Lezione 9
Code con priorità
Ordinamento
Sommario
• Code con priorità
• Ordinamento
–
–
–
–
Selection Sort
Bubble Sort
Heap Sort
Quick Sort
Coda con priorità
• Una coda con priorità è una struttura dati dinamica
che permette di gestire una collezione di dati con
chiave numerica.
• Una coda con priorità offre le operazioni di
– inserimento: di un elemento nell’insieme
– massimo: restituisce l’elemento con chiave più grande
– cancellazione-massimo: restituisce l’elemento con chiave
più grande e lo rimuove dalla collezione
Applicazioni della Coda con Priorità
• Le Code con priorità sono strutture dati molto comuni
in informatica.
• Es:
– Gestione di processi: ad ogni processo viene associata una
priorità. Una coda con priorità permette di conoscere in ogni
istante il processo con priorità maggiore. In qualsiasi
momento i processi possono essere eliminati dalla coda o
nuovi processi con priorità arbitraria possono essere inseriti
nella coda.
• Per implementare una coda con priorità utilizzeremo
una struttura dati chiamata heap
Nota su gli alberi binari
• Intuitivamente (vedremo meglio successivamente) un
albero binario è una struttura dati formata da nodi
collegati fra di loro (come per la struttura dati lista)
• come per una lista, per ogni nodo esiste un unico
nodo predecessore
• a differenza di una lista, ogni nodo è collegato con
uno o due nodi successori
Heap
• La struttura dati heap binario è un albero binario
quasi completo
• un albero binario quasi completo è un albero binario
riempito completamente su tutti i livelli tranne
eventualmente l’ultimo che è riempito da sinistra a
destra
Heap
• Perché un albero binario quasi completo sia uno
heap deve valere la seguente:
• Proprietà dell’ordinamento parziale dello heap
– il valore di un nodo figlio (successore) è minore o uguale a
quello del nodo padre (predecessore)
Heap
• Si implementa l’albero tramite un vettore
• Uno heap A ha un attributo heap-size[A] che specifica
il numero di elementi contenuto nello heap
• nessun elemento in A[1,length[A]] dopo heap-size[A]
è un elemento valido dello heap
• La radice dell’albero è A[1]
• L’indice del padre di un nodo di posizione i è i/2
• L’indice del figlio sinistro di un nodo i è 2 i
• L’indice del figlio destro di un nodo i è 2 i +1
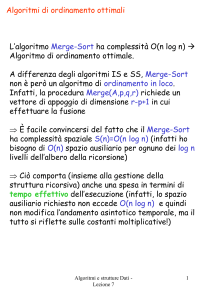
Visualizzazione di uno heap
1 2 3 4 5 6 7 8 9 10
16 14 10 8 7 9 3 2 4 1
1
2
4
8
2
9
4
3 10
14
5
8
16
10
7
1
6
9
7
3
Pseudocodice Operazioni Heap
Parent(i)
1 return i/2
Left(i)
1 return 2 i
Right(i)
1 return 2 i + 1
Mantenimento proprietà heap
• A seguito di varie operazioni sullo heap può accadere
che un nodo violi la proprietà dello heap
• La procedura Heapify prende in ingresso uno heap A
e l’indice i di un nodo che potenzialmente viola la
proprietà e ristabilisce la proprietà di ordinamento
parziale sull’intero heap
• si assume che i sottoalberi figli del nodo i siano radici
di heap che rispettano la proprietà di ordinamento
parziale
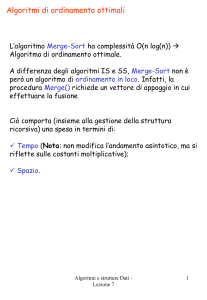
Spiegazione
• L’idea è di far “affondare” il nodo che viola la
proprietà di ordinamento parziale fino a che la
proprietà non viene ripristinata
• per fare questo si determina il nodo figlio più grande
e si scambia il valore della chiave fra padre e figlio
• si itera ricorsivamente il procedimento sul nodo figlio
sostituito
Pseudocodice Heapify
Heapify(A,i)
1 l Left(i)
2 r Right(i)
3 if l heap-size[A] e A[l]>A[i]
4
then
largest l
5
else
largest i
6 if r heap-size[A] e A[r]>A[largest]
7
then
largest r
8 if largest i
9
then
scambia A[i] A[largest]
10
Heapify(A,largest)
Visualizzazione Heapify
16
4
i
14
2
16
10
7
8
14
9
3
i
4
1
2
16
14
8
2
10
7
4
1
9
3
10
7
8
1
9
3
Nota sugli alberi binari
• Un albero binario completo di altezza h ha 2h+1-1 nodi
• infatti intuitivamente:
– un albero binario completo di altezza 0 ha un unico nodo: la
radice
– un albero binario completo di altezza 1 è composto dalla
radice e dai suoi due figli
– all’aumentare di un livello ogni figlio genera altri due figli e
quindi si raddoppia il numero di nodi del livello precedente
• Ogni livello di un albero binario completo contiene
tanti nodi quanti sono contenuti in tutti i livelli
precedenti +1
– infatti passando da h a h+1 si passa da 2h+1-1 a 2h+2-1 nodi
ovvero a 2(2h+1) -1 nodi quindi il nuovo livello ha aggiunto
2h+1 nodi ad un albero che prima ne conteneva 2h+1-1
Tempo di calcolo di Heapify
• Le istruzioni per determinare il maggiore fra i, l e r
impiegano un tempo (1)
• Ricorsivamente si chiama Heapify su uno dei
sottoalberi radicati in l o r
• Il sottoalbero dei figli hanno al più dimensione 2n/3
– il caso peggiore è quando l’ultimo livello è pieno per metà
ovvero uno dei sottoalberi è completo
• Il tempo di esecuzione è pertanto:
• T(n)=T(2n/3)+ (1)
• per il Teorema Principale si ha T(n)= (lg n)
Costruzione di uno heap
• Si può usare la procedura Heapify in modo bottomup, cioè a partire dai livelli più bassi dell’albero, per
convertire un Array in uno Heap
• Gli elementi A[ n/2 +1 .. n] sono tutte foglie
dell’albero e pertanto ognuno di essi è già uno heap
di 1 elemento
• Si inizia dagli elementi padri dei nodi A[ n/2 +1 .. n]
• Dato che procediamo in modo bottom-up allora
sicuramente i sottoalberi di un nodo sottoposto a
Heapify sono heap
Pseudocodice Costruzione Heap
Build-Heap(A)
1 heap-size[A] Length[A]
2 for i length[A]/2 downto 1
3
do Heapify(A,i)
Visualizzazione Costruzione
1 2 3 4 5 6 7 8 9 10
4 1
3 2 16 9 10 14 8 7
4
4
1
2
14
1
3
16 9
2
10
14
8 7
3
16 9
14
2
10
14
2
3
16 9
16
16 9
14
3
2
16
10
7
8 1
10
8 7
4
10
8 7
1
8 7
4
1
4
9
14
3
8
2
10
7
4 1
9
3
Coda con priorità con heap
• Risulta semplice implementare le varie operazioni di
una coda con priorità utilizzando uno heap
– Extract Max: basta restituire la radice dello heap
– Heap Extract Max: dopo la restituzione dell’elemento
massimo, posiziona l’ultimo elemento dello heap nella radice
ed esegue Heapify per ripristinare la proprietà di
ordinamento parziale
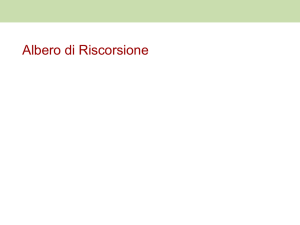
– Heap Insert: la procedura inserisce il nuovo elemento come
elemento successivo all’ultimo e lo fa salire fino alla
posizione giusta facendo “scendere” tutti padri
Pseudo codice operazioni di coda con
priorità
Heap-Extract-Max(A)
1 max A[1]
2 A[1] A[heap-size[A]]
3 heap-size[A] heap-size[A]-1
4 Heapify(A,1)
5 return max
Heap-Insert(A,key)
1 heap-size[A] heap-size[A]+1
2 i heap-size[A]
3 while i>1 e A[Parent(i)]<key
4
do
A[i] A[Parent(i)]
5
i Parent(i)
6 A[i] key
Visualizzazione Heap Insert
16
16
14
10
14
10
Key:15
8
7
9
3
8
2
4
3
1
2
16
/
8
2
9
7
/
1
10
9
14
4
4
1
7
16
15
3
8
2
10
9
14
4
1
7
3
Ordinamento
• Il problema consiste nell’elaborare insiemi di dati
costituiti da record
• Esiste un elemento del record è detto chiave
• L’obiettivo dei metodi di ordinamento consiste nel
riorganizzare i dati in modo che le loro chiavi siano
disposte secondo un ordine specificato
(generalmente numerico o alfabetico)
Metodi
• Si distinguono metodi:
– interni: se l’insieme di dati è contenuto nella memoria
principale
– esterni: se l’insieme di dati è immagazzinato su disco o
nastro
• Per metodi interni è possibile l’accesso casuale ai
dati, mentre per i metodi esterni è possibile solo
l’accesso sequenziale o a grandi blocchi
Tipo di ordinamento
• Si distinguono i metodi di ordinamento in stabili o non
stabili.
• Un metodo di ordinamento si dice stabile se preserva
l’ordine relativo dei dati con chiavi uguali all’interno
del file da ordinare
• Se si usa un metodo stabile per ordinare per anno di
corso una lista di studenti già ordinata
alfabeticamente otterremo una lista in cui gli studenti
dello stesso anno sono ordinati alfabeticamente
Tipo di ordinamento
• Si distinguono i metodi di ordinamento in diretti o
indiretti.
• Un metodo di ordinamento si dice diretto se accede
all’intero record del dato da confrontare, indiretto se
utilizza dei riferimenti (puntatori) per accedervi
• Metodi indiretti sono utili quando si devono ordinare
dati di grandi dimensioni
• In questo modo non è necessario spostare i dati in
memoria ma solo i puntatori ad essi.
Tipo di ordinamento
• Si distinguono i metodi di ordinamento sul posto e
non, che fanno cioè uso di strutture ausiliare
• Un metodo si dice che ordina sul posto se durante
l’elaborazione riorganizza gli elementi del vettore in
ingresso all’interno del vettore stesso
• Se il metodo, per poter operare, ha necessità di
allocare un vettore di appoggio dove copiare i risultati
parziali o finali dell’elaborazione (della stessa
dimensione del vettore in ingresso) abbiamo il
secondo caso
Selection Sort
• E’ uno degli algoritmi più semplici
• Il principio è:
–
–
–
–
si determina l’elemento più piccolo di tutto il vettore
lo si scambia con l’elemento in prima posizione del vettore
si cerca il secondo elemento più grande
lo si scambia con l’elemento in seconda posizione del
vettore
– si procede fino a quando l’intero vettore è ordinato
• Il nome deriva dal fatto che si seleziona di volta in
volta il più piccolo elemento fra quelli rimanenti
Pseudocodice per SelectionSort
SelectionSort(A)
1 for i 1 to length[A]
2
do min i
3
for j i+1 to length[A]
4
do if(A[j]<A[min])
5
then min j
6
scambia A[i] A[min]
Caratteristiche del SelectionSort
• Il tempo di calcolo è T(n)= (n2)
• infatti:
– per ogni dato di posizione i si eseguono n-1-i confronti
– il numero totale di confronti è pertanto (posto j= n-1-i )
• j=n-1..1 j = n(n-1)/2 = (n2)
• Più precisamente il Selection Sort effettua circa n2/2
confronti e n scambi
Caratteristiche del SelectionSort
• Uno svantaggio è che il tempo di esecuzione non
dipende (in modo significativo) dal grado di
ordinamento dei dati iniziali
• Un vantaggio è che ogni elemento è spostato una
sola volta.
– Se è necessario spostare i dati, allora per dati molto grandi
questo è l’algoritmo che asintoticamente effettua il minor
numero di spostamenti possibili.
– Se il tempo di spostamento è dominante rispetto al tempo di
confronto diventa un algoritmo interessante
BubbleSort
• E’ un metodo elementare
• Il principio di funzionamento è:
– si attraversa il vettore scambiando coppie di elementi
adiacenti
– ci si ferma quando non è più richiesto alcuno scambio
• Il nome deriva dal seguente fenomeno:
– quando durante l’attraversamento si incontra l’elemento più
piccolo non ancora ordinato questo viene sempre scambiato
con tutti, affiorando fino alla posizione giusta come una bolla
– nel processo gli elementi maggiori affondano e quelli più
leggeri salgono a galla
PseudoCodice per il BubbleSort
BubbleSort(A)
1 for i 1 to length[A]
2 do for j length[A] downto i-1
4
do if(A[j-1] > A[j])
5
then scambia A[j-1] A[j]
Caratteristiche del BubbleSort
• Il tempo di calcolo è T(n)= (n2)
• infatti:
– per ogni dato di posizione i si eseguono i confronti e i scambi
– il numero totale di confronti è pertanto
• i=1..n-1 i = n(n-1)/2 = (n2)
• Il Bubble Sort effettua circa n2/2 confronti e n2/2
scambi
• in generale è peggiore del selection sort
Heap Sort
• Il metodo di ordinamento Heap Sort sfrutta la
proprietà di ordinamento parziale dello Heap
• L’idea è di selezionare l’elemento più grande,
eliminarlo dallo heap e poi utilizzare la procedura
Heapify per ripristinare la proprietà di ordinamento
parziale
• in pratica piuttosto che eliminare gli elementi si
inseriscono come elemento più prossimo oltre i limiti
dello heap
Pseudocodice per HeapSort
HeapSort(A)
1 BuildHep(A)
2 for i length[A] downto 2
3 do
scambia A[1] A[i]
4
heap-size[A] heap-size[A]-1
5
Heapify(A,1)
Visualizzazione HeapSort
16
14
8
2
14
10
7 9
10
8
3
4 1
10
3
2
4
10
3
2 1
2
10
7 8
9
1
10
3
2 8
2
9
4
10
2
1
7 8
1416
9
14 16
3
3
1416
14 16
4
1416
4
3
7
7
1416
1
2
9
7 1
4
8
7 1
4
3
1 16
9
8
8
7 9
4
2
10
1
9
4
10
3
7 8
14 16
9
Tempo di Calcolo dell’HeapSort
•
•
•
•
•
L’algoritmo chiama n-1 volte la procedura Heapify
Si deve determinare il tempo di calcolo di Heapify
Abbiamo visto che per Heapify si ha T(n)= (lg n)
Pertanto il tempo di calcolo per HeapSort è:
T(n)= (n lg n)
QuickSort
• Il QuickSort, come il MergeSort, è un algoritmo
basato sul paradigma Divide et Impera
• Fasi:
– Divide: il vettore A[p..r] è riorganizzato in modo da avere due
sottosequenze A[p..q] e A[q+1..r] tali che qualsiasi elemento
in A[p..q] è minore di un qualsiasi elemento in A[q+1..r].
L’indice q è calcolato da questa procedura di
partizionamento
– Impera: le due sottosequenze sono ordinate ricorsivamente
– Combina: non ce ne è bisogno. Infatti, poiché le
sottosequenze sono già ordinate internamente e qualsiasi
elemento in A[p..q] è minore di un qualsiasi elemento in
A[q+1..r], l’intero vettore A[p..r] è subito ordinato
PseudoCodice
QuickSort(A,p,r)
1 if p<r
2 then q Partition(A,p,r)
3
QuickSort(A,p,q)
4
QuickSort(A,q+1,r)
Spiegazione Intuitiva della Procedura
Partition
• Si prende un elemento, ad es. il primo elemento della
prima sottosequenza, come elemento perno
p
r
5 3 2 6 4 1 3 7
x=A[p]=5
• si vuole dividere il vettore A in due sottosequenze:
– nella prima devono esserci solo elementi <= 5
– nella seconda solo elementi >=5
Spiegazione Intuitiva della Procedura
Partition
• Si fanno crescere due regioni da entrambi gli estremi,
utilizzando gli indici i,j a partire dagli estremi
i
i
Elementi <=5
j
Elementi >=5
j
Spiegazione Intuitiva della Procedura
Partition
• Mentre le due regioni crescono si verifica il valore
degli elementi
• Se un elemento non deve appartenere alla regione in
cui si trova (o se l’elemento ha un valore eguale al
valore perno) si smette di far crescere la regione
• Quando non è possibile far crescere nessuna delle
due regioni si scambiano gli elementi fra loro
i
i
j
j
7
Elementi <=5
3
Elementi >=5
3
Elementi <=5
7
Elementi >=5
Spiegazione Intuitiva della Procedura
Partition
• Quando i diventa maggiore di j allora abbiamo
completato le due regioni
• La procedura termina
i j
Elementi <=5
Elementi >=5
PseudoCodice per Partition
Partition(A,p,r)
1 x A[p]
2 i p-1
3 j r+1
4 while TRUE
5
do repeat j j-1
6
until A[j] x
7
repeat i i+1
8
until A[i] x
9
if i < j
10
then
scambia A[i] A[j]
11
else return j
Visualizzazione
i
j
5 3 2 6 4 1 3 7
i
j
5 3 2 6 4 1 3 7
i
j
3 3 2 6 4 1 5 7
i
j
3 3 2 1 4 6 5 7
i
j
3 3 2 1 4 6 5 7
i
j
5 3 2 6 4 1 3 7
i
j
3 3 2 6 4 1 5 7
i
j
3 3 2 6 4 1 5 7
i
j
3 3 2 1 4 6 5 7
j
i
3 3 2 1 4 6 5 7
Prestazioni del QuickSort
• Il tempo di esecuzione del QuickSort dipende dal
fatto che il partizionamento sia più o meno bilanciato
• il partizionamento dipende dagli elementi pivot.
• Se il partizionamento è bilanciato si hanno le stesse
prestazioni del MergeSort
• altrimenti può essere tanto lento quanto
l’InsertionSort
Caso peggiore
• Il caso di peggior sbilanciamento si ha quando il
partizionamento produce due sottosequenze di
lunghezza 1 e n-1
• Il partizionamento richiede un tempo (n) e il passo
base della ricorsione richiede T(1)=(1) pertanto:
• T(n)=T(n-1)+ (n)
• ad ogni passo si decrementa di 1 la dimensione
dell’input, occorreranno pertanto n passi per
completare la ricorsione
• T(n)= k=1..n(k) = (k=1..nk) = (n2)
Caso migliore
• Il caso migliore si ha se ad ogni partizionamento di
divide in due sottosequenze di dimensione identica
l’input
• in questo caso si ha, come nel caso del MergeSort
– T(n)=2T(n/2)+ (n)
• ovvero, per il Teorema Principale:
– T(n)= (n lg n)
Caso medio
• Per avere una intuizione di cosa accade nel caso
medio può risultare utile introdurre il concetto di
albero di ricorsione
Albero di ricorsione
• Un albero di ricorsione è un modo di visualizzare
cosa accade in un algoritmo divide et impera
• L’etichetta della radice rappresenta il costo non
ricorsivo della fase divide e combina
• la radice ha tanti figli quanti sottoproblemi generati
ricorsivamente
• ogni sottoproblema ha come etichetta il costo della
fase divide e combina del problema per la nuova
dimensione
• per ogni livello si indica la somma dei costi
• si conteggia il numero di livelli necessari per
terminare la ricorsione
Esempio di albero di ricorsione
• Per T(n)=2T(n/2)+n2 si ha:
n2
T(n/2)
T(n/2)
n2
(n/2)2
(n/2)2
T(n/4) T(n/4) T(n/4) T(n/4)
Esempio di albero di ricorsione
n2
(n/2)2
n2
(n/2)2
1/2 n2
lg n
(n/4)2 (n/4)2 (n/4)2 (n/4)2
1/4 n2
...
Totale = n2 i=1.. lg n 1/2i < n2 i=1.. 1/2i=2 n2
Totale = (n2)
Esempio di albero di ricorsione
• Per il calcolo dell’altezza dell’albero di ricorsione,
ovvero del numero di passi necessario per terminare
la ricorsione, si considera il cammino più lungo dalla
radice ad una foglia
• n2 >> (1/2n)2 >> ((1/2)2n)2 >> ((1/2)3n)2 >> ... >> 1
• Dato che
((1/2)i n)2 = 1
2i = n
log2 2i = log2 n
i = lg n
• ovvero h= lg n
Concetti intuitivi sul caso medio
• Si consideri un partizionamento “abbastanza”
sbilanciato che divida il problema in due sotto
sequenze di dimensione 1/10 e 9/10
• T(n)=T(n/10)+T(9n/10)+n
• dall’albero di ricorsione si ha che ogni livello costa n
• il numero di livelli è:
–
–
–
–
n>>9/10 n >>(9/10)2 n >>(9/10)3 n>>…>>1
ovvero (9/10)i n = 1
n = (10/9)i
i = log10/9 n
Albero di ricorsione
n
(n/10)
log10/9 n
n
(9n/10)
n
(n/100)(9n/100)(9n/100)(81n/100)
n
...
Totale = (n lg n)
Concetti intuitivi sul caso medio
• Con un partizionamento di 1 a 9 il quicksort viene
eseguito in un tempo asintoticamente eguale al caso
migliore di partizionamento bilanciato
• Anche una suddivisione 1 a 99 mantiene la proprietà
di esecuzione in tempo n lg n
• Il motivo è che qualsiasi suddivisione in proporzioni
costanti produce un albero di altezza lg n in cui ogni
livello costa (n)
• Tuttavia non possiamo aspettarci un partizionamento
costante nei casi reali
Concetti intuitivi sul caso medio
• Si suppone che in media si abbiano delle partizioni
buone e cattive distribuite durante lo svolgimento
dell’algoritmo
• si suppone per semplificare che le partizioni buone si
alternino a quelle cattive
• si suppone che la partizione buona sia la migliore
possibile, cioè quella derivante da un bilanciamento
perfetto
• e quella cattiva la peggiore possibile, cioè quella
derivante da una partizione 1, n-1
Concetti intuitivi sul caso medio
• Si ha pertanto un primo passo in cui si partiziona il
problema in due sottosequenze 1 e n-1 di costo n
• poi un secondo passo in cui
– si risolve in tempo costante il problema sulla sottosequenza
unitaria
– si partiziona ulteriormente la sequenza di lunghezza n-1 in
due sottosequenze di (n-1)/2 e (n-1)/2 elementi ad un costo
di n-1
• Il risultato è di aver raddoppiato il numero di passi
rispetto al caso di partizionamento ottimo, ma di
essere sostanzialmente arrivati nella stessa
situazione di buon partizionamento (n/2 contro (n1)/2) con un costo complessivo (n)
Concetti intuitivi sul caso medio
• In sintesi il costo del QuickSort per un caso medio in
cui si alternano partizioni buone a cattive è dello
stesso ordine di grandezza del caso migliore, e cioè
O(n lg n) anche se con costanti più grandi
Algoritmo Randomizzato
• Il caso medio si ottiene quando una qualsiasi
permutazione dei dati in ingresso è equiprobabile
• tuttavia nei casi reali questo può non essere vero: ad
esempio ci sono situazioni in cui i dati sono
parzialmente ordinati
• in questi casi le prestazioni del quicksort peggiorano
• piuttosto che ipotizzare una distribuzione dei dati in
ingresso è possibile imporre una distribuzione
• si chiama randomizzato un algoritmo il cui
comportamento è determinato non solo dall’ingresso
ma anche da un generatore di numeri casuale
Randomized QuickSort 1
• Prima di avviare la procedura di sort si esegue una
permutazione casuale degli elementi del vettore di
ingresso
• Il calcolo della permutazione deve avere un costo
O(n)
• Nessuna sequenza in ingresso comporta il caso
peggiore: tuttavia si può avere una cattiva
permutazione prodotta dal generatore casuale
• Tuttavia si può garantire che si generino pochissime
permutazioni cattive in media
PseudoCodice per la permutazione
casuale
Randomize(A,p,r)
1 for i 1 to length[A]
2 do
j Random(p,r)
3
scambia A[i] A[j]
Randomized QuickSort 2
• Ad ogli passo, prima di partizionare l’array si scambia
A[p] con un elemento scelto a caso in A[p..r]
• si sceglie cioè l’elemento pivot in modo casuale ad
ogni partizionamento
• Questo assicura che il pivot sia in modo
equiprobabile uno qualsiasi degli elementi in A[p..r]
• Ci si aspetta cosi’ che in media la suddivisione
dell’array sia ben bilanciata
PseudoCodice
Randomized-Partition(A,p,r)
1 i Random(p,r)
2 scambia A[p] A[i]
3 return Partition(A,p,r)
Randomized-QuickSort(A,p,r)
1 if p<r
2 then q RandomizedPartition(A,p,r)
3
Randomized-Quicksort(A,p,r)
4
Randomized-Quicksort(A,q+1,r)