1
INDICE
SISTEMI
Sistemi di controllo
1.
Generalità
1.1. Sottosistema di ingresso o di misura
1.2. Sottosistema di elaborazione o di controllo
2.
Generalità sul sottosistema di ingresso o di misura
2.1. Circuito di rilevamento
2.1.1. Parametri caratteristici dei trasduttori
2.1.2. Classificazione dei trasduttori
2.2. Circuito di condizionamento
2.3. Convertitore analogico/digitale ADC
2.3.1. Circuito Sample/Hold
3.
Architettura di un sistema di acquisizione multicanale
4.
Sistemi di connessione
TELECOMUNICAZIONI
Trasmissione dati con modem
1.
Generalità
2.
Trasmissione seriale
2.1. Trasmissioni sincrone
2.2. Trasmissioni asincrone
2.3. Interfaccia seriale RS232-C
3.
Rete commutata e dedicata
3.1. Collegamento punto-punto
3.2. Collegamento multi punto
4.
Modem
4.1. Classificazione dei modem
4.2. Modalità di scambio dei dati
4.3. Modulazioni utilizzate
4.3.1. Modulazione di ampiezza ASK
4.3.2. Modulazione di frequenza FSK
4.3.3. Modulazione di fase PSK
4.3.4. Modulazione QAM
4.4. Codifica in banda base
4.4.1. Codice Manchester
4.5. Scrambler e Descrambler
4.5.1. Funzionamento e schema logico di Scrambler e Descrambler
2
TDP (TECNOLOGIA DISEGNO E PROGETTAZIONE)
Trasduttori
1.
2.
2.1.
3.
3.1.
4.
4.1.
5.
5.1.
Generalità
Trasduttori di temperatura
Termocoppia
Trasduttori di posizione
Trasformatori differenziali
Trasduttori di velocità
Dinamo tachimetrica
Trasduttori di campo magnetico
Trasduttori ad effetto Hall
ITALIANO/STORIA
L’industrializzazione italiana tra ‘800 e ‘900
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
L’industrializzazione dei paesi in ritardo
Lo sviluppo economico degli anni Ottanta
Una società moderna e industrializzata
Le caratteristiche del decollo industriale italiano
Il decollo industriale
La mobilitazione industriale in Italia
I problemi della riconversione
La ripresa degli anni Venti
La politica autarchia
La crisi del 1929 e le sue conseguenze
L’industria italiana alla vigilia della seconda guerra mondiale
I problemi economico-sociali del dopoguerra
La “ricostruzione” fra iniziativa della popolazione e aiuti stranieri
L’industria italiana negli anni della ricostruzione
Il “miracolo economico” italiano
I prodotti dell’industria nella vita quotidiana degli italiani
Il decennio 1963-1973
L’industria elettronica
DIRITTO
L’attività economica e l’azienda
1.
2.
3.
4.
L'attività economica
Concetto di azienda
L'azienda come sistema
La classificazione delle aziende
3
MATEMATICA
Gli integrali definiti e impropri
1.
1.1.
1.2.
2.
3.
4.
L’integrale definito e l’area del trapezoide
Le proprietà dell’integrale definito
Teorema del valor medio
Il calcolo delle aree
Il volume di un solido di rotazione
La lunghezza di un arco di linea piana e l’area di una superficie di
rotazione
5.
Gli integrali impropri
5.1. La funzione non è continua in uno degli estremi di integrazione o in un
punto interno ad [a,b]
5.2. L’integrale è esteso ad intervalli illimitati
6.
Esercizi
PROGETTO DI TELECOMUNICAZIONI
Modulazione di frequenza FSK con pannello didattico
della Samar
• Cenni teorici:
o Modulazioni digitali
o Modulazione di ampiezza ASK
o Modulazione di frequenza FSK
o Modulazione di fase PSK
o Modulazione QAM
• Pannello didattico Samar B4340
• Progetto di un trasmettitore FSK con timer 555
• Conclusioni
4
SISTEMI
SISTEMI DI CONTROLLO
1. Generalità
Nel campo dell’elettronica civile ed industriale assumono grande importanza i sistemi di
controllo automatici intendendo tutti quei sistemi che, tramite circuiti e apparecchiature
elettroniche, rilevano grandezze fisiche e le mantengono a un valore desiderato dopo un
confronto con quelle di riferimento. In particolare nell’ambito dei sistemi di controllo si
prenderanno in considerazione i sistemi di acquisizione dati. Un sistema di acquisizione
dati è costituito principalmente da due blocchi fondamentali (Fig. 1):
1 SOTTOSISTEMA DI INGRESSO O DI MISURA
2 SOTTOSISTEMA DI ELABORAZIONE O DI CONTROLLO
Fig. 1 – Schema a blocchi di un sistema di acquisizione dati
1.1. Sottosistema di ingresso o di misura
Il sottosistema di ingresso o di misura è quello direttamente a contatto con il mondo
fisico ed è in grado di rilevare grandezze fisiche tramite opportuni sensori o trasduttori.
Esso è costituito generalmente da tre blocchi (Fig. 2):
1 CIRCUITO DI RILEVAMENTO
2 CIRCUITO DI CONDIZIONAMENTO
3 CONVERTITORE ANALOGICO/DIGITALE
Fig. 2 – Schema a blocchi del sottosistema di ingresso o di misura
Il circuito di rilevamento svolge la funzione di trasformare la grandezza fisica in ingresso in
una grandezza elettrica ad essa proporzionale e il rilevamento avviene tramite dei
trasduttori.
Il circuito di condizionamento svolge la funzione di adattare il segnale elettrico,
proveniente dal circuito rilevatore, all’ingresso del convertitore analogico/digitale che
rappresenta il blocco successivo a quello di condizionamento. A volte circuito di
condizionamento viene suddiviso in due blocchi: circuito di condizionamento primario e
circuito di condizionamento secondario. Ciò nasce dall’esigenza di realizzare una corretta
amplificazione.
Il convertitore analogico/digitale svolge la funzione di convertire il segnale analogico,
proveniente dal circuito di condizionamento, in un segnale digitale adatto ad essere
acquisito, memorizzato ed elaborato dal sottosistema di controllo o di elaborazione.
Si ricorda inoltre che lo schema a blocchi del sistema di acquisizione dati preso in
considerazione, si riferisce a una sola sorgente fisica; invece nel caso sia necessario
rilevare più grandezze fisiche (anche di natura diversa) il sistema si avvale di un ulteriore
5
blocco in ingresso e precisamente di un multiplexer. Il sistema prende ora il nome di
sistema di acquisizione dati multicanale.
1.2. Sottosistema di elaborazione o di controllo
Il sottosistema di elaborazione o di controllo (Fig. 3) effettua le operazioni di
memorizzazione e di elaborazione dei dati acquisiti dal sottosistema di misura. Esso è
costituito dall’unità centrale ossia da un microprocessore in grado di elaborare e
memorizzare i dati provenienti dal sottosistema di misura.
Fig. 3 – Schema a blocchi del sottosistema di elaborazione o di controllo
2. Generalità sul sottosistema di ingresso o di misura
Come si è detto, un sistema di acquisizione dati è costituito principalmente da due blocchi
fondamentali (SOTTOSISTEMA DI INGRESSO O DI MISURA; SOTTOSISTEMA DI
ELABORAZIONE O DI CONTROLLO) e, in particolare, il sottosistema di ingresso o di
misura è costituito generalmente da tre blocchi:
1 CIRCUITO DI RILEVAMENTO
2 CIRCUITO DI CONDIZIONAMENTO
3 CONVERTITORE ANALOGICO/DIGITALE
2.1. Circuito di rilevamento
Il circuito di rilevamento è costituito da due blocchi (Fig. 4):
1 SENSORE
2 CIRCUITO DI CONVERSIONE
Fig. 4 – Schema a blocchi del circuito di rilevamento
Il sensore è un dispositivo in grado di rilevare le variazioni di una grandezza fisica e
fornisce in uscita ancora una grandezza fisica.
Il circuito di conversione invece, che solitamente è già integrato con il sensore, è un
dispositivo in grado di convertire la grandezza fisica presente all’uscita del sensore in una
grandezza elettrica.
Questi due blocchi costituiscono nell’insieme quello che prende il nome di trasduttore.
Si definisce trasduttore un circuito che, nell’ambito di un sistema di controllo, converte la
grandezza fisica presente in ingresso in una grandezza di natura elettrica (solitamente una
tensione).
6
2.1.1. Parametri caratteristici dei trasduttori
Nella scelta di un trasduttore è necessario che alcune caratteristiche siano garantite per
un ottimo utilizzo. Le caratteristiche fondamentali di un trasduttore sono:
1 LINEARITÀ
2 SENSIBILITÀ
3 CAMPO DI FUNZIONAMENTO
4 TEMPO DI RISPOSTA
5 RISOLUZIONE
6 CARATTERISTICA DI TRASFERIMENTO
La linearità è uno dei parametri fondamentali del trasduttore dalle cui caratteristiche è
possibile definire l’errore massimo del trasduttore. Si può ovviare all’errore di linearità
operando in un campo più ristretto dove la caratteristica è lineare. In caso contrario
bisogna linearizzare la caratteristica del trasduttore mediante appositi circuiti detti circuiti di
linearizzazione.
La sensibilità di un trasduttore indica il rapporto tra la variazione della grandezza di uscita
e quella di ingresso.
Il campo di funzionamento di un trasduttore fornisce la differenza tra il valore massimo e il
valore minimo che può assumere la grandezza di ingresso in corrispondenza della quale
l’uscita è lineare.
Il tempo di risposta di un traduttore rappresenta il tempo che impiega a raggiungere un
valore di uscita conforme a quello di ingresso quando questa subisce una variazione
improvvisa.
La risoluzione di un trasduttore è la minima variazione della grandezza di ingresso che il
traduttore è in grado di percepire e si esprime in percentuale.
La caratteristica di trasferimento di un trasduttore rappresenta la relazione che intercorre
tra la grandezza di uscita e quella di ingresso del trasduttore stesso.
2.1.2. Classificazione dei trasduttori
Generalmente esistono diversi tipi di classificazione per i trasduttori. Queste
classificazioni vengono effettuate o in funzione del segnale che il traduttore fornisce in
uscita, o in funzione della fonte di energia esterna, o in funzione della grandezza fisica
presente in ingresso.
Nel primo caso i trasduttori suddividono in:
1 TRASDUTTORI ANALOGICI
2 TRASDUTTORI DIGITALI
Nel secondo caso i trasduttori si suddividono in:
1 TRASDUTTORI ATTIVI
2 TRASDUTTORI PASSIVI
Nell’ultimo caso i trasduttori si suddividono in:
1 TRASDUTTORI DI TEMPERATURA
2 TRASDUTTORI DI UMIDITÀ
3 TRASDUTTORI DI PRESSIONE
4 TRASDUTTORI DI LUMINOSITÀ
5 TRASDUTTORI DI POSIZIONE
6 TRASDUTTORI DI VELOCITÀ
7
I trasduttori analogici forniscono in uscita una grandezza elettrica che varia con continuità
in funzione della grandezza fisica in ingresso. Questo significa che in un intervallo di
tempo finito, la grandezza elettrica di uscita potrà assumere infiniti valori.
I trasduttori digitali forniscono in uscita una grandezza elettrica che assume due soli valori.
Questo significa che in un intervallo di tempo finito, la grandezza elettrica di uscita
assumerà due soli valori a cui si associa il livello alto o il livello basso.
I trasduttori attivi forniscono in uscita una grandezza elettrica senza che sia necessaria
alcuna fonte di energia esterna.
I trasduttori passivi forniscono in uscita una grandezza elettrica solo in presenza di una
fonte di energia esterna.
I trasduttori di temperatura trasformano una variazione di temperatura in una grandezza
elettrica proporzionale ad essa.
I trasduttori di umidità trasformano una variazione di umidità in una grandezza elettrica
proporzionale ad essa.
I trasduttori di pressione forniscono in uscita una grandezza elettrica proporzionale alla
variazione della pressione in ingresso.
I trasduttori di luminosità forniscono in uscita una grandezza elettrica proporzionale alla
variazione della luminosità in ingresso.
I trasduttori di posizione trasformano un movimento lineare o angolare in una grandezza
elettrica proporzionale ad esso.
I trasduttori di velocità forniscono in uscita una grandezza elettrica proporzionale velocità
di un organo in movimento.
2.2. Circuito di condizionamento
I segnali provenienti dal trasduttore, prima di essere inviati al convertitore A/D (ADC),
devono essere condizionati. A tale scopo vengono utilizzati opportuni circuiti progettati in
modo da svolgere una o più delle seguenti funzioni:
1 CONVERSIONE CORRENTE/TENSIONE: Molti trasduttori forniscono in uscita una
corrente e non direttamente una tensione. Poiché il segnale possa essere inviato all’ADC
si utilizza un circuito di condizionamento a operazionale che svolge la funzione di
convertitore corrente/tensione.
2 AMPLIFICAZIONE E TRASLAZIONE DI LIVELLO: Poiché le tecnologie dei trasduttori
consentono di fornire in uscita livelli di tensione molto bassi, è opportuno amplificare questi
segnali provenienti dal trasduttore per adattarli a quelli di ingresso all’ADC. Il circuito di
condizionamento svolge quindi la funzione di amplificare il segnale ed eventualmente
effettuare una traslazione di livello.
3 FILTRAGGIO: Se si verifica una distorsione dovuta alla sovrapposizione di un segnale di
rumore al segnale proveniente dal trasduttore, la si può eliminare mediante un filtro passabasso.
4 ISOLAMENTO: Spesso si utilizzano circuiti di condizionamento con amplificatori di
isolamento soprattutto in quei sistemi di controllo in cui si fa uso di apparecchiature
elettromedicali le cui tensioni risulterebbero pericolose sia per le persone che per le
apparecchiature stesse.
5 LINEARIZZAZIONE: Un’altra funzione svolta dal circuito di condizionamento è quella di
linearizzare la curva di risposta di un trasduttore che fornisce una caratteristica non
lineare.
8
Tra le funzioni sopra elencate quelle fondamentali sono: conversione corrente/tensione,
amplificazione e traslazione di livello, isolamento. Le funzioni di linearizzazione e filtraggio
invece, se non sono integrate nello stesso circuito di condizionamento, possono essere
ottenute con appositi dispositivi esterni.
In particolare la linearizzazione è necessaria per due motivi: mantenere valori costanti
per la successiva fase di conversione analogica/digitale; mantenere la caratteristica il più
lineare possibile per evitare che l’ADC fornisca valori digitali non rispondenti a quelli
analogici.
Per quanto riguarda invece il filtraggio, spesso accade che al segnale utile da convertire si
sovrapponga un segnale di rumore; questo fenomeno che prende il nome di aliasing e
consiste nella sovrapposizione di bande nello spettro delle frequenze, si può ovviare
grazie a dei filtri passa-basso.
2.3. Convertitore analogico/digitale ADC
Il segnale analogico presente all’uscita del circuito di condizionamento deve essere
convertito in un segnale digitale attraverso un convertitore analogico/digitale. Il
convertitore A/D infatti trasforma il segnale analogico presente al suo ingresso in un
segnale digitale a n bit. Un convertitore A/D effettua quindi la quantizzazione di un
segnale analogico, cioè trasforma un determinato valore analogico del segnale in un
codice binario. Il valore massimo della tensione di ingresso, che non deve mai essere
superato, è definito tensione di fondo scala (VFS) e si possono avere sia convertitori che
ammettono valori di tensioni d’ingresso positivi o negativi e sia convertitori che accettano
solo segnali positivi. La relazione che intercorre tra il segnale analogico in ingresso Vi e il
corrispondente valore digitale in uscita N deve essere di proporzionalità:
Vi = K·N
Dove:
K =Q=
V FS
[Quanto o risoluzione del convertitore];
M
N = (Bn–1·2n-1+…+B3·23+B2·22+B1·21+B0·20) [Numero digitale in uscita]
Quindi:
Vi =
V FS
⋅ (B n - 1 ⋅ 2 n − 1 + ... + B 3 ⋅ 2 3 + B 2 ⋅ 2 2 + B1 ⋅ 21 + B 0 ⋅ 2 0 )
M
9
In un convertitore A/D a n bit le possibili configurazioni di uscita sono finite, pari a 2n,
mentre il segnale analogico Vi può variare con continuità nell’intervallo di lavoro
assumendo di conseguenza infiniti valori. Nel processo di conversione da analogico a
digitale si commette quindi un errore denominato quanto Q o risoluzione del
convertitore che in definitiva rappresenta la minima variazione della tensione Vi
necessaria a produrre un incremento (o decremento) unitario del numero binario di uscita.
Lo schema a blocchi di un convertitore A/D è costituito da più ingressi e più uscite come
mostrato in figura 5:
Fig. 5 – Schema a blocchi di un convertitore analogico/digitale
In particolare:
-
Vi è la tensione analogica da convertire;
N è il numero digitale di uscita proporzionale a Vi;
SC è un segnale digitale detto Start Conversion che abilita il convertitore A/D alla
conversione;
EOC è un segnale digitale detto End Of Conversion che cambia stato logico quando
il convertitore ha finito la conversione e indica che il dato è disponibile in uscita;
CK è il segnale di clock necessario al sincronismo delle circuiterie interne del
convertitore.
2.3.1. Circuito Sample/Hold
L’uso di un convertitore A/D è essenzialmente rivolto al campionamento di segnali
analogici in determinati istanti, con conseguente trasformazione del valore analogico in un
corrispondente dato digitale. Un convertitore A/D per effettuare la trasformazione di un
dato da analogico a digitale impiega un certo intervallo di tempo definito tempo di
conversione tc. Se il segnale posto all'ingresso del convertitore non ha un valore costante
nel tempo, è fondamentale che, per tutto l'intervallo di tempo durante il quale convertitore
effettua la conversione (tc), il segnale non subisca variazioni di ampiezza. Nella realtà però
questo non avviene e può accadere quindi che la frequenza massima del segnale da
convertire sia superiore rispetto a quella che riuscirebbe a convertire il convertitore A/D. In
questo caso sarà necessario inserire tra l'uscita del circuito di condizionamento e
l'ingresso del convertitore A/D un circuito Sample/Hold (S/H). Il Sample/Hold è un
dispositivo in grado di memorizzare il valore assunto dal segnale in un determinato istante
(fase di Sample) e mantenerlo costante all'ingresso del convertitore per tutto il tempo
impiegato ad effettuare la conversione (fase di Hold). Il circuito è formato da due buffer
tra i quali i è posto un interruttore analogico comandato da un multivibratore astabile. I due
buffer servono a isolare il convertitore A/D dal circuito di condizionamento. Il
funzionamento del circuito è il seguente: quando l'interruttore viene chiuso il condensatore
inizia a caricarsi seguendo lo stesso andamento della Vi; quando invece l'interruttore viene
aperto il condensatore resta carico sull'ultimo valore di tensione acquisito. Naturalmente la
tensione ai suoi capi la si ritrova anche in uscita al Sample/Hold.
10
In fig. 6 si mostra il circuito, lo schema a blocchi e i relativi diagrammi di tempificazione di
un Sample/Hold:
Fig. 6 – Circuito, schema a blocchi e relativi diagrammi di tempificazione di un Sample/Hold
Le caratteristiche fondamentali dei S/H sono:
- Tempo (di ritardo) di apertura (ta): è l'intervallo di tempo richiesto all'interruttore per
aprirsi completamente dopo che è stato dato il comando di Hold.
- Tempo di acquisizione (tac): è il tempo che intercorre dal momento in cui viene dato
il comando di Sample a quello in cui l'uscita raggiunge il valore di ingresso.
- Tempo di incertezza di apertura (tu): rappresenta l'incertezza del ritardo d'apertura
dell’interruttore tra un campionamento all'altro.
- Tempo di assestamento del modo di Hold (tset): è il tempo che occorre all’uscita per
l’assestamento a partire dall’istante in cui ha inizio il segnale di Hold.
Il tempo di apertura è la grandezza che determina il massimo valore della frequenza del
segnale che può essere convertito. In particolare se si utilizza soltanto il convertitore A/D
la frequenza massima del segnale da convertire deve essere:
fmax ≤
1
2 ⋅ π ⋅ tc
n
Invece se si utilizza un convertitore A/D, preceduto dal Sample/Hold, la frequenza
massima del segnale da convertire diventa:
11
1
2 ⋅ π ⋅ ta
Utilizzando questa relazione la frequenza massima del segnale da convertire aumenta
rispetto al caso del solo convertitore in quanto il tempo ta è normalmente molto più piccolo
del tempo tc.
Il campionamento del segnale da convertire deve essere effettuato tenendo conto anche
del teorema del campionamento di Shannon. Secondo questo teorema un segnale la
cui massima frequenza è fmax può essere ricostruito se la frequenza di campionamento
fc è:
fmax ≤
n
fC ≥ 2fmax
Inoltre, la massima frequenza di campionamento, è legata sia tempo di conversione
dell’ADC che ai tempi necessari per campionare e mantenere il segnale. Infatti, prima di
poter avviare una nuova conversione, bisogna attendere che il convertitore abbia
terminato la conversione precedente e che il S/H fornisca un segnale stabile in uscita. Si
deve quindi attendere un tempo pari alla somma del tempo di acquisizione e del tempo di
apertura del S/H più il tempo di conversione dell’ADC. Così facendo la massima
frequenza di campionamento risulta:
fCmax ≤
1
( t ac + t a + t c )
e quindi, in accordo con il teorema di campionamento di Shannon, per poter
campionare correttamente il segnale con il S/H deve avere un valore massimo di
frequenza pari a:
fmax ≤
fCmax
1
≤
2
2 ⋅ ( t ac + t a + t c )
3. Architettura di un sistema di acquisizione multicanale
Quando è necessario rilevare un numero maggiore di grandezze il sistema di acquisizione
dati viene completato con la presenza di un multiplexer analogico (MUX) schematizzato
con un commutatore elettronico a più ingressi ed una sola uscita secondo lo schema
indicato in figura 7:
Fig. 7 – Schema a blocchi di un sistema di acquisizione multicanale
12
Quando in un sistema di acquisizione è presente il MUX, per il calcolo della massima
frequenza di campionamento occorre tener presente anche del tempo TMUX che
rappresenta l'intervallo di tempo dal momento della selezione di un canale al momento in
cui il dato presente all'uscita del MUX è stabile. Questo periodo di tempo è dato da:
TMUX=TS+TON
dove TS è il tempo di setting cioè l'intervallo di tempo che intercorre dall'istante in cui
l'interruttore è chiuso e l'istante in cui l’uscita raggiunge il valore finale, mentre TON è il
tempo richiesto per connettere l'ingresso all'uscita del MUX. Se i canali di ingresso sono N
e ognuno di essi deve essere campionato con la stessa frequenza fC, allora la frequenza
di campionamento dell'intero sistema fT risulterà pari a:
fT=N·(fC+fMUX)
dove fC è la frequenza di campionamento relativa ad un singolo canale mentre fMUX è
l'inverso di TMUX:
fC ≤
1
( t ac + t a + t c )
fMUX =
1
T MUX
Nelle catene di acquisizione multicanali è preferibile spesso utilizzare convertitori A/D con
il circuito S/H integrato nello stesso chip, o anche convertitori con S/H e multiplexer
interno, riducendo la complessità circuitale del sistema.
4. Sistemi di connessione
Il trasferimento dei dati verso il sistema di elaborazione viene generalmente effettuato con
collegamenti di tipo seriale come ad esempio l'interfaccia seriale RS-232/C. Questo
metodo consente di collegare un solo dispositivo che invia dati al sistema di controllo e la
velocità di trasmissione massima è di circa 20kbps. Se i segnali generati dai sensori sono
tutti dello stesso tipo (Fig. 8), vengono inviati ad un multiplexer e poi al circuito di
condizionamento. Successivamente il convertitore A/D effettua la conversione del segnale
proveniente da ogni canale trasformandolo in dato digitale. A questo punto un
microcontrollore svolge la funzione di controllo di tutto il sistema di acquisizione, di
serializzazione dei dati e del loro invio sulla linea di collegamento con il sistema di
elaborazione.
Fig. 8 – Schema a blocchi di un sistema di acquisizione dati multicanale con trasduttori dello stesso tipo
13
Invece, nel caso si abbiano segnali generati da sensori o trasduttori di natura diversa
(Fig. 9), sarà necessario utilizzare un circuito di condizionamento e di filtro per ogni singolo
canale. Per migliorare le prestazioni del collegamento sia in termini di velocità che di
distanza, si utilizza l'interfaccia seriale RS-485 che permette di collegare fino a 31
dispositivi diversi lavorando in modalità full-duplex.
Fig. 9 – Schema a blocchi di un sistema di acquisizione dati multicanale con trasduttori di natura diversa
14
TELECOMUNICAZIONI
TRASMISSIONE DATI CON MODEM
1. Generalità
Si definisce trasmissione dati l’insieme delle tecniche hardware e software per la
propagazione a distanza d'informazioni digitali tra due o più sistemi d'elaborazione, definiti
DTE (Data Terminal Equipement), utilizzando un'opportuna rete di comunicazione su cui
far viaggiare i dati.
Generalmente ci si riferisce a sistemi d'elaborazione posti in località diverse e distanti tra
loro, quindi è difficile ipotizzare di poter collegare direttamente le due stazioni attraverso
un certo numero di cavi di collegamento.
Anche in questo caso, così come in un sistema di acquisizione dati, la trasmissione deve
essere di tipo seriale, e cioè i bit da trasmettere sono inviati sequenzialmente, uno per
volta e non tutti e otto contemporaneamente. La trasmissione parallela invece è
possibile solo tra elementi vicini di uno stesso sistema o tra apparecchiature distanti tra
loro fino a qualche metro.
Per questi motivi nelle comunicazioni a grandi distanze si utilizza la rete telefonica
pubblica che consente, inoltre, il collegamento ad un qualsiasi altro punto nel mondo.
Uno dei problemi da affrontare è l’adattamento del segnale digitale alla rete telefonica.
Infatti, il segnale numerico ha uno spettro di frequenza teoricamente infinito mentre il
canale fonico ha uno spettro compreso tra 300Hz e 3400Hz. Si possono quindi ipotizzare
due soluzioni:
1 Modulare il segnale digitale utilizzando una portante analogica avente frequenza
compresa tra 300Hz e 3400Hz; il risultato della modulazione sarà trasmesso nella rete
telefonica come un normale segnale fonico, cioè analogico, per poi essere demodulato
quando raggiunge il ricevitore. Le operazioni di modulazione e demodulazione, codifica e
compressione dei dati, sono svolte da un dispositivo di comunicazione (DCE=Data
Communication Equipement) denominato MODEM (MODulatore DEModulatore).
2 Utilizzare reti adatte a trasmettere segnali numerici come, ad esempio, la rete CDN
(Collegamenti Diretti Numerici), la rete ISDN (Integrated Service Digital Network) e la rete
ADSL (Asymmetric Digital Subscriber Line). Le reti numeriche consentono di operare ad
elevate velocità e con bassi tassi d'errore.
Durante la trasmissione infatti, il segnale subisce distorsioni da parte del trasmettitore,
del canale di trasmissione e del ricevitore oltre al rumore recepito dal canale di
trasmissione. La distorsione consiste nell’alterazione non voluta del segnale; il rumore
invece è un disturbo costituito da elementi prevedibili ed imprevedibili come le diafonie, il
rumore termico, i disturbi atmosferici, alterazione delle caratteristiche dei componenti per
invecchiamento e riscaldamento. Per questi motivi conviene introdurre ridondanza nel
segnale, attraverso dei codici di controllo e di autocorrezione, in modo di assicurarsi, entro
certi limiti, la correttezza della trasmissione.
In fig. 1 si mostra lo schema a blocchi di un sistema di trasmissione dati che collega due
dispositivi terminali DTE utilizzando due modem:
Fig. 1 – Schema a blocchi di un sistema di trasmissione dati con MODEM
15
2. Trasmissione seriale
Nella trasmissione seriale il collegamento fra trasmettitore e ricevitore si può realizzare
utilizzando un minimo di due fili, uno su cui viaggiano i bit, l'altro relativo invece alla
massa. Le trasmissioni seriali si dividono in:
1 SINCRONE;
2 ASINCRONE.
2.1. Trasmissioni sincrone
Nelle trasmissioni sincrone il trasmettitore invia degli impulsi di clock,
contemporaneamente ai bit di informazione, in modo che il ricevitore possa leggere
correttamente i dati in arrivo ad intervalli regolari di tempo scanditi proprio dal segnale di
sincronismo (segnale di clock) inviato dal trasmettitore.
Per questo motivo si può pensare che il collegamento lo si realizza con tre fili (Fig. 2), uno
relativo al clock, uno su cui viaggiano i dati e l’altro per la massa, ma nella realtà si
utilizzano due soli fili poiché i segnali di sincronismo si inviano sulla linea su cui vengono
inviati i dati.
Fig. 2 – Schema a blocchi di una trasmissione seriale sincrona
Se la trasmissione sincrona avviene tra un modem e l’interfaccia seriale di un computer, il
clock può essere generato sia dall’interfaccia seriale che dal modem stesso; invece se i
dispositivi collegati sono due modem, il segnale di sincronismo è contenuto nella tensione
analogica che il modem trasmettitore invia al ricevitore; quest’ultimo, attraverso
un’operazione di demodulazione, estrae il segnale digitale che contiene particolari caratteri
che consentono la sincronizzazione con il trasmettitore.
I dati sono inviati in blocchi di decine o centinaia di caratteri.
Ogni blocco è preceduto da caratteri di sincronismo e seguito da caratteri di controllo
CRC (Codice Ciclico di Ridondanza), per verificare la correttezza della trasmissione, e da
un carattere che indica la fine del blocco trasmesso.
2.2. Trasmissioni asincrone
Nel collegamento seriale asincrono il trasmettitore non invia alcun segnale di
sincronismo al ricevitore che deve essere in grado di capire quando ha inizio la
trasmissione di un carattere in modo da sincronizzare la lettura dei vari bit che
compongono il carattere stesso.
In pratica un carattere in trasmissione è preceduto da un bit di start e seguito da uno o
più bit di stop.
Il bit di start è costituito dal livello logico 0 mentre il bit di stop dal livello logico 1.
Così facendo, in assenza di trasmissione si ha il livello logico 1; invece quando la
trasmissione ha inizio, il bit di start genera un fronte che sincronizza il clock del ricevitore.
Successivamente sono inviati in sequenza, ad intervalli regolari di tempo, i bit del
carattere da trasmettere utilizzando un codice ASCII a 7 o 8 bit e seguito, eventualmente,
da un bit di parità e da uno o due bit di stop.
Si ricorda che il trasmettitore presenta nello stadio di uscita un circuito in grado di
effettuare la conversione di un carattere dalla forma parallela a quella seriale in modo del
16
tutto simile ad un registro a scorrimento con caricamento parallelo ed uscita seriale
(PISO).
Il ricevitore, invece, presenta nello stadio d'ingresso un circuito in grado di trasformare il
carattere ricevuto dalla forma seriale a quella parallela in modo del tutto simile ad un
registro a scorrimento con caricamento seriale e uscita parallela (SIPO).
Vi sono circuiti integrati in grado di comportarsi, all'occorrenza, sia da SIPO sia da PISO;
essi prendono il nome di USART (Universal Synchronous Asynchronous Riceiver
Trasmitter = ricevitore trasmettitore sincrono o asincrono universale) e sono utilizzati sia
nei ricevitori che nei trasmettitori.
Gli USART sono convenienti soprattutto nelle trasmissioni bidirezionali dove i ruoli fra
trasmettitore e ricevitore sono intercambiabili.
2.3. Interfaccia seriale RS232-C
Per realizzare il collegamento seriale (di tipo sincrono o asincrono) tra un dispositivo di
comunicazione DCE come, ad esempio, il modem e un dispositivo terminale DTE, come,
ad esempio, il computer, anche in questo caso si utilizza l'interfaccia seriale RS232-C.
Essa è costituita da un insieme di 25 linee, non tutte indispensabili, che trasportano i bit
relativi ai dati, i segnali di controllo e la massa.
Solitamente sul DTE (computer, ad esempio) si trova la spina (connettore maschio)
mentre sul DCE (modem, ad esempio) si trova la presa (connettore femmina) dell’RS232C; in alcuni DCE invece (il mouse seriale, ad esempio) manca la presa esterna poiché il
cavo di collegamento entra direttamente nell'apparecchiatura.
I tipici dispositivi periferici che si possono collegare ad un computer via RS232-C sono il
drive per dischetti, la stampante, il modem, il mouse ecc.
3. Rete commutata e dedicata
L’utilizzo del modem per la trasmissione dei dati può avvenire sulla rete telefonica
commutata (RC) o dedicata (RD).
Nel primo caso il modem si collega alla normale presa telefonica e la trasmissione avviene
dopo aver selezionato via software il numero di telefono del destinatario; il modem di
quest’ultimo si pone in risposta automatica e riceve le informazioni provenienti dalla linea.
I vantaggi della RC consistono nel basso costo d'esercizio e nella grande flessibilità in
quanto è possibile collegarsi con chiunque possegga un modem. Uno svantaggio è la
relativa lentezza di funzionamento dovuta alla modesta qualità della linea telefonica
commutata. In questi ultimi anni la rete telefonica commutata si è trasformata quasi del
tutto da analogica in numerica e il canale di trasmissione, che collega le attuali centrali, è
in fibra ottica. Questo ha comportato un notevole miglioramento non solo nella qualità
della trasmissione ma anche nella elevata velocità con basso tasso d'errore.
Invece, il collegamento dell’utente sulla rete telefonica dedicata RD, può essere di due tipi:
1 COLLEGAMENTO PUNTO-PUNTO;
2 COLLEGAMENTO MULTI PUNTO.
3.1. Collegamento punto-punto
Nel caso di collegamento punto-punto l’utente è connesso permanentemente ad un
solo utente. Per le chiamate, quindi, non è necessario formulare alcun numero e il
contratto che si stipula con la TELECOM prevede solo una spesa fissa che non dipende
dalla durata della comunicazione ma dalla distanza dei due utenti e dalla velocità di
comunicazione richiesta.
I vantaggi della RD consistono nello scarso disturbo che consente un'elevata velocità
di funzionamento. Uno svantaggio è il costo piuttosto elevato.
17
3.2. Collegamento multipunto
Nel caso di collegamento multipunto si utilizza una sola linea che collega tra loro più
dispositivi. La struttura è basata su un elaboratore centrale dotato di un proprio modem
collegato ad una sola linea alla quale sono connessi, tramite modem, vari DTE remoti. La
linea, ovviamente, può essere utilizzata da una sola coppia d'apparecchiature per cui è
necessario un protocollo che stabilisca l’accesso alla linea da parte dei vari DTE.
In fig. 3 si mostra lo schema a blocchi di un collegamento multipunto tra un elaboratore
centrale e più dispositivi periferici, tramite l’utilizzo di modem.
Fig. 3 – Schema a blocchi di un collegamento multipunto tra un elaboratore centrale e più DTE
4. Modem
Il modem è un dispositivo periferico che consente il collegamento seriale tra due
computer remoti o tra un computer e un terminale utilizzando come linea di comunicazione
quella telefonica. Con il termine MODEM si intende la fusione delle parole MODulatore
DEModulatore. Tale dispositivo, infatti, compie principalmente la funzione di trasformare il
segnale digitale proveniente da un dispositivo DTE come, ad esempio, l’uscita seriale di
un computer, in un segnale analogico con frequenze contenute in quelle del canale
telefonico che vanno da 300Hz a 3400Hz.
Il modem, quindi, svolge l’operazione di adattare il segnale digitale alla linea telefonica
attraverso una conversione digitale/analogica.
Tra la linea telefonica e il dispositivo DTE ricevitore deve essere connesso naturalmente
un altro modem che svolge il compito opposto a quello utilizzato in fase di trasmissione e
cioè deve trasformare il segnale analogico proveniente dalla linea telefonica in un
segnale digitale perfettamente identico a quello inviato dal DTE trasmettitore.
Ciascun modem, ovviamente, presenta al suo interno due canali distinti: il canale
modulatore utilizzato nella trasmissione e il canale demodulatore utilizzato nella ricezione.
4.1. Classificazione dei modem
I modem possono essere classificati in:
- MODEM FONICI;
- MODEM A BANDA LARGA;
- MODEM IN BANDA BASE.
I modem fonici hanno una larghezza di banda pari a quella di un canale telefonico e
questo limita la velocità di trasmissione a 56Kbps. Attualmente sono stati sostituiti dai
modem ADSL che consento velocità di trasmissione dell’ordine di 10Mbps.
I modem a banda larga invece utilizzano il gruppo primario che va da 60KHz a 108KHz
costituito da 12 canali telefonici e questo consente di raggiungere velocità di trasmissione
più elevate che si aggirano dai 48Kbps fino a 144Kbps e oltre.
I modem in banda base si utilizzano nei collegamenti a breve distanza che non superino
quindi alcuni Km.
18
In questo caso il segnale digitale transita nella linea dopo aver subito una conversione di
codice per meglio adattarsi al canale di trasmissione. Tali modem, quindi, non realizzano
la modulazione e demodulazione analogica ma solo una conversione di codice.
I modem in banda base risultano più semplici rispetto a quelli fonici e consentono elevate
velocità di trasmissione. Sono utilizzati per realizzare le reti locali LAN (schede di rete dei
PC)
4.2. Modalità di scambio dei dati
I modem possono scambiare dati tra di loro in tre modalità:
-
SIMPLEX;
HALF DUPLEX;
FULL DUPLEX.
Nel primo caso (Fig. 4), i dati transitano solo dal trasmettitore al ricevitore ma questa
modalità di funzionamento al giorno d’oggi non è più utilizzata.
Fig. 4 – Collegamento simplex
La trasmissione half-duplex (Fig. 5), un tempo molto utilizzata, consente la trasmissione
bidirezionale ma in momenti diversi e questo significa che quando un dispositivo
trasmette l’altro riceve e viceversa.
Fig. 5 – Collegamento half-duplex
La trasmissione full-duplex (Fig. 6), infine, consente la trasmissione bidirezionale e
simultanea permettendo quindi ai dati di viaggiare su due canali fisici distinti (a quattro fili)
o su un solo canale fisico (a due fili) attraverso la tecnica della multiplazione in modo da
evitare collisioni.
Fig. 6 – Collegamento full-duplex
4.3. Modulazioni utilizzate
I modem fonici e a banda larga basano il loro funzionamento sulla modulazione che
consiste nella modifica dello spettro di frequenza del segnale digitale e la si ottiene
modulandolo con un’onda sinusoidale a frequenza fissa detta portante.
Sono possibili varie tecniche di modulazione:
-
modulazione di ampiezza ASK (Amplitude Shift Keying);
modulazione di frequenza FSK (Frequency Shift Keying);
modulazione di fase PSK (Phase Shift Keying);
modulazione QAM (Quadrature Amplitude Modulation).
19
4.3.1. Modulazione di ampiezza ASK
La modulazione di ampiezza ASK consiste nell’associare ai bit 0 e 1 due valori distinti di
ampiezze della portante. In particolare se si associa al livello alto la presenza della
portante e a quello basso il segnale nullo, la modulazione è detta OOK (non trova
applicazione nei modem).
4.3.2. Modulazione di frequenza FSK
La modulazione di frequenza FSK consiste nell’associare ai bit 0 e 1 due valori distinti di
frequenze simmetrici rispetto al valore della frequenza portante. Così facendo il segnale
portante subirà una variazione di frequenza, denominata deviazione di frequenza, a
seconda dello stato logico 0 o 1 assunto dal segnale modulante. È utilizzata nei modem
conformi alle normative del ITU-T V.21 e V.23 ma, poiché questi modem sono lenti, tale
tecnica non è più utilizzata. La modulazione FSK trova applicazione nella telefonia
cellulare e nei sistemi in ponte radio.
4.3.3. Modulazione di fase PSK
La modulazione di fase PSK consiste nell’associare ai bit 0 e 1 due valori distinti di fase
della portante. Così facendo il segnale portante subirà una variazione di fase a seconda
dello stato logico 0 o 1 assunto dal segnale modulante. È utilizzata nei modem a media
velocità ma nella realtà è molto utilizzata la modulazione di fase differenziale DPSK..
Esistono diverse varianti della PSK per aumentare la velocità di trasmissione.
4.3.4. Modulazione QAM
La modulazione QAM utilizza contemporaneamente sia la modulazione di ampiezza che
la modulazione di fase. È utilizzata nei modem ADSL e nelle trasmissioni TV in digitale
terrestre.
4.4. Codifica in banda base
Nei modem in banda base i segnali digitali non vengono trasmessi così come sono ma si
effettua una conversione di codice.
Infatti, in presenza di una lunga sequenza di 0 o di 1, diventa difficile decodificare
l’informazione digitale ed anche l’estrazione del segnale di sincronismo; inoltre su di un
cavo non si possono inviare direttamente i dati perché sono unipolari ma al contrario è
preferibile far viaggiare dati bipolari.
Per tutti questi motivi, si ricorre all’utilizzo di particolari codici come il codice bifase, noto
come codice Manchester, il codice bifase differenziale e il codice di Miller, noto come
codice a modulazione di ritardo.
4.4.1. Codice Manchester
Tra le codifiche più utilizzate nei modem in banda base (schede di rete) troviamo il
codice Manchester. Esso produce una variazione di fase di 180° rispe tto al periodo di
clock precedente se il bit del dato assume valore 1, viceversa non produce alcuna
variazione di fase come mostrato in figura 7:
20
Fig. 7 – Tempificazione del dato 101011100 secondo il codice Manchester
Così facendo si risolvono tre problemi e cioè:
1 le lunghe sequenze di 0 o di 1 vengono sostituite da una sequenza casuale di bit;
2 il dato da essere unipolare (0V÷5V) diventa bipolare (-12V÷+12V);
3 il segnale in uscita è costituito da un codice semplice e permette l’estrazione del segnale
di sincronismo.
4.5. Scrambler e Descrambler
Nella realtà le trasmissioni sono tutte di tipo sincrono e quindi prevedono la presenza di
un segnale di sincronismo.
Può accadere però un problema e cioè che in presenza di una lunga sequenza di 0 o di 1
si avrebbe difficoltà ad estrarre il clock.
Per risolvere questo inconveniente si inserisce un circuito Scrambler nello stadio di
trasmissione che genera sequenze di bit casuali cioè una frequente alternanza di 0 e di 1
anche in presenza di lunghe sequenze di bit costanti dei dati in trasmissione.
Così facendo viene facilitata l’estrazione del segnali di clock da parte del modem
ricevitore che deve essere provvisto di un circuito Descrambler in grado di riconoscere le
sequenze casuali di bit in modo da ricostruire i dati inviati dal modem trasmettitore.
4.5.1. Funzionamento e schema logico di Scrambler e Descrambler
In fig. 8 si mostra lo schema logico di uno Scrambler in trasmissione e di un
Descrambler in ricezione:
Fig. 8 – Schema logico di Scrambler e Descrambler
Entrambi sono costituiti da un registro a scorrimento a 7 bit caricati con la stessa
configurazione (Q1, Q2, Q3, Q4, Q5, Q6, Q7) e con segnali di clock sincronizzati tra loro.
Per quanto riguarda lo Scrambler, la linea di ingresso dati (indicata con A) proviene dal
DTE trasmettitore; l’uscita Y1 è applicata all’ingresso del registro invece la linea Y,
denominata uscita dati, va applicata al circuito modulatore. Per quanto riguarda il
Descrambler, la linea di ingresso dati proviene dal demodulatore; l’uscita Y1 è applicata
21
anche in questo caso all’ingresso del registro invece la linea d’uscita dati (indicata con B),
va applicata al DTE ricevitore.
Così facendo nel caso di una corretta trasmissione in linea si ha:
Y1 = Q1 ⊕ Q7 [Segnale generato dallo scrambler e dal descrambler];
Y = Y1 ⊕ A [Segnale digitale da trasmettere in linea dallo scrambler];
B = Y1 ⊕ Y = Y1 ⊕ Y1 ⊕ A [Segnale digitale convertito dal descrambler]
Poiché:
Y1 ⊕ Y1 = 0 e A ⊕ 0 = A
Si ottiene:
B=A
22
TDP (TECNOLOGIA DISEGNO E PROGETTAZIONE)
TRASDUTTORI
1. Generalità
In campo elettronico si definisce trasduttore o sensore un dispositivo che converte una
grandezza fisica in segnale elettrico. Esistono diversi tipi di trasduttori: la
termoresistenza, ad esempio, è un trasduttore di temperatura in quanto modifica il
valore resistivo al variare della temperatura; così facendo se viene inserita in un circuito
elettrico alimentato con un generatore di tensione costante, la corrente nel dispositivo
dipende dalla temperatura. Le fotoresistenze sono invece trasduttori di luminosità in
quanto trasformano l'energia luminosa in energia elettrica; i microfoni sono trasduttori che
trasformano l'energia acustica in energia elettrica; le dinamo trasformano l'energia
meccanica di rotazione in energia elettrica; i potenziometri trasformano una posizione
lineare o angolare in un valore resistivo e quindi in una tensione.
Esaminiamo alcune tipologie di trasduttori.
2. Trasduttori di temperatura
I trasduttori di temperatura sono dispositivi che consentono di trasformare una
temperatura in un segnale elettrico ad essa proporzionale.
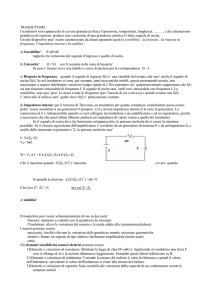
2.1. Termocoppia
La termocoppia è un trasduttore di temperatura costituito da due metalli diversi saldati
tra di loro ad un’estremità e basa il suo funzionamento sull'effetto Seebeck. Riscaldando
alla temperatura Tc il punto di saldatura dei due metalli diversi, alle due estremità libere
poste alla temperatura di riferimento Tr, si ottiene una piccola forza elettromotrice
proporzionale alla differenza tra Tc e Tr:
e = α·(Tc – Tr)
dove α è il coefficiente di Seebeck espresso in µV/°C che dipende dalla natura dei due
metalli costituenti il giunto e, purtroppo, dalla temperatura. Sebbene la linearità di
funzionamento sia limitata a piccole variazioni di temperatura, le termocoppie trovano
applicazione grazie all'ampio campo di temperatura sopportabile.
Se si collega la termocoppia ad un voltmetro, si generano due giunzioni fredde e quindi la
forza elettromotrice indicata dallo strumento di misura, dipenderà anche dalle forze
elettromotrici di queste due nuove giunzioni fredde.
Per eliminare tale inconveniente si utilizza un'altra termocoppia Jr, il cui giunto caldo è
posto ad una temperatura di riferimento Tr ed i cavi di collegamento al voltmetro sono in
rame in modo da eliminare la presenza dell'effetto Seebeck sui contatti del voltmetro
stesso. In fig. 1 si mostra il simbolo di una termocoppia e il collegamento di due
termocoppie per eliminare la forza elettromotrice di giunzione ai morsetti del voltmetro:
23
Fig. 1 – Simbolo di una termocoppia e collegamento di due termocoppie per eliminare la f.e.m. di giunzione ai morsetti del voltmetro
3. Trasduttori di posizione
I trasduttori di posizione sono dispositivi che trasformano una posizione lineare o
angolare in segnale elettrico.
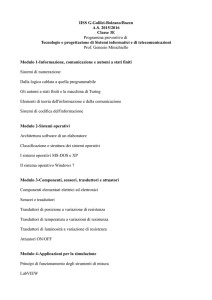
3.1. Trasformatori differenziali
I trasformatori differenziali sono dei trasduttori di posizione noti anche con il nome di
trasformatori ad E per la sagoma del nucleo magnetico. Essi sono costituiti quindi da tre
colonne: sulle due colonne esterne sono disposti in serie due avvolgimenti in opposizione
di fase; sulla colonna centrale, invece, è applicato un avvolgimento alimentato con una
tensione alternata Vi.
Sul nucleo è inserita una traversa mobile in grado di scorrere verso destra o verso sinistra.
In particolare se la traversa è in posizione perfettamente simmetrica rispetto alla
colonna centrale, le forze elettromotrici indotte sugli avvolgimenti delle colonne laterali V1
V2 sono uguali ed opposte per cui la tensione di uscita Vu è nulla; invece spostando la
traversa mobile verso destra o sinistra aumenta l'accoppiamento magnetico verso una
colonna e diminuisce quello verso l'altra colonna. Così facendo le due forze elettromotrici
indotte nelle colonne laterali sono diverse tra loro e di conseguenza la tensione di uscita
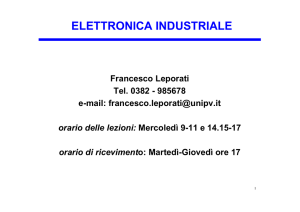
Vu non è più nulla ma al contrario aumenta a seconda dello spostamento laterale x della
traversa mobile. In particolare il modulo di Vu è proporzionale allo spostamento mentre
lo sfasamento φ ne indica la direzione; si osservi infine che la tensione di uscita Vu è
alternata e quindi per renderla continua e proporzionale allo spostamento x si utilizza un
raddrizzatore a doppia semionda con un filtro capacitivo come nei normali alimentatori.
In fig. 2 si mostra la costituzione e lo schema elettrico equivalente di un trasformatore
differenziale invece in fig. 3 si mostrano gli andamenti di ampiezza e fase in funzione dello
spostamento x:
Fig. 2 – Costituzione e schema elettrico equivalente di un trasformatore differenziale
24
Fig. 3 – Andamenti di ampiezza e fase relativi ad un trasformatore differenziale in funzione dello spostamento x
4. Trasduttori di velocità
I trasduttori di velocità sono dispositivi che forniscono una grandezza elettrica
proporzionale alla velocità lineare o di rotazione di un oggetto in movimento.
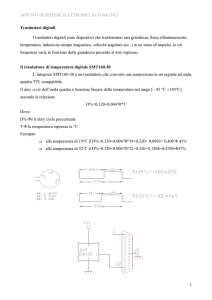
4.1. Dinamo tachimetrica
La dinamo tachimetrica è un classico trasduttore di velocità la cui struttura è analoga a
quella di una comune dinamo ad eccitazione indipendente. In fig. 4 si mostra lo schema
elettrico equivalente e la curva caratteristica di una dinamo tachimetrica:
Fig. 4 – Schema elettrico e curva caratteristica di una dinamo tachimetrica
Il flusso di eccitazione Φ viene mantenuto costante dalla tensione continua applicata
all'avvolgimento di eccitazione. È noto che in una comune dinamo ad eccitazione
indipendente la tensione di uscita Vo vale:
Vo = K·Φ·n
dove:
K è una costante costruttiva della macchina elettrica;
Φ è il flusso magnetico;
n è il numero di giri al minuto del rotore.
Ponendo KT = K·Φ si ottiene:
Vo = KT·n
Da cui si evidenzia il legame di proporzionalità esistente tra velocità di rotazione e la
tensione di uscita della dinamo.
I principali difetti di una dinamo tachimetrica sono:
1 tensione di uscita affetta da ondulazione dovuta al sistema di raddrizzamento collettorespazzole, tipico delle dinamo;
2 usura delle spazzole e conseguente periodica manutenzione e sostituzione;
3 elevato errore di linearità tipicamente contenuto entro il 2%.
Tutti questi difetti possono essere in parte compensati mediante l'uso di un alternatore
tachimetrico (non presenta i difetti dovuti al sistema di raddrizzamento colletore-spazzole)
25
e la tensione alternata fornita in uscita viene resa continua utilizzando un alimentatore
stabilizzato.
5. Trasduttori di campo magnetico
I trasduttori di campo magnetico sono dispositivi in grado di fornire una tensione
proporzionale al campo magnetico incidente sul trasduttore.
5.1. Trasduttori ad effetto Hall
I trasduttori ad effetto Hall sono dei trasduttori di campo magnetico costituiti da una
barretta di semiconduttore, ad esempio arseniuro di gallio, drogato tipo N o P e basa il suo
funzionamento sull'effetto Hall. Se un semiconduttore viene attraversato da una corrente I
ed è immerso in un campo di induzione magnetica B, si sviluppa una forza
elettomagnetica (forza di Lorenz) perpendicolare al campo B e alla corrente I che
provoca un addensamento di cariche su una delle facce del semiconduttore. Così facendo
si genera una tensione VH pari a:
VH = K·B·I
dove K è una costante che dipende dalle dimensioni fisiche della barretta, dal drogaggio e
dal tipo di semiconduttore impiegato. In fig. 5 si mostra la struttura di un trasduttore ad
effetto Hall:
Fig. 5 – Schematizzazione di un trasduttore ad effetto Hall
I trasduttori ad effetto Hall servono a rilevare la presenza o la variazione di un campo
magnetico che investe la barretta di semiconduttore. Nei casi pratici si possono avere due
situazioni:
- il campo magnetico è generato da un magnete solidale a un oggetto in movimento;
- il campo magnetico è generato da un circuito solidale con il trasduttore stesso.
Nel primo caso, quando l’oggetto magnetizzato si avvicina al trasduttore, provoca un
aumento sensibile della tensione VH; nel secondo caso, la variazione di VH è dovuta al
fatto che un oggetto ferroso, avvicinandosi al trasduttore, provoca una variazione
dell’induzione che investe la barretta di semiconduttore.
In commercio è possibile trovare trasduttori ad effetto Hall integrati che possono essere
di tipo lineare oppure di tipo on-off. I trasduttori di tipo lineare forniscono una tensione
VH che cresce in maniera proporzionale all’intensità del campo magnetico e sono utilizzati
26
quando è richiesto un rilevamento continuo della posizione di un oggetto, mentre quelli di
tipo on-off vengono utilizzati quando è richiesta un’azione di tipo switching.
27
ITALIANO/STORIA
L’INDUSTRIALIZZAZIONE ITALIANA TRA ‘800 E ‘900
1. L’industrializzazione dei paesi in ritardo
Alcuni paesi a struttura prevalentemente agraria imboccarono la via dell'industrializzazione
quando in una parte del mondo esisteva già un'economia industriale avanzata e
tendenzialmente monopolistica.
I casi più importanti e significativi furono quelli del Giappone, dell'Italia e della Russia; in
particolare, per l'Italia, la premessa dello sviluppo economico moderno fu il
conseguimento dell'unità e dell'indipendenza.
In ognuno di questi paesi i problemi dell'industrializzazione furono affrontati in maniera
particolare ed i sistemi economici che ne derivarono ebbero non solo caratteri propri ma
anche alcune caratteristiche comuni come la funzione assai maggiore dello Stato e la
permanenza di condizioni di arretratezza nelle campagne.
2. Lo sviluppo economico degli anni Ottanta
Intorno al 1880 si verificò una svolta nell'economia italiana. Si manifestò infatti una grave
crisi agraria, che si inseriva in una generale depressione dell'economia europea. La
causa principale fu la massiccia concorrenza dei cereali americani, russi e di alcuni paesi
asiatici che si riversarono a basso prezzo sul mercato europeo grazie allo sviluppo dei
trasporti a vapore e della ferrovia; di conseguenza in Italia la crisi frenò la tendenza
all'investimento di capitali nella terra favorendo l'investimento nelle attività manifatturiere.
Tutto questo diede avvio all'espansione industriale del 1881-1887 che preparò il vero e
proprio decollo degli anni 1896-1914. La crescita riguardò tutti i settori, ma in particolare
l'industria siderurgica e meccanica.
In Italia comparvero inoltre attività industriali completamente nuove in questi anni e nello
specifico l'industria elettrica, l'industria chimica (soprattutto quella della gomma) e
l'industria estrattiva; fondamentale era il ruolo svolto dalle banche che finanziavano
questi nuovi settori produttivi.
Gli industriali chiesero ed ottennero dallo Stato una politica di protezionismo doganale e
vennero quindi applicate tariffe che scoraggiavano l'importazione di beni e prodotti
dall'estero ma tutelavano la produzione interna; questo fu il segno della cosiddetta “svolta
protezionistica” nel campo della politica economica dello Stato italiano.
3. Una società moderna e industrializzata
Fra il 1896 e 1914 in Italia si verificò una vera e propria “rivoluzione industriale”.
La crescita economica italiana si collegò ad un vasto progresso produttivo che interessò
vari Paesi europei, gli Stati Uniti ed il Giappone. Questo sviluppo dell'economia italiana
portò ad un aumento:
- del tasso di crescita medio annuo;
- del numero di addetti all'industria;
- degli investimenti in impianti e attrezzature produttive;
- del reddito pro capite;
- della quantità di materie prime importate e di manufatti esportati;
- delle masse di lavoratori provenienti dalle campagne (urbanizzazione).
Fu questo il periodo in cui si formò il cosiddetto triangolo industriale, comprendente il
Piemonte, la Lombardia e la Liguria. Infatti in queste regioni il processo di sviluppo
28
dell'agricoltura aveva già raggiunto un sufficiente grado di maturità ed aveva dato luogo ad
un'intensa accumulazione capitalistica.
4. Le caratteristiche del decollo industriale italiano
Lo sviluppo economico dei primi decenni del Novecento fu caratterizzato da due
significative novità: l'uso di nuove fonti energetiche e l'applicazione di nuove tecniche,
che portarono profonde trasformazioni della società e delle condizioni di vita.
La crescita industriale dell'Italia non fu dominata solo da queste innovazioni tecnologiche
ma fu dovuta anche:
- alla politica protezionistica del governo che favoriva soprattutto la siderurgia;
- alla nuova classe di imprenditori dinamici ed agguerriti, il cui massimo
rappresentante fu considerato Giovanni Agnelli che nel 1899 fondò la Fiat;
- al ruolo svolto dalle banche che assicuravano i finanziamenti necessari alle
aziende.
Gli stabilimenti di maggiori dimensioni e dotati di apparecchiature avanzate erano però
concentrati al Nord, soprattutto in Piemonte e in Lombardia, mentre le regioni meridionali
rimasero escluse dalla crescita industriale. Per questo motivo il processo di
industrializzazione non eliminò gli squilibri esistenti nel paese, e in primo luogo quello tra
Nord e Sud, che al contrario si stava aggravando.
5. Il decollo industriale
Tra la fine dell'Ottocento e l'inizio del Novecento nacque
anche
l'industria
automobilistica,
concentrata
soprattutto a Torino e Milano. Nel 1899 tra le 26 imprese
automobilistiche presenti in Italia, a predominare fu la Fiat.
Nel 1908, a Ivrea, per iniziativa di Camillo Olivetti sorse
una fabbrica di macchine per scrivere destinata ad
occupare una posizione importante nel panorama
economico italiano.
L'industria elettrica ebbe notevole incremento e suscitò
grandi entusiasmi perché l'Italia è priva di carbone, che a
quei tempi era la principale fonte di energia e doveva
essere importato, e con la diffusione dell'elettricità si
pensava di liberare il Paese dalla dipendenza estera;
tuttavia, nonostante i progressi, la produzione di energia
elettrica rimaneva inferiore al fabbisogno.
Un altro settore in espansione fu quello chimico, che
intensificò la produzione di fertilizzanti e di prodotti di
gomma; in particolare nel 1872 venne fondata a Milano la
Pirelli, la più grande fabbrica di gomma.
Loghi Fiat
Atto costitutivo Fiat
29
Manifesto Olivetti
Aereoplani da guerra
6. La mobilitazione industriale in Italia
L'intervento dell'Italia nella prima guerra mondiale, deciso nel maggio 1915, fu voluto
soprattutto dagli industriali appartenenti al settore siderurgico e meccanico, che
vedevano nel conflitto la possibilità di realizzare grandi profitti.
A partire dal 1916 vennero ingrandite le officine già esistenti, se ne crearono di nuove,
venne incrementata la produzione e per questo motivo fu necessario assumere nuova
manodopera, anche non qualificata come ad esempio le donne.
Anche le officine ausiliarie, cioè tutte quelle imprese che producevano per l'esercito e per
la marina, crebbero di numero e si moltiplicarono nel corso della guerra soprattutto grazie
ai settori siderurgico e meccanico destinati a fornire armi e mezzi di trasporto.
La guerra favorì inoltre la nascita di un nuovo settore, quello aereonautico. Infatti dal
1916 in Italia cominciarono ad essere prodotti aeroplani da guerra, che prima venivano
acquistati dall'estero.
Nel frattempo l'industria chimica forniva esplosivi e gas asfissianti mentre i lanifici e i
cotonifici fornivano ai soldati divise e scarpe
30
7. I problemi della riconversione
Terminata la guerra, occorreva attuare la riconversione, cioè trasformare l'apparato
industriale che non doveva più rispondere alle necessità della guerra. Così facendo si
aprirono gravi problemi:
- molti stabilimenti erano stati potenziati in modo eccessivo e dovettero essere
ridimensionati;
- alcune produzioni legate alla guerra non erano più necessarie in tempo di pace;
- la manodopera, che era cresciuta notevolmente, veniva ora licenziata;
- lo Stato aveva sostenuto spese di guerra così elevate che il bilancio era in deficit
gravissimo;
- i reduci, cioè coloro che tornavano dal fronte, si trovarono disoccupati.
Per tutti questi motivi gli anni del dopoguerra furono caratterizzati da scioperi ed
agitazioni che portarono, nel 1920, all'occupazione delle fabbriche di Torino da parte degli
operai.
8. La ripresa degli anni Venti
Quando Mussolini conquistò il potere, dopo la
marcia su Roma del 28 ottobre 1922,
l'economia mondiale era in una fase di ripresa.
In Italia il governo fascista attuò inizialmente
una politica economica liberista, volta cioè a
limitare l'intervento dello Stato ed a favorire
l'iniziativa dei privati.
Dal punto di vista produttivo, gli anni Venti
videro una notevole espansione. Infatti la
produzione manifatturiera dal 1921 al 1926
crebbe e di conseguenza la disoccupazione si
ridusse in maniera consistente.
Nel 1926 venne fondata l’AGIP (Azienda
Generale Italiana Petroli) che doveva occuparsi
della ricerca e della distribuzione di petrolio.
L'industria meccanica sviluppò i settori
preesistenti e si specializzò in produzioni nuove
e più raffinate: macchine da cucire (Necchi),
macchine per scrivere (Olivetti), apparecchi
radio (Marelli), macchinari per la tipografia
(Nebiolo); nel settore chimico invece si verificò
un vero e proprio boom delle fibre artificiali, la
cui produzione iniziò durante la guerra, per la
scarsezza e la difficoltà di approvvigionamento
del fibre naturali.
Logo AGIP
Macchina da cucine Necchi
31
Macchina per scrivere Olivetti
Macchinario Nebiolo per la tipografia
Radio Marelli
9. La politica autarchia
A partire dal 1926 venne messa in atto una svolta nella politica economica del regime, che
abbandonò la linea liberista per attuare un intervento sempre più pesante nell'economia.
Venne così inaugurata una politica autarchica.
L'autarchia è una politica economica che mira all'autosufficienza ed in particolare, quella
voluta dal regime fascista, ebbe conseguenze pesanti per l'economia italiana e determinò
un peggioramento delle condizioni di vita della popolazione.
Per quanto riguarda invece l'industria, l'autarchia ne causò l'arretratezza poiché il mercato
era limitato.
10. La crisi del 1929 e le sue conseguenze
La gravissima crisi economica che colpì gli Stati Uniti nel 1929 travolse tutta l'Europa.
Anche l'Italia venne coinvolta dalla "grande depressione" e di conseguenza molte
aziende dovettero chiudere o licenziare manodopera; così facendo il numero dei
disoccupati crebbe.
Lo Stato si assunse quindi il compito di finanziare le industrie, "salvando" quelle che erano
più in crisi, e di gestire direttamente alcune attività industriali.
Nel triennio 1931-1933 vennero così istituiti due organismi che ebbero poi un grande peso
nell'economia e nella politica italiana:
- l’IMI (Istituto Mobiliare Italiano) con cui lo Stato assicurava alle industrie il credito
che le banche non erano più in grado di sostenere;
- l’IRI (Istituto per la Ricostruzione Industriale) con cui lo Stato diventava proprietario
di alcune società impegnandosi a risollevarle per poi rivenderle ai privati.
Alla vigilia della seconda guerra mondiale esso possedeva il 44% del capitale azionario
esistente in Italia e attraverso l’IRI lo Stato ha mantenuto il possesso di molte imprese fino
ai giorni nostri.
32
Loghi dei due organismi istituiti nel triennio 1931-1933 (IMI e IRI)
11. L'industria italiana alla vigilia della seconda guerra mondiale
La guerra scoppiata nel settembre 1939 sembrava un'ottima occasione per intensificare la
produzione ed accrescere i profitti.
Nel giugno 1940 l'Italia entrò in guerra ma era assolutamente impreparata in quanto
mancavano le armi, i mezzi di trasporto e gli equipaggiamenti.
Così, mentre la prima guerra mondiale stimolò la produzione industriale, la seconda ne
provocò la caduta; inoltre la disastrosa sconfitta mise il Paese di fronte alla necessità di
ricostruire completamente il proprio assetto politico, economico e istituzionale.
12. I problemi economico-sociali del dopoguerra
Le condizioni materiali dell'Italia all'indomani della seconda guerra mondiale erano
disastrose.
Infatti nelle grandi città più della metà degli edifici aveva subito distruzioni o danni a
causa dei bombardamenti, la rete ferroviaria e stradale era distrutta e mancavano
prodotti di prima necessità per la popolazione.
Due problemi economico-sociali si presentarono ai governi del dopoguerra:
1. l'inflazione: i prezzi aumentavano vertiginosamente e il potere d'acquisto della
moneta diminuiva creando gravi difficoltà sia ai consumatori che alle imprese;
2. la disoccupazione: molti italiani erano senza lavoro, altri non avevano attività a
tempo pieno.
Tutto questo derivava soprattutto dalla difficoltà di riorganizzare le attività produttive
dovuta a diversi fattori:
- i trasporti erano nel caos e per questo motivo non potevano viaggiare né le materie
prime né i prodotti;
- erano venute a mancare le ordinazioni dello Stato su cui si basava soprattutto
l'industria pesante;
- i macchinari erano stati sottoposti ad un'intensa usura nel periodo della guerra e si
presentavano quindi inefficienti ed arretrati;
- la popolazione era impoverita e, non potendo acquistare grandi quantità di beni, il
mercato interno era ristretto.
L'obiettivo che tutto il Paese si propose al termine del conflitto fu quello di “ricostruire”
materialmente e moralmente l'Italia e per questo motivo gli anni dal 1945 e 1950
rappresentano il periodo della "ricostruzione".
13. La “ricostruzione” fra iniziativa della popolazione e aiuti stranieri
L'operosità, la tenacia e la speranza degli Italiani furono1947); la nazione che riceveva i
del
Piano
decisive per la ripresa dell'economia ma la ricostruzionefinanziamenti
fu anche resa possibile dai notevoli finanziamentiMarshall doveva impegnarsi ad
garantiti dagli Stati Uniti, che nel dopoguerra avevanoacquistare prodotti finiti presso
le industrie americane.
una posizione di supremazia nell'economia mondiale.
Gli aiuti americani vennero erogati attraverso ilI governi italiani del dopoguerra
programma conosciuto come Piano Marshall (dal nomefecero inoltre delle scelte
del segretario di Stato americano che lo propose nelsignificative in quanto:
33
-
venne abbandonata la politica di controllo e di
intervento dello Stato sull'economia lasciando
spazio all'iniziativa privata;
- vennero ripristinati e incentivati i commerci con
l'estero che inserirono il Paese nell'economia
internazionale.
Per favorire gli scambi con l'estero furono riviste le tariffe
doganali, limitando gradualmente il protezionismo, e si
stipularono trattati commerciali con alcuni Paesi europei
per rendere più agevoli pagamenti.
Poster del piano Marshall
George Catlett Marshall
14. L’industria italiana negli anni della ricostruzione
Gli scambi con l'estero misero l'Italia a confronto con(Ente Nazionale per l'Energia
economie più avanzate e industrializzate, stimolandoElettrica) con cui lo Stato si
il desiderio di migliorare le applicazioni tecnologicheassumeva
il
monopolio
della
e le condizioni di vita.
produzione e della distribuzione di
Determinanti furono inoltre gli aiuti americanienergia elettrica.
provenienti dal Piano Marshall che vennero utilizzati
in Italia a vantaggio dell'industria, in particolare per
l'acquisto di macchine e attrezzature. Tali acquisti
riguardavano soprattutto i settori siderurgico,
elettrico e meccanico che richiedevano investimenti
più consistenti e che trovavano una temibile
concorrenza sul piano internazionale.
Per quanto riguarda la siderurgia fu determinante la
figura di Oscar Sinigaglia, un dirigente della
Finsider, gruppo che raccoglieva tutte le maggiori
acciaierie di proprietà dello Stato attraverso l’IRI
(Istituto per la Ricostruzione Industriale); importante
fu anche l'adesione alla CECA (Comunità Europea
del Carbone e dell’Acciaio) che assicurava all'Italia
l'approvvigionamento di materie prime.
Per favorire invece la meccanica venne creato il FIM
(Fondo Industrie Meccaniche) che forniva prestiti a
Logo e Paesi appartenenti alla CECA
tutte quelle industrie che si trovavano in difficoltà o
che erano intenzionate a rinnovare gli impianti.
Per il settore elettrico vennero costruiti nuovi
impianti idroelettrici e nel 1962 venne creato l’ENEL
34
Logo e Paesi di ubicazione dell’Enel
15. Il “miracolo economico” italiano
Nel periodo che va dal 1953 al 1963 un impetuoso e veloce sviluppo industriale trasformò
in Italia il modo di vivere, le abitudini della popolazione, l'aspetto delle città e il paesaggio.
Si parlò allora di un "miracolo" perché nessuno aveva previsto uno sviluppo simile,
nonostante le indubbie capacità di ripresa mostrate dall'economia italiana negli anni del
dopoguerra. Questa fase viene anche chiamata boom, termine inglese che indica appunto
un momento di rapida espansione economica.
Molteplici fattori furono alla base del "miracolo economico":
- una ampia disponibilità di manodopera: infatti era elevato sia il numero di
disoccupati sia il numero di immigrati dal Sud che potevano essere inseriti
nell'industria;
- i salari relativamente bassi che incidevano poco sul costo del prodotto finito;
- i bassi prezzi delle materie prime di cui l'Italia aveva bisogno;
- l'adozione di tecniche avanzate assorbite da altri Paesi che le avevano elaborate e
sperimentate.
Occorre inoltre aggiungere la spinta data da tutte quelle persone che desideravano
raggiungere il benessere, lasciando alle spalle gli anni difficili e bui della guerra.
16. I prodotti dell'industria nella vita quotidiana degli italiani
Il vero e proprio boom dell'industria meccanica,
petrolchimica e automobilistica fu reso possibile
anche dallo sviluppo della produzione di acciaio: infatti
tra il 1956 il 1959 il settore siderurgico ricevette un
tale impulso che l'Italia, da essere Paese importatore,
divenne esportatore.
Vespa
Logo ENI
35
Lambretta
Fiat Seicento
Fiat Cinquecento
36
17. Il decennio 1963-1973
La sorprendente espansione iniziata negli anni Cinquanta proseguì fino al 1963: infatti a
partire da quell'anno l'economia italiana entrò in una fase di depressione che si prolungò
per circa un decennio.
Questa crisi mise in evidenza alcuni squilibri del processo di sviluppo che si verificò negli
anni del boom:
- il "miracolo" interessò prevalentemente il Nord ed era stato possibile anche grazie
all'immigrazione di manodopera proveniente dal Meridione;
- lo Stato non aveva offerto alle masse di popolazione case, scuole e servizi
adeguati;
- il "miracolo" aveva interessato industrie tradizionali mentre erano rimasti arretrati i
settori ad alta tecnologia come quello dell'elettronica.
Le cause che innescarono la crisi furono:
- l'aumento dei salari dovuto al fatto che la forza contrattuale delle masse operaie
concentrate nelle fabbriche del Nord crebbe e contemporaneamente si rafforzarono
i sindacati;
- l'aumento dei prezzi dei prodotti in vendita;
- la forte inflazione dovuta all'aumento dei prezzi;
- la riduzione degli investimenti delle aziende che determinarono un calo della
produzione e un aumento della disoccupazione.
Per rispondere alla crisi vennero adottate alcune modifiche nell'organizzazione del lavoro
che portarono ad una momentanea ripresa della produzione: infatti tra il 1969 e il 1973 si
assistette in Italia ad una vera e propria esplosione di scioperi.
Nel 1973 un nuovo grave evento colpì la nostra economia in quanto si verificò una grande
crisi energetica dovuta all’aumento dei prezzi del petrolio.
Così facendo la situazione divenne critica per l'Italia data la forte dipendenza dall'estero
per l'approvvigionamento di fonti energetiche.
18. L’industria elettronica
Negli stessi anni in cui l'Italia produceva ed esportava le proprie costruzioni
elettromeccaniche, dando prova di ingegnosità tecnica e capacità imprenditoriale, essa
manifestava un grave ritardo nel campo dell'industria elettronica.
Infatti, mentre gli Stati Uniti erano i grandi dominatori, in Italia solo la Olivetti, che era
l'unica impresa totalmente italiana, si era lanciata nella produzione di calcolatori; le altre
come Siemens, CGE e Philips erano collegate gruppi stranieri per ragioni finanziarie e
tecnologiche.
Logo Siemens e Philips
In Italia la fabbricazione di prodotti elettronici di consumo non copre nemmeno la metà del
fabbisogno interno; al contrario sono stati conseguiti risultati migliori nel caso della
microelettronica grazie alla costituzione, nel 1987, della SGS-Thomson, un'associazione
di imprese italo-francese attiva nel campo dei semiconduttori. Questa impresa, guidata da
un manager italiano, ha saputo non solo offrire prodotti competitivi, ma anche stringere
rapporti di collaborazione con altre industrie europee e con i "nemici" giapponesi che
rappresentano oggi i principali concorrenti mondiali.
Occorre dire infine che la scarsa presenza dell'industria italiana nei settori ad alta
tecnologia rimane un problema fondamentale degli anni Novanta.
DIRITTO
L’ATTIVITÀ ECONOMICA E L’AZIENDA
1. L'attività economica
Durante la sua vita all'uomo avverte una serie di bisogni.
I bisogni sono degli stati di insoddisfazione che interessano le persone.
Essi si dividono in bisogni autonomi e bisogni indotti dall'esterno. I bisogni autonomi
nascono in ognuno di noi senza i condizionamenti delle aziende invece bisogni indotti
sono quelli "costruiti" dalle aziende e che normalmente hanno un costo maggiore. Inoltre vi
sono bisogni essenziali come bere, mangiare, vestirsi e bisogni secondari come istruirsi,
viaggiare, divertirsi.
Per soddisfare tutti questi bisogni l'uomo deve procurarsi dei mezzi idonei detti beni che
devono essere disponibili in modo limitato (beni economici).
Dal bisogno ha origine l'attività economica, cioè l'insieme delle azioni compiute dall'uomo
per procurarsi i beni e i servizi utili in modo da soddisfare il bisogno stesso.
Nell'attività economica possiamo distinguere quattro fasi:
- la produzione che rappresenta l'insieme delle operazioni che devono essere
compiute per ottenere i beni necessari a soddisfare i bisogni;
- lo scambio che rappresenta il momento in cui i beni vengono ceduti in cambio di
moneta;
- il consumo che rappresenta il momento in cui si esaurisce il bene o il servizio in
modo da soddisfare dei bisogni specifici;
- il risparmio che consiste nel rinunciare al consumo immediato di una parte di beni
e servizi in modo da soddisfare bisogni futuri.
Il concetto di bene richiama quello di fisicità in quanto il bene può essere toccato, se ne
può ammirare il colore e la forma; invece il servizio consiste in una prestazione priva di
consistenza fisica.
L'attività di produzione, che consiste nell'accrescimento delle risorse disponibili in un certo
momento si distingue in:
Diretta:
la produzione fisica di beni e prestazione di servizi che consiste nell'utilizzare
alcuni beni per ottenerne altri di diverso tipo
Indiretta:
il trasferimento di beni nello spazio che consiste nel rendere disponibili alcuni
beni in luoghi diversi da quelli di provenienza
il trasferimento di beni nel tempo che consiste nel conservare alcuni beni per
renderli disponibili in casi di scarsità o di mancanza
Inoltre, per realizzare l'attività di produzione, occorre avere a disposizione diversi fattori
produttivi che si distinguono in risorse naturali, lavoro umano, capitale.
2. Concetto di azienda
L'azienda è un istituto economico destinato a durare nel tempo che produce beni e servizi
per soddisfare i bisogni umani.
Gli elementi costitutivi dell'azienda sono:
- un'organizzazione stabile cioè creata per compiere operazioni durature in modo da
far esistere l'organismo aziendale per periodi di tempo medio-lunghi;
- un insieme di persone che partecipano allo svolgimento dell'attività aziendale;
- un complesso di beni economici (immobili, attrezzature, autoveicoli…) che possono
essere destinati allo scambio sul mercato o utilizzati nell'azienda sia come beni di
consumo che come fattori produttivi. L'insieme dei beni economici rappresenta il
patrimonio dell'azienda;
- un fine da raggiungere che consiste nel soddisfare i bisogni umani attraverso i
processi di produzione (soddisfacimento indiretto) o di consumo (soddisfacimento
diretto);
- un insieme ordinato e sistematico di operazioni messe in atto dalle persone per
raggiungere il fine aziendale.
3. L'azienda come sistema
L’azienda può essere considerata con un sistema cioè un insieme di uomini e mezzi
combinati tra loro al fine di raggiungere uno scopo specifico, interagendo con l'ambiente
circostante.
L'azienda è un sistema:
- aperto in quanto devono esserci continue relazioni di scambio con l'ambiente in cui
opera;
- socio-tecnico in quanto è formata da persone e un'organizzazione tecnica
costituita da impianti e attrezzature;
- finalizzato perché tende al raggiungimento di un obiettivo generale e cioè
soddisfare i bisogni umani;
- dinamico in quanto è destinata a mutare nel corso del tempo;
- autoregolato in quanto i risultati ottenuti nel passato rappresentano delle
indicazioni per l'attività futura;
- economico in quanto è rivolto a soddisfare bisogni illimitati utilizzando risorse
limitate.
Inoltre l'azienda:
- riceve dal mondo esterno degli input (capitale, materie prime, conoscenze
scientifiche e tecniche…) e li trasforma;
- ottiene degli output che vengono ritrasmessi all'ambiente sotto forma di prodotti e
servizi.
Quando si parla di ambiente ci si riferisce non solo ai mercati in cui l'azienda opera, ma
anche all'ambiente generale inteso come sistema di elementi di varia natura dei quali
l'azienda deve tener conto per sopravvivere e svilupparsi.
Il sistema-ambiente è di tipo:
- fisico-naturale cioè riferito alle condizioni naturali del territorio che condiziona la
presenza o meno di materie prime e il tipo di trasporti;
- culturale cioè riferito al complesso di conoscenze e di ideologie che determinano i
comportamenti delle persone;
- tecnologico cioè riferito al complesso di conoscenze di tipo scientifico e
tecnologico che stimolano all'adozione di tecniche sempre più sofisticate ed
economiche;
- sociale in quanto rappresenta il risultato della suddivisione della società in gruppi e
comporta la possibilità di passare da un gruppo sociale all'altro;
- economico cioè rappresentato dal sistema generale dell'economia che regola la
vita della collettività;
- politico-legislativo cioè definito dalla forma di governo e dall'ordinamento
giuridico-legislativo di un certo paese e condiziona le norme riguardanti l'attività
commerciale e i rapporti di lavoro.
Inoltre l'azienda può operare in due tipologie di mercato:
- mercato di acquisto dei fattori produttivi;
- mercato di vendita dei beni e servizi prodotti.
I mercati di approvvigionamento dei fattori produttivi sono:
- mercato del lavoro;
- mercato delle tecnologie;
- mercato delle materie prime;
- mercato delle fonti di energia;
- mercato dei capitali.
L’azienda, per svolgere le sue attività e realizzare i suoi obiettivi, deve adattarsi alle
condizioni dell'ambiente in cui opera e di conseguenza ne può anche modificare la
struttura esterna che lo circonda.
4. La classificazione delle aziende
Le aziende sono classificabili in base:
- al fine che tendono raggiungere;
- al luogo in cui operano;
- alla natura giuridica del soggetto che assume i diritti e gli obblighi derivanti
dall'attività aziendale;
- alle dimensioni.
Secondo il fine che intendono raggiungere, le aziende si possono distinguere in:
- aziende di produzione che producono beni e servizi da cedere a terzi attraverso lo
scambio con lo scopo di conseguire un utile cioè un guadagno;
- aziende di erogazione che attuano processi di consumo della ricchezza per
soddisfare direttamente i bisogni umani;
- aziende composte che sono composte da un'attività di consumo e un'attività di
produzione.
Inoltre, le aziende di produzione possono ulteriormente distinguersi in:
- aziende di produzione diretta dei beni che svolgono l'attività di produzione
attraverso processi di trasformazione, manipolazione e trattamento delle materie
prime;
- aziende di produzione indiretta dei beni che non trasformano le materie prime ma le
trasportano nel tempo nello spazio;
- aziende di servizi che svolgono attività di supporto di altre imprese o soggetti.
Invece, le aziende di erogazione possono ulteriormente distinguersi in:
- aziende pubbliche [pubblica amministrazione] ovvero lo Stato e gli enti locali (istituti
pubblici di assistenza e beneficenza, aziende degli enti istituzionali)
- aziende private [aziende no profit] ovvero le organizzative private che non
perseguono scopi di lucro ma vogliono erogare servizi utili alla collettività
(associazioni, fondazioni, comitati, cooperative sociali, organizzazioni di
volontariato)
Secondo il luogo in cui operano, le aziende si possono distinguere in:
- aziende indivise che esercitano la loro attività in una sede unica dove sono
localizzati i loro stabilimenti ed uffici;
- aziende divise che esercitano la loro attività in più punti del territorio e dispongono
di diversi stabilimenti ed uffici.
Secondo la natura giuridica del soggetto che assume i diritti e gli obblighi derivanti
dall'attività aziendale, le aziende si possono distinguere in:
- aziende pubbliche in cui il soggetto giuridico è sottoposto alle norme di diritto
pubblico;
- aziende private in cui il soggetto giuridico è sottoposta alle norme di diritto privato.
Le aziende private, a loro volta, possono essere:
- individuali se hanno per soggetto giuridico una singola persona;
- collettive se hanno per soggetto giuridico una pluralità di persone.
Il nostro ordinamento
caratteristiche:
Società di persone:
giuridico prevede due forme di società che hanno le seguenti
sono prive di personalità giuridica;
non vi sono organi della società;
rispondono delle obbligazioni sociali
personale dei soci.
con
la
responsabilità
Società di capitali:
sono provviste di personalità giuridica;
agiscono a mezzo dei propri organi;
rispondono delle obbligazioni sociali con il proprio patrimonio.
Sono società di persone:
la società semplice (SS);
la società in nome collettivo (SNC);
la società in accomandita semplice (SAS).
Sono società di capitali:
la società per azioni (SPA);
la società a responsabilità limitata (SRL);
la società in accomandita per azioni (SAPA).
Secondo il profilo dimensionale, infine, le aziende si possono distinguere in:
- aziende piccole;
- aziende medie;
- aziende grandi.
Per determinare le dimensioni dell'azienda si prendono in considerazione diversi
parametri:
- il fatturato annuo, cioè il numero delle vendite effettuate in un dato anno;
- il numero dei lavoratori dipendenti mediamente occupati nell'anno;
- il capitale investito nella produzione dell'anno;
- il valore aggiunto creato dall'impresa, cioè la differenza tra il valore finale della
produzione ed il costo delle materie impiegate per ottenerla;
- la capacità di produzione degli impianti.
MATEMATICA
GLI INTEGRALI DEFINITI E IMPROPRI
1. L'integrale definito e l’area del trapezoide
Data una funzione f(x) continua in un certo intervallo [a,b] si definisce integrale definito fra
a e b la differenza fra il valore assunto dalla primitiva calcolata nel punto b e il valore
assunto dalla primitiva calcolata nel punto a:
L’integrale definito è legato al calcolo delle aree. Infatti data una funzione f(x) continua e
positiva in un certo intervallo [a,b], si definisce trapezoide la parte di piano delimitata da
tale curva, dall'asse x e dalle rete x=a e x=b (Fig. 1).
Fig. 1 - Trapezoide
Per poter calcolare l’area di questo trapezoide bisognerà quindi calcolare l'integrale
definito della funzione f(x) nell'intervallo [a,b] e lo si indica con:
Invece, se la funzione f(x) è continua ma non positiva, l'area del trapezoide sarà data da:
1.1. Le proprietà dell’integrale definito
Data una funzione f(x) continua in un certo intervallo [a,b] si può affermare che:
E cioè se gli estremi di integrazione coincidono, l'integrale è nullo.
E cioè invertendo gli estremi di integrazione, l'integrale ottenuto ha valore opposto di
quello dato.
E cioè se f(x) è continua in un intervallo [a,b] e il punto c appartiene all'intervallo, l'integrale
dato può essere scomposto in due integrali.
E cioè se f1(x), f2(x), …, fn(x) sono funzioni continue nell'intervallo [a,b], l'integrale dato può
essere scomposto in tanti integrali quante sono le funzioni.
E cioè se all'interno dell'integrale una costante k moltiplica la funzione, questa può essere
portata fuori dal simbolo di integrale.
1.2. Teorema del valor medio
Se f(x) è una funzione continua in un intervallo [a,b], esiste almeno un punto c interno
all’intervallo [a,b] per il quale vale la seguente relazione:
dove il valore f(c) si dice valor medio di f(x). Inoltre, dal punto di vista geometrico, il
teorema si può interpretare dicendo che f(c) è l’altezza del rettangolo di base b-a
equivalente al trapezoide.
2. Il calcolo delle aree
Come abbiamo visto, per determinare l'area della parte di piano compresa tra una curva e
l'asse x in determinato intervallo, si effettua Il calcolo di uno o più integrali definiti. E’
possibile inoltre determinare l’area S della regione di piano delimitata da due o più curve.
Infatti, date due funzioni f(x) e g(x) continue, positive e con f(x) ≥ g(x) definite in un
intervallo [a,b] (Fig. 2), si dimostra che l'area da esse racchiuse nell'intervallo è la
differenza fra l'area del trapezoide individuato dalla funzione f(x) e l'area del trapezoide
individuato dalla funzione g(x).
Fig. 2 – Parte di piano delimitata da due curve
Si ha perciò che:
e tenendo conto delle proprietà dell'integrale definito si può scrivere:
Inoltre la formula vale anche se una delle due funzioni o entrambe diventano negative
[supponendo sempre che f(x) ≥ g(x)] (Fig. 3).
Fig. 3 – Parte di piano delimitata da due curve di cui una diventa negativa
In generale quindi, possiamo dire che date due funzioni f(x) e g(x), continue in un intervallo
[a,b] e tali che f(x) ≥ g(x), l'area S della parte di piano delimitata dai loro grafici e dalle rette
x=a e x=b è:
Questa formula però vale solo quando le due curve f(x) e g(x) si intersecano nei punti di
ascissa a e b (Fig. 4).
Fig. 4 – Parte di piano delimitata da due curve che si intersecano tra loro
Invece se l'area da determinare è individuata da più funzioni che si intersecano tra loro
(Fig. 5) si ha a che:
e tenendo conto delle proprietà degli integrali definiti si può scrivere:
Fig. 5 – Parte di piano delimitata da più funzioni che si intersecano tra loro
In particolare esiste una regola per calcolare l'area della superficie racchiusa da più curve.
Se f1(x), f2(x), …, fn(x) sono le funzioni che delimitano una regione di piano si deve:
- fissare uno dei punti di intersezione come punto di partenza, ad esempio il punto di
ascissa a1 (Fig. 6) e si fissa il verso orario come verso di percorrenza del contorno
della regione di cui si vuole calcolare l'area;
- scrivere la somma degli integrali fra l'ascissa del punto di partenza e quella del
punto di arrivo delle funzioni che stiamo percorrendo fino a tornare al punto di
partenza:
Fig. 6 – Parte di piano racchiusa da più curve
3. Il volume di un solido di rotazione
Data una funzione f(x) continua e positiva in un certo intervallo [a,b] e indicando con T il
trapezoide individuato dalla curva e dall'asse x nell'intervallo [a,b] (Fig. 7a), si dimostra che
ruotando attorno all'asse x, T genera un solido di rotazione S (Fig. 7b) il cui volume lo si
può calcolare mediante un'integrale definito con la seguente formula:
Fig. 7a – Trapezoide T
Fig. 7b – Solido di rotazione S
Questa vale anche quando la funzione f(x) è negativa o lo diventa (Fig. 8) perché
comunque [f(x)]2 è sempre positiva o nulla.
Fig. 8 – La funzione diventa negativa
4. La lunghezza di un arco di linea piana e l'area di una superficie di rotazione
Oltre alla determinazione di aree e volumi, gli integrali definiti ci permettono di calcolare
anche la lunghezza di un arco di linea piana. Data una funzione f(x) continua e individuati i
punti A e B di ascisse rispettivamente a e b (Fig. 9), si dimostra che la lunghezza l di tale
tratto è data da:
Fig. 9 – Arco di linea piana
Inoltre, se si fa ruotare l'arco AB attorno all'asse x, si ottiene una superficie di rotazione la
cui area S si dimostra data da:
5. Gli integrali impropri
Per il calcolo di un'integrale definito, si è sempre partiti dal presupposto che la funzione
f(x) fosse continua nell'intervallo di integrazione [a,b]. Bisogna però vedere cosa accade
quando la funzione ha dei punti di discontinuità o quando uno degli estremi di integrazione
tende all'infinito. In questo caso si parla di integrali impropri.
5.1. La funzione non è continua in uno degli estremi di integrazione o in un punto
interno ad [a,b]
Se la funzione non è continua in b non possiamo usare la definizione di integrale che
conosciamo; tuttavia poiché essa è continua nell'intervallo [a,b-δ] con δ>0, la funzione f(x)
è integrabile in [a,b[ e si pone:
Se la funzione non è continua in a, di conseguenza non è continua nell'intervallo [a,b] ma
lo sarà in [a+ε,b] con ε>0; così facendo la funzione f(x) è integrabile in ]a,b] e si pone:
Se la funzione non è continua in un punto c interno ad [a,b] ma lo è in qualunque altro
punto di [a,b] si pone:
5.2. L'integrale è esteso ad intervalli illimitati
Se consideriamo adesso il caso di una funzione definita e continua in un intervallo [a,+∞],
la funzione è integrabile nell'intervallo [a,+∞] ponendo:
In modo analogo si pongono le definizioni nel caso in cui la funzione è definita
nell'intervallo [-∞,b] o è definita nell'intervallo [-∞,+∞];
nel primo caso si pone:
mentre nel secondo caso si pone:
6. Esercizi
Esercizio 1
Esercizio 2
Esercizio 3
Esercizio 4
Esercizio 5
Esercizio 6