==================================================
IL CONTROLLORE
PROGRAMMABILE
SIEMENS S5-100U:
INTRODUZIONE ALL’USO
==================================================
2
1. Cenni Preliminari
1.1 Parti costitutive il PLC
E’ costutuito da 5 parti fondamentali:
L’alimentatore per il collegamento diretto alla rete 115/230 V c.a.;
L’unità centrale di processo (CPU);
I moduli bus;
Le unità periferiche da collegare ai bus;
Le unità di interfacciamento.
Nel PLC S5-100 U, queste parti non si trovano compattate ma suddivise in tanti
componenti che possono essere poi uniti per realizzare un sistema “su misura” per ogni
singola esigenza dell’industria. Il sistema modulare di bus consente l’installazione di un
massimo di 32 unità periferiche.
L’unità centrale contiene sia la CPU, sia un alimentatore a 24 V c.c.; i moduli bus
possono ospitare sino a 2 unità periferiche e mettere in collegamento tra loro unità su bus
distinti.
1.2 Unità periferiche
Il PLC S5-100 U dispone dei seguenti tipi di unità periferiche:
Unità di ingresso e uscita digitali (INPUT/OUTPUT classici) da impiegare per
svolgere semplici funzioni digitali di comando. Ci sono unità a 4 e 8 canali;
Unità di ingresso e uscita analogiche (INPUT/OUTPUT variabili); gli INPUT
da impiegare per le grandezze variabili con continuità, come corrente, tensione,
temperatura e resistenza. Gli OUTPUT per corrente e tensione. Entrambi i tipi di unità
sono a 4 canali.
Simulatori (INPUT/OUTPUT speciali), che simulano i segnali in ingresso,
come ad esempio la chiusura di un interruttore, e visualizzano gli stati delle uscite.
Alimentatori, che forniscono la tensione di alimentazione al controllore e
funzionano con le tensioni 115 e 230 V c.a. (adatta anche alla nostra rete a 220 V).
Temporizzatori esterni, da impiegare quando si vuole poter variare i tempi di
impostazione senza agire sul programma ma dall’esterno.
Contatori esterni, che permettono l’impostazione dei conteggi senza variare il
programma interno.
Comparatori, che servono a controllare i valori di tensione e corrente.
Unità di interfaccia, che permettono di disporre il PLC su più file (fino ad un
massimo di 4).
Moduli di memoria, che permettono la conservazione di programmi importanti
anche in caso di scarica della batteria tampone.
3
1.3 Il dispositivo programmatore
Il programma utente, per essere svolto , deve essere inserito nella memoria interna
dell’unità centrale attraverso un particolare dispositivo detto programmatore.
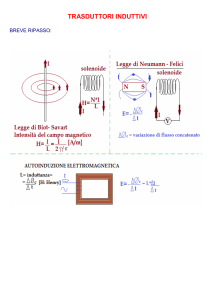
Questo programmatore possiede una tastiera con tutte le funzioni di
programmazione (AND, OR, OUT, ecc.) ed ha un display che ci permette di visualizzare
istante per istante ciò che stiamo scrivendo. In figura è presentata la tastiera del
programmatore PG 605 U. I singoli tasti possono avere una o più funzioni; nel caso si
voglia attivare una funzione della linea superiore (colorata in azzurro per meglio essere
distinta) bisogna premere innanzitutto il tasto di predisposizione in basso a sinistra
(SHIFT), quindi il tasto interessato. Quando invece le due funzioni sono dello stesso
colore è il programmatore che dà al tasto nel momento della pressione il corretto
significato.
Analizziamo ora solo i tasti a noi significativi partendo dall’alto a sinistra:
Tasto
U
SE
O.
SI
N
E
A
O
U(
L
T
O(
)
=
PB
K
XI
Funzione
Funzione AND
Temporizzatore ritardato all’inserzione
Funzione OR di 2 segnali
Temporizzatore ritardato all’apertura
Suffisso di negazione del contatto (NOT)
Ingresso INPUT
Uscita OUTPUT
Funzione OR di gruppi AND
Funzione AND con apertura parentesi
Caricamento di un valore
Funzione di temporizzazione
Funzione OR con apertura parentesi
Chiusura parentesi
Comparazione
Blocco di programma
(preceduto da L) Caricamento di una costante
Cancellazione
Essendo solo all’inizio della trattazione potrebbe non avere molto significato questa
esposizione di tasti, tuttavia sarà molto utile poter avere a disposizione questa tavola
quando si inizierà a parlare di programmazione.
4
2. Struttura interna della CPU
Della CPU fanno parte:
L’unità di governo, ovvero la CPU vera e propria;
La memoria RAM;
L’immagine di processo, ovvero l’analizzatore
digitali/analogici;
Le funzioni di temporizzazione e conteggio;
I merker.
di ingressi ed uscite
2.1 L’Unità di governo
Essa è l’organizzatrice del controllore; analizza ogni singola linea del programma
contenuto nella memoria operando “ciclicamente”: giunta al termine del programma
utente, ricomincia a svolgerlo dalla prima istruzione. Questa elaborazione ciclica passa
attraverso le seguenti fasi:
1. All’inizio del ciclo, l’unità di governo legge tutti gli ingressi e deposita il loro
stato nella PAE (immagine di processo relativa agli ingressi);
2. Comincia la lettura del programma, vengono effettuate le combinazioni logiche
prelevando i dati dal PAE, il PLC lavora con temporizzatori, contatori interni ed esterni e
con i merker;
3. I risultati delle elaborazioni vengono mandati nel PAA (immagine di processo
relativa alle uscite) per formare la configurazione relativa alle uscite;
4. Al termine della esecuzione del programma l’unità di governo preleva i dati dalla
PAA e li trasferisce alle unità di uscita.
2.2 Memorie RAM, EPROM ed EEPROM
Il controllore opera le proprie funzioni in base al programma utente contenuto nella
memoria RAM, precedentemente caricata tramite programmatore o modulo di memoria
esterno di tipo EPROM o EEPROM.
La memoria RAM (Random Access Memory), è una memoria in cui l’utente può
scrivere informazioni e poi rileggerle successivamente. E’ però di tipo cosidetto
“volatile” cioè, mancando la tensione di alimentazione, perde il proprio contenuto.
I controllori contengono normalmente una batteria tampone che ha il compito di
mantenere alimentata la memoria RAM quando non è presente la tensione di rete.
La memoria EPROM (Erasable Programmable Read Only Memory) ha la
caratteristica di richiedere un particolare circuito per essere caricata e l’impiego di una
lampada a raggi ultravioletti per la sua cancellazione. Trattiene le informazioni
immagazzinate anche in mancanza di alimentazione. I moduli di memoria EPROM della
SIEMENS sono programmabili con l’impiego del programmatore ma devono essere
cancellati con l’apposita lampada.
La memoria EEPROM (Elettrically Erasable PROM) è molto simile alla EPROM,
mantiene le informazioni in mancanza di tensione ed è cancellabile applicando un segnale
5
elettrico di intensità prefissata. In particolare i moduli EEPROM della SIEMENS sono
cancellabili e riscrivibili tramite impiego del programmatore.
Questi 3 tipi di memorie dagli stessi compiti, ma aventi caratteristiche differenti,
presentano prezzi ben distinti. Andrà perciò attentamente vagliato l’acquisto di
un’eventuale memoria EPROM o EEPROM. Mentre la prima è più indicata quando il
programma da memorizzare non dovrà poi subire modifiche, la seconda sarà impiegata là
dove si prevede di dover fare successivamente modifiche al programma memorizzato.
6
3. Indirizzamento
3.1 Definizione
Ogni indirizzo si compone di:
Un’abbreviazione che individua il tipo di unità inserita;
Un cosidetto numero di posto connettore;
Un numero di canale.
I numeri di posto connettore e canale sono separati da un puntino.
Es.
E 0.5
E
tipo di unità
E-EINgang ovvero ENTRATA
0.
numero posto conn.
A-AUSgang ovvero USCITA
5
numero canale
Con il controllore S5-100 U è possibile impiegare fino a 16 moduli bus e, quindi, 32
unità. Il numero di posto connettore viene determinato dalla posizione fisica dell’unità
partendo dalla prima a destra della CPU denominata 0. Il numero di canale è segnalato
sulle singole unità e, a seconda del modulo scelto, può variare da 0 a 3 (unità a 4 canali) o
da 0 a 7 (unità a 8 canali). Nel caso di montaggio su più file la numerazione procede da
sinistra verso destra e dal basso verso l’alto.
3.2 Indirizzamento di Contatori e Temporizzatori esterni
Temporizzatori e contatori esterni presentano le seguenti caratteristiche:
Si indirizzano come le unità digitali;
Possono essere inseriti ovunque;
Sono a due canali: sono disponibili numeri di canale 0 e 1;
Vengono trattati come normali unità di ingresso/uscita.
IMPORTANTE
La connessione dei vari moduli e di ogni altra apparecchiatura al PLC va effettuata
con l’interruttore in posizione OFF.
7
4. Modi di funzionamento
4.1 Funzionamento in modo “RUN”
Nel funzionamento in modo “RUN” il PLC si comporta nel modo seguente:
Elabora ciclicamente il programma utente;
Fa scorrere i tempi attivati (temporizzatori);
Interroga le unità in ingresso;
Attiva le uscite.
4.2 Funzionamento in modo “STOP”
Il funzionamento in modo “STOP” è caratterizzato dalle seguenti condizioni:
Non viene elaborato il programma utente;
Vengono conservati i valori di temporizzatori, contatori, merker, e d’immagine di
processo che erano presenti al momento del passaggio in modo “STOP”;
Le unità di uscita sono bloccate allo stato 0.
4.3 Funzionamento in modo “COPY”
Con il commutatore in posizione “COPY” si effettua il trasferimento del programma
dalla memoria interna del modulo CPU (RAM) al modulo di memoria EPROM o
EEPROM e viceversa.
Il processo di copiatura è segnalato da una variazione di luminosità del led rosso sul
pannellino di servizio dell’unità centrale; se lampeggia il led “STOP” vuol dire che si è
avuto un errore nel processo di copiatura. Ad ogni trasferimento di programma vengono
eliminati i blocchi non validi.
5. Il software
5.1 Il listato
Dal momento in cui il controllore viene portato in modo “RUN” questo inizia a
svolgere il programma contenuto nella memoria RAM, ad effettuare le combinazioni
logiche prelevando gli stati di ingressi, contatori e temporizzatori dalla PAE ed a
posizionare nella PAA lo stato delle uscite. Tutte queste operazioni vengono svolte
ordinatamente così come sono state impostate e prendono il nome di istruzioni.
L’insieme di tutte le istruzioni da luogo alla lista di istruzioni o listato, abbreviato AWL.
Tutte le istruzioni sono strutturate nella stessa maniera:
8
La prima parte comunica al controllore l’azione da compiere (es. fare una somma
logica) e si dice operazione, la seconda comunica l’oggetto dell’azione richiesta (es. un
ingresso) e si dice operando.
5.2 La programmazione
Se il programmatore è connesso al PLC e il commutatore si trova in posizione
“STOP” sul display è presente una barretta lampeggiante, il cosidetto cursore, che ha il
compito di indicare in ogni momento la posizione del campo di visualizzazione in cui ci
troviamo.
se si vuole scrivere un programma nuovo è essenziale effettuare una cancellazione
completa della memoria . Premiamo nell’ordine i seguenti tasti: <SHIFT>, <XI>. Sul
visore apparirà la scritta CANCELLAZ.AG. Per ottenere la cancellazione effettiva andrà
premuto due volte il tasto di conferma (<INSERT>).
Ciò che scriveremo ora potrebbe diventare parte di un programma più grosso; il
nostro programmino prenderà allora il nome di Blocco di programma (PB).
In modo particolare chiameremo PB 1 questo blocco e di ciò dovremo avvisare il
programmatore. Premiamo quindi i seguenti tasti <>, <PB>, <1>, <INSERT>.
5.3 Combinazione logica AND
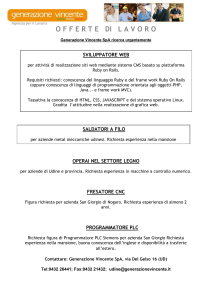
Con riferimento alla figura nella pagina seguente (a), possiamo scomporre il circuito
mostrato in due parti distinte, una cosidetta di comando e una di potenza: il PLC
rivoluzionerà la parte di comando.
Analizziamo il circuito: Quando il pulsante 1 e il pulsante 2 sono entrambi chiusi la
bobina A è alimentata, il contatto A si chiude e il motore si avvia.
E’ sufficiente che uno solo dei due pulsanti si apra che la bobina A di diseccita, il
contatto A si apre e il motore si arresta.
Possiamo quindi dire che se 1 e (AND in inglese, UND in tedesco) 2 sono chiusi la
bobina A è alimentata. Se vogliamo realizzare il suddetto circuito con l’impiego del PLC
dovremo procedere alla seguente maniera (vedi fig. b):
9
Comando
Parametro
Riga
Comando
Indirizzo
U
(AND)
U
(AND)
=
E1
(INPUT)
E2
(INPUT)
A
(OUTPUT)
000:
U
(AND)
U
(AND)
=
E 0.0
(INPUT)
E 0.1
(INPUT)
A 1.0
(OUTPUT)
(b)
002:
004:
( c ) Listato [AWL]
10
Tuttavia, i parametri da noi indicati (E1, E2, A) non sono però comprensibili al
nostro PLC. Dovremo allora indicare parametri (ossia indirizzi) realmente esistenti nel
nostro controllore. Supponendo allora una configurazione in cui al posto connettore 0 è
ubicato un modulo di ingressi a 8 canali (E 0.0 ...... E 0.7) e al posto connettore 1 è
ubicato un modulo di uscite a 8 canali (A 1.0 ...... A 1.7), potremo ricavare il nostro listato
definitivo [AWL] così come riportato in figura (c).
Sarà poi nostro compito collegare il pulsante “1” al morsetto “0” del modulo
INPUT, collegare il pulsante “2” al morsetto “1” dello stesso modulo e la bobina del
teleruttore al morsetto “0” del modulo di OUTPUT.
Se durante la scrittura del programma si preme un tasto sbagliato è possibile
effettuare la correzione tramite il tasto <>. I tasti <> e <> permettono invece di
scorrere lungo il programma scritto.
Terminata l’introduzione battere ancora <INSERT> per confermare. In questo
modo, passati alla condizione “RUN”, avremo che la nostra uscita si troverà allo stato
logico “1” (e quindi alimenterà la nostra bobina) quando sia l’ingresso E 0.0 che
l’ingresso E 0.1 saranno allo stato logico “1” (ovvero pulsanti chiusi). Analizzando il
circuito attraverso l’algebra di Boole possiamo dire che la funzione logica AND ha
realizzato il prodotto logico tra E 0.0 ed E 0.1.
5.4 Combinazione logica OR
Facciamo ora un esempio relativo alla combinazione logica OR. Dovremo
innanzitutto cancellare la memoria del controllore battendo i tasti <SHIFT>, <XI> e
<INSERT>. Sul display apparirà la seguente indicazione: CANCELLAZ.AG ?.
Battiamo ancora <INSERT> per confermare. Non è indispensabile cancellare la memoria
del programmatore: è possibile anche scrivere un nuovo PB 1 il quale andrà ad eliminare
automaticamente quello precedente.
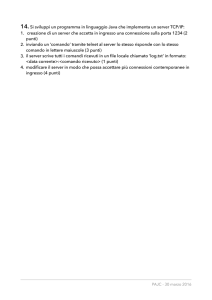
Supponiamo ora di volere realizzare lo schema di figura:
11
In detto circuito la bobina A risulterà alimentata se il pulsante E 0.0 è chiuso, o (OR
in inglese) se lo è l’E 0.1. Procedendo analogamente alla combinazione AND possiamo
battere il seguente listato:
Riga
000:
002:
004:
Comando
O.
(OR)
O.
(OR)
=
Indirizzo
E 0.0
(INPUT)
E 0.1
(INPUT)
A 1.0
(OUTPUT)
La prima cosa che risulta evidente è che senza aver modificato la connessioni al
PLC si è potuto modificare la funzione dei pulsanti E 0.0 ed E 0.1. Con un sistema
tradizionale si sarebbe dovuta cambiare la connessione reciproca dei pulsanti; il PLC è
quindi in grado di modificare la funzione di ingressi ed uscite semplicemente
modificando il programma utente.
Se ora passiamo al modo RUN, avremo che la nostra uscita si troverà in stato logico
“1” quando l’ingresso E 0.0 o l’E 0.1 si troverà allo stato logico “1” Possiamo allora dire
che la funzione OR ha realizzato una somma logica tra E 0.0 ed E 0.1.
6. Correzione di un programma
6.1 Modificare un programma
la modifica di un programma può essere fatta in ogni momento anche senza bloccare
il funzionamento del PLC.
Si dovranno innanzitutto premere i seguenti tasti: <>, <SHIFT>, <PB>, <1>,
<INSERT>. Ora il programmatore ha richiamato il programma PB 1 ma il PLC svolge
ancora normalmente le funzioni di questo blocco di programma.
Effettuiamo la modifiche necessarie spostandoci lungo il programma tramite i tasti
<> e <> ed escludendo o inserendo altre righe con il tasto <>.
Terminate le modifiche bisogna reimmetterlo nella memoria del controllore creando
innanzitutto uno STOP non con l’apposito commutatore (che cancellerebbe il contenuto
del programmatore ) ma da tastiera. Battiamo 2 volte il tasto <> seguito da <>, <1>,
<INSERT>. Il display segnalerà AG STOP ?. Battiamo <INSERT> per confermare.
Premiamo <>, <INSERT>, <INSERT>; apparirà la dicitura PG AG ?. Battiamo
<INSERT> per confermare ed il programmatore chiederà ancora SOVRASCRITTURA
? ( del nuovo PB 1 su quello preesistente); confermiamo ancora battendo <INSERT>.
Facciamo infine ripartire il PLC con le seguenti istruzioni: <>, <2>, <INSERT>.
Tutte queste ripetute conferme servono unicamente ad evitare di commettere errori
(come sovrascrizioni, cancellazioni, ecc.) indesiderati.
6.2 Codici di errore
12
Uno dei principali motivi per cui il PLC a volte deve essere riprogrammato è perchè
nel listato sono presenti degli errori che non permettono la corretta esecuzione del
programma.
Il PLC SIEMENS S5-100 U ci viene incontro segnalandoci l’errore in cui è
incappato tramite un codice numerico. Eccone l’interpretazione:
Codice
12
Causa / Significato
Blocco non ammesso
15
Modo di operare errato
30
50
Blocco non previsto
Tasto errato
51
73
Comando sconosciuto
Superamento del
parametro
Nessun blocco nel PG
84
Rimedio
Rivedere denominazione
blocco PB 1
PLC “STOP” e ripetere
funzione
//
Cancellare e premere il
tasto adeguato
Dare il giusto comando
Inserire comando con
parametro compatibile
//
13
7. Programmazione complessa
7.1 Combinazione logica di AND prima di OR
Osserviamo la figura alla pagina seguente; in questo circuito, affinchè la bobina A
1.0 venga attivata si devono verificare le seguenti condizioni:
E 0.0 ed E 0.1 oppure E 0.2 ed E 0.3 devono essere contemporaneamente chiusi.
Il listato relativo risulta essere allora:
Riga
000:
002:
004:
006:
008:
00A:
Comando
U
U
O
U
U
=
Indirizzo
E 0.0
E 0.1
E 0.2
E 0.3
A 1.0
Cancelliamo il programma già contenuto in memoria, battiamo il listato sopra
descritto e passiamo in modalità RUN. Verifichiamone anche stavolta il corretto
funzionamento.
Tuttavia se osserviamo attentamente il listato ci accorgiamo del fatto che abbiamo
utilizzato in questo caso l’istruzione O in luogo di O.. I motivo è il seguente:
Quando si deve realizzare l’OR tra singoli operandi va impiegata l’istruzione O.,
invece se si deve realizare l’OR tra gruppi di funzioni AND va impiegata l’istruzione O.
14
7.2 Combinazione logica di OR prima di AND
Osserviamo la figura seguente:
Ci accorgiamo che affinchè la bobina A 1.0 venga attivata si dovrà avere che o E
0.0 o E 0.1 sia chiuso, inoltre che o E 0.2 o E 0.3 sia chiuso, infine che o E 0.4 o E 0.5
sia chiuso.
Tradotto in listato:
Riga
000:
002:
004:
006:
008:
00A:
00C:
00E:
010:
012:
014:
016:
018:
Comando
U(
O.
O.
)
U(
O.
O.
)
U(
O.
O.
)
=
Indirizzo
E 0.0
E 0.1
E 0.2
E 0.3
E 0.4
E 0.5
A 1.0
Inseriamo il programma nella memoria del controllore e verifichiamone il
funzionamento. Osserviamo che le combinazioni OR che devono essere connesse da
combinazioni AND vanno racchiuse tra parentesi.
15
7.3 Contatti ausiliari
Con il PLC SIEMENS è possibile sfruttare quali contatti ausiliari quelli interni alla
macchina senza dover ricorrere ad altri eventualmente presenti sul teleruttore. Nella
stesura del software i contatti ausiliari relativi ad una bobina vanno trattati come normali
contatti, similmente a quelli esterni.
Consideriamo ad esempio lo schema rappresentato in figura:
Si tratta un circuito ad autoritenuta, ed il listato relativo sarà:
Riga
000:
002:
004:
006:
Comando
O.
O.
U
=
Indirizzo
E 0.0
A 1.0
E 0.1
A 1.0
Inseriamo il listato nel programmatore e verifichiamone il funzionamento:
Premendo il pulsante E 0.0, se il tasto E 0.1 è chiuso, la bobina A 1.0 viene alimentata.
Nel momento in cui risulta alimentata A 1.0 anche il contatto ausiliario A 1.0 posto in
parallelo ad E 0.0 cambierà di stato, passando da aperto a chiuso.
Ora se anche si rilascia il pulsante E 0.0, la bobina continuerà ad essere alimentata
attraverso il contatto A 1.0. L’apertura del tasto E 0.1 provocherà la diseccitazione della
bobina: Questo tipo di circuito viene normalmente chiamato “marcia-arresto motore”. La
funzione del pulsante E 0.0 è quella di avviare il motore mentre quella del tasto E 0.1 è
quella di arrestarlo.
Importante è osservare che, mentre il comando alla riga 002 ha per indirizzo un
contatto ausiliario, quello alla riga 006 ha per indirizzo una bobina. Niente paura, il PLC
non commette errori di interpretazione in quanto pur avendo entrambe le istruzioni il
medesimo operando (A 1.0), presentano però distinte operazioni (O. una e = l’altra).
7.4 Contatti negati
16
Rifacendosi al circuito ad autoritenuta di cui al precedente paragrafo, abbiamo detto
che la bobina A 1.0 può eccitarsi alla chiusura di E 0.0 solo se il tasto E 0.1 è chiuso. Se
invece in luogo del tasto vogliamo utilizzare un pulsante, dovremo adottarne uno un po'
particolare che, in condizioni di riposo, sia chiuso.
Questo tipo di pulsante viene comunemente definito “normalmente chiuso” per
distinguerlo da quelli presi in considerazione fino ad ora e detti “normalmente aperti”.
Il circuito di “marcia-arresto” può essere allora realizzato in due modi differenti: o
come mostrato in precedenza, o come in figura:
Il pulsante E 0.1 di questo circuito verrà programmato come normalmente chiuso e,
per verificare il funzionamento di quest’ultimo dovremo cablare al morsetto
corrispondente all’indirizzo, in luogo del tasto un pulsante normalmente aperto (non
occorre collegarne uno normalmente chiuso come potrebbe sembrare, in quanto lo si
programmerà come se fosse normalmente chiuso). Bisognerà poi sostituire l’istruzione di
cui alla riga 004 con la seguente:
Riga
004:
Comando
UN
Indirizzo
E 0.1
L’istruzione UN sta a significare AND NEGATO o AND NOT, ovvero un contatto
serie normalmente chiuso; mentre l’istruzione ON (OR NEGATO o OR NOT) indica un
contatto parallelo normalmente chiuso.
17
7.5 Temporizzatori
Le funzioni di temporizzazione vanno impiegate là dove occorre che avvenga un
certo fenomeno dopo un prefissato tempo t che sia trascorso da quando è avvenuta una
data condizione.
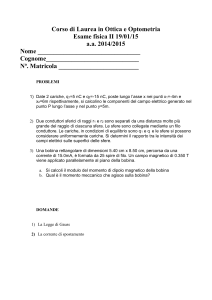
Osserviamo la seguente figura:
Chiudendo il contatto E 0.0 si eccita la bobina del temporizzatore T1, che inizia il
conteggio e dopo un certo tempo t, supponiamo 7 secondi, attiva il contato T1 che da
aperto (stato di partenza normalmente aperto decretato dall’istruzione SE) si chiude ed
eccita la bobina A 1.0. Ecco il listato relativo:
Riga
000:
002:
004:
006:
008:
Comando
U
L
SE
U
=
Indirizzo
E 0.0
KT 70.1
T1
T1
A 1.0
Se si vuole ottenere l’effetto contrario, e cioè il contatto T1 che si chiude
immediatamente chiudendo E 0.0 e si riapre poi dopo 7 secondi, l’istruzione alla riga 004
andrà così modificata:
Riga
004:
Comando
SI
Indirizzo
T1
Se si vuole cambiare invece il tempo di ritardo si dovrà modificare la riga 002.
Questo, invece, il significato dei nuovi comandi introdotti:
18
Comando
Funzione
L
KT
70.1
Caricamento di una costante
Abbreviazione per valore costante di tempo
Il primo termine rappresenta il valore di tempo
impostato (da 0 a 999), il secondo la base dei
tempi (da 0 a 3).
Vi sono diverse varianti per la base dei tempi:
Base
0
1
2
3
Funzione
Valore
Valore
Valore
Valore
x
x
x
x
0.01
0.1
1
10
Secondi
Secondi
Secondo
Secondi
Nel parametro del nostro esempio, KT 70.1, il 70 rappresenta il valore e 1 la base
dei tempi: Questo parametro perciò equivale a 70 x 0.1 Secondi, cioè 7 Secondi.
Se vogliamo fissare un tempo di 7 secondi abbiamo tuttavia 3 diverse possibilità di
definire il parametro per il valore del tempo:
Comando
KT 700.0
KT 70.1
KT 7.2
Valore Temporale
Impostato
700 x 0.01
= 7 secondi
70 x 0.1 = 7 secondi
7 x 1
= 7 secondi
Tanto più piccola è la base dei tempi, tanto maggiore è la precisione fornita dal
temporizzatore.
19
Indice
1 Cenni preliminari
1.1
1.2
1.3
Parti costitutive il PLC
Unità periferiche
Il dispositivo programmatore
2 Struttura interna della CPU
2.1
2.1
L’unità di governo
Memorie RAM, EPROM ed EEPROM
3 Indirizzamento
3.1
3.2
Definizione
Indirizzamento di contatori e temporizzatori esterni
4 Modi di funzionamento
4.1
4.2
4.3
Funzionamento in modo RUN
Funzionamento in modo STOP
Funzionamento in modo COPY
5 Il software
5.1
5.2
5.3
5.4
Il listato
La programmazione
Combinazione logica AND
Combinazione logica OR
6 Correzione di un programma
6.1
6.2
Modificare un programma
Codici di errore
7 Programmazione complessa
7.1
7.2
7.3
7.4
7.5
Combinazione logica di AND prima di OR
Combinazione logica di OR prima di AND
Contatti ausiliari
Contatti negati
Temporizzatori