1
La fisica e la motocicletta
Vittore Cossalter
Dipartimento di Ingegneria Meccanica
Università di Padova
Via Venezia 1, 35131 Padova (Italy)
Motorcycle Dynamics
Research Group
www.dinamoto.it
2
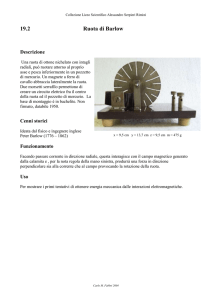
La motocicletta
La motocicletta è composta, considerando rigide le sospensioni, da quattro corpi:
•il corpo posteriore (telaio, motore, serbatoio, sella),
•L’avantreno (la forcella, il manubrio),
•la ruota anteriore,
•la ruota posteriore.
coppia rotoidale
CORPI RIGIDI
corpo post.
avantreno
CONSTRAINTS
coppia rotoidale
manubrio
2° rotazione manubrio
vincolo punto
di contatto
ruota ant.
ruota ant.
anteriore
ruota post.
4x6=24
ruota post.
posteriore
3x5=15
2=avantreno
1= corpo
posteriore
3=ruota anteriore
coppia rotoidale
4 = ruota posteriore
+
punto di contatto anteriore
2x3=6
numero dei gradi di libertà = 24-21 = 3
3° moto di rollio
1° rotazione ruota
(moto di avanzamento)
coppia rotoidale
punto di contatto posteriore
1° g.d.l. rotazione della ruota posteriore (moto di avanzamento)
2° g.d.l. rotazione del manubrio
3° g.d.l. moto di rollio
Motorcycle Dynamics
Research Group
www.dinamoto.it
3
•ARGOMENTI:
•Gli effetti giroscopici nella motocicletta sono importanti?
•Come si guida una motocicletta?
•Perché la motocicletta può diventare instabile e quindi
pericolosa?
•Attorno a quale asse ruota la motocicletta durante
l’inserimento in curva?
•Quale sarà l’evoluzione futura della motocicletta?
Motorcycle Dynamics
Research Group
www.dinamoto.it
4
Gli effetti giroscopici della motocicletta.
zm
Effetto giroscopico
del moto di imbardata:
zf
velocità rotazione
ruota posteriore
momento
giroscopic
x
velocità rotazione
motore
velocità di
imbardata
velocità rotazione
ruota anteriore
angolo di rollio
xf
y
Motorcycle Dynamics
Research Group
www.dinamoto.it
L’effetto giroscopico “ruote, motore-moto imbardata”
si manifesta con un momento raddrizzante.
t
yf
5
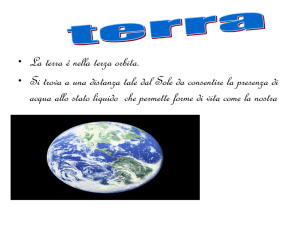
Gli effetti giroscopici della motocicletta.
angolo di rollio ideale
Effetto giroscopico
del moto di imbardata:
R
i deal= arctg c
g
zm
maggiore inclinazione
dovuta al momento
giroscopico
h
L’angolo di rollio reale risulta
maggiore dell’angolo di rollio
teorico
momento
giroscopico
Il motore ruota nello stesso verso delle ruote
Il motore ruota nel verso opposto
L’asse di rotazione del motore è longitudinale
Motorcycle Dynamics
Research Group
www.dinamoto.it
L’effetto del motore si somma a quello delle ruote
L’effetto del motore si sottrae a quello delle ruote
L’effetto giroscopico del motore non influenza
l’angolo di rollio
6
Gli effetti giroscopici della motocicletta.
zm
Effetto giroscopico
del moto di rollio:
momento
giroscopico
ym
velocità rotazione
ruota anteriore
velocità angolare di rollio
rollio verso destra
Motorcycle Dynamics
Research Group
www.dinamoto.it
Il momento giroscopico “ruota anteriore-moto di rollio” tende a ruotare il manubrio
all’interno della curva, facilitando quindi l’ingresso in curva.
7
Gli effetti giroscopici della motocicletta.
zm
velocità rotazione
ruota posteriore
momento
giroscopico
Effetto giroscopico
del moto di rollio:
velocità rotazione
motore
ym
velocità rotazione
ruota anteriore
velocità angolare di rollio
rollio verso destra
Motorcycle Dynamics
Research Group
www.dinamoto.it
Il momento giroscopico “ruote, motore- moto di rollio” tende ad imbardare il
motociclo verso destra, facilitando quindi l’ingresso in curva.
8
Gli effetti giroscopici della motocicletta.
zm
velocità rotazione
manubrio
Effetto giroscopico
del moto dello sterzo
momento
giroscopic
xm
velocità rotazione
ruota anteriore
ym
Il momento giroscopico tende a inclinare il motociclo verso
destra, aiuta quindi il moto di rollio verso destra del motociclo.
Motorcycle Dynamics
Research Group
www.dinamoto.it
guida della motocicletta: stabilita’
direzionale e inserimento in curva
Stabilita’ direzionale:
equilibrio del motociclo
in rettilineo a bassa velocità
il motociclo sta cadendo verso destra
il pilota gira lo sterzo verso destra
il motociclo incomincia a percorrere una
traiettoria circolare verso destra, si genera
una forza centrifuga
si genera una forza centrifuga che tende a
riportare il motociclo nella posizione
verticale
Motorcycle Dynamics
Research Group
www.dinamoto.it
9
10
guida della motocicletta: stabilita’
direzionale e inserimento in curva
velocità ruota
Stabilita’ direzionale:
equilibrio del motociclo
in rettilineo ad alta velocità
velocità di rollio
velocità rotazione manubrio
il motociclo sta cadendo
verso destra
forza centrifuga
il momento giroscopico “ruota ant.-rollio”
gira lo sterzo verso destra
il motociclo incomincia a percorrere una traiettoria
circolare verso destra, si genera una forza centrifuga
la forza centrifuga tende a riportare il motociclo nella posizione
.........
........
Motorcycle Dynamics
Research Group
www.dinamoto.it
11
guida della motocicletta: stabilita’
direzionale e inserimento in curva
Inserimento in curva
Fase iniziale di controsterzo
sterzata verso destra
forza laterale verso destra
curva verso destra
moto di imbardata verso destra
sterzata verso sinistra
forza laterale verso sinistra
curva verso sinistra
moto di imbardata verso sinistra
60
20
40
80
rollio verso destra
100
120
traiettoria
“push right to go left”
spingi verso destra per andare a sinistra
Motorcycle Dynamics
Research Group
www.dinamoto.it
-20
12
guida della motocicletta: stabilita’
direzionale e inserimento in curva
A
Inserimento in curva
B
C
0
“push LEFT to go RIGHT”
-40
C
0
A
20
0.02
40
velocità rollio [rad/s]
40
0.04
B
0
rollio [rad]
www.dinamoto.it
0
A
60
0.4
0.2
0.8
0.4
80
B
0
Motorcycle Dynamics
Research Group
C
0
C
20
40
60 -4
-2
A
0.4
0
2
0.8
4
-2
0
2
4
tempo [s]
6
8
destra
B
0
destra
-0.02
destra
Coppia Nm]
20
-20
velocità imbardata [rad/s] angolo sterzo [rad]
-0.04
80
10
13
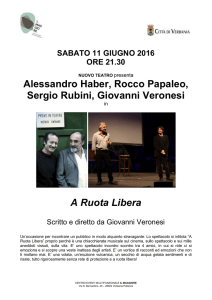
guida della motocicletta: stabilita’
direzionale e inserimento in curva
Durante la guida lungo una traiettoria
circolare, con velocità costante, il pilota
controlla il veicolo applicando una
coppia al manubrio.
Sensazione di
maneggevolezza
positive torque
Se il valore della coppia applicata è
piccolo il pilota avverte la motocicletta
come “maneggevole”.
La coppia dovrebbe essere piccola e
semmai di valore negativo.
negative torque
Rc
C
Coppia positiva: capsize instabile
Coppia negativa: capsize stabile
Senza il controllo del pilota l’angolo di sterzo diminuisce e il
veicolo cade.
Senza il controllo del pilota il veicolo, dopo alcuni
serpeggiamenti, tende a seguire una traiettoria rettilinea.
Rc
Rc
C
C
Motorcycle Dynamics
Research Group
www.dinamoto.it
14
guida della motocicletta: stabilita’
direzionale e inserimento in curva
La coppia applicata allo sterzo
2
steering torque / lateral laterale
acceleration [Ns ]
Coppia/accelerazione
Influenza dello spostamento laterale del pilota
Supponiamo che la coppia
applicata sia negativa (il manubrio
viene sostenuto).
Lo spostamento verso l’interno del
pilota diminuisce il valore della
coppia negativa.
Motorcycle Dynamics
Research Group
www.dinamoto.it
pilota spostato
200 mBaricentro
= turning radius
2
all’interno
5 cm.
0.05
m driverdilateral
displacement
100
1 50
0
200m
100
50
25
25
-1
-2
noPilota
lateralin
displacement
posizione
simmetrica
-3
-4
5
10
15
20
25
velocity [m/s]
[m/s]
Velocità
30
35
•La Stabilita’ della motocicletta: modi di vibrare
MODI DI VIBRARE
capsize, caduta laterale del motociclo
wobble, oscillazione dell’avantreno attorno
all’asse dello sterzo
weave, oscillazione laterale, di rollio e di
imbardata di tutta la motocicletta
Motorcycle Dynamics
Research Group
www.dinamoto.it
15
•La Stabilita’ della motocicletta: modi di vibrare
MODI DEGLI PNEUMATICI
Modo della massa non sospesa anteriore
Frequenza (10-20 Hz)
Motorcycle Dynamics
Research Group
www.dinamoto.it
Modo della massa non sospesa posteriore
Frequenza (10-20 Hz)
16
•La Stabilita’ della motocicletta: modi di vibrare
MODI DELLE SOSPENSIONI
Scuotimento verticale
Frequenza (2-5 Hz)
Smorzamento elevato (0.3-0.8)
Beccheggio
Frequenza (2-5 Hz)
Smorzamento elevato (0.5-1)
Il modo di beccheggio ha frequenza superiore del modo di scuotimento verticale
Motorcycle Dynamics
Research Group
www.dinamoto.it
17
•La Stabilita’ della motocicletta: modi di vibrare
MODO “WOBBLE” O “SHIMMY” della ruota anteriore
root-loci (speed = 3..60 m/s)
80
0.4
0.3
= 0.1
0.2
12
WOBBLE
70
10
60
8
40
30
6
frequency [Hz]
50
UNSTABLE
imaginary [rad/s]
= 0.5
4
20
2
10
0
-35
-30
-25
-20
-15
-10
real [rad/s]
Motorcycle Dynamics
Research Group
www.dinamoto.it
-5
0
5
0
Frequenza (5-10 Hz)
Può essere instabile alle alte velocità
18
•La Stabilita’ della motocicletta: modi di vibrare
MODO “WEAVE”
root-loci (speed = 3..60 m/s)
80
0.4
0.3
= 0.1
0.2
12
WEAVE
70
10
60
8
40
30
6
frequency [Hz]
50
UNSTABLE
imaginary [rad/s]
= 0.5
4
20
2
10
0
-35
-30
-25
-20
-15
-10
real [rad/s]
Motorcycle Dynamics
Research Group
www.dinamoto.it
-5
0
5
0
Frequenza (1-4 Hz)
Instabile alle basse velocità, può essere
instabile alle alte velocità
19
•La Stabilita’ della motocicletta: modi di vibrare
Motorcycle Dynamics
Research Group
www.dinamoto.it
20
•La Stabilita’ della motocicletta: modi di vibrare
INFLUENZA DELLE FLESSIBILITA’ SUI MODI “WOOBLE e WEAVE”
deformazione flessionale
deformazione flessionale
deformazione torsionale
Motorcycle Dynamics
Research Group
www.dinamoto.it
21
22
•La Stabilita’ della motocicletta: modi di vibrare
deformazione flessionale
INFLUENZA DELLA FLESSIBILITA’ DELLA FORCELLA SUL
MODO “WOOBLE”
10
a)
b)
wobble real part [1/s]
wobble frequency [Hz]
9
8
7
6
5
0
no bending
53 kNm/rad
33 kNm/rad
23 kNm/rad
10
20
speed [m/s]
30
40
UNSTABLE
5
0
-5
-10
0
STABLE
10
20
30
40
speed [m/s]
La flessibilità della forcella riduce la stabilità e la frequenza a
velocità medio-bassa.
Motorcycle Dynamics
Research Group
www.dinamoto.it
23
•La Stabilita’ della motocicletta: modi di vibrare
INFLUENZA DELLA FLESSIBILITA’ DELLA FORCELLA SUL MODO “WOOBLE”
10
flexible fork without
gyroscopic effects
B
real part [1/s]
5
A
bending axis
0
wheel
spin
C
-5
rigid
-10
bending
speed
flexible fork with
gyroscopic efffects
K=23 kNm/rad
0
10
20
30
40
gyroscopic
moment
speed [m/s]
La flessibilità riduce la stabilità.
L’effetto giroscopico “ruota anteriore-rotazione forcella” aumenta la stabilità.
Motorcycle Dynamics
Research Group
www.dinamoto.it
24
•La Stabilita’ della motocicletta: modi di vibrare
INFLUENZA DELLA FLESSIBILITA’ DELLA FORCELLA
SUL MODO “WOOBLE”
CONFRONTO NUMERICO-SPERIMENTALE
0.1
a)
b)
7
experiments
rigid model
mobile rider &
flexible fork :
k=30 kNm/rad
k=40 kNm/rad
6
5
0
10
20
speed [m/s]
Motorcycle Dynamics
Research Group
www.dinamoto.it
UNSTABLE
0.05
8
damping ratio
frequency [Hz]
9
deformazione flessionale
30
0
-0.05
40
-0.1
0
STABLE
10
20
speed [m/s]
30
40
25
•La Stabilita’ della motocicletta: modi di vibrare
deformazione flessionale
INFLUENZA DELLA FLESSIBILITÀ TORSIONALE
DEL TELAIO-FORCELLONE POSTERIORE
SUL MODO “WEAVE”.
deformazione torsionale
10
b)
3
weave real part [1/s]
weave frequency [Hz]
a)
2
1
no torsion
7.5 kNm/rad
3.0 kNm/rad
1.5 kNm/rad
0
0
10
20
speed [m/s]
30
40
UNSTABLE
5
0
-5
-10
0
STABLE
10
20
30
speed [m/s]
La flessibilità torsionale riduce la stabilità.
La flessibilità torsionale riduce la frequenza alle velocità medio-alte.
Motorcycle Dynamics
Research Group
www.dinamoto.it
40
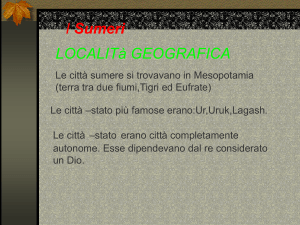
•La Stabilita’ della motocicletta: modi di vibrare
26
INFLUENZA DELLA FLESSIBILITA’ TORSIONALE SUL MODO “WEAVE”
10
UNSTABLE
deformazione flessionale
RE k=1e8
kNm/rad
real part [1/s]
5
RE k=3.0 NO GYR
RE k=3.0
B
0
flexible swingarm
C
A
-5
rigid swingarm
-10
0
10
20
30
40
deformazione torsionale
speed [m/s]
La flessibilità torsionale riduce la stabilità.
L’effetto giroscopico “ruota posteriore-rotazione forcella” aumenta lievemente la stabilità.
Motorcycle Dynamics
Research Group
www.dinamoto.it
27
•La Stabilita’ della motocicletta: modi di vibrare
INFLUENZA DELLA MOBILITA’ DEL PILOTA SUI MODI “WEAVE” e “WOOBLE”
WOBBLE
25
8
7
6
fixed rider
suspended rider
5
0
10
20
30
40
speed [m/s]
20
fixed rider
mobile rider
3
15
10
2
1
5
V = 40 m/s
0
-10
weave frequency [Hz]
weave imaginary part [rad/s]
a)
UNSTABLE
9
wobble frequency [Hz]
WEAVE
V = 1 m/s
-5
0
weave real part[1/s]
50
10
wobble real part [1/s]
b)
UNSTABLE
5
0
La mobilità del pilota incrementa la
stabilità sia del Weave che del Wobble
-5
-10
0
Motorcycle Dynamics
Research Group
www.dinamoto.it
STABLE
10
20
speed [m/s]
30
40
Attorno a quale asse ruota la motocicletta
durante l’inserimento in curva?
Caso particolare: solo moto di rollio (traiettoria rettilinea)
angolo di rollio
asse di Mozzi
angolo di Mozzi= 0°
velocità V
.
velocità angolare
traiettoria rettilinea
•The Mozzi axis is horizontal and passes through the contact points
•The motion of the motorcycle is a rotation about and a translation along the Mozzi axis
Motorcycle Dynamics
Research Group
www.dinamoto.it
28
29
Attorno a quale asse ruota la motocicletta
durante l’inserimento in curva?
Caso particolare: solo moto di imbardata (traiettoria circolare)
angolo di rollio costante
traiettoria circolare
V
velocità V
asse di Mozzi
zs
T = centro di curvatura
.
angolo di Mozzi= 90°
.
velocità angolare
Motorcycle Dynamics
Research Group
www.dinamoto.it
•The Mozzi axis is vertical and passes through the turn centre
•The motion of the motorcycle is a rotation about the Mozzi axis
30
Attorno a quale asse ruota la motocicletta
durante l’inserimento in curva?
Caso generale
angolo di rollio
traccia della traiettoria
dell'asse di Mozzi
velocità V
.
velocità angolare di imbardata
velocità angolare di rollio
= angolo di Mozzi
.
asse di Mozzi
T = centro di curvatura
Motorcycle Dynamics
Research Group
www.dinamoto.it
traiettoria del centro di curvatura
Attorno a quale asse ruota la motocicletta
durante l’inserimento in curva?
Entrata lenta in curva
31
Traccia asse di Mozzi
traiettoria
Centro di
curvatura
Motorcycle Dynamics
Research Group
www.dinamoto.it
Attorno a quale asse ruota la motocicletta
durante l’inserimento in curva?
32
Entrata veloce in curva
Traccia asse di Mozzi
traiettoria
Centro di
curvatura
Motorcycle Dynamics
Research Group
www.dinamoto.it
33
Attorno a quale asse ruota la motocicletta
durante l’inserimento in curva?
Entrata in curva, pista di Adria: RSV 1000 Aprilia
-120
0
0
30
1
2
3
4
5
6
7
8
9
10
11 12
30
1
2
3
4
5
6
7
8
9
10
sinistra
imbardata verso destra
destra
0
-30
vel. imbardata[°/s]
-30
imbardata verso destra
vel. rollio [°/s]
Mozzi angle [°]
120
11 12
60
50
traiettoria
40
12
11
10
9
8
7
6
5
4
30
traccia a sinistra: manovra di controsterzo
20
10
3
traccia dell'asse di Mozzi
2
Motorcycle Dynamics
Research Group
www.dinamoto.it
0
9
11 10
10
centro di curvatura
11
6
7
5
4
8
7
3
2
1
-60
-40
-20
0
20
40
60
34
Attorno a quale asse ruota la motocicletta
durante una manovra di slalom?
Slalom, passo =14 m
Centro di
curvatura
Traccia asse di Mozzi
traiettoria
Traccia asse di Mozzi
Centro di
curvatura
Motorcycle Dynamics
Research Group
www.dinamoto.it
35
La fisica e la motocicletta
Fina parte 1°
Motorcycle Dynamics
Research Group
www.dinamoto.it