Progetto Tritone
Rilevamento e analisi dei banchi di Posidonia
Relazione sull’avanzamento del progetto
Progetto Tritone
Rilevamento e analisi dei banchi di Posidonia
Relazione sull’avanzamento del progetto
Scopo del progetto.
Informatizzare le informazioni ottenute
delle operazioni di rilevamento e
caratterizzare le praterie di Posidonia
Oceanica sui fondali marini.
Le scelte effettuate durante la
realizzazione del sistema hanno
consentito di individuare le seguenti
priorità:
aumentare la precisione delle conoscenze
acquisite.
ottimizzare i volumi e la complessità della
strumentazione necessaria.
aumentare le possibilità operative e le
soluzioni possibili (in relazione alla
tipologia di imbarcazione, condizioni
meteo-marine, spazi disponibili ecc.)
diminuire i costi di gestione.
mantenere una modularità del sistema che
permetta scelte diverse per scopi
differenti.
Specifiche del sistema.
Tritone è uno strumento per il
telerilevamento subacqueo
georiferito, sviluppato da Olpa in
collaborazione con BMC Studio,
composto da:
un sistema di interfacciamento hardware
tra gli strumenti di input per
l’elaborazione dei dati.
un software atto all’elaborazione, la
registrazione e la visualizzazione degli
stessi.
Ad esso sono collegati gli strumenti di
monitoraggio che forniscono i dati di
input.
Specifiche del sistema.
Gli strumenti di acquisizione dati sono
tre con i loro rispettivi segnali di
ingresso trasmessi al tritone:
Segnale video in alta frequenza da
telecamera subacquea
Segnale NMEA standard da ricevitore
GPS
Segnale NMEA standard da
ecoscandaglio attivo
Specifiche del sistema.
Gli strumenti utilizzati a tal fine sono
prodotti ad uso commerciale e non
sono stati modificati per la loro
implementazione.
Ciò comporta i seguenti vantaggi:
Facile sostituzione dei singoli strumenti
vasta gamma di scelte per prestazioni e
costi.
facile assistenza tecnica.
L’hardware
L’architettura hardware di
Tritone si basa
principalmente su una
scheda di acquisizione
(Black Box) che riceve i dati
dai tre diversi strumenti e li
restituisce al software per
una loro elaborazione.
Il tutto avviene attraverso un
comune computer portatile
(di fascia media) tramite
porte USB.
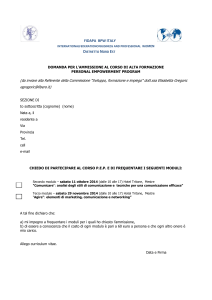
Schema delle periferiche utilizzate
(progettazione attuale)
GPS
NOTEBOOK
Microprocessore
dedicato
ES/FF
OSD
CAM
Il Software
È composto da un programma utilizzabile da qualsiasi
pc di uso commerciale. Permette la gestione dei
segnali in ingresso sul notebook e il loro
salvataggio con scelta di parametri qualitativi
(video in diverse risoluzioni).
Le sue funzioni sono:
elaborare i segnali provenienti dalla
strumentazione
restituire i risultati con la possibilità di salvarli
visualizzare il monitoraggio durante l’esecuzione
(Live Mode)
visualizzare precedenti lavori effettuati (File Mode)
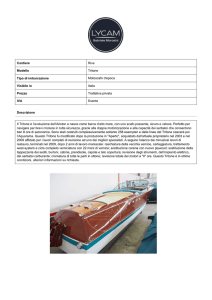
Il Software
(screenshot software Tritone)
Live/file Mode
Opzioni File
Riquadro Mappa
Coordinate
Punti aggiuntivi
Tracciato
Snapshot Aggiuntive
Controlli di riproduzione
Barra di scorrimento
Riquadro Video
Elaborazione dei dati.
Il risultato dall’elaborazione dei
segnali è costituito da due files:
File video in formato ad alta
definizione (PAL, non compresso)
del tracciato registrato dalla
telecamera.
File di testo contenente le
informazioni relative ai waypoint
della rotta eseguita (punti gps,
profondità, data e ora)
Elaborazione dei dati.
Sia il file video (.avi) che il file di testo
(.txt) sono consultabili dai comuni
software di utilizzo.
È inoltre possibile utilizzare
simultaneamente entrambi i files,
attraverso il software Tritone (File
Mode), analizzando registrazione
video e rotta relativa in
contemporanea, seguendone lo
svolgimento istante dopo istante.
Elaborazione dei dati.
Il file di testo permette altresì una facile
integrazione con programmi di
cartografia georiferita (GIS) sui quali è
possibile importare i waypoint e
tracciare le rotte seguite dalla
telecamera per lo sviluppo di
tematismi e caratterizzazioni delle
aree monitorate.
Specifiche dei dati.
I dati di input vengono trasmessi con frequenza massima di un
dato al secondo, secondo le specifiche dello strumento più
“lento”.
È possibile diminuire la frequenza di campionamento dati
(GPS, ECO), attraverso il pannello delle impostazioni del
software Tritone, nel caso non interessassero rilevazioni
geografiche troppo frequenti sul percorso (es: ridurre
quantità di dati non indispensabili).
E’ inoltre possibile definire diversi formati di qualità per la
registrazione video, lasciando la massima definizione
strumentale possibile (formato PAL, 720x480) oppure
scegliendo formati compressi (352x240, 320x240) per
ridurre lo spazio necessario all’archivio.
Specifiche dei dati.
La precisione dei dati si riferisce alle specifiche
dell’apparecchiatura utilizzata e non al sistema.
Cambiando gli strumenti di acquisizione è possibile variarne i
limiti in accuratezza, precisione e affidabilità del dato, in
relazione sia agli scopi sia ai costi.
Ad oggi la strumentazione utilizzata offre le seguenti specifiche:
Ecoscandaglio con precisione di 0.10 metri e frequenza 1
dato al secondo.
Antenna GPS con integrazione differenziale EGNOS
(European Geographic Navigation Overlay System) che
permette una correzione del posizionamento a meno di un
errore (minimo) di 2 metri.
Telecamera a colori Global Vision, con obbiettivo a grande
apertura (>70°), campo visivo 360°(rotazione) e supporto
luminoso (8 led). Provvista di cavo ombelicale a piccolo
diametro (4,2mm) rinforzato
Sviluppi.
Sono in attuale sviluppo tre diverse
implementazioni al sistema Tritone.
1.
2.
3.
integrazione di cartografia GIS nella
finestra di “rotta” del software
tritone.
monitoraggio della profondità della
telecamera in relazione al fondale.
automatizzazione dell’analisi sulle
immagini (per Posidonia oceanica)
Sviluppo 1.
GIS & Tritone.
Sarà possibile “caricare” mappe
georiferite della zona di
campionamento direttamente sul
software Tritone. Ciò permetterà:
immediato orientamento delle rotte
di indagine durante le operazioni di
monitoraggio.
semplice interpretazione e analisi
delle riprese subacquee in relazione
al posizionamento.
facile integrazione con precedenti
studi e caratterizzazioni del fondale.
Sviluppo 2.
Profondità telecamera.
Conoscere la profondità effettiva della
telecamera permetterà di:
quantificare l’area inquadrata e
quindi calcolare la superficie di
fondale monitorato.
definire un grado di libertà nella
posizione della telecamera rispetto
all’imbarcazione, diminuendo
l’errore di posizionamento
geografico del sistema.
Sviluppo 2.
Profondità telecamera.
Si utilizzerà un profondimetro per
immersioni subacquee posizionato
direttamente sulla culla della
telecamera e in grado di registrare il
profilo di immersione.
In post-produzione il profilo di profondità
verrà affiancato agli altri segnali
d’entrata e fornirà la posizione
relativa della telecamera dal fondo,
secondo dopo secondo.
Il profondimetro scelto per tale scopo è
Uwatec Aladin Tec.
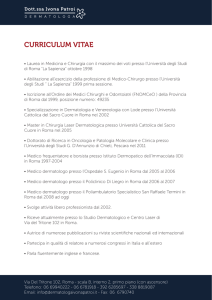
Schema delle periferiche utilizzate
(implementazione profondimetro)
GPS
NOTEBOOK
ES
Microprocessore
dedicato
PR
OSD
CAM
Sviluppo 3.
automazione analisi biocenosi (P. Oceanica).
È in fase di ricerca un sistema di riconoscimento dell’immagine
che permetta di automatizzare alcune fasi di analisi delle
immagini video e la successiva caratterizzazione del fondale
marino attraverso esse.
Attraverso il riconoscimento delle forme e dei colori, sarà
possibile interpretare le riprese subacquee direttamente
attraverso Tritone, definendo per esempio il grado di
ricopertura del fondale.
Questo non solo potrà alleggerire il normale lavoro di
caratterizzazione del fondale, ma anche di rendere l’errore
statisticamente costante in quanto libero dall’ interpretazione
soggettiva dell’operatore.
Problematiche da risolvere:
Rilevamento e Sovraimpressione dati
Il problema principale è l’individuazione
della posizione della telecamera in
funzione della posizione rilevata del
natante.
Siamo in grado, con una buona
approssimazione di definire la
profondità relativa (incertezza
inferiore a 0.1 mt), ma non la
posizione.
Problematiche da risolvere:
Estrazione di un filmato e relativi dati di
tracciato
Si ha un problema a livello di frequenza di
campionamento
1 dato al secondo per ogni valore di:
Posizione
Profondità relativa
Profondità assoluta
È necessario ipotizzare nel secondo un
movimento lineare della telecamera
Condizioni ambientali stabili e
velocità del natante regolare
Problematiche da risolvere:
Calcolo dell’area inquadrata da un dato
fotogramma
È necessario innanzi tutto conoscere le qualità
e capacità ottiche della camera.
Stiamo effettuando prove sperimentali pratiche
per individuare i valori di riferimento
dell’angolo di campo
In secondo luogo, ma altrettanto importante, è
necessario conoscere l’angolo di incidenza
del piano focale rispetto al fondale
inquadrato, supponendo una certa
regolarità nel fondale.
Prossimi sviluppi
Individuazione di un sistema per
monitorare l’angolazione della
telecamera rispetto al fondale
Ulteriori prove sperimentali per verifica il
grado di incertezza dei calcoli relativi
all’area inquadrata
Analisi qualitativa delle immagini
“catturate” dai filmati, tramite
riconoscimento di forme e colori
Esempio:
Monitoraggio margine posidonieto
In questo esempio sono stati selezionati
alcuni intervalli di videoripresa effettuati
ad Imperia nel tentativo di
individuazione del margine della
pateria di posidonia.
Fasi della ripresa:
1 – entrata nel posidonieto.
2 – riprese sopra la prateria di posidonia
3 – individuazione margine e fine prateria
4 – nuova individuazione del margine
5 – ripresa lungo il margine del posidonieto