POLITECNICO DI MILANO
Facoltà di Ingegneria
Dipartimento di Elettronica e Informazione
Introduzione a
System Identification Toolbox
di MATLAB
Corso: Identificazione dei Modelli e Analisi dei Dati
Prof. Sergio BITTANTI
ORGANIZZAZIONE DELLA PRESENTAZIONE
Esempio guida
Rappresentazione e trattamento dei dati sperimentali
Calcolo del predittore
Stima non parametrica di un modello:
» Stima di correlazione
» Stima spettrale
Stima parametrica di un modello
» Stima dei modelli col metodo dei Minimi Quadrati
» Stima dei modelli col metodo della Massima Verosimiglianza
Scelta del modello ottimo e sua validazione
» Analisi della complessità
» Analisi dei residui: bianchezza dell’errore
» Confronto di diversi modelli
Algoritmi di identificazione ricorsivi e con oblio
L’interfaccia grafica ident
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Introduzione
Tipicamente un problema di identificazione inizia dopo aver
progettato un set significativo di prove sperimentali ed aver
raccolto una serie di dati dal sistema in esame.
In questa presentazione supporremo sempre un approccio “Black
Box” al problema dell’identificazione; in altre parole, ci
muoveremo come se non sapessimo nulla della fisica del sistema
che genera i dati.
Se i dati sono contenuti in un file .mat (estensione dei file di dati
in matlab), il primo comando da digitare nel prompt di Matlab è:
“» load nomefile”
Ciò renderà i dati sperimentali disponibili nel Workspace della
sessione di Matlab attiva.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Esempio Guida
Nel seguito, tutti gli esempi presentati faranno riferimento ad uno
specifico sistema, che ora introduciamo.
I dati sono stati raccolti simulando un sistema AR(3), asintoticamente
stabile:
y(t ) a1 y(t 1) a2 y(t 2) a3 y(t 3) e(t )
con e(t ) WN (4,1) .
I dati raccolti dalla simulazione sono stati memorizzati in due vettori
chiamati ingresso (per il segnale e(t)) ed uscita (per il segnale y(t)),
ognuno contenente 10000 campioni.
Sulla base di tali dati si calcolerà il predittore e, nell’ipotesi che il vero
meccanismo di generazione dei dati sia ignoto, si vedrà come
impostare la stima parametrica e non parametrica di un modello. Infine
si passerà alla validazione del modello scelto.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Rappresentazione e trattamento dei
dati sperimentali
Per iniziare, viene creato un oggetto iddata dove vengono salvati i dati.
Questo oggetto consentirà di porre in un’unica struttura le diverse
informazioni, cui si potrà accedere (come in un’usuale struttura C) con la
notazione puntata
nomemodello.proprietà
Il comando Matlab è: >> mymod=iddata(uscita,ingresso,1);
Con il comando >> get(mymod) si visualizzano a video tutte le proprietà dei
dati.
Analogamente, il comando >> set(mymod) consente all’utente di modificare
le proprietà dei dati.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Rappresentazione e trattamento dei
dati sperimentali
La prima operazione da farsi sui dati prima di intraprendere la fase di identificazione
vera e propria è la rimozione di eventuali trend presenti nei dati stessi. Nel caso
dell’esempio guida il trend si riduce al valor medio non nullo della serie temporale. I
comandi che seguono rimuovono il trend e visualizzano il risultato di tale operazione:
>> figure % creo una figura in cui plottare i dati
>> subplot(2,1,1) %divido la figura in 2 parti in cui plotterò uscita e ingresso originali e senza trend
>> plot(ingresso(1:100)); % grafico sulla finestra di grafico creata i primi 100 campioni del segnale in ingresso
>> hold on; % mantengo aperta la figura corrente per plottare l’ingresso dopo il detrend nella stessa finestra
>> y=detrend(ingresso); %assegno alla variabile y i valori dell’ingresso da cui viene rimosso il trend
>> plot(y(1:100),'r') %grafico nella stessa finestra i campioni dell’ingresso dopo il detrend in rosso
>> hold off; % rilascio la figura corrente
>> subplot(2,1,2) %creo una seconda finestra nella figura
>> plot(uscita(1:100)); % grafico sulla finestra di grafico creata i primi 100 campioni del segnale in uscita
>> hold on; % mantengo aperta la figura corrente per plottare l’usicta dopo il detrend nella stessa finestra
>> u=detrend(uscita); %assegno alla variabile u i valori dell’uscita da cui viene rimosso il trend
>> plot(u(1:100),'r') %gafico nella stessa finestra i campioni dell’ingresso dopo il detrend in rosso
>> hold off; % rilascio la figura corrente
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Rappresentazione e trattamento
dei dati sperimentali
- la funzione detrend
In generale, la funzione detrend (utilizzata nell’esempio precedente per rimuovere
il valor medio) offre la possibilità di rimuovere diversi tipi di trend
La sintassi completa della funzione è:
>> new_mod=detrend(mod,o,breakpoint)
dove:
mod è un oggetto iddata;
o è l’ordine del trend da rimuovere. Di default o=0: in questo caso si rimuove il
trend “di ordine 0”, ossia la media del segnale. Con o=1 si possono eliminare i
trend lineari, con o=2 i trend quadratici e così via; aumentando il valore del
parametro o vengono rimossi trend polinomiali di ordine crescente.
E’ possibile decidere anche su quale parte dei dati la funzione deve agire (è
possibile infatti che la presenza del trend interessi solo una porzione dei dati).
Specificando nel parametro breakpoint gli estremi della porzione di dati a cui
applicare il detrend si può applicare la funzione solo alla parte dei dati di interesse.
L’output della funzione new_mod è un oggetto iddata che conterrà tutti i segnali
contenuti in quello di partenza mod privati del trend.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Rappresentazione e trattamento dei
dati sperimentali
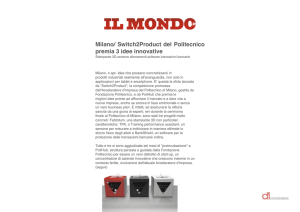
Nella figura
vediamo il risultato
dell’operazione di
detrend
sull’esempio guida.
Nella finestra in
alto sono mostrati i
campioni del
segnale in ingresso
originali (blu) e
dopo il detrend
(rosso). Nella
finestra in basso gli
analoghi andamenti
dell’uscita.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Calcolo del predittore
Si vuole ora ottenere, a partire dai dati raccolti, una predizione dei valori futuri
dell’uscita del processo mediante un modello (MA,AR(X),ARMA(X)) che l’utente
può scegliere per descrivere i dati raccolti.
La sintassi della funzione Matlab che fa questo tipo di analisi è:
>> yhat = predict(modello,dati,k,init)
dove: modello è il tipo di modello che si è scelto per descrivere il meccanismo di
generazione dei dati;
dati è un oggetto di tipo iddata;
k è l’orizzonte predittivo;
init è la modalità di inizializzazione; se init ='estimate‘ lo stato iniziale è fissato al valore
che minimizza l’errore di predizione associato al modello ed ai dati; init = 'zero' fissa lo
stato iniziale a zero; init = 'model' usa lo stato inziale del modello che viene
automaticamente salvato alla sua creazione.
L’output è: yhat, un ogetto iddata i cui OutputData sono i valori predetti.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Calcolo del predittore
A partire dai primi 5000 dati raccolti nel vettore uscita, generati per
simulazione tramite l’esempio guida, si identifica un modello AR(3).
Per l’identificazione del Matlab utilizza, in questo caso, l’algoritmo dei
Minimi Quadrati. Se si fosse desiderato identificare, invece, un
modello ARMA, Matlab avrebbe ricorso all’algoritmo della Massima
Verosimiglianza.
>> modello = ar(uscita(1:5000),[3]);
In questo modo si è identificato il modello AR(3). Questo modello può
essere utilizzato per formare la predizione. In una prima fase, la
predizione viene effettuata sui primi 5000 dati, gli stessi usati per
l’identificazione:
>> yhat = predict(modello,[ingresso(1:5000);uscita(1:5000)],2,’estimate’);
In una seconda fase, la predizione viene effettuata sui restanti dati,così
da avere un criterio oggettivo di valutazione della bontà predittiva del
modello:
>> compare(yhat,modello,2,5001: end);
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Calcolo del predittore
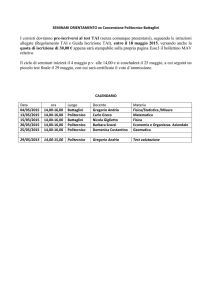
Nella figura si
vede il confronto
tra la seconda metà
dei dati e valori
predetti dell’uscita
in base al modello
AR(3) stimato.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Stima non parametrica
In questa sezione ci occuperemo di stimare alcune caratteristiche del
meccanismo di generazione dati (a noi noto solo attraverso una sua
realizzazione) in modo non parametrico, senza passare attraverso
l’identificazione preventiva di un modello.
Il primo passo per avere informazioni sulle caratteristiche del sistema è fare
una stima della funzione di covarianza campionaria. Ciò si ottiene col
comando:
>>Gammahat = covf(mymod , 1);
dove: mymod è un iddata che contiene i dati in ingresso e in uscita;
1 indica che t | t2 t1 | 1 1 0 . Il valore di questo parametro
(nell’esempio 1) decrementato di 1 sarà dunque il valore di t.
Con 1, dunque, stimeremo la varianza campionaria.
In questo caso, con i dati dell’esempio guida, si ottiene:
ˆ yy (0) ˆ yu (0) 207.16 57.24
ˆ
R
ˆ
ˆ
(
0
)
(
0
)
57.24
17.03
uy
uu
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Stima non parametrica
Il passo successivo della stima non parametrica è l’analisi spettrale
diretta.
Un primo strumento per stimare lo spettro in questo modo è il
periodogramma. A partire dai dati in esame, coi comandi
>> [Pyy,w] = periodogram(uscita(1:1024));
>> plot(w,Pyy)
viene calcolato e graficato il periodogramma a partire da 1024
campioni dell’uscita del sistema. Dato che, numericamente, il calcolo
del periodogramma si basa sulla Fast Fourier Transform (FFT), per
ottimizzare l’algoritmo è consigliabile utilizzare un numero di
campioni che sia una potenza di 2.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Stima non parametrica
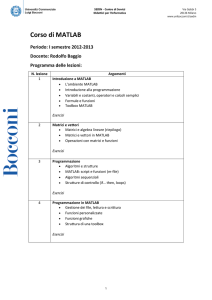
In questa figura si
vede il grafico del
periodogramma
calcolato su 1024
campioni dell’uscita
del processo. La
densità spettrale di
potenza stimata viene
graficata come
funzione delle
frequenze w, la cui
unità di misura, in
Matlab, è
[rad/sample].
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Stima non parametrica
Com’è noto, la stima dello spettro via periodogramma soffre di diversi
problemi, da cui deriva l’estrema irregolarità del grafico.
Uno dei rimedi più noti per ottenere stime più regolari dello spettro è utilizzare
il metodo di Bartlett, ovvero suddividere i dati in diverse sottosequenze,
calcolare il periodogramma di ognuna di esse, e ricavare la stima globale dello
spettro come media di questi nuovi periodogrammi.
Ciò si ottiene, in Matlab, con il comando:
>> [Pyy,w]= pwelch(uscita(1:1024),bartlett(256),0);
dove bartlett(256) indica che il tipo di finestra scelta è quella di bartlett (molte
altre sono disponibili, ognuna ha delle caratteristiche peculiari che non
discuteremo in questa sede) e che i campioni in ogni sottosequenza sono 256;
0 è il parametro con cui scegliere il numero di campioni di overlap. Il valore 0
indica che non si utilizzano finestre parzialmente sovrapposte.
Matlab offre molte altre funzioni per la stima non parametrica della densità
spettrale di potenza (per una panoramica esaustiva si rimanda alla System
Identification Toolbox User’s Guide).
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Stima non parametrica
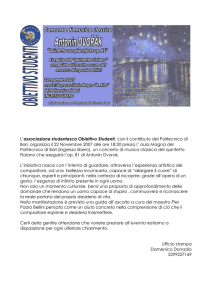
In questa figura
si vede il
periodogramma
stimato col
metodo di
Bartlett, con 4
sottosequenze da
256 dati l’una.
Si può
apprezzare la
riduzione delle
fluttuazioni.
Aumentando il
numero delle
sottosequenze il
diagramma è via
via più regolare.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Stima non parametrica
della risposta in frequenza
Matlab consente anche la stima della risposta in frequenza del sistema a
partire dai dati. Con la funzione spa : >>g = spa (data)
dove data è un vettore che contiene campioni di una realizzazione del
processo in esame, si ottiene in output g, che contiene tale stima:
j
ˆ
G (e )
Le frequenze cui viene calcolata la stima sono fissate di default ai valori
w = [1:128]/128*pi/Ts, dove Ts è il tempo di campionamento (1 nel
contesto in esame), ma possono essere anche scelte dall’utente (nel qual
caso dovranno essere passate come ulteriore parametro alla funzione spa).
Con il comando >> bode (g)
si ottiene il diagramma di Bode di modulo e fase della risposta in frequenza
stimata.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Stima parametrica
Passiamo ora ad analizzare le tecniche di identificazione parametrica, ovvero i
metodi di identificazione che mirano a descrivere il meccanismo di
generazione dati ignoto mediante un modello di una data famiglia (MA,
AR(X), ARMA(X), ecc.).
Cominciamo ad analizzare la procedura per la stima di un modello AR(n):
>> modello = ar (data , n, metodo)
dove: data è un oggetto iddata che contiene i campioni di ingresso e uscita;
n
è l’ordine del modello;
metodo permette di scegliere l’algoritmo da utilizzare. Le opzioni più
comuni sono ‘ls’, ovvero il metodo dei Minimi Quadrati , e ‘yw’
che, per trovare la stima, risolve le equazioni di Yule Walker a
partire dal calcolo delle funzioni di covarianza campionarie.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Stima parametrica
Per la stima di modelli MA e ARMA(X), si utilizza la funzione:
>> modello = armax(dati,'na',na,'nb',nb,'nc',nc,'nk',nk)
in cui i parametri sono quelli del modello teorico:
A( z ) y(t ) B( z)u(t nk ) C ( z)e(t )
Con un’opportuna scelta degli ordini delle diverse parti (AR, MA, X),
si possono descrivere modelli AR,MA,ARMAX degli ordini desiderati.
La procedura di stima si basa sull’algoritmo della Massima
Verosimiglianza (MLE).
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Scelta del modello ottimo e sua
validazione
In base alle funzioni viste nella precedente sezione, procederemo ora a
stimare diversi modelli per descrivere i dati dell’esempio. Si tratterà poi di
scegliere il modello ottimo, sia dal punto di vista della complessità sia dal
punto di vista della famiglia di modelli. Si sappia che i dati utilizzati
nell’esempio sono stati generati da un AR(3).
Stimiamo 4 diversi modelli: un AR(1), un AR(3), un MA(3) ed un
ARMA(1,2):
>>m1=ar(uscita, 1, ‘ls’);
>>m2=ar(uscita, 3, ‘ls’);
>>m3=armax(uscita, ‘na’,0,’nc’,3 );
>>m4=armax(uscita, ‘na’,1,’nc’,2);
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Scelta del modello ottimo e sua
validazione
Prima di tutto occorre comprendere quale sia la famiglia di modelli cui
è più probabile appartenga il meccanismo di generazione dati.
Per far ciò, analizziamo l’errore di predizione, sapendo che il caso
ottimo è quello in cui l’errore di predizione è un rumore bianco.
A tal fine, utilizziamo una particolare funzione Matlab:
>> resid(m1,uscita)
>> resid(m2,uscita)
>> resid(m3,uscita)
>> resid(m4,uscita)
Tale funzione calcola l’errore di predizione commesso dal predittore
associato al modello e ne valuta la funzione di autocorrelazione. Il
grafico mostra i valori di tale funzione rispetto ad un intervallo di
confidenza del 99%. Se l’errore è bianco, pertanto, ci aspettiamo che
tutti i valori della funzione di autocorrelazione, ad eccezione
ovviamente del primo, siano nulli, o comunque sufficientemente
piccoli da restare all’interno dell’intervallo di confidenza.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Scelta del modello ottimo e sua
validazione
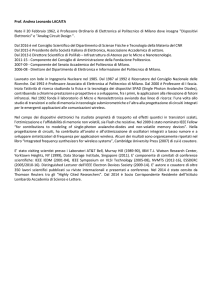
La figura mostra
l’analisi dei residui
prima descritta nel
caso del modello
AR(1). Come si vede
l’errore di predizione
non è bianco,
coerentemente col
fatto che il
meccanismo di
generazione dati reale
è un AR(3).
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Scelta del modello ottimo e sua
validazione
La figura mostra
l’analisi dei residui
prima descritta nel caso
del modello MA(3).
Come si vede l’errore di
predizione non è bianco,
coerentemente col fatto
che il meccanismo di
generazione dati reale è
un AR(3).
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Scelta del modello ottimo e sua
validazione
La figura mostra
l’analisi dei residui
prima descritta nel
caso del modello
ARMA(1,2). Come si
vede l’errore di
predizione non è
bianco, coerentemente
col fatto che il
meccanismo di
generazione dati reale
è un AR(3).
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Scelta del modello ottimo e sua
validazione
La figura mostra
l’analisi dei residui
prima descritta nel
caso del modello
AR(3). Come si vede
l’errore di predizione
in questo caso è
bianco (si vede che
l’unico campione
della funzione di
autocorrelazione
diverso da zero è il
primo),
coerentemente col
fatto che il
meccanismo di
generazione dati reale
è proprio un AR(3).
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Scelta del modello ottimo e sua
validazione
Una volta individuata la famiglia di modelli, nel nostro caso AR(n),
occorre determinare la complessità ottima. Esaminiamo le funzioni
Matlab che consentono questa analisi, applicandole ai modelli della
famiglia AR con ordine n = 1 ,...,10.
Per fare ciò utilizziamo i criteri noti, ovvero il Final Prediction Error
(FPE) e l’Akaike Information Criterion (AIC).
I comandi Matlab >> aic(modello)
>>fpe (modello)
consentono di calcolare i valori di tali indici per il modello identificato.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Scelta del modello ottimo e sua
validazione
La figura
mostra
l’andamento di
FPE al variare
dell’ordine.
Coerentemente
con quanto ci si
aspetta, l’ordine
che ottimizza
questo criterio
nel caso
dell’esempio
guida è n =3.
- IMAD - Politecnico di Milano:
System Identification Toolbox di
Algoritmi di identificazione ricorsivi
e con oblio
Spesso, per ottimizzare i tempi di calcolo, è opportuno utilizzare algoritmi
ricorsivi per l’identificazione, ad esempio il Recursive Least Square
Algorithm (RLS). Allo stesso modo, spesso si vuole poter agire sul peso
relativo dei dati, attribuendo importanza minore ai dati lontani nel tempo. Ciò
si realizza introducendo il coefficiente d’oblio.
Matlab offre la possibilità di scegliere questa strada. Per esempio:
>> [est,yhat] = rarx (uscita(1:length(uscita)/2),[3],’ff’,0.98 );
fornisce una stima dei parametri di un modello AR(3), costruito a partire dalla
prima metà dei dati utilizzando l’algoritmo RLS. In questo caso si è usata
l’opzione ‘ff’ (leggi: forgetting factor), che utilizza un coefficiente di oblio,
fissato, in questo caso, a 0.98.
Gli output di questa funzione sono est, che è una matrice la cui k-esima riga
contiene i parametri stimati al tempo k (ovvero stimati in base ai dati fino al kesimo incluso); yhat è il vettore che contiene la predizione dell’uscita secondo
il modello stimato. Si può valutarne la bontà analizzando l’errore di tale
predizione sulla seconda metà dei dati (non utilizzati nella stima del modello).
- IMAD - Politecnico di Milano:
System Identification Toolbox di
L’interfaccia grafica
Per concludere questa breve panoramica sul System Identification
Toolbox, introduciamo la GUI che questo tool offre.
Per aprirla occorre scrivere al prompt
>> ident
Questa è
l’interfaccia
che si
presenta
all’utente
- IMAD - Politecnico di Milano:
System Identification Toolbox di
L’interfaccia grafica
Per analizzare i dati occorre importarli: il menù a tendina Data consente
di importare i dati dal Workspace di Matlab.
E’ offerta all’utente la possibilità di pretrattare i dati importati, secondo le
modalità indicate nel menù posto sotto alla scritta Operations (si possono
rimuovere i trend, selezionare solo alcune variabili da analizzare,
effettuare dei prefiltraggi, ecc.).
Dopo aver scelto i dati da analizzare si possono costruire delle stime sia
parametriche sia non parametriche, come specificato nelle opzioni del
menù a tendina Estimate
E’ possibile, inoltre, importare dei modelli creati precedentemente in
Matlab (mediante l’opzione import del menù Models ).
- IMAD - Politecnico di Milano:
System Identification Toolbox di
L’interfaccia grafica
Scegliendo l’opzione di identificazione parametrica, per esempio, si
apre una finestra di dialogo in cui scegliere il tipo di modello e il suo
ordine:
- IMAD - Politecnico di Milano:
System Identification Toolbox di
L’interfaccia grafica
Una volta creati i modelli, essi vengono visualizzati nei riquadri sotto
la scritta Models. Selezionando una delle caselle sotto la scritta Model
Views si possono valutare e confrontare le caratteristiche dei diversi
modelli (analizzare gli errori di predizione, valutare la risposta
all’impulso e allo scalino dei vari modelli, le risposte in frequenza dei
modelli stimati, ecc.)
Dunque questa interfaccia è uno strumento utile ed intuitivo per la fase
iniziale di analisi in una procedura reale di indentificazione. E’ ovvio,
peraltro, che ogni singolo problema avrà delle peculiarità che, quasi
sempre, richiederanno un’analisi studiata ad hoc, per la quale sarà
necessario creare nuove funzioni Matlab che sfruttino le potenzialità
del Toolbox ma siano orientate alla specifica applicazione.
- IMAD - Politecnico di Milano:
System Identification Toolbox di