ALGORITMI INNOVATIVI PER L’EQUALIZZAZIONE DI UN
SISTEMA AUDIO DIGITALE ALL’INTERNO DI UN AUTOVEICOLO
Stefania Cecchi, Paolo Peretti, Lorenzo Palestini, Laura Romoli, Francesco Piazza
Dipartimento di Ingegneria Biomedica, Elettronica e Telecomunicazioni
Università Politecnica delle Marche
Via Brecce Bianche, 60131 Ancona
L'equalizzazione acustica è un concetto complesso, soprattutto nel caso di un sistema audio
all’interno di un autoveicolo che è ben noto essere un ambiente di ascolto non ideale: è un
ambiente piccolo ed estremamente rumoroso che produce degli effetti negativi sulle
caratteristiche spettrali, spaziali e temporali del campo sonoro emesso. Inoltre i sistemi di
riproduzione sono multicanale e possono essere presenti diversi ascoltatori in posizioni
differenti e nello stesso tempo, presentando quindi diverse condizioni di ascolto.
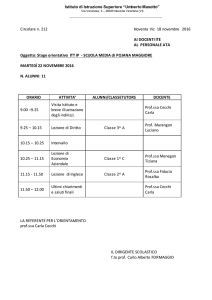
Nell’ambito del progetto europeo IP hArtes (VI programma quadro), le cui attività
sono partite nel settembre del 2006, l’unità di Ancona collabora con numerose università e
grandi aziende europee al fine di realizzare un sistema audio avanzato per migliorare
l’esperienza di ascolto in macchina, rendendo l’ambiente più confortevole [1,2,3,4,5] (Fig1a).
Uno degli obiettivi è quello di realizzare un sistema di equalizzazione che rappresenta una
fase fondamentale per avere un sistema ottimale di riproduzione sonora, indipendente dalle
condizioni fisiche dell’ambiente. L’equalizzazione fissa (non adattativa), può risolvere questo
problema solo parzialmente, dal momento che l’ambiente è strettamente variabile [1,2]. Un
equalizzazione adattativa invece, in relazione alle variazione dell’ambiente (rumore di fondo,
numero e posizione dei passeggeri, andamento del veicolo), sembra essere la soluzione più
indicata.
L’approccio proposto deriva da un algoritmo monocanale per l’equalizzazione di una
stanza [2,4]. Considerando lo schema in Fig. 1b, il segnale di ingresso viene trasformato nel
dominio di Fourier, suddiviso in sottobande attraverso l’utilizzo di un banco filtri: il suo
spettro di ampiezza viene equalizzato in ogni sottobanda e poi riportato nel dominio del
tempo per essere inviato agli altoparlanti. Equalizzazione viene effettuata in sottobande nel
dominio della frequenza, considerando il segnale microfonico
e il segnale di ingresso
filtrato per una curva di equalizzazione che si vuole ottenere; i segnali vengono
suddivisi in sottobande attraverso il banco filtri, e all’istante n, l’equalizzatore è definito da
guadagni
che vengono ottenuti attraverso un algoritmo di adattamento. In formule
possiamo scrivere che
in
, dove
è il fattore di
adattamento dipendente dalla frequenza ed è l’operatore di media. Per ogni -esimo valore
di banda, viene calcolato come la media di
definito come
su
un intervallo di tempo . Per prevenire artifatti o valori eccessivi del guadagno, vengono
considerati sui pesi
tre tipi di controlli: un controllo di banda per evitare valori
eccessivi al di sotto e al di sopra di una determinata banda di frequenza, che potrebbero
comportare un filtro inverso troppo lungo con possibili introduzioni di aliasing o la presenza
di aumenti troppo elevati del guadagno stesso con conseguenti danni o sovraccarichi sugli
altoparlanti; un controllo sui guadagni per evitare eccessive attenuazioni; uno smoothing del
vettore dei pesi risultante dai due controlli precedenti per ridurre le diseguaglianze nella curva
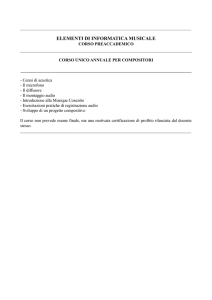
di equalizzazione. In Fig.2a e 2b vengono mostrati gli effetti dell’equalizzazione sia fissa che
adattativa considerando la risposta impulsiva di un sistema reale. Dai grafici è evidente come
l’equalizzazione adattativa riesca maggiormente a soddisfare l’andamento della curva
desiderata, modificando la percezione del suono riprodotto.
Fig 1. (a) Sistema hardware realizzato all’interno del progetto hArtes (b) Schema a blocchi del sistema di
equalizzazione adattativo.
Sviluppi futuri sono orientati verso l’introduzione di tecniche per la realizzazione di
equalizzazione multi punto, ovvero riferita a più microfoni posizionati all’interno
dell’autoveicolo, per poter realizzare un ascolto omogeneo su tutto l’ambiente.
Fig 2. Effetto dell’equalizzazione su una risposta impulsiva reale di una macchina (a) equalizzazione fissa.
(b) equalizzazione adattativa.
[1] F.Piazza, S.Cecchi, L.Palestini, P.Peretti, F.Bettarelli, A.Lattanzi, E.Moretti, E.Ciavattini ,
Demonstrating hArtes project approach through an Advanced Car In-formation System",
ISVCS – Int. Symp. on Vehicular Computing Systems - July 22-24, 2008 – Dublin
[2] S.Cecchi, L.Palestini, P.Peretti, E.Moretti, F.Piazza, A.Lattanzi, F.Bettarelli, “Advanced
Audio Algorithms for a Real Automotive Digital Audio System" 125th AES Convention - 2-5
October 2008, San Francisco
[3] F.Piazza, S.Cecchi, L.Palestini, P.Peretti and S.Squartini, “Advanced CIS Architecture
and Algorithms for Enhanced in-Car Audio Listening" 2009 IEEE Int. Conf. on Networking,
Sensing and Control Okayama City, Japan, March 26-29, 2009
[4] S. Cecchi, L. Palestini, P. Peretti, F. Piazza, F. Bettarelli, and R. Toppi, “Automotive
Audio Equalization" accepted at AES 36th Int. Conf., Dearborn, Michigan,USA, 2009 June
[5] F. Piazza, S. Cecchi, L. Palestini, A. Lattanzi, F.Bettarelli, F. Capman, S. Thabuteau, C.
Levy, J.F.Bonastre and R.Toppi “The hArtes Carlab: hardware implementation and algorithm
development" accepted at AES 36th Int. Conf., Dearborn, Michigan, USA, 2009 June