Lezione XII -c
Avviare la presentazione col tasto “Invio”
1
Alcune applicazioni del moto armonico
2
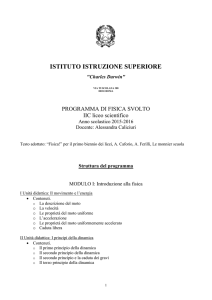
Il pendolo semplice
Il pendolo semplice è un sistema costituito da una massa puntiforme sospesa ad
un filo inestendibile. Quando viene spostata dalla sua posizione di equilibrio,
e abbandonato a se stesso, il pendolo oscilla in un piano verticale sotto l’azione
della forza di gravità. Il moto del pendolo è periodico e vogliamo calcolarne il periodo T
3
Riconsideriamo la geometria del sistema e definiamo gli assi di riferimento e le forze in gioco.
La massa vale m e il filo di lunghezza
l forma un angolo θ
con la verticale. Le forze che
agiscono sulla massa m sono la forza di gravità mg diretta in verticale verso il basso e T,
la tensione del filo. Scegliamo una coppia di assi cartesiani diretti uno verso il raggio e uno
verso la tangente al cerchio su cui si muove la massa. Scomponiamo mg in una componente
radiale mg
cos θ e una componente tangenziale mg sin θ
4
La componente radiale e la tensione del filo istante per istante sono uguali e contrarie
e infatti non c’è moto della massa m in senso radiale. La componente tangenziale
è la forza di richiamo esercitata su m tendente e ricondurla alla sua posizione di equilibrio.
La forza di richiamo pertanto è:
F = −m g sin θ
NOTA: la forza F non è proporzionale allo spostamento angolare θ ma a sin
θ
Il moto che ne risulta quindi NON è armonico
Tuttavia, se θ è piccolo
sin θ ≈ θ , dove θ
lungo l’arco di cerchio è x
=lθ
è espresso in radianti. Lo spostamento
e per piccoli angoli il moto è praticamente rettilineo
5
Quindi: assumendo
sin θ ≈ θ
si ha
𝑥
F = −m g θ = −m g
𝑙
=−
𝑚𝑔
x
𝑙
Questa è proprio la condizione di applicazione delle formula del moto armonico
F = −k x
𝑚𝑔
k=
𝑙
in cui
Quindi: per piccole oscillazioni, il periodo
T = 2π
𝑚
= 2π
𝑘
T del pendolo semplice
𝑙
𝑔
vale:
non dipende dalla massa m
6
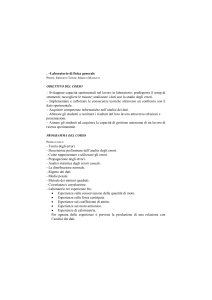
Il pendolo di torsione
Q
O
P
O
P
Supponiamo di avere un disco sospeso per il suo centro di massa da un filo. Il filo a sua
volta è solidamente ancorato ad un supporto fisso. Con il disco in posizione di equilibrio
tracciamo un segmento radiale che unisce il centro O con un punto P come in figura.
Se si ruota il disco sul piano orizzontale fino a portarlo alla posizione Q, il filo si torce
ed esercita pertanto un momento che tende a riportarlo alla posizione di equilibrio.
7
Il momento in questione quindi è un momento di richiamo che per la Legge di Hooke
è proporzionale alla entità della torsione. Cioè:
τ = −ϰ θ
Il simbolo ϰ è una costante che dipende dalle proprietà del filo e viene detta costate
di torsione. Il segno negativo indica il fatto che si tratta di un momento di richiamo.
In perfetta analogia col caso lineare dell’oscillatore armonico, scriveremo:
𝑑2𝜃
τ= Iα = I 2
𝑑𝑡
Che, utilizzando la
τ = −ϰ θ
diventa una equazione analoga
al caso lineare dell’oscillatore armonico:
𝑑2𝜃
−ϰ θ = I 2
𝑑𝑡
𝑑2𝜃
ϰ
θ
2 = −
𝑑𝑡
𝐼
8
Infatti, l’equazione differenziale in θ
𝑑2𝜃
ϰ
θ
2 = −
𝑑𝑡
𝐼
è identica alla equazione differenziale in x che abbiamo già visto per l’oscillatore
armonico lineare:
𝑑2𝑥
𝑘
=−
x
2
𝑑𝑡
𝑚
dove
I e ϰ hanno sostituito k e m, e la soluzione pertanto è
θ = θm cos (ωt + δ)
In analogia col caso lineare il periodo di oscillazione T è dato dalla:
T = 2π
𝐼
𝜘
9
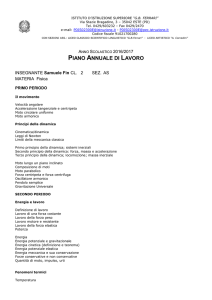
Il pendolo fisico
Ogni corpo che possa oscillare in un piano verticale intorno ad un determinato asse si
chiama pendolo fisico. Il pendolo fisico quindi è una generalizzazione del pendolo semplice.
10
Indichiamo con m la massa del corpo, con P il punto dove passa l’asse di rotazione, con C
il suo centro di massa e con I il suo momento di inerzia rispetto a P. Sia r il raggio vettore
P-C.
Supponiamo di spostare il corpo di un angolo
θ dalla sua
posizione di equilibrio
(che è quella in cui il centro di massa C giace sulla verticale passante per P).
P
θ
r
C
−m g
Il momento della forza di gravità
mg
sarà
τ = −mg r sin θ
11
Da questa formula
τ = −mg r sin θ
risulta che τ è proporzionale a sin
θ
e non a θ quindi la condizione per il moto armonico non sarebbe soddisfatta.
Tuttavia per piccoli angoli risulta sin
θ ≈θ
per cui potremo scrivere:
τ = −ϰ θ
dove:
ϰ = mg r
D’altra parte sappiamo che:
per cui potremo scrivere:
𝑑2𝜃
τ =I
𝑑𝑡2
𝑑2𝜃
𝑑𝑡2
= −ϰ θ / I
Questa equazione l’abbiamo già vista e porta alla:
T = 2π
𝐼
𝜘
= 2π
𝐼
𝑚g𝑟
12
Relazione fra il moto armonico e il moto circolare uniforme
Vedremo adesso che c’è una interessante relazione fra il moto armonico rettilineo e
il moto circolare uniforme. Inoltre, il moto circolare uniforme è anche l’esempio di una
composizione di moti armonici semplici, un fenomeno che incontreremo spesso nello
studio delle onde.
13
Si consideri un punto Q che si muove su di un cerchio di raggio A con velocità angolare
costante ω rad /sec. Il punto
e cioè sull’asse delle x.
P è la proiezione di Q sul diametro orizzontale,
y
Q
Chiameremo Q punto di riferimento e
il cerchio su cui Q si muove «cerchio di
riferimento». Mentre
avanti e indietro sul diametro orizzontale.
La coordinata x di
quella di
δ
Q gira, P si muove
O
P
x
P è sempre la stessa di
Q. Analogamente per le componenti
orizzontali della velocità e dell’accelerazione.
= 0, sia δ l’angolo formato dal raggio
OQ con l’asse x (angolo iniziale).
Al tempo t
t=0
14
Poiché la velocità angolare
ω è costante,
ad ogni istante di tempo successivo, l’angolo
ωt + δ
fra il raggio OQ e l’asse delle x sarà dato da
y
Pertanto, ad ogni istante la coordinata x di Q (e
x = A cos (ωt + δ)
P) sarà:
Q
ωt + δ
Quindi il punto P si muove di moto armonico
P
x
O
Cioè: il moto armonico può essere considerato
come la proiezione di un moto circolare uniforme
su di un diametro.
t > 0
15
A seguito di questa definizione del moto armonico riferito al moto circolare uniforme si ha:
• La
ω di un
moto armonico è la velocità angolare del punto di riferimento
• La frequenza del moto armonico equivale al numero di rivoluzioni nell’unità di tempo del
punto di riferimento
• Quindi
f = ω / 2π, e di conseguenza ω = 2π f
• Il tempo impiegato dal punto di riferimento a compiere una rivoluzione completa
equivale al periodo T del moto armonico.
• Quindi T
= 2π / ω
ossia
ω = 2π / T
• L’ampiezza del moto armonico equivale al raggio del cerchio di riferimento
• La fase ωt
+ δ del moto armonico corrisponde all’angolo formato dal
raggio rotante nel cerchio di riferimento
16
Se avessimo considerato la proiezione y invece che la proiezione x avremmo
ottenuto il seguente risultato:
y = A sin (ωt + δ)
Si tratta nuovamente di moto armonico, che differisce dal precedente soltanto
per la fase iniziale
δ − π/2
E infatti il moto armonico può essere ottenuto come proiezione su un qualunque
diametro del moto sul cerchio del punto di riferimento Q.
Inversamente, il moto circolare uniforme può essere ottenuto come combinazione
di due moti armonici
17
Composizione di moti armonici
Vediamo allora il caso più generale di moti risultanti dalla combinazione di
moti armonici ortogonali.
In fisica occorre di frequente il caso in cui un moto sia la combinazione di due moti
armonici rettilinei fra loro ortogonali, cioè la somma di due oscillazioni indipendenti
Ci soffermeremo adesso sul caso in cui le frequenze delle due vibrazioni sono le stesse:
x = Ax cos (ωt + δx)
y = Ay cos (ωt + δy)
Le due relazioni indicano due moti armonici ortogonali (uno lungo x e uno lungo y)
aventi la stessa frequenza angolare ω ma diversa ampiezza e fase
18
Nel caso in cui anche le fasi iniziali δx e
moto nel piano
x-y è rettilineo.
δy siano equali, è facile rendersi conto
che il
Infatti considerando le due equazioni:
x = Ax cos (ωt + δ)
y = Ay cos (ωt + δ)
e dividendole membro a membro, si ha:
𝑥
𝑦
=
Ax
Ay
e cioè
Ay
y= x
Ax
Questa è l’equazione di una retta nel piano x-y con pendenza
Ay / Ax
19
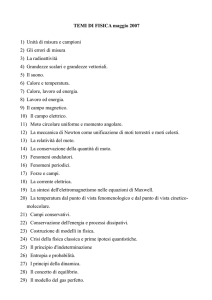
Quindi per δx
= δy si hanno per esempio i seguenti moti:
y
y
Ay
Ay
45°
O
Ay
=1
Ax
60°
Ax
O
x
Ax
x
Ay
=2
Ax
20
Se invece
δx ≠ δy si avranno in generale dei moti ellittici.
Ay
dell’ellisse è data sempre dal rapporto
Ax
In questo caso l’orientazione
mentre la differenza di fase determina il rapporto
fra i due semiassi dell’ellisse (infatti anche un segmento è un caso particolare di ellisse «chiusa»
21