Parte II (I Trasduttori)
I sensori di movimento
•Molte
grandezze
(pressione,
temperatura, forza, accelerazione, etc.)
vengono
trasformate
in
uno
spostamento, prima di essere convertite
in un segnale elettrico.
Parte II (I Trasduttori)
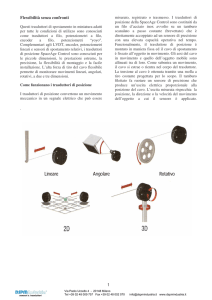
I potenziometri
•Un potenziometro è costituito da un
elemento resistivo su cui può scorrere un
contatto mobile. Il moto della parte
mobile può essere traslatorio, rotatorio o
elicoidale.
• L’elemento resistivo viene alimentato
con una tensione, continua o alternata
(sensore passivo).
• In condizioni ideali l’uscita è una
funzione lineare dell’ingresso.
Parte II (I Trasduttori)
I potenziometri
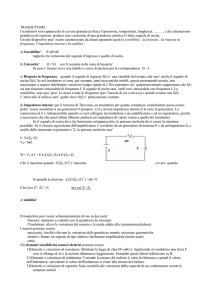
La presenza del carico produce degli
effetti di non linearità sull’uscita:
eo
1
eex 1 R p xi
1
xi Rm xt
xt
che in condizioni ideali diventa:
eo xi
eex xt
Per avere un comportamento lineare
occorre
che
la
resistenza
del
potenziometro sia piccola relativamente
a quella del dispositivo utilizzatore!
Questa specifica, tuttavia è
in
contrasto
con
la
possibilità di avere un
elevata sensibilità!
Parte II (I Trasduttori)
I potenziometri
•I potenziometri a filo presentano una
variazione di resistenza continua, ma
hanno valori di sensibilità troppo bassi.
•Non è possibile diminuire la sezione del
filo, per aumentare la resistenza, si
ricorre allora ai potenziometri a filo
avvolto.
•L’altra classe dei potenziometri è
costituita dai potenziometri in cermet ed
in plastica conduttiva
I potenziometri del secondo
tipo hanno una risoluzione
infinitesima, ma presentano
un’uscita molto rumorosa, a
causa della rugosità della
superficie
Parte II (I Trasduttori)
I potenziometri
•I vengono immessi sul mercato come
dispositivi lineari (tranne che non si
vogliano realizzare particolari funzioni). Il
valore della loro linearità corrisponde
pertanto anche alla loro accuratezza.
Quando richiesto è possibile migliorare
la linearità di tali dispositivi mediante
inserimento di opportune resistenze
(potenziometri
a
filo
avvolto)
o
mediante
processi
al
laser
(potenziometri a strato).
Nel caso di dispositivi che
devono funzionare in ambienti
ostili viene dichiarata anche la
dither life. Essa indica la
capacità del dispositivo a
resistere a un numero grande
di cicli di piccola ampiezza
Parte II (I Trasduttori)
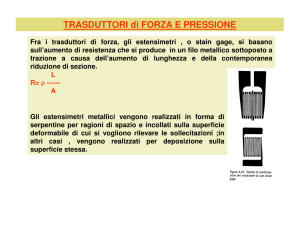
Gli estensimetri
Gli estensimetri o strain gage si basano
sul fenomeno della variazione della
resistenza di un filo conduttore con la
deformazione dello stesso:
dR / R
d /
Gage factor
1 2
dL / L
dL / L
Gli estensimetri vengono utilizzati in due
campi:
•studio dello stato di carico di pari
meccaniche
•costruzione di trasduttori
coppia, pressione, etc.
di
forza,
Si possono avere vari tipi di
estensimetro:
• a filo non incollato o incollato
• a foglio metallico
•a semiconduttore.
Parte II (I Trasduttori)
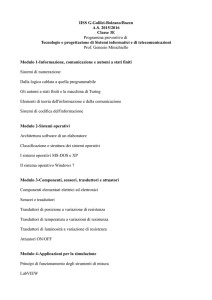
Gli estensimetri
Gli estensimetri a foglio metallico
vengono costruiti direttamente nella
forma desiderata e vengono incollati al
dispositivo da analizzare con opportuni
collanti.
Quando richiesto si ricorre a opportune
rosette di estensimetri.
Gli estensimetri metallici sono molto
lineari ma presentano un gage factor di
valore molto basso (da 2 a 4)
Parte II (I Trasduttori)
Gli estensimetri
Gli estensimetri a film metallico depositato non
hanno bisogno del collante, ma vengono
depositati direttamente sulla superficie di un
organo deformabile (servono in genere per
costruire trasduttori di altre grandezze.)
Gli estensimetri a semiconduttore possono essere
sia incollati sia diffusi.
In entrambi i casi possono essere di tipo N o P.
Nel primo caso la resistenza aumenta con lo
stress nel secondo caso diminuisce.
Presentano il notevole vantaggio di avere un
gage factor molto elevato (fino a 150). Dovuto
principalmente
all’effetto
piezoresistivo
e
vengono detti trasduttori piezoresistivi.
Putroppo presentano elevata
temperatura e non linearità.
senibilità
alla
Parte II (I Trasduttori)
Gli estensimetri
Si consideri uno strain gage di tipo
metallico (con gage factor G=2.0) di
valore R=120 Ohm che deve misurare lo
stato deformativo di un organo di
acciaio (modulo di Young Y=210 Gpa).
Si ha:
l
8 106
3.8 10 5
l
Y 210 10 9
R
l
G
R
l
l
R G
R 2 ( 3.8 10 5 ) 120 9 10 3
l
Parte II (I Trasduttori)
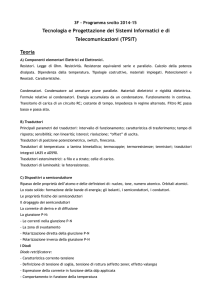
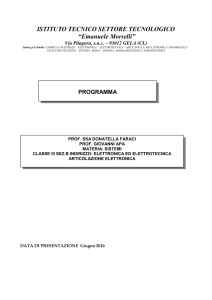
I trasformatori differenziali
I trasformatori differenziali (LVDT) sono
costituiti da un avvolgimento primario e
due avvolgimenti secondari.
•Il primario è eccitato con una tensione
di tipo sinusoidale, con frequenza
variabile tra 60 e 20.000 Hz.
•Sui secondari vengono indotte due
tensioni di ampiezza variabile con la
posizione del nucleo.
•Connettendo i due secondari in
antiparallelo, l’ampiezza del segnale
d’uscita diventa una funzione lineare
della posizione del nucleo.
Parte II (I Trasduttori)
I trasformatori differenziali
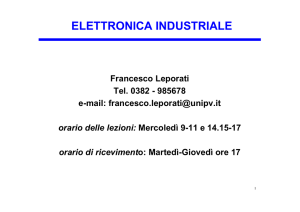
•L’uscita del sensore è una sinusoide
modulata in ampiezza. Per ricavare
l’informazione in uscita si può, a
seconda dei casi:
utilizzare un voltmetro per AC;
demodulare il segnale e utilizzare un
voltmetro in DC, o un oscilloscopio
(insieme ad eventuali filtri passabasso).
Parte II (I Trasduttori)
I trasformatori differenziali
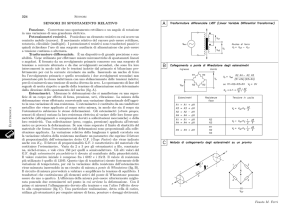
•Se la frequenza della portante è
grande rispetto alla massima frequenza
del segnale (valore tipico è il rapporto
10:1) possono bastare dei filtri RC,
semplici o multipli.
Parte II (I Trasduttori)
I trasformatori differenziali
Si supponga di voler misurare uno
spostamento il cui contenuto in
frequenza
risulta
trascurabile
a
frequenze superiori a 1000 Hz, utilizando
un LVDT con tensione di eccitazione a
frequenza di 10.000 Hz. Il processo di
modulazione
e
successiva
demodulazione produrrà dei segnali a
frequenze nel’intervallo [19.000 Hz,
21.000Hz].
Si vuole che il ripple residuo alla
frequenza di 19.000 Hz sia minore del 5%.
Deve allora essere:
0.05
1
19000 6.28 1
2
f 0,00017 s
f
Parte II (I Trasduttori)
I trasformatori differenziali
Alla frequenza di 1000 Hz tale filtro
produce un’attenuazione pari a 0,68 e
uno sfasamento pari a -47°. Si ha quindi
una distorsioe eccessiva del segnale.
Si possono migliorare le prestazioni del
filtro utilizzando una cella RC doppia:
1
0.05
2
19000 6.28 f 1
f 0,000037 s
In questo caso alla frequenza di 1000 Hz
si ha un’attenuazione di 0,94 e uno
sfasamento di -26°. In tali condizioni si
ottiene in uscita un segnale che è una
copia fedele e ritardata del segnale in
ingresso
(cfr
condizioni
di
non
distorsione):
/ 180
26
tr
2f
180 2 1000
72 s