Lezione introduttiva su:
Fluidi ideali
(Ing. E. Foti)
Fluidi ideali:
sommario della lezione
1. Premessa
2. Formulazione del problema
2.1 Il teorema di Kelvin
2.1.1 Fluido ideale in moto irrotazionale e rotazionale
3. Soluzioni dell’equazione di Eulero
3.1 Soluzione per moti rotazionali in moto permanente: ovvero
(1)
il teorema di Bernoulli in piccolo
3.1.1 Il teorema di Bernoulli “in piccolo” nella pratica
idraulica
3.1.2 Significato energetico del teorema di Bernoulli
3.1.3 Potenza di una corrente. Estensione del teorema
di Bernoulli ad una corrente
3.2 Soluzione per moti irrotazionali: ovvero il teorema di
(1)
Bernoulli in grande
3.2.1 Il teorema di Bernoulli “in grande” nella pratica
idraulica
4. Moti Irrotazionali piani
4.1 Potenziale delle velocità ed equazione di Laplace
4.2 Applicazioni di variabili complesse
4.3 Le trasformazioni conformi
(1)L. de Lagrange, “Mechanique analytique”; (1788).
1. Premessa
Il moto di un fluido che occupa la regione V(t) racchiusa dalla superficie S(t) è usualmente
affrontato ipotizzando che le caratteristiche macroscopiche valutabili sperimentalmente
siano funzioni continue dello spazio e del tempo.
Ciò implica che il processo di movimento risulta individuato e predicibile una volta che le
funzioni r(x,t), v(x,t), p(x,t) e T(x,t), rispettivamente significative della distribuzione di
densità, velocità, pressione e temperatura, siano note al variare del tempo in tutta la regione
fluida interessata dal processo di movimento.
La descrizione appena data di movimento è quella che usualmente viene definita euleriana
(anche se, in realtà, fu J.R. d’Alembert, nel 1752, ad introdurla per primo(1)), in cui tutte le
grandezze significative, riferite ad un sistema di riferimento fisso, vengono individuate nel
tempo attraverso equazioni differenziali(2). Tale descrizione si contrappone a quella della
meccanica classica in cui le variabili indipendenti risultano essere, oltre al tempo (t), le
coordinate che all’istante iniziale individuano la particella materiale di cui si vuol seguire
l’evoluzione per tutto il processo di movimento
(1)J.le R. d’Alembert, “Essai d’une nouvelle theorie de la résistence des fluides” (1752). Memoria presentata
all’Accademia di Berlino nel dicembre del 1749.
(2)L. Euler, “Principia motus fluidorum”.
1. Premessa
In particolari condizioni, invero assai frequenti nella realtà, specialmente se il fluido
considerato sia l’aria o l’acqua, entrambi caratterizzati da un bassissimo valore della
viscosità cinematica m , risulta utile trascurare nel processo di moto gli effetti legati
r
porre
m=0).
alla viscosità (ciò significa
Tale modello di fluido, detto ideale, per il quale risultano nulle sia le tensioni tangenziali,
sia la parte non isotropica delle tensioni normali, rappresenta uno schema concettuale di
grande utilità dal momento che esso introduce notevoli semplificazioni nelle equazioni del
moto.
E’ chiaro come nella realtà fisica il moto di un fluido non sia mai “veramente” ideale.
Tuttavia lo schema logico di fluido ideale assume rilevanza poiché in molti casi, alcuni dei
quali sono di seguito descritti, gli effetti viscosi sono trascurabili. Ciò avviene ad esempio,
quando il numero di Reynolds caratteristico del processo di moto risulta sufficientemente
elevato. In altre parole, se Re>>1, le azioni viscose possono ritenersi trascurabili in tutto il
campo di moto (tranne che in quelle regioni prossime a contorni solidi in cui i gradienti di
velocità sono rilevanti)
2. Formulazione del problema
Sulla base delle considerazioni prima esposte, l’equazione del moto nel caso di fluidi ideali
risulta essere la seguente:
dv
r f p (equazione di Eulero)
dt
Cui va associata l’equazione di continuità che, nel caso più generale si può porre come
segue:
dr
dt
r v 0
Vediamo quali considerazioni di carattere generale possono trarsi da essa. Si particolarizzi
il campo di forze di massa come campo conservativo (es. campo gravitazionale) per cui è
lecito porre: f
Ne segue allora che l’equazione di Eulero, nell’ipotesi di fluido incomprimibile, si riduce
alla seguente:
dv
1
p
dt
r
Quest’ultima pone chiaramente in evidenza come, nel caso di fluidi ideali e forze di massa
conservative, l’accelerazione sia derivabile da un potenziale scalare.
2. Formulazione del problema
Questo risultato è anche estendibile al caso di fluido comprimibile (barotropico) ideale,
posto infatti r= r(p) si ricava:
dv
dp
dt
r
Attenzione: la presenza di un potenziale scalare univoco per il campo delle accelerazioni
non implica che il moto sia irrotazionale. In altre parole, il moto di un fluido ideale può
essere sia rotazionale che irrotazionale.
2.1 Il teorema di Kelvin
Sulla base dell’ultima espressione mostrata, si può osservare che, indipendentemente dalla
irrotazionalità del moto, per un fluido ideale immerso in un campo di forze conservative la
circolazione G della velocità lungo una qualsiasi curva riducibile C in moto con il fluido si
mantiene costante nel tempo. Infatti, definendo la circolazione G nella forma:
G vd x
C
Si ha che:
dG d
dv
d d x
vd x
d x v
C dt
C
dt dt C
dt
1
p r d x v d v
rC
C
v2
p r d x d
C
rC
2
1
v2
1
dp d d
C
2
r
Per cui, se r è una funzione monodroma di p ed il campo di forze di massa è costante
(g=costante) allora la funzione integranda esprime un differenziale esatto e quindi
dfˆ 0 G costante
C
2.1 Il teorema di kelvin
Esaminiamo alcune conseguenze del teorema di Kelvin.
Nel caso di irrotazionalità dal moto di un fluido ideale, il teorema di Kelvin sancisce
la persistenza di tale condizione. Per chiarire questo concetto basta ricorrere al
teorema di Stokes che, come è noto, assicura la seguente uguaglianza:
G v d x v ndA
C
A
Con n normale alla superficie A racchiusa da C.
ricordando inoltre che la vorticità è definita come: w v
Se ne ricava subito l’affermazione prima fatta. Il teorema di Stokes infatti impone sul
piano fisico l’uguaglianza tra la circolazione della velocità lungo una qualsiasi curva
riducibile C immersa nel dominio fluido ed il flusso di vorticità attraverso una
qualsiasi superficie A da essa delimitata. In altre parole, G uguaglia l’intensità del tubo
vorticoso formato da tutte le linee di vorticità (linee a tangente parallela al vettore
vorticità locale) che si appoggiano alla curva C.
Se il moto è irrotazionale (w=0) la circolazione risulta nulla lungo tutte le curve
riducibili immerse nel campo di moto. Inoltre, per il teorema di Kelvin, se tale
circostanza è verificata all’istante iniziale, essa risulterà verificata in tutti gli istanti
successivi.
2.1.1 Fluido ideale in moto irrotazionale e rotazionale
Riassumendo, per un fluido ideale:
(i)
Se il moto è irrotazionale (w=0) esso resta tale nel tempo ed inoltre G risulta nulla
lungo tutte le linee riducibili immerse nel campo di moto
(ii) Se il moto è rotazionale (w0) l’evoluzione della vorticità è descritta dall’equazione
seguente:
w
v w w v 0
t
quest’ultima mostra che, nell’ipotesi di densità uniforme, la dinamica della vorticità
non è influenzata né dal campo delle pressioni, né dalle forze di massa (supposte
conservative). Essa risulta invece descritta da un bilancio tra variazione locale,
convezione di vorticità da parte del fluido per effetto della disuniforme distribuzione
di w oltre ad un termine (w v) che tiene conto della distorsione o dilatazione delle
linee di vorticità per effetto del gradiente di velocità.
Nel caso di moto rotazionale, il teorema di Kelvin implica che nei fluidi ideali i tubi
vorticosi sono permanenti, cioè si muovono con il fluido e mantengono intensità
costante.
2.1.1 Fluido ideale in moto irrotazionale e rotazionale
In un fluido a densità costante soggetto a un campo di forze conservativo, la vorticità
non può essere generata all’interno della massa fluida.
w
v w w v 0
t
w
w
Se generata, la vorticità si intensifica o si attenua per effetto del termine w v
e viene trascinata dal fluido per effetto dei termini convettivi v w
3. Soluzioni dell’equazione di Eulero
Vediamo innanzitutto di derivare un importante risultato che vale in tale ambito: il
teorema di Bernoulli. Si consideri l’equazione di Eulero per fluidi barotropici:
Ovvero:
dv
dp
dt
r
v
dp
v v ( ) 0
t
r
Poiché vale l’identità vettoriale:
Si può ricavare:
Ponendo:
Si ricava quindi:
v2
v ( v) v w
2
v
dp v 2
v w ( ) 0
t
r 2
2
dp v
~
H ( )
r 2
v
~
H v w
t
3. Soluzioni dell’equazione di Eulero
Il risultato appena ricavato, ovverosia:
v
~
H v w
t
suggerì a Lagrange due diverse soluzioni, che verranno presentate nel prosieguo,
ottenute nelle ipotesi di:
w 0;
v
0
t
w 0
Teorema di Bernoulli
in piccolo
Teorema di Bernoulli
in grande
3.1 Soluzione per moti rotazionali in moto permanente: ovvero il teorema di
Bernoulli in piccolo
L’equazione di Eulero scritta nell’ipotesi di forze di massa conservative e di fluido a
~
comportamento al più barotropico e avendo introdotto la grandezza H, può porsi nella
forma:
v
~
H v w
t
Se si introducono le ipotesi di:
moto permanente;
(i.e.
v
0)
t
moto rotazionale;
~
Si ricava: H v w . Tuttavia, poiché il vettore ( v w ) è un vettore che risulta
~
ortogonale sia a v che a w, ne segue che H si mantiene costante sia lungo le linee di
corrente che lungo le linee di vorticità (su dette linee infatti, v w 0 ).
H è costante sulle linee di corrente (che coincidono con le traiettorie nell’ipotesi
introdotta di moto permanente) e sulle linee di vorticità.
Questo è il teorema di Bernoulli in piccolo!
3.1.1 Il teorema di Bernoulli “in piccolo” nella pratica idraulica
Nelle ipotesi di:
fluido perfetto (m=0);
fluido pesante (forze di massa dovute al campo gravitazionale per cui
f=-g grad(z) );
fluido incomprimibile (r=costante);
moto permanente (
v
0 );
t
Si ricava:
v2
H z
costante
2g
p
Sulle linee di corrente (che coincidono con
le traiettorie poiché il moto è stazionario)
La grandezza H è detta carico totale. Ad essa può essere attribuito sia un significato
geometrico, sia un significato energetico.
3.1.2 Significato energetico del teorema di Bernoulli
Al teorema di Bernoulli può essere attribuito un preciso significato energetico che ne
costituisce l’essenza e l’importanza. Si può infatti dimostrare che il carico totale H
rappresenta l’energia meccanica totale per unità di peso del fluido in movimento.
Consideriamo separatamente i tre addendi del trinomio:
v2
H z
costante
2g
p
La quota geodetica rappresenta, ovviamente, quella parte dell’energia
potenziale che compete all’unità di peso del fluido per il fatto che essa
occupa una ben determinata posizione nel campo gravitazionale. Infatti,
spostandosi lungo la verticale, cioè lungo la linea di forza, dalla quota z
alla quota zero essa potrebbe compiere un lavoro pari a z*1=z.
Possiamo quindi indicare questa energia come energia posizionale.
Il termine v2/2g rappresenta l’energia cinetica dell’unità di peso di
fluido per il fatto che è animata da velocità. Basta ricordare che la
massa dell’unità di peso vale 1/g. L’energia specifica è dunque:
1
1 1 2 v2
2
mv
v
2
2g
2g
3.1.2 Significato energetico del teorema di Bernoulli
L’interpretazione dell’altezza piezometrica come termine energetico
può essere fatta discendere dall’esempio seguente.
Nel recipiente illustrato in figura contenente liquido in quiete, si isoli
idealmente un volume infinitesimo dw affondato di h rispetto allo
specchio liquido. Esso è soggetto ad una pressione pari a p=h
p / h
dS
dw
Per il teorema di Archimede, le forze ad esso applicate, cioè al forza
peso e la spinta idrostatica, si fanno equilibrio.
3.1.2 Significato energetico del teorema di Bernoulli
Se ora pensiamo di trasferire questo volume dw in prossimità del pelo
libero, ovviamente non si compie alcun lavoro poiché stiamo stiamo
spostando un sistema a risultante nullo.
h
Per contro, a spostamento
avvenuto, ci si può rendere
conto che la sua energia
posizionale è aumentata di
hdw: deve quindi essere
diminuita un’altra forma di
energia anch’essa di tipo
potenziale
giacché
sia
all’inizio che alla fine
dell’operazione il liquido è in
quiete. Dal che il solo
mutamento avvenuto riguarda
la pressione (da p a zero).
Sembra lecito concludere che l’acquisto di energia posizionale sia
avvenuto a spese di un’energia legata alla pressione. Detta energia deve
essere diminuita per l’unità di peso di h=p/. Designeremo questa
energia come energia di pressione.
3.1.3 Potenza di una correntge in una sezione.
Estensione del teorema di Bernoulli a una corrente
Il significato energetico che può essere attribuito al teorema di Bernoulli lo ricollega al
concetto di potenza: anzi, attraverso questo concetto si può giungere all’estensione del
teorema di Bernoulli alle correnti di sezione finita.
Definiamo come potenza di una corrente in una generica sezione trasversale
l’energia che la corrente fa passare attraverso quella sezione nell’unità di
tempo.
Si consideri un tubo di flusso di sezione infinitesima dA, sia:
dQ v dA
la portata del tubo di flusso e sia inoltre H il carico totale. Detta dP la potenza
del filetto di corrente nella sezione, si ha allora per definizione:
dP ( dQ) H
[ peso /(unità di tempo)] [energia/(unità di peso)]
Per passare alla corrente di sezione finita basta integrare all’intera sezione
sezione trasversale:
p v2
P HdQ z v dA
Q
A
2g
3.1.3 Potenza di una corrente in una sezione.
Estensione del teorema di Bernoulli a una corrente
Nell’ipotesi di validità del teorema di Bernoulli (fluido perfetto, pesante, incomprimibile in
moto permanente) sia il carico H che la portata dQ restano costanti per ognuno dei tubi di
flusso elementari che costituiscono l’intera corrente.
Ne segue che anche P resta costante. Si può quindi concludere che: nel moto permanente di
un fluido perfetto, pesante e incomprimibile la potenza si mantiene costante in tutte le
sezioni trasversali.
Ad una espressione analoga a quella che è stata prima mostrata per una traiettoria si può
pervenire per il caso delle correnti gradualmente variate caratterizzate, cioè, da una
distribuzione idrostatica della pressione nelle singole sezioni trasversali. Per questa
proprietà, infatti, separando la potenza cinetica da quella potenziale, è possibile scrivere:
p
p
v2
P z v dA v dA z Q Pc
A
A 2g
La Pc dipende dalla distribuzione della velocità nella sezione trasversale che, nella maggior
parte dei casi di interesse pratico, nota solo per via sperimentale. Tuttavia si può giungere
ad una sua espressione in termini finiti ricorrendo all’artificio di introdurre un coefficiente
di ragguaglio a. Lo diremo coefficiente di ragguaglio per le potenze cinetiche.
3.1.3 Potenza di una corrente in una sezione.
Estensione del teorema di Bernoulli a una corrente
Il coefficiente di ragguaglio a è definito come rapporto tra la potenza cinetica effettiva della
corrente e la potenza cinetica di una corrente fittizia di pari portata ma che avesse una
distribuzione uniforme della velocità nella sezione trasversale:
v2
v dA
A 2g
a
V 2
VA
2g
V2
Essendo V la velocità media. Si ottiene quindi: Pc a 2 g Q
e pertanto:
p
V2
P z a
Q HQ
2g
Avendo indicato con H il trinomio:
V2
H z a
2g
p
Che rappresenta l’energia specifica media del fluido che attraversa la sezione. Per la
costanza di H e di Q lungo la corrente, ilo teorema di Bernoulli può dunque scriversi nella
forma:
2
p
V
H z a
costante
2g
3.2 Soluzione per moti irrotazionali: ovvero il teorema di Bernoulli in grande
Ancora una volta partiamo dall’equazione di Eulero scritta nell’ipotesi di forze di massa
conservative e di fluido a comportamento al più barotropico, ovvero partiamo dalla
seguente relazione:
dv
dp
dt
r
Ovvero, come già visto,:
v
dp
v v ( ) 0
t
r
Utilizziamo ancora una volta l’identità vettoriale seguente:
v2
v ( v) v w
2
Se adesso si introduce l’ipotesi di:
moto irrotazionale (w=0);
Ciò postula l’esistenza di una funzione F detta “potenziale delle velocità” tale che
v F
3.2 Soluzione per moti irrotazionali: ovvero il teorema di Bernoulli in grande
Inoltre, se il dominio risulta semplicemente connesso, allora G=0 (per il teorema di kelvin)
e quindi la funzione F è monodroma e dipende solo dai vettori che ne caratterizzano la
posizione iniziale e quella finale per cui:
x
F ( x) F ( x o ) v d x
Cioè, appunto: v F
seguente risultato:
Ossia:
xo
che sostituita nell’equazione di Eulero, permette di ricavare il
v
v2
dp
v w ( ) 0
t
2
r
v 2 F
dp
w 0;
0
( )
2 t
r
v F
dp
v 2 F
( )
F (t )
r
2 t
Con F(t) funzione arbitraria del tempo la cui forma risulta irrilevante ai fini della
risoluzione del problema della determinazione del campo di moto, poiché è sempre
possibile definire una nuova funzione potenziale delle velocità tale che:
~
~
F F Fdt F F
3.1 Soluzione per moti rotazionali in moto permanente: ovvero il teorema di
Bernoulli in grande
In definitiva quindi si ottiene:
~
v 2 F
( )
costante
r
2 t
dp
Questo quadrinomio è costante ovunque.
Questo è il teorema di Bernoulli in grande!
3.1.1 Il teorema di Bernoulli “in grande” nella pratica idraulica
Nelle ipotesi di:
fluido perfetto (m=0) in moto irrotazionale (w=0);
fluido pesante (forze di massa dovute al campo gravitazionale per cui
f=-g grad(z) );
fluido incomprimibile (r=costante);
moto permanente (
v
0 );
t
Dalla:
~
v 2 F
( )
costante
r
2 t
dp
v2
H z
costante
2g
p
Si noti che, in questo caso, il carico totale si mantiene costante in tutto il campo di moto!
4. Moti irrotazionali
L’oggetto di questo capitolo riguarda lo studio del campo di moto attorno a corpi di varia
forma. Il fluido sarà assunto privo di viscosità e incompressibile.
Sulla base del teorema di Kelvin si può affermate che il moto di un fluido ideale, al più
barotropico, che ha inizio dalla quiete (cioè da una situazione irrotazionale) permane
indefinitamente irrotazionale.
Un siffatto moto ideale presenta tuttavia una velocità non nulla in corrispondenza dei
contorni solidi. Di contro, un fluido viscoso, deve soddisfare la condizione di aderenza in
corrispondenza dei contorni solidi.
Quando il numero di Reynolds è sufficientemente elevato, il campo di moto attorno a
corpi immersi può però essere suddiviso in una regione esterna in cui il moto si assume
ideale e irrotazionale, e una regione interna, prossima ai contorni solidi, in cui la
diffusione viscosa e la vorticità sono elevate.
Il moto esterno può essere affrontato trascurando la presenza dello “strato limite” e
applicando la teoria dei moti irrotazionali di seguito presentata, una volta che il moto
“esterno” è risolto, il moto all’interno dello strato limite può essere risolto imponendo un
“matching” con la soluzione esterna.
4. Moti irrotazionali
Attenzione: un’importante eccezione a tale approccio è rappresentata dai campi di moto
attorno a corpi tozzi. In queste situazioni infatti, la forma del corpo
immerso genera la separazione del campo di moto all’interno dello strato
limite e gli effetti viscosi non risultano più confinati in uno strato sottile
prossimo al corpo. In siffatte situazioni, anche nel limite Re->, il campo di
moto reale differisce sensibilmente da quello ideale.
4.1 Potenziale delle velocità ed equazione di Laplace
L’equazione di continuità per un fluido incomprimibile, in due dimensioni, nella
forma:
u v
0
x y
Garantisce l’esistenza di una funzione di corrente y che consente di ricavare le
componenti di velocità secondo le identità:
u
y
y
; v
;
y
x
Allo stesso modo, la condizione di irrotazionalità postula l’esistenza della funzione
potenziale delle velocità che è correlata, in due dimensioni, al campo delle velocità dalle
relazioni:
F
F
u
x
; v
y
;
Dalle condizioni sopra riportate si ricava che la funzione di corrente e la funzione
potenziale sono tra loro correlate dalle condizioni di Cauchy-Riemann:
F y
x y ;
F y ;
y
x
4.1 Potenziale delle velocità ed equazione di Laplace
Le linee equipotenziali e le linee di corrente sono tra loro ortogonali. Infatti:
F y
y
F
F y i
j
j
i
x
y
x
y
F y F y
uv uv 0
x x y y
inoltre, le linee equipotenziali e le linee di corrente soddisfano le equazioni di Laplace:
2F 2F
F 2 2 0;
x
y
2
2y 2y
y 2 2 0
x
y
2
per quanto concerne le condizioni al contorno, esse possono essere di due tipi.
1) condizioni in corrispondenza dei contorni solidi: deve essere nulla la componente
normale della velocità;
F
U
2) condizioni all’infinito: usualmente si impongono condizioni del tipo:
x
4.2 Applicazioni di variabili complesse
Introduciamo la variabile complessa z tale che:
z x iy
Supponiamo inoltre di introdurre anche la variabile complessa w definita dalla seguente
relazione:
w F( x, y) iy ( x, y) f ( z )
Detta funzione è chiamata “potenziale complesso”. Dalla teoria delle funzioni di variabile
complessa, è noto come nel caso in cui una funzione di variabile complessa soddisfi alle
condizioni di Cauchy-Riemann, la sua derivata è unica,
nel senso che:
dw dz
è indipendente dalla direzione di derivazione con cui dz tende a zero nel piano xy.
Nella descrizione dei moti irrotazionali, la quantità
lim dw
dw
dz dz 0 dz
rappresenta un’importante quantità. Infatti, poiché essa è indipendente dall’orientamento di
dz, possiamo prendere dz parallelo all’asse x, ovvero
4.2 Applicazioni di variabili complesse
si ottiene quindi:
lim dw w
dw
F iy
dz dx 0 dx x x
ovvero, ricordando i legami tra funzione di corrente, funzione potenziale e campo di
velocità:
dw
u iv
dz
La derivata del potenziale complesso w rispetto a z è pertanto una quantità immaginaria la cui
parte reale e parte immaginaria forniscono le componenti del campo di velocità.
La conoscenza del potenziale complesso come funzione complessa della variabile z
consente dunque di determinare, attraverso una semplice operazione di derivazione, il
campo di velocità.
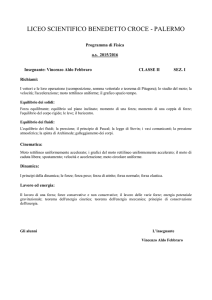
4.3 Le trasformazioni conformi
Fino ad ora si è mostrato come il campo di moto possa essere rappresentato anche nel
piano complesso. Tuttavia non è ancora chiara l’utilità di detta rappresentazione. L’utilità
della rappresentazione nel piano connesso è strettamente collegata alle trasformazioni
conformi.
Accanto al piano z=x+iy si introduca il piano z’=x’+iy. Si consideri inoltre la funzione
analitica z’=z’(z) che associa ad ogni punto del piano z un punto del piano z’.
Tale trasformazione si dice conforme perché conserva gli angoli, nel senso che se due linee
nel piano z si intersecano nel piano z secondo un angolo, le due linee trasformate di queste
nel piano z’ si intersecheranno secondo lo stesso angolo.
Da ciò segue che la trasformazione conforme fa corrispondere le linee equipotenziali e di
corrente di un moto irrotazionale ideale nel piano z a quelle di un altro moto irrotazionale
nel piano z’. Tale trasformazione si dice conforme perché conserva gli angoli, nel senso che
se due linee nel piano z si intersecano nel piano z secondo un angolo, le due linee
trasformate di queste nel piano z’ si intersecheranno secondo lo stesso angolo.
4.3 Le trasformazioni conformi
Sia dunque dato nel piano z un campo di moto di potenziale complesso w(z). La funzione:
w( z) w( z ( z))
è analitica perché la sua derivata esiste ed è unica, basti vedere il secondo membro della
seguente relazione:
dw dw dz
dz dz dz
Ne segue che w’ è il potenziale complesso di un moto irrotazionale ideale nel piano z’
Siano p e p’ due punti corrispondenti nel piano z e z’: sarà
z p z ( zp )
per cui:
w( z p ) w( z ( z p )) w( z p )
nei punti corrispondenti dei due piani i due potenziali hanno lo stesso valore.
4.3 Le trasformazioni conformi
Anche la circolazione rimane immutata nei due piani poiché essa è datata rispettivamente
dagli integrali:
dw
C
dw
C
Che sono uguali perché lungo le due linee C e C’, che sono l’una la trasformata dell’altra, il
potenziale assume lo stesso valore.