PRINCIPIO DI RELATIVITA’ E TRASFORMAZIONI GALILEIANE
Il principio di relatività galileiana afferma l'assoluta equivalenza fisica di tutti i sistemi di
riferimento inerziali: nessun esperimento eseguito all'interno di un dato sistema di riferimento può
evidenziare il moto rettilineo ed uniforme dello stesso sistema, o, in altre parole, le leggi fisiche
scoperte da sperimentatori che lavorino in laboratori in moto relativo rettilineo ed uniforme
devono avere la stessa forma. Si tratta ora di ricavare le formule che legano le coordinate spazio
temporali di uno stesso evento visto da due diversi riferimenti e di provare che le leggi della fisica
sono invarianti, nella forma, al passaggio da un riferimento all'altro: si tratta cioè di tradurre in
formule il contenuto di questo principio.
Cominciamo a precisare meglio i termini della questione definendo alcuni concetti importanti.
Un evento è qualcosa che avviene in un determinato punto dello spazio, ad un dato istante di tempo.
Un fenomeno è un insieme di eventi: per esempio il moto di un oggetto, l’emissione e
l’assorbimento di un segnale luminoso… ed è quindi rappresentato da un insieme di punti nel
diagramma spazio-tempo; tali punti possono formare una curva continua (come nel caso di un
moto) o essere separati. La curva che descrive il moto di un oggetto è detta linea d’universo del
corpo.
Il fatto stesso di rappresentare gli eventi in un diagramma presuppone tuttavia che ad ogni posizione
nello spazio, e ad ogni istante, sia associato un numero, e quindi che sia possibile misurare
(useremo spesso il termine osservare come sinonimo) l’evento. Per fare ciò l’osservatore deve
dunque essere munito di un orologio e di un righello (che supponiamo di estensione infinita, o
perlomeno sufficiente a misurare tutti gli eventi che vorremo) che gli permettono di determinare
posizione ed istante associati ad ogni evento.
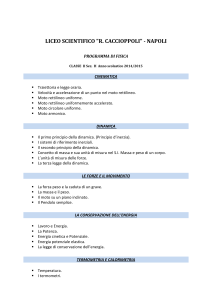
Si considerino due riferimenti, S ed S', di cui S'
mobile, rispetto ad S, di moto rettilineo ed
uniforme, con velocità
.( Figura 1)
Si supponga che gli osservatori solidali ad S e S'
siano dotati di due orologi per la misura dei
tempi, preventivamente sincronizzati in modo
che, per esempio, quando O coincide con O'
entrambi gli orologi segnino zero. Non è
restrittivo supporre, come noi faremo che i due
riferimenti abbiano in comune l’asse delle
ascisse e che
sia parallela allo stesso asse x
Figura 1
. Si consideri un certo evento fisico che avviene in un punto P con coordinate (x,y,z) e (x', y',z')
rispetto a S e S' rispettivamente, e negli istanti t e t' misurati dai due osservatori. Tenendo conto che
OO' = Vt e che sembra ovvio supporre t'=t, dalla figura a lato segue subito che valgono le cosiddette
trasformazioni Galileiane delle coordinate,
1
Osserviamo in particolare che la quarta di queste formule è sempre stata ritenuta evidente, e lo è
ancora nella vita pratica. La negazione dell'ipotesi (perchè si tratta di un'ipotesi e non di una
proprietà dimostrata sperimentalmente) che gli orologi dei due osservatori debbano segnare lo
stesso tempo costituisce, come vedremo, uno degli aspetti innovativi della relatività Einsteniana.
Dalle relazioni precedenti, proprio grazie all’invarianza della coordinata temporale, si deducono,
dividendo per Δt, le relazioni tra le velocità e le accelerazioni misurate dai due osservatori
Riassumiamo quindi le
Trasformazioni Galileiane:
Più in generale potremo dire che
x' x Vx t
y ' y V y t
z z V t
z
E scrivere formule analoghe per le componenti delle velocità.
Le componenti delle accelerazioni risulteranno uguali nei due riferimenti.
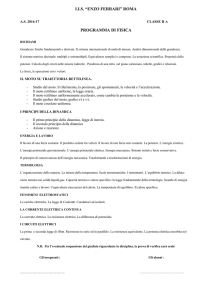
Se lo spazio fisico a disposizione è unidimensionale (per esempio una retta) un evento può essere
rappresentato da un punto in un diagramma ts. Per semplificare le rappresentazioni, d’ora in poi noi
ci occuperemo sempre di uno spazio unidimensionale. ( Figura 2)
Spazio unidimensionale
Le equazioni della trasformazione si riducono a
x' x vt
t
t'
Va
a a
Vr V
ar
( Velocità assoluta = velocità relativa+ velocità di trascinamento
Accelerazione assoluta = accelerazione relativa)
2
Figura2
.
Per familiarizzare con questa modo di interpretare i fenomeni immaginiamo , per semplicità , il
moto di una particella che si muova sull’asse x e trascuriamo le altre due coordinate spaziali.
Il valore dell’ascissa, corrispondente ad una determinata posizione della particella si legge
facilmente sull’ asse x, quando sia stata scelta l’unità di misura.
Supponiamo ora che lungo l’asse x siano disseminati anche tanti orologi tra di loro sincronizzati,
capaci di associare ad ogni valore di x, un ben determinato valore di t.
In tal modo il moto di una particella diventa una successione di eventi (x,t) rappresentabili in un
piano in cui l’asse delle x è l’asse delle ascisse e l’asse delle t è quello delle ordinate.
In generale si possono confrontare i <<punti di vista>> di ciascun osservatore mediante le formule
di trasformazione, proprio come , in geometria, si studiano le proprietà delle figure rispetto a due
riferimenti diversi, ovvero si confrontino due figure corrispondenti in una trasformazione. In questo
modo anche gli invarianti , nel loro significato fisico, possono essere studiati con il linguaggio della
Geometria.
Se la particella P si muove di moto rettilineo
uniforme, con velocità v, la sua linea universo è
rappresentata da una retta di equazione x-vt=0.
Anche per il punto O, solidale col riferimento , si
può tracciare la linea universo, la retta x=0, in
quanto la posizione di O non varia, ma le sua
coordinata temporale varia istante per istante,.
Anche P, secondo il suo punto di vista resta
sempre nello stesso posto, l’origine della sua
linea universo.
Figura 3
3
RELATIVITA’ E TRASFORMAZIONI
Il Principio di Relatività al di là della descrizione di alcuni risultati della cinematica e della
dinamica dei modi relativi, apre un’ampia prospettiva sul modo di concepire lo spazio e il tempo e
sul significato oggettivo delle grandezze fisiche.
Vogliamo pertanto analizzarne contenuti e conseguenze alla luce di varie conquiste del pensiero
matematico e scientifico nell’arco di evoluzione della fisica classica
L’ enunciato diventa innanzitutto più significativo se si introduce il concetto di Sistema di
riferimento inerziale:
Le leggi della Meccanica sono le stesse per tutti i riferimenti inerziali, che pertanto sono tutti tra di
loro equivalenti. Solo considerazioni di carattere pratico o convenzionali suggeriscono la scelta di
un riferimento privilegiato, a seconda dei casi la terra ,le stelle fisse etc.
E’ evidente il legame col Principio di Inerzia e con quello di composizione dei movimenti
Il moto di un punto materiale può essere studiato dal punto di vista di due riferimenti diversi. S ed
S’. Se il loro moto relativo è rettilineo uniforme, nella fisica classica si passa dall’uno all’altro
mediante le Trasformazioni di Galileo( TG), che permettono di calcolare le coordinate e la
velocità in S’ , quando siano note in S.
Si dimostra che, rispetto alle TG ,risultano invarianti la distanza temporale tra due eventi e la
lunghezza di un segmento, ovvero la distanza spaziale tra due eventi contemporanei
Quando Einstein sostituisce al Principio di Relatività classica il suo Principio di relatività Ristretta,
lo fonda analiticamente su un altro gruppo di trasformazioni, le Trasformazioni di Lorentz (TL),
rispetto alle quali è invariante l’intervallo spazio-temporale
Le leggi della Fisica, sia della Meccanica che dell’Elettromagnetismo sono le stesse per tutti i
riferimenti inerziali, quando si applicano le TL
.
Quando, agli inizi del ‘900, il problema della simmetria delle leggi fisiche e quello, ad esso
collegato, della struttura dello spazio-tempo, divenne uno dei problemi centrali della fisica, risultò
naturale il riferimento al metodo che Klein ( Programma di Erlangen- 1872) adottò in Geometria,
caratterizzando le proprietà geometriche in base al gruppo di trasformazioni rispetto al quale sono
invarianti.
Lo stesso Klein afferma (F. Klein, Physik. Zeitschr. 12, 17 (1911). )I fondamenti geometrici del
gruppo di Lorentz ( pdf )
<<Lo studio della misura proiettiva , che già per tanti aspetti è divenuto fondamentale riceve qui
un’applicazione nuova e sorprendente perché i moderni sviluppi del fisici, che al novellino fanno
così facilmente l’impressione di paradossi, risultino per così dire come corollari di una linea di
pensiero generale già da lungo tempo ben stabilita.
Ciò che i fisici moderni chiamano teoria della relatività è la teoria degli invarianti della varietà
spazio-temporale tetradimensionale (x,y,z,t)
4
(l’universo di Minkowskj ) rispetto ad un determinato gruppo di collineazioni, il “Gruppo di
Lorentz”..>>
Il concetto di invarianza delle leggi fisiche rispetto ad un gruppo continuo di trasformazioni si
rivelò ben presto una delle innovazioni più significative e feconde della fisica moderna ,
specialmente quando a loro volta le proprietà di simmetria dello spazio-tempo sono state collegate
con i tre principi di conservazione, della quantità di moto, del momento angolare e dell’energia,
( Engel –1916)
Scrive Weil nel suo Simmetry(1952) : “ Condividiamo ancor oggi la sua ( di Keplero) fede
nell’armonia matematica dell’universo: essa ha retto all’esame di un’esperienza sempre più vasta .
oggi però non ricerchiamo più quest’armonia in forme statiche come i poligoni regolari, ma in
leggi dinamiche”
Le leggi fisiche esprimono le relazione che gli eventi fisici devono soddisfare, i principi di
simmetria rappresentano condizione imposte alle leggi stesse .
L’applicazione della teoria dei gruppi alla fisica trovò terreno fertile soprattutto nella Meccanica
quantistica , in fisica atomica nello studio delle particelle elementari.
Innanzitutto consideriamo lo spazio degli eventi,R4 , dotato di tre coordinate spaziali (x,y,z) e una
coordinata temporale, ottenuto aggiungendo la coordinata temporale un ordinario spazio geometrico
euclideo
Le TG possono essere considerate come un caso particolare un più generale gruppo di
trasformazioni, che chiameremo il Gruppo di Galileo, costituito da trasformazioni che
agiscono su R4 con
una traslazione temporale
una traslazione spaziale
una rotazione
una trasformazione a un sistema in moto con velocità v
Il problema degli invarianti può essere espresso in questi termini
Supponiamo di conoscere , in un determinato R4,la posizione e la velocità di una particella e le
forze ad essa applicate.
Le leggi della meccanica di Newton permettono di prevedere il moto e l’evoluzione della particella.
Cosa cambia e cosa rimane invariato se studiamo il moto della particella in un altro riferimento
ottenuto applicando al riferimento R4 una trasformazione del gruppo di Galileo?
5
Casi particolari
1)Traslazione temporale
Studiamo il moto nelle stesse condizioni iniziali, ma a partire da un istante t+to
E’ facile verificare che non cambierà il tipo di moto, nè la forma della traiettoria
Il Principio di relatività in questo caso si traduce in un principio di omogeneità del tempo
2) Traslazione , rotazione o rototraslazione spaziale
Sappiamo dallo studio delle trasformazioni lineari che le suddette sono trasformazioni isometriche,
che lasciano invariate le lunghezze.
Ne consegue che restano invariate le misure degli spostamenti e quindi della velocità e
dell’accelerazione, e anche delle le forze, che in generale dipendono dalla distanza o dal tempo.
Il Principio di relatività diventa un principio omogeneità e di isotropia dello spazio
3) Passaggio da un sistema inerziale S ad un altro sistema S’ anch’esso inerziale
Applicando le trasformazioni di Galileo si trova che
a)Posizione, spostamento e velocità non sono invarianti, ma seguono le leggi dei moti relativi.
In particolare la particella può essere in quiete rispetto ad S’ e in moto rettilineo uniforme rispetto
ad S ( o viceversa)
Pertanto
Quiete e moto rettilineo uniforme sono fisicamente indistinguibili
Ovvero
I concetti di quiete o moto rettilineo uniforme non hanno validità assoluta
b) l’accelerazione è invece invariante
pertanto
il concetto di moto accelerato ha validità assoluta
c) La coordinata temporale è invariante
pertanto
6
il concetto di simultaneità è un concetto assoluto
d) La distanza temporale tra due eventi è invariante
Il tempo è un concetto assoluto
e) la distanza spaziale euclidea ,
x 2 y 2 z 2 è invariante
Facciamo in proposito un’importante osservazione:
Consideriamo un’asta rigida solidale col riferimento S’ e decidiamo di misurarne la lunghezza.
Un osservatore solidale con S’ e quindi fermo rispetto all’asta, può tranquillamente usare un regolo
graduato o determinare la posizione delle due estremità dell’asta e calcolarne la distanza col metodo
delle coordinate.
Un osservatore solidale con S può usare solo il secondo metodo, a patto però di avere l’accortezza
di determinare la posizione delle due estremità nello stesso istante.
Si troverà pertanto, supponendo che siano sufficienti le sole coordinate sull’asse x, e ricordando che
t=t’
xa = x’a + vt
xb = x’b +vt
e sottraendo membro a membro
xb-xa = x’b –x’a
Se i due osservatori conoscono il valore v della loro velocità relativa possono anche procedere in tal
modo;
Sincronizzano inizialmente i loro orologi
L’osservatore O legge sul suo orologio l’istante in cui passa davanti a lui il primo estremo dell’asta
e poi quello in cui vede passare il secondo estremo, poi calcola la lunghezza come v*Δt
L’osservatore O’ deve utilizzare due orologi, uno in corrispondenza dell’estremo A e l’altro in
corrispondenza dell’estremo B , per prendere nota del passaggio di O davanti ad A e poi davanti a
B.
Se tutti gli orologi sono sincronizzati , i risultati non possono che coincidere
Possiamo concludere che la lunghezza di un segmento ha carattere assoluto , ma
La sua invarianza è legata all’invarianza del tempo
7
f) il secondo principio della dinamica F = ma è invariante
Infatti
m è considerata invariante ( caratteristica del corpo)
a è invariante
la forze, che in generale dipendono dalla distanza o dal tempo , è invariante
g) il terzo principio della dinamica ovvero il principio di conservazione della Quantità di moto è
covariante nel senso che il valore della quantità di moto dipende dal riferimento, ma il principio
resta verificato in S come in S’
Consideriamo in S un sistema costituto da due masse, M ed m , di velocità V e v, rispettivamente.
Se P1 = M Viniziale + m viniziale è la quantità di moto del sistema prima dell’interazione , e P2 =
Vfinale + m finale è la quantità di moto dopo l’interazione, per il terzo Principio sarà P1 = P2.
Passando al riferimento S’
P’1= M(Viniziale-vt) + m (viniziale -vt)= P1+(M+m)vt
P’2= M(V finale-vt) + m (v finale -vt)= P2+(M+m)vt
Quindi, se P1 = P2., anche P’1 = P’2.
Analogamente
h)Il principio di conservazione dell’energia è covariante
Consideriamo come esempio un carrellino su cui è fissata una catapulta che, grazie ad una molla
compressa, lancia un proiettile P con velocità v rispetto al carrello, il quale acquisterà una velocità
W di rinculo.Sfruttando la conservazione della quantità di moto e dell’energia possiamo scrivere
mv MW
1 2 1
2
2 mv 2 MW
0
L
dove L è il lavoro compiuto dalla molla, pari all’energia elastica immagazzinata
8
Nel caso in cui il carrellino si muove di moto rettilineo uniforme , con velocità V, rispetto al
tavolo Ox, che consideriamo fermo, le equazioni precedenti vanno interpretate in un riferimento
solidale col carrello .
Rispetto al riferimento del tavolo possiamo applicare innanzi tutto il Principio di conservazione
della quantità di moto m(v V ) M (V W ) ( m M )V da cui mv+MW=0.
1
Per quanto riguarda le energie cinetiche , consideriamo quella iniziale (m M )V 2 e quella finale
2
1
1
m(v V ) 2 M (V W ) 2 del sistema
2
2
La seconda equazione, dopo semplici passaggi algebrici,
1 2 1
1
1
1
1
mv MW 2 (m M )V 2 V (mv MW ) mv 2 MW 2 (m M )V 2
2
2
2
2
2
2
Pertanto l’aumento di energia , dovuto al lavoro della forza elastica, è uguale nei due riferimenti
Osservazione: l’energia cinetica del proiettile, misurata rispetto al tavolo, è maggiore , dato che la
velocità è maggiore, ma in compenso è minore l’energia cinetica finale del carrello , in quanto v e
W hanno verso opposto
LE TRASFORMAZIONI GAILEIANE COME CASO PARTICOLARE DI AFFINITA’
OMOLOGICA SPECIALE.
Proviamo ora ad esprimere le proprietà delle trasformazioni galileiano utilizzando metodi e
linguaggio della Geometria.
Nell’ambito della teoria delle trasformazioni lineari del piano, le trasformazioni galileiane possono
essere classificate come un caso particolare di affinità omologica speciale.
Infatti dall’invarianza del tempo, si deduce che le rette di equazione t = costante ( le “rette di
simultaneità”si trasformano in se stesse ( rette globalmente unite) , mentre la retta di equazione t =0
è luogo di punti uniti ( retta puntualmente unita)
P' P
v
t
La trasformazione è pertanto un’affinità omologica speciale di asse l’asse delle x. Il rapporto
è la caratteristica dell’omologia .
9
Fissato un riferimento Otx, la trasformazione è determinata quando si conosce la linea universo di
O’ e viceversa ( Figura 4)
Poiché l’omologia subordina su ogni retta parallela all’asse delle ascisse una traslazione
( x=x’ +vt) si può eseguire facilmente una costruzione grafica dei due punti corrispondenti:
dato P’(x’;t’), il punto P deve appartenere alla stessa retta di simultaneità ( parallela per P’ all’asse
delle ascisse) Il vettore di traslazione KH è individuato dale intersezioni della retta di simultaneità
con le due linee universo.
K
vt
H
E’ possibile costruire una <<Macro>> con “Cabri” in modo da disegnare il punto rappresentativo di
un determinato evento, sia nel riferimento Otx che nel riferimento O’t’x’
Gli esempi seguenti utlizzano un file in CABRI ( Trasf-galileiane)
Vediamo ora come appare il moto di un punto P secondo il punto di vista di ciascuno dei due
osservatori O e O’.
La velocità di O’ rispetto ad O è V, pertanto rispetto ad O’, O si muove con velocità -V
Nel riferimento di O’ , il <<navilio>> di Galileo, un punto P si muove con velocità Vr.
L’evento A(x’A,tA) , rappresenta l’inizio del moto e l’evento B(x’B,tB), la fine.
I due osservatori concordano sulla durata del fenomeno ( distanza temporale dei due eventi)
Non concordano sul valore della distanza spaziale e sul valore della velocità di P ( pendenza
della retta AB o A’B’)
10
Fig.5
Fig.6
Si avrà Δx>Δx’ e Va>Vr nel caso in cui V e Vr sono concordi, ( Figura5) il contrario se V e Vr sono
discordi (Figura6)
Se P è fermo per O’, per O si muove con velocità V (Figura7), Se per O’ si muove con velocità –V,
per O è fermo ((Figura8)
Fig. 7
Fig.8
Lunghezza di un segmento
Come abbiamo precedentemente osservato, la misura della lunghezza di un segmento è legata al
concetto di simultaneità assoluta ed all’invarianza del tempo.
Possiamo dire che la lunghezza di un segmento corrisponde alla distanza spaziale di due eventi
simultanei,
La Figura 9 mostra come in questo caso la distanza spaziale sia la stessa in entrambi i riferimenti.
11
Fig. 9
Area di un triangolo.
L’affinità omologica speciale è una trasformazione equivalente, conserva cioè le aree( infatti il
determinante della matrice è uguale a 1).
Dimostriamo che questo invariante ,interpretato dal punto di vista fisico, è legato all’invarianza
dell’accelerazione, nel passaggio da un sistema inerziale all’altro
Con riferiomento alla figura 10, un punto si muove per un intervallo di tempo τ1
Con velocità v1, poi per un intervallo di tempo τ2 con velocità v2.
Gli eventi A, B, C rappresentano rispettivamente l’inizio del moto, la fine della prima fase, la fine
del moto
L’area del triangolo ABC può essere calcolata sottraendo dall’area del triangolo ACK le aree dei
triangoli ABJ e CBH e del rettangolo BHKJ, ovvero
AK * CK AJ * BJ BH * CH
KJ * KH
2
Ma AK*CK = (AJ+JK)(CH+HK)= AJ*CH +JK*CH+AJ*HK+ JK*HK
AJ*HK = AJ*BJ
JK*CH =BH*CH
Sostituendo
Area (ABC) =
AJ * CH JK * HK 2 KJ * KH AJ * CH KJ * HK
2
2
12
Calcoliamo ora l’accelerazione media ( indichiamo con S1 ed S2 gli spazi percorsi nelle due fasi del
moto, uguali rispettivamente alle lunghezze dei segmenti AJ e BH e con t1 e t2 i rispettivi
intervalli di tempo, uguali rispettivamente alle lunghezze dei segmenti BJ e CH)
S 2 S1
v 2 v1
t2
t1
S t S 1t 2
21
t1 t2
t1 t 2
t1t 2 (t1 t 2 )
Poiché il numeratore, a meno del segno, corrisponde all’area precedentemente trovata, mentre al
denominatore compaiono solo misure della variabile tempo, si deduce che l’invarianza
dell’accelerazione è legata all’invarianza del valore dell’area del triangolo.
ESERCIZIO 1
Tracciate in un diagramma xt:
due eventi contemporanei; evidenziate nel diagramma la distanza spaziale tra di essi
due eventi avvenuti nello stesso luogo a istanti diversi; evidenziate l’intervallo di tempo trascorso
tra di essi;
la linea d’universo di un oggetto fermo;
la linea d’universo di un oggetto in moto uniforme a bassa velocità;
la linea d’universo di un oggetto in moto uniforme ad alta velocità;
ESERCIZIO 2
Tracciate un diagramma xt e la linea universo di un punto O’ che si allontana da O con velocità V.
Siano A l’evento di coordinate (0;10) e B(0;20) rispetto ad O.
Determinare:
le coordinate di A e di B rispetto ad O’
la distanza spaziale tra i due eventi misurata da O
la distanza spaziale tra i due eventi misurata da O’
la distanza temporale tra i due eventi misurata da O
la distanza temporale tra i due eventi misurata da O’
ESERCIZIO 2
13
Una cabina a base quadrata di lato 10m , si muove rispetto ad un riferimento Oxyz solidale con la
terra con velocità 20 m/s, diretta lungo l’asse xDal centro O’ del pavimento parte una biglia che si muove con velocità di 2 m/s nella stessa
direzione e verso della cabina.
La biglia urta elasticamente sulla parete opposta e torna indietro nel punto O’.
Determinare le coordinate dei due eventi
A (partenza della biglia da O’) e B( ritorno della biglia in O’) rispetto ad O rispetto ad O’.
Rappresentare gli eventi in un diagramma spazio-tempo.
Tracciare la linea universo della biglia
, come quello di Figura 1:
due eventi contemporanei nel sistema A; sono contemporanei anche in B? evidenziate nel
diagramma la distanza spaziale tra di essi; è la stessa nei due sistemi?
due eventi avvenuti nello stesso luogo a istanti diversi; sono avvenuti nello stesso luogo anche per
B? evidenziate l’intervallo di tempo trascorso tra di essi nei due sistemi; è lo stesso?
14
la linea d’universo di un oggetto fermo nel sistema A; è fermo anche in B?
la linea d’universo di un oggetto in moto uniforme in A; è in moto anche in B? con la stessa
velocità?
la linea d’universo di un oggetto in moto accelerato in A; è accelerato anche in B?
ESERCIZIO 3
Utilizzando la macro costruita nell’esercizio 3, trasformate dal sistema A a quello B:
due eventi contemporanei nel sistema A; sono contemporanei anche in B? evidenziate nel diagramma la distanza
spaziale tra di essi; è la stessa nei due sistemi?
due eventi avvenuti nello stesso luogo a istanti diversi; sono avvenuti nello stesso luogo anche per B? evidenziate
l’intervallo di tempo trascorso tra di essi nei due sistemi; è lo stesso?
due eventi avvenuti in luoghi e tempi diversi in A; misurate la loro distamza spaziale e l’intervallo di tempo: si
conservano nella trasformazione?
la linea d’universo di un oggetto fermo nel sistema A; è fermo anche in B?
la linea d’universo di un oggetto in moto uniforme in A; è in moto anche in B? con la stessa velocità? cosa succede se la
linea d’universo dell’oggetto in moto è parallela a quella di B?
la linea d’universo di un oggetto in moto accelerato in A; è accelerato anche in B?
ESERCIZIO 5 (MISURA DI LUNGHEZZE)
Ricordiamo che per misurare la lunghezza di un oggetto è necessario determinare la posizione dei suoi estremi nello stesso istante.
Disegnate le linee d’universo degli estremi di un oggetto fermo in O e misuratene la lunghezza.
Misuratene la lunghezza in O’. Cosa osservate? Variate la velocità di O’ rispetto ad O, facendola diventare anche negativa. Cosa succede?
ESERCIZIO 6
Utilizzando la macro costruita nell’esercizio 3, trasformate dal sistema A a quello B la linea d’universo di un corpo in moto rettilineo uniforme.
Misurate l’angolo che tale linea forma con l’asse t, l’angolo che la linea trasformata forma con l’asse t’, l’angolo che la linea d’universo dei B
forma con t. Calcolate le tangenti di tali angoli e riportateli in una tabella, per diversi valori di e . Cosa si osserva? Ricordate che la tangente
dell’angolo formato dalla linea d’universo e l’asse t è la velocità del moto.
ESERCIZIO 7
Utilizzando la macro costruita nell’esercizio 3, trasformate dal sistema A a quello B un insieme qualunque di punti, colorando in modo uguale ogni
punto ed il suo trasformato. Provate a muovere i punti originali e la linea d’universo di B. Su che curva stanno ogni punto ed il suo trasformato?
Possiamo determinare delle curve invarianti per trasformazioni di Galileo? Qual è il significato fisico di queste curve invarianti?
ESERCIZIO 8
Utilizzando la macro costruita nell’esercizio 3, trasformate dal sistema A a quello B un insieme di punti che siano i vertici di un poligono, e costruite
anche il poligono trasformato. Misurate l’area di entrambi, poi modificate il poligono originale e la linea d’universo di B. Cosa si osserva?
[file TrasfGalileoAree]
15