MODULO 2 – FORZE ED EQUILIBRIO
Unità 1 - Elementi di calcolo vettoriale
Nozione di vettore. Grandezze vettoriali e grandezze scalari
Le grandezze fisiche si distinguono essenzialmente in due grandi classi. Quelle che risultano completamente definite
quando se ne conosce la sola misura rientrano nella categoria delle grandezze scalari le altre richiedono di norma un
maggior contenuto informativo e vengono rappresentate dalle grandezze vettoriali.
Nella prima categoria rientrano grandezze come la lunghezza, l'area, il volume, il tempo, la temperatura, la pressione, il
calore specifico, l'energia …, e per queste è sufficiente fornire la loro grandezza relativamente ad una opportuna unità di
misura: esempi tipici delle grandezze vettoriali sono invece lo spostamento, la velocità, l'accelerazione, la forza,
l'impulso, ….
Definizioni
Un vettore nel piano (o nello spazio) è un ente geometrico caratterizzato da una direzione, un verso e un'intensità
(modulo).
Per indicare un vettore utilizziamo il simbolo u , mentre usiamo la notazione u senza freccetta per individuare il
modulo o intensità del vettore u .
Graficamente un vettore viene rappresentato da un segmento orientato.
u
A
B
r
I punti A e B si chiamano rispettivamente origine ed estremo del vettore.
Se il punto A è fisso il vettore si dice applicato in A, se invece A è un qualunque punto
della retta r, il vettore si dice applicato ad r. Se non è applicato si dice libero.
La retta r rappresenta la direzione del vettore, il segmento AB rappresenta il modulo del vettore, mentre la freccia posta
nell’estremo B rappresenta il verso del vettore.
Due vettori si dicono:
equipollenti quando hanno la stessa direzione, lo stesso verso e uguale modulo;
concordi se hanno stessa direzione e stesso verso;
discordi quando hanno stessa direzione e verso contrario;
opposti se hanno uguale intensità e sono discordi.
Operazioni con i vettori
Dati due vettori u e v possiamo definire delle operazioni tra essi in modo da associare a ciascuna coppia un altro
vettore.
Somma e differenza di vettori
Regola del triangolo. Il vettore somma (o vettore
risultante) w di due vettori u e v si determina
graficamente applicando nell'estremo di u , mediante una
traslazione, il vettore v .
Il vettore w che unisce l’origine di u con l’estremo di
v fornisce la somma w = u + v
Regola del parallelogramma. Un altro metodo consiste nella regola del
parallelogramma: il vettore risultante w = u + v è rappresentato dalla diagonale del
parallelogramma costruito per mezzo dei segmenti orientati rappresentativi dei due
vettori e disposti in modo da avere l'origine in comune.
Regola del poligono. Nel caso in cui i vettori siano numerosi si può utilizzare
la regola del poligono (metodo punta e coda). Consiste nel traslare i diversi
vettori in modo che l'origine di ognuno coincida con l'estremo del precedente.
Il vettore risultante si ottiene quindi unendo l'origine del primo con l'estremo
dell'ultimo.
1
Per determinare il vettore differenza basta sommare ad
Con il metodo punta-coda otteniamo:
u l'opposto di v : u - v = u +(- v ).
Osserviamo che per la differenza di vettori non vale la proprietà commutativa, infatti:
u - v =- ( v - u ).
Utilizzando la regola del parallelogramma si può notare che la lunghezza della diagonale uscente dall’origine comune
esprime la lunghezza di u + v mentre la lunghezza dell'altra diagonale è pari alla lunghezza del vettore u - v .
u
v
w1
v
v
w
u
v
w1
w=u +v
w1 = u - v = u +(- v )
Moltiplicazione di un vettore per uno scalare
Dato uno scalare a (numero reale) e un vettore u è possibile definire una nuova operazione tale da associare a questi
due un altro vettore.
Se moltiplichiamo un numero reale a per un vettore u otteniamo un vettore che ha come modulo il prodotto a·u, per
direzione la stessa direzione di u e come verso lo stesso di u se a>0, opposto a quello di u se a<0.
Es. a=3
Scomposizione di un vettore lungo due direzioni assegnate
Questo è il procedimento per cui dato un vettore u e due rette r e s
tra loro non parallele, è possibile trovare due vettori disposti lungo
r e s in modo che la loro somma sia u .
Per determinare i vettori componenti secondo le direzioni r e s si
conducono dall'estremo del vettore u le parallele alle rette date
fino ad ottenere i punti C e D.
AB AC AD e
concludere che i vettori AC e AD sono i vettori componenti di u secondo le due rette assegnate r e s.
In accordo alla regola del parallelogramma per la somma di vettori, possiamo dunque scrivere che
Componenti cartesiane di un vettore
Dato un sistema cartesiano ortogonale, si chiamano componenti di un vettore
proiezioni del vettore sui rispettivi assi, u x e u y . u = u x + u y
u lungo gli assi coordinati x e y le
y
uy
0
u
ux
x
2
UNITA’ 2 - LE FORZE
Le forze si dividono in due grandi categorie:
- forze di contatto: sono forze che agiscono per contatto diretto, es.: dare un calcio ad un pallone, spingere un
carrello, etc.
- forze a distanza: sono forze che agiscono senza nessun tipo di apparente di contatto, es.: forza di gravità, forza
magnetica, etc.
Un importante effetto che le forze producono è il cambiamento di velocità di un corpo. Un corpo può cambiare la sua
velocità solo se interviene una forza esterna, mentre se un corpo è fermo resta fermo finché una forza esterna non
interviene per metterlo in moto.
Definizione operativa
Una forza rappresenta una grandezza fisica vettoriale, la cui intensità è misurata con uno strumento chiamato
dinamometro.
L’unità di misura delle forze è il Newton (N) che rappresenta una unità derivata (N = kg·(m/s 2))
La forza è un vettore perché oltre all’intensità è necessario specificare anche direzione e verso.
Il dinamometro è uno strumento per la misurazione delle forze. La sua struttura è molto semplice poiché è costituito da
una molla con una scala graduata in newton. Poiché secondo la legge di Hooke, la deformazione elastica di una molla è
proporzionale alla forza applicata, una misura dell'allungamento x fornisce indirettamente una misura della forza F,
.
La sensibilità del dinamometro dipende dalla costante elastica k della molla:
con piccoli valori di k si ha un dinamometro più sensibile; se ad esempio k=10 N/m, una forza di 1 N
allungherà la molla di x= 1N/10 N/m = 0.1 m = 10 cm. Sulla scala graduata di questo dinamometro un
intervallo di un centimetro corrisponderà a una variazione di 0,1 N.
per grandi valori di k il dinamometro è invece meno sensibile; se ad esempio k=200 N/m, una forza di 1 N
allungherà la molla di x= 1N/200 N/m = 0,005 m = 5 mm. Sulla scala graduata di questo dinamometro un
intervallo di un centimetro corrisponderà a una variazione di 2 N.
Leggi di forza
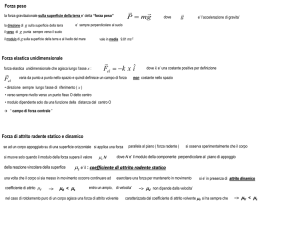
La forza peso
Sulla Terra, ogni corpo subisce una forza-peso, che è la forza di gravità con cui è attratto dalla Terra, quindi questo tipo
di forza agisce a distanza.
La forza-peso e la massa sono grandezze diverse:
- la forza-peso è un vettore, la cui intensità è misurata con il dinamometro, mentre la direzione è quella verticale
e il verso rivolto in direzione del centro della Terra.
- la massa è uno scalare ed esprime la quantità di materia di cui è costituito un corpo, si misura con una bilancia
a piatti uguali
mentre la massa non cambia mai qualsiasi parte dell’universo noi andiamo, la forza-peso invece cambia.
Come è facilmente dimostrabile, in un dato luogo, la forza-peso di un corpo è direttamente proporzionale alla sua
massa. Il fattore di proporzionalità è chiamato accelerazione di gravità e si indica con il simbolo g , tale valore cambia
da punto a punto sulla Terra, in particolare al livello del mare vale circa 9,8 N/kg
FP=g·m
Le forze di attrito
La forza d'attrito (o attrito) è una forza di contatto fra due superfici, ed è sempre diretta in senso contrario al moto. La
forza d'attrito che si manifesta tra superfici in quiete tra loro è detta di attrito statico, tra superfici in moto relativo si
parla invece di attrito dinamico.
Secondo l'interpretazione classica, esistono tre diversi tipi di attrito:
attrito radente: dovuto allo strisciamento, che avviene su superfici piane;
attrito volvente: dovuto al rotolamento, che avviene su superfici curve;
attrito viscoso: relativo a un corpo immerso in un fluido.
Si è dimostrato che l'attrito è dovuto soprattutto a fenomeni di adesione (legami chimici) tra le molecole che
compongono le superfici a contatto.
3
Le forze di attrito volvente sono in generale molto minori rispetto a quelle dovute all'attrito radente. Da ciò derivano le
applicazioni di ruote o rulli per il trasporto di oggetti pesanti che, se trascinati, richiederebbero molta più forza per
essere spostati.
Attrito radente
L’attrito radente si presenta quando ci sono due corpi a contatto che strisciano. Possiamo avere due tipi diversi di attrito
radente:
- attrito radente statico, quando il corpo non si muove, ma oppone comunque una certa resistenza ad essere
mosso, es.: quando si vuole spingere un grossa massa, come un auto, bisogna produrre un notevole sforzo
fisico per smuoverla.
- Attrito radente dinamico, si ha quando il corpo è già in moto, ma continua a opporre una certa resistenza.
Mentre l’attrito dinamico ha un valore costante che non dipende dalle condizioni di moto, l’attrito statico risulta
crescente con la forza applicata, fino ad un valore massimo oltre il quale il corpo inizia a muoversi e si passa così ad un
attrito dinamico.
kr(statico)·FP
Fa
v
Fp
kr(dinamico)·FP
F
La relazione fisica, di tipo sperimentale, che è alla base dell’attrito radente è:
Fa=kr·FP
(1)
Dalla (1) si osserva che la forza di attrito Fa è direttamente
proporzionale alla forza-peso del corpo e direttamente proporzionale ad
una costante kr chiamata coefficiente di attrito radente.
Il coefficiente d'attrito è una grandezza che non ha dimensioni fisiche
(dimensionale) e dipende dai materiali delle due superfici a contatto e
dal modo in cui sono state lavorate. Il coefficiente di attrito statico krs è
sempre maggiore o uguale al coefficiente d'attrito dinamico krd per le
medesime superfici. Dal punto di vista microscopico, esso è dovuto alle
forze di interazione tra gli atomi dei materiali a contatto.
La forza di attrito definita dall'eq. (1) rappresenta la forza di attrito
massima che si manifesta nel contatto tra due superfici. Se la forza
motrice F è minore di krs·Fp, allora l'attrito è pari a F e il corpo non si
muove; se F supera krs·Fp, il corpo inizia a muoversi; per valori di F
ancora maggiori, l'attrito (dinamico) è sempre costante e pari a krd ·Fp.
Dalla (1) si evidenzia che la forza di attrito in nessuna maniera dipende
dalla superficie di contatto.
Alcuni valori del coefficiente di attrito radente.
Superfici
krs (statico) krd (dinamico)
Legno - Legno
0.5
0.3
Acciaio - Acciaio
0.78
0.42
Acciaio - Acciaio lubrificato 0.11
0.05
Acciaio - Teflon
0.04
0.04
Acciaio - Ghiaccio
0.027
0.014
Acciaio - Aria
0.001
0.001
Gomma - asfalto (asciutto)
1.0
0.8
Gomma - asfalto (bagnato)
0.7
0.6
Vetro - Vetro
0.9 - 1.0
0.4
Legno Sciolinato - Neve
0.1
0.05
Attrito volvente
L'attrito volvente si presenta quando un corpo cilindrico o una ruota rotola senza strisciare su una determinata
superficie. Il rotolamento è reso possibile dalla presenza di attrito radente tra la ruota e il terreno; se questo attrito non ci
fosse, o fosse minimo (come nel caso di un terreno ghiacciato), la ruota striscerebbe senza riuscire a rotolare.
La legge fisica alla base dell’attrito volvente è analoga a quella vista per l’attrito radente:
Fa= k·FP
Alcuni valori del coefficiente di attrito volvente.
v
Fa
Fp
Superfici
F
kv(mm)
Legno - Legno
0.5
Acciaio - Acciaio
0.05
Gomma - Asfalto
75
4
A parità delle altre condizioni, la resistenza opposta dall'attrito volvente è tanto minore quanto maggiore è il raggio di
curvatura del corpo che rotola. La relazione precedente allora si modifica nel seguente modo:
Fa= (kv·FP)/R
Attrito viscoso
Quando un corpo si muove all'interno di un fluido (liquido o gas) è soggetto ad una forza di attrito dovuta all'interazione
del corpo con le molecole del fluido. Tale forza è proporzionale ad un coefficiente di attrito viscoso e alla velocità
relativa fra corpo e fluido.
A seconda della velocità la legge fisica che esprime la forza viscosa è:
Fa= kvisc·v
(per moti a basse velocità)
Fa= kvisc·v2
(per moti ad alte velocità)
La forza elastica
Una molla ad elica, quando è sottoposta ad una forza esterna di intensità tale da non deformarla in modo permanente,
cessata la sollecitazione, riprende la forma iniziale grazie all’azione di una forza di richiamo; in tal caso si dice che il
comportamento della molla è elastico e la forza viene definita forza elastica Fe. Se la molla viene sospesa verticalmente
e si appende ad essa un corpo di massa m, la molla si allunga fino a quando la forza peso P del corpo viene equilibrata
dalla forza elastica. In queste condizioni P = Fe e pertanto il valore di P costituisce una misura di Fe. Si verifica che,
appendendo corpi di massa differente, gli allungamenti della molla sono direttamente proporzionali ai pesi P dei corpi.
Quindi:
La costante di proporzionalità k viene definita costante di elasticità della molla; è una proprietà caratteristica del tipo di
molla e del materiale di cui è fatta e le sue unità di misura sono [N/m].
5
Unità 3 – Statica ed equilibrio
Statica
La statica è la parte della meccanica che studia le condizioni di equilibrio di un corpo, ovvero le condizioni necessarie
affinché un corpo, inizialmente in quiete, resti in quiete anche dopo l’intervento di azioni esterne dette forze.
Punto materiale
Il punto materiale è un oggetto così piccolo rispetto all’ambiente circostante che esaminandolo può essere equiparato a
un punto geometrico dotato di una massa m; può spostarsi nello spazio ma non ruotare su se stesso, dato che non ha
dimensioni. Ad esempio un pallone da calcio visto dalla tribuna può essere assimilato ad un punto materiale, dato che
da quel punto di osservazione risulta molto piccolo.
Equilibrio di un punto materiale
Un punto materiale fermo rimane in equilibrio statico quando la risultante R di tutte le forze che agiscono su di esso è
R=0
nulla.
Quindi se la risultante di tutte le forze applicate ad un punto materiale fermo è nulla allora il corpo è in equilibrio
statico; viceversa se un punto materiale inizialmente fermo rimane fermo, allora è nulla la risultante di tutte le forze ad
esso applicate.
Questa appena enunciata è la relazione fondamentale dell’equilibrio statico per un punto materiale.
I vincoli
Raramente capita che un oggetto è totalmente libero di muoversi nell'ambiente circostante, più spesso può compiere
alcuni movimenti e altri no, poiché proibiti. Per comprendere chiaramente la questione si possono fare dei semplici
esempi.
1. se poggiamo un libro sul tavolo esso non sprofonda, ma rimane in equilibrio sul tavolo.
2. se appendiamo un quadro ad una parete esso non cade, ma resta appeso alla parete in equilibrio.
3. Infine se consideriamo un oggetto appeso al soffitto, come un lampadario, anch’esso non cade, ma resta fermo
in equilibrio.
Esaminando questi esempi possiamo capire che il loro comportamento è dovuto alla presenza di vincoli.
Un vincolo è un oggetto che limita le possibilità di movimento di un corpo solido, cioè impedisce a un corpo di
compiere alcuni movimenti.
Quindi sia il libro, sia il quadro e sia il lampadario sono vincolati da altri oggetti rispettivamente il tavolo, il muro, il
gancio che regge il lampadario che limitano la libertà di movimento dei vari oggetti.
Chiaramente se un corpo è in equilibrio deve valere la relazione fondamentale R = 0 e dato che ogni corpo sulla Terra
è soggetto alla forza peso FP , i vincoli devono a loro volta esercitare delle forze sul corpo per annullare la sua forza
peso. Queste forze, di contatto, sono dette reazioni vincolari e si indicano con
FV o con FR . Ogni vincolo esercita una
reazione vincolare, tale forza viene applicata sulla superficie del vincolo stesso. Nel caso degli esempi abbiamo la
situazione seguente:
FV
FV
FP
FP
FV
FP
R FP FV 0
FV FP
Quindi nella somma di tutte le forze applicate ad un punto materiale vanno considerate anche le reazioni vincolari.
Naturalmente ogni reazione vincolare non ha un valore fisso. Un vincolo adatta la propria reazione alla forza attiva che
agisce su di esso, nei nostri esempi la forza attiva era la forza peso.
Ogni vincolo non può resistere a qualunque forza attiva, oltre una certa soglia il vincolo si rompe, se il quadro è troppo
pesante il chiodo cede.
6
Applicazioni
Equilibrio di un punto materiale su di un piano orizzontale
Dato un punto materiale di massa m è posto su di un piano orizzontale, le condizioni di equilibrio statico impongono
che sia: R = 0 , risolvendo l’equazione si può ricavare il valore della reazione vincolare
R FP FV 0
FV FP
FP m g
FV m g
FP
FV
FV .
Relazione fondamentale
della statica di un punto
materiale
Risoluzione
Relazione della forza-peso
Soluzione finale
Corpo rigido
Si definisce corpo rigido, un corpo che occupa una certa porzione limitata dello spazio, dotato di una certa massa m e
indeformabile. Quindi un corpo rigido è un altro modello ideale di un corpo fisico reale. In questo caso abbiamo che il
corpo è esteso nelle tre dimensioni spaziali, ma viene considerato non deformabile, nella realtà tutti i corpi sono
deformabili.
I modelli che si studiano in fisica tendono spesso a semplificare certe grandezze, che non sono indispensabili in una
prima analisi. Nel caso del punto materiale il modello prevedeva un corpo dotato di massa ma privo di dimensioni
spaziali, questo perché per alcuni scopi tali dimensioni non sono importanti. Nel modello del corpo rigido abbiamo
invece le tre dimensioni spaziali, ma non abbiamo la possibilità di deformare il corpo. Infine il caso reale comprende
tutte le possibilità per un corpo.
Effetto di più forze su un corpo rigido
Se si applicano più forze su un punto materiale, queste passano tutte per uno stesso punto, ed è possibile sostituire tutte
le forze applicate con una risultante. Nel caso di un corpo rigido le cose sono più complesse, questo perché le forze
possono essere applicate in punti diversi del corpo.
Nell’applicazione di forze ad un corpo rigido bisogna tenere conto anche del punto di applicazione delle forze. Una
forza applicata ad un corpo rigido può essere spostata lungo la sua retta d’azione in un altro punto di applicazione dello
stesso corpo, senza che l’effetto della forza cambi; es. io posso spingere o tirare un oggetto senza che il risultato cambi.
Se invece la forza è applicata su un'altra retta d’azione l’effetto risulterà diverso.
Vediamo i vari casi possibili e commentiamo i risultati.
Forze che agiscono sulla stessa retta
Due forze applicate ad un corpo rigido in punti diversi, ma sulla stessa retta d’azione. Le due forze si possono spostare
fino ad occupare lo stesso punto di applicazione e si possono sostituire con la loro risultante. La forza risultante può
essere spostata lungo la retta d’azione senza cambiare l’effetto che le due forze iniziali producevano sul corpo rigido.
Retta di
applicazione forze
F1
F1
Corpo rigido
F2
F2
R F1 F2
7
Forze concorrenti in uno stesso punto
Si chiamano forze concorrenti in uno stesso punto, quando le rette di applicazioni dei vettori passano per uno stesso
punto del corpo rigido. La risultante delle forze concorrenti, applicata nel punto di intersezione, produce lo stesso
effetto sul corpo rigido.
In questi due casi si è visto che sostituendo alle forze applicate al corpo rigido, la forza risultante, l’effetto prodotto non
cambia.
F1
P
P
F1
F2
R F1 F2
F2
Forze parallele
Nel caso di due forze parallele applicate ad un corpo rigido, posso avere due casi: se i due vettori forza sono concordi,
allora la risultante delle due forze è applicata internamente alle due forze; se invece i due vettori sono discordi, allora la
risultante è applicata esternamente alle due forze.
La regola per trovare il punto di applicazione della forza risultante è:
d1:d2 = F2:F1
Con d1 distanza da F1 a P e d2 distanza da F2 a P.
Le distanze del punto P dalle due forze sono inversamente proporzionali alle intensità delle forze.
F2
Forze concordi
P
F1
d2
d2
d1
R F1 F2
d1
F
2
R F1 F2
F1
P
Forze discordi
Momento delle forze
Per le condizioni di equilibrio la differenza principale tra un corpo rigido e un punto materiale, è che il corpo rigido può
anche ruotare. La grandezza fisica che tiene conto degli effetti di rotazione di un corpo rigido è il momento delle forze.
Il momento di una forza F è la sua efficacia ad imprimere rotazione ad un corpo rigido.
Dato un certo corpo rigido ed una forza F ad esso applicato: il momento della forza F , rispetto ad un qualunque
punto O, è uguale al prodotto dell’intensità F della forza per il braccio b. Si definisce braccio di una forza F rispetto
ad un punto O, la minima distanza tra il punto O e la retta che contiene F .
Senso di rotazione
impresso dalla forza
Retta di applicazione forza
F
Orario
Negativo (-)
90°
b
M=F·b
O
Antiorario
Positivo (+)
8
Il momento della forza ha segno positivo quando la forza tende a produrre una rotazione in senso antiorario. Nel caso
contrario, rotazione in senso orario, il suo segno è negativo. Per una facilitare la memorizzazione si può ricorrere al
metodo del cacciavite, quando si avvita con il cacciavite corrisponde momento negativo, quando si svita momento
positivo.
L’unità di misura del momento è N·m. Inoltre il momento di una forza è anch’esso un vettore, con direzione
perpendicolare al foglio e verso entrante nel foglio se orario, uscente se antiorario.
Momento di una coppia
In una gran parte di fenomeni quotidiani abbiamo a che fare con coppie di forze uguali e contrarie che producono
rotazioni. Es: quando si gira il manubrio di una bicicletta, quando si gira una chiave o una maniglia, in tutti questi casi si
applicano due forze uguali e contrarie chiamate coppia di forze. L’effetto di rotazione dovuto a una coppia di forze è
descritto dalla grandezza fisica momento della coppia, che dipende dalle forze applicate e dalla loro distanza.
Il momento della coppia è dato dalla somma dei momenti delle forze rispetto al punto medio O. Esso è uguale al
prodotto dell’intensità F di una forza per la distanza d tra le rette di azione delle due forze. M = F·b + F·b = F·d
F
-F
b
O
b
d
M=F·d
Equilibrio di un corpo rigido
Un corpo rigido può spostarsi nello spazio (traslare) e inoltre può ruotare. Quindi un corpo rigido, inizialmente fermo, è
in equilibrio se:
Non tende a spostarsi (traslare)
Non tende a ruotare
Le forze causano le traslazioni, i momenti le rotazioni.
Un corpo rigido fermo rimane in equilibrio quando:
La somma vettoriale delle forze applicate su di esso è uguale a zero ( R = 0 );
La somma vettoriale dei momenti delle forze, calcolati rispetto a un punto qualsiasi, è uguale a zero (
MR 0)
La risultante delle forze applicata si calcola come nel caso del punto materiale, considerando la somma di tutte le forze
applicate. Il momento risultante si calcola come somma di tutti i momenti di ogni singola forza rispetto ad uno stesso
punto O.
Applicazioni
Le leve
Le leve sono dei dispositivi per amplificare o ridurre le forze. Esse sono costituite da un asta rigida che può ruotare
attorno a un punto fisso chiamato fulcro.
Condizioni di equilibrio:
bM
fulcro
FR
bR
O
FV
FM
R 0
M O 0
R FR FM FV 0
M O M R M M FR bR FM bM 0
Applicando le condizioni di equilibrio di un corpo rigido abbiamo che una leva è in equilibrio quando il momento della
forza resistente è uguale al momento della forza motrice.
FR ·bR = FM ·bM
Abbiamo indicato con:
9
FR la forza resistente
bR il braccio della forza resistente rispetto al fulcro
FM la forza motrice
bM il braccio della forza motrice rispetto al fulcro
A seconda di dove sono disposte le forze rispetto al fulcro posso avere tre casi distinti:
Leve di primo genere
Nelle leve di questo tipo il fulcro è posto tra le due forze. Una leva di questo tipo può essere vantaggiosa, svantaggiosa
o indifferente.
bR
bM
O
FM
FR
Si dice vantaggiosa quando il braccio della forza motrice è maggiore di quello della forza resistente, es. forbicine per
unghie;
Si dice svantaggiosa quando il braccio della forza motrice è minore di quello della forza resistente, es. forbici per la
carta;
Si dice indifferente quando il braccio della forza motrice è uguale a quello della forza resistente, es. la bilancia;
Leve di secondo genere
Nelle leve di secondo genere è la forza resistente ad essere posta tra il fulcro e la forza motrice. Una leva di questo tipo
è sempre vantaggiosa, perché il braccio della forza motrice è sempre maggiore di quello della forza resistente. Un
esempio di leva di questo tipo è lo schiaccianoci.
bR
FM
bM
O
FR
Leve di terzo genere
Nelle leve di terzo genere è la forza motrice ad essere posta tra il fulcro e la forza resistente. Una leva di questo tipo è
sempre svantaggiosa, perché il braccio della forza resistente è sempre maggiore di quello della forza motrice. Un
esempio di leva di questo tipo è la pinzetta per le ciglia.
bM
O
FM
bR
FR
10
Baricentro ed equilibrio
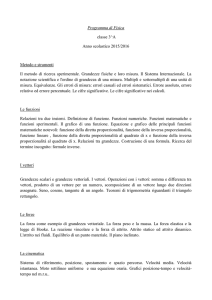
Esistono tre possibili posizioni di equilibrio di un corpo: equilibrio stabile, equilibrio instabile ed equilibrio
indifferente. Vogliamo illustrarle partendo dall'esempio in figura:
La sfera A occupa una posizione di equilibrio stabile: se spostiamo la sfera dalla posizione di equilibrio, lei tende a
tornare nella posizione di partenza. La sfera B occupa invece una posizione di equilibrio instabile: se la allontaniamo
dalla posizione di equilibrio, la sfera si allontana sempre più dalla posizione di partenza. La sfera C invece occupa una
posizione di equilibrio indifferente: se la allontaniamo dalla posizione di partenza lei si sposta per assumere una nuova
posizione di equilibrio. Su un piano orizzontale ogni punto corrisponde a una posizione di equilibrio.
In alcune situazioni la posizione del baricentro (ossia il punto in cui possiamo pensare concentrata tutta la massa di un
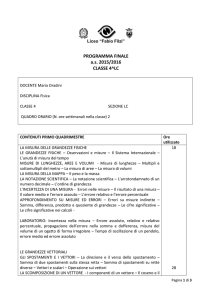
corpo) gioca un ruolo importante nella classificazione delle posizioni di equilibrio. Supponiamo di avere un'asta
omogenea. La possiamo appendere ad un punto posto sopra il baricentro, ad un punto posto sotto il baricentro o ad un
punto coincidente con il baricentro, come nella figura sottostante:
Nella figura di sinistra il baricentro sta al di sotto del punto di rotazione. La posizione verticale dell'asta è una posizione
di equilibrio stabile: infatti se spostiamo l'asta dalla posizione verticale si genera un momento orario che tende a
riportare l'asta nella sua posizione di partenza. Nella figura centrale invece il baricentro sta al di sopra del punto di
rotazione. L'equilibrio è instabile: infatti se spostiamo l'asta dalla posizione di equilibrio il momento orario tende ad
allontanare l'asta dalla posizione di partenza e a rovesciarla. Nella figura a destra invece il baricentro coincide con il
punto attorno al quale avviene la rotazione. In questo caso l'equilibrio è indifferente e l'asta tende a rimanere nella
nuova posizione in cui è stata portata. Infatti, poiché la retta d'azione della forza-peso passa per il centro di rotazione,
abbiamo che il momento della forza-peso è nullo e non si genera alcuna rotazione.
Nella valutazione dell'equilibrio di un corpo assume la sua importanza anche la posizione relativa del baricentro e della
superficie d'appoggio. Per avere equilibrio è fondamentale che la verticale passante per il baricentro di un corpo cada
all'interno della superficie d'appoggio del corpo stesso. Se invece tale verticale interseca il perimetro della superficie
d'appoggio allora l'equilibrio diventa instabile. Se infine la verticale per il baricentro cade fuori dalla superficie
d'appoggio del corpo in esame allora la situazione non è più di equilibrio perchè si genera un momento in grado di far
ruotare il corpo.
11