DIPARTIMENTO DI INGEGNERIA DEI TRASPORTI ITS Mobilità Sostenibile Trasporto Ferroviario
Centro di Formazione Ferroviario
Corso di Tecnica e gestione dei trasporti
Francesco Murolo
Prof. Luigi Biggiero
“Generalità sui motori elettrici e sulle loro curve caratteristiche”
Seminario del 24 maggio 2016
Trazione: il propulsore
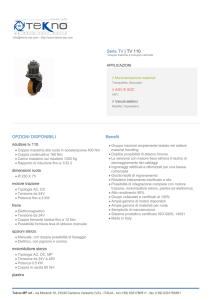
Il propulsore più utilizzato nel trasporto terrestre è la ruota motrice.
L’azione di una coppia motrice M, applicata ad un asse di un veicolo, sulla cui
estremità sia calettata una ruota, corrisponde a quella esercitate da una forza F,
applicata tangenzialmente alla ruota nel punto di contatto con la strada.
Le forze attive tangenziali F e il carico verticale Pa si trasmettono fra ruota e
strada attraverso l'area d'impronta (pochi cm2).
M F r
Si dice che si verificano le condizioni di
O
’
R
peso Pa ed alla forza tangenziale F se
essa rotola senza strisciare o slittare.
A f a Pa
r
aderenza per una ruota soggetta al
F
RF A
M
Pa
-F
A
O
2
Trasporto terrestre: il fenomeno dell’aderenza
Aumentando il valore di F il rotolamento continua finché si raggiunge il limite di
aderenza A oltre il quale l’aderenza cessa e la ruota comincia a slittare.
Si definisce coefficiente di aderenza il rapporto:
fa=A/Pa
Perché si abbia aderenza deve quindi essere soddisfatta la condizione:
F ≤ A=fa·Pa
Il limite di aderenza A=fa·Pa rappresenta, quindi, il massimo valore della forza di
trazione F che può essere trasmesso da una ruota alla pavimentazione affinché
il moto si svolga in condizioni di puro rotolamento.
La condizione di aderenza deve essere verificata anche in frenatura ovvero la
ruota rotola senza pattinare.
3
Trazione: l’equazione generale del moto
I motivi per i quali la relazione F≤fa·Pa potrebbe non essere soddisfatta sono
molteplici, coinvolgono le tre grandezze in gioco (F, fa e Pa) e non sono sempre
di facile individuazione quantitativa.
Un parametro che nella letteratura sembra che abbia una certa influenza sul
coefficiente di aderenza fa è la velocità del mezzo di trazione, nel senso che
questo viene considerato decrescente con l'aumentare della velocità. Esistono
anche espressioni analitiche, di tipo empirico che esprimono tale variabilità.
In realtà, il coefficiente di aderenza dovrebbe ritenersi invariabile o quasi con la
velocità, mentre ciò che varia con la velocità è il peso aderente di un asse, che
non corrisponde sempre al peso reale gravante sull'asse, quando esso e fermo.
4
Caso ferroviario – Coefficiente di aderenza
Valori massimi del coefficiente di aderenza nel campo ferroviario
• Coppia motrice uniforme, binario asciutto, getto di sabbia 1/2,5 =
0,40.
• Coppia motrice uniforme, binario asciutto o bagnato e pulito 1/3 =
0,33.
• Coppia motrice quasi costante e binario come sopra 1/4 = 0,25.
• Coppia motrice di macchine a vapore e binario come sopra 1/4,5 =
0,22.
• Binario bagnato e trazione a vapore 1/7 = 0,14.
• Binario con brina e trazione a vapore 1/8 =0,12.
• Binario umido sporco e trazione a vapore 1/9 = 0,11.
• Binario ingrassato e trazione a vapore 1/10 = 0,10.
• Binario ingombro di foglie secche e trazione a vapore 1/125= 0,08.
I valori da 5 a 9 aumentano del 15-20% per trazione elettrica.
5
Caso ferroviario – Coefficiente di aderenza
Valori medi del coefficiente di aderenza nell’esercizio ferroviario
• Trazione elettrica con assi accoppiati: 0,25.
• Trazione elettrica con assi liberi; trazione Diesel con assi accoppiati:
0,20.
• Trazione Diesel con assi liberi; trazione a vapore con assi accoppiati:
0,167.
I valori suddetti valgono per rotaie asciutte, lavate o sabbiate, per rotaie
umide per nebbia o pioggia fine si ha una diminuzione del 30%, per rotaie
sporche di grasso o fanghiglia del 50%.
6
Trazione: l’equazione generale del moto
L’equazione generale del moto di un veicolo isolato si scrive:
F-R=Ms∙a=M∙dv/dt
Dove Ms rappresenta la massa statica P/g.
Per tenere anche conto delle masse rotanti, si maggiora il valore della massa
M introducendo il concetto di massa equivalente: Me= (1+β)M>M. Il
coefficiente β (0,1÷0,2) tiene conto di tutte le masse rotanti: ruote, pistoni,
alberi, del cambio e volano oppure rotori. Quindi:
F-R=Me∙dv/dt
•
•
•
•
F = somma di tutte le forze attive (motrici o frenanti) applicate al veicolo.
R = somma di tutte le resistenze applicate al veicolo.
Me = massa equivalente del veicolo.
dv/dt = accelerazione (con v velocità nella direzione del moto).
7
Trazione: il fenomeno dell’aderenza
Nello studio del moto dei veicoli devono sostanzialmente essere considerate
le seguenti forze:
• le forze attive F aventi la stessa direzione del vettore velocità v con
cui il mezzo si sposta, mentre il verso é lo stesso o l’opposto a
seconda che si tratti di forze di trazione o di frenatura;
• le forze passive o resistenze R aventi la stessa direzione della
velocità e verso opposto;
• le forze d’ inerzia Mea.
Le forze attive possono a loro volta avere il verso del vettore v se sono
motrici (forze di trazione), oppure verso opposto se sono resistenti (forze
frenanti).
8
Trazione: le resistenze al moto
La resistenza R all’avanzamento può essere considerata come somma di più
addendi:
R = Rpr + Ra [kg]
Le resistenze in piano e rettilineo, o rettifilo, Rpr dipendono esclusivamente
dalle caratteristiche costruttive del veicolo, mentre quelle addizionali, o
accidentali, Ra dipendono solo dalle caratteristiche costruttive della strada
ordinaria o ferrata.
Resistenze in piano
e rettilineo
RPRr
Resistenze al
rotolamento
RPR
RPRa
Resistenze dovute
all’aria
COPPIA
- Pressione frontale;
PERNO-CUSCINETTO:
- Azione laterale;
Attrito nei fuselli delle sale montate. - Depressione nella
COPPIA
parte terminale.
RUOTA-ROTAIA:
- Deformazione ruota-rotaia;
- Deformazione piano di appoggio;
- Serpeggiamento;
- Urti.
RA
Resistenze addizionali
RAc
Resistenze dovute
alle curve
- Solidarietà delle ruote
con l’asse;
- Parallelismo delle sale
di un carrello;
- urti tra i bordini.
RAp
Resistenze dovute
alla pendenza
R
G
9
Trazione: le resistenze al moto
La resistenza R indica il valore assoluto delle resistenze. La resistenza r
indica il valore unitario delle resistenze.
Resistenze in piano e rettilineo o rettifilo
rPR = b+c·v2 [kg/tonn]
• b=18÷20 [kg/tonn] su strada ordinaria
• b=2,5 [kg/tonn]
su strada ferrata
• c=0,001÷0,04
• v [m/s].
Resistenze addizionali o accidentali
rA = i + ρ [kg/tonn]
• i = resistenza dovuta alle pendenze [‰]
• ρ = C/R resistenza dovuta alle curve [kg/tonn]
Resistenza complessiva
R [kg] = (b+c·v2 + i + ρ) Ms
10
Caratteristica ideale per la trazione
La forza (o sforzo) di trazione F è la forza che applicata alle ruote del veicolo, è
in grado di farlo muovere e mantenerlo in movimento alle diverse velocità nelle
diverse condizioni di marcia.
Poiché la resistenza R si oppone al moto la forza di trazione per mantenere il
veicolo alla velocità richiesta deve essere pari alla resistenza.
F =R
(a regime)
La forza di trazione che deve inoltre consentire il raggiungimento della velocità
massima partendo da fermo pertanto essa deve essere definita in tutto il
campo di velocità da 0 a Vmax e in questo campo deve avere un valore sempre
superiore alla resistenza al moto per fornire al veicolo la forza necessaria a
vincere anche la resistenza dovuta all’inerzia (forza d’inerzia o resistenza
d’inezia)
F = Me∙a (all’avviamento)
11
Equazione generale del moto
Si definisce “caratteristica meccanica” di un mezzo di trazione quella curva
che fornisce la variazione dello sforzo di trazione al cerchione in funzione della
velocità di marcia. Affinché il mezzo di trazione possa svolgere le proprie
funzioni in modo adeguato, è opportuno che tale caratteristica abbia un
andamento particolare.
Caratteristica meccanica
“diagramma che lega due
grandezze meccaniche”
F,v
C,ω
Per un veicolo intero
o motore lineare
Per un singolo
motore
12
Trazione: i motori di trazione
Ogni motore di trazione ha una sua caratteristica meccanica: è un diagramma
che lega due grandezze meccaniche (coppia C - velocità angolare ω, o potenza P
- velocità angolare ω).
Le caratteristiche meccaniche dei motori di trazione si avvicinano a tre
caratteristiche teoriche tipo a P costante, a C costante o a ω costante:
Coppia costante
Potenza costante
P,C
Velocità costante
P,C
P,C
C
P
C
P
C
P
ω
Motore a combustione interna
ω
ω
Motore elettrico
13
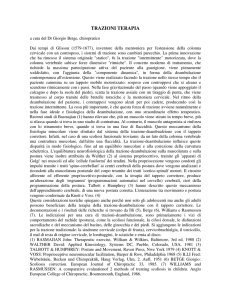
Caratteristiche meccaniche dei motori di trazione
kN
100
I
90
I
II
III
IV
V
VI
III
IV
II
80
motore ideale
a vapore
elettrico c.c.
elettrico c.a. monofase
elettrico c.a. trifase
a combustione interna
70
60
50
40
Raffronto fra le curve
caratteristiche meccaniche
dei motori di trazione
principalmente usati.
V
VI
30
20
10
10
20
30
40
50
60
70
80
90
100
km/h
14
Caratteristica meccanica
Nella curva 1 lo sforzo sviluppato diminuisce gradualmente con la velocità e nella curva
2 esso aumenta gradualmente con la velocità; in ambedue i casi gli andamenti sono
piuttosto morbidi, nel senso che ad una piccola variazione di una variabile corrisponde
una altrettanto limitata variazione dell'altra. Nella curva 3, invece, a piccole variazioni
della velocità, corrispondono consistenti variazioni nei valori dello sforzo di trazione: la
caratteristica è detta del tipo rigido.
Caratteristica
meccanica
F
FB
3
B
2
A
FA
C
FC
1
vB
vA
vC
v
15
Caratteristica meccanica
All'avanzamento, con v=0, lo sforzo non può essere comunque elevato e deve essere
soddisfatta la condizione di aderenza; poiché è opportuno avere comunque un margine
di sicurezza, il limite superiore degli sforzi è fissato in corrispondenza di una retta del
tipo AB.
Nel senso della ascisse, la caratteristica meccanica è limitata dalla intersezione con la
curva corrispondente alle resistenze al moto R propria della motrice.
F,R
A
E1
faP
B
E2
F
R
E3
F1
H1
F2
H2
F3
H3
C
v
16
Caratteristica meccanica
17
Caratteristica meccanica
Se le resistenze al moto cambiano, la curva R si sposta e, dopo un periodo di regime
variabile, si perviene, ad un altro punto stabile di regime del tipo C’. II citato andamento
della caratteristica meccanica può essere realizzato in modo completo e spontaneo da
un unico motore elettrico, senza agire in pratica in modo sostanziale sulla sua
regolazione (come avviene, ad esempio, nel motore in corrente continua serie tuttora
impiegato nelle vecchie locomotive italiane), oppure agendo sul sistema di regolazione in
modo che la caratteristica sia il risultato di una serie di diverse caratteristiche spontanee
del motore.
F,R
R’
F
R’
C’
C
vc’
vc
v
18
Caratteristica ideale per la trazione
Ciò si può ottenere ad esempio con una caratteristica meccanica F(v) di tipo
iperbolico (P=F∙v=costante) che fornisca alla velocità massima vmax una forza
pari alla resistenza al moto F=Rmax.
A velocità inferiori a quella massima
F
vmax la forza F è senz’altro superiore
alla resistenza R per cui la differenza
rispetto a quest’ultima è disponibile
F(v)
per variare la velocità con una
determinata accelerazione a.
forza
acceleratrice
M·a
0
R(v)
vmax
v
19
Caratteristica ideale per la trazione
La caratteristica iperbolica tende a fornire valori molto elevati della forza a
basse velocità: se fosse perfettamente iperbolica a velocità nulla darebbe un
valore infinito. Tali valori non possono essere utilizzati se non sono compatibili
con l’aderenza disponibile al contatto ruota rotaia.
Inoltre, la forza di trazione non deve
superare neanche una certa velocità
F
LIMITE DI ADERENZA
LIMITE DI VELOCITÀ
Quindi la forza di trazione non deve
superare
quella
di
aderenza,
altrimenti la ruota slitta e non vi è
avanzamento.
altrimenti ci sarebbe la rottura degli
organi in moto del mezzo di trazione.
v
20
Caratteristica ideale per la trazione
Poiché il tempo necessario per raggiungere la velocità vmax dipende
dall’accelerazione per ridurre al minimo tale tempo l’accelerazione dovrebbe
essere la più elevata possibile. Ciò si può ottenere solo se si adottano
caratteristiche che forniscano a pari velocità valori più elevati della forza di
trazione.
F, R
Pmax
P1
P0
Fmax
Pmax>P1>P0
POTENZA COSTANTE
SFORZO COSTANTE
sforzo acceleratore
M·a
R
0
vmax
RESISTENZE
AL MOTO
v
21
Caratteristica ideale per la trazione
Se si volesse ridurre al minimo il tempo necessario a raggiungere la velocità
massima vmax la forza di trazione F dovrebbe mantenersi costante e pari a quella
massima trasmissibile Fmax con l’aderenza nel campo di velocità che va da 0 a
vmax e poi ridursi fino ad uguagliare la resistenza Rmax. La potenza utilizzata
aumenterebbe proporzionalmente con la velocità da zero alla potenza
massima, in corrispondenza della velocità massima e poi si ridurrebbe fino a
quella necessaria per garantire la velocità massima.
F, R, P
F, R, P
F, R, P
Pmax
Fmax
Fmax
Fmax
P1
P0
R
0
vmax
R
v
0
vmax
R
v
0
vmax
v
22
Caratteristica ideale per la trazione
Maggiore è la potenza di dimensionamento, maggiore può essere la zona a
sforzo costante. Ovvero il valore di v1 si sposta verso destra.
Le massime prestazioni si ottengono quando lo sforzo di trazione è sempre
costante fino alla velocità massima. Questo però, richiederebbe una potenza di
dimensionamento elevatissima e sfruttabile solo per la fase di avviamento.
F, P, R
Potenza crescente
F
POTENZA COSTANTE
Servizi metropolitani
Limite di aderenza
Fmax
SFORZO COSTANTE
Servizi ferroviari
Pmax = Fmax · vmax
RESISTENZE
AL MOTO
vmax
v
v
23
Caratteristica ideale per la trazione
Una volta fissata la potenza massima del mezzo di trazione, si può definire il
dominio (F, v) delimitato da due confini:
• Limite di aderenza: lo sforzo di trazione non deve superare quello di
aderenza altrimenti la ruota (motrice) slitta. Cosa analoga succede in
frenatura (pattinamento).
• Limite di velocità: lo sforzo di trazione non deve superare una certa velocità
altrimenti ci sarebbe la rottura degli organi in moto del mezzo di trazione.
24
Caratteristica meccanica
Ritorniamo alla definizione di caratteristica meccanica. La potenza meccanica ai
cerchioni è data da:
Pc=F·v
F,Pc
Pc=Potenza al cerchione
A4
F1
A3
A1
Pc1
F(v)
Pc(v)
va v1
A2
vmax
v
Caratteristica meccanica di un mezzo di trazione
25
Caratteristica meccanica
Per 0<v<va il valor medio Fa della forza di trazione è costante; il tratto A4-A3 viene
ottenuto con un’opportuna regolazione dell’azionamento elettrico e deve essere
compatibile:
•
Con il limite di aderenza, cioè Fa≤fa·Pa;
•
Con il valore massimo di coppia che i motori di trazione possono sviluppare.
F,Pc
F1
A4
A3
A1
Pc1
F(v)
Pc(v)
va v1
A2
vM
v
26
Caratteristica meccanica
Nel tratto A4-A3-A1 i motori lavorano in sovraccarico, cioè in servizio di durata limitata; la potenza,
uguale al valore nominale nel punto A1, decresce all’aumentare della velocità da v1 a vM. I mezzi di
trazione con azionamento elettronico e motori trifasi presentano una caratteristica meccanica
differente: i punti A3 e A1 vengono in pratica a coincidere e nell’intera gamma di velocità v1-vM si
sviluppa la potenza: Pc1=cost.
Caratteristica meccanica di un mezzo di trazione
F , Pc
F , Pc
Fase iniziale
Fase iniziale
F4
F3
A4
F4 A4
A3
F1
F1
A1 A3
A1
PM
Pc1
A2
Pc1
A2
0
va v1
Azionamenti tradizionali
vM
v
0
v1
vM v
Azionamenti elettronici trifasi
27
Passaggio alla caratteristica meccanica dei motori
Nel passaggio tra la caratteristica meccanica del mezzo di trazione a quella del
motore bisogna tener conto del rapporto di riduzione e dei vari rendimenti.
vmax
2 n
60
1
rmax
Cmax
t
r
[rad/s]; D[m]; n M [giri/min]; v M [m/s]
Fmax
Trasmissione
Motore
t
C,n
Ruote motrici
F,v
28
Passaggio alla caratteristica meccanica dei motori
In questo caso si può passare dalla caratteristica meccanica mezzo di trazione
(F, v) a quello del motore (C, ω).
Caratteristica meccanica
C
F
PM
CM
ωM
PM
FM
ω
vM
v
Caratteristica meccanica
del motore
Caratteristica meccanica
del mezzo di trazione
C,ω
F,v
29
Passaggio alla caratteristica meccanica dei motori
sospensione a naso
telaio del carrello
albero motore
motore di trazione
Motore di
trazione
assile
cuscinetto
Dr
D
?M
Motore di
trazione
cerchione
C, n
TRASMISSIONE
?r
Dp
ruota dentata
MOTORE
Ruota
motrice
RUOTA
F, v
30
Trazione elettrica
Quando il motore di trazione è quello elettrico si parla di trazione elettrica.
Sistema di
alimentazione
Motore (più
apparato di
regolazione:
azionamento)
Alimentazione
Regolazione
Motore
elettrico
Propulsore
Sistema di Propulsione (di Trazione)
31
Trazione elettrica: l’azionamento elettrico
La dizione “trazione elettrica” si riferisce perciò a quei veicoli il cui moto
avviene per l’azione di uno o più motori elettrici o più correttamente per mezzo
di azionamenti elettrici di trazione che consentono la regolazione dei motori.
L'azionamento elettrico è un sistema che converte l'energia elettrica che riceve
in ingresso, in energia meccanica in uscita.
Energia
Elettrica
Convertitore
Motore
Energia
Meccanica
Schema elementare di azionamento elettrico
32
Trazione elettrica: l’azionamento elettrico
Per quanto riguarda la funzione del motore elettrico si parla di azionamento
elettrico in:
• corrente continua;
• corrente alternata.
Invece sulla base delle prestazioni, gli azionamenti elettrici sono in grado di
fornire una:
• regolazione discreta;
• regolazione fine.
Senza l’elettronica di potenza la regolazione è sicuramente discreta: è possibile
avere una numero finito di caratteristiche meccaniche.
Con l’elettronica di potenza si ottiene un azionamento con regolazione fine:
numero infinito di caratteristiche meccaniche (dominio).
33
Trazione elettrica: il sistema di trazione
Senza captazione: veicolo elettrico puro
Equipaggiamento
di trazione
(apparecchiature di
regolazione)
veicolo
Sistema di
alimentazione
(batterie)
Motore
elettrico
Senza captazione: veicolo diesel elettrico
Equipaggiamento
di trazione
(apparecchiature di
regolazione)
veicolo
Motore
diesel
Generatore
elettrico
Motore
elettrico
(alternatore)
Sistema di alimentazione
34
Trazione elettrica: il sistema di trazione
Senza captazione: veicolo ibrido serie
Equipaggiamento
di trazione
(apparecchiature di
regolazione)
batterie
Generatore
elettrico
(alternatore)
veicolo
Motore
diesel
Motore
elettrico
Sistema di alimentazione
Senza captazione: veicolo ibrido parallelo
Equipaggiamento
di trazione
(apparecchiature di
regolazione)
Batterie
e/o
Fuel Cell
Sistemi di
alimentazione
Generatore
elettrico
(alternatore)
veicolo
Motore
diesel
Motore
elettrico
35
Trazione elettrica: il sistema di trazione
Con captazione
Sistema di
alimentazione
Linea aerea
Pantografo
Equipaggiamento
di trazione
(apparecchiature di
regolazione)
veicolo
Motore
elettrico
36
Trazione elettrica: trasformazione energetica
• leggi sui circuiti elettrici e magnetici = Elettromagnetismo.
• leggi meccaniche = Meccanica.
• leggi elettro-meccaniche = Trasformazioni di energia elettrica in energia
magnetica.
• leggi meccano elettriche = Trasformazioni di energia meccanica in
energia elettrica.
Schema semplificativo delle leggi che governano i fenomeni elettromagnetici, meccanici, elettromeccanici e meccano-elettrici
Leggi
elettromeccaniche
Legge sui circuiti
elettrici e magnetici
F B l i
Leggi
meccaniche
Leggi
meccanoelettriche
E V
P E i
f.m.m.
f.e.m E R i
F FR
P F v
E B l v
37
Trazione elettrica: trasformazione energetica
1. Legge fondamentale elettrica: E=∑ΔV dove E è la f.e.m o tensione
applicata o al circuito e le ΔV rappresentano le cadute di tensione.
2. Legge fondamentale meccanica: F=∑FR
(somma di tutte le forze
resistenti).
3. Legge fondamentale elettromeccanica: F=B∙l∙i. L’ipotesi fondamentale è
che la macchina contenga circuiti magnetici. Ci interessano le forze che
sono esercitate su di un conduttore percorso da corrente e immerso in
un campo magnetico. È la relazione che trasforma la potenza E∙I elettrica
nella corrispondente F∙v del campo meccanico.
4. Legge fondamentale meccano-elettrica: E=B∙l∙v. Forza (elettromotrice
f.e.m.) esercitata sulle cariche di un conduttore in moto in un campo
magnetico.
38
Trasformazione energetica: generatore elementare
Asse che trasla su due rotaie conduttrici, immerso in un campo di induzione
B infinito ed uniforme. Se l’asse si muove con velocità v, ai suoi estremi
nasce una f.e.m. E=Blv e, se chiudo il circuito su di una resistenza R, si avrà
una corrente i=E/R. Tale corrente passando nel conduttore farà nascere una
forza meccanica F=Bli, quindi se si vuole che il moto del conduttore continui
è necessario una potenza meccanica pari a F∙v; quindi si ha:
F∙v=Bli∙v ovvero F∙v=E∙i
In questo modo si è riuscita ad
i
E
F
ottenere la trasformazione di potenza
B
v
R
meccanica in potenza elettrica.
39
Trasformazione energetica: motore elementare
Lo schema è analogo. In questo caso è pero presente una batteria che fa
circolare una corrente i nel circuito. Sul conduttore si esercita quindi una
forza F=Bli e il conduttore si muove; questo movimento da luogo ad una
f.e.m. E=Blv che ha direzione opposta alla tensione applicata.
La potenza elettrica che si deve fornire, perché il conduttore continui il suo
moto con velocità v, è pari a Ei. Raccogliendo le formule si ha: Vi≈Ei=Blvi=Fv.
In questo modo si è ottenuta la trasformazione di energia elettrica in energia
meccanica. Nei due casi non si è tenuto conto delle perdite (Vi≈Ei).
Nella schematizzazione elementare
0
i
E
V
B
di una macchina elettrica, avviene
v
F
una
trasformazione
di
energia
meccanica in energia elettrica e
viceversa.
40
Trazione elettrica: i motori elettrici
Vantaggi della trazione elettrica
Prestazione
•
•
•
•
Flessibilità
Elevata densità di potenza.
Capacità di sovraccarico.
Reversibilità che permette
l’uso della frenatura elettrica.
Accelerazioni/decelerazioni
elevate.
•
•
•
Adattabilità
alle
diverse
condizioni di marcia senza
penalizzare il rendimento.
Possibilità di sfruttare diverse
fonti di energia.
Varietà nella scelta dei motori
(c.c., asincrono, sincrono).
Economicità e compatibilità
ambientale
•
Emissioni fortemente ridotte
(teoricamente nulle).
•
Bassa rumorosità del motore
elettrico.
•
Manutenzione limitata sulla
parte elettrica ed elettronica.
Applicazioni “ideali”
•
•
•
•
Trasporti urbani di massa (metro, bus elettrici)
Trasporti AV di massa su medie distanza
Linee in galleria (treni navetta)
Trasporto urbano privato (in futuro)
41
Trazione elettrica: i motori elettrici
Usati fino ad oggi
per la trazione
Motori elettrici
A corrente
alternata
Asincrono
Sincrono
A corrente
continua
Monofase a
colletore
A eccitazione
serie
A eccitazione in
drivazione
Caratteristica meccanica
intrinsecamente idonea per la trazione
Motori elettrici
Con captazione
Linea di contatto
Veicoli senza sistema di
alimentazione a bordo
Modi di
alimentazione
Senza captazione
Veicoli diesel elettrici
Veicoli elettrici “puri”
Veicoli ibridi
Veicoli con sistema di alimentazione a bordo
42
Trazione elettrica: i motori elettrici
F,v
Per un veicolo intero
C,ω
Per un singolo motore
I, ω
Corrente in funzione
della velocità
C,I
Coppia in funzione
della corrente
Caratteristica meccanica
“diagramma che lega due grandezze
meccaniche”
Caratteristiche elettromeccaniche
“diagramma che lega una grandezza
elettrica con una meccanica”
43
Motore a collettore ad eccitazione serie in c.c.
Vantaggi
• Caratteristica meccanica idonea all’applicazione di trazione (ampia zona in
cui C·n=cost).
• Tecnologia consolidata e quindi di grande affidabilità.
• Buon rendimento per un ampio intervallo di carico.
• Presenta un’ottima meccanica (resistenza a vibrazioni ed urti).
• Regolazione della velocità relativamente semplice.
Svantaggi
• Ingombri e pesi considerevoli per la presenza del collettore.
• Manutenzione frequente soprattutto sul sistema spazzole-collettore.
• Rapido incremento della velocità per bassi carichi (fuga del motore).
• Tensioni applicabili limitate per assicurare la tenuta dell’isolamento tra le
lamelle del collettore.
44
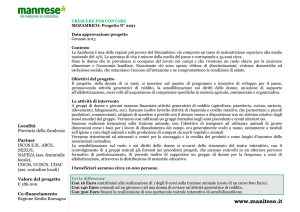
Motore a collettore ad eccitazione serie in c.c.
Sezione longitudinale del motore serie
1. Spazzole e portaspazzole
2. Lamelle
3. Testate
4. Nuclei poli eccitazione
5. Avvolgimenti di eccitazione
6. Ventilatore
7. Canale di ventilazione assiale
8. Pignone
9. Corona dentata
10. Sala montata
45
Motore a collettore ad eccitazione serie in c.c.
Statore o eccitazione
Indotto o armatura
Spazzole e collettore
Indotto o armatura:
ri = ra + rpa + rac
E
Armatura
ra
Poli ausiliari
rpa
Avv. compensatori
rac
Eccitazione:
re
Indotto+eccitazione:
+
i
M
p.a.
a.c.
rpa
rac
ra
U
re
p.p.
r = ri + re
46
Motore a collettore ad eccitazione serie in c.c.
Schema del motore serie
Indotto o armatura:
ri = ra + rpa + rac
E
Armatura
ra
Poli ausiliari
rpa
Avv. compensatori
rac
Eccitazione:
re
+
i
M
p.a.
a.c.
rpa
rac
ra
U
re
Indotto+eccitazione:
p.p.
r = ri + re
E
U E re I
equilibrio del circuito elettrico
E k n
trasformazione meccanoelettrica
C k ' I
trasformazione elettromeccanica
+
I
M
re
reI
U
47
Motore a collettore ad eccitazione serie in c.c.
CARATTERISTICA
ELETTROMECCANICA
C
CARATTERISTICA
MECCANICA
C(n)
C(I)
C(n)=costante
I
n
n(I)
I
CARATTERISTICA
ELETTROMECCANICA
48
Motore a collettore in c.a.
Molto schematicamente possiamo rappresentare il motore come in figura, anche se
in effetti, nei motori a c.a. i poli sono più numerosi.
Sempre in figura si può notare, dalla disposizione spaziale degli avvolgimenti
statorico e rotorico, il flusso statorico e quello rotorico (reazione di armatura).
R
S
I
s
R
49
Motore a collettore in c.a.: circuito equivalente
Il motore monofase a collettore ha caratteristiche costruttive in parte simili a quello a
corrente continua; lo statore è però laminato, essendo il flusso alternato.
L’avvolgimento d’indotto è di tipo parallelo.
Avvolgimento Avvolgimento
Avvolgimento
d'indotto compensazione dei poli ausiliari
E
I
M
a.c.
p.a.
U
p.p.
Avvolgimento
d’eccitazione
50
Motore a collettore in c.a.: caratteristiche
,I
M
I
t
,I
t
M
I
t
t
I I M sen t
M sen t
M K I K
M I M
2
cos cos 2t
51
Motore asincrono trifase (in c.a.)
Vantaggi rispetto motore c.c.
Ingombro e massa ridotti a parità di potenza.
Assenza di collettore e spazzole (problemi di
manutenzione, limiti di corrente e velocità).
Passaggio automatico da trazione a
frenatura senza modifiche circuitali.
Problematiche prima di utilizzo inverter
Rigidità di funzionamento (poche velocità
fisse di marcia in condizioni di stabilità).
Complicazioni impiantistiche (linea bifilare,
frequenza di alimentazione ridotta).
Impiego di inverter controllati in tensione e frequenza
Elevata elasticità di funzionamento grazie all’ampio intervallo di regolazione della
frequenza.
Locomotori ad impiego universale (passeggeri, merci).
Standardizzazione dei mezzi e riduzione dei costi.
Inversione di marcia ottenuta modificando la sequenza di alimentazione delle fasi senza
ricorrere ad apparecchiature elettromeccaniche.
Avviamento ottenuto con bassi scorrimenti grazie alla regolazione della frequenza (elevate
coppie di spunto, basse perdite rotoriche).
Riduzione della massa dei motori e quindi del peso dei carrelli con miglioramento della
qualità di marcia (Mcarr/Mtot ≈ 40% ⇔ Mcarr/Mtot ≈ 55% con motori c.c.).
52
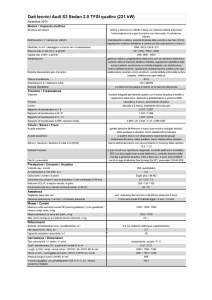
Confronto dimensionale motori (stessa potenza)
Motore DC a collettore
Motore asincrono trifase
53
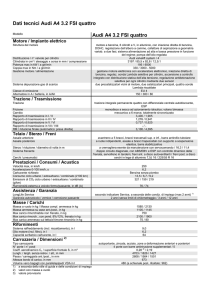
Confronto locomotori DC e AC
Traction drive of:
E103:
E152:
rated power:
1230kW at 1520 min-1
1633kW at 2280 min-1
maximum torque:
8530Nm for 5 min
6840Nm constantly
maximum speed:
1600min-1
4000min-1
mass (without gear):
3550kg
2800kg
moment of inertia:
120kg m2
18,4kg m2
Dimensions:
910
1200
855
870
54
Caratteristica meccanica motore asincrono
Tratto instabile
della caratteristica
C
C K f
s R2
R22 s 2 X 02
CM
Caratteristica meccanica
motore asincrono
K f 2
K 2
CM
2
2 X0
4 L2
s
C
Caratteristica ideale per
la trazione
R2
X0
0
R2
f 2 s f 1
2 L2
n
n0
n
C CM
s
1
f2
f
s fn 0
f2
55
Regolazione di velocità del motore
Come accennato precedentemente, l'azionamento elettrico, in corrente continua o in
corrente alternata, può fornire una regolazione del motore discreta oppure fine. Si
parlerà, nel primo caso di azionamenti tradizionali, nel secondo, di azionamenti
elettronici.
Nell’azionamento elettronico la conversione avviene in genere mediante i seguenti
componenti:
• motori elettrici;
• convertitori elettronici di potenza;
• sensori;
• trasduttori;
• unità di controllo.
Regolazione di un motore significa:
• a coppia costante sviluppare diverse velocità;
• a velocità costanti sviluppare diverse coppie.
56
Azionamento tradizionale in c.c.: regolazione di velocità
E
E k n n
k
U E rI E U rI
n
U rI
k
E
I
M
r
rI
U
Metodi di regolazione della velocità:
1. variare la tensione attraverso una resistenza aggiuntiva (regolazione
reostatica);
2. variare il flusso regolando la f.m.m. di eccitazione (regolazione di
campo);
3. variare la tensione di alimentazione U (regolazione di tensione:
transizione serie/parallelo, chopper);
57 57
Azionamento tradizionale in c.c.: regolazione di velocità
1,5 - 3 kV c.c.
Linea di contatto
F, R
Transizione
serie-parallelo
FM
Apparecchiature
di regolazione
Regolazione
reostatica
Reostato
F
Motore di
trazione
M
=
Indebolimento di
campo
Motore in c.c.
eccitazione serie
R
Binario
vr
1,5 - 3 kV c.c.
Linea di contatto
Linea di contatto
v
1,5 - 3 kV c.c.
Esempio di transizione
serie-parallelo
1
3
5
IL
M
P
M
=
Binario
ecc.
Esempio di
Indebolimento
di campo
U
2 S1 4
6
S2
G
M
Binario
58
Azionamento tradizionale in c.c.: regolazione reostatica
La resistenza R può essere variata cortocircuitando sequenzialmente le sezioni
reostatiche r1, ... , rn tramite dei convertitori.
1. La corrente di avviamento non può essere mantenuta costante (numero
eccessivo di posizioni reostatiche).
2. La corrente viene fatta variare tra valore min IB ed un valore max IA.
C
U (R r) I
n
k
(IA)
(IB)
R
r1
r2
rx-1
+ I
R
r
M
I
II
-
<R
R=0
E
U
n
59 59
Azionamento tradizionale in c.c.: regolazione di campo
La variazione di flusso può essere ottenuta o variando con uno shunt, posto in
parallelo al circuito di eccitazione, la corrente di campo, o diminuendo il
numero di spire costituenti il circuito di eccitazione
Poiché in entrambi i casi si ha una diminuzione delle amperspire di eccitazione
e quindi del flusso induttore, l'operazione prende il nome di indebolimento di
campo.
n
U (R r) I
k
Re
C
Re
e1>e2>e3
I ecc
Rsh
e2
3 2 1
e3
U
M
I sh
M
e1
Ia
Inserzione di derivatori
ohmico – induttivi
U
Variazione del numero
delle spire attive
n
60 60
Aziona. tradizionale in c.c.: transizione serie - parallelo
Con questo sistema è necessario disporre di almeno due motori che si possano
connettere in serie o in parallelo.
Disposti in serie sotto una certa tensione U, ai motori è applicata una tensione
pari a U/2, mentre la corrente è I per entrambi. Quando vengono disposti in
parallelo la tensione applicata sui motori è U, cioè si realizza un'altra
caratteristica.
Ps = V x I
Pp = V x 2 I = 2 Ps
F
V/2
I
V
2I
M
M
I
I
I
PARALLELO
M
M
V/2
V
SERIE
PARALLELO
SERIE
v
61
Azionamento tradizionale in c.c.: regolazione di velocità
Vediamo una sequenza di avviamento:
1. Avviamento con motori in serie ed esecuzione della regolazione
reostatica e successivamente anche ad un indebolimento di campo.
2. Completamento regolazione reostatica e di campo e passaggio alla
configurazione finale del circuito di trazione avente i motori in
parallelo e reinserimento del reostato.
3. Completamento regolazione reostatica e di campo fino al punto di
lavoro finale.
62
Azionamento tradizionale in c.c.: regolazione di velocità
F, R
FM
e2
e5
e3
e6
e1
e4
F
R
vr
v
Caratteristica meccanica regolata con esclusione reostatica,
indebolimento di campo e transizione serie - parallelo
63 63
Azionamento tradizionale in c.a.
Linea di contatto
15 kV c.a. 16 2/3 Hz
F
e3
e2
e1
e0
F1
Trasformatore
con rapporto di
trasformazione
variabile
Binario
M
Motore in
monofase a
collettore
0
v1
v
vM
64
Azionamento tradizionale
Gli azionamenti tradizionali presentano due grossi svantaggi:
1. Consumo di energia e quindi il rendimento globale di trazione basso.
2. Dimensionamento del reostato di avviamento, che dovendo dissipare una
quantità superiore di energia risulta più pesante, più ingombrante e più
costoso; qualità che si pagano anche nel dimensionamento della
locomotive stessa (maggior peso ed ingombro dell'apparecchiatura).
65 65
Azionamento tradizionale
Questi problemi hanno portato negli anni passati ad un dimensionamento del
motore di trazione, ne che permettesse di eliminare il reostato di avviamento
nel tempo minimo compatibile con le prestazioni, richieste al veicolo; ciò
richiede in particolare che la velocità di dimensionamento del motore a pieno
campo corrisponda ad una velocità del veicolo relativamente bassa rispetto alla
velocità massima di servizio in mode appunto che la caratteristica a piena
tensione sia raggiunta in un tempo minimo.
Ciò implica motori a basso numero di giri di dimensionamento e quindi di
ingombro, peso e costo elevati.
66 66
Azionamento elettronico in c.c.: il chopper
Il chopper è il dispositivo per la conversione corrente continua in corrente
continua (c.c./c.c.). Esso è costituito da componenti elettronici (schematizzato
in figura come un interruttore ideale T).
Con il chopper è possibile variare con continuità il valore della tensione in uscita
U2 partendo in ingresso da un sistema di alimentazione in c.c..con un valore di
U1 fisso.
I1
I2
=
U1
I1
U2
U1
T
D
I2
I1 D
U2
U1
I2
T
U2
=
Lato
linea
Lato
motore
Abbassatore
(motore) U1>U2
Elevatore
(generatore) U1<U2
67 67
Azionamento elettronico in c.c.: il chopper
Questo sistema di regolazione è impiegato nei
mezzi di trazione equipaggiati con motore in
c.c. e permette di regolare, con continuità e
senza dissipazioni di energia, la velocità,
dall’avviamento fino a regime (assenza di
transizione serie/parallelo o inserzione di
resistenze).
Per ottenere la variazione di U2 nell'intervallo
0÷U1, è possibile agire in due maniere
distinte: variare il periodo T mantenendo
costante Tc (chopper a frequenza variabile)
oppure variare Tc con T costante (chopper a
frequenza fissa).
u2
U1
U2
Tc
T
t
Tb
2T
3T
u2
U1
U2
Tc
t
Tb
T
2T
3T
u2
U1
U2
Tc
Tb
T
Tc Tb Tc Tb
T
t
T
68 68
Azionamento elettronico in c.c.: il chopper
Rispetto agli equipaggiamenti tradizionali è possibile avere una regolazione continua della
forza e della velocità.
Il comando della marcia è molto più flessibile; è possibile infatti variare con continuità la forza
di trazione di avviamento ed effettuare la marcia a velocità prefissata, regolata
automaticamente.
La regolazione di campo può essere usata per estendere il campo di utilizzazione ad alta
velocità.
Linea di contatto
1,5 - 3 kV c.c.
F, R
FM
Apparecchiature
di regolazione
Motore di
trazione
Binario
Chopper
M
=
Motore in c.c.
eccitazione serie
Dominio di
regolazione
F
R
a coppia costante
a potenza costante
v
69
Azionamento elettronico in c.a.: l’inverter
La caratteristica meccanica del motore asincrono è di tipo “rigida”, ovvero è lontana da
quella ideale per la trazione (a potenza costante) come per esempio, quella del motore a
collettore ad eccitazione serie.
Da quanto detto appare evidente la necessità di disporre di un dispositivo che regoli in
maniera più fine possibile la tensione (V) e la frequenza (f) del motore asincrono.
Ciò è stato possibile con l’utilizzazione dell’inverter, che ha consentito di ottenere, anche
con i motori trifasi, caratteristiche meccaniche quanto mai prossime a quella ideale per
la trazione.
C
INVERTER
CON
INVERTER
SENZA
INVERTER
=
Ingresso
c.c.
Lato
alimentazione
Uscita c.a.
trifase
3~
Lato
motore
n
70
Azionamento elettronico in c.a.: regolazione U-f
Regolazione tensione-frequenza motore asincrono
C,P,U
U
UM
CM
fn
C
f
<fn
CM
fn
C(n)
P(n)
PM
1/n2
U(n)
UM
>fn
C
V
cos t .
f
0
n1
nM n
0
n1
V
decre.
f
nM
n
71
Azionamento elettronico in c.a.
Linea di contatto
15 kV c.a. 16 2/3 Hz
25 kV c.a. 50 Hz
Trasformatore
riduttore
Apparecchiature di regolazione
Motori di trazione
~
M
~3
~
Raddrizzatore
Chopper
(variazione di V)
Inverter
(variazione di f)
asincroni/
sincroni
Binario
Linea di contatto
1,5 - 3 kV c.c.
Appar.
di regol.
~
Inverter
Binario
Motore di
trazione
M
~3
F, R
asincrono
FM
Dominio di
regolazione
asincrono/
sincrono
F
R
a coppia costante
a potenza costante
v
72
Esempio: locomotore elettrico in c.c.
73
Esempio: locomotore elettrico in c.a.
Ventole di
raffreddamento
Compressone
Raddrizzatore
principale
Interruttore
generale
Inverter
principale
Batterie
Motori di
raffreddamento
Motori
trifasi
Pantografo
Raddrizzatore
ausiliario
Inverter
ausiliario
Trasformatore
principale
Spazzola
74
Esempio: locomotore elettrico politensione
75
Esempio: locomotore diesel-elettrico
76
Esempio: autobus ibrido
77
Esempio: Tram
•
•
•
•
•
•
•
•
•
largo 2,40 metri;
alto 3,30 metri (pantografo escluso);
lungo 32 metri;
composto da 5 unità intercomunicanti;
424kW di potenza totale;
70 km/h di velocità massima;
42 posti a sedere, più 4 attrezzati per disabili in sedia a rotelle;
160 posti in piedi (alla densità di 4 passeggeri/m2);
202 passeggeri di capacità totale.
78
Esempio: Trolleybus
79
Trazione elettrica: il circuito di trazione
Come per tutti gli impianti utilizzatori dell’energia elettrica, anche quello
della trazione utilizza un circuito elettrico chiuso, che nel caso particolare
è chiamato “circuito di trazione” ed è composto da una sorgente di
energia, da una linea di alimentazione da un utilizzatore e da un
conduttore di ritorno.
Per i mezzi senza captazione, il circuito di trazione si riferisce alla parte
del circuito attinente al solo veicolo stesso.
Se consideriamo, invece, i mezzi con captazione, per sistema di trazione si
intende il complesso linea di contatto (sorgente di energia e linea di
alimentazione), elettrotreno (utilizzatore) e rotaie (conduttore di
ritorno). Tipico esempio di questi sistemi è quello ferroviario.
80
Trazione elettrica ferroviaria
Un impianto di elettrificazione o
alimentazione comprende i seguenti sistemi:
• La produzione in centrali di energia
elettrica.
Centrale di
produzione di
energia elettrica
• Il trasporto dell’energia con linee in alta
tensione AT.
• La trasformazione nelle sottostazioni SSE
dove l’energia elettrica è portata a valori
di tensione adatti al sistema di trazione
impiegato.
Trasmissione dell’energia
elettrica: linee AT
SSE
• La linea di contatto TE che porta
l’alimentazione ai veicoli.
• I veicoli che ricevono l’energia elettrica e
la trasformano in energia meccanica.
Trasformazione
dell’energia elettrica
Linea di contatto TE
Binario
81
Linee di alimentazione in AT e MT
L’energia elettrica viene trasmessa su linee di alimentazione in Alta
Tensione AT. Sono considerate linee in AT quelle con valore di tensione
pari a 66, 132, 150 e 220 kV. La maggior parte delle linee in AT hanno la
funzione di trasportare l’energia elettrica dalle centrali di produzione alle
sottostazioni elettrice di trasformazione e smistamento. In queste
sottostazioni l’energia la tensione viene abbassata ad un valore di
tensione che varia da 6 a 20 kV: linee in Media Tensione MT. Le linee in
MT sono linee di distribuzione.
Le linee di AT sono di proprietà della TERNA, mentre le maggior parte
delle linee di MT sono di proprietà dell’ENEL.
Le linee di alimentazione ferroviarie TE sono alimentate o dalla rete di MT
oppure dalla rete di AT.
82
Sistemi di alimentazione per la trazione
I sistemi di alimentazione usati per la trazione elettrica (ferroviaria,
metropolitana, tranviaria e filoviaria) per l’alimentazione delle linee TE
sono:
• 0,75 kV in corrente continua (tranviaria e filoviaria);
• 1,5 kV in corrente continua (ferroviaria, metropolitana);
• 3 kV in corrente continua (ferroviaria, metropolitana);
• 15 kV in corrente alternata a frequenza 16 e 2/3Hz (ferroviaria,
metropolitana);
• 25 kV in corrente alternata a frequenza 50Hz (ferroviaria AV).
83
Sistemi di alimentazione per la trazione
Come per i sistemi di trazione, anche per quelli di alimentazione l’evoluzione è
stata determinata dallo sviluppo dell’elettronica di potenza (convertitori statici).
Oggi la scelta del sistema di alimentazione non è più vincolante per la scelta del
motore di trazione da equipaggiare su di un mezzo di trazione.
La regolazione dei motori elettrici, sia quella tradizionale e sia quella con i
convertitori, viene fatta variando il parametri elettrici tensione V, corrente I e
frequenza f.
Siccome i parametri elettrici del sistema di alimentazione sono fissi, i mezzi di
trazione sono dotati di equipaggiamenti di trazione capaci di variare i
parametri elettrici del motore presente a bordo del mezzo.
84
Sistemi di alimentazione in trazione
Prima dei convertitori statici
SISTEMA DI
ALIMENTAZIONE
SISTEMA DI
TRAZIONE
LINEA DI CONTATTO
UNIPOLARE
MOTORE A COLLETTORE
ECCITAZIONE SERIE
SISTEMA MONOFASE 15kV-16 2/3Hz (GERMANIA)
SISTEMA 3kV c.c. (ITALIA)
SISTEMA 750V-1500V c.c. (GRAN BRETAGNA-FRANCIA)
85
Trazione elettrica ferroviaria
Dopo i convertitori statici
SISTEMA DI
ALIMENTAZIONE
SISTEMA DI
TRAZIONE
LINEA DI CONTATTO
UNIPOLARE
MOTORI SINCRONI E
ASINCRONI TRIFASE CON
INVERTER
SISTEMA MONOFASE AT
25kV-50-60Hz
(Francia, Giappone)
SISTEMI PREESISTENTI
Adeguamento apparati di
alimentazione di bordo
86
Sistema di alimentazione in c.c.
Linea primaria AT
Centrale di
produzione
di energia
elettrica
50 Hz
Gli impianti ferroviari in c.c. sono
alimentati alla tensione di 1.500 V o
220 kV c.a.
3.000 V.
Stazione di
smistamento
9-25 kV c.a.
Linea di distribuzione MT
Le
sottostazioni
conversione
Ente distributore
Impianti ferroviari
SSE – Sottostazione
Elettrica di conversione
3 kV c.c.
ferroviarie
di
sono
allacciate alla rete di MT da 9 ÷ 20
kV e trasformano e convertono
Trasformatore
di gruppo SSE
Raddrizzatore
elettriche
~
l’energia elettrica da c.a. in c.c..
La potenza fornita da ciascun
gruppo di SSE arriva fino a 5,4 MVA.
Linea di contatto TE
binario
87
15kV in c. a. a frequenza 16 e 2/3Hz concentrata
G
~
Gruppi di
produzione
monofasi
autonomi
16 e 2/3 Hz
Centrali di
produzione
di energia
elettrica
50 Hz
Linea primaria AT
220 kV c.a.
16,67 Hz
Trasformatore
riduttore
Trasformatore
elevatore
Stazioni di
conversione
di fase e di
frequenza
60-110 kV c.a.
60-110 kV c.a.
Convertitore di
frequenza
60-110 kV c.a.
16,67 Hz
60-110 kV c.a.
16,67 Hz
Linea primaria
(ferroviaria)
Linea primaria
(ferroviaria)
Trasformatore
di gruppo SSE
Trasformatore
di gruppo SSE
15 kV c.a.
~
Linea di contatto
16,67 Hz
binario
15 kV c.a. Linea di contatto
16,67 Hz
binario
~
La distribuzione centralizzata è
caratterizzata dalla presenza di
una rete di distribuzione
monofase ad Alta Tensione,
funzionante alla frequenza di 16
2/3 Hz per il solo uso
ferroviario. Tale alimentazione
è ottiene con gruppi di
produzione
monofasi
che
producono
l’energia
direttamente alla frequenza di
16 2/3 Hz oppure con stazioni
di conversione di frequenza che
prelevano l’energia dalla rete AT
a 50 Hz.
88
15kV in c. a. a frequenza 16 e 2/3Hz distribuita
Linea primaria AT
Centrali di
produzione
di energia
elettrica
50 Hz
220 kV c.a.
Stazione di
smistamento
9-25 kV c.a.
Linea di distribuzione MT
Ente distributore
Impianti ferroviari
Trasformatore
di gruppo SSE
SSE – Sottostazione
Elettrica
Convertitore
di frequenza
15 kV c.a.
16,67 Hz
~
~
Linea di contatto TE
binario
I paesi scandinavi hanno seguito una
filosofia diversa di elettrificazione
adottando il cosiddetto sistema a
conversione
distribuito:
le
sottostazioni,
sono
collegate
direttamente alla rete industriale e
svolgono il duplice compito di
trasformazione e di conversione di
fase e di frequenza. In questo modo
sia la conversione alla frequenza
ferroviaria sia la trasformazione
avvengono
nelle
stesse
SSE
risparmiando moltissimo sulle linee
primarie.
89
25 kV in corrente alternata a frequenza 50 Hz
R
Linea primaria AT
380 kV c.a., 50 Hz
I collegamenti alle coppie di
S
T
fasi della rete AT variano
VSR
VTS
T
VRT
ciclicamente da una SSE alla
VRT
R
VTS
S
VSR
successiva, per cui ciascuna
tratta (RS-ST) viene suddivisa
Ente distributore
in due sottotratte, alimentate
Impianti ferroviari
con fasi diverse (10-20) e
3
1
V1
V3
0
separate in centro da una
zona neutra.
V2
2
V
1
1
alla linea di
contatto TE
2
0
al binario
V2
3
0
25 kV c.a.
50 Hz
V3
0
90
2x 25 kV in corrente alternata a frequenza 50 Hzc
Centrale di
produzione di
energia elettrica
Linea AT 380 kVc.a. 50Hz
250 MVA
250 MVA
Linea AT
150 kVc.a. 50Hz
Ente distributore
Impianti ferroviari
Linea AT 150 kVc.a. 50Hz
Corrente
alternata
L = 25 km
60 MVA
SSE AV
60 MVA
SSE AV
Corrente
alternata
Posto di parallelo Semplice
2x25 kV c.a.
Feeder
SSP
Linea di contatto
Binario
91
Trazione elettrica ferroviaria: TE 25kV c.a.
92
Trazione elettrica ferroviaria: TE 25kV c.a.
93
Trazione elettrica ferroviaria: TE 25kV c.a.
94