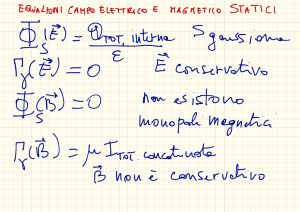
")
MATERIALI
PIEZOELETTRICI (piezo = pressione)
La piezoelettricità è la proprietà manifestata da alcuni cristalli di caricarsi elettrica‐
mente se vengono deformati o sollecitati meccanicamente (effetto piezoelettrico diretto). Viceversa, se tali cristalli vengono attraversati da una corrente elettrica o esposti ad un campo elettrico, allora manifestano una deformazione (effetto piezoelettrico inverso). I materiali piezoelettrici vengono pertanto utilizzati per convertire energia elettrica in energia meccanica (come attuatori) e viceversa (come sensori). STRUTTURA CRISTALLINA
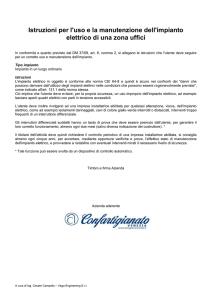
Alcuni materiali in natura possiedono tale proprietà (quarzo, tormalina). Nei moderni dispositivi si utilizzano cristalli artificiali (sale di Rochelle, solfato di litio) e i piezoceramici (titanato di bario, titanato di piombo, PZT) dapprima sottoposti ad un processo di polarizzazione (poling) Le proprietà piezoelettriche sono dovute alla struttura cristallina di tali materiali 1) Prima che il materiale diventi piezoelettrico la sua struttura cristallina è formata da una cella elementare cubica con un atomo centrale di Titanio o Zirconio. Data la simmetria della disposizione atomica, in assenza di sollecitazioni la struttura non presenta polarità di cariche elettriche. 2) Sotto l’azione di un campo elettrico o di una solleci‐
tazione meccanica, l’atomo centrale si sposta dal centro causando uno squilibrio nelle cariche, che dà origine alla formazione di un dipolo elettrico POLARIZZAZIONE
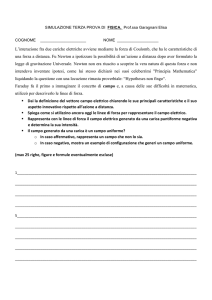
Il processo di polarizzazione consiste nell’orientazione dei dipoli elettrici all’interno del materiale e si effettua attraverso le seguenti fasi 1) il materiale viene riscaldato ad una temperatura prossima a quella di Curie 2) si applica un intenso campo elettrico in modo da allineare i domini di polarizzazione nel materiale secondo la direzione del campo applicato 3) raffreddando il materiale l’orientazione dei domini viene bloccata e permane anche dopo la rimozione del campo elettrico. Il risultato del processo è una polarizzazione residua con i dipoli orientati nella direzione del campo elettrico applicato 1) 2) 3) VANTAGGI E LIMITI OPERATIVI
Caratteristiche dei materiali piezoceramici: ♦ elevata efficienza di trasformazione elettro‐meccanica ♦ buona lavorabilità e ampia tipologia di forme ottenibili Le limitazioni al loro utilizzo sono dovute a ♦ depolarizzazione ♦ invecchiamento ♦ isteresi Le proprietà piezoelettriche decadono velocemente in presenza di forti campi elettrici di direzione opposta al campo polarizzante o alternati, di elevate sollecitazioni meccaniche e di temperature superiori alla temperatura di Curie* *temperatura alla quale si verifica una transizione di fase nella struttura cristallina, da asimmetrica a simmetrica, che determina la perdita delle proprietà piezo‐
elettriche BUTTERFLY LOOP
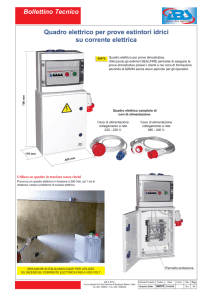
ε
‐Ec
ε
Ec
Ec = campo elettrico coercitivo 0‐1‐2 Applicando un campo elettrico E nella direzione di polarizzazione il materiale si allunga (ɛ > 0) 0‐3‐4 Se si inverte il campo elettrico il materiale dapprima si contrae (ɛ < 0), finché non raggiunge un’intensità ‐Ec sufficiente a far invertire la direzione di polarizzazione del materiale 4‐5 Per E < ‐Ec l’atomo centrale si sposta dalla parte opposta, variando il verso del dipolo, e il materiale riprende ad allungarsi In realtà, i materiali piezoelettrici evidenziano comportamenti non lineari e isteresi ISTERESI
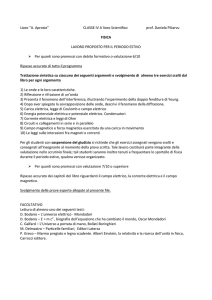
P
E
‐Ec Ec
Per valori elevati del campo elettrico il legame tra E e P non è lineare e la polarizzazione non si annulla quando viene rimosso il campo elettrico Pr = polarizzazione residua Ps = polarizzazione di saturazione Le equazioni che descrivono il fenomeno piezoelettrico esprimono l’interazione tra le grandezze elettriche e meccaniche, e vengono ricavate sia dalle equazioni di Maxwell che dalla meccanica dei continui deformabili EFFETTO PIEZOELETTRICO DIRETTO E INVERSO
Effetto piezoelettrico diretto F
Si consideri un cilindro di materiale piezoelettrico di lunghezza L e sezione A posto tra due elettrodi in corto. Applicando una forza F si ha (σ = F/A, ε = ΔL/L, E = 0): L
ε = σ / Y dove F
D = d σ Y modulo elastico di Young “in corto” [N/m2] d costante di deformazione piezoelettrica [C/N] D spostamento elettrico o densità di carica [C/m2] Effetto piezoelettrico inverso Applicando un campo elettrico E = V/L si ha: L
ε = d E D = e E dove e costante di permettività dielettrica [C2/Nm] PIEZOELASTICITÀ LINEARE 1D
Il legame costitutivo 1D in forma diretta e in forma inversa risulta ⎛ ε ⎞ ⎡1 / Y
⎜ ⎟=⎢
⎝D⎠ ⎣ d
d ⎤⎛ σ ⎞
− Yd / e ⎤⎛ ε ⎞
⎛σ⎞
1 ⎡ Y
⎜ ⎟ ⎜ ⎟ =
⎜ ⎟ 2 ⎢
⎥
⎥
e ⎦⎝ E ⎠
1 / e ⎦⎝ D ⎠
⎝ E ⎠ 1 − k ⎣− Yd / e
la costante di deformazione piezoelettrica d è responsabile dell’accoppiamento elettromeccanico ed è proporzionale alla capacità del materiale di convertire energia meccanica in energia elettrica e viceversa. F
Effettuando una prova meccanica di trazione a circuito aperto non si ha spostamento elettrico, per cui D = 0. In tal caso σ = L
F
e
Y
*
ε = ε = Y
ε 2
2
e /Y − d
1−k
k2
d
E = − ε ε = −
e /Y − d 2
d (1 − k 2 )
dove k = d Y / e è il coefficiente di accoppiamento piezoelettrico (0 < k < 1) Y* = Y/(1 − k2) è il modulo elastico a circuito aperto Si osservi che Y* > Y e la differenza dipende dal coefficiente di accoppiamento k PIEZOELASTICITÀ LINEARE 3D
σ = ⎡ σ11 ⎤
⎢σ ⎥
⎢ 22 ⎥
⎢σ 33 ⎥
⎥ ⎢
σ
23
⎥
⎢
⎢ σ13 ⎥
⎥
⎢
⎣⎢σ12 ⎦⎥
ε = ⎡ ε11 ⎤
⎢ε ⎥
⎢ 22 ⎥
⎢ ε 33 ⎥
⎥ ⎢
2
ε
23
⎥
⎢
⎢2 ε13 ⎥
⎥
⎢
⎣⎢2 ε12 ⎦⎥
D =
⎡ D1 ⎤
⎢⎢D2 ⎥⎥ ⎢⎣D3 ⎥⎦
E =
⎡ E1 ⎤
⎢⎢E2 ⎥⎥ ⎢⎣E3 ⎥⎦
U =
⎡u1 ⎤
⎢⎢u2 ⎥⎥ ⎢⎣u3 ⎥⎦
Φ σ tensioni
ε deformazioni D spostamento elettrico E campo elettrico U spostamento Φ potenziale elettrico Per valori piccoli di ε ed E il comportamento elettromeccanico di un materiale piezoelettrico si può descrivere attraverso delle equazioni costitutive lineari, derivate da una funzione energia potenziale ϕ(ε, E) quadratica nelle variabili ε e E: c matrice di rigidezza elastica (6x6) 1
1
ε
ϕ(ε, E) = ε ⋅ c ε − E ⋅ h ε − E ⋅ e E h matrice piezoelettrica (3x6) 2
2
eε matrice di permittività ad ε cost (3x3) Il 1° e il 3° termine sono l’energia di deformazione elastica e l’energia elettrica immagazzinate nel materiale dielettrico, mentre il 2° è l’energia piezoelettrica Le tensioni e lo spostamento elettrico sono definite dalle derivate di ϕ(ε, E): σij = ∂ϕ ∂εij
Di = − ∂ϕ ∂Ei
per cui σ = c ε – hT E (6 equazioni) per cui D = h ε + eε E (3 equazioni) EQUAZIONI COSTITUTIVE
In generale, i materiali piezoelettrici non sono isotropi ma trasversalmente isotropi, poiché mostrano un comportamento elettromeccanico diverso se sollecitati nella direzione di polarizzazione (x3) oppure in direzione trasversale (x1, x2). Per essi si ha c =
⎡c11
⎢c
⎢ 12
⎢c13
⎢
⎢ 0
⎢ 0
⎢
⎢ 0
⎣
c12
c11
c13
c13
0
0
0
0
c13
c33
0
0
0
0
c 44
0
0
0
0
c 44
0
0
0
0
0
0
c11
⎤
⎥
⎥
⎥
0
⎥ 0
⎥
⎥
0
− c12 ⎥
⎥
2
⎦
⎡0
h = ⎢ 0
⎣⎢h31
0
0
0
0
0
h15
h15
0
h31
h33
0
0
ε
e11
⎡
eε = ⎢ 0
⎣⎢ 0
0⎤
0⎥
⎥
0⎦
0
ε
e11
0
⎤
⎥ ε
e33
⎦⎥
0
0
Le equazioni costitutive possono scriversi anche nella forma inversa ε = s (σ + hT E) = s σ + dT E D = d σ + eσ E in cui −1 s = c =
⎡ s11
⎢
⎢s12
⎢s13
⎢
⎢ 0
⎢ 0
⎢
⎢⎣ 0
s12
s13
0
0
s11
s13
0
s13
s33
0
0
0
s44
0
0
0
0
0
0
0
0
0
s44
0
matrice (6x6 simmetrica) di deformabilità elastica 0
⎤
⎥
0
⎥
⎥
0
⎥ 0
⎥
⎥
0
⎥
2 (s11 − s12 )⎥⎦
⎡0
d=h s = ⎢ 0
⎢⎣d31
0
0
0
d15
0
d31
0
d33
d15
0
0
0
matrice (3x6) di deformabilità piezoelettrica 0⎤
0⎥ 0⎥
⎦
eσ = eε + h s hT matrice (3x3 diagonale) di permittività a σ cost COSTANTI PIEZOELETTRICHE
In assenza di forze esterne (σ = 0): ⎡0 ⎤
E = ⎢ 0 ⎥ ⎢⎣V / t ⎥⎦
⎡dd31 ⎤
⎢d31
⎥V
T
ε = d E = 33
⎢ 0 ⎥ t ⎢0⎥
⎣0⎦
t
3
V
1
2
L
W
V
Δt
V
ΔL ΔW
= = ε11 = ε22 = d31 = ε33 = d33 L
W
t
t
t
d3j = rapporto tra la deformazione lungo l’asse xj ed il campo elettrico in direzione 3 ⇒ NB: d31 = d32 < 0 poiché un campo elettrico positivo E3 > 0 induce deformazioni negative (contrazioni) lungo le direzioni x1 e x2. In condizioni di corto circuito (E = 0): ⎡ ⎤ F
D = d σ = ⎢ ⎥ LW
⎢⎣d33 ⎦⎥
Q
F
Q
= D3 = d33 d33 = F
LW
LW
F
σ33 = LW
⇒ F
0
0
W
F
L
d33 = rapporto tra la carica elettrica Q di corto circuito e la forza F applicata lungo x3 EQUAZIONI DI EQUILIBRIO E COMPATIBILITÀ
In assenza di forze di volume bi e densità di carica ρ, le equazioni di equilibrio della statica e quelle di conservazione della carica elettrica dell’elettrostatica richiedono 3
3
∑ σij,j = 0 ∑ Di,i = 0 (3+1 = 4 equazioni) i =1
i, j =1
Inoltre le equazioni di congruenza ed il potenziale elettrico richiedono εij = 1 (ui,j+ uj,i) Ei = − Φ,i 2
(6+3 = 9 equazioni) Alle 13 equazioni di campo vanno aggiunte le 9 equazioni del legame costitutivo ed affiancate le condizioni al contorno, sia meccaniche che elettriche σ n = s su S 1 u = 0 su S 2 D ⋅ n = − q su SD Φ = Φ0 su SΦ S1 e S2 sono le parti complementari del contorno S su cui sono assegnate forze e spostamenti, mentre su SD e SΦ sono assegnate cariche e potenziale. La carica totale ed il flusso di corrente elettrica su SΦ valgono Q = − ∫S D ⋅ n dA φ
i = Q& APPLICAZIONI in campo industriale
SONAR e MICROFONI L’applicazione di una tensione alternata con una certa frequenza fa vibrare il trasduttore alla stessa frequenza generando onde acustiche e viceversa SENSORI DI DISTANZA e DI LIVELLO Usati anche come contatori nelle catene di montaggio MISURATORI DI FLUSSO Sfruttando l’effetto Doppler misurano la frequenza di spostamento delle onde ultrasonore riflesse dalle particelle del liquido. SALDATURA ULTRASONORA Applicando ultrasuoni di forte potenza su due parti in contatto, esse iniziano a vibrare riscaldandosi per attrito e fondendo. Imballaggi termoplastici, attrezzature biomedicali. PULITORI ULTRASONICI Sfruttando la potenza ultrasonora, generano cavitazione nel liquido, che assicura la pulitura di superfici anche complesse.
")