Centro di Massa di corpi rigidi
• Il corpo rigido è un particolare sistema di punti materiali in cui le
distanze, tra due qualunque dei suoi punti, non variano nel tempo.
• Un corpo rigido non subisce alcuna deformazione anche se
sottoposto a sollecitazioni estremamente elevate (conserva la sua
forma).
• I corpi solidi possono, in prima approssimazione, essere considerati
rigidi. Il corpo rigido è quindi un’astrazione: in natura non ci saranno
mai corpi perfettamente rigidi.
1
Determinazione del CM
dm
dV
m = dm dV
V
dV
V
Se il corpo è omogeneo: è costante per
ogni elementino
m = dV V
V
m
i ri
n
rCM =
rCM =
rCM =
i 1
M
r dV
M
r dm
M
1
r dV r dV
M
V
2
Determinazione del CM
Densità
lineare
Densità
superficiale
Densità
volumetrica
dm
dl
dm
dS
dm
dV
3
Centro di Massa di corpi rigidi
• Se un corpo ha simmetria sferica il centro di massa coincide con il
centro geometrico della sfera.
• Se un corpo ha simmetria cilindrica, ossia la sua massa dipende solo
dalla distanza da un certo asse, il suo centro di massa deve giacere
sull’asse di simmetria.
• Se la massa di corpo è distribuita in modo simmetrico rispetto ad un
piano, il centro di massa deve cadere sul piano.
4
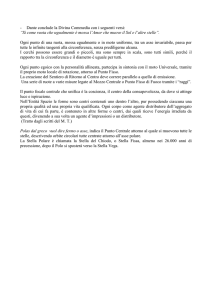
Esempio
In figura si vede una piastra quadrata di lamiera uniforme con lato di 6m, dalla
quale è stato ritagliato un pezzo quadrato di 2 m di lato con centro nel punto x =
2m,y = 0m L’origine delle coordinate coincide con il centro della piastra
quadrata. Trovare le coordinate x e y del CM.
CM Intera piastra (0,0 m)
CM1 da calcolare (x1,0) di m1=(36-4)M/36=8/9M
CM2 (2,0) m2=1/9M
n
m x
x CM =
n
mi yi
y CM =
i 1
M
0
per ragioni di simmetria
i 1
i
i
m1x1 m 2 x 2 (8 / 9 M ) x1 (1 / 9 M )2
0
M
M
M
1 9
x1 2 0.25m
9 8
5
Moti del corpo rigido
1) Traslazione
le orientazioni degli assi della terna solidale rimangano costanti (gli assi si
muovono mantenendosi paralleli a se stessi)
Tutti i punti del corpo rigido subiscono lo stesso spostamento nello stesso
intervallo di tempo che è lo stesso di quello subito dal CM
Tutti i punti sono fermi rispetto al centro di massa
È sufficiente determinare il moto del CM
Fest = Ma CM
2) Rotazione
Ptot = MvCM
1
EK = Mv 2 CM
2
3) Rototraslazione
6
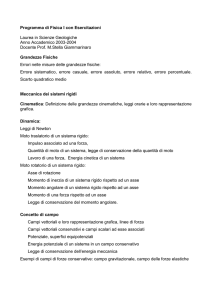
2) Moto rotatorio
O
P
Moto di un corpo rigido si dice
puramente rotatorio: se e solo se tutti
gli elementi del corpo si muovono lungo
una traiettoria circolare. I centri di tutte le
circonferenze devono cadere su una
stessa retta detta asse di rotazione. Il
piano della traiettoria è perpendicolare
all’asse di rotazione.
Linea di riferimento
Moto di un corpo rigido si dice puramente rotatorio attorno ad
un asse se e solo se tutte le linee di riferimento ortogonali all’asse
descrivono angoli uguali in intervalli di tempo uguali.
7
Variabili rotazionali
La posizione del corpo è
specificata dalla posizione di
un suo elemento P.
P
P
2D
A
s
r
radianti
2p rad= 360°
1 rad = 57.3°
Moto 2D di un elemento lungo
una circonferenza di raggio r (PA).
Verso positivo è scelto quello
antiorario rispetto al’asse z.
q individua la posizione angolare
della linea di riferimento
8
Variabili rotazionali
Spostament o angolare :
[rad/s]
t
d
la velocità istantanea : lim
dt
t 0 t
la velocità angolare media :
In un moto puramente rotatorio di un corpo
rigido: tutti i suoi elementi hanno la stessa .
Se P ha una non costante:
[rad/s2]
accelerazi one angolare media :
t
d
accelerazi one istantanea : lim
dt
t 0 t
In un moto puramente rotatorio di un corpo rigido: tutti i suoi
elementi hanno la stessa .
9
Relazione tra variabili lineari e angolari
s
r
radianti
ds d
r vT r
dt dt
dv T d
r a T r
dt
dt
2
vT
2
aR
r
r
10
Variabili rotazionali vettoriali
Entrambi vettori
d
dt
d
dt
è un vettore di modulo dq/dt, direzione perpendicolare al
piano della circonferenza, il verso della rotazione determina il
verso in cui punta il vettore (regola della mano destra).
11
Relazioni Vettoriali
R modulo Rsen r
v
v R
R
Rsen r
dv d ( R) d ( ) d ( R)
a
R
dt
dt
dt
dt
R v
Acc. tangenziale
Acc. centripeta
12
Dinamica dei moti rotatori
F ma
F
Dinamica del punto
materiale
Asse di rotazione
• dipende dalla forza e dal
punto in cui viene applicata
(momento di F)
• dipende dalla distribuzione
della massa rispetto all’asse di
rotazione (momento di inerzia)
0
0
0
13
Rotazioni attorno ad un asse fisso
dL
dt
v
Tutti i punti hanno la stessa ma v diversa.
z asse di rotazione : // z
v i forma un angolo i con l' asse z di rotazione
Ri v i
R
Li Ri mi vi
Liz Li cos(
Li Ri mi vi Ri mii ri
i
i ) Li seni
2
2
Ri mii ri seni Ri mii
Lz Liz (mi R 2 i ) I z
i
p
Momento di inerzia rispetto
asse z
14
Momento di inerzia
La massa è una caratteristica univoca di un corpo.
Il momento di inerzia dipende da come è distribuita la massa del corpo
rispetto all’asse di rotazione. Non è una caratteristica del corpo
Massa vicino all’asse di rotazione…
minore inerzia …
minore resistenza alla rotazione
massa in media in regioni più lontane dall’asse di
rotazione
maggiore inerzia …
maggiore resistenza alla rotazione
15
Momento di inerzia dei corpi rigidi
n
I z mi R
i 1
2
i
Corpo rigido: distribuzione continua di
massa, suddivisa in infiniti elementi di
massa infinitesima m
n
I z lim mi R
m 0 i 1
2
i
I R dm
2
16
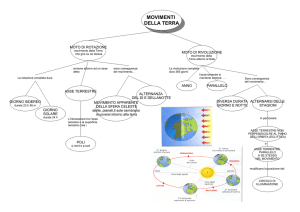
Tabella Momenti di inerzia
17
Rotazioni ottorno ad un asse fisso
v
R
Lz I z
L e non sono in generale //
Lz costante
L ruota
18
Simmetria Assiale
L
Lz I z
Due particella di stessa massa
che ruotano attorno all’asse.
L //
Un corpo rigido è simmetrico attorno ad un asse se e solo se per
ciascun elemento ne esiste un secondo di ugual massa posto alla
stessa distanza dall’asse sulla retta ad esso ortogonale passante per
il punto occupato dal primo elemento.
19
Assi principali di inerzia
Corpo rigido in rotazione attorno ad un suo asse di simmetria:
L I z
Ogni corpo per un suo punto passano almeno tre assi (assi principali
di inerzia) ortogonali tra loro tale che quando il corpo ruota rispetto
ad uno di essi:
20
Equazione del moto di rotazione
Se
L //
L I z
dL d (I z )
d ( )
Iz
I z
dt
dt
dt
I z
Sia L , e
sono // asse di rotazione
t
(t) 0 dt
0
t
Noto Iz ed si ottiene
la legge oraria.
(t) 0 dt
0
21
Equazione del moto
Moto circolare uniformemente
accelerato
cost
x
vω
t 0 ω0 (t - t 0 ) α(t - t 0 ) 2
ωt ω0 α(t - t 0 )
1
2
αt cost
a
Fermo o di Moto circolare uniforme
0
x
vω
t 0 ω0 t
ωt ω0 cost
0
v2
a aN
ω2 0 R
R
22
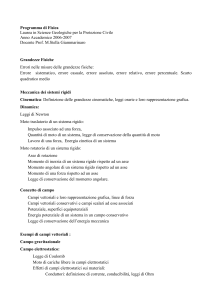
Conservazione momento angolare: applicazioni
I + grande
I + piccolo
Il momento delle forze esterne
rispetto al CM è nullo
I + grande
I + piccolo
Lz I z
I + grande
23
Il Teorema di Huygens Steiner
Il momento di inerzia di un corpo rispetto ad un asse qualunque è
uguale alla somma del momento di inerzia rispetto ad un asse parallelo
al primo ma passante per il centro di massa e di un termine pari al
prodotto della massa totale del corpo per la distanza al quadrato tra i
due assi.
I I CM Md 2
y
’
y’
y
yi
i
d
O
CM x’
i
xi
x
’
x
24
Il Teorema di Huygens Steiner
y
’
y’
y
yi
x’i, , y’i coordinate di mi nel sistema CM
mii
xi, , yi coordinate di mi nel sistema con O
i
r’i
ri
O
d
CM x’
i
b
a
xi
I mi ri 2 mi ( xi2 yi2 )
x
’
i
i
I mi ( xi' xCM ) 2 ( yi' yCM ) 2
x
i
'
'
'
'
m
x
x
2
x
x
y
y
2
y
i i CM
i CM
i
CM
i yCM
xi xi xCM
'
yi yi yCM
'
2
2
2
2
i
I mi ( xi' yi' ) 2 xCM mi xi' 2 yCM mi yi' ( xCM yCM ) mi
2
i
2
2
i
ICM
i
Mx 'CM mi x'i 0
i
2
i
d2
25
Momento forza di gravità
Una sbarra lasciata libera di ruotare
attorno ad un asse orizzontale ruota
sotto l’azione della forza di gravità
Su ciascun elementino infinitesimo, di cui è composta la sbarra, agisce
la forza di gravità che esercita un momento torcente.
L’insieme di tutte le forze che agiscono sulla sbarra può essere sostituito
da una sola forza……….
F Fi mi g Mg
i
i
26
Centro di Massa e baricentro
y
..applicata in un punto detto baricentro
mii
i ri mi g mi ri g
i
i
CM
i
MrCM
i MrCM g rCM Mg
O
x
i
Il momento torcente totale rispetto ad O dovuto alla forza gravitazionale
è pari al momento rispetto ad O della forza Mg applicata al CM.
Attenzione: baricentro e CM coincidono solo nel caso del
campo gravitazionale uniforme, e sono due concetti distinti.
27
Statica dei corpi rigidi con asse fisso
Condizione necessaria ( ma non sufficiente) perché un corpo rigido sia fermo è che:
l’accelerazione del suo centro di massa sia nulla
l’accelerazione angolare sia nulla rispetto a qualsiasi asse passante per il centro
di massa.
MaCM Rest
I Mz
est
R 0
M est 0
Le due condizioni non sono sufficienti perché, anche se soddisfatte, il corpo
potrebbe:
– muoversi con velocità del centro di massa costante (moto rettilineo uniforme)
– ruotare con velocità angolare costante attorno ad un asse centrale di inerzia
Occorre quindi che il corpo occupi la posizione iniziale con
– velocità del centro di massa nulla
– velocità angolare nulla rispetto a qualunque asse passante per il centro di massa
28
Energia cinetica nel moto rotatorio
Corpo rigido che ruota attorno asse fisso
v1
v2
1
1
2
E K m i v i m i r 2 i 2
i 2
i 2
1
K mv 2
2
1 2
E K I
2
Se
L //
vi ri
L I z
1 L2
EK
2 Iz
29
Lavoro nel moto rotatorio
Lavoro compiuto da una forza F su un corpo rigido che ruota attorno
ad un asse fisso:
F
r
dq
1
1
2
2
W E K I fin Iin
2
2
f
d
dW dE K Id I
dt
dt
Id z d
componente del momento
torcente di F attorno a z
qf
W z dq
qi
xf
W Fz dx
xi
30
3) Moto di rototraslazione: di puro rotolamento
B
C
A
vcm
vcm
vcm
r
B
C
A
r
B 2vcm
vcm
C
2vcm
C
vcm
A
Sovrapposizione di un moto di traslazione e di un
moto di rotazione attorno ad un asse perpendicolare
alla figura e passante per il centro di massa
I punti della ruota a contatto con l’asfalto sono fermi rispetto
all’asfalto
(non scorrono, non strisciano sull’asfalto):
rotolamento senza strisciamento (oppure puro rotolamento).
31
Moto di puro rotolamento
x> 0
2vcm
vcm
C
2vcm
C
vcm
q<0
Consideriamo due istanti successivi t1 e t2.
• Lo spostamento subito dal centro della ruota x è pari alla distanza tra i
punti di contatto della ruota agli istanti t1 e t2.
• Nello stesso tempo la ruota avrà subito anche uno rotazione e quindi
uno spostamento angolare q.
Se il moto è di puro rotolamento deve esistere una relazione tra questi due
spostamenti..
x r
v CM r
a CM r
N.B.:Il segno meno dipende solo dal sistema di riferimento usato.
32
Moto rototraslatorio
Combiniamo il moto rotatorio attorno asse passante per CM e
traslatorio nel piano xy
ri
P
CM
rCM
1
Mv 2 CM
2
1
2
K mi vi
i 2
ri rCM ri
v i v CM v i
1
1
m
(
v
v
)
m
(
v
v
)
(
v
v
i 2 i i i i 2 i CM i CM i )
1
2
mi (v CM 2vi v CM v 2 i )
i 2
1
1
2
K Mv CM I CM 2
2
2
v CM mi vi 0
vi ri
i
33
Ruolo della forza di attrito
Nel moto di puro rotolamento il punto di contatto della ruota con
l’asfalto è fermo rispetto all’asfalto.
Il compito di mantenere fermo rispetto al piano di appoggio il punto (o
i punti) di contatto è affidato alla forza di attrito, statica proprio perché
il punto di contatto non scivola sulla superficie di appoggio.
• Senza attrito questo tipo di moto non è realizzabile!!
• La forza di attrito statico, è limitata superiormente, per cui non
sempre è garantito il moto di puro rotolamento:
– frenate brusche fatte con l’automobile in cui si bloccano le
ruote che scivolano sull’asfalto
Occorre verificare caso per caso se la forza di attrito statico sia
sufficiente per garantire il moto di puro rotolamento
34
Interpretazione del moto di puro rotolamento
Pura rotazione attorno ad un asse perpendicolare alla figura passante
per i punti di contatto.
L’asse di rotazione cambia continuamente (si parla di asse
istantaneo di rotazione.
Comunque istante per istante il moto di ogni punto della ruota è
uguale a quello che avrebbe se la ruota ruotasse attorno ad un asse
fisso passante per i punti di contatto.
35
Corpi simmetrici e asimmetrici
La sbarra con corpi di massa m è rigidamente connessa con l’albero
centrale. Il corpo non è simmetrico rispetto all’asse di rotazione e l’asse di
rotazione non è un asse principale d’inerzia:
L non //
L’albero ruota a velocità angolare constante.
L costante in modulo
ma ruota attorna all' asse
Precede attorno all’asse
36
Corpi simmetrici e asimmetrici
dL
dt
• Il momento torcente delle forze esterne è
dovuto alle forze che i sostegni esercitano
sull’albero:
• Per mantenere i due punti materiali sulla
traiettoria circolare occorre applicare a
ciascun punto materiale una forza centripeta.
• il cui momento è ortogonale a piano
individuato da
z = 0 z costante
L e
37
Poiché
non hanno nessun altra funzione che
quella di far precedere il momento
angolare attorno all’asse di rotazione
non hanno alcuna influenza sulla
velocità angolare
Ma al tempo sottopongono a sforzi
inutili tutta la struttura (l’asse di
rotazione, i cuscinetti, etc)
Si preferisce lavorare in modo che il momento angolare sia
parallelo all’asse di rotazione (in cui tali forze non sono
richieste)
Questo si ottiene “equilibrando” il corpo rigido rispetto all’asse
di rotazione (equilibrature delle gomme dell’automobile)
38
La Trottola
Consideriamo il moto della trottola in rotazione
attorno al suo asse di simmetria.
L’asse di rotazione precede ossia si muove attorno
all’asse verticale.
r
• Il momento torcente della forza P:
P
Mgrsen
O
• perpendicolare sia all’asse di rotazione che ad L
• modifica la direzione di L, ma non il modulo:
dL dt
39
Equazione del moto
L non è //
dL z
I z
dt
z Iz
dL
M
dt
Da cui si ricavano le leggio orarie
esattamente come prima
non determina variazion e di
40
Trottola: moto di precessione
df
P
dt
df
L
O
L dL
dL
dt
df
Lsen Lsen
Mgrsen Mgr
P
Lsen
Lsen
L
La velocità angolare di precessione è inversamente
proporzionale ad L e quindi alla velocità angolare di
rotazione attorno all’asse di simmetria
41