UNIVERSITÁ DEGLI STUDI DI PADOVA
SEDE DI VICENZA
ANNO ACCADEMICO 1999-2000
PLC E FIELDBUS PER APPLICAZIONI
INDUSTRIALI IN LUOGHI PERICOLOSI
DIPLOMANDO: ANDREA RANZI
RELATORE: PROF. ING. STEFANO VITTURI
TUTORE PER L’AZIENDA: ING. FAUSTO BEGHELLI
TIROCINIO
SVOLTO PRESSO:
TECNICA ELETTRONICA S.P.A.
VIA SPALLANZANI, 26 - VERONA
SI OCCUPA DI:
PROGETTAZIONE, REALIZZAZIONE, INSTALLAZIONE E
ASSISTENZA DI SISTEMI PER L’AUTOMAZIONE
INDUSTRIALE
ATTIVITÁ SVOLTA NEL TIROCINIO
INSERIMENTO NEL GRUPPO DI PROGETTO
STUDIO DI ALCUNI ASPETTI CRITICI DELL’ IMPIANTO
sicurezza;
acquisizione dei segnali di campo e controllo dei dispositivi.
PARTECIPAZIONE AL PROGETTO, REALIZZAZIONE E
COLLAUDO DEL SISTEMA DI CONTROLLO.
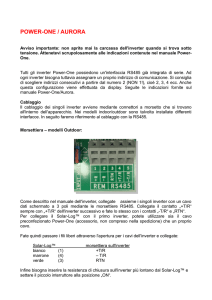
DESCRIZIONE IMPIANTO CHIMICO
Tutto l’impianto è considerato area pericolosa di CLASSE 1,
ZONA 1 (C1Z1).
L’impianto è composto da un sistema di condotti per portare i
componenti di base a:
- 6 bilance per il carico di contenitori da 1m³;
- 1 bilancia per il carico direttamente su camion;
- 1 bilancia per il carico della “chilolitrica”;
- 12 miscelatori per mescolare il prodotto finale.
Sono presenti 60 pompe per prelevare tali componenti dalle
cisterne
PROFIBUS DP
gateway DP/AS-I
+
Fieldbus
gateway DP/AS-I
+
Fieldbus
AS-Interface
AS-Interface
10
PLC SIEMENS S7
Pannello
INVERTER
Operatore
BARRIERE
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
3 pannelli operatore
315 stati di
315
elettrovalvole
valvola chiusa
HAZARDOUS AREA
60 livelli
cisterne
8 pesi
bilance
12 livelli segnali impulsivi
miscelatori di 2 contalitri
60 motori
pompe
SISTEMA DI CONTROLLO
E’ composto da un PLC S7 tramite:
- 11 schede con 8 ingressi analogici (segnali di peso e di livello);
- 4 schede con 32 ingressi digitali (stati motori pompe);
- 3 schede con 32 uscite digitali (comando motori pompe);
- rete PROFIBUS DP:
comando e stato inverter;
interazione uomo-macchina (HMI) tramite 4 pannelli
operatore (OP);
rete Fieldbus AS-Interface (Actuator/Sensor Interface)
per attuatori e sensori binari:
comando elettrovalvole e stato valvole di campo.
ARGOMENTI AFFRONTATI
Sicurezza dell’impianto:
- motori delle pompe in esecuzione Ex(d);
- sensori e attuatori di campo: componenti + barriere Ex(i).
Acquisizione e controllo del segnale di peso delle bilance;
Acquisizione e controllo del segnale di livello dei miscelatori e
delle cisterne esterne;
Controllo e gestione degli inverter.
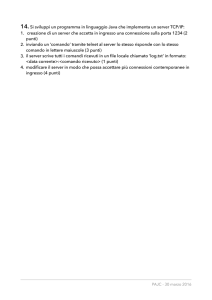
ACQUISIZIONE E CONTROLLO PESO
In campo (C1Z1):
Sensore di peso: cella di carico (ponte di Wheatstone):
input: 10V;
output: 0/30mV.
In zona sicura:
Barriera attiva per sicurezza intrinseca Ex(i).
Elettronica di condizionamento:
per acquisizione del segnale tramite A-I PLC;
circuito di SENSE.
ACQUISIZIONE E CONTROLLO PESO
Circuito di SENSE per mantenere l’alimentazione ai capi della
cella esattamente al valore di 10V.
Stadio taratura della bilancia
STADIO TARA
0-10V
+SENSE
-SENSE
+E
-E
STADIO
AMPLIFICATORE
CELLA
4-20mA
STADIO AMPLIFICATORE
PESO NETTO
STADIO V-I
+
+V
-V
PESO
LORDO
DISPLAY
ACQUISIZIONE E CONTROLLO LIVELLO
In campo (C1Z1):
Sensore e trasmettitore di livello in esecuzione Ex(i);
fornisce un segnale 4-20mA
In zona sicura:
Circuito di alimentazione.
Barriera attiva per sicurezza intrinseca Ex(i).
Acquisizione del segnale tramite A-I PLC.
ACQUISIZIONE E CONTROLLO LIVELLO
Alimentazione a 24V.
Caduta di tensione in ingresso della scheda A-I PLC tra 1V e 5V.
Tensione di alimentazione per il sistema sensore/trasmettitore
compresa tra 19V e 23V.
AREA SICURA
BARRIERA
ATTIVA Ex(i)
+
4-20mA
+24V
A-I PLC
250
AREA PERICOLOSA
SENSORE
+
TRASMETTITORE
DI LIVELLO
COMANDO E CONTROLLO INVERTER
Dieci inverter posizionati in sala controllo (zona sicura)
Ogni inverter può azionare sei diversi motori (naturalmente uno
per volta) per un totale di 60 motori.
Il PLC comanda l’inverter e, tramite le schede di D-O, chiude il
teleruttore corrispondente al motore da azionare.
Ciclicamente il PLC controlla lo stato ANOMALIA di tutti gli
inverter anche prima di passare il COMANDO DI MARCIA
per eliminare inutili perdite di tempo.
COMANDO E CONTROLLO INVERTER
COMANDO DI MARCIA
SET POINT di frequenza
CPU
PROFIBUS-DP
INVERTER
315-2DP
STATO ON / ANOMALIE
% DI FREQUENZA (VELOCITÁ)
% DI CORRENTE ASSORBITA DAL MOTORE
COLLAUDO IMPIANTO
INVERTER: parametrizzato secondo le specifiche dell’impianto:
protocollo PROFIBUS (indirizzo, baud rate, sistema remoto);
limite di corrente assorbita dal motore;
limite di frequenza (velocità);
modalità di regolazione “sensorless” (parametrizzazione software
del motore
encoder non utilizzato).
Acquisizione dei segnali di LIVELLO e PESO:
simulatore 4-20mA connesso alle schede A-I del PLC;
visualizzazione su pannello operatore del valore di
livello/peso in continuo aggiornamento.
SVILUPPO FUTURO DELL’IMPIANTO
Inserimento di un PC in sala controllo con funzioni di Workstation
connesso alla rete PROFIBUS-DP. Possibilità di:
Videografica per il controllo e comando dell’impianto (livelli,
pesi, percorsi dei prodotti, anomalie, misure, ecc…).
Archiviazione e esecuzione di ricette per la realizzazione della
miscela finale.
Teleassistenza via modem