Si assimila un corpo fisico di massa m ad un punto materiale P :
3 gradi di liberta’ (posizione, non c’e’ rotazione)
La forza e’ un vettore F, principio di sovrapposizione = SFi e’ ancora una forza F
Lo stato di moto e’ definito noti i vettori R e V ( V=dR/dt) oppure q = mv = m dR/dt
R e V dipendono dal sistema di riferimento scelto, che e’ arbitrario.
Un riferimento e’ inerziale se , in assenza di forze q= cost (e viceversa)
In un sistema inerziale la variazione di q in presenza di forze e’ in dipendente dal
Riferimento
dq= F dt
F=dq/dt
La forza e’ sempre la manifestazione di una interazione
In una interazione
F12 + F21= 0
in un sistema isolato S Fi = 0
Sono relazioni vettoriali F = dq/dt
significa la simultanea validita’
di
Fx = dqx/dt Fy=dqy/dt Fz= dqz/dt
q=cost qx = costx qy= costy etc
Se il corpo e’ esteso (o si hanno piu’ corpi) quanto sopra si applica al Centro di Massa
Il centro di massa si comporta come un punto materiale dotato di tutta la massa del
sistema e a cui sia applicata la somma delle forze esterne applicate al corpo.
Una forza applicata al punto P puo’ avere un momento M rispetto a un punto O
M = OP X F = d/dt (OPXq) = dLo/dt
Lo = momento della quantita’ di moto
Quanto si applica ad F e q si applica a M ed Lo.
M=dLo/dt
etc
Questi sono postulati. Essi riflettono fatti sperimentali.
La materia si comporta cosi’. La velocita’ areale e’ costante perche’ L=cost
Isolato: comprende tutte le parti interagenti
CONSEGUENZE:
Se f (o Sf) agisce per un tempo dt (impulso) dI= fdt = dt dq/dt = dq
L’impulso e’ un vettore
∫fdt= q2-q1
Se f (o Sf) agisce per un tratto ds (lavoro) dL= f ∙dR = dR∙dq/dt = V∙dq =q/m∙dq = d (q2/2m)
∫F ∙ dR = Ekfin – Ekiniz
Se f agisce per un tratto ds in un tempo dt
F ∙ dr / dt = dL/dt = Fv = potenza
In alcuni casi
f ∙ dR e’ anche uguale a = - dU(x,y,z) e SfdR = -(Uf-Ui)
In questi casi
∫fdR = - (Uf –Ui) = Ekf-Eki
Uf + Ekf = Ui +Eki
Questo principio si chiama “conservazione dell’energia meccanica”.
Una forza per la quale si possa definire una U si chiama Forza conservativa
Una forza e’ conservativa se ∫ f ∙ dr = 0 lungo qualsiasi cammino chiuso.
Microscopicamente tutte le forze di natura (elastica, peso/gravita’,elettricita’ etc)
hanno questa proprieta’. Macroscopicamente possono presentare effetti dissipativi.
Il lavoro di una forza di attrito e’ sempre contraria al moto . (La forza di attrito e’
fondamentale per la stabilita’di strutture composte, pensare alla vite)
In presenza di forze dissipative l’energia meccanica NON si conserva. Un freno dissipa
l’energia cinetica di una bicicletta e il suo lavoro e’ uguale all’energia dissipata.
Questo vale per un punto materiale o per il centro di massa di un sistema esteso che non
abbia moto intorno al CdM . Se il sistema ha possibilita’ di muoversi intorno al CdM
l’energia si ripartisce tra i gradi di liberta’ del moto del CdM e quelli del moto relativo al
CdM.
L’energia cinetica posseduta da una ruota
E = 1/2m V2cdm + ½ I ω2
V e ω sono correlati Vcdm = ω R se la ruota non slitta .
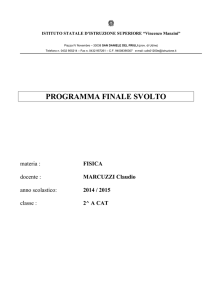
Bisogna considerare i momenti delle forze rispetto al CdM (fatto solo nel caso
statico : Archimede e la leva, ma anche caso dello sciatore )
CdM
r1
m
r2
M
r1Xmg + r2XMg =0
F = (M+m)g
F
.
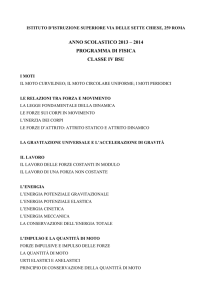
In assenza di attrito la ruota scivola La accelerazione a e’ definita
z
p
a
P
P’
da p= Ma. e la velocita’ finale e’ fissata dalla
conservazione dell’energia mecc. mgh + 0 = 0 + 1/2 Mv2
Se c’e attrito la ruota puo’ rotolare senza strisciare.
Le forze attive sono l’attrito a ,diretto lungo –X, e il peso p lungo +x.
La forza risultante e’ p-a = M acm , quindi il centro di massa ha una
accelerazione minore rispetto al caso in assenza di attrito.
La velocita’ di P rispetto al piano e’ nulla (il pneumatico lascia
un’impronta, come il piede di uno che corre). Quindi il punto P a cui il
piano applica a non si sposta(ds=0) : il lavoro dell’attrito e’ nullo, p e’
conservativo e il suo lavoro e’ mgh = variazione di energia cinetica
La stessa del caso in assenza di attrito ma l’accelerazione del cm
e’ minore e quindi minore la sua velocita’ finale, una
parte di energia cinetica e’ andata nel moto rotatorio
intorno al cm.
Nel tempo dt il punto di contatto e’ P’ e il cdm ha percorso il tratto ds = R dθ con una velocita’ v =
ds/dt = R dθ/dt = R ω. La velocita’ di dm e’ Vdm = Vcm + Vtang
La sua Ecin = ½ dm (V2cm + V2tang + 2 Vcm∙ Vtang)
E tot = somma su tutti i dm
Etot= ½ MV2cm + ½ MV2tang + Vcm∙ Σdm Vtang
ma ΣdmVtang= 0
2
2
Poiche’ Vtang = R ω
Etot = ½ MV cm + ½ MR ω2 = Mgh
½ MV2cm < Mgh
MR2 e’ il momento di inerzia I del pneumatico . Se il corpo fosse una sfera piena I = 2/5 MR2
FORZE CONSIDERATE:
Peso : forza conservativa
Molla e elastico : forza conservativa
tensione: forza interna,statica
attrito :forza dissipativa
NB: l’attrito non genera mai moto , ma vi si oppone
Casi considerati : funi e sospensioni , la fune trasmette una forza eguale alla sua
tensione. E’ un vincolo inestensibile che si oppone ad aumenti di distanza
(soffitto corpo, oppure corpo-corpo). Questo ruolo puo’ essere svolto anche da una
sbarra rigida, che si oppone a variazioni di distanza.
La fune e’ capace di sole “tensioni”, la sbarra puo’ essere “compressa”.
T
M
T
T
C
M
T
M
M
T
L’attrito si manifesta tra un corpo e un vincolo su cui il corpo “striscia” . Il vincolo puo’
essere una guida orizzontale o inclinata , ma anche curva, che impedisce movimenti
del corpo ad essa perpendicolari, in uno o entrambi i versi. La forza d’attrito e’ sempre
proporzionale alla intensita’ della forza esplicata dal vincolo nella direzione
ad esso perpendicolare (reazione normale) ed agisce tangenzialmente.
Quando l’impedimento al moto non viene da un vincolo , ma dall’aria ,o dall’acqua
si parla di “resistenza” al moto.
+F
O
P
-F
Fa
X
Y
θ
X
Un motore applica alla ruota un momento M
Schematizzato dalla coppia + F e –F .
La ruota esercita al suolo la forza - F .
Se F < Fa max
con Fa max = μs M g
-F+Fa =0 nel punto P, e P e’ fermo rispetto al suolo.
-La risultante delle forze e’ –F+Fa +F = +F
la ruota avanza sotto l’azione di F applicata al
suo cm. F= Macm
Se F > μs M g la ruota slitta, il punto P si muove
rispetto al suolo e μs diventa μd < μs cioe’ Fa
diventa F’a =μdMg < F
-F+F’a = - F”
+F – F”< F e la ruota avanza piu’ lentamente.
Il vincolo puo’ reagire lungo due direzioni : una normale
e una parallela al piano inclinato. Quella normale e’
Rn = mg cosθ quella parallela e’ l’attrito e vale al max.
Rp =μs Rn
Se non c’e’ attrito Rp= 0
Il problema tipico e’ trovare la legge del moto in presenza di una forza R (t) ===
Questo richiede l’integrazione della funzione vettoriale
F = m d2R/dt2
Cioe’ delle tre equazioni scalari Fx =
Fy=
Fz=
Semplice se la direzione di F e’ costante (es peso,attrito su un piano),l’equazione
vettoriale si puo’ semplificare molto assumendo un asse del riferimento parallelo a F.
y
Su m agisce F= mg = cost
Fx = 0
qx = cost vx = cost =vox x = vox t
Fy = - mg = dqy/dt
y = yo +voy t – ½ gt2
x
Quando y = y max vy=0
L = -mgymax = ½ m v2f – 1/2mvoy2
Ma la forza e’ anche conservativa
L = -mgymax = ½ m v2f – 1/2mvoy2 L = - (U(ymax) –U(0)) = - mgymax
E la vy con la quale tocca il suolo = v0y perche’ U = -mgy e y finale =y iniziale
La cosa e’ ancora piu’ semplice se il moto e’ lungo una retta .
Nel caso di un moto piano si possono considerare due esempi : moto di un grave
lanciato (parabola o simile se si tiene conto della resistenza dell’aria) o moto
“centrale” in cui la forza risultante agente non ha direzione costante ma ha una
componente che punta sempre ad un punto P (pianeti [sola gravita’] ,
pendolo [g + tensione fune]……..)
In questo caso la velocita’ varia in direzione o in direzione e modulo.
L’accelerazione ( cioe’ dq/dt) ha cioe’ due componenti una normale alla traiettoria
che provoca il solo il cambiamento di direzione e che ha intensita’ a’= v2/r dove
v il modulo istanteneo della Velocita’ e r il raggio locale di curvatura, ed una a”
Tangente alla curva a” = dv/dt dove v e’ il modulo della velocita’.
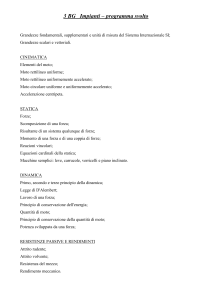
ω = costante
o
Piano orizzontale
Tfune = cost = M ω2 R = Mv2/R
Se si accorcia lentamente la fune tirandola
attraverso il foro :la tensione ha momento nullo
rispetto a O. Lo= cost = RXMv = MvR =Mv’r
v’/v = R/r T’ =Mv’2r = Mv2 R2/r
Lavoro = Ecin f – Ecin i
fune
C
sbarra
Piano verticale
o
A
B
Tsbarra (A) – mg = M ω2 R
Ts (B) = M ω2 R
Ts(C) + mg = M ω2 R