Note Tavola 1.
Se si considera un sistema di assi cartesiano tridimensionale S=(0,x,y,x), un suo punto può
essere proiettato su una retta o su un piano. Le proiezioni ortogonali sugli assi principali
danno i valori delle coordinate, mentre le proiezioni ortogonali sui piani principali danno i
valori di due coordinate.
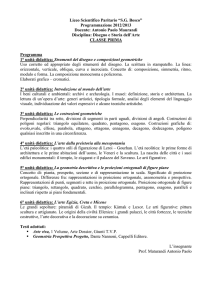
Se si effettuano le tre proiezioni sui tre piani principali, per poterle rappresentare su un unico
foglio è necessario assumere che il foglio di disegno coincida con un piano principale, e far
ruotare i due restanti piani attorno a degli assi principali in modo da renderli complanari con il
foglio di disegno. Se si divide il foglio di disegno in quattro quadranti, e un quadrante lo
facciamo coincidere con un piano di riferimento, con rotazioni di 90° dei due restanti piani,
questi si andranno a posizionare su altri due quadranti, così da evitare sovrapposizioni. Ad
esempio, se il piano di riferimento xy lo facciamo coincidere con il I quadrante, il piano yz
con una rotazione di 90° attorno all’asse y si posizionerà sul II quadrante , analogamente, il
piano zx con una rotazione di 90° attorno all’asse x si posizionerà sul IV quadrante del foglio.
Le linee che delimitano il III quadrante rappresentano l’asse z, e tale quadrante può essere
utilizzato per riportare la coordinata z dal II al IV quadrante o viceversa.
y
y
II
P
(x,y)
I
x
z
(y,z)
x
z
III
(z,x)
IV
z
Ovviamente sono possibili differenti disposizioni delle proiezioni sui quadranti.
In generale, sono sufficienti solo due proiezioni per descrivere la geometria tridimensionale di
un oggetto, per cui una terza proiezione è dipendente dalle altre due. Infatti, G. Monge1
(1746-1818) propose solo due proiezioni ortogonali per rappresentare un oggetto, perché una
terza proiezione poteva sempre essere ottenuta dalla prime due.
In alcune applicazioni (come nel Reverse Engineering) occorre ricostruire un modello CAD
tridimensionale di un oggetto; se si dispongono solo di disegni, ne consegue che la
ricostruzione è possibile se si hanno almeno due sue proiezioni, mentre se l’oggetto è un
prodotto reale occorre acquisire almeno due immagini della parte da ricostruire come modello
CAD.
Nella Figura seguente sono riportate le proiezioni ortogonali di un tetraedro non regolare.
1
Gaspard Monge, pur proveniente da una famiglia povera, fu ammesso a seguire alcuni corsi presso l’École
Militare di Mézière, e successivamente ad insegnarvi la matematica. Durante la rivoluzione francese si impegnò
per la costituzione di una scuola pubblica, in cui si dovevano formare gli ingegneri. Da tale impegno scaturì nel
1794 la nascita dell’École Polytechnique, che ebbe tra i suoi primi docenti , oltre a Monge, i matematici
Lagrange, Legendre e Laplace. Nello stesso anno (1794) si costituì anche École Normale, a cui si accedeva con
criteri di selezione meno rigorosi dell’École Polytechnique. Le lezioni tenute da Monge, nell’a.a. 1794-95,
all’École Normale furono pubblicate col titolo Géométrie descriptive, in cui venivano descritte costruzioni
grafiche che si basavano su due proiezioni ortogonali.
1
y
P4
P4
P1
P1
P2
P2
P3
P3
z
x
P2
P1
P3
z
P4
Fig. 1: Proiezioni ortogonali di un tetraedro
1. Lunghezza reale di uno spigolo date due proiezioni
Se per semplicità consideriamo come piani di proiezione i piani principali di un sistema di
assi cartesiani, e se abbiamo le proiezioni sui piani xy e yz di un punto generico punto
P=(x,y,z), si ha che la sua posizione nello spazio è ben definita, perché conosciamo le sue tre
coordinate.
Se invece di un punto abbiamo la proiezione ortogonale di un segmento, la sua lunghezza sarà
uguale al segmento reale proiettato solo se quest’ultimo è parallelo al piano di proiezione. In
generale in una proiezione ortogonale, la lunghezza del segmento immagine è minore o
uguale alla lunghezza del segmento proiettato, mentre se la proiezione è obliqua l’immagine
può essere anche maggiore del segmento proiettato.
Se conosciamo due proiezioni ortogonali di un segmento su due piani perpendicolari è
possibile determinare graficamente la lunghezza effettiva del segmento proiettato.
La costruzione grafica si basa sul teorema di Pitagora.
Siano P1=(x1,y1,z1) e P2=(x2,y2,z2) le coordinate degli estremi del segmento, la sua lunghezza
è data da
L12 x 2 y 2 z 2
(1)
Siano xy e yz i due piani di proiezione. Le immagini dei punti P1 e P2 sul piano xy avranno,
rispettivamente, coordinate (x1,y1) e (x2,y2) e la lunghezza dell’immagine è data da
Lxy x 2 y 2
Analogamente, le proiezioni ortogonali dei punti P1 e P2 sul piano yz avranno,
rispettivamente, coordinate (y1,z1) e (y2,z2) e la lunghezza del segmento immagine è data da
Lyz y 2 z
2
Nella costruzione grafica, se si parte dall’immagine sul piano xy, si osserva che per avere la
lunghezza effettiva (1) occorre utilizzare anche l’immagine sul piano yz, ma solo per avere
informazioni sulla z. Pertanto, se si costruisce un triangolo rettangolo i cui cateti sono uguali
all’immagine sul piano xy e a (z2-z1), si ha che l’ipotenusa di tale triangolo è uguale alla
lunghezza effettiva (1) del segmento proiettato.
In Fig. 2 sono riportate due proiezioni ortogonali di un segmento P1P2 , sul I quadrante si è
costruito il triangolo rettangolo P1FP, dove P1F è la lunghezza dell’immagine sul piano xy e
PF è uguale a Δz. Il segmento P1P misura, in Scala, la lunghezza reale del segmento P1P2.
P2
z
P1
P
F
y
H
P1
x
P2
Fig. 2 : Determinazione grafica lunghezza reale segmento P 1P2.
Descrizione metodo: Si ruoti la proiezione sul piano xy in modo da avere il segmento
orizzontale P1H=P1P2. Si tracci la verticale per H e sul piano yz le orizzontali per P1 e P2, il
loro punti di intersezione F e P formeranno con P1 un triangolo rettangolo, dove per
costruzione P1F=P1H e PF è la differenza delle coordinate z. Pertanto la lunghezza
dell’ipotenusa P1P misura (in Scala) la lunghezza reale del segmento P1P2.
2 Costruzione di un triangolo e calcolo grafico/analitico della sua area.
Se sono assegnate tre segmenti, tali che la somma di due qualsiasi è inferiore al terzo,
si ha che esiste un unico triangolo che ha per lati tali segmenti.
Per costruire graficamente tale triangolo, si disegni uno dei tre segmenti e dalle due
sue estremità si traccino due cerchi aventi , rispettivamente, raggio uguali agli altri due
segmenti. L’intersezione tra i due cerchi determina due punti, situati simmetricamente
rispetto al segmento disegnato. Si prenda uno qualsiasi di tali punti, che insieme ai due punti
estremi del segmento disegnato, saranno i vertici del triangolo.
Per il calcolo grafico dell’area del triangolo si misuri un lato e la sua corrispondente
altezza, e applicare la ben nota formula (bxh/2). Per disegnare l’altezza si deve tracciare una
retta perpendicolare ad una data e passante per un assegnato punto, nel nostro caso il punto è
il vertice del triangolo opposto alla base.
L’area del triangolo avente per vertici P1=(x1,y1,z1), P2=(x2,y2,z2), e P3=(x3,y3,z3) è
uguale al semiprodotto di una sua base per la relativa altezza. Se H è la proiezione ortogonale
di P3 su P1P2 , il vettore P3H rappresenta un’altezza del triangolo, per cui si ha
3
Ar
1
1
1
P1 P2 P3 H P1 P2 P1 P3 sin P1 P2 P1 P3
2
2
2
E' preferibile associare all'area del triangolo un vettore area ottenuto dal precedente
prodotto vettoriale, per cui la sua direzione risulta perpendicolare al piano del triangolo
mentre il suo modulo è uguale all'area
i
j
k
1
1
1 y y1 z 2 z1
A r P1 P2 P1 P3 x 2 x1 y 2 y1 z 2 z1 i 2
2
2
2 y 3 y1 z 3 z1
x3 x1 y 3 y1 z 3 z1
(2)
1 z 2 z1
j
2 z 3 z1
x 2 x1
1 x x1
k 2
x3 x1 2 x3 x1
y 2 y1
y 3 y1
i Ar ,i j Ar , j k Ar ,k
dove Ar,i , Ar,j Ar,k sono le componenti del vettore area del triangolo.
Il quadrato del modulo del vettore area risulta essere uguale a
A r Ar2,i Ar2, j Ar2,k
2
(3)
La (3) può essere considerata come la generalizzazione del teorema di Pitagora
applicato ad una generica figura piana. Infatti, è sempre possibile mediante triangolazioni
avere una partizione della figura piana costituita dall'unione di triangoli complanari, per cui
considerando le loro proiezioni si ha che la somma dei quadrati delle aree di una figura piana
su tre piani perpendicolari è uguale al quadrato dell'area della figura2.
Se i vertici del triangolo appartengono tutti al piano xy , l'unica componente diversa da zero è
la k per cui la (2) si semplifica nella seguente formula, che fu proposta da Lagrange (17361813)
x1 y1 1
1 x2 x1 y 2 y1 1
Ar Ar ,k
x2 y 2 1
2 x3 x1 y3 y1 2
x3 y 3 1
2
In una memoria di G. Monge e J.-N.-Pierre Hachette (1769-1834), pubblicata nel 1802 sul Journal dell’École
Polytechnique, veniva data all’inizio della memoria una dimostrazione della (2).
4
3 Rapporti di proiezione
Si consideri un generico vettore r1 in uno spazio (0;x,y,z) e una retta il cui versore è u2.
Il prodotto scalare tra i due precedenti vettori permette di calcolare la proiezione ortogonale
del vettore r1 su u2.
(a)
r1 u 2 r1 cos
u2
r1
Fig. 1.3: Proiezione ortogonale di un vettore su una retta orientata u2 .
Mentre, la proiezione ortogonale di un vettore V su un piano, il cui versore normale è n, si
può calcolare osservando che il prodotto scalare V.n da la proiezione di V lungo n e tale
proiezione forma con V un triangolo rettangolo, dove l’altro cateto è la proiezione di V sul
piano. Pertanto, applicando il teorema di Pitagora si ha
V ' V V n
2
2
dove V’ è l’immagine o proiezione ortogonale di V sul piano di normale n.
E' possibile definire come rapporto di riduzione o fattore di riduzione il rapporto tra i
moduli del vettore immagine e il vettore proiettato. Il modulo del vettore immagine si ottiene
dal prodotto vettoriale tra V ed n, per cui il rapporto di riduzione in una proiezione ortogonale
è dato da:
Vxn
2
mv ,n
v n 1 v n
(4)
V
dove v è il versore di V.
Il rapporto di proiezione in una proiezione ortogonale è compreso nell'intervallo [0,1], esso è
uguale a zero se V ed n sono paralleli, mentre è uguale a l se V e n sono perpendicolari, in
quest'ultima condizione l'entità geometrica non subisce nessuna riduzione quando viene
proiettata.
La precedente equazione può essere utile per risolvere il problema inverso, cioè
assegnati dei rapporti di proiezione determinare il piano di proiezione, che è individuato dal
suo versore normale. Il problema ammette infinite soluzioni se si assegna un solo rapporto di
proiezione, perché abbiamo un sistema di due equazioni con le tre incognite n=(nx,ny,nz). Le
due equazioni sono date dal rapporto di riduzione e l’altra è l'equazione quadratica che lega le
componenti di un versore. Per determinare uno o più piani di proiezione occorre assegnare il
rapporto di proiezione di un altro vettore v2 non parallelo al primo v1, così avremo un sistema
nonlineare di tre equazioni di secondo grado in tre incognite
5
m 2v1,n 1 v1 n
2
m 2v 2 ,n 1 v 2 n
2
(4)
1 nx2 n y2 nz2
La formula del rapporto di proiezione si semplifica se al posto del generico versore v
consideriamo i versori principali del sistema di riferimento: i=(1,0,0), j =(0,1,0) e k=(0,0,1).
Pertanto, la (4) applicata ai versori principali diventa
mi ,n ixn nz j n y k 1 nx2
m j ,n 1 n y2
(5)
mk ,n 1 nz2
Le equazioni della (5) non sono tra di loro indipendenti, infatti la somma dei loro
quadrati è
(6)
mi2,n m2j ,n mk2,n 2
pertanto, è possibile assegnare i rapporti di proiezione di solo due versori principali
Se si applicano le precedenti equazioni alla proiezioni ortografiche si osserva che due
versori principali hanno un rapporto di proiezione uguali ad 1 mentre il restante ha il rapporto
di poiezione uguale a zero.
La soluzione del problema inverso è semplice quando si assegnano i rapporti di
proiezione di due versori principali, perché nel sistema di equazioni (4) ogni equazione ha una
sola incognita, per cui
nx 1 mi2,n
n y 1 m 2j ,n
(7)
nz 1 mk2,n
Ad esempio, se si vuole avere mi,n=1 e mk,n=1 , risulta per la (6 ) che mj,n= 0 ed i
versori del piano di proiezione sono n=(0,1,0)= j, cioè piani di proiezione paralleli al
piano principale xz , il segno + o - indica i due sensi di proiezione rispetto al versore j.
Se si considera l'assonometria isometrica si ha che i rapporti di proiezione dei versori
principali devono essere uguali, per cui dalla (6) si ha
2
0.816
3
I versori dei piani di proiezione nell’assonometria isometrica possono essere determinati o
dalla (7) o semplicemente considerando che le componenti di n sono uguali in valore assoluto
per cui
3mn2,i 2 da cui mn,i
3
0.577
3
Si osserva che il numero delle combinazione dei segni + e - per le componenti del versore n
sono 8, pertanto le possibile assonometrie isometriche di un oggetto sono 8.
3n x2 1 da cui n x n y n z
6
Le norme UNI considerano anche le assonometrie dimetriche dove due versori
principali presentano lo stesso rapporto di riduzione, in particolare tale rapporto è posto
uguale a 0.94 da cui risulta che il terzo rapporto di riduzione deve essere uguale a 0.48.
4 Volume del tetraedro
Se si considera un tetraedro, si osserva che l'altezza relativa ad una sua base è data dal
prodotto scalare tra il versore area della base e un vettore qualsiasi associato ad uno spigolo
non appartenente alla base; pertanto se P1=(x1,y1,z1), P2=(x2,y2,z2), P3=(x3,y3,z3) e
P4=(x4,y4,z4) sono i quattro vertici del tetraedro il suo volume è dato dal triplo prodotto
scalare
x1 y1 z1 1
x2 x1 y2 y1 z2 z1
1
1
1 x2 y2 z2 1
(8)
VT P1 P2 xP1 P3 P1 P4 x3 x1 y3 y1 z3 z1
6
6
6 x3 y3 z3 1
x4 x1 y4 y1 z4 z1
x4 y4 z4 1
La precedente formula compatta fu ottenuta da Lagrange che la espose nel 1775 nel suo
lavoro Solutions analytiques de quelques problémes sur les pyramides triagulaires.
In generale, il volume di un generico prisma è dato dal prodotto scalare tra il vettore
area di una base e un vettore spigolo non appartenente alla base.
5. Il versore della normale al piano P1P2 P3 coincide con il versore del suo
vettore area.
6. Per la costruzione grafica delle tracce è necessario osservare che in una
proiezione l’immagine di una retta è una retta.
Le tracce di un piano P sono le sue tre rette di intersezione con i piani principali, pertanto la
tracce sui piano xy, yz, xz devono avere, rispettivamente, coordinate z=0, x=0, y=0.
Un piano può essere definito univocamente in differenti modi : un punto e la normale, tre
punti P1,P2,P3 , ecc.. Nel nostro esempio sono dati tre punti.
Iniziamo a disegnare la traccia sul piano xy. Si prenda a caso un lato del triangolo P1P2P3 e lo
si prolunghi e sia tale lato il segmento P2P3. Si prolunghi P2P3 sul piano yz fino a incontrare
l’asse y nel punto D, che avrà coordinata (yD,0). Il punto corrispondente a D sul piano xy sarà
A , ottenuto dall’intersezione tra la verticale per D e il prolungamento di P 2P3 sul piano xy. Il
punto A ha per costruzione coordinata zA=0 , quindi è un punto della traccia sul piano xy.
Procediamo in modo analogo col segmento P1P3 e il prolungamento della sua immagine sul
piano yz determina il punto F, a cui corrisponde il punto B sul piano xy, che è un altro punto
della traccia sul piano xy. La retta che passa per i punti A e B del piano xy è la traccia di P su
xy, due punti significativi di tale traccia sono i punti Xt e Yt, cioè i punti di intersezione della
traccia con gli assi principali.
7
z
Zt
Tracce di un piano di cui
si conoscono tre suoi punti.
P1
P1
C
P2
P2
P3
P3
x
Xt
F
D
y
E
Yt
P2
P1
P3
B
A
Xt
x
Fig. 3: Tracce di un piano dati tre suoi punti.
Per calcolare la traccia sul piano yz, si procede sempre nello stesso modo, ma ora conosco un
punto della traccia, che è il punto Yt.
Prolungo sul piano xy il segmento P2P3 fino ad ottenere il punto E, e da questo punto traccio
la verticale che incontra il prolungamento di P2P3 sul piano yz nel punto C, che è per
costruzione un punto della traccia sul piano yz. La retta che passa per Yt e C è la traccia sul
piano yz.
La traccia sul piano xz è ottenuta dalle due precedenti.
Parte Facoltativa
1. Equazione analitica del piano.
Utilizzando i vettori è possibile ottenere facilmente anche l’equazione di un piano passante
per un assegnato punto P1 ed avente normale n.
Per ogni punto P appartenente al piano, il vettore P1P è normale a n, per cui il prodotto
scalare P1P .n=0 ; poiché P1P =r- r1 , l'equazione del piano è
(r-r1).n =0 → r.n = x nx+ y ny + z nz = r1.n = p
(9)
dove lo scalare p rappresenta la distanza del piano dall’origine.
4. Angolo solido
Per il calcolo dell’angolo solido di un vertice Vk=(xk,yk,zk) di un poliedro, occorre considerare
gli spigoli che convergono nel vertice come dei vettori e fare i prodotti scalari tra i vertici che
definiscono una faccia del poliedro, in tal modo si calcolano gli angoli piani tra gli spigoli
8
che convergono nel vertice Vk. Siano r1,k=( xk-x1,yk-y1,zk-z1)=Vk-V1 e r2,k=(xk-x2,yk-y2,zk-z2)=
=Vk-V2 i primi due vettori-spigoli formato dai vertici , dal loro prodotto scalare si ha
r1,k r2,k ( xk x1 )( xk x2 ) ( yk y1 )( yk y2 ) ( zk z1 )( zk z2 ) r1,k r2,k cos 1, 2 ( 10)
dove 1,2 è l'angolo piano tra r1,k e r2,k.
Se vi sono n≥3 spigoli occorre fare n-1 prodotti scalari. La somma di tutti gli angoli piani è
uguale all’angolo solido del vertice Vk. L’angolo solido è una misura della curvatura del
poliedro, e più precisamente la differenza tra 2p e l’angolo solido. Infatti se tale differenza è
uguale a zero, si ha che tutte le facce che hanno in comune il vertice V k sono complanari e
quindi la curvatura è uguale a zero in Vk. In questo caso non esiste un angolo solido, perché si
dimostra che esso deve essere sempre minore di 2p. Si può dimostrare che la somma della
precedente differenza, su tutti i vertici di un poliedro convesso, è sempre uguale a 4p.
9