PROGETTAZIONE E REALIZZAZIONE DI UN SISTEMA CAMBIO
ELETTROATTUATO PER KART DA COMPETIZIONE
CAPPUCCINO, Gregorio (1); CUGLIARI, Filippo (2); GIAMPA’, Francescantonio (2);
MUZZUPAPPA, Maurizio (2);
(1)
Università della Calabria, Italia
Facoltà di Ingegneria, Dipartimento di Elettronica Informatica e Sistemistica
[email protected]
(2)
Università della Calabria, Italia
Facoltà di Ingegneria, Dipartimento di Meccanica
[email protected]
SOMMARIO
In questo articolo viene presentato il processo di prototipazione di un cambio elettroattuato per kart
ispirato alle tecnologie utilizzate in Formula 1. Il sistema è costituito da un attuatore elettrico che
agisce direttamente sui leveraggi del cambio ed è comandato da due tasti posti sulle razze del
volante. L’attuatore è gestito da una scheda elettronica cui è demandato il controllo della cambiata
ed in particolare il controllo del tempo di azionamento del cambio e di interruzione
dell’alimentazione della candela (fondamentale per effettuare una cambiata più graduale). Alla
progettazione del dispositivo, basata su dati sperimentali rilevati in pista con apposita telemetria, è
seguita la prototipazione fisica. E’ attualmente in atto la taratura al banco del sistema.
Parole chiave: Kart, cambio elettroattuato
ABSTRACT
In this paper, a new system of electroactuated gear for kart is presented. Operating on two keys
placed on the steering wheel, the driver activates the system that, inspired on the Formula 1
technologies, permits to change the gear by means of an electric actuator that acts on the gear lever.
The system is managed by an electronic card which controls the action of the electric actuator in the
times and more opportune ways to get a rapid change gear without obstacles. Besides, the electronic
card operates the function of disable temporarily the lighting of the spark in order to obtain a more
gradual gear change. The development of the system, that is based on experimental data taken by
means of telemetry, has been followed by the physical prototype. At the moment, the bench test is
being carried out.
Key words: Kart, electroactuated gear.
Gruppo tematico: Miscellanea
1. Introduzione
Se agli albori della sua storia, il kart era costruito racimolando pezzi da elettrodomestici
abbandonati in garage, in seguito, grazie agli investimenti di privati, di aziende del settore e di
appassionati, questo veicolo si è evoluto da mezzo creato per puro svago a veicolo da competizione
vero e proprio. Il cosiddetto karting è diventato uno sport a tutti gli effetti ed è considerato
addirittura propedeutico alle formule di competizione automobilistiche superiori [1].
Sebbene gli attuali kart da competizione siano veicoli sufficientemente evoluti, bisogna
considerare che la loro progettazione e messa a punto è tuttora basata essenzialmente sulla
sperimentazione. Infatti, lo stato dell’arte di questi veicoli è il frutto di una dura evoluzione naturale
della “specie”. Basti pensare, per esempio, alle forme dei telai attuali: essi rappresentano gli
“individui” che hanno resistito alla selezione di anni di sperimentazione e prove in pista. Ancora
oggi, sono pochi i costruttori o i team, che gestiscono i kart sulle piste, che si avvalgono della
consulenza di ingegneri.
In questo settore, per così dire “snobbato” dalla ricerca, si colloca il presente lavoro. In
particolare viene presentata l’attività di prototipazione di un cambio elettroattuato per kart ispirato
alle tecnologie utilizzate in Formula 1. Il sistema è costituito da un attuatore elettrico che agisce
direttamente sui leveraggi del cambio ed è comandato da due tasti posti sulle razze del volante.
L’attuatore è gestito da una scheda elettronica cui è demandato il controllo della cambiata ed in
particolare il controllo del tempo di azionamento del cambio e del tempo di interruzione
dell’alimentazione della candela. I benefici ottenibili da questa soluzione sono molteplici:
1. maggiore rapidità nell’innesto delle marce (con indubbi vantaggi in accelerazione),
2. inserimento delle marce senza togliere le mani dal volante (con la possibilità di effettuare la
cambiata anche durante la percorrenza di una curva),
3. assenza di sforzo fisico da parte del pilota (nel sistema tradizionale il pilota deve esercitare
un discreto sforzo sulla leva del cambio).
Nel presente lavoro viene descritto il processo di prototipazione di tale dispositivo che si è
articolato in diverse fasi: analisi dei dati sperimentali acquisiti sul kart con il cambio tradizionale
mediante sistema di telemetria; prototipazione virtuale del nuovo dispositivo e simulazione della
cinematica; progettazione e realizzazione dell’elettronica di controllo; realizzazione fisica del
prototipo. E’ attualmente in atto una serie di prove su banco per la taratura del sistema; a questa fase
seguirà, nell’immediato futuro, una serie di test in pista per effettuare il confronto con il cambio
tradizionale.
2. Analisi dei dati sperimentali
L’idea di partenza per la progettazione di un cambio elettroattuato su un kart nasce da alcune
semplici osservazioni. Attualmente, l’azionamento del cambio tradizionale richiede al pilota un
notevole impegno, che può essere fonte di distrazione dalla guida. In particolare, quando si cambia
marcia occorre togliere una mano dal volante ed esercitare un certo sforzo sulla leva. Questo
costringe il pilota ad anticipare o a ritardare la cambiata e ad evitare di utilizzare il cambio durante
la percorrenza di una curva. Inoltre, per inserire una marcia, il pilota deve effettuare due differenti
azioni: il rilascio dell’acceleratore e l’inserimento della marcia. Se tali gesti non sono ben coordinati
si hanno eccessive perdite di giri del motore con conseguenti ripercussioni negative sulle
prestazioni in pista.
Il processo di prototipazione del dispositivo ha preso il via con una campagna di acquisizione
dati in pista. Avvalendosi della consulenza di un pilota professionista, si è proceduto alla raccolta di
una serie di dati sperimentali che sono stati utilizzati successivamente per la taratura del sistema
proposto. I dati sono stati rilevati sul kart in dotazione al Dipartimento di Meccanica dell’Università
della Calabria, che nella fattispecie è un Kali 125 motorizzato Gilera. Il sistema di acquisizione dati
e telemetria utilizzato è il MyChron 3 Gold della AiMSports [2]. In figura 1 sono rispettivamente
indicate due delle tre unità di cui si compone il sistema MyChron (la terza unità, non in figura, è
posizionata a bordo pista per il rilevamento dei tempi).
b)
a)
Figura 1. Il sistema di rilevamento dati Mychron a) la centralina, b) il display.
La centralina è in grado di memorizzare i dati provenienti da più sensori con una frequenza di
campionamento di 10Hz. I vari sensori, corrispondenti ciascuno ad un canale, forniscono diversi
dati quali: il numero di giri del motore, la velocità del veicolo, le sue accelerazioni (sia longitudinali
che trasversali) e tre diversi valori di temperatura misurati in diversi punti del motore e dello
scarico.
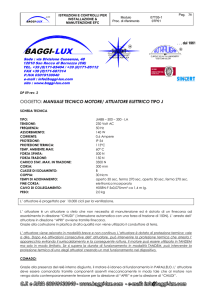
Oltre ai canali reali, è possibile disporre dei cosiddetti canali matematici che, implementando
particolari funzioni dipendenti dai canali reali, permettono di estrapolare dal sistema altri dati molto
utili: un tipico esempio di canale matematico è quello relativo al rapporto inserito. A titolo di
esempio, è di seguito riportata una schermata del software di elaborazione dati impiegato: Race
Studio Analysis 2.
Figura 2. Schermata del software di analisi dei dati: in alto e in rosso le curve di giri motore, in mezzo e in
verde le velocità e in basso e in blu la marcia inserita.
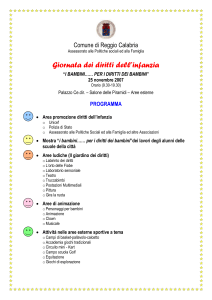
L’analisi dei dati rilevati in pista, ha permesso di determinare i tempi di cambiata e le relative
cadute di giri. Nel grafico di figura 3, sono riepilogate, a titolo esemplificativo, queste informazioni
per alcune prove di cambio marcia dal 4° rapporto al 5°.
Si può facilmente notare come, nonostante il valore medio dei tempi di cambiata sia
relativamente basso, (circa 0.28 secondi), i tempi delle singole cambiate presentano una dispersione
elevata (da 0.2 a 0.6 secondi). La causa di questa dispersione è legata al fatto che la cambiata è
un’operazione complessa che richiede un elevato sincronismo tra la mano che deve azionare la leva
del cambio e il piede che deve prima lasciare l’acceleratore per permettere l’inserimento della
marcia e poi riaccelerare una volta inserita la stessa.
Lo stesso grafico evidenzia, inoltre, le cadute di giri che si verificano nel passaggio dal
rapporto inferiore a quello superiore. Anche in questo caso, pur con lo stesso pilota alla guida, a
fronte di un valore medio di perdita di giri di circa 1600 rpm, si registra una elevata dispersione dei
dati che risulta essere una delle cause principali ad incidere sulle prestazione sul giro.
Figura 3. Grafico caduta giri e tempo cambiata nel passaggio 4a–5a (cambio manuale)
Da queste osservazioni e dai dati rilevati in pista sono state definite le specifiche del sistema. In
particolare, si è stabilito di:
garantire un tempo di cambiata costante nel tempo e prossimo ai valori medi di cambiata
ottenuti dal pilota professionista (circa 0.28 sec);
mantenere la caduta di giri prossima al valore minimo fatto registrare durante le prove in
pista con il cambio tradizionale (circa 800 rpm).
3. La prototipazione del dispositivo
I vincoli che ci si è posti per la il nuovo sistema sono sintetizzati in tabella 1.
costo di realizzazione (euro)
dimensioni massime (LxHxP - mm)
< 200
200 x 100 x 100
tempi di cambiata (sec.)
0.20 – 0.30
cadute di giri ad ogni cambiata (rpm)
800 – 1.000
Tabella 1. Specifiche di progetto
Un’ulteriore specifica da soddisfare è stata quella di garantire il montaggio del dispositivo su
qualsiasi tipo di kart.
Prima di definire la soluzione finale sono state valutate diverse alternative progettuali. I sistemi
elettroidraulici sono stati scartati per la complessità meccanica, per gli eccessivi ingombri e i costi
elevati. Anche gli attuatori elettromagnetici lineari, pur garantendo un basso costo di acquisto ed
un’elevata velocità di azionamento, sono stati scartati. Tale soluzione avrebbe comportato
l’adozione di un accumulatore molto grande e pesante per garantire il carico di corrente necessario
al funzionamento di due attuatori. I comuni attuatori elettromagnetici, infatti, sono a singolo effetto
e ciò avrebbe richiesto, per il nostro caso, la necessità di installarne due (uno per la scalata e uno per
la salita di rapporto). D’altra parte, gli attuatori elettromagnetici a doppio effetto sono molto costosi
e, comunque, caratterizzati da una elevata potenza assorbita. Infine, anche gli attuatori lineari a vite
senza fine e circolazione di sfere sono stati scartati perché troppo lenti ed ingombranti.
La scelta finale è perciò ricaduta su un attuatore a rotazione realizzato mediante un motore
elettrico a 12V ad alta potenza, accoppiato ad un riduttore epicicloidale per ottenerne le corrette
caratteristiche di coppia e velocità.
Per tutte le soluzioni ipotizzate, si è comunque sempre pensato di agire sui leveraggi esterni del
cambio in modo da costituire, come da specifiche, un sistema facilmente adattabile “after market” e
senza troppe modifiche, su qualsiasi kart da 125cc (gli unici dotati di cambio) [3].
Le caratteristiche tecniche salienti del motore sono mostrate in tabella 2.
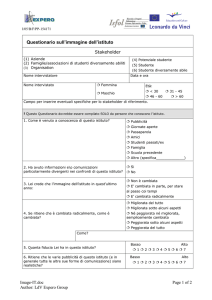
Ampio uso è stato fatto di software per la prototipazione virtuale del sistema proposto. In
particolare, il dispositivo è stata modellato con l’ausilio del software Pro/E nella versione Wildfire2
della PTC©, ed è stato verificato il corretto cinematismo dei vari rinvii e leveraggi sui quali agisce
l’attuatore elettrico con il software Mechanism sempre della PTC© [4]. Nella figura 4 è mostrato il
modello solido della soluzione finale prescelta.
tensione di alimentazione
12v
potenza di cortocircuito
500W
Peso
350g
lunghezza compreso il riduttore
Potenza a regime
135mm.
120W
Tabella 2. Caratteristiche tecniche del motore prescelto.
La collocazione dell’attuatore davanti al propulsore non comporta alcun problema di ingombro
con nessun altro componente del kart e risulta agevole per il suo collegamento con i leveraggi del
cambio. Parimenti, la disposizione della scheda elettronica di controllo sul retro del volante non
comporta problemi di compatibilità con altri organi.
Figura 4. Modello solido della soluzione proposta
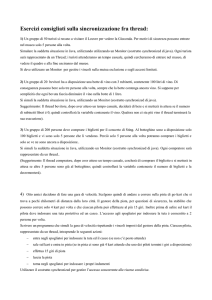
Nelle seguenti immagini è infine mostrato l’attuatore elettrico, completo di riduttore
epicicloidale, collocato sul kart e collegato ai leveraggi esterni del cambio.
Figura 5. L’attuatore elettrico collocato sul kart
L’aggravio di peso di tutto il sistema è limitato ed è in parte compensato dall’eliminazione
della leva per l’azionamento manuale del cambio e per la semplificazione dei leveraggi esterni. In
ogni caso occorre considerare che i kart sono generalmente sottopeso e devono pertanto essere
zavorrati di qualche chilo per prendere parte alle competizioni. Ciò considerato, anche la presenza
di un eventuale piccolo accumulatore per l’alimentazione dell’attuatore del cambio a motore spento
e per sopperire alla limitata potenza elettrica dell’alternatore montato sul motore, non costituisce un
limite del sistema.
3.1. Elettronica di controllo e logica di funzionamento
Il sistema elettronico, come visibile nello schema a blocchi di figura 6, è costituito da una
sezione di alimentazione, dalla sezione di logica e supervisione e dalla sezione di potenza.
Figura 6. Schema a blocchi del sistema elettronico
Il blocco di alimentazione ha il compito di mantenere stabile la tensione di alimentazione della
sezione di controllo, anche nel caso di repentini abbassamenti della tensione di alimentazione in
caso di blocco degli attuatori meccanici, durante il funzionamento degli attuatori e nel caso di
batteria scarica.
Il cuore della sezione elettronica di controllo è realizzata mediante un microcontrollore CMOS
a 8-bit a basso consumo ATMEL, basato su architettura AVR RISC: l’ATmega8535. Il dispositivo
offre, oltre alle funzionalità di base di un normale microcontroller di fascia medio-alta, otto canali
di input analogico che rendono possibile il monitoraggio diretto di altrettanti sensori lineari e
modalità di congelamento degli stati, opzione utile in caso di funzionamento anomalo degli attuatori
o di guasti alla sezione di alimentazione. Il microcontrollore dispone al suo interno, inoltre, di un
comparatore analogico a soglia, componente che viene utilizzato per il controllo della corrente
assorbita dagli attuatori. Le istruzioni relative al flusso di controllo, riportato schematicamente sotto
forma di automa a stati finiti in figura 7, sono memorizzate direttamente all’interno del
microcontrollore e sono facilmente modificabili direttamente “on board”, senza cioè la rimozione
del chip dalla scheda, funzionalità estremamente utile per upgrade o correzioni a run time.
Figura 7. Automa a stadi finiti
Le uscite dell’ATmega8535 forniscono i segnali pilota che, amplificati in corrente dallo stadio
di potenza, comandano i due attuatori meccanici agenti sul leveraggio. La corrente assorbita dagli
attuatori viene monitorata da un trasduttore (I sensing) per dare la possibilità al microcontrollore di
stabilire lo stato attuale degli stessi (blocco, movimento, finecorsa).
Come visibile in figura 7, il sistema permane nello stato di riposo (“marcia”) fin quando non
sopraggiunge il comando di cambiata. In tale stato l’unico segnale attivo è quello di consenso al
sistema ad alta tensione per l’accensione della candela (“spark on”).
Nel caso di comando di cambiata “up”, cioè in corrispondenza di una richiesta di aumento del
valore del rapporto inserito, il sistema passa nello stato di “wait”, disabilitando l’accensione della
candela. La permanenza in tale stato è condizionata esclusivamente dal tempo impostato dall’utente
finale. Una volta passato un tempo prefissato dalla disattivazione della candela (al fine di far
scendere il numero di giri del motore in misura opportuna per ottenere una cambiata senza
impuntamenti) si passa allo stato di “attuatore FW”, in corrispondenza del quale viene attivato il
motore dell’attuatore elettromeccanico. Tale stato di attivazione viene mantenuto o sino a quando,
eseguendo la corsa massima, ed inserendo quindi il rapporto superiore, si raggiunge il finecorsa
meccanico che a sua volta attiva il segnale di “finecorsa OK”. A questo punto il sistema passa nello
stato di “attuatore REW”, durante il quale viene ridato il consenso al circuito di accensione della
candela ed il motore dell’attuatore elettromeccanico viene alimentato in maniera da invertire il
verso di rotazione e quindi riportare il leveraggio del cambio in posizione centrata di attesa.
Nel caso in cui dovesse subentrare una condizione di sovracorrente, relativa o ad un
malfunzionamento del sistema attuatore o ad un blocco meccanico del sistema
attuatore/leveraggio/cambio, il sistema è in grado di resettarsi attivando ancora l’attuatore in senso
inverso, mediante ancora il passaggio nello stato di “attuatore REW”.
Nel caso di comando di cambiata “down”, cioè in corrispondenza di una richiesta di scalata, le
operazioni sono pressoché analoghe al caso precedente, tranne per il fatto che non viene disabilitata
l’accensione della candela e il senso di rotazione del motore degli elettroattuatori viene invertito. In
questo caso non è necessario disabilitare l’accensione della candela in quanto, in scalata, si è già in
rilascio e quindi il numero di giri del motore è di per se in diminuizione.
La corretta calibrazione dei tempi di disattivazione dell’accensione e di azionamento
dell’attuatore di comando cambio, consente di effettuare la cambiata con la massima gradualità
possibile e senza impuntamenti. Per meglio comprendere l’importanza di questo aspetto, si ricorda
che sui kart da competizione, nelle cambiate, non si fa uso della frizione. Infatti, un pilota esperto
riesce ad effettuare cambiate regolari “ad orecchio”, cioè sentendo i giri del motore, sa intervenire
sulla leva del cambio al momento opportuno per inserire il rapporto desiderato senza usare la
frizione il cui uso risulterebbe dispendioso in termini di tempi di cambiata e quindi di tempi sul
giro.
4. Conclusioni e sviluppi futuri
In questo lavoro è stato presentato un innovativo sistema di cambio elettroattuato per kart da
competizione. Tale sistema permette innanzitutto di annullare gli sforzi richiesti al pilota in fase di
inserimento delle marce rispetto al sistema manuale tradizionale. La possibilità di agire utilizzando
due tasti posti sulle razze del volante, consente inoltre l’azionamento del cambio anche durante la
percorrenza di una curva. Il cambio elettroattuato garantisce cambiate sempre ottimali mantenendo
costante la velocità di inserimento della marcia e la caduta di giri del motore. Tali peculiarità
dovrebbero garantire migliori prestazioni sul giro.
Il nuovo sistema, progettato sulla base di dati sperimentali acquisiti in pista, è stato realizzato in
forma di prototipo ed è stato adottato su un kart da competizione 125cc. Allo stadio attuale, si sta
effettuando la taratura al banco della scheda elettronica di controllo per determinare i tempi ottimali
in grado di garantire inserimenti di marce il più rapidi possibili e senza impuntamenti. Ultimata la
taratura, si procederà con lo svolgimento di nuove prove sperimentali in pista. Il confronto dei
nuovi rilevamenti con i dati sperimentali precedentemente acquisiti sul cambio tradizionale,
consentiranno di ottenere nuove informazioni sulla base delle quali ottimizzare il sistema.
Il dispositivo proposto rispetta naturalmente tutti i regolamenti tecnici per poter essere
omologato e quindi impiegato in gare titolate.
Il tutto è stato progettato in modo tale da non richiedere modifiche sul kart e costituire, quindi,
un facile kit da montare “after-market”.
Bibliografia
[1]
NATOLI, Marco. Il manuale del kart. 2ª ed. Archimede Editore, Milano, 1999.
[2]
AimSports, http://www.aimsports.com
[3]
TERRANOVA,A.
Il
cambio
meccanico
nei
veicoli
http://www.mecc.unipd.it/~cos/dinamoto/ilcambio/cambio.htm
[4]
PTC, http://www.ptc.com
a
due
ruote.