostra in movimento si sente spinto verso l’esterno da tale forza che è uguale alla sua massa
per l’accelerazione ”centrifuga”, uguale in modulo, ma di verso opposto a quella centripeta. Per capire questo punto, immaginiamo un corpo puntiforme in moto circolare intorno
all’origine di un sistema inerziale.
Una stringa inestensibile forza il punto a muoversi in cerchio. Un dinamometro è inserito
nella stringa per misurare la forza. Per un osservatore nel sistema inerziale, la forza misurata è quella che tiene il punto in moto circolare; senza questa forza “centripeta”, il punto
se ne andrebbe via in linea retta a norma del principio d’inerzia, allontanandosi
dall’origine del riferimento. Tuttavia per un osservatore solidale con la stringa, cioè
sull’asse X’ (vedi fig. 4), esiste una forza che spinge il punto verso l’esterno, cioè verso
distanze sempre più grandi dall’origine, dunque una forza “centrifuga”, in valore uguale
alla centripeta, come misurata dall’allungamento della molla del dinamometro. Sappiamo
ɺ ɺ + ρθɺɺ)kt . Poiché non ci sono forze reali, dobche l’accelerazione è ( ρɺɺ − ρθɺ 2 ) k ρ + (2 ρϑ
2 ɺ
ɺ ɺ + ρθɺɺ)kt = 0 , ovvero ρɺɺ = ρθɺ2 θɺɺ = − ρϑ
ɺ , moltiplibiamo avere: ( ρɺɺ − ρθɺ 2 ) k ρ + (2 ρϑ
ρ
2
ɺ ɺ , in cui il termine a sinistra può
cando per la massa, si ha: m ρɺɺ = m ρθɺ 2 e m ρθɺɺ = − mρϑ
ρ
interpretarsi come massa per accelerazione e quello di destra come forza (apparente) oppure possiamo dire che non essendoci forze (reali) l’accelerazione complessiva deve esseɺ ɺ = 0 . Queste
re zero che è il significato delle prime due equazioni ρɺɺ − ρθɺ2 = 0 e ρθɺɺ + ρϑ
Y
Dinamometro
P
X
X’
Fig. 4: Forza centrifuga.
8
Cap. 2 – La dinamica
________________________________________________________________________
Due equazioni, sono valide in ogni riferimento, tra l’altro ammettono come soluzione
ρ = costante e ϑ = costante, sono cioè valide in un sistema inerziale e in sistemi ruotanti.
In tutto ciò, c’è però un punto che appare particolarmente strano: la massa che usiamo nel
secondo principio della dinamica, la massa inerziale, è la stessa massa che appare nel peso: la massa gravitazionale.
Quest’ultima, in linea di principio, è tutt’altra cosa, essendo la sorgente del peso e non
quella dell’inerzia. Abbiamo infatti già visto che P = m g g = m i a , dove si è distinta mg,
generatrice dell’attrazione terrestre, da mi che è invece la costante di proporzionalità tra
forza ed accelerazione. Tuttavia, avendo trovato che l’accelerazione è sempre uguale
all’accelerazione di gravità, dobbiamo dedurne che le due masse sono uguali e far cadere
la distinzione. Questa identità è però un accidente straordinario che non trova una spiegazione nella meccanica newtoniana.
Un altro punto da notare è che le forze non inerziali e la forza peso o, più in generale, le
forze gravitazionali sono entrambe proporzionali alla massa inerziale. Da questo punto di
vista dunque, forze non inerziali e gravità sono equivalenti. Riprenderemo questi punti più
avanti. Adesso ci dobbiamo porre una domanda. Supponiamo di avere un punto materiale
di massa m, soggetto ad una forza nota F = F ( x, y, z ) . Sotto quali condizioni il moto del
punto materiale risulta essere definito? Ci aspettiamo, infatti, che la nostra conoscenza
della dinamica sia a tale livello da consentirci di calcolare univocamente la traiettoria e
tutte le altre caratteristiche del moto del punto materiale. Il secondo principio è sufficiente
a farci calcolare tale moto? La risposta è positiva, se le condizioni iniziali sono assegnate
in aggiunta a massa e forze.
Per condizioni iniziali, intendiamo l’insieme di sei quantità: la posizione iniziale
P0 = ( x0 , y 0 , z 0 ) e la velocità iniziale v 0 = ( v 0 x , v 0 y , v 0 z ) . Basta dunque la conoscenza
della posizione e delle velocità del punto ad un istante, oltre alla conoscenza della forza
su di esso applicata, per determinare il moto futuro e passato del punto.
Vediamo perché. Il secondo principio F = ma è un’equazione vettoriale che possiamo
dividere nel sistema di tre equazioni differenziali:
d 2x
Fx ( x, y , z ) = m 2
dt
d2y
Fy ( x, y, z ) = m 2
dt
d 2z
Fz ( x, y , z ) = m 2
dt
9
Cap. 2 La Dinamica
x = x (t )
È la matematica ad assicurare che, dato il valore delle sei funzioni: y = y (t ) e
z = z (t )
v x = v x (t )
v y = v y (t ) ad un istante t = t 0 , il sistema di equazioni rappresentato dal secondo princi
v z = v z (t )
x = x (t )
pio ammette una ed una sola soluzione nelle tre funzioni y = y (t ) , che risultano
z = z (t )
così determinate.
Le componenti della velocità possono poi essere calcolate per differenziazione.
Chiaramente questo è un punto estremamente importante.
Grazie al secondo principio possiamo completamente risolvere ogni problema di natura
meccanica∗.
Occorre però aggiungere che il sistema di equazioni scritto può risultare difficile da risolvere analiticamente. L’esistenza ed unicità delle soluzioni non implica che si sia in grado
di trovarle. In nostro aiuto vengono a volte i cosiddetti integrali primi del moto. Esistono
come vedremo a partire dal par. 6, delle quantità meccaniche come l’energia, la quantità
di moto ed il momento della quantità di moto che sono conservate nei sistemi isolati, cioè
non soggetti a forze esterne. Queste leggi di conservazioni si scrivono matematicamente
nel modo: f ( x, y, z , xɺ, yɺ , zɺ) = cost . Evidentemente si tratta di equazioni differenziali del
primo ordine e dunque più semplici da risolvere rispetto al secondo principio della dinamica. In particolare, nel caso di un moto in una sola variabile, l’espressione della conservazione di una sola quantità meccanica sarà sufficiente a calcolare il moto. Si veda, per
esempio, il pendolo cicloidale del par. 5. Se le variabili da considerare sono più di una, si
potrà trovare più di una quantità conservata. Per esempio, gli urti descritti al par. 5 (conservazione dell’energia e della quantità di moto) o il problema dei moti centrali (conservazione dell’energia e del momento della quantità di moto) illustrato al Cap. 4.
∗
Le cose non sono sempre così semplici. Le condizioni iniziali vanno misurate, ed ogni
misura comporta degli errori. Tuttavia, anche con condizioni iniziali non assolutamente
esatte, ci si aspetta comunque che i moti siano molto prossimi per condizioni iniziali prossime: se faccio un piccolo errore sulla determinazione della posizione o della velocità della cometa di Halley, troverò che essa ritorna ad un tempo un po’ diverso da quello calcolato. Questo però non è vero per ogni dominio d’applicazione. In certi settori, notabilmente
la meteorologia, una piccola modifica delle condizioni iniziali porta a grandi divergenze
nei risultati. È da queste considerazioni che è nata la teoria del Caos. Vedi per esempio: J.
Gleich, Caos, Biblioteca Scientifica Sansoni.
10
Cap. 2 – La dinamica
________________________________________________________________________
Questo trionfo della meccanica ha dato luogo nel settecento ad una tendenza filosofica
chiamata “meccanicismo”, secondo la quale lo sviluppo di qualsiasi processo è prevedibile: basta conoscere le leggi di forza appropriate e lo stato del sistema ad un dato istante.
Dicono I. Prigogine e I. Stengers∗∗: “All’inizio del XIX secolo, il programma newtoniano,
vale a dire la riduzione dell’insieme dei fenomeni fisico–chimici all’azione delle forze… è
divenuto il programma ufficiale del gruppo scientifico più potente e prestigioso. Intendiamo parlare di Laplace che domina il mondo scientifico nello stesso momento in cui
l’impero napoleonico domina l’Europa.”
Con le parole di Paul Davies∗∗∗: “So successful did Newton’s laws of mechanics prove to
be that many people assumed they would apply to literally every physical process in the
universe… Whereas most ancient cultures viewed the cosmo as a capricious living organism, subject to subtle cycles and rhythms, Newton gave us rigid determinism.”
Finalmente, vogliamo puntualizzare alcuni fatti:
• Poiché il secondo principio usa la derivata seconda rispetto al tempo delle coordinate
spaziali, l’inversione dell’asse dei tempi ( t → −t ) lascia l’equazione invariata. In altri
termini per essa vale l’invarianza temporale di cui abbiamo parlato al capitolo primo.
• L’unità di tempo, il secondo, è definito come 1/86400 del giorno solare medio.
• L’unità di lunghezza è la quarantamilionesima parte del meridiano terrestre.
• L’unità di massa è il kg. È la massa di un litro di acqua a 4 gradi centigradi ( 4°C )∗.
• L’unità di forza è il Newton. Il Newton è l’intensità di una forza che applicata alla
massa unitaria di un kg produce l'accelerazione di 1m al secondo per secondo.
• Poiché la forza peso di un chilogrammo è il prodotto della massa di un kg per
l’accelerazione di gravità, avremo che un kg-peso vale 9,81 Newton.
• La densità è definita come il rapporto tra massa e volume e quindi si misura in kg per
metro cubo ( kg / m 3 ). Spesso però è più conveniente misurarla in grammi per centimetro cubo: 1g / cm 3 = 10 3 kg / m 3 .
Queste sono le definizioni delle unità come stabilite nell’ottocento. Le unità attuali
sono alquanto diverse. Nel primo capitolo abbiamo visto l’attuale definizione di secondo. Il metro è la trecento milionesima parte della lunghezza percorsa dalla luce in
un secondo. Il chilo ha mantenuto la definizione nella nota a pie’ di pagina..
3.
L’oscillatore armonico ed il pendolo
∗∗
I. Prigogine e I. Stengers , La nuova alleanza, G. Einaudi (198).
P. Davies, About time, Penguin, pag. 31 (1995).
∗
In realtà, il chilogrammo è la massa di un cilindro di platino-iridio, conservato a Sèvres
in Francia, presso l’Ufficio Internazionale dei Pesi e delle Misure. È anche pari al peso di
un litro d’acqua, come misurato da A. Lavoissier alla fine del ‘700. Egualmente, il metro è
la lunghezza del metro campione di Sèvres, pari ad un quaranta milionesimo del meridiano terrestre passante per Parigi, come misurato da J. B. Delambre e P. Méchain negli anni
’90 del ‘700 con una serie di triangolazioni da Dunkerque a Barcellona.
Il metro, come il secondo, ha oggi una definizione più complicata: vedi nota al capitolo
precedente.
∗∗∗
11
Cap. 2 La Dinamica
Si tratta di due problemi, entrambi unidimensionali, che possiamo risolvere usando il secondo principio della dinamica. Utilizziamo i primi tipi di forza cha abbiamo studiato: le
forze elastiche e la forza peso.
In forma vettoriale la legge di Hooke si scrive: F = − k∆x . In altre parole, la forza di richiamo elastica è proporzionale ed ha il segno opposto allo spostamento.
F = − kx
X
Fig. 5: Oscillatore armonico.
Dal secondo principio della dinamica otteniamo: F = −kx = m
d 2x
d2x
dt 2
, che possiamo riscri-
k
x = −ω 2 x .
m
dt
Questa equazione ammette come soluzione: x(t ) = X 1 cos(ωt ) + X 2 sen (ωt ) . La quantità
vere come:
2
=−
k
è detta “pulsazione” dell’oscillatore armonico. Le due funzioni armoniche acm
2π
quisiscono lo stesso valore ad ogni “periodo” T, tale che: ω (t + T ) = ωt + 2π ⇒ T =
.
ω
1
L’oscillatore armonico va attraverso ν =
periodi o oscillazioni per unità di tempo: ν è
T
la “frequenza”. La frequenza è misurata in Hertz: 1 Hertz è pari ad una oscillazione al
secondo. La pulsazione rappresenta il numero di volte per secondo che l’oscillatore armonico varia il suo argomento di 2π1.
ω=
Il pendolo è un sistema simile. Come si vede in fig. 6, la forza peso applicata alla pallina
(si suppone che il filo di lunghezza l sia senza peso ed inestensibile) si può decomporre in
due componenti: una tende ad allungare il filo, l’altra fa cadere il pesetto lateralmente.
1
A futura memoria, diciamo che: l’energia cinetica e quella potenziale (vedi oltre nel ca1m 2 2
pitolo) sono in media su un periodo uguali e sono: T = V =
A0 ω e
2 2
1
E = T + V = mA02ω 2
2
12
Cap. 2 – La dinamica
________________________________________________________________________
Fig. 6: Pendolo
semplice
θ
l
Pθ
Pl
θ
P
Proviamo a scrivere il secondo principio della dinamica: Pθ = Psenθ = − ml
d 2θ
. Qui,
dt 2
evidentemente, l’accelerazione è tangenziale. Per piccoli angoli, poniamo: senθ ≈ θ e
sostituiamo: Psenθ ≅ mgθ = −mlθɺɺ . Questa equazione può essere riscritta come:
g
. Anche qui si tratta di una oscillazione del tipo:
l
l
θ = θ 1sen (ωt ) + θ 2 cos(ωt ) di periodo T = 2π
. Notiamo che questa formula suggeg
risce che possiamo misurare g, misurando il periodo di un pendolo. Finora abbiamo assunto che g sia in effetti costante dappertutto. Questo però non è vero. Prima di tutto la
distribuzione delle masse nella crosta terrestre ne fa cambiare il valore localmente. In aggiunta, la forma della terra non è una sfera, ma rassomiglia piuttosto ad un ellissoide.
Il valore effettivo di g è però modificato anche dalla forza centrifuga, dovuta al fatto che
la terra gira sul suo asse. All’equatore questa forza centrifuga è massima, in quanto il raggio assume il massimo valore, e la forza centrifuga dipende dal raggio: Fc = mω 2 r . Per la
stessa ragione la forza centrifuga è nulla ai poli*. Occorre poi proiettare la forza centrifuga
sulla direzione verticale. Tale proiezione dipende dal coseno della latitudine (vedi fig. 7).
La fig. 7 aiuta a visualizzare qualitativamente l’effetto. Nell’anno 1930, si convenne internazionalmente di adottare una formula standard che esprimeva la variazione di g al
livello del mare con la latitudine ϕ nel modo seguente:
θɺɺ + ω 2θ = 0 , con: ω 2 =
g = 9,78049 ⋅ (1 + 0,0052884⋅ sen 2ϕ − 5,9 ⋅10 −6 ⋅ sen 2 2ϕ )m / s 2 . Questa formula è basata
sull’approssimazione della forma terrestre ad un ellissoide
x2 + y2
a2
+
z2
b2
= 1 le cui di-
*
La prima osservazione di un effetto della latitudine su g fu effettuata da Jean Richer nel
1672, durante una spedizione da Parigi alla Cayenne (4° 56’ 4”). Una seconda spedizione
l’anno successivo confermò tale osservazione.
13
Cap. 2 La Dinamica
mensioni erano state convenute internazionalmente (Madrid, 1924) essere pari a:
a −b
1
a = 6378,388km e s =
=
, con a semiasse maggiore (b minore) e s, ”schiaca
297.0
ciamento”, rispettivamente.
N
Forza centrifuga Fc
g
Ellissoide, non sfera!
Fig. 7: L’accelerazione g non è costante.
Un altro esempio di oscillatore è costituito da un pesetto che possiamo immaginare di far
cadere, in assenza di attrito, in un lungo tunnel che attraversa la terra∗. La forza agente sul
pesetto di massa m alla distanza r dal centro della terra, è la gravitazione dovuta alla massa interna alla sfera di raggio r. La massa esterna a questo raggio non ha alcun effetto sul
pesetto.
r
O
Fig. 8: Un altro esempio di oscillatore: pesetto all’interno di un tunnel che attraversa la
Terra.
∗
Di questo problema parla Dante nell’Inferno Canto XXXIV, Una discussione di questo
problema si trova nell’Almagesto di Tolomeo (Ptolemy’s Almagest translated and annotated by G.J. Toomer, Princeton University Press, 1998, pag. 44) . Lo stesso problema è
trattato (circa 1550) in: Nicolò Tartaglia, La Nova Scientia, A. Forni editore, Bologna
1984, libro primo pag.4.
14
Cap. 2 – La dinamica
________________________________________________________________________
Consigliamo allo studioso lettore di ritornare su questo punto appena avremo studiato il
4
1
teorema di Gauss nel prossimo capitolo. La forza sarà così: F = −Gm πρr 3 2 = − kr . E
3
r
2
k
dunque l’equazione del moto si potrà scrivere come: ɺrɺ + ω r = 0 , con ω =
.
m
4.
Il terzo principio della dinamica e la quantità di moto
Il terzo principio della dinamica stabilisce la conservazione della quantità di moto od in
maniera equivalente il fatto che le forze che masse all’interno di un sistema isolato esercitano una sull’altra sono uguali e di verso opposto. Prendiamo due masse isolate: il fatto
che le forze siano uguali e di segno contrario significa che: F1 = − F2 , ma, considerato che
per il secondo principio possiamo scrivere ogni forza come prodotto di massa per acceledv
dv
d
razione, abbiamo: m1 1 + m 2 2 = 0 ⇒ ( m1 v1 + m 2 v 2 ) = 0 . Se definiamo “quantità
dt
dt
dt
di moto” p di una particella il prodotto: p = mv , allora possiamo dire, a norma del terzo
principio, che la quantità di moto totale: P = m1v1 + m2 v 2 delle due particelle è “conservata”, cioè è costante nel tempo.
Se invece di un sistema di due particelle, ne prendiamo uno con N masse m1 ,..., m N , sempre sotto l’assunzione che il sistema non sia soggetto a forze esterne, possiamo
generalizzare il risultato precedente e dire che la quantità di moto del sistema
d
d
P=
mvi è conservata: P =
mv i = 0 . Possiamo poi prendere il punto definii
i
dt
dt
mq
i i i
to dal vettore posizione: Q =
, dove i vettori qi sono i vettori posizione degli N
mi
∑
∑
∑
∑
i
punti del sistema. Derivando rispetto al tempo, si può notare che questo punto ha accelerazione nulla, ovvero si muove di moto rettilineo uniforme. Infatti:
dQ d
=
dt
dt
∑mq =∑mv
∑m ∑m
i i
i
i
i
i i
i
i
i
=
1
P , e derivando nuovamente, essendo P costante, otM
terremo zero. Il punto Q definito dalle coordinate date si chiama “baricentro”. Dunque: il
baricentro di un sistema isolato si muove di moto rettilineo uniforme. Illustriamo il terzo
principio con un esempio. Tutti sappiamo che un razzo funziona espellendo gas ad alta
velocità. L’espulsione di una massa di gas ad alta velocità, fa sì che una quantità di moto
pari al prodotto della massa di gas espulsa per la sua velocità lasci il razzo stesso: per conseguenza il razzo deve muoversi in avanti con una variazione di velocità tale da lasciare la
15
Cap. 2 La Dinamica
quantità di moto totale costante∗. Possiamo adesso scrivere le equazioni del moto del razzo a partire dalla conservazione della quantità di moto del sistema. Prendiamo un razzo di
massa m = m(t ) ; la massa del razzo evidentemente varia perché esso espelle gas a velocità − v g (rispetto al razzo ovvero a razzo fermo). Supponiamo che ad un certo istante t, il
razzo abbia massa m e si muova con velocità v. All’istante t+dt esso avrà espulso
un’ulteriore quantità dm di gas e la sua velocità e massa saranno variate di dv e dm rispettivamente. Dovrà essere: Piniziale = P finale , perché si abbia la conservazione della quantità
di moto. Quindi, potremo scrivere che: ( m + dm )( v + dv ) + ( − dm )( − v g + v ) = mv . Il primo
termine rappresenta la quantità di moto del razzo dopo l’espulsione del gas, quantità di
moto che è cambiata perché sono cambiate sia la massa che la velocità del razzo. Il secondo termine Pg = m g ( v − v g ) rappresenta la quantità di moto del gas espulso, pari alla sua
massa per la sua velocità −v g + v rispetto al suolo. La massa di gas espulso è uguale alla
variazione della massa del razzo, cambiata di segno perché la massa del razzo diminuisce
(cioè dm è negativa). Semplificando e trascurando il prodotto di due differenziali, si ottiene: mdv = − v g dm , equazione che possiamo integrare separando le variabili a partire dalle
m0
. Palesemente la velocità
m
del razzo non può eccedere di molto v g ∗∗, perché la massa finale non sarà troppo più piccola di quella iniziale. Supponendo che il combustibile venga bruciato a ritmo costante
t
t
m0
, si avrà che: m = m0 (1 − ) , e dunque: v = v g ln( 0 ) . Lo spazio percorso al
t0
t0 − t
t0
condizioni iniziali: v = 0 e m = m0 . Otteniamo: v = v g ln
∗
Quando, agli inizi del secolo scorso, R. Goddard, uno dei pionieri della propulsione a
razzo, propose l’uso dei razzi per i viaggi interplanetari fu attaccato dal New York Times,
dove venne scritto che il Professor Goddard “lacked the knowledge ladled out daily in
high school”. Lo studioso lettore farebbe bene a riflettere sugli errori del presuntuoso
giornalista.
∗∗
La velocità dei gas è intorno ai 2km/s per un razzo a combustibile solido (Hill & Peterson, Mechanics and thermodynamics of propulsion, Addison and Wesley, pag. 374), circa
5km / s per la miscela H 2 + O2 . Questa velocità, che si traduce in 7200 km/h, sembra
molto alta, ma va confrontata con le velocità di fuga, definita e calcolata nel Cap. 4.
14
Cap. 2 – La dinamica
________________________________________________________________________
Alla partenza, il razzo è
fermo: la quantità di moto
totale è
P=0
Accesi i motori, il gas esce
posteriormente con la
quantità di moto Pg . Per
conseguenza, il razzo si
muove in avanti con la
stessa quantità di moto col
segno cambiato.
Pr = − Pg
Pg
t
)) . Il problema può essere completato agt0
giungendo l’effetto del peso del razzo e integrando di nuovo (si veda la sezione dedicata
agli esercizi
tempo t sarà perciò: s = v g (t − (t − t 0 ) ln(1 −
Fig. 9: Funzionamento di un razzo
F1
4
v (km/s)
vg=2,5 km/s; t0=100 s
2
0
0
10
20
30
40
50
60
70
80
t (s)
15
Cap. 2 La Dinamica
F1
140
120
vg=2,5 km/s; t0=100 s
Altitudine (m)
100
80
60
40
20
0
0
10
20
30
40
50
60
70
80
t(s)
F1
150
vg=2,5km/s; t0=100s t =80 s
max
Altitudine (m)
100
50
0
0,0
0,5
1,0
v/vg
5.
16
Il lavoro e l’energia cinetica
1,5
Cap. 2 – La dinamica
________________________________________________________________________
Se una forza fa muovere un punto materiale di un trattino infinitesimo ds , definiamo “lavoro infinitesimo effettuato dalla forza”, la quantità: dL = F ⋅ ds . Il lavoro totale fatto
B
∫
dalla forza per spostare il punto da A a B sarà: L = F ⋅ ds . In generale occorrerà specifiA
care il “cammino”, cioè la linea lungo la quale occorre calcolare l’integrale, non essendo a
priori evidente che l’integrale non dipenda dalla linea scelta. Usando d’altra parte il sedv
ds
⋅ ds = m ⋅ dv = mv ⋅ dv , per
condo principio, possiamo scrivere che: dL = F ⋅ ds = m
dt
dt
1
cui il lavoro finito per spostare il punto materiale da A a B sarà: L = m(v 2 − v 02 ) . I ter2
1 2
mini del tipo T = mv che appaiono a secondo membro rappresentano l’“energia cine2
tica” del punto materiale. Possiamo allora dire che il lavoro fatto dalla forza nel cammino
da A a B è uguale alla variazione della sua energia cinetica. Così possiamo definire due
grandezze scalari che hanno speciali caratteristiche: l’energia cinetica ed il lavoro. Una
caratteristica l’abbiamo appena vista, e consiste nel fatto che la forza modifica le caratteristiche del moto del punto e gli fa acquistare qualcosa che prima non aveva od aveva in
misura minore. Con le definizioni date, il qualcosa fatto dalla forza è il lavoro ed il qualcosa ricevuto dal punto è energia cinetica. In effetti si vede che se la forza è nulla,
l’energia cinetica si conserva. Questa è una conseguenza del principio d’inerzia che determina anche la conservazione della quantità di moto. Più in generale, qualunque quantità
sia costruita con la velocità e la massa della particella si conserva. In aggiunta, possiamo
p2
. Conservandosi l’energia cinetica, si conserva il modulo dell’impulso e
2m
viceversa. Perché dunque la definizione di energia cinetica aggiunge qualcosa a quello che
già conoscevamo?
Per cercare di rispondere a questa domanda dobbiamo fare un passo indietro. Noi abbiamo
familiarità con la fatica muscolare: lo spingere un oggetto pesante su di un pavimento anche ben liscio, ci costa evidentemente fatica: noi applichiamo una forza ed effettuiamo del
lavoro. Cosa acquisisce dinamicamente l’oggetto per questa nostra fatica? La sua velocità,
intesa sia in senso scalare che in senso vettoriale, e quindi la sua energia cinetica e la sua
quantità di moto. Tuttavia, noi abbiamo trovato due quantità: il lavoro e l’energia cinetica,
che esprimono, attraverso la relazione trovata, che ciò che si è fatto in termini di lavoro
viene ritrovato nel corpo pesante in termini di energia cinetica. Del resto, si può fare il
cammino inverso. Supponiamo che il nostro punto materiale in moto incontri un altro corpo, inizialmente fermo, e lo colpisca. Questo secondo punto materiale, colpito, si mette in
moto: ha dunque acquisito energia cinetica. La questione che si pone è: l’energia acquisita
dal secondo punto è uguale a quella persa dal primo? Una risposta positiva implica che
l’energia viene conservata nell’urto, ma anche che il primo punto ha, con la sua energia
cinetica, la capacità di fare del lavoro su un altro corpo variandone l’energia cinetica di
tanto quanto ne perde esso stesso. Dunque, nel caso di risposta positiva, la definizione di
energia cinetica sarebbe una definizione “buona” nel senso che darebbe conseguenze utili.
Proviamo allora a calcolare quello che succede in una collisione tra due punti materiali di
scrivere: T =
17
Cap. 2 La Dinamica
massa m1 e m2, ammettendo che sia la quantità di moto, sia l’energia cinetica, si conservino. Possiamo poi confrontare con l’esperimento e verificare se la conservazione
dell’energia cinetica ci dà risultati in accordo con l’esperienza.
p1
p0
θ
X
φ
p2
Fig. 10: Urto tra due corpi in due dimensioni.
L’esperimento può essere effettuato utilizzando due palline appoggiate su di un piano liscio: un biliardo. Indichiamo con p 0 (0) e p1 ( p 2 ) le quantità di moto iniziale e finale del
primo (secondo) punto, come mostrato in fig. 10.
Imponiamo la conservazione dell’impulso e dell’energia cinetica:
p 0 = p1 cos θ + p 2 cos φ
0 = p1senθ + p 2 senφ
2
2
2
E = p 0 = p1 + p 2
2m1 2m1 2m 2
Da queste equazioni non si può derivare lo stato finale, perché si tratta di tre equazioni
con quattro incognite: le componenti dei due impulsi finali o, se preferite, i due moduli (p1
e p2) e gli angoli di uscita (θ e φ) dei due punti materiali. Possiamo però esprimere tre delle quantità finali in funzione di una. Per esempio, prendiamo θ come variabile finale indipendente ed esprimiamo i moduli dei due impulsi finali e l’angolo φ come funzioni di θ.
Quadriamo le prime due relazioni e sommiamole, ottenendo: p02 + p12 − 2 p1 p0 cosθ = p22 .
Sostituiamo nella terza e, dopo qualche manipolazione, otterremo:
p12 − 2
p0 cos θ
m − m1
m1 p1 − p02 2
=0.
m1 + m2
m1 + m2
p1 =
p0
( m1 cos θ ± m12 cos 2 θ + m22 − m12 ) =
m1 + m2
18
Ne segue che:
Cap. 2 – La dinamica
________________________________________________________________________
= p0
m1
m2
(cos θ ± cos 2 θ + 22 − 1) 2. Per m1 > m2 entrambi i segni danno
m1 + m2
m1
luogo a soluzioni valide come si vede dal grafico polare in basso in cui la linea solida rappresenta la soluzione con il – e la tratteggiata la soluzione con il +. Per ogni direzione θ ,
si vede bene che esistono due soluzioni una “breve” e una “lunga”. In effetti siamo partiti
da tre equazioni di cui due lineari e una quadratica anche fissando delle quattro incognite
una (cioè θ ) abbiamo due soluzioni per p1 e non una sola.
Da notare che, con masse uguali, la prima massa si ferma cedendo tutta la sua quantità di
moto alla seconda.
Consideriamo adesso il caso m1 < m2 . Dobbiamo adesso scegliere il segno positivo per
evitare di avere
p1 = p0
p1 negativo ( p1 è il modulo di un vettore!):
m1
m2
(cos θ + cos 2 θ + 22 − 1)
m1 + m2
m1
F1
F2
90
1,0
120
60
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
0,8
0,6
150
0,4
0,2
0,0
180
30
θ
0
0,2
0,4
0,6
210
330
0,8
240
300
1,0
270
Per riferimento futuro, notiamo che se m1 << m2 , allora: p1 = p0 e l’energia della
particella entrante rimane costante. Ciò avviene perché basta pochissima velocità alla particella 2 per compensare il p trasverso della particella 1, il che corrisponde a pochissima
energia acquisita dalla particella 2.
2
19
Cap. 2 La Dinamica
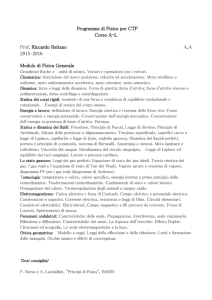
Diagramma polare di
p1 = p1 (θ ) per m1 = 1, 6; m2 = 1; p0 = 1. Notare l’angolo
limite a circa 60°.
p1(θ)
p*(θ)
90
120
1,0
60
0,8
0,6
150
30
0,4
0,2
0,0
θ
180
0
0,2
0,4
0,6
210
330
0,8
1,0
240
300
270
Diagramma polare p1 in funzione di θ. per m1=1 e m2=1,16; p0=1
Il cerchio centrato sullo zero dà
p1 nel centro di massa ( p1* ).
L’esperimento può essere effettuato misurando θ e p1 e verificando che ci sia la dipendenza prevista dalla formula ottenuta. Con un altro po’ di algebra possiamo trovare le altre
dipendenze da θ. In conclusione, si troverà che l’energia cinetica si conserva nella collisione. Si è visto, dunque, che il lavoro fatto trasferisce energia cinetica al punto materiale.
Quest’ultimo acquisisce così, o aumenta, la sua capacità di fare lavoro su di un’altra particella o su di un sistema esterno. L’energia cinetica ha il senso di “capacità del corpo di
compiere del lavoro”. Naturalmente, ci aspettiamo che l’energia di un punto materiale
venga conservata in un senso anche più ampio.
Possiamo riprendere l’equazione p12 − 2
rappresenta
nel
p12x + p12y − 2
20
piano
p1 x , p1 y .
p0 cos θ
m − m1
m1 p1 − p02 2
= 0 e vedere cosa
m1 + m2
m1 + m2
L’equazione
p0
m − m1
m1 p1 x − p02 2
=0
m1 + m2
m1 + m2
può
essere
riscritta:
Cap. 2 – La dinamica
________________________________________________________________________
p0
m , otteniamo un cerchio di raggio
m1 + m2 1
pm
m2
r = p0
= µ v0 , centrato sul punto: OC = ( 0 1 , 0) . Infatti:
m1 + m2
m1 + m2
e, facendo la traslazione
p1 x = p '1 x +
m12
m2 − m1
2m12
p' + p' − p −
+
+
=0
2
2
( m1 + m2 ) m1 + m2 ( m1 + m2 )
m22
⇒ p '12x + p '12 y − p02
=0
( m1 + m2 )2
Questa curva è riportata nei diagrammi polari per i due casi m1 > m2 e m2 > m1 .
2
1x
2
1y
Si noti, che, per
2
0
m1 > m2 , l’espressione sotto la radice quadrata può divenire negativa.
L’angolo per cui questo succede
cos θ = 1 −
m22
si chiama “angolo limite”.
m12
Dalle curve si vede che se :
OC > r o m1 > m 2 : l'origine non è inclusa nel cerchio ⇒ c'è un angolo limite
OC < r o m 2 > m1 : l'origine è inclusa nel cerchio ⇒ nessun angolo limite
Si vede nel diagramma polare corrispondente che il modulo del vettore
p1 raggiunge
infatti un angolo massimo per poi ridiscendere.
Il problema dell’urto tra due particelle può essere affrontato nel sistema del baricentro
delle due masse. In questo caso la quantità di moto totale deve essere nulla e pertanto le
quantità di moto delle due particelle sono uguali e di segno contrario. Partendo dalla velocità iniziale v0 , calcoliamo la velocità v B del baricentro nel sistema in cui la massa m 2
è ferma. Questo riferimento è indicato spesso come “sistema del laboratorio”. Abbiamo:
m1v0
. Pertanto la velocità iniziale della particella 1 nel sistema del baricentro
m1 + m2
m2
v0* = v0 − v B = v0
sarà:
e
l’impulso
iniziale
sarà:
m1 + m2
m1 m2
m1m2
p0* = m1v0* =
v0 = µv0 , in cui la quantità µ =
è chiamata “masm1 + m2
m1 + m2
vB =
sa ridotta” ed è una quantità che ritroveremo quando studieremo i moti centrali nel cap. 4.
Poiché, come detto, p2 = p0 , sarà anche: p2 = µ v0 . Nello stato finale il modulo della
quantità di moto di ciascuna particella rimane lo stesso a causa della conservazione
*
*
*
21
Cap. 2 La Dinamica
dell’energia. La differenza rispetto a ciò che accade nel sistema del laboratorio è che gli
angoli di uscita nel sistema del baricentro saranno θ * , completamente disaccoppiati dal
modulo della quantità di moto, e ϕ = θ * + π .
ϕ
p1*
θ*
p1*
p2*
p2*
1 ( µ v0 )2 1 ( µ v0 )2 1 2
Infine l’energia nel sistema del baricentro sarà: E =
+
= µ v0 ,
2 m1
2 m2
2
che è l’energia di una sola particella di massa uguale alla massa ridotta e velocità v0 . Si
*
può
ritrovare
E* =
la
stessa
espressione
finale
partendo
da
1
1
1
1
m1v1*2 + m2v 2*2 = m1 (v0 − v B )2 + m2 v B2 .
2
2
2
2
Si noti che il cerchio che rappresenta l’urto nel sistema del baricentro ha lo stesso raggio
dell’analogo cerchio del sistema del laboratorio.
Si noti anche che dalla relazione
per
m1 , si ha: p1 x = p *1 x +
v1*x = v1 x − v B = v1 x − v0
m1
, moltiplicando
m1 + m2
p0
m , il che ci consente di identificare il sistema
m1 + m2 1
primato con quello del baricentro. Notare allora che avremmo potuto cominciare dalla
m22
relazione nel baricentro: p * + p * = p
trasformare al sistema del
( m1 + m2 )2
m1
laboratorio ( p *1 x = p1 x − p0
e p *1 y = p1 y ) per ottenere l’equazione:
m1 + m2
2
1x
p12x + p12y − 2
2
1y
2
0
p0
m − m1
m1 p1 x − p02 2
= 0.
m1 + m2
m1 + m2
Seguiamo questo percorso per discutere il caso relativistico. Chiamiamo p * il modulo di
uno degli impulsi nello stato fondamentale. Per
22
p *1 potremo allora scrivere:
Cap. 2 – La dinamica
________________________________________________________________________
2
p *12 x p *1 y
+
= 1 che rappresenta un cerchio nel piano p *1 x , p *1 y . Ricordiamo
p *2
p *2
adesso che la trasformazione di Lorentz ci dà:
Dalla
seconda
( p1 x − γ
p *1 x =
otteniamo:
β
p1 x = γ ( p *1 x +
p1 x
γ
− β cE * .
β
c
E*) e p *1 y = p1 y
Sostituendo,
abbiamo:
E *)2 p 2
1y
c
+
= 1 che è palesemente un ellisse con semiasse maggiore
2
2
p *2
γ p*
a = γ p * e semiasse minore b = p * . L’ellisse ritorna in forma canonica facendo una
traslazione dell’asse
p1 x pari a p '1 x = p1 x − γ
angolo limite a seconda che
β
c
γ
β
c
β
c
E * . Ne segue che ci sarà o meno un
E * sia maggiore o minore di a = γ p * o che sia
m * c 2 < m * v* ⇒ β < β * oppure β > β * . In parole, l’ esistenza dell’angolo
limite dipende dall’essere la velocità del baricentro nel laboratorio più o meno grande
della velocità della particella nel sistema del baricentro. Infine possiamo sostituire
p1x = p1 cos θ e p1 y = p1 sin θ e ottenere:
( p1 cos θ − γ
β
γ 2 p *2
p1 =
c
E*)2
+
p12 sin 2 θ
= 1 la cui soluzione dà:
p *2
βγ E * ± β 2γ 2 E *2 −(1 + γ 2tg 2θ )( β 2γ 2 E *2 −γ 2 c 2 p *2 )
=
c(1 + γ 2tg 2θ ) cos θ
E * 1 ± 1 − (1 + γ 2tg 2θ )(1 − β *2 / β 2 )
=
βγ
c
(1 + γ 2tg 2θ ) cos θ
.
23
Cap. 2 La Dinamica
F1
90
2,5
120
60
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
O r ig in Pr o 8 Ev a lu a tio n
OriginPro 8 Evaluation
2,0
1,5
1,0
0,5
0,0
30
150
180
0
0,5
1,0
210
1,5
330
2,0
240
300
2,5
270
∗
p1 vs θ, caso relativistico: γ=3, β =0,85
Si noti che la precedente discussione è utile anche nel caso di una particella pesante che
decade in due leggere (caso relativistico e non). Il centro di massa in questo caso è il riferimento proprio della particella che decade ed E * è la massa della particella pesante.
Consideriamo una storica applicazione della formula di p1 a titolo di verifica sperimentale.
Nel 1932, J. Chadwick scoprì il neutrone, scoperta per cui ricevette tre anni dopo il premio Nobel. Egli ne misurò la massa in rapporto a quella del protone, facendo incidere un
fascio di neutroni su un bersaglio di idrogeno ( m p = 1 ) prima e di azoto ( m N = 14 ) poi e
notando che la velocità massima dei protoni e dei nuclei di azoto colpiti erano, rispettivamente, v p = 3,3 ⋅ 10 9 cm / s e v N = 4,7 ⋅10 8 cm / s . Dalla formula calcolata precedentemente,
p1 =
p0
( m1 cos θ − m12 cos 2 θ + m22 − m12 ) , si deduce (vedi anche
m1 + m2
grafico polare precedente) che la velocità massima dei bersagli colpiti si ha in una collip0
( m1 − m2 ) ,
sione frontale, quella, cioè, in cui θ = 0 . Per tali collisioni: p1 =
m1 + m2
dove:
p0 = Mv0 è la quantità di moto del neutrone prima della collisione,
p1 = Mv f è la quantità di moto dopo la collisione,
24
Cap. 2 – La dinamica
________________________________________________________________________
m1 = M è la massa incognita del neutrone,
m2 è la massa del bersaglio ovvero m p = 1 o m N = 14 a seconda del caso.
Dalla conservazione della quantità di moto, si ricava che:
M − m2
2m2
2m 2
p2 = m2 v2 = p0 − p1 = p0 − p0
= p0
= Mv0
⇒
M + m2
M + m2
M + m2
⇒ v2 =
2Mv0
che
M + m2
nei
due
casi
dà:
vp =
2 Mv 0
= 3,3 ⋅ 10 9 cm / s
M +1
e
2Mv 0
= 4,7 ⋅10 8 cm / s . Calcoliamo il rapporto membro a membro:
M + 14
3,3 ⋅10 9 cm / s
M + 14
= 7,02 =
, da cui deduciamo: 6,02 M = 14 − 7,02 ⇒ M = 1,16 . In
8
M +1
4,7 ⋅10 cm / s
conclusione, la massa del neutrone risulta del 16% più grande di quella del protone.
Torniamo adesso alla questione della conservazione dell’energia.
Urtando un corpo esteso l’energia cinetica si trasformerà in lavoro di deformazione, ma
anche in calore, che è un’altra forma di energia, come vedremo più avanti. Tuttavia
l’argomento non può ancora dirsi concluso. Prendiamo un piano inclinato, anzi prendiamone due opposti l’uno all’altro.
vN =
α
α
Fig. 11: Rotolamento da un piano inclinato.
Poniamo una pallina in cima al piano inclinato di sinistra. Lasciamola cadere, e noteremo
che essa risale sul piano di destra. In assenza di attrito, la vedremo salire alla stessa altezza
dalla quale è stata lasciata cadere. All’inizio ed alla fine della corsa, la velocità della pallina è nulla: dunque essa non ha energia cinetica. Durante la corsa però la pallina possiede
una certa velocità e dunque una certa energia cinetica: l’energia cinetica viene quindi
creata e distrutta. In generale l’energia cinetica non si conserva: si conserva solo in assenza di forze esterne o durante una collisione. Tuttavia possiamo riflettere un attimo e dirci
che, poiché la pallina si muove sotto l’azione del suo peso, nel momento in cui la pallina
ha velocità nulla, essa ha comunque la potenzialità per riacquistare la sua energia. In effetti appena lasciamo la pallina dalla sommità del piano inclinato essa comincia a rotolare
spontaneamente e acquisisce di nuovo quella energia cinetica che aveva perso salendo.
Cerchiamo dunque di definire una quantità “energia potenziale” che può trasformarsi in
energia cinetica e in cui l’energia cinetica a sua volta si trasforma. L’idea è quella di tro25
Cap. 2 La Dinamica
vare una grandezza, che non sia nulla a velocità zero, che sia dunque dipendente dalla
posizione e non dalla velocità, che si trasformi in energia cinetica quando la velocità aumenta e nella quale l’energia cinetica si trasformi quando la velocità diminuisce.
Possiamo cominciare a calcolare il lavoro che il peso della pallina deve fare per fare scendere
dal
piano
inclinato
la
pallina
stessa:
0
0
h
∫
∫
∫
h
h
0
L = Psenα ds = − mgsenα ds = mg dy = mgh , dove h è la altezza del piano
inclinato3. Possiamo usare allora la quantità mgh come energia potenziale? Dopotutto
essa rappresenta il lavoro fatto a spese dell’energia cinetica della pallina quando questa
1
sale. Consideriamo allora la quantità: H = mgy + mv 2 . In effetti, ad ogni posizione ca2
ratterizzata da una certa altezza y, la quantità H resta costante in valore. Sulla sommità si
avrà infatti che la velocità è nulla e l’altezza è massima, dunque: H = mgh . Mentre la
pallina scende, l’altezza da h si riduce ad un certo valore y. Il peso avrà dunque effettuato
un lavoro pari a mg(h-y), che abbiamo già visto per il secondo principio della dinamica
1
essere pari all’energia cinetica acquisita. Sarà quindi: mg ( h − y ) = mv 2 . Si è dunque
2
1 2
provato che H = mgy + mv si conserva, essendovi solo un cambiamento di energia
2
potenziale in energia cinetica (e viceversa) durante il moto. Naturalmente è possibile imprimere una certa velocità iniziale alla nostra pallina, cambiando così il valore
dell’energia totale al valore che vogliamo.
Si arriva così alla conclusione che l’energia, cioè la somma dell’energia cinetica più quella potenziale, si conserva. L'unità di energia è il Joule (J), che è l’energia acquisita da un
corpo su cui sia stato fatto lavoro da una forza di 1N per la distanza di 1m.
6. Il pendolo cicloidale
Un interessante applicazione della conservazione dell’energia si ha nel particolare pendolo
ideato da Huygens, che è chiamato “pendolo cicloidale” ed ha la caratteristica di avere
oscillazioni isocrone indipendentemente dall’ampiezza di oscillazione.
La “cicloide” è la curva descritta da un punto posto su di una ruota di raggio a che gira
con frequenza angolare ω, rotolando senza scivolare su una retta detta “direttrice” (si veda la fig. 12).
Y
Fig.12: Rotolamento di una ruota su di una
retta direttrice.
v = aωiˆ
3
X
Per una curva qualsiasi si potrà sempre scrivere: dL = mgsenα ds = mgdh , che inte-
grata darà comunque
26
L = mgh .
Cap. 2 – La dinamica
________________________________________________________________________
2,0
1,5
1,0
0,5
0,0
0
2
4
6
8
10
12
Fig 13. Cicloide (a=1)
Il movimento è dunque quello di un punto che si muove su di un cerchio il cui centro si
muove nella direzione dell’asse X con velocità: v x = aω . Pertanto le equazioni orarie del
x = a (θ − senθ )
moto sono:
y = a (1 − cos θ )
prendendo θ = ωt , ed assumendo x = y = 0 al tempo t = 0. Differenziando, si ottiene:
dx = a (1 − cos θ ) dθ
dy
senθ
. Dal rapporto di queste due equazioni si ha:
. Sosti=
dx 1 − cos θ
dy = asenθdθ
y
tuendo nell’equazione precedente: cos θ = 1 − = 1 − z , si ha:
a
dy
1 − (1 − z ) 2
=±
=
dx
(1 − (1 − z )) 2
2− z
=
z
2a − y
che è l’equazione differenziale della cicloide.
y
Questa curva è mostrata in fig. 13. Fig. 14 mostra invece la cicloide inversa che si ottiene
27
Cap. 2 La Dinamica
sostituendo x = a(θ − senθ ) con x = a(θ + senθ ) . Con lo stesso procedimento algebrico4
si trova:
dy
y
=±
. Consideriamo adesso una pallina che si muove sulla parete di
dx
2a − y
una tazza di forma uguale alla cicloide inversa. Arrivata sul fondo della tazza, risalirà verso l’alto e, in assenza di attrito, continuerà ad oscillare salendo da un lato, scendendo, risalendo dall’altro e così via. La caduta lungo la parete di una tazza cicloidale può essere
X con contivista anche come la caduta lungo un piano inclinato, la cui inclinazione varia
nuità secondo una legge data. Come abbiamo visto studiando la conservazione
1
dell’energia, l’energia potenziale è: U = mgy e quella cinetica è: T = mv 2 . Se parte con
2
una certa velocità, la pallina avrà inizialmente una certa energia cinetica che si trasformerà
gradualmente in energia potenziale. Sul fondo della tazza avrà solo energia cinetica ed alla
massima altezza y0 solo energia potenziale. La legge di conservazione dell’energia ci dice
1
allora che: mgy 0 = mgy + mv 2 ⇒ v 2 = 2 g ( y 0 − y ) . È possibile modificare questa
2
eguaglianza in modo da fare apparire esplicitamente l’equazione della cicloide, ovvero
imponendo che la caduta avvenga sulle pareti di una cicloide:
dx
dy
dy
dx
dy
2a − y
dy 2a
.
2 g ( y0 − y ) = v 2 = ( ) 2 + ( ) 2 = ( ) 2 (1 + ( ) 2 ) = ( ) 2 (1 +
) = ( )2
dt
dt
dt
dy
dt
y
dt
y
Fig. 14: Cicloide inversa.
2,0
1,5
y0
1,0
0,5
0,0
0
2
4
6
8
10
A questo punto possiamo separare le variabili, ottenendo:
4
Si ottiene anche cambiando y → − ( y − 2a ) . Sottraendo
curva sull’asse X . Il cambio di segno inverte l’asse Y .
28
2a si porta la sommità della
Cap. 2 – La dinamica
________________________________________________________________________
dy
=
dt
g
a
y( y0 − y ) ⇒
dy
y( y0 − y)
=
g
dt . Possiamo adesso integrare questa equaa
zione tra il tempo zero, al quale la pallina parte dal fondo ed il tempo in cui la pallina raggiunge la massima altezza y0 . Questo tempo sarà un quarto del periodo τ che caratterizza
l’oscillazione della pallina.
y0
∫
0
dy
y ( y0 − y )
=
gτ
a
⇒τ = 4
a 4
g
y0
∫
0
dy
y ( y0 − y )
=4
a
g
1
∫
0
dη
η (1 − η )
, dove η è il rappor-
y
(adimensionale). Come si vede, l’integrale non dipende dalla posizione finale y0, e
y0
dunque dall’ampiezza di oscillazione5. In conclusione: le oscillazioni della nostra pallina
sono isocrone a prescindere dall’ampiezza di oscillazione, a differenza del pendolo semplice per cui l’isocronismo valeva solo per le piccole oscillazioni. Poiché il valore
a
dell’integrale, è π (vedi oltre), il periodo dell’oscillazione sarà: T = 4π
. In effetti si
g
to
può vedere che la soluzione completa è:
dη
η (1 − η )
=
y=
y0 y0
g
− cos( t ) , notando che
2
2
a
d
(arccos(1 − 2η )) . Per realizzare un pendolo cicloidale, Huygens
dη
attaccò un pesetto ad un filo e costruì due “guance” su cui il filo poggiava durante
l’oscillazione. Tali guance erano sagomate in modo tale che la traiettoria del pesetto risultasse appunto cicloidale. La loro forma risulta nuovamente cicloidale. In effetti, si dimostra che il luogo dei centri di curvatura (in questo caso il luogo dei punti d’appoggio del
filo sulle guance,) cioè “l’evoluta” , di una cicloide è una cicloide traslata di metà base
lungo la direttrice e traslata della sua altezza lungo l’asse Y.
5
Si può anche dire che il tempo di caduta lungo la cicloide inversa fino al fondo è indipendente dall’altezza da cui il punto cade. La cicloide è perciò detta “tautocrona”. Si può
anche dimostrare che tra tutte le curve passanti tra due punti a quote diverse la cicloide è
quella lungo la quale il tempo di caduta è il minimo. La cicloide e perciò anche chiamata
“brachistocrona”.
29
Cap. 2 La Dinamica
Fig. 15: Pendolo cicloidale.
L’idea naturalmente era quella di superare le limitazioni del pendolo semplice, che ha un
periodo dipendente dall’ampiezza, pur svanendo tale dipendenza per piccole oscillazioni.
Tuttavia la cosa si dimostrò poco pratica. I pendoli semplici funzionano benissimo, se
l’ampiezza di oscillazione rimane sempre la stessa: se il periodo non è quello teorico, basta apportare una correzione. Lo scarto rispetto al valore teorico può essere infatti misurato e dunque corretto.
Con lo stesso metodo, proviamo adesso a calcolare il periodo di un pendolo semplice la
cui ampiezza di oscillazione non sia piccola. Applichiamo di nuovo la conservazione
dell’energia:
mgy 0 = mgy +
1
dθ
θ
mv 2 ⇒ v 2 = l 2 ( ) 2 = 2 g ( y 0 − y ) = 2 g ( y 0 − l (1 − cos θ )) = 2 g ( y 0 − 2lsen 2 )
2
dt
2
4g
4g
α
θ
α
dθ
( )2 =
(sen 2 − sen 2 ) =
sin 2 (1 −
dt
l
2
2
l
2
sen 2
sen 2
θ
2 ) , dove α è il valore
α
2
θ
massimo di
k=
1
sen
30
α
2
θ . Separando le variabili:
dt =
l
k
g
d( )
2
1 − k sen
2
2
θ
; con
2
. Integrando tra 0 e α , e moltiplicando per quattro, otteniamo il pe-
Cap. 2 – La dinamica
________________________________________________________________________
l
riodo: τ = 4
k
g
α
∫0
θ
d( )
2
1 − k sen
2
2
θ
, che chiaramente dipende dall’ampiezza
2
massima di oscillazione. L’integrale, il cui valore evidentemente dipende dal valore dell’ampiezza di oscillazione α, è noto come integrale ellittico del primo genere ed esistono tavole dei suoi valori in funzione di α. Vedere, per esempio, le
Standard Mathematical Tables, CRC Press. Per vari valori di α riportiamo i valori dell’integrale e di 4 volte l’integrale (ovvero: T
g
):
l
10°
20°
30°
40° 50° 60°
70°
80°
90°
α
Integrale 1,5738 1,5828 1,5981 1,62 1,649 1,6858 1,7312 1,7868 1,8541
4xI
6,2952 6,3312 6,3924 6,48 6,596 6,7432 6,9248 7,1472 7,4164
Ricordiamo anche che il valore di 4 xI = T
6,2832. Quel che segue è un grafico di T
g
per piccole α, è 2π, ovvero
l
g
in funzione di α.
l
7,6
7,4
7,2
4*I
7,0
6,8
6,6
6,4
6,2
0
20
40
60
80
100
α in gradi
31
Cap. 2 La Dinamica
Nel caso in cui θ e quindi α siano piccoli, allora si può approssimare la precedente
l
espressione a: τ = 4
g
1
∫
0
dx
1− x
x=
, dove
2
θ
. Ponendo
α
x = senβ , abbiamo:
π
2
τ =4
l
dβ = 2π
g
∫
0
l
, che è l’espressione trovata precedentemente. Integrando fino ad
g
un angolo generico θ , per θ piccolo e, riutilizzando le sostituzioni precedenti, si trova
invece:
t=
l
k
g
θ
∫0
θ
d( )
2
1 − k 2 sen 2
θ
≅
l
g
x
∫0
dx
1− x
2
=
l
β=
g
l
θ
g
arcsen ⇒ θ = α sen
t
α
g
l
2
che è la formula trovata precedentemente usando il secondo principio della dinamica.
Vogliamo notare che nei tre casi del peso che cade su un piano inclinato, del pendolo
semplice e del pendolo cicloidale, si tratta sempre di punti materiali costretti a muoversi
lungo una data curva: un segmento nel caso del piano inclinato, un arco di cerchio nel
caso del pendolo semplice e un pezzo di cicloide nel caso di un pendolo cicloidale. Dunque possiamo generalizzare questo tipo di problema, immaginando un punto materiale
vincolato a muoversi (senza attrito) lungo una curva piana y = f ( x ) . In questo caso
l’energia, conservata se il potenziale V ( x, y ) è conservativo (vedi oltre), sarà:
1
1
df
m( xɺ 2 + yɺ 2 ) + V ( x, y ) ⇒ H = mxɺ 2 1 + ) 2 + V ( x, f ( x)) , che, nota la f ( x ) ,
2
2
dx
dipende solo da x e che può essere risolta per separazione delle variabili:
H=
2
H − V ( x, f ( x))
1
= xɺ 2 ⇒
m
df 2
1 + dx )
dx
H − V ( x, f ( x))
1
2
df
m
2
1 + dx )
= dt .
Notiamo pure che nel caso del pendolo semplice, abbiamo usato come variabile un angolo
che non è una coordinata nel senso che abbiamo dato a questa parola nel capitolo precedente, è, tuttavia, una coordinata in un senso generalizzato.
Consideriamo un sistema di N particelle di massa m i , con i = 1,..., N e le cui coordinate
cartesiane siano ri . Supponiamo che esse siano soggette a dei vincoli “olonomi”, cioè
espressi da equazioni del tipo: f j (r1 ,..., rN , t ) = 0 per j = 1,..., M < 3N . Si potranno allora definire un numero di coordinate generalizzate (indipendenti), pari al numero di “gradi
di libertà” n = 3N − M , indicate con i simboli q i , i = 1,..., n . Insisto che le coordinate
generalizzate potrebbero non essere coordinate vere è proprie, ma, per esempio, angoli.
32
Cap. 2 – La dinamica
________________________________________________________________________
Possiamo prendere il pendolo semplice come facile esempio. Il punto materiale appeso al
filo inestensibile di lunghezza l, ha tre coordinate cartesiana x, y, z, che si riducono immediatamente a due (x, y), se vincoliamo il punto a oscillare su un piano (equazione del vincolo: z = 0 ). Se poi notiamo che il filo è vincolato (vincolo indipendente dal tempo o
“scleronomo”) in un punto (diciamo l’origine, per semplicità) e che per conseguenza le
coordinate x e y sono correlate (equazione del vincolo: x 2 + y 2 − l 2 = 0 ), ne deduciamo
facilmente che esiste una sola coordinata generalizzata: l’angolo θ=q1.
Si possono esprimere le r j = r j (q1 ,..., q n , t ) e le rɺ = v j = v j (q1 ,..., qn , qɺ1 ,...qɺn , t ) =
=
∂rɺj
∂r j
∑ ∂q qɺ + ∂t
l
l
in funzione delle coordinate generalizzate e delle loro derivate tempo-
l
rali.
Nell’esempio del pendolo, si ha: r = lsenθi + l cos θj = lsenq1i + l cos q1 j , mentre la velocità sarà: v =
ph =
∂y
∂r
∂r ɺ
∂x
qɺ1 =
θ =( i +
j )θɺ = l (cos θi − senθj )θɺ . Infine le quantità
∂q1
∂θ
∂θ
∂θ
∂H
, in cui H è l’energia totale del sistema, sono chiamate momenti coniugati. E’
∂qɺh
facile vedere che, per una particella libera per cui H = T =
1 2
∂H
mv , si ha: ph =
= mv
2
∂qɺh
che è la ben nota “quantità di moto” della particel
Per finire vogliamo ricordare come è fatto un orologio. Si tratta di un meccanismo cui
viene fornita energia da un peso che cade o da una molla caricata e che fa muovere delle
lancette su un quadrante. Caricata la molla, le lancette girerebbero fino a scaricare la molla o fino alla caduta del peso, se non fosse per un meccanismo, noto sicuramente già nel
trecento e forse molto prima, chiamato “scappamento”. Lo scappamento blocca il moto
degli ingranaggi frapponendo un dente in uno di essi e rilasciandolo di un dente ad ogni
oscillazione di un opportuno oscillatore (pendolo, bilanciere, ecc...). Il ticchettio
dell’orologio meccanico viene appunto dal battere del dente dell’ingranaggio contro il
dente dello scappamento. Ogni volta che lo scappamento urta contro l’ingranaggio ne riceve un po’ di energia che serve a tenere il pendolo in oscillazione. Se il pendolo ha un
periodo, poniamo, di un secondo, ad ogni scatto dello scappamento una lancetta gira di
1 / 60 ⋅ 360 0 = 6 0 , così che dopo un minuto avrà completato un giro completo. Opportunamente demoltiplicata una seconda lancetta si muoverà di 60 ogni sessanta scatti dello
scappamento e una terza completerà un giro dopo 12 giri completi della seconda. Quindi,
tutto ciò che le lancette fanno è contare quante oscillazioni il pendolo ha compiute, traducendo questo numero nei familiari secondi, minuti e ore. Chiaramente, se invece di un
oscillatore meccanico utilizziamo un oscillatore elettronico o di altro tipo e contiamo le
sue oscillazioni, stiamo costruendo un orologio più sofisticato tecnologicamente, ma non
diverso concettualmente
33
Cap. 2 La Dinamica
34
Cap. 2 – La dinamica
________________________________________________________________________
7.
Il momento della quantità di moto
Il momento della quantità di moto è la quantità: L = r × p , dove r è la distanza del punto
materiale
dall’origine.
Per
una
particella
isolata
L
è
conservata:
d
dr
dp
L=
× p+r×
= 0 . Il primo termine è nullo perché prodotto vettore di due vettodt
dt
dt
ri paralleli. Il secondo termine è nullo perché la quantità di moto è conservata. Per un sistema di particelle possiamo definire il momento totale della quantità di moto:
dr
dp
dL
L = ∑ ri × mi vi , che è anch’ esso conservato. Infatti:
=
( i × pi + ri × i ) = 0 .
dt
dt
dt
i
i
∑
Il primo termine è zero per la stessa ragione di prima. Usando il secondo principio della
dp
dL
dinamica, si ha poi:
=
(ri × i ) =
ri × Fi . La forza agente sulla iesima particeldt
dt
i
i
∑
∑
la è la somma di tutte quelle dovute alle altre particelle: Fi =
∑F
ij
. Sostituendo:
j ≠i
dL
=
dt
∑ r × F = ∑ r × ∑ F =∑ r × F
i
i
i
i
i
ij
j ≠i
i
ij
. Poiché, a causa del terzo principio della
ji
dinamica, Fij = − F ji , possiamo scrivere:
dL
=
dt
∑ (r − r ) × F
i
j
ij
. Ma è facile vedere che:
j <i
(ri − r j ) × Fij = 0 = (ri senθ − r j senα ) Fij come mostrato in fig. 176.
ri sin θ = r j sin a
θ
Fij
α
F ji
Fig. 17: (ri − r j ) × Fij = 0 = (ri senθ − r j senα ) Fij
6
Da tutto ciò si deduce che la conservazione del momento della quantità di moto sia una
conseguenza del terzo principio della dinamica e non un principio indipendente. Tuttavia
vogliamo notare che nella figura in alto le due forze sono state prese non solo di modulo
uguale e verso opposto, ma anche con la direzione sulla congiungente i due punti. Se i due
vettori fossero stati presi paralleli, ma secondo una direzione diversa dalla congiungente i
punti, allora la conservazione del momento della quantità di moto non sarebbe più vera.
Possiamo allora dire che la conservazione di L aggiunge appunto che le due forze devono
avere come retta d’zione la congiungente i due punti. Ciò che è vero per le forze gravitazionali, elettriche ed elastiche.
35
Cap. 2 La Dinamica
Esistono diverse dimostrazioni sperimentali e diverse applicazioni basate sulla conservazione del momento della quantità di moto. Una di queste è rappresentata dalle ruote di
bicicletta. È facile andare in bicicletta, finché le ruote girano, ma è molto più complicato
tenersi in equilibrio da fermi. Evidentemente in marcia, il momento della quantità di moto
delle ruote, impedisce alle stesse di inclinarsi lateralmente.
Ricordiamo che la conservazione del momento della quantità di moto significa anche la
conservazione della direzione del vettore, che, nel caso delle ruote di bicicletta, è orizzontale, allineato con l’asse della ruota. Un’altra applicazione è costituita dai giroscopi. Un
giroscopio è una ruota che gira a gran velocità sul suo asse. La direzione dell’asse tende a
mantenersi e può indicare così una direzione fissa, per esempio il Nord. Comunque
l’applicazione più familiare è sicuramente la trottola.
Anche qui abbiamo un corpo rotante attorno ad un’asse verticale. E poiché questo tende a
mantenere la sua direzione, la trottola riesce a tenersi verticale anche poggiando su una
punta molto sottile.
8.
La dinamica del corpo rigido
Dato un sistema di punti materiali, l’insieme delle forze applicate ammette sempre una
risultante. Abbiamo già visto come il baricentro di un sistema discontinuo di punti si
muove sotto l’effetto di un insieme di forze esterne applicate: il baricentro si muove di
quel moto generato dalla risultante delle forze esterne e tutta la massa del corpo si può
pensare come concentrata nel baricentro stesso. Se consideriamo un corpo rigido come un
insieme continuo di punti materiali con relazioni spaziali reciproche (determinate dalle
forze interne) ben definite e costanti, indipendentemente dalle forze esterne applicate,
allora il moto dell’intero corpo deve seguire il baricentro la cui relazione spaziale rispetto
ad ogni punto del corpo rimane costante per l’ipotesi di rigidità del corpo. Pensiamo
all’esempio di una sfera spinta da una forza costante, per esempio la gravità. Il baricentro
cade come se tutta la massa fosse concentrata al centro della sfera (anche nel caso di una
sfera cava, cioè quando il baricentro non è sul corpo). Tuttavia, un insieme di forze esterne applicate ad un corpo rigido non produce in generale solo un movimento del centro di
massa. Pensiamo ad una palla da biliardo spinta sul piano del biliardo. A causa della spinta data dalla stecca e dell’attrito sul panno verde, la palla ruota intorno ad un qualche asse.
Dunque un insieme di forze esterne applicate produce anche una rotazione del corpo intorno ad un suo asse. Cominciamo col definire come “momento” di una forza F applicata
in un punto Q rispetto ad un altro punto P (per esempio, l’origine delle coordinate) il pro→
dotto vettoriale: M = r × F , dove r = QP . Possiamo definire “coppia”, un insieme di due
forze F e − F di eguale modulo, applicate in punti diversi del corpo con direzioni uguali
e verso opposto. Il momento di una coppia è dato dal prodotto vettoriale:
→
→
→
M = Q1 P × F − Q 2 P × F = Q1Q 2 × F , che, come si vede, è indipendente dal punto prescelto P.
Q1
36
−F
Fig.18: Coppia di forze.
P
F
Q2
Cap. 2 – La dinamica
________________________________________________________________________
Pur ammettendo una risultante nulla, una coppia non è affatto equivalente ad una forza
nulla: l’effetto di una coppia di forze sarà infatti quello di far ruotare un corpo intorno ad
un asse perpendicolare al piano formato dalle direzioni delle due forze applicate.
In conclusione: dato un sistema materiale rigido, abbiamo che l’effetto di un sistema di
forze esterne è quello di accelerare il centro di massa del sistema (effetto della risultante)
e di produrre una rotazione del sistema attorno ad un asse (effetto delle coppie).
Come abbiamo detto, un corpo rigido è un insieme continuo di punti la cui distanza relativa rimane costante. In effetti un corpo solido può essere più o meno identificato come un
corpo rigido, se non è plastico come, per esempio, della plastilina. Ci interessa studiare un
corpo rigido prima di tutto perché quasi tutti gli oggetti meccanici sono corpi più o meno
rigidi, ma anche perché nel definire le leggi della meccanica, dobbiamo di necessità usare
dei corpi rigidi ed è per essi che stabiliamo risultati sperimentali. L’estrapolazione ai punti
materiali deve poi essere coerente con i risultati che troviamo per un corpo rigido. Un corpo tridimensionale è una distribuzione continua di materia per la quale possiamo misurare
una quantità di materia dm per ogni volumetto dV, centrato intorno alle coordinate x, y, z,
dm
e dunque una “densità” di massa ρ ( x, y , z ) =
. La massa totale sarà:
dV
∫
M = ρ ( x, y, z )dV . Se il corpo è rigido, la sua forma è mantenuta dalle forze interne
V
anche quando il corpo stesso è soggetto a forze esterne. Per un corpo continuo, possiamo
definire un centro di massa o baricentro, esattamente come per un sistema discontinuo di
punti. In questo caso, la definizione già data di baricentro viene ad assumere la forma:
∫ ρ ( x, y, z)qdV ∫ qdm
Q=
V
∫
ρ ( x, y , z )dV
=
V
M
, dove q è il vettore posizione del punto di coordinate x, y,
V
∫
z. La quantità di moto totale del corpo rigido, sarà allora: P = dm
V
dq
dQ
=M
= MV .
dt
dt
La quantità di moto totale del corpo è quindi quella di un punto materiale di massa pari
alla massa del corpo che si muove con la velocità del baricentro del corpo.
Denotate con dFint ( x, y, z ) e dFest ( x, y, z ) , rispettivamente le forze interne ed esterne
agenti
sui
volumetti
infinitesimi
di
coordinate
q = ( x, y, z ) ,
abbiamo
che
37
Cap. 2 La Dinamica
∫ dF
int
( x, y, z ) = 0 per il terzo principio della dinamica, mentre la risultante R delle forze
V
∫
esterna sarà in generale diversa da zero: R = dFest ( x, y, z ) .
V
Generalizzando il risultato ottenuto nel par. 4, se il sistema è isolato, il baricentro del sistema si muove di moto rettilineo uniforme. Se il sistema è invece soggetto a forze esterne
distribuite secondo dFest ( x, y, z ) , si ha:
∫
∫
V
V
R = dFest ( x, y, z ) = dm
d 2q
dt
2
=
d
dt
dq
dP
∫ dm dt = dt
=M
V
dV
. È naturalmente possibile
dt
che, pur non essendo nulle le forze esterne, lo sia la loro risultante. In tal caso il corpo si
muoverà di moto rettilineo uniforme malgrado l’esistenza di forze esterne.
Per le stesse ragioni che abbiamo esaminato nel par. 7, il momento delle forze interne è
globalmente nullo:
∫ r × dF
int ( x,
y , z ) = 0 , ma non è così, in generale, per le forze esterne;
V
∫
dunque esiste un loro momento totale M = r × dFest ( x, y, z ) ≠ 0 . È facile allora vedere
V
che il momento delle forze esterne è pari alla derivata rispetto al tempo del momento della
∫
quantità di moto del sistema L = r × dp . Infatti:
V
∫
∫
V
V
M = r × dFest ( x , y , z ) = r × dm
d 2q
dt 2
=
. Per quanto riguarda il secondo integrale,
d
dt
∫
V
dq
dr
dq
d
dL
∫ r × dm dt − ∫ dt × dt dm = dt ∫ r × dp = dt
V
V
V
dr dq
×
, esso è uguale a zero perché, se abdt dt
biamo scelto l’origine come il punto rispetto al quale calcolare il momento della forze,
allora r = q ed il prodotto vettore di un vettore per se stesso è nullo. Se il punto P rispetto
al quale si calcolano i momenti è diverso dall’origine (vedi fig. 19), allora possiamo scri→
→
dr dq d OP dq
=
−
=
, in quanto il vettore OP è codt dt
dt
dt
stante, sotto l’ipotesi che il corpo sia rigido.
→
vere che: r = q − OP . In tal caso:
q
O
→
r
OP
P
Fig. 19: Momento di una forza calcolato rispetto ad un punto P diverso
dall’origine O.
38
Cap. 2 – La dinamica
________________________________________________________________________
In conclusione, l’insieme delle forze esterne applicate ad un corpo rigido in un punto diverso dall’origine, può essere rappresentato da una forza risultante che accelera il baricentro del corpo, e da una coppia di forze il cui momento produce una variazione del momento della quantità di moto.
dP
dt
dL
M =
dt
•
R=
•
Per un corpo rigido che ruota intorno ad un asse (Z) orientato, di versore k , possiamo
riscrivere il momento della quantità di moto in una forma che si rivelerà estremamente
utile:
∫
→
∫
→
∫
∫
∫
∫
V
V
V
V
L = OP× dp = OZ × dp + r × dp = r × dmv = ρr × ωrdV = ( ρr 2 dV )ωk =
V
V
= Iωk = Iω
→
Dove si è fatto uso del fatto che:
∫ OZ × dp = 0 . Se questa quantità non fosse nulla, L
non
V
risulterebbe allineato con l’asse Z come supposto. Si è sostituito v = rω , con v ed r perpendicolari, ed abbiamo definito il “momento d’inerzia” I del corpo rispetto all’asse:
∫
I = ρ ( x, y , z )r 2 dV . Si è anche definita la velocità angolare come un vettore di modulo
V
ω=
dθ
, in direzione dell’asse Z, con verso positivo, se la rotazione è antioraria.
dt
Z
Z
O
r
→
P
v
Fig. 20: Corpo rigido in rotazione intorno all’asse Z.
39
Cap. 2 La Dinamica
Consideriamo adesso il caso di un pendolo, costituito da un corpo pesante appeso ad un
punto, intorno al quale può oscillare senza attrito. Indichiamo con I il momento d’inerzia
rispetto al punto di sospensione O e con B la posizione del baricentro. Consideriamo la
forza peso P , applicata nel baricentro.
O
θ
r
B
P
.
Fig. 21: Pendolo costituito da un corpo rigido
Il momento della forza peso rispetto al centro di sospensione è: M = −rPsenθ ≈ − rPθ ,
dove l’ultimo passaggio è giustificato nel caso di piccole oscillazioni. Applicando la seconda delle formule per il corpo rigido, si ha: rPθ = − I
dω
d 2θ
d 2θ
= − I 2 ⇒ 2 + ω02θ ,
dt
dt
dt
rP
. Questa equazione è esattamente quella del pendolo
I
semplice (o dell’oscillatore armonico). Lasciamo allo studioso lettore il compito di mostrare che, se il corpo si riduce ad un punto lasciato oscillare appeso ad un filo inestensibile, cioè si riduce ad un pendolo semplice, allora la formula appena trovata coincide con
quella del pendolo semplice. Come esempio di calcolo del momento d’inerzia, prendiamo
il caso di una sfera di densità costante ρ, massa totale M e raggio R. In questo caso:
dove abbiamo posto: ω0 =
∫
R r
I = ρx dV = ρ
2
40
2πxdxdz = 2πρ
−R 0
V
= 2πρ
∫∫x
R
2
R5
4
π
∫
0
sen 5θdθ = 2πρ
∫
−R
0
( Rsenθ ) 4
r4
dz = 2πρ
(− Rsenθ )dθ =
4
4
∫
π
R 5 16 2 4 3
2
= ( πR ρ ) R 2 = MR 2
4 15 5 3
5
Cap. 2 – La dinamica
________________________________________________________________________
Dove si è posto: dV = 2πxdxdz ; z = R cosθ e r = Rsenθ e, nell’ultimo passaggio,
4
M = πR 3 ρ
3
π
∫
π
∫
sen 5θdθ = sen 4θd (− cos θ ) = sen 4θ (− cos θZ )
0
π
0
π
∫
+ 4 sen 3θ cos 2 θdθ =
0
0
r
θ
R
Fig. 22: Calcolo del momento di inerzia per una sfera.
π
π
π
π
π
4
16
.
= 4 sen θ (1 − sen θ )dθ = 4 sen θdθ − 4 sen θdθ ⇒ sen θdθ =
sen 3θdθ =
5
15
∫
3
∫
2
0
∫
3
0
π
Infatti:
3
0
∫
0
π
∫ sen θdθ = ∫ senθ (1 − cos
5
0
π
2
5
∫
∫
0
π
∫
θ )dθ = senθdθ + cos 2 θd (cos θ ) = 2 −
0
0
0
2 4
=
3 3
Possiamo rifare lo stesso calcolo per una sfera cava molto sottile, alla quale attribuiamo
dm
un raggio fisso pari ad R ed una densità superficiale σ =
. La superficie di un anello
dS
(come mostrato in fig. 22), sarà pari a: dS = 2πrRdθ . Moltiplicando per la densità superficiale ed il raggio al quadrato, e, tenendo conto che r = Rsenθ , si ha:
π
∫
π
∫
I = 2πr 3 Rσdθ = 2πσR 4 senθ 3 dθ =
0
9.
0
2
2
(4πR 2σ ) R 2 = MR 2
3
3
La dinamica relativistica
Dobbiamo a questo punto trovare una generalizzazione della dinamica classica che possa
essere coerente con la cinematica relativistica illustrata nel primo capitolo. Cerchiamo
dunque una generalizzazione del secondo principio della dinamica F = ma che:
•
•
Si riduca alla formulazione classica nel limite di velocità piccole rispetto alla velocità
della luce.
Sia invariante rispetto alla trasformazione di Lorentz, mantenga cioè la sua forma
passando da un sistema di riferimento ad un altro.
41
Cap. 2 La Dinamica
Abbiamo visto che la velocità definita classicamente non si trasforma come le coordinate,
non è cioè un vettore di Lorentz o quadri-vettore. Nel formulare la dinamica relativistica,
conviene però usare dei quadri-vettori, perché qualunque equazione del tipo a = b con a e
b quadri-vettori sarà automaticamente invariante sotto una trasformazione di Lorentz, dato
che entrambi i membri vengono trasformati allo stesso modo, i due termini cioè covariano e la legge è detta covariante. Nel fare questo seguiamo solo quello che è vero per
il secondo principio in dinamica classica: la sua forma rimane invariante rispetto a rotazioni, traslazioni e trasformazioni galileiane, ovvero è covariante rispetto a queste trasformazioni. Vogliamo adesso trovare una relazione a = b che sia invariante sotto rotazioni, traslazioni e trasformazioni di Lorentz. Purtroppo, nel caso classico, come in quello
relativistico la legge della fisica non è valida nei sistemi non inerziali. Occorre passare
alla relatività generale per avere una formulazione della dinamica che sia covariante in
tutti i sistemi. Dimostriamo esplicitamente che il secondo principio delle dinamica è invariante sotto una rotazione attorno all’asse Z, applicando le regole delle trasformazioni che
abbiamo scritte nel capitolo precedente.
Fx = ma x = Fx' cos θ − F y' senθ = m(a x' cos θ − a 'y senθ )
F = ma ⇒ F y = ma y = Fx' senθ + F y' cos θ = m(a x' senθ + a 'y cos θ )
'
'
Fz = ma z = Fz = ma z
Il sistema di due equazioni lineari nelle variabili primate ha come soluzione: F ' = ma ' .
Dunque la forma del secondo principio della dinamica è conservata in una rotazione.
Analogamente si può dimostrare che, se a = b , con a e b quadrivettori di Lorentz, allora è
anche vero che a ' = b' , con a’ e b’ i trasformati di Lorentz di a e b. Dunque la forma di
una legge rimane invariante.
Possiamo cominciare dunque col trovare la forma di una velocità relativistica, generalizzazione di quella classica, che sia un vettore di Lorentz, cioè si trasformi come le coordinate o i loro differenziali sotto la trasformazione di Lorentz. Presumibilmente il problema
con la definizione classica della velocità sta nel fatto che abbiamo usato come parametro
invariante rispetto alla trasformazione il tempo. Il tempo però, come abbiamo visto, non è
uno scalare di Lorentz, dovremo sostituirlo pertanto con uno scalare di Lorentz. Possiamo
provare a risolvere il problema usando l’elemento di lunghezza ds dello spazio di Minkowski, che, come abbiamo visto nel par. 13 del precedente capitolo, è appunto uno scalare.
Dunque con questa ipotesi esiste un vettore velocità a quattro componenti, definito come:
dx
u i = i , i = 1,...,4 .
ds
•
42
Evidentemente le u i trasformano come i differenziali dxi e dunque costituiscono un
quadri-vettore, essendo ds uno scalare di Lorentz.
Cap. 2 – La dinamica
________________________________________________________________________
•
Denotando con un indice 0 le quantità nel sistema proprio del punto materiale, abγv x
u1 = c
γv y
cdt
2
2
biamo: ds = (cdt0 ) ⇒ ds = cdt 0 =
e dunque: u 2 =
,
c
γ
γv z
u 3 =
c
con v x , v y , v z componenti della velocità classica.
•
La quarta componente della velocità (u 4 ) è γ .
•
La quantità: u 2 = u 42 − (u12 + u 22 + u 32 ) =
•
1
ds 2
(dx 42 − dx12 − dx 22 − dx 32 ) = 1 è uno scala-
re di Lorentz.
La nuova velocità è adimensionale. Per avere le dimensioni di una velocità, moltiplidx
chiamo tutto per c e ridefiniamo la velocità come: u i = c i . Avremo allora:
ds
u 4 = cγ e u 2 = c 2 . Denotiamo con u il trivettore
•
(u1 , u2 , u3 ) = γ v .
Evidentemente per β → 0 , u → v cioè u tende alla velocità classica. Pertanto, u
soddisfa il primo criterio imposto all’inizio di questo paragrafo.
Possiamo anche definire una quantità del moto a quattro dimensioni, il quadri-impulso,
moltiplicando la velocità quadri-dimensionale per la massa: p i = cm 0 u i , i = 1...4 , che trasformerà come la quadri-velocità. Notiamo che il quadri-impulso ha le dimensioni di
un’energia. Altre proprietà del quadri-impulso sono:
• Le prime tre componenti del quadri-impulso sono correlate alle componenti classiche
della quantità di moto dalle relazioni:
•
p1 = m 0 γcv x = γcp x
p 2 = m 0 γcv y = γcp y
p 3 = m 0 γcv z = γcp z
Possiamo anche ridefinire la massa come m = γm 0 , dove m0 viene allora chiamata la
p1 = cp x
“massa a riposo”. Avremo allora: p 2 = cp y . Secondo queste relazioni, le prime tre
p3 = cp z
componenti del quadri-impulso sono identiche alle componenti classiche, moltiplicate
per c, tenendo però presente che la massa non è più costante in funzione della velocità
a causa del fattore γ. Denotiamo con p il trivettore ( p x , p y , p z ) e avremo che:
cp = ( p1 , p2 , p3 )
43
Cap. 2 La Dinamica
•
La quarta componente è p 4 = m0 γc 2 = mc 2 , cioè la massa moltiplicata per c 2 .
•
Evidentemente:
p 2 = p42 − ( p12 + p22 + p32 ) = m2c 4 − c 2p 2 = m02γ 2c 2 (c 2 − v 2 ) = m02γ 2c 4 (1 − β 2 ) = m02 c 4
è uno
scalare di Lorentz. Dalla relazione precedente ricaviamo anche:
mc = (m02c 4 + c 2p 2 )1/2 .
2
Vediamo adesso come riscrivere la variazione
una forza compie del lavoro:
dE d’energia di una particella sulla quale
dE = F ⋅ vdt = dp ⋅ v = m0 d (γ v) v = m0 (v 2 d γ + γ vdv) =
= m0 c 2 ( β 2
β
(1 − β )
2
3
dβ +
2
1− β 2
(1 − β )
2
3
β dβ ) = m 0 c 2 βγ 3 dβ = m 0 c 2 dγ = d (mc 2 ) .
2
Dopo un tempo finito, la variazione complessiva di energia sarà pari a:
∆E = mc 2 − m0 c 2 . Poiché il lavoro fatto dalla forza avrà fatto variare l’energia cinetica
da zero (supponiamo il punto inizialmente fermo) a T, avremo: T = mc 2 − m0c 2 . Che possiamo interpretare come segue:
1.
A riposo la particella non ha energia cinetica (T = 0) , ma il termine m0 c 2 non va a
zero neppure se la velocità è nulla. Dunque la massa è equivalente all’energia. La
massa a riposo contribuisce all’energia con il termine m0 c 2 .
2.
L’energia totale è la somma dell’energia della massa a riposo m0 c 2 e dell’energia
cinetica T . L’energia totale della particella è dunque: E = mc .
2
•
Notiamo esplicitamente che questo risultato consegue dall’aver inserito la massa, e
non la massa a riposo, nell’espressione di p . Da tutto quanto detto sopra, è facile vedere che l’impulso e l’energia si trasformano da un riferimento all’altro nel modo seguente:
E = γ ( E '− β cp 'x )
.
px = γ ( p 'x − β E ')
Possiamo ora dimostrare che il termine: ∆H = mc 2 − m 0 c 2 ≈ 12 m 0 v 2 , facendo uno sviluppo in serie di Mc Laurent. Questo, naturalmente, contribuisce all’interpretazione precedente.
mc 2 = f ( β ) = f (0) + f ' (0) β + f ' ' (0)
44
β2
2!
+ ... = m0 c 2 + 12 m0 c 2 β 2 = m0 c 2 + 12 m0 v 2
Cap. 2 – La dinamica
________________________________________________________________________
Naturalmente l’equivalenza massa-energia è un risultato sorprendente, totalmente al di
fuori della meccanica Newtoniana. Questa equivalenza può però essere verificata sperimentalmente.
Un esempio importante viene dalla fisica nucleare. Come è noto, l’atomo è formato da un
nucleo al suo interno e da particelle negative chiamate elettroni, più esterne. Nel Cap. 4
esamineremo l’esperimento che ha confermato questo modello. All’interno del nucleo, ci
sono due tipi di particelle: i protoni, con carica positiva, ed i neutroni con carica nulla. Se
la massa dei protoni è m p e quella dei neutroni è mn , avremo per la massa totale del nucleo: M T = Zm p + ( A − Z )m n , dove Z è il numero atomico (pari al numero di protoni nel
nucleo) ed A il peso atomico (numero di protoni + numero di neutroni nel nucleo). Infatti,
la massa degli elettroni è trascurabile, mentre la massa dei protoni liberi può essere misurata come può essere misurata quella dei neutroni liberi (che è circa uguale a quella dei
protoni).
Le diverse specie atomiche hanno in effetti diversi isotopi: atomi identici, ma con un diverso numero di neutroni; stesso Z dunque, ma diverso A. Possiamo effettuare una verifica
utilizzando gli spettrometri di massa, apparecchi che saranno descritti nel capitolo 4. Dunque possiamo prevedere la massa di ogni isotopo, essendo noti A, Z, e la massa di neutroni e protoni. Tuttavia, una volta misurata la massa atomica, si è scoperto che la massa teorica totale calcolata con la formula scritta precedentemente, risultava maggiore di quella
effettivamente misurata. Alla differenza tra massa teorica e massa misurata si dette il nome di “difetto di massa” ∆M . Il difetto di massa per nucleone (cioè ∆M / A) assume un
valore approssimativamente costante di 8 MeV per i nuclei con Z>20. L’unità MeV è una
misura di massa (o di energia, vista la loro equivalenza), che definiremo nel prossimo capitolo. Orbene, questo difetto di massa rappresenta l’energia che occorre fornire a protoni
e neutroni – collettivamente chiamati nucleoni – per liberarli dal nucleo. È appunto questa
energia che viene liberata durante certe reazioni nucleari, reazioni che hanno come effetto
la “risistemazione” dei nucleoni di un nucleo, a formare nuovi nuclei di Z diverso, raggiungendo una configurazione complessiva di più bassa energia e liberando così l’eccesso
di energia sotto forma di calore. Queste reazioni sono alla base della cosiddetta energia
nucleare (spesso chiamata erroneamente “atomica”).
C’è inoltre un esperimento concettuale che serve a capire come all’energia vada associata
una massa inerziale. Consideriamo una scatola, un parallelepipedo di altezza l sulle cui
base interne fissiamo due apparecchi emettitori/assorbitori (I e II) di luce perfettamente
uguali, in particolare con la stessa massa. La massa totale sia M . L’emettitore di sinistra
emette verso l’assorbitore di destra un quanto di luce con energia E , cui corrisponde una
I
E
II
v
l
45
Cap. 2 La Dinamica
E7
. A seguito di questa emissione, la scatola dovrà cominciare a
c
E
, se vogliamo rispettare la conservazione
muoversi verso sinistra, con velocità: v =
Mc
E
della quantità di moto ( Mv − = 0 ). Poiché il moto del quanto di luce dura un tempo
c
l
t = , prima che esso venga assorbito da II, la scatola si sarà spostata a sinistra complesc
El
sivamente di x = vt =
.
Mc 2
Sosteniamo che, a seguito dell’assorbimento di questo quanto, la massa dell’assorbitore II
aumenta di m e quella dell’emettitore I diminuisce di m . Supponiamo, infatti per assurdo
che le due masse inerziali rimangano le stesse dopo l’emissione/assorbimento, la configurazione sarà allora identica a quella iniziale a parte lo spostamento complessivo della scatola a sinistra di x, in aperta violazione del terzo principio della dinamica. Se tuttavia
l’emissione/assorbimento del quanto di luce è corrisposto alle variazioni di massa m di I e
di II, allora, la scatola si sarà spostata verso sinistra, ma il baricentro del sistema sarà nella
Mx E
= 2 . Come si vede, la massa
posizione originale se: Mx − ml = 0 , cioè se: m =
l
c
quantità di moto p =
inerziale totale spostata da sinistra a destra durante l’emissione del fotone è: m =
E
. Per
c2
concludere questo argomento, proponiamo a questo punto di riscrivere il secondo princidp
pio della dinamica nella forma: Fi = i , i = 1,2,3 ,4. Evidentemente abbiamo una relaziods
ne invariante rispetto ad una trasformazione di Lorentz. Consideriamo le prime tre componenti di questa relazione (con F denotiamo il vettore della forza classica):
dv
dβ
dp
dp
d ( vγ )
+ m 0 vγ 4 β
.
Evidentemente,
quando
=γ
= m0γ
= m0γ 2
γF = c
dt
dt
ds
dt
dt
β → 0 e γ → 1 , sopravvive solo il primo membro che restituisce il secondo principio
della dinamica: F = m0
dv
dp
. In genere poniamo: F =
. Nella precedente formula,
dt
dt
dp
dp
=γ
... abbiamo moltiplicato F per γ , perché, se si studiano le formule di
ds
dt
trasformazione del campo elettrico e magnetico, si trova che il campo elettromagnetco (e
γF = c
7
Questa relazione è dimostrabile nell’elettromagnetismo classico, noi la usiamo, per
E hν h
esempio nell’introduzione al cap. 8, dove poniamo: p = =
= , dove h è la costanc
c
λ
te di Planck (vedi capitolo 4 e 7), ν e λ sono rispettivamente la frequenza e la lunghezza
d’onda del quanto di luce.
46
Cap. 2 – La dinamica
________________________________________________________________________
dunque la forza) si trasforma secondo Lorentz, se prendiamo appunto la forza classica
(forza di Lorentz) e lo moltiplichiamo per il fattore γ ; su questo punto torneremo al modp
è usata nel primo capitolo del secondo corso per trovadt
re il moto di elettroni in un campo magnetostatico (betatrone).
mento giusto. La formula F =
10. Andamento della massa in funzione della velocità
(da Phillips & Panofsky, pag. 318)
Consideriamo due particelle relativistiche di egual massa a riposo m 0 che entrino in collisione. Nel centro di massa esse hanno due velocità eguali e contrarie ( u ' e −u ' ) lungo
l’asse X e nel laboratorio due velocità diverse v1 e v 2 e due masse diverse m1 e m 2 , se
ammettiamo che le masse siano funzione della velocità. Utilizzando le formule di trasformazione delle velocità:
1. v1 =
2. v 2 =
u+v
uv
1+ 2
c
−u + v
e la conservazione della quantità di moto:
uv
1− 2
c
3. m1 v1 + m 2 v 2 = (m1 + m 2 )v ( v = velocità del baricentro nel laboratorio),
possiamo dimostrare che la massa dipende dalla velocità come: m =
m0
1− β 2
= m 0 γ . Ab-
biamo:
47
Cap. 2 La Dinamica
(m1 + m2 )v = m1v1 + m2 v2 = m1
(m1 + m2 )v(1 −
−(m1 + m2 )u
u 2v2
uv
c2
c
4
u+v
−u + v
+ m2
⇒
uv
uv
1+ 2
1− 2
c
c
) = m1 (u + v)(1 −
− ( m1 − m2 )v
uv
c2
uv
c
2
) + m2 (−u + v)(1 +
= ( m1 − m2 )u (1 −
uv
c2
) = ( m1 − m2 )u + (m1 + m2 )v
v2
u2
c
c2
) + (m1 + m2 )v(1 −
2
)⇒
(m1 − m2 )u
m − m2 uv
v2
u2
u 2v2 u 2
v2
(1 − 2 ) = −1 + 2 + 1 − 4 = 2 (1 − 2 ) ⇒ 1
=
⇒
(m1 + m2 )v
m1 + m2 c 2
c
c
c
c
c
uv
1+ 2
m1
c
=
m2 1 − uv
c2
1+
Adesso possiamo dimostrare che:
1−
m0
ovvero: m1,2 =
1−
48
1−
v12
c2
c2 =
uv
c
2
1−
1−
v 22
c2
. Abbiamo dunque:
v12
c2
.
v12,2
c2
2
Del resto:
uv
=
(u + v)
uv
1 + 2 −
c2
c
uv
1+ 2
c
2
1+ (
=
uv
(u 2 + v 2 )
c
c2
)2 −
2
1+
uv
c2
m1
=
m2
1−
1−
v22
c2 ,
v12
c2
Cap. 2 – La dinamica
________________________________________________________________________
2
e
1+
1−
1−
v 22
2
c
uv
c2 =
uv
c2
=
1−
1−
( −u + v )
uv
1 − 2 −
c2
c
uv
1− 2
c
2
1+ (
=
uv
(u 2 + v 2 )
c
c2
)2 −
2
1−
uv
da cui segue appunto che
c2
v 22
c2
.
v12
c2
11. Trattazione lagrangiana della meccanica
1. Le coordinate generalizzate e la Lagrangiana
Consideriamo un sistema di N particelle di massa m i , con i = 1,..., N e le cui coordinate
cartesiane siano ri . Supponiamo che esse siano soggette a dei vincoli “olonomi”, cioè
espressi da equazioni del tipo: f j (r1 ,..., rN , t ) = 0 per j = 1,..., M < 3N . Si potranno allora definire un numero di coordinate generalizzate (indipendenti), pari al numero di “gradi
di libertà” n = 3N − M , indicate con i simboli q i , i = 1,...n .
Possiamo prendere il pendolo semplice come facile esempio. Il punto materiale appeso al
filo inestensibile di lunghezza l, ha tre coordinate cartesiana x,y,z, che si riducono immediatamente a due (x,y), se vincoliamo il punto a oscillare su un piano (equazione del vincolo: z = 0 ). Se poi notiamo che il filo è vincolato (vincolo indipendente dal tempo o
“scleronomo”) in un punto (diciamo l’origine, per semplicità) e che per conseguenza le
coordinate x e y sono correlate (equazione del vincolo: x 2 + y 2 − l 2 = 0 ), ne deduciamo
facilmente che esiste una sola coordinata generalizzata: l’angolo θ=q1 (vedi cap. 2 delle
dispense).
Si possono esprimere le r j = r j (q1 ,..., q n , t ) e le
rɺj = v j = v j (q1 ,..., qn , qɺ1 ,...qɺn , t ) =
∂r j
∂r j
∑ ∂q qɺ + ∂t
l
l
in funzione delle coordinate genera-
l
lizzate e delle loro derivate temporali.
Nell’esempio del pendolo, si ha: r = lsenθi + l cos θj = lsenq1i + l cos q1 j , mentre la velocità sarà: v =
∂y
∂r
∂r ɺ
∂x
qɺ1 =
θ =( i +
j )θɺ = l (cos θi − senθj )θɺ .
∂q1
∂θ
∂θ
∂θ
Indicati con T =
1
2
∑m v
2
i i
e V = V (r1 ,..., rN ) , rispettivamente l’energia cinetica e po-
i
tenziale del sistema, definiamo “Lagrangiana” del sistema la quantità:
49
Cap. 2 La Dinamica
L = T (v1 ,..., v n ) − V (r1 ,..., rn ) , che, utilizzando le relazioni tra le coordinate cartesiane, le
velocità e le coordinate generalizzate e le loro derivate temporali diviene:
L = L(q1 ,...q n , qɺ1 ,...qɺ n , t ) . Da notare che stiamo supponendo che l’energia potenziale
dipenda solo dalle posizioni, non dal tempo o dalle velocità. La dipendenza esplicita dal
tempo della Lagrangiana deriva dal fatto che le equazioni vincolari sono in genere dipendenti esplicitamente dal tempo (“reonomi”). Proviamo a scrivere la Lagrangiana per il
nostro pendolo semplice, sempre a mo’ d’esempio.
1
1 ∂r
1
1
∂r
T = mv 2 = m
qɺ1 ⋅
qɺ1 = m(lθɺ) 2 = m(lqɺ1 ) 2 è l’energia cinetica e
2
2 ∂q1
∂q1
2
2
V = mgl (1 − cos θ ) = mgl (1 − cos q1 ) quella potenziale. (vedi dispense cap. 2); si ha così:
1
m(lqɺ1 ) 2 − mgl (1 − cos q1 ) . Da notare che la Lagrangiana non dipende espli2
citamente dal tempo, giacché il vincolo non dipende dal tempo.
L(q1 , qɺ1 ) =
2. Il principio di Hamilton e le equazioni di Lagrange
Consideriamo adesso lo spazio a n dimensioni con coordinate le q i (t ) per i = 1,..., n
(“spazio delle configurazioni”) e consideriamo due punti P1 = P1 (q1 (t1 ),..., q n (t1 )) e
P2 = P2 (q1 (t 2 ),..., q n (t 2 )) , ovvero due configurazioni del sistema meccanico ai due istanti t1 e t 2 . Poniamoci la questione: tra le infinite curve (“traiettorie”) che uniscono queste
due configurazioni, quale sarà la traiettoria realmente seguita dal sistema nell’andare dalla
prima alla seconda configurazione?
Il principio di Hamilton stabilisce che la traiettoria vera è quella che minimizza o massit2
mizza l’integrale della Lagrangiana in t :
∫ L(q ,...q
1
ɺ1 ,...qɺ n , t )dt
n,q
. Se indichiamo con un
t1
∆ la derivata di tale integrale, nel passare da una traiettoria ad un’altra infinitamente vicina, possiamo scrivere il principio di Hamilton nella forma:
t2
∫
∆ L (q1 ,..., q n , qɺ1 ,..., qɺ n , t )dt = 0 . Dimostrazione.
t1
Se passiamo all’istante generico t dalla traiettoria vera ad un’altra infinitamente vicina,
avremo che: q i (t ) → q i (t ) + δq i (t ) , dove i δq i (t ) saranno delle variazioni infinitesime
delle q i (t ) determinate ad ogni istante t dalla scelta della traiettoria. In conseguenza di
questi spostamenti infinitesimi, il valore della Lagrangiana cambierà da
L = L(q1 ,..., q n , qɺ1 ,..., qɺ n , t ) a L = L(q1 + δq1 ,..., q n + δq n , qɺ1 + δqɺ1 ,..., qɺ n + δqɺ n , t ) . Si avrà
così una variazione infinitesima della Lagrangiana che possiamo esprimere come:
∂L
∂L
δL =
δq i +
δqɺ i e una variazione dell’integrale che sarà l’integrale di questa varia∂q i
∂qɺ i
zione:
50
Cap. 2 – La dinamica
________________________________________________________________________
t2
t2
∫
∫
∆ L(q1 ,..., qn , qɺ1 ,..., qɺn , t )dt = (
t1
t1
t2
∂L
∂L
∂L
∂L dqi
)dt =
δqi +
δqɺi )dt = ( δqi +
δ
∂qi
∂qɺi
∂qi
∂qɺi dt
∫
t1
t2
t2
t2
∂L
∂L d ∂L
d ∂L
d ∂L
d ∂L
=
− ( ))δqi dt +
(
δqi + ( δqi ) − ( )δqi dt = (
δqi )dt =
∂qi
dt ∂qɺi
dt ∂qɺi
∂qi dt ∂qɺi
dt ∂qɺi
t1
t1
t1
∫
∫
t2
∫
t2
t
2
∂L d ∂L
∂L d ∂L
∂L
= (
− ( ))δqi dt +
δqi = (
− ( ))δqi dt = 0 ⇒
∂qi dt ∂qɺi
∂qɺi
∂qi dt ∂qɺi
t1
t1
t1
∫
⇒
∫
d ∂L
∂L
( )−
=0
ɺ
dt ∂qi
∂qi
Abbiamo così che il principio di Hamilton è soddisfatto, se sono valide le equazioni di
d ∂L
∂L
Eulero-Lagrange:
(
)−
= 0 . Equazioni che possono anche essere derivate per
dt ∂qɺi
∂qi
altra strada (principio dei “lavori virtuali”).
Per esemplificare, scriviamole (in effetti ce n’è una sola) per il pendolo semplice ( q1 = θ
):
∂L
∂L
d ∂L
= ml 2 qɺ1 = ml 2θɺ ⇒
= ml 2θɺɺ e
= − mglsenθ . Infine:
∂qɺ1
dt ∂qɺ1
∂q1
g
d ∂L
∂L
( )−
= ml 2θɺɺ + mglsenθ = 0 e, semplificando: θɺɺ + senθ = 0 , che
l
dt ∂qɺi
∂qi
avevamo già ottenuto partendo dal secondo principio della dinamica (dispense, cap. 2,
pag. 57).
Esercizi
1.
Dimostrare usando le equazioni di Lagrange e il principio di Hamilton che su un
piano il cammino più breve fra due punti è un segmento di retta.
Soluzione
La lunghezza di un arco infinitesimo che congiunge due punti di un piano è dato da:
dy
ds = dx 2 + dy 2 = 1+ y ' 2 dx , con y ' =
. La distanza tra due punti calcolata su un
dx
P2
P2
P2
P1
P1
P1
piano è così: s = ∫ ds = ∫ 1 + y ' 2 dx = ∫ Ldx . Occorre adesso minimizzare il valore
dell’integrale, cioè trovare la curva che ne minimizza il valore, cosa che possiamo fare
∂L
∂L ∂L
d ∂L
con l’equazione di Lagrange:
(
)−
= 0 , dove:
=
=0 e
dt ∂qɺ i
∂q i
∂q i ∂y
51
Cap. 2 La Dinamica
y'
d ∂L
d ∂L
d
(
)⇒
( )=
(
)=
dt ∂qɺ i
dx ∂y '
dx 1 + y ' 2
y ' ' 1 + y' 2 − y'
y'
1 + y'2
1 + y' 2
=
y ' ' (1 + y ' 2 ) − y ' 2 y ' '
(1 +
3
y' 2 ) 2
=
y' '
=
(1 + y '
2
3
)2
Ovvero la y = y (x) è la soluzione dell’equazione: y '' = 0 ⇔ y = ax + b
2.
Dimostrare usando le equazioni di Lagrange e il principio di Hamilton che su una
sfera il cammino più breve fra due punti è un arco di cerchio massimo.
Soluzione
La lunghezza di un arco infinitesimo che congiunge due punti su una sfera di raggio ρ è
data da: ds =
dx 2 + dy 2 + dz 2 = 1 + sen 2θ (
dϕ 2
) dθ . Questa formula si ottiene
dθ
dalla definizione di coordinate sferiche (Introduzione matematica alle dispense, pag. VII),
differenziandole, lasciando ρ costante, quadrando e sommando e ponendo per comodità
ρ = 1 . dθ 2 + sin 2 θ dϕ 2 = dϕ sin 2 θ + θɺ 2 ⇒ L = sin 2 θ + θɺ 2
dθ
; con θɺ =
.
dϕ
Calcoliamo le derivate per ottenere l’equazione di Lagrange:
∂L
sin θ cos θ
sin θ cos θ (sin 2 θ + θɺ 2 )
=
=
∂θ
(sin 2 θ + θɺ 2 )3/ 2
sin 2 θ + θɺ 2
(
)
ɺɺɺ
θɺɺ(sin 2 θ + θɺ 2 ) − θɺ θɺ sin θ cos θ + θθ
θɺ
θɺ
∂L
d ∂L
d
=
⇒
=
=
=
dϕ ∂θɺ dϕ sin 2 θ + θɺ 2
∂θɺ
(sin 2 θ + θɺ 2 )3/2
sin 2 θ + θɺ2
θɺɺsin 2 θ + θɺ2θɺɺ − θɺ2 sin θ cos θ − θɺ2θɺɺ θɺɺsin 2 θ − θɺ2 sin θ cos θ
=
=
(sin 2 θ + θɺ 2 )3/2
(sin 2 θ + θɺ 2 )3/2
Eguagliando i due termini e ignorando il denominatore:
θɺɺsin 2 θ − θɺ 2 sin θ cos θ = sin θ cos θ (sin 2 θ + θɺ 2 ) . Semplificando;
θɺɺsin 2 θ − 2θɺ 2 sin θ cos θ = sin 3 θ cos θ ⇒ θɺɺsin θ − 2θɺ 2 cos θ = sin 2 θ cos θ . Notiamo ades-
d 2 cos θ
(
) . Da cui:
so che il primo membro è: θɺɺsin θ − 2θɺ 2 cos θ = − sin 3 θ
dϕ 2 sin θ
52
Cap. 2 – La dinamica
________________________________________________________________________
cos θ
d 2 cos θ
cos θ
cos θ
) = sin 2 θ cos θ ⇒
(
)=−
,
, posto x =
sin θ
sin θ
dϕ sin θ
dϕ 2 sin θ
l’equazione diventa: ɺɺ
x + x = 0 la cui soluzione è:
− sin 3 θ
d2
2
(
cos θ
cos 2 θ
= α cos ϕ + β sin ϕ ⇒
= (α cos ϕ + β sin ϕ )2 ⇒
sin θ
1 − cos 2 θ
.
α cos ϕ + β sin ϕ
x = α cos ϕ + β sin ϕ ⇒
cos θ =
1 + (α cos ϕ + β sin ϕ ) 2
La coordinata z sulla sfera unitaria del punto sarà: z = cos θ =
ed inoltre sin θ =
x=
1
1 + (α cos ϕ + β sin ϕ ) 2
cos ϕ
1 + (α cos ϕ + β sin ϕ )
2
;y=
α cos ϕ + β sin ϕ
1 + (α cos ϕ + β sin ϕ ) 2
,
da cui:
sin ϕ
1 + (α cos ϕ + β sin ϕ ) 2
. Si vede subito che le coordi-
nate sono appunto quelle di un punto sulla sfera unitaria: x 2 + y 2 + z 2 = 1 .
La relazione: cos θ =
sin θ =
α cos ϕ + β sin ϕ
1 + (α cos ϕ + β sin ϕ ) 2
1
1 + (α cos ϕ + β sin ϕ ) 2
(ovvero l’altra
) definiscono la funzione θ = θ (ϕ ) che risulta essere
quella di un cerchio massimo. Dimostriamolo. Prendiamo un piano passante per l’origine
che ha equazione ax + by + cz = 0 . Trasformiamo le coordinate cartesiane in coordinate
sferiche prendendo ρ = 1 (sfera unitaria), otteniamo:
a sin θ cos ϕ + b sin θ sin ϕ + c cos θ = 0 ;
1 − cos 2 θ (α cos ϕ + β sin ϕ ) = − cos θ , quadran-
do e risolvendo in cos θ , si ottiene appunto: cos θ =
α cos ϕ + β sin ϕ
1 + (α cos ϕ + β sin ϕ ) 2
.
Data una superficie qualsiasi la curva più breve che unisce due punti si chiama “geodetica”. Generalizzando, diciamo che la geodetica in uno spazio con tensore metrico gij si
P2
ottiene minimizzando l’integrale:
∫ ∑
ij
gij dxi dx j che, usando l’arco di curva
P1
P2
come parametro si scrive:
∫ ∑
P1
dxi dx j
gij
ds =
ij
ds ds
P2
∫
P1
Lds con L =
∑
ij
gij
dxi dx j
.
ds ds
53
Cap. 2 La Dinamica
Dunque sarà:
d
ds
∂
∂(
dx k
)
ds
∑
ij
g ij
dxi dx j
∂
− k
ds ds ∂x
∑
ij
gij
dxi dx j
= 0 . Eventualds ds
mente il tensore metrico può essere funzione delle coordinate; per esempio nel
caso della sfera il tensore metrico aveva solo due termini diversi da zero:
g 22 = 1; g33 = sin 2 θ
3. Il brachistocrono. Consideriamo un punto materiale che cada scivolando lungo una curva y = y (x) ; trovare la curva cui corrisponde il minimo tempo di caduta.
Soluzione. L’equazione del tempo impiegato si trova dalla relazione:
2
1
ds x1 1 + y '
dx . Giacché: mv 2 = mgy ⇒ v = 2 gy and
= ∫
2
v
x0
x0
2 gy
t1
x1
∆t = ∫ dt = ∫
t0
ds = dx 2 + dy 2 = 1+ (
dy 2
) dx . Abbiamo preso l’asse Y rivolto verso il basso e
dx
1 + y' 2
l’origine nel punto da cui inizia la discesa. Poniamo adesso L =
e calcoliamo le
2 gy
derivate appropriate per trovare l’equazione di Eulero-Lagrange:
∂L
=
∂y '
1
y'
2 gy
1 + y' 2
d ∂L
=
dx ∂y '
=
∂L
=
∂y
;
y ' ' y (1 + y ' 2 ) − y '
y'
d
(
)=
2 g dx
y (1 + y ' 2 )
1
1
2g
2( y (1 + y '
2
3
)) 2
1 + y' 2
∂
1
(
)=−
2 g ∂y
y
2g
1
d ∂L ∂L
−
=0=
dx ∂y ' ∂y
1
3
2y 2
(
2g
1 + y' 2
3
2y 2
(1 +
=
1
2g
2 y ' ' y − y ' 2 (1 + y ' 2 )
2( y (1 + y '
2
3
)) 2
,
+ 1 + y ' 2 ) ⇒ La curva deve obbedire
all’equazione: 2 y' ' y − y' 2 (1 + y' 2 ) + (1 + y' 2 ) 2 = 2 y' ' y + y ' 2 +1 = 0 . Ovvero:
54
=
. Infine:
2 y ' ' y − y ' 2 (1 + y ' 2 )'
3
y'2 ) 2
2 y (1 + y ' 2 )
y (1 + y ' 2 )
2g
2 y ' ' y (1 + y ' 2 ) − y ' 2 (1 + y ' 2 ) − 2 yy ' 2 y ' '
1
y ' (1 + y ' 2 ) + y 2 y ' y ' '
Cap. 2 – La dinamica
________________________________________________________________________
y' ' = −
1 + y' 2
. A questo punto prendiamo l’equazione di una cicloide con la cuspide
2y
nell’origine: y ' =
2− y
1
e facciamo la derivata: y ' ' =
y
2
y − y ' y − (2 − y ) y '
=
2− y
y2
1 + y'2
1 2 y'
1
. Come si vede, abbiamo ottenuto dalla lagrangiana la
=
−
=
−
2 y' y 2
2y
y2
equazione di definizione della cicloide, derivata rispetto ad x una seconda volta. Ne segue
che la curva detta “brachistocrona” è una cicloide con la cuspide nel punto dove finisce la
discesa.
=−
3.
Il pendolo cicloidale.
Possiamo usare le equazioni di Lagrange per risolvere in modo diverso il problema del pendolo cicloidale. La cicloide inversa ha come equazioni parametri-
x = a (θ − senθ )
derivando si ottengono le componenti della velocità:
y = a (1 + cos θ )
xɺ = aθɺ(1 − cos θ )
yɺ = − aθɺ sin θ
che:
Da cui si ricava per l’energia cinetica:
1
m( xɺ 2 + yɺ 2 ) = ma 2θɺ 2 (1 − cos θ ) , mentre l’energia potenziale è:
2
V = mgy = mga (1 + cos θ ) e la lagrangiana sarà:
L = ma 2θɺ 2 (1 − cos θ ) − mga (1 + cos θ ) . Scriviamo adesso l’equazione di L.
T=
∂L
∂L
= ma 2θɺ2 sin θ + mga sin θ ; ɺ = 2ma 2θɺ(1 − cos θ )
∂θ
∂θ
d ∂L
= 2ma 2θɺɺ(1 − cos θ ) + 2ma 2θɺ 2 sin θ . Da cui ricaviamo l’equazione di Lɺ
dt ∂θ
2ma 2θɺɺ(1 − cos θ ) + 2ma 2θɺ 2 sin θ = ma 2θɺ 2 sin θ + mga sin θ
1
g
θɺɺ(1 − cos θ ) + θɺ 2 sin θ = sin θ
2
2a
θ
θ
θ g
θ
θ
2θɺɺsin 2 + θɺ 2 sin cos = sin cos
2
2
2 a
2
2
55
Cap. 2 La Dinamica
d2
θ
1
θ g
θ
+ θɺ 2 cos =
cos . Il primo membro è: −2 2 cos e pertanto,
2 2
2 2a
2
dt
2
2
2
d
θ
g
θ
g
θ d x
abbiamo:
cos = − cos e, posto x = cos , 2 = −
xo
2
dt
2
4a
2
2 dt
4a
g
g
a
ɺɺ
(ovvero: T = 4π
) è l’equazione
x+
x = 0 , che, posto ω 2 =
4a
4a
g
θɺɺsin
θ
dell’oscillatore. Questo ci dice che le oscillazioni sono isocrone e che:
θ (t ) = 2 arccos(cos(ωt )) = 2ωt che sostituita nell’espressione delle coordinate ce le
dà in funzione del tempo.
3. Le equazioni di Hamilton
Posto: pi ( qɺi , qi ) =
∂L
, detto “momento coniugato alla coordinata generalizzata q i ”,
∂qɺi
possiamo riscrivere le equazioni di Lagrange: pɺ i =
∂L
. Possiamo poi invertire le equa∂q i
zioni di definizione e avere: qɺ i = qɺ i (q i , p i ) , sostituire nella Lagrangiana e, infine, definire la hamiltoniana: H ( p i , q i , t ) =
∑ p qɺ
i i
− L( q i , p i , t ) .
i
Si può dimostrare che:
∑ p qɺ
i i
= 2T e quindi: H = 2T − T + V = T + V , che risulta così
i
l’energia totale del sistema. E’ infatti:
dr dr 1
dri dri
1
∂T
T=
mi i ⋅ i =
mi
⋅
qɺ j qɺ k ⇒ p k =
=
2 i
dt dt 2 i
dq
dq
∂
qɺ k
j
k
jk
∑
=
∑ ∑
∑m ∑
i
i
j
dri dri
⋅
qɺ j ⇒
dq j dq k
∑
k
p k qɺ k =
∑m ∑
i
i
jk
dri dri
⋅
qɺ j qɺ k = 2T
dq j dq k
.
Lasciamo allo studioso lettore di mostrare che l’hamiltoniana per il pendolo semplice è:
p2
1
H = m(lθɺ) 2 + mgl (1 − cos θ ) = 1 2 + mgl (1 − cos q1 ) .
2
2ml
Se l’energia cinetica non dipende (esplicitamente) dalle coordinate:
∂L
∂V
∂H
∂H
e, dunque: pɺ i = −
. Del resto, dalla definizione di hamilto=−
=−
∂q i
∂qi
∂qi
∂qi
niana si ha: qɺ i =
56
∂H
.
∂p i
Cap. 2 – La dinamica
________________________________________________________________________
∂H
pɺ i = − ∂q
i
Le equazioni:
sono le equazioni di Hamilton.
qɺ = ∂H
i ∂p i
Nella formulazione di Lagrange ci sono dunque n variabili, le coordinate generalizzate e
le n equazioni sono del secondo ordine. La formulazione hamiltoniana usa 2n variabili, le
coordinate generalizzate e i momenti coniugati, soggetti a 2n equazioni del primo ordine.
p
Per il nostro pendolo, le due equazioni di Hamilton sono: pɺ 1 = − mglsenθ e θɺ = 12 .
ml
Derivando la seconda e sostituendovi l’espressione di pɺ 1 data dalla prima, si riottene
l’equazione di Lagrange del pendolo. In verità, in questo modo, usare le equazioni di Hamilton non farebbe guadagnare nulla rispetto ad usare le equazioni di Eulero-Lagrange.
Tuttavia, se l’energia potenziale non dipende (esplicitamente) dal tempo, allora:
dH
=
dt
∑ ( pɺ qɺ
i i
i
+ p i qɺɺi −
∂L
∂L
qɺɺi −
qɺ i ) = 0 cioè: la hamiltoniana è conservata. Possia∂qɺ i
∂q i
mo usare questa proprietà per sostituire l’espressione di
p1 = 2ml 2 H − 2m 2 gl 3 (1 − cos q1 ) nella seconda e ottenere:
g
(1 − cos q1 ) , che l’attento lettore non mancherà di identificare con
l
ml
l’espressione già trovata precedentemente.
Rimane un ultimo punto: come introdurre il campo magnetico in questa trattazione, giacché campi gravitazionali ed elettrostatici vi entrano già attraverso il potenziale scalare?
La risposta è che occorre solo sostituire (principio di minimalità) ai momenti coniugati
pi le espressioni: pi + qi Ai dove le Ai sono le componenti del potenziale vettore.
θɺ = 2
H
2
−2
Simmetrie della lagrangiana e quantità conservate
Dimostriamo che, se la Lagrangiana è invariante rispetto ad un cambiamento di assi:
x' h = x' h ( x k ) , allora c’è una quantità conservata.
Se la lagrangiana non cambia, facendo la trasformazione d’assi
δL = 0 =
(
x' h = x' h ( x k ) , allora:
∂L ∂qi ∂x k
∂L ∂qɺ i ∂x k
δx' h +
δx' h =
∂qi ∂x k ∂x' h
∂qɺ i ∂x k ∂x' h
∂L ∂qi ∂L ∂qɺ i ∂x k
∂L ∂qi ∂L ∂qɺ i
+
)
δx' h ⇒
+
= 0 , usando le equazioni
∂qi ∂xk ∂qɺ i ∂xk ∂x' h
∂qi ∂x k ∂qɺ i ∂x k
di Eulero-Lagrange, possiamo scrivere:
57
Cap. 2 La Dinamica
∂L ∂qi ∂L ∂qɺ i
d ∂L ∂qi ∂L d ∂qi
d ∂L ∂qi
+
= (
+
)
(
)= (
) = 0 . Ov∂qi ∂x k ∂qɺ i ∂x k dt ∂qɺ i ∂x k ∂qɺ i dt ∂x k
dt ∂qɺ i ∂x k
∂L ∂qi
sono conservate. Prendiamo come esempio una particella libevero le quantità:
∂qɺ i ∂xk
ra e facciamo una traslazione degli assi (cartesiani). Assumiamo che la Lagrangiana rimanga invariante; le qi sono le coordinate cartesiane della particella; le quantità
∂L
sono le componenti della quantità di moto della particella e le
∂qɺ i
∂q i ∂x i
=
= δ ik sono nulle almeno che i due indici non siano uguali. In conclusione, le
∂x k ∂x k
pi =
quantità conservate sono le componenti della quantità di moto. La conservazione della
quantità di moto si può allora ritenere una conseguenza dell’invarianza della Lagrangiana
rispetto alle traslazioni.
Vediamo un altro esempio. L’energia lagrangiana del sistema Terra - Sole è:
1
A
L=
( µρɺ )2 + ( µρφɺ)2 + 8.Come si vede, essa non dipende dalla coordinata φ , per
2µ
ρ
∂H
∂H
cui Jɺ =
=0⇒
= µρ 2φɺ = J = cos t , usando le notazioni del cap. 4. In conclusioɺ
∂φ
∂φ
ne, il momento della quantità di moto J è conservato, proprietà questa che avevamo appunto usato nella soluzione del problema dei moti centrali. Abbiamo anche visto che, se il
tempo è ignorabile, la lagrangiana cioè non ha dipendenza esplicita dal tempo, allora
l’energia è conservata. Dunque, se la Lagrangiana non ha dipendenza esplicita da una
coordinata generalizzata q i (coordinata ciclica o ignorabile) o dal tempo, il corrispondente
∂L
= 0 .Supponiamo che una coordi∂q i
nata sia ignorabile, allora una trasformazione che cambi solo quella variabile (come nel
caso di una traslazione per una coordinata cartesiana, ma anche per una rotazione intorno
ad un asse nel caso di una coordinata data da un angolo) non cambierà la lagrangiana. Ne
segue, di nuovo, che le coordinate ignorabili producono una quantità conservata.
L’invarianza della lagrangiana è spesso chiamata una simmetria della lagrangiana appunto
perché essa rimane invariante sotto una trasformazione di quella variabile. Possiamo allora dire che una simmetria della lagrangiana corrisponde ad una variabile dinamica consermomento coniugato o l’energia è conservato: pɺ i =
8
Usando la definizione di coordinate sferiche di pag. VII delle dispense, l’energia cinetica
1
di una particella è: T = m( ρɺ 2 + ( ρθɺ) 2 + ( ρφɺsenθ ) 2 ) , come si calcola derivando le
2
coordinate cartesiane, quadrando e sommando. Anche così, la coordinata φ non appare e
il suo momento coniugato è conservato.
58
Cap. 2 – La dinamica
________________________________________________________________________
vata. Tuttavia mentre l’ignorabilità di una coordinata conduce di sicuro ad una quantità
fisica conservata, il viceversa non è vero nel senso che possono esistere delle trasformazioni che conducono ad una simmetria della lagrangiana senza che esse corrispondano a
coordinate ignorabili. Una tale simmetria è l’invarianza di gauge che esaminiamo nel
prossimo paragrafo.
Invarianza di gauge e conservazione della carica
Un punto molto importante da notare è che, se facciamo una trasformazione di gauge (
∂f
ϕ → ϕ − ; A → A + ∇f ) allora la lagrangiana cambia con l’aggiunta della derivata tota∂t
le di una funzione rispetto al tempo; ciò non modifica le equazioni di Eulero-Lagrange: si
ottiene cioè una lagrangiana equivalente. Insomma possiamo dire che una trasformazione
di gauge non cambia la lagrangiana, anche se in realtà non cambiano le equazioni del
campo che da essa si deducono. Dimostriamo che, se abbiamo la seguente trasformazione
dg
della lagrangiana: L → L +
, le equazioni di Eulero-Lagrange rimangono le stesse.
dt
Applicando il principio di Hamilton:
t2
∫
t2
t2
∫
L (q1 ,...q n , qɺ1 ,...qɺ n , t )dt → L(q1 ,...q n , qɺ1 ,...qɺ n , t )dt +
t1
t1
∫
t1
t2
dg
dt = L(q1 ,...q n , qɺ1 ,...qɺ n , t )dt +
dt
∫
t1
t2
+ g (t 2 ) − g (t 1 ) =
∫ L(q ,...q
1
ɺ1 ,...qɺ n , t )dt
n,q
+G
t1
Nel processo di minimizzazione la costante G non darà contributo e le equazioni di Lagrange dovranno per forza rimanere le stesse.
dg
Dimostriamo adesso che una variazione della gauge comporta appunto che L → L +
.
dt
L=
∑ (T − q (φ (r ) − v ⋅ A( r , t ))) , i termini
i
i
i
i
i
−qi (φ ( ri ) − vi ⋅ A( ri , t )) si trovano aggiun-
i
∂f
∂f ∂f dx ∂f dy ∂f
− vi ⋅ ∇f ) = qi ( +
+
+
∂t
∂t ∂x dt ∂y dt ∂z
dando che, a causa della conservazione della carica e del fatto che
∂ρ
∂ρ
∂ρ dx ∂ρ i
ji = qi δ ( r − ri )vi = ρi vi , è: 0 = ∇ ⋅ ji + i = i + i
+
∂t
∂t
∂x dt
∂y
ti i due termini: − qi ( −
dz
df
) = qi
. Ricordt
dt
dy ∂ρ i dz d ρ i
+
=
,
dt
dt
∂z dt
∂ρ
possiamo aggiungere ai due termini precedenti il prodotto 0 = (∇ ⋅ ji + i ) f , ottenendo:
∂t
d ρi
∂ρ i
df
d
∂f
) f = ρi
ρ i ( + v i ⋅ ∇f ) + ( ∇ ⋅ j +
+ f
= ( f ρ i ) . Il fatto che la lagrangiana
dt
dt
dt
∂t
∂t
non venga modificata (nel senso spiegato sopra) da una trasformazione di gauge, come si
vede, è equivalente al fatto che la carica si conserva.
59
Cap. 2 La Dinamica
Generatori di una trasformazione
Data una funzione G = G (qi , pi ) , possiamo definire una trasformazione con le seguenti
∂G
∂G
δα e δ pi = −
δα . G è chiamata il generatore della trasformap
∂ i
∂qi
zione. Vediamo l’effetto della trasformazione su un’altra funzione F :
relazioni: δ qi =
δF =
n
∂F
1
i
∑ ( ∂q
δ qi +
∂F
δ pi ) =
∂pi
n
∂F ∂G ∂F ∂G
)δα . Se prendiamo: F = H
−
∂pi ∂pi
i ∂q i
∑ ( ∂q
1
(l’hamiltoniana), abbiamo:
δH =
n
∑
1
(
∂H ∂G ∂H ∂G
)δα =
−
∂qi ∂pi ∂pi ∂qi
n
∂G
∑ ( ∂q
1
i
qɺ i +
dG
∂G
. Se l’hamiltoniana
pɺ i )δα =
dt
∂pi
dG
= 0 . Ne segue che, se G è il
dt
generatore di una trasformazione che lascia l’hamiltoniana invariante, allora G è conservata.
Consideriamo una rotazione del sistema intorno all’asse Z, le formule di trasformazione
x ' = x cos α − y sin α
x ' = x − yδα
sono:
che per un angolo infinitesimo divengono:
,
y ' = x sin α + y cos α
y ' = xδα + y
rimane invariante, allora: δ H = 0 e per conseguenza
δ x = − yδα
ovvero:
, lo stesso si può scrivere per le componenti della quantità di moto:
δ y = xδα
δ p x = − p y δα
. D’altra parte, se consideriamo la componente Z del momento della
δ p y = p x δα
∂Lz
∂Lz
quantità di moto Lz = xp y − yp x , allora possiamo scrivere
= − px ,
= py ,
∂x
∂y
∂Lz
∂Lz
= x . Si vede per confronto con le equazioni di definizione di generatore
= −y,
∂p x
∂p y
che Lz è il generatore delle rotazioni intorno all’asse Z. Se l’hamiltoniana non cambia
sotto una rotazione, il generatore della rotazione, cioè Lz , è conservato.
Unità di misura
Le unità di misura fondamentali sono:
1. Unità di lunghezza: 1.650763,73 volte la lunghezza d’onda nel vuoto della radiazione emessa dal 86 Kr nella transizione fra i livelli 2 p10 e 5d 5 .
2. Unità di massa: è la massa del prototipo internazionale conservato al Pavillon de
Breteuil (Sèvres) da B.I.P.M.
60
Cap. 2 – La dinamica
________________________________________________________________________
3.
Il secondo è l’intervallo di tempo che contiene 9.192.631,770 periodi della radiazione corrispondente alla transizione tra i due livelli iperfini dello stato fondamentale dell’atomo di 133Cs .
Complementi ed esercizi
Complementi
Teoria del pendolo esteso
Consideriamo dapprima un pendolo semplice, cioè un sistema costituito da una massa
puntiforme M appesa ad un filo di lunghezza L e massa nulla.
Il periodo di oscillazione nell’approssimazione dei piccoli angoli è dato
dall’equazione:
T=
2π
L
g
dove g è l’accelerazione di gravità. Tale equazione può essere risolta rispetto a g:
2
2π
g =
L
T
Questo significa che possiamo determinare g misurando L e T. Ma il pendolo semplice è un sistema ideale che non si può realizzare praticamente in modo da ottenere misure accurate di g.
Consideriamo quindi un corpo esteso di massa M, baricentro G, momento d’inerzia
rispetto al baricentro IG e sia A un punto di sospensione attorno a cui il corpo possa
oscillare liberamente, sia ζA la distanza di A da G. Per piccoli angoli, il periodo è:
2
IA
2π I G + Mζ A
=
Mζ A
g Mζ A
g
ove IA è il momento di inerzia rispetto al punto A. Nella seconda eguaglianza è stato
usato il teorema di Steiner. Questo stabilisce che il momento d’inerzia di un corpo di
massa M, rispetto ad un asse passante per un punto A a distanza ζA dal baricentro è
uguale al momento di inerzia rispetto all’asse parallelo al primo, passante per il baricentro, aumentato della quantità MζA 2.
Risolvendo rispetto a g:
Quindi la determinazione di g dipende dalla misura di , T, M, ζA, IG. Qui c’è una
TA =
2π
2π I G + Mζ A
g =
Mζ A
T
difficoltà, perché le misure di momenti d’inerzia sono generalmente difficili da eseguire e scarsamente accurate: sembra che il problema sia diventato ancora più complicato di prima. Vedremo subito però che, con un sistema opportunamente scelto, si
può prescindere dalla conoscenza non solo di IG, ma anche di M e ζA.
2
2
61
Cap. 2 La Dinamica
Cerchiamo se esistono punti di sospensione B tali che il periodo di oscillazione corrispondente TB sia uguale a TA. Detta x la distanza di B da G, ciò equivale a cercare le
soluzioni dell’equazione:
I G + Mζ A2 I G + Mx 2
=
Mζ A
Mx
Moltiplicando per i denominatori e ordinando rispetto a x, si ottiene un’equazione di
secondo grado:
x2 −
MζA 2 + I G
I
x+ G =0
Mζ A
M
Una prima, ovvia, soluzione si ottiene ricordando il teorema di Steiner: tutti i punti
che si trovano a ugual distanza dal baricentro hanno lo stesso momento di inerzia, in
tal caso sono soluzioni tutti i punti per cui
x1 = ζ A
Chiameremo questi punti equivalenti. Ma è anche possibile avere come soluzione
punti che si trovano a distanza diversa dal baricentro. Si trova infatti come seconda
soluzione:
x2 =
IG
Mζ A
che è in generale diversa dalla prima. La somma delle due soluzioni non è altro che
l’opposto del coefficiente del termine di prima nell’equazione di secondo grado in x:
x1 + x 2 = ζ A +
IG
MζA 2 + I G
=
Mζ A
Mζ A
Questa formula è molto importante perché, se noi scegliamo i punti A e B in modo
che siano allineati con G e giacciano da parti opposte rispetto a questo punto allora,
detta l la distanza dei punti A e B, otteniamo:
TA =
2π
x1 + x 2 =
2π
l
g
g
Punti A e B che soddisfano questa condizione vengono detti coniugati.
62
Cap. 2 – La dinamica
________________________________________________________________________
L’equazione trovata per il periodo stabilisce che, se siamo in grado di trovare due
punti coniugati opposti rispetto al baricentro, allora per determinare g non è necessario conoscere M, ζA, IG. Risolvendo rispetto a g otteniamo infatti:
2
2π
g =
l
T
Questa formula può anche essere interpretata, dicendo che un pendolo fisico in cui si
sia raggiunta la condizione di coniugio per i due punti di sospensione, equivale ad un
pendolo semplice di lunghezza pari alla distanza fra di essi.
Si noti che punti equivalenti non sono, in generale, coniugati.
Oscillatore forzato
Introduciamo un fattore di attenuazione proporzionale alla velocità nella equazione dell’oscillatore armonico (m=massa e k= costante elastica): mɺxɺ + γxɺ + kx = 0
ɺxɺ + βxɺ + ω 2 x = 0 e troviamo le soluzioni dell’equazione algebrica associata::
λ2 + βλ + ω 2 = 0 . λ = −
β
2
±
β2
4
− ω 02 ; con ω 0 =
k
, β = γ /m.
m
Quindi le soluzioni sono:
x( t ) = e
che
β2
4
− β2 t
Ae
2
− ω0 < 0
β2
4
− ω02 t
+ Be
−
β2
4
−ω02 t
con A e B costanti complesse. Supponiamo
Poniamo: A = Ce iφ e B = Ce − iφ
( A e B devono essere numeri complessi coniugati perché la soluzione sia reale)
x ( t ) = Ce
= Ce
− β2 t
− β2 t
i (ϕ +
e
ω02 −
β2
4
t)
+e
− ( iϕ + ω02 −
β2
4
t)
2
2
= Ce − β2 t cos 4ω0 − β t + ϕ =
4
.
cos ( ω t + ϕ )
Un moto oscillante con un’ampiezza che decade esponenzialmente dunque, se
β < 2ω0 . Un decadimento esponenziale dopo il primo massimo, se β > 2ω0 .
Aggiungiamo ora un forza periodica di pulsazione ω : F = F0 cos(ω t ) .
63
Cap. 2 La Dinamica
ɺɺ
x + β xɺ + ω 02 x = A0 cos ω t , con A0 =
F0
. Le soluzioni sono quelle di prima
m
più una soluzione particolare. Cerchiamo una soluzione particolare nella forma:
A cos(ωt + ϕ ) = A(cos ωtcosϕ − sin ωt sin ϕ ) :
ɺɺ
x = −ω 2 A(cos ωtcosϕ − sin ωt sin ϕ )
β xɺ = − βω A(sin ωtcosϕ + cos ωt sin ϕ )
2
2
ω0 x = ω0 A(cos ωtcosϕ − sin ωt sin ϕ )
Sommando e mettendo in evidenza, si ha:
A(((ω02 − ω 2 )cosϕ − βω sin ϕ ) − A0 ) cos ωt − A((ω02 − ω 2 )sin ϕ + βω cos ϕ ) sin ω t = 0
A((ω 2 − ω 2 )cosϕ − βω sin ϕ ) = A
0
0
2
2
A((ω0 − ω )sin ϕ + βω cos ϕ ) = 0
Dalla seconda: tan ϕ = −
cos ϕ =
βω
(ω02
(ω02 − ω 2 )
(ω02 − ω 2 )2 + β 2ω 2
−ω )
2
⇒ sin ϕ = −
βω
(ω02 − ω 2 )2 + β 2ω 2
e
.
Usando la prima si ha:
A=
(ω02
A0
2 2
−ω ) + β ω
2 2
(ω02 − ω 2 )2 + β 2ω 2 =
(ω02
A0
2 2
− ω ) + β 2ω 2
In conclusione, l’ampiezza è funzione della frequenza della forza; la massima
ampiezza si ottiene per ω0 = ω (risonanza).
64
Cap. 2 – La dinamica
________________________________________________________________________
F1
Ampiezza (a.u.)
40
20
0
0
200
frequenza angolare (rad/s)
Leggi dell’attrito
a) L’attrito statico
Si consideri un corpo P appoggiato su una superficie S (che supporremo piana per
semplicità) e si indichi con N la forza normale ad S che agisce su P. In molti casi di
interesse pratico questa forza risulta essere la componente del peso perpendicolare alla superficie di appoggio. Tuttavia, si possono presentare anche situazioni diverse,
come per esempio la presenza di una forza esterna aggiuntiva che “preme” sul corpo.
Le interazioni tra il corpo appoggiato e la superficie di appoggio, molto complesse se
esaminate da un punto di vista microscopico, possono essere schematizzate in maniera abbastanza semplice, seppure solo in prima approssimazione. Se il corpo non può
penetrare all’interno della superficie, questa interazione ha una prima componente
esattamente opposta ad N (la cosiddetta reazione normale) ed una seconda componente tangente ad S (con verso tale da “ostacolare il moto”): proprio questa componente costituisce l’attrito.
Le leggi dell’attrito forniscono un legame tra la componente tangente dell’interazione
tra P ed S (l’attrito) e le caratteristiche di P ed S, in particolare le loro superfici di
contatto.
Si verifica sperimentalmente che la situazione risulta essere diversa nel caso di moto
relativo tra P ed S rispetto al caso di quiete tra P ed S. Nel primo caso, si parla di attrito dinamico, nel secondo caso di attrito statico. Ci si occuperà prima dell’attrito statico.
65
Cap. 2 La Dinamica
La legge dell’attrito statico esprime la massima forza di attrito che si può sviluppare
tra due superfici asciutte e soddisfa le seguente leggi empiriche:
a) È approssimativamente indipendente, entro grandi limiti, dall’area della superficie
di contatto.
b) È proporzionale alla forza normale applicata sul corpo P secondo una certa costante (coefficiente di attrito statico), che dipende dal tipo di superfici e dal loro grado di
levigatura. La costante può anche essere maggiore di uno, sebbene sia comunemente
minore di uno.
Queste leggi empiriche possono essere compendiate nella formula: Fs ≤ µ s N , dove Fs rappresenta l'attrito statico e µ il coefficiente di attrito statico.
Occorre sottolineare che la legge di attrito statico non è un’equazione, cioè non fornisce direttamente il modulo della forza di attrito effettivamente esercitata: da essa si
può solo ricavare il modulo della massima forza che - alle condizioni date - si può
sviluppare. Per determinare il valore effettivo della forza di attrito, occorre utilizzare
le equazioni della dinamica (imponendo che il corpo abbia accelerazione nulla).
Si noti che l'attrito si manifesta solo se vi sono delle forze che tendono a far muovere
una superficie rispetto all’altra. Si consideri, per esempio, il corpo P appoggiato su un
piano orizzontale S, nell’ipotesi che l'unica forza esterna agente sia il peso, W , di P,
come in figura. Allora il piano di appoggio reagirà con una forza, R , perpendicolare
al piano stesso, esattamente come se non ci fosse alcun attrito
R
W
Si esamini ora un’altra situazione: il corpo P è appoggiato su un piano S, inclinato di
un angolo θ, rispetto all’orizzontale e sottoposto solo all’azione della forza peso. Il
corpo si muove a causa dalla componente del peso parallela al piano inclinato:
W// = mgsenθ . In questo caso l’attrito si opporrà al moto del corpo. Se la forza di attrito sviluppata non sarà sufficiente, il corpo comincerà a muoversi verso il basso e le
considerazioni relative al caso statico non saranno più valide. In sostanza se il corpo
rimane fermo significa che l’attrito è in grado di bilanciare esattamente la componente parallela del peso, per cui l’attrito stesso avrà modulo Fs = mgsenθ ; se invece il
corpo si mette in moto significa che la componente parallela del peso è, in modulo,
più grande del massimo attrito possibile, ed allora non riuscirà ad impedire il moto.
66
Cap. 2 – La dinamica
________________________________________________________________________
W par = mgsenθ
Wort = mg cos θ
Maggiore è l’inclinazione del piano, minore sarà il più grande attrito possibile, perché
all’aumentare dell’inclinazione diminuisce la componente perpendicolare del peso.
All’aumentare dell’inclinazione del piano, aumenta la componente parallela del peso.
*
Il massimo angolo θ max
che consente l’equilibrio è quello per cui
*
*
*
mgsenθ max
= µ s mg cos θ max
, ovvero tg θ max
=µs. Questa osservazione consente una
semplice determinazione sperimentale di µs: basta appoggiare un corpo su un piano e
inclinare il piano fin tanto che il corpo comincia a muoversi; la tangente dell’angolo
per cui il corpo comincia a muoversi, è il coefficiente di attrito statico cercato.
Non appena il corpo comincia a muoversi, però, occorre considerare l’attrito dinamico.
b) L’attrito dinamico
Nel caso di moto relativo tra le due superfici a contatto, la forza di attrito presente,
che indichiamo con Fd , soddisfa alle stesse leggi empiriche del caso statico.
Essa ha, come nel caso statico, direzione tangente alle superfici che sono a contatto,
verso opposto alla velocità e modulo dato da: Fd = µ d N con µd coefficiente di attrito dinamico. Si noti che questa legge fornisce proprio il modulo della forza e non,
come nel caso statico, solo il massimo valore. Normalmente µd risulta essere minore
di µs.
67
Cap. 2 La Dinamica
Fd
Occorre notare che la forza di attrito, costante fin che dura il moto, scompare non appena il corpo si ferma.
Riprendiamo in esame il caso di un corpo, sottoposto solo all'azione della forza peso
come forza esterna, appoggiato su un piano inclinato di un angolo θ>0 e supponiamo
che sia in moto. Distinguiamo il caso di corpo in moto verso l’alto o verso il basso.
1- Corpo in moto verso l’alto
Un corpo poggiato su un piano inclinato può essere in moto verso l’alto solo per effetto di una velocità iniziale impressa da un agente esterno. In questo caso l’attrito dinamico è diretto verso il basso e si somma alla componente tangente della forza peso,
rallentando il moto, che sarà quindi uniformemente decelerato, fino all’annullarsi della velocità. Raggiunta la posizione più alta in cui la velocità si annulla si possono presentare due situazioni.
*
Se l’angolo θ è minore del massimo angolo θ max
che consente l’equilibrio, il corpo si
fermerà nella posizione raggiunta, in quanto l’attrito statico (che compare nel momento in cui la velocità si annulla) è in grado di mantenere l’equilibrio.
*
, il corpo inizierà un moto uniSe l’angolo θ è maggiore del massimo angolo θ max
formemente accelerato verso il basso, in quanto l’attrito statico (che compare solo per
un breve istante quando la velocità si annulla) non è grado di mantenere l’equilibrio.
2- Corpo in moto verso il basso
Se il corpo è in moto verso il basso, l’attrito dinamico è invece diretto verso l’alto e si
*
oppone alla componente tangente della forza peso. Se l’angolo θ è maggiore di θ max
,
l’attrito statico non è in grado di bilanciare la componente tangente del peso e, a maggior ragione, non può farlo l’attrito dinamico che è minore di quello statico: il moto
sarà uniformemente accelerato verso il basso.
*
Se l’angolo θ è minore od uguale al massimo angolo θ max
, essendo la forza totale pa-
rallela al piano di appoggio data da mgsenθ − µ d mgcosθ = mgcosθ (tan θ − µ d ) , si
possono presentare diverse situazioni.
Per un particolare angolo δ, tale che tan δ = µ d , la forza totale è nulla e dunque il
moto è rettilineo ed uniforme verso il basso. Se θ <δ la forza è diretta verso l’alto ed
il moto è uniformemente decelerato: il corpo si fermerà quando avrà raggiunto veloci68
Cap. 2 – La dinamica
________________________________________________________________________
*
tà nulla. Se θ max
> θ >δ la forza è diretta verso il basso ed il moto è uniformemente
accelerato verso il basso. Quest’ultimo caso è identico a quello che si verifica quando
*
l’angolo θ è maggiore di θ max
: bisognerà solo tenere conto che mentre nel caso precedente il corpo poteva mettersi in moto spontaneamente, in questo caso deve essere
messo in moto da un agente esterno.
Esercizi
1.
L’accelerazione dovuta alla gravità sulla Luna è circa 1/6 di quella terrestre. Se un
oggetto viene lanciato verticalmente verso l’alto sulla Luna, quante volte andrà più in
alto di uno lanciato sulla Terra, supponendo che la velocità iniziale sia la stessa?
2.
Una pietra viene lanciata verticalmente verso l’alto con una velocità di 18,0m/s. A
che velocità si muoverà una volta raggiunta l’altezza di 12,0m dal suolo? Quanto
tempo impiega a raggiungere quest’altezza?
3.
Un blocco è sospeso ad un filo di massa trascurabile che passa su un piolo privo di
attrito ed è collegato ad un altro blocco che poggia su un tavolo privo di attrito. Si
trovino l’accelerazione di ciascun blocco
a) Se le masse sono m1=2kg, m2=8kg.
b) Se le masse vengono scambiate.
4.
Un corpo di massa m=0,7kg è appeso tramite un filo ad una piattaforma che sale con
accelerazione a=2m/s2.
a) Calcolare la tensione del filo
b) Se il filo si rompe quando la tensione supera il valore di 10N, qual’è la massima
accelerazione tollerata?
5.
Calcolare l’accelerazione di gravità a Udine, cioè alla latitudine di 46° 03’.
6.
Il piano di oscillazione di un pendolo semplice è invariante rispetto allo spazio assoluto. Di conseguenza, un pendolo che oscillasse al polo nord, dunque nel piano di un
meridiano, oscillerebbe in un piano che, essendo fermo rispetto alle stelle fisse, ruoterebbe, se visto dalla Terra, ogni 24 ore. Ad una latitudine diversa dai 90°, chiamiamola λ, il piano di oscillazione ruota ancora, se visto dalla Terra, ma con un periodo diverso. Spiegare il perché.
7.
Il baricentro del sistema solare gira intorno al centro della galassia con una velocità di
239km/s e completa una rotazione in 220 milioni d’anni. Calcolare la velocità angolare e la distanza dal centro della via Lattea.
8.
Una massa di 0,15kg attaccata ad una molla compie un moto armonico durante il quale la velocità massima è di 3m/s e l’accelerazione massima è di 12m/s2. Quanto vale la
costante elastica della molla in N/m?
69
Cap. 2 La Dinamica
9.
La quantità di moto di un razzo aumenta o diminuisce durante il volo?
10. Con che velocità rincula un fucile del peso di 2kg dopo aver sparato un proiettile di
10g avente una velocità di 285m/s?
11. Calcolare la lunghezza di un pendolo che “batte il secondo”, cioè che ha un semiperiodo pari ad un secondo. Se per vincere gli attriti, occorre fornire all’orologio
18 ⋅10 −6 J ad ogni semiperiodo, in quanto tempo arriva a terra il peso di 1,5kg che
fornisce l’energia, se esso cade da un’altezza di 80cm? Se portiamo il nostro orologio
ad una latitudine diversa dove g diminuisce, il pendolo funzionerà più o meno a lungo?
12. Un pendolo di lunghezza pari ad 1m e massa di 150g oscilla con un’ampiezza massima di 5°. Calcolarne l’energia totale e la velocità massima.
13. Se il pendolo di cui all’esercizio precedente, lasciato ad oscillare senza che gli venga
fornita energia, si arresta dopo 78 oscillazioni, quanta energia perde ad ogni oscillazione in media? Quanta energia bisogna immagazzinare nella molla o nel peso perché
esso oscilli per un giorno?
14. Calcolare e fare un grafico dell’andamento dell’energia cinetica di un razzo in funzione del tempo. Calcolare l’energia spesa in funzione del tempo e paragonare con
l’energia cinetica. Commentare.
15. Una molla di costante elastica k, disposta su di un piano orizzontale, ha un’estremità
fissata ad una parete ed è compressa di δ. Si appoggia all’altra estremità della molla
un corpo di massa m e si taglia il filo che tiene compressa la molla. Tutti gli attriti sono trascurabili. In corrispondenza all’istante in cui la lunghezza della molla è quella
di riposo, si calcoli:
a) Il lavoro compiuto dalla molla sul corpo, la velocità di quest’ultimo e la
variazione di energia potenziale della molla
b) Il modulo dell’impulso (quantità di moto) complessivo ceduto dalla molla al
corpo.
16. Un blocco di 2kg striscia lungo un piano inclinato privo di attrito, che forma un angolo di 30° con l’orizzontale. Il blocco parte dalla condizione di quiete all’istante t=0 alla sommità del piano inclinato , ad una quota di 20m sopra il suolo.
a) Quanto vale l’energia potenziale iniziale del blocco rispetto al suolo?
b) Usando le leggi di Newton si trovino lo spazio che il blocco percorre in 1s e la
sua velocità all’istante t=1s
c) Si trovino l’energia cinetica e l’energia potenziale del blocco all’istante t=1s
d) Si trovino l’energia cinetica e la velocità del blocco immediatamente prima che
raggiunga il fondo del piano inclinato
70
Cap. 2 – La dinamica
________________________________________________________________________
17. Un blocco di massa m pari a 2kg viene spinto contro una molla di costante elastica k
pari a 500N/m, accorciandola di x=20cm. Il blocco viene poi lasciato libero e la molla
lo lancia lungo una superficie orizzontale priva di attrito e poi all’insù lungo un piano
inclinato di 45° rispetto all’orizzontale, come in figura. Si determini lo spazio che il
blocco percorre salendo il piano inclinato.
18. Un corpo di massa m1=4kg urta centralmente un secondo corpo, inizialmente in quiete, di massa m2=2kg.
a) L’urto è elastico e l’energia cinetica totale dopo l’urto è: E=60J. Quanto vale
l’energia cinetica iniziale del corpo urtante?
a) E se l’urto fosse stato perfettamente anelastico (cioè se dopo la collisione i due
corpi procedessero insieme, alla stessa velocità V)?
19. Un corpo di 5kg che si muove alla velocità di 4m/s, urta frontalmente contro un corpo
di 10kg che si muove verso di esso alla velocità di 3m/s
a) Se il corpo di 10kg si arresta dopo l’urto, quanto vale la velocità finale del corpo
di 5kg?
b) L’urto è elastico (cioè si conserva l’energia cinetica)?
20. Una palla di stucco con una massa di 50g e una velocità v1=40cm/s compie una collisione centrale e perfettamente anelastica con una palla da biliardo inizialmente ferma
e che ha una massa di 500g. Determinare la velocità comune V delle due palle dopo
l’urto e le rispettive energie cinetiche prima e dopo l’urto.
21. Una pallottola con massa m=4g affonda in un blocco di legno con massa M=3kg appeso ad un filo ed inizialmente fermo. Immediatamente dopo l’urto, la velocità comune a blocco e pallottola è vf=0,5m/s.
a) Quanto valeva la velocità della pallottola prima dell’impatto con il blocco?
b) Di che tipo di urto si tratta?
22. Come è spiegato nel Cap. 5 delle dispense, una stella è una massa di gas “autogravitante” che viene, cioè, compressa dalla sua stessa gravità e si scalda. A temperature
molte elevate, si innescano delle reazione nucleari ed il calore così prodotto bilancia
l’azione della gravità. Una volta che il combustibile nucleare si sia esaurito, la stella
riprende a comprimersi e, se la sua massa è nel campo di variabilità giusto, diviene
una stella di neutroni con un raggio di una decina di km e una densità dell’ordine di
quella di un nucleo. Si sa inoltre che le stelle girano intorno ad un proprio asse: per
esempio il Sole ha un periodo di circa un mese. Immaginiamo allora una stella che
abbia un periodo di rotazione intorno al proprio asse di 30 giorni e che collassi da un
raggio di 106km a 10km: quale sarà la velocità angolare finale?
71
Cap. 2 La Dinamica
23. Calcolare il momento d’inerzia della Terra, assumendo che essa sia una sfera di densità costante.
24. Prendiamo due lamine, di spessore t, una di forma rettangolare (altezza h e larghezza
l), oscillante intorno al punto centrale del lato superiore, ed una a forma di semicerchio di raggio R. Entrambe hanno densità costante pari a ρ e spessore t. Calcolare il
periodo di oscillazione.
25. Calcolare il momento della quantità di moto della Terra (rotazione intorno al proprio
asse e intorno al Sole) nella stessa approssimazione dell’esercizio precedente.
26. Calcolare l’energia cinetica della Terra nel suo moto di rivoluzione intorno al Sole e
nel suo moto di rotazione intorno al proprio asse.
27. Calcolare il momento d’inerzia di un disco di spessore h, raggio R e densità costante
ρ.
28. Calcolare il momento d’inerzia di un corpo costituito da due coni uguali uniti per le
basi di raggio R0.
29. Che possiamo dire della posizione del baricentro del sistema solare, usando i dati nella tabellina?
Corpo celeste
Sole
Distanza dal Sole(km)
0
Massa (kg)
2,0.1030
Mercurio
5,8.107
3,2.1023
Venere
1,1.108
4,9.1024
Terra
1,5.108
6,0.1024
Marte
2,3.108
6,4.1023
Giove
7,8.108
1,9.1027
Saturno
1,4-109
5,7.1026
Urano
2,8.109
8,7.1025
Nettuno
4,5.109
1,0.1026
Plutone
5,9.109
1,1.1024
30. Una girandola è costituita da uno o più razzi attaccati alla periferia di un disco omogeneo di massa m, raggio r e momento d’inerzia I. Il disco può ruotare intorno al suo
asse. Calcolarne la velocità angolare ω.
72
Cap. 2 – La dinamica
________________________________________________________________________
r
31. Consideriamo il sistema in figura. Correlare l’angolo θ con la velocità di rotazione
dell’albero ω.
l
θ
P
ω
84
Po (Polonio) decade, emettendo un nucleo di Elio ( 24 He), o particel32. Un nucleo di 210
la alfa, con 3,5Mev di energia e trasformandosi in Piombo. Calcolare la velocità di
rinculo del nucleo di Piombo.
33. Il Sole emette una quantità d’energia pari a 3,83 ⋅ 10 26 J ogni secondo (vedi pag. 314
delle dispense). Di quanto diminuisce la sua massa ogni anno?
34. Il neutrone è una particella che si trova nei nuclei atomici. Esso ha carica zero e mas∆m
sa appena superiore a quella del protone (
= 0,14% ). Esso è normalmente stabile
m
nei nuclei, ma, in certi nuclei, decade, rilasciando due particelle cariche: un protone e
un elettrone. In questo consiste un decadimento β. Libero, il neutrone decade dopo
circa 887s. Calcolare la quantità di moto dei due prodotti del decadimento supposto il
neutrone a riposo nel sistema del laboratorio.
35. Con riferimento all’esercizio precedente, calcolare la velocità finale dei due prodotti
del decadimento, supponendo che il neutrone iniziale abbia una velocità v = 10 7 m / s
.
36. Se si effettua una misura della quantità di moto dell’elettrone prodotto dal decadimento di un neutrone, nel sistema di riferimento in cui il neutrone è fermo, si osserva che
esso non è fisso, come si è calcolato all’esercizio precedente, ma variabile da decadimento a decadimento. Che ne concludete?
73
Cap. 2 La Dinamica
37. Il blocco A, di massa mA=10kg, è appoggiato su un piano inclinato di un angolo
θ =30° ed è legato, mediante una fune, al blocco B, di massa mB. Affinché il blocco A
si muova di moto uniforme, quale deve essere il valore di mB? Il piano ha un coefficiente di attrito dinamico µd =0,20.
A
B
38. Supponete di avere un tappo metallico appoggiato su un piano che è stato inclinato di
un angolo θ rispetto al piano orizzontale. Dopo vari tentativi, si trova che quando θ è
aumentato fino a 17o, il tappo comincia a scivolare lungo il piano. Qual’è il coefficiente di attrito statico µs tra il tappo ed il piano inclinato? Disegnate in modo chiaro
il diagramma delle forze nel momento in cui il tappo comincia a scivolare.
17o
39. Una slitta di massa m=10kg striscia orizzontalmente alla velocità iniziale v0 di 6m/s.
Se il coefficiente di attrito tra la slitta e la neve è µ=0,16, quanto spazio percorrerà la
slitta strisciando prima di arrestarsi?
40. Per sollevare un pianoforte di 190kg dall’alto di un edificio si usa una fune di massa
trascurabile che passa su di una carrucola, e si lega la fune ad una scrivania di 210kg,
lasciando penzolare il pianoforte alla quota di 5,3m dal suolo. Purtroppo, la scrivania
comincia a strisciare ed il coefficiente di attrito dinamico è µd=0,71.
a) Quanto vale l’accelerazione del pianoforte?
b) Quanto vale la velocità con cui colpisce il suolo?
41. Un blocco di massa m=8kg, posto sopra un piano inclinato di 45°, è soggetto ad una
forza F di 25N applicata ortogonalmente al piano inclinato. I coefficienti di attrito
statico µs e dinamico µd siano rispettivamente 0,30 e 0,22.
74
Cap. 2 – La dinamica
________________________________________________________________________
F
θ =45°
a) Qual’è l’accelerazione del blocco quando si muove verso l’alto?
b) Se il blocco ha una velocità iniziale verso l’alto, esso verrà decelerato fino a
fermarsi. Cosa accade quando il blocco raggiunge il punto più alto?
42. Un blocco pesante fp=50N è trascinato con velocità costante lungo un piano scabro da
una forza f applicata come in figura. Se il coefficiente di attrito tra piano e blocco
vale µd=0,56, che modulo ha la forza f ?
f
θ =40o
fp
43. Una forza F di 400N è necessaria per mettere in moto una scatola di massa m=40kg
sopra un pavimento di calcestruzzo.
a) Qual’è il coefficiente di attrito statico tra la scatola ed il pavimento?
a) Se il coefficiente di attrito dinamico tra una cassa di 20kg ed il pavimento è di
0,30, quale forza orizzontale è necessaria per muovere la cassa a velocità costante sul
pavimento?
Soluzioni
1. Chiamiamo v0 la velocità iniziale con la quale l’oggetto viene lanciato verticalmente.
Se g è l’accelerazione di gravità sulla Terra e g’ quella sulla Luna, vale: g’=g/6. Un corpo
lanciato in alto sulla Terra, si ferma dopo un tempo: t=v0/g, in quanto, se vf è la velocità
finale: v f = 0 = v 0 − gt . Sulla Luna invece salirà per un tempo: t’=v0/g’=6 v0/g. Nel
tempo t il corpo sulla Terra sarà salito di: s = v 0 t −
2
1 2 v0
gt =
. Mentre sulla Luna, avrà
2
2g
percorso una distanza s’, sei volte maggiore: s' = v 0 t '−
2.
La velocità richiesta è legata
v f = v 0 − gt ed anche da:
v 2f
6v 2
1
g ' t ' 2 = 0 = 6s .
2
2g
alla velocità iniziale v0=18m/s dalla relazione:
= v 02 − 2 gs f , essendo sf l’altezza raggiunta. Dunque
75
Cap. 2 La Dinamica
sarà: v f = 18 2 − 2 ⋅ 9,8 ⋅12 = 9,4m / s . Dalla prima relazione scritta al punto precedente, e conoscendo il valore di vf, si ricava:
v 0 − v f 18 − 9,4
t=
=
= 0,88s .
g
9,8
3.
Per il blocco sospeso vale: m1 g = (m1 + m 2 )a . Si noti che l’accelerazione a dei due
corpi deve essere la stessa! Risolvendo, si ha: a =
masse vengono invertite si ottiene invece: a =
m1 g
≈ 2m / s 2 . Se le due
(m1 + m 2 )
m2 g
≈ 8m / s 2 .
(m1 + m 2 )
4.
Calcoliamo la tensione: τ=m(g+a)=8,3N
L’accelerazione massima è: amax=τmax/m –g=4,5m/s2
5.
Dalle dispense abbiamo:
g = 9,78048 ⋅ (1 + 0,0052884sen 2ϕ − 5,9 ⋅10 −6 sen 2 (2ϕ )) = 9,807m / s 2
6.
si vede dalla figura, la velocità angolare della Terra ω (
2π
= 7,3 ⋅10 −5 rad / s ) si può decomporre in una rotazione orizzontale
ω=
86400s
ω H = ω cos λ ed una verticale ωV = ωsenλ . Il piano del pendolo non può ruotare
intorno all’asse orizzontale, ma può ruotare intorno a quello verticale, con periodo
2π
2π
86400s
T=
=
=
. Per esempio, a λ=45° (Udine), il periodo sarà di
ωV ωsenλ
senλ
122188s, ovvero di circa 1 giorno e 10 ore.
L’esperimento fu eseguito da Jean Bernard Leon Foucault (1819-1868) a Parigi, nel
Pantheon, nell’anno 1858, con un pendolo di 67m di lunghezza e del peso di 28kg e
dimostrò ancora una volta la rotazione della Terra.
Apparati più piccoli si trovano in vari musei. Ce n’è, per esempio, uno nell’atrio del
Dipartimento di Fisica dell’Università di Roma “La Sapienza”.
Come
ω
ω
ωV
ωH
pendolo
Terra
76
Terra
λ
pendolo
Cap. 2 – La dinamica
________________________________________________________________________
7.
v
2π
2π
e T=
. Dalla seconda: ω =
= 9,0 ⋅10 −16 rad / s e dalla
r
ω
6,9 ⋅1015 s
v
239km / s
prima: r = =
= 2,6 ⋅1017 km = 27.500anni luce . Per inciso, il siω 9,0 ⋅10 −16 rad / s
stema del baricentro del nostro sistema planetario non è evidentemente un sistema
inerziale, tuttavia l’accelerazione centrifuga in tale sistema è solo:
Si ha: ω =
a c = ω 2 r = 2,1 ⋅10 −10 m / s 2 , da paragonare a quella sulla Terra dovuta al moto diurno di 3,4 ⋅ 10 −2 m / s 2 e di 1,5 ⋅ 10 −4 m / s 2 , dovuta alla rivoluzione intorno al Sole. Un
sistema caratterizzato da un’accelerazione assoluta molto piccola, dunque quasi inerziale.
8.
Il corpo attaccato alla molla acquista la massima velocità quando la molla passa per la
sua posizione di equilibrio. In questo stesso punto, l’accelerazione alla quale è sog1 2
1
2
getto il corpo è nulla. Vale dunque:
. Di conseguenza:
kx max = mv max
2
2
m
x max =
v max . La massima accelerazione si ha quando la molla è nel suo stato di
k
massima estensione (e la velocità del corpo in questo caso è nulla). In questo caso, la
forza esercitata sul corpo è: Fmax = ma max = −kx max . Da questo si può ricavare il vak
della
molla:
lore
della
costante
elastica
k=m
9.
a max
=m
x max
a max
m
v max
k
=
km a max
a
⇒ k = m( max ) 2 .
v max
v max
t
t
) ln( 0 ) , dove il tert0
t0 − t
mine di massa diminuisce e quello di velocità aumenta. Per rispondere, occorre calcolare la derivata prima e verificarne il segno:
La quantità di moto di un razzo è: p = m(t )v(t ) = m 0 v g (1 −
t
t0
t
t t −t
1 dp
1
1
1
= − ln( 0 ) + (1 − )( 0 )
= − ln( 0 ) + =
2
m 0 v g dt
t0
t0 − t
t0
t 0 (t 0 − t )
t0
t0 − t t0
=
t
1
(1 − ln( 0 ))
t0
t0 − t
Il segno è positivo, perché all’inizio il termine logaritmico dà zero e poi cresce. Del
resto esso può diventare maggiore di 1, perché, posto il logaritmo uguale a uno, si ha:
t0
e −1
=e⇒t =
t 0 = 0,63t 0 .
t0 − t
e
77
Cap. 2 La Dinamica
Solo se il combustibile brucia oltre questo tempo, la quantità di moto decresce, mentre la velocità continua ad aumentare. Si veda sotto il grafico della quantità di moto di
un razzo con t0=120s e m0vg=1kgm/s.
quantità di moto di un razzo in funzione del tempo
0,5
.
quantità di moto (kg m/s)
0,4
0,3
0,2
0,1
0,0
0
20
40
60
80
t(s)
10. Con la velocità: V =
m
10
v=
286m / s = 1,43m / s .
M
2000
11. Si consideri il pendolo come un pendolo semplice: T / 2 = π
l
T
⇒ l = ( ) 2 g ≅ 1m .
g
2π
Un numero tondo dovuto al fatto che il quadrato di π è quasi esattamente uguale a g.
Si sarebbe potuto definire il metro come la lunghezza del pendolo semplice che batte
il secondo.
L’energia del peso all’inizio è: U = mgh = 1,5kg ⋅ 9,81m / s 2 ⋅ 0,8m = 11,77 J . Questa
energia sarà stata usata dall’orologio, dopo n =
11,77 J
18 ⋅10
−6
J /s
= 6,5 ⋅10 5 s , cioè una
settimana.
In termini di tempo “vero”, il semiperiodo diventa più lungo e dunque il tempo totale
si allunga con l’inverso della radice di g; però l’energia potenziale del peso si riduce
di più perché diminuisce linearmente con g. In conclusione, il tempo di marcia della
pendola si accorcia.
12. L’energia potenziale massima, pari all’energia totale, si ha al massimo
dell’elongazione ed è pari a: U max = mgl (1 − cos θ max ) = 5,6mJ . La velocità massima
78
Cap. 2 – La dinamica
________________________________________________________________________
si ha per θ = 0° , cioè quando tutta l’energia è cinetica ed è uguale ad Umax, e vale:
v=
2U
= 0,27 m / s .
m
5,6 ⋅10 −3 J
= 72µJ ad oscilla78
zione. Poiché esso ha un periodo di 2s, si hanno 86440/2=43220 oscillazioni del pendolo al giorno, con una perdita di energia totale: 72µJ.43220=3,1J. Ad esempio, un
peso di 1kg dovrà cadere da un’altezza di 31cm, per fornire questa energia.
13. Il pendolo perde mediamente una energia pari a: ∆E =
2
14. L’energia cinetica è: T =
v g2
t
1
1
m(t )v 2 (t ) = m0
(t0 − t ) ln( 0 ) . Assumendo:
2
2
t0
t0 − t
t0=120s, il grafico, in unità arbitrarie (cioè prendendo m 0 v g2 / t 0 = 1 ) dell’energia è
mostrato sotto. La forza esercitata dal motore sul razzo è:
F = ma = m 0 (1 −
vg
t −t
t0
t
)v g 0
= m0
. La forza è dunque costante. Il la2
t0
t 0 (t 0 − t )
t0
vg
v g2
t0
)) . Come si vede l’andamento
t0
t0
t0 − t
del lavoro speso e dell’energia del razzo non sono affatto uguali. Dal grafico si vede
anche che l’energia spesa è ben più grande di quella che troviamo nel razzo. Per capire meglio questo fatto calcoliamo il lavoro effettuato nell’unità di tempo e la corrispondente variazione di energia cinetica.
voro sarà: L = m 0
s = m0
(t − (t − t 0 ) ln(
2
m 0 v g2
t
t
dL
ds
dT 1 m 0 v g
=F
= Fv =
ln( 0 ) =
+
(ln( 0 )) 2 .
dt
dt
t0
t0 − t
dt 2 t 0
t0 − t
Tradotto in parole: l’energia cinetica del razzo (la cui massa è diminuita di dm
nell’intervallo di tempo dt) è aumentata meno di quanto ci si sarebbe aspettato, perché esso ha perso l’energia cinetica relativa alla massa di combustibile espulso in dt.
È facile vedere che:
Se conosciamo m 0 , v g , t 0 per uno specifico razzo, possiamo utilizzare il grafico precedente, moltiplicando le ordinate per il prodotto m 0 v g2 / t 0 e ottenere i valori del lavoro e dell’energia in J. Per esempio, se abbiamo un razzo da 10ton, con i gas di scarico espulsi per 80s circa a 2km/s, alla fine abbiamo speso 333MJ.
79
Cap. 2 La Dinamica
continua: energia cinetica del razzo
tratteggiata: energia spesa
1,0
Energia (unità arbitrarie)
0,8
0,6
0,4
0,2
0,0
0
20
40
60
80
t(s)
15.
a) Il lavoro L effettuato dalla molla è pari alla energia potenziale immagazzinata,
cioè:
L=½ kδ 2. La molla cede alla massa tutta la sua energia potenziale, sotto forma di
energia cinetica: ½ kδ 2=½ mv2. Dunque, la velocità acquistata dalla massa sarà:
k
δ . La variazione di energia potenziale della molla sarà invece pari a:
m
1
∆U = − kδ 2
2
v=
b) L’impulso I fornito dalla molla è: I = mk δ
16. a) Ep=mgh=2.9,8.20 kgm2/s2=392J
b) L’accelerazione è a=g.sen 30° =4,9m/s2. Mentre lo spazio percorso risulta:
1
s = at 2 = 2,45m al tempo t=1s. Otterremo dunque per la velocità
2
v = 2 gh = 2 ⋅ 9,8 ⋅ 1,23 = 4,9m / s .
c) Il calcolo delle energie cinetiche e potenziali dà:
1
E c = mv 2 = 24 J e E p = E p (iniziale) − E c = 368J
2
d) La velocità è v = 2 gh = 2 ⋅ 9,8 ⋅ 20 = 19,8m / s . A questa velocità corrisponde
una energia cinetica Ec=392 J, pari all’energia potenziale iniziale.
17. L’energia potenziale elastica presente all’inizio è pari a:
80
Cap. 2 – La dinamica
________________________________________________________________________
1 2 1
kx = 500 ⋅ (0,2)2 = 10 J . Quando il corpo si arresta sul piano inclinato, tut2
2
ta l’energia potenziale elastica deve essersi trasformata in energia potenziale gravitazionale. Se il corpo si ferma all’altezza h rispetto al suolo, l’energia potenziale gravitazionale sarà: E p = mgh . Ne consegue che tale altezza sarà pari a:
EP =
h=
Ep
=
10 Nm
2 ⋅ 9,8kgm / s 2
a: l=h/sen45o=0,72m
mg
= 0,51m . La distanza l percorsa sul piano inclinato è uguale
18. a) L’energia cinetica iniziale del corpo urtante deve essere pari a 60J in quanto in un
urto perfettamente elastico, l’energia cinetica totale si conserva. Nello stato iniziale,
essendo il secondo corpo inizialmente in quiete, l’energia cinetica totale coincide con
l’energia cinetica del corpo urtante.
b) Se l’urto è perfettamente anelastico, dopo la collisione i due corpi procedono insieme, alla stessa velocità V. Scriveremo dunque, per la conservazione della quantità
(m + m1 )
V . L’energia cinetica del corpo
di moto: m1 v1=( m1+ m2)V. Ovvero: v1 = 2
m1
urtante è:
2
(m + m 2 )
1
1 (m1 + m 2 )
m1 v1 2 =
V2 = 1
60 J = 90 J .
2
2
m1
m1
19. a) Applicando la conservazione dell’impulso si ha:
m1v1 – m2v2=m1v1f + m2v2f
v1f=(m1v1-m2v2)/m1=-2m/s
b) No, perchè l’energia cinetica non si conserva. Quella iniziale è:
1
1
E ci = m1 v12 + m 2 v 22 = 85 J , mentre quella finale risulta pari a:
2
2
1
1
E cf = m1v12f + m 2 v 22 f = 10 J .
2
2
20. Per trovare la velocità finale del sistema dei due corpi, occorre imporre la conservazione della quantità di moto:
m1v1
2000 gcm / s
m1 v1 + m 2 v 2 = (m1 + m 2 )V ⇒ V =
=
= 3,6cm / s .
(m1 + m 2 )
550 g
L’energia cinetica del primo corpo prima dell’urto è pari a:
1
1
E c1 = m1 v12 = 50 ⋅ (40) 2 g ⋅ cm 2 / s 2 = 4 ⋅10 4 g ⋅ cm 2 / s 2 = 4 ⋅10 −3 J
2
2
Mentre quella del secondo corpo è nulla. Dopo l’urto, il sistema dei due corpi procede
con energia cinetica pari a :
1
1
2000 2
E c1+ 2 = ( m1 + m 2 )V 2 = (550) ⋅ (
) ≈ 3636 g ⋅ cm 2 / s 2 = 3,636 ⋅10 −3 J
2
2
550
81
Cap. 2 La Dinamica
21. a) Per la conservazione della quantità di moto si deve avere che: mvi=(m+M)vf
quindi: v i =
(m + M ) v
m
f
=
(4 ⋅10
−3
4 ⋅10
+3
−3
) ⋅ 0,5 = 376m / s .
b) L’urto è perfettamente anelastico.
22. Nella trasformazione da stella normale a stella di neutroni, il momento della quantità
di moto L deve conservarsi:
Lf = I fω f =
R2
2
2
MR 2f ω f = Li = MRi2ω i ⇒ ω f = i2 ω i .
5
5
Rf
Sostituendo i valori dati, si ottiene: ω f =
(10 6 km) 2
(10km)
2
2π
= 2,5 ⋅10 4 rad / s .
30 ⋅ 86400s
Nel 1967, Jocelyn Bell scoprì l’esistenza di oggetti nel cielo che emettevano radiazione nel campo delle onde corte. Questi oggetti furono chiamati “pulsar” per “pulsating star” ed eventualmente identificati con delle stelle di neutroni. Il meccanismo per
cui una stella di neutroni, ruotando, emette onde radio, non può comunque essere discusso qui.
23. Come mostrato nelle dispense a pag. 72 (Cap. 2), il momento d’inerzia di una sfera
2
con densità costante è: I = MR 2 . Sostituendo a M il valore “misurato” da Caven5
dish (pag. 91, Cap. 3) e ad R il valore di 6400km, otteniamo: I=9,79.1037kgm2. Il valore vero è più piccolo: 8,07.1037kgm2, pari all’82% di quello appena calcolato. Del resto, la densità della Terra non può dirsi costante e la parte a densità più alta è vicina
all’asse di rotazione, il che diminuisce il valore del momento d’inerzia (vedere definizione del momento d’inerzia a pag. 74 delle dispense).
24. Lamina rettangolare
82
Cap. 2 – La dinamica
________________________________________________________________________
O
h
t
l
Usiamo l’equazione:
to di inerzia.
M = Iθɺɺk . Calcoliamo il momento delle forze esterne e il momen-
Le coordinate del baricentro a riposo sono:
xB =
1
m
∫
ρtxdxdy =
ρt
m
l
2
∫ ∫
xdx dy =
−
yB =
ρt
m
0
∫
−h
h
ydxdy = −
l
2
ρt
m
0
l
2
h
∫ xdx = 0 e
−
l
2
ρt h2
m
l
2
Dunque la distanza del baricentro dal punto di sospensione è
r=
ρt h 2
m
l
2
=
h
che ri2
mane la stessa quando il sistema oscilla.
La coppia è dunque: M =
1
1
hmg sin β = hmg sin θ
2
2
β = π −θ
83
Cap. 2 La Dinamica
θ
δ
β
P
Il momento d’inerzia rispetto ad A è:
∫
∫
I A = ρ tr 2 dxdy = ρ t ( x 2 + y 2 )dxdy = ρ th
=
x3
3
+l / 2
+ ρ tl
−l / 2
y3
3
h
0
1 l2
= ρ tlh + h 2 =
3 4
m l
2
+h
3 4
2
2
l
Lasciamo allo studioso lettore di dimostrare che I A = I G + m , come richiesto dal
2
m
teorema di Steiner ( IG = (l 2 + h 2 ) ).
12
Il secondo principio dà:
Iθɺɺ = M ⇒
ω=
−1
m l 2
mgh sin θ = + h 2 θɺɺ ⇒ θɺɺ + ω 2θ = 0 con
2
3 4
gh
3 gh
; dunque la solita equazione del pendolo.
= 18 2
2 l2
l + 4h 2
2
+h
4
Vediamo adesso un semicerchio con punto di sospensione nel centro del cerchio.
84
Cap. 2 – La dinamica
________________________________________________________________________
O
r
R
Coordinate del baricentro.
A θ = 0.
xB =
1
m
∫
x ρ tdS =
1
m
∫
x ρ trdrd α =
1
m
∫
2π
ρ tr 2 dr
∫π cos α dα = 0
2π
1
1
2
R3
4
2
yB = ∫ ρ tyrdrdα = ∫ ρ tr dr ∫ sin α dα = − ρ t
=−
R
m
m
m
3
3π
π
Momento del peso applicato al baricentro quando il pendolo è ad un angolo
4
4
M = mg
R sin β = mg
R sin θ
3π
3π
θ:
θ
β
θ
Momento d’inerzia rispetto al punto di sospensione A:
R
∫
I A = tπ ρ r 2 rdr = πρ t
0
R4 1
= mR 2
4
2
Lasciamo allo studioso lettore di calcolare il momento d’inerzia rispetto al baricentro,
usando il teorema di Steiner.
1
4
I θɺɺ = M = mR 2θɺɺ = − mg
R sin θ ⇒ θɺɺ + ω 2θ = 0 con
2
3π
ω=
8g
3πR
85
Cap. 2 La Dinamica
Possiamo anche calcolare il momento delle forze applicate, sommando i momenti infinitesimi di ciascuna areola della lamina:
d M = t ρ gr 2 d α dr sin β ⇒ M = tg ρ
=−
R3
3
π
∫
0
π
sin β =
2
mgR − cos(α − θ )d α =
3π
∫
0
2
4
mgR2 sin θ = −
mgR sin θ
3π
3π
25. Il momento della quantità di moto è dato (vedere pag. 74 delle dispense), in modulo,
da L = Iω = 8,07 ⋅10 37 kgm 2 7,27 ⋅10 −5 rad / s = 5,86 ⋅10 33 kgm 2 s −1 , la sua direzione
è quella dell’asse terrestre ed il verso quello dal polo sud al polo nord. Il momento
della quantità di moto orbitale è: Lo = mvRTS = 2,7 ⋅10 40 kgm 2 / s .
26. L’energia cinetica associata alla rivoluzione intorno al Sole è:
1
Mv 2 = 0,5 ⋅ 5,98 ⋅10 24 kg ⋅ (3 ⋅10 4 m / s ) 2 = 2,69 ⋅10 33 J . Per visualizzare quale
2
enorme quantità d’energia questa sia, paragonare questo numero con quello calcolato
nella soluzione del problema 9 a pag. 82 delle dispense.
T=
L’energia cinetica associata con la rotazione intorno al proprio asse è:
1
T = Iω 2 = 0,5 ⋅ 8,07 ⋅10 37 kgm 2 ⋅ (7,27 ⋅10 −5 rad / s ) 2 = 2,13 ⋅10 29 J .
2
27. Il calcolo segue il solito procedimento. Moltiplichiamo il raggio generico r al quadrato per un elemento di massa infinitesimo e contenuto in una corona circolare di raggio
tra r e r+dr, il cui volume è: dV=2πhrdr e la cui massa infinitesima è:
dm=ρdV=2πρhrdr. Otteniamo così il momento d’inerzia infinitesimo e, integrando
R
R
∫
∫
0
0
da 0 a R, il momento d’inerzia: I = r 2 dm = 2πρh r 3 dr = (πR 2 hρ )
R2 1
= MR 2 .
2
2
28. Prendiamo un volumetto infinitesimo di un cono (il cono si estenda da 0 a +h lungo z
ed abbia un angolo al vertice α) pari a dV=2πrdrdz. La massa è: dm=2πρrdrdz. Il
+h
R( z )
∫ ∫
momento d’inerzia è: I = 2πρ dz
0
=
86
0
+h
∫
r 3dr = 2πρ dz
0
h
R 4 ( z ) πρ
=
( z ⋅ tgα ) 4 dz =
4
2
∫
0
ρR02
h
1
1
3 1
=
πρ ( z ⋅ tgα )5 =
πρR05 = ( πR02 R0 / tgα )
0
2 ⋅ 5tgα
2 ⋅ 5tgα
2 3
5
Cap. 2 – La dinamica
________________________________________________________________________
3 1 2
3
3
( πR0 h) ρR02 = VρR02 = MR02 . Essendo il corpo costituito da due coni,
2⋅5 3
10
10
3
avremo in totale: I = MR 02
5
=
29. Completiamo la tabellina nel modo seguente:
Corpo celeste
Sole
Mercurio
Venere
Terra
Marte
Giove
Saturno
Urano
Nettuno
Plutone
Totale
Distanza (d)
(km)
0
5,8.107
1,1.108
1,5.108
2,3.108
7,8.108
1,4.109
2,8.109
4,5.109
5,9.109
Massa (M)
(kg)
2,0.1030
3,2.1023
4,9.1024
6,0.1024
6,4.1023
1,9.1027
5,7.1026
8,7.1025
1,0.1026
1,1.1024
2,0.1030
Md
(kg.km)
0
1,9.1031
5,4.1032
9,0.1032
1,5.1032
1,5.1036
8,0.10 35
2,4.10 35
4,5.1035
6,5.1033
3,0.1036
Supponiamo che a qualche data, passata o futura, tutti i pianeti si trovino allineati
lungo un’asse X, la cui origine poniamo nel Sole. Non siamo in grado di calcolare
l’esatta posizione del baricentro, perché dovremmo conoscere il segno della coordinata x di ogni pianeta; tuttavia il caso in cui tutti i pianeti siano allineati da un lato del
Sole, dà la massima possibile distanza del baricentro dal centro del Sole. Calcoliamo
tale posizione: x B =
3,0 ⋅10 36 km ⋅ kg
= 1,5 ⋅10 6 km .
2,0 ⋅10 30 kg
Come si vede, una distanza molto più piccola (2,6%) della distanza del più vicino
pianeta dal Sole. Considerando anche che il raggio del Sole è di 7.105km, cioè la metà
della distanza massima appena calcolata, si può sospettare che il baricentro sia
all’interno del volume solare. Sarebbe naturalmente possibile che, nella configurazione immaginata, Giove si trovi da un lato del Sole e tutti gli altri pianeti si trovino
dall’altro lato. In tal caso, come si vede dalla tabella il totale dei prodotti della distanza per la massa darebbe circa zero ed il baricentro si troverebbe decisamente nel Sole.
Un’altra ipotesi possibile è che i pianeti minori diano una somma dei prodotti distanza per massa circa uguale a zero e che la posizione del baricentro sia determinata dal
Sole e da Giove. In tal caso, la posizione del baricentro risulta essere a 7,5 ⋅ 10 5 km
dall’origine, ovvero al bordo del Sole.
30. La forza applicata alla girandola dal razzo a causa dell’espulsione dei gas è:
dP
1
F=
= m 0 v g τ . Per il calcolo della derivata, vedere problema 9 di questo capidt
t0
87
Cap. 2 La Dinamica
tolo. τ è il versore tangente al disco. e per il momento applicato al disco M si ha:
1
dω
r 2 dω
=m
r ×τ = I
. I simboli sono quelli usati nelle dit0
dt
2 dt
spense. In modulo, abbiamo:
M = r × F = m0 v g
1
r
m0 v g
= m ωɺ ⇒ ω =
t0
2
t
m0
∫ mr v
g
0
m
2
2
dt = 0 v g
t . Qui si è assunto che la massa
t0
mr
t0
della girandola sia costante. Altrimenti, più esattamente, si può dire che la massa totale è quella della girandola (fissa) più quella del razzo (variabile):
t
m tot = m + m 0 (1 − ) . Lo studioso lettore può mettere questa funzione (al posto di
t0
m) nell’integrale e provare a calcolarle quest’ultimo. Si può anche supporre che la
massa della girandola sia trascurabile rispetto a quella del razzo.
31. Ciascuno dei due bracci obbliga il pesetto relativo a muoversi solo su di un cerchio di
raggio l e centro in O. La forza peso, verticale, ammette una componente tangente al
cerchio: Pt = mgsenθ . La forza centrifuga, orizzontale, ammette anch’essa una componente
tangente
al
cerchio,
ma
di
verso
opposto:
2
2
Fct = mω r cos θ = mω lsenθ cos θ . L’equilibrio si ha quando le due forze sono
l
Fct
θ
Fc
ω
Pt
P
uguali in valore: mgsenθ = mω 2 lsenθ cos θ ⇒ cos θ =
g
. Da notare che la diverlω 2
genza a ω=0 è solo apparente. L’eguaglianza gsenθ = senθω 2 l cos θ fra le due forze
g
, altrimenti l’unica soluzione è θ=0. Un dispositivo
l
basato su questo disegno veniva usato sui motori a vapore. Per impedire che i giri del
motore eccedessero un valore prefissato, si utilizzava il sollevarsi dei due bracci per
ridurre l’afflusso di vapore ai cilindri. Il dispositivo è noto come regolatore di Watt.
si può realizzare solo se: ω >
88
Cap. 2 – La dinamica
________________________________________________________________________
32. Il Polonio, che ha carica 84, come si vede dal numero in alto a sinistra del simbolo,
decadendo perde 2 cariche e si trasforma nell’elemento di numero atomico 82, il
Piombo appunto. Ammettendo che il nucleo di Polonio fosse inizialmente a riposo,
quando esso decade deve rinculare perché la quantità di moto totale si conservi. La
quantità di moto iniziale era zero prima del decadimento e deve restare zero a decadimento avvenuto. Se la particella alfa ha un’energia cinetica T=3,5MeV, essa deve
avere una quantità di moto:
pα = 2Tmα = mα vα = p Pb = m Pb v Pb ⇒ v Pb =
2Tmα
, con ovvio significato dei
m Pb
simboli. Vettorialmente le due velocità sono di verso, e dunque segno, opposto. Qui
però ci interessa il solo modulo. Sostituendo i valori numeri si ottiene:
v Pb =
2 ⋅ (3,5 ⋅10 6 ⋅1,6 ⋅10 −19 ) J ⋅ (4 ⋅1,67 ⋅10 −27 )kg
206 ⋅1,67 ⋅10 − 27 kg
= 2,51⋅10 5 m / s .
Le particelle alfa prodotte dal Polonio furono utilizzate da E. Rutherford nel suo famoso esperimento con il quale scoprì l’esistenza del nucleo atomico (vedere Cap. 4
delle dispense).
33. Il Sole perde una massa: m =
3,83 ⋅10 26 J
2
c
e, dunque, la massa persa in un anno è:
=
3,83 ⋅10 26 J
9 ⋅10
16
= 0,425 ⋅1010 kg al secondo
M = 365d ⋅ 86400s / d ⋅ 0,42 ⋅1010 kg / s = 1,34 ⋅1017 kg .
34. Se il neutrone è fermo, il sistema del laboratorio coincide con quello del centro di
massa. La conservazione della quantità di moto impone che le due quantità di moto
(dell’elettrone e del protone) siano uguali, abbiano la stessa direzione e verso oppo89
Cap. 2 La Dinamica
sto. In formula: p p = − p e . La conservazione dell’energia totale si può scrivere:
En = E p + Ee
M n c 2 = M p2 c 4 + p 2 c 2 + m 2 c 4 + p 2 c 2
Da
questa
espressione,
si
ricava
quadrando
M c + M c + p c − m c − p c = 2M n c
2 4
n
(M
(M
2 4
p
)
−m )
2 4
2 2
2
e
spostando
+ M p2 − m 2 c 2 = 2 M n M p2c 4 + p 2c 2 quadrando
2
n
+ M p2
2 2
2
n
2
n
+ M p2 − m 2
)
2
c4
di
− 4 M n2 M p2
c2 = p2 .
Da
4M
p=c
che
M −M
2
n
2M n
contengono
2
p
nuovo,
cui
M n4 + M p4 + 2 M n2 M p2 + m 4 − 2m 2 ( M n4 + M p4 ) − 4 M n2 M p2
termini
termini
2 2
si
ha:
− M p2 c 4 = p 2c 2
4 M n2
i
i
M c + p c ovvero:
2 4
p
2
n
4M
(M
2 2
2
n
potenze
della
massa
infine
c 2 = p 2 trascurando
degli
elettroni
si
ha:
≈ ( M n − M p ) c = 1,3MeV / c = 6, 93 ⋅10−13 kgm / s . Le ve-
pc
ve
= 0,93
c =
2 2
p c + m2c4
locità sono:
. Si noti che il protone è
v
pc
pc
−3
p =
≈
= 1,39 ⋅10
c
M pc2
p 2 c 2 + M 2p c 4
non relativistico, mentre l’elettrone è relativistico.
35. Per ottenere le componenti della quantità di moto nel sistema in cui il neutrone “vola”
(il sistema del laboratorio), occorre fare una trasformazione dal sistema CMS (Centro
di Massa) al sistema del laboratorio. Tuttavia la trasformazione dipende dall’angolo
θ * di produzione iniziale. Prendiamo l’asse X nel CMS lungo la direzione di volo del
neutrone e proiettiamo le componenti della velocità lungo tale asse e lungo un altro
asse perpendicolare ad esso (Y). Dato l’angolo di decadimento tali componenti sono:
v ∗xe = v e* cos θ ∗
per l’elettrone, e analoghe per il protone. Il neutrone è relativamen ∗
*
∗
v ye = v e senθ
te lento. Dunque possiamo usare la trasformazione di Galilei e, in genere, le espressioni non relativistiche. Le componenti lungo l’asse Y rimangono immutate dopo la
90
Cap. 2 – La dinamica
________________________________________________________________________
trasformazione
di
riferimento,
quelle
lungo
X
diventano:
*
*
8
∗
7
v xe = v xe cos θ − v N = 2,79 ⋅10 ⋅ cos θ − 10 m / s e similmente per il protone.
v N è la velocità del neutrone. Possiamo ora provare ad applicare la trasformazione di
Lorentz all’elettrone ottenendo:
v *xe − β N c 2,79 ⋅10 8 m / s ⋅ cos θ * − 10 7 m / s
=
v xe =
β
1 − 1,29 ⋅10 −3 cos ϑ *
1 − N v *xe
c
v *ye
2,79 ⋅10 8 m / s ⋅ senθ *
v =
=
ye
β
1,0005 ⋅ (1 − 1,29 ⋅10 −3 cos ϑ * )
γ N 1 − N v *xe
c
Come si vede dai valori numerici, la differenza tra l’espressione relativistica e quella
classica è molto piccola. Notare che le due trasformazioni sono identiche, se v *xe ≈ 0 .
36. Se l’energia dell’elettrone e del protone nel CMS risultano non definite, cioè cambiano da decadimento a decadimento, se ne può dedurre solo che il decadimento coinvolge una terza particella prodotta. Questa particella, non vista, deve per forza avere
carica nulla. Fu E. Fermi a ipotizzare l’esistenza di questa particella, che risultò avere
massa nulla. Fermi battezzò questa particella “neutrino”. Il valore esatto della sua
massa, nulla o molto piccola, costituisce un importante questione perché una massa
piccola, ma non nulla, implicherebbe una massa “oscura” dell’universo molto diversa
con implicazioni cosmologiche rilevanti (vedi Cap. 4).
37. La risultante delle forze su A deve essere nulla. La forza peso agente su A sia:
PA=mAgsen30o=49N. Se la risultante delle forze è nulla deve essere, chiamando τ la
tensione del filo:
3
= 32 N .
2
Questa tensione deve eguagliare la forza peso applicata al corpo B e deve quindi essere: mB=32/9,8=3,3kg
τ=PA-µdmAgcos30o= 49 − 0,20 ⋅10 ⋅ 9,8 ⋅
38.
Il tappo può cominciare a scivolare quando la forza di attrito statico raggiunge il
suo massimo valore e questo valore eguaglia quello della forza peso applicata al
tappo. Si deve avere: mgsen17 o = µ d mg cos17 o . Quindi:
µd =
sen17 o
cos17
o
=
0,29
≅ 0,3.
0,96
39. Tenendo conto che si tratta di un moto uniformemente decelerato (dove la decelerazione a=gµ è quella dovuta alla forza di attrito), lo spazio percorso e la velocità dalla
91
Cap. 2 La Dinamica
1 2
at e v = v 0 − at . Il tempo al
2
quale la slitta si arresta (v=0 nella seconda equazione scritta) è: t=v0/gµ.. Durante
questo
tempo
la
slitta
avrà
percorso
uno
spazio
pari
a:
2
v 02 1
v 02
1 v0
36
s=
− gµ 2 2 =
=
= 11,5m.
gµ 2
2 gµ 2 ⋅ 9,8 ⋅ 0,16
g µ
slitta al tempo t possono essere scritti come: s = v 0 t −
40. Siano m1 la massa del pianoforte e m2 la massa della scrivania. La seconda legge
di Newton applicata a questi due corpi si può scrivere per il pianoforte come:
- m1 g+τ1=- m1 a1 (componente y) dove τ1 è la tensione del filo al contatto con il pianoforte. Per la scrivania, essendo N la forza normale: - m2g+N=0 (componente y) e
τ2 - µdN=m2 a2 (componente x), dove τ2 è la tensione del filo al contatto con la scrivania. Risolvendo rispetto a N si ottiene:
τ2 - µdm2g=m2 a2
Poiché le due masse sono legate da una fune inestensibile, deve essere: a2=a=a1
Ed essendo la fune di massa trascurabile e passando attraverso una carrucola senza attrito: τ2=τ= τ 1. Quindi le equazioni diventano:
- m1 g+τ=- m1 a
τ - µdm2g=m2 a
(m − µ d m 2 )g
Da cui : a = 1
= 1,0m / s 2 .
m1 + m 2
b) Il pianoforte cade percorrendo uno spazio h=5,3m. Quindi colpirà il suolo alla
velocità: v = 2ah = 3,3m / s .
41. a) Si indichi con P la forza peso alla quale è soggetto il blocco. Allora: P = mg .
La componente della forza peso parallela al piano inclinato è: P//=P.sen45o
mentre la componente normale è: P|=P.cos45o. La forza F agisce unicamente nella direzione normale. La forza di attrito f è proporzionale al modulo della risultante N delle
forze normali, cioè: f=µdN=µd( P| +F). La seconda equazione di Newton si può scrivere come: (P// + f)=ma. L’accelerazione risultante sarà:
µd
P// 0,22
=
( 25 + 8 ⋅ 9,8 ⋅ cos 45 o ) + 9,8 ⋅ sen 45 o = 9,1m / s 2
m
m
8
e sarà diretta verso il basso.
b) Una volta fermo, la componente della forza peso parallela al piano inclinato tende
a portare l’oggetto verso il basso. Ma la forza di attrito cambia verso rispetto al caso
precedente. Poichè quest’ultima presenta un modulo inferiore rispetto alla componente parallela della forza peso, allora il corpo ridiscende lungo il piano inclinato con una
accellerazione a’ di modulo inferiore alla precedente.
a=
92
( F + P| ) +
Cap. 2 – La dinamica
________________________________________________________________________
42. Se il blocco si muove di velocità costante, la sua accelerazione a deve essere nulla,
ovvero
le
forze
applicate
devono
essere
uguali:
ma = 0 = f cos 40 o − µ ( f p − fsen 40°) . Si avrà quindi:
f =
µf p
cos 40 + µsen 40°
o
=
50 N ⋅ 0,56
= 24,86 N .
1,126
43. a) Per trovare il coefficiente di attrito statico, occorre eguagliare la forza che spinge
la scatola, alla forza di attrito che oppone resistenza al moto: F=µmg, dove µ è il
coefficiente di attrito statico. Da questa eguaglianza risulta che
F
400 N
µ=
=
= 1,02 .
mg 40kg ⋅ 9,8m / s 2
b) Si chiami µd il coefficiente di attrito dinamico. Allora deve essere:
F=µd gm=20.9,8m/s2.0,30kg=58,8N
93