FACOLTÁ DI INGEGNERIA
CORSO DI LAUREA
INGEGNERIA INFORMATICA
Progetto e Sviluppo di un
Algoritmo di Scheduling per il
Sistema RTAI
Candidato:
Luca Marzario
Sommario
Motivazioni
Obiettivi
Architettura del
sistema RTAI
Implementazione
Test
Conclusioni
Motivazioni
Applicazioni interattive e multimediali
Quality of service
Sistemi operativi general-purpouse (Windows,
Linux, ...) non offrono garanzie temporali
Sistemi operativi real-time
troppo costosi
non offrono supporto adeguato alle applicazioni
multimediali e interattive
Caratteristiche di Linux
Linux non è un sistema operativo real-time
Possiede molte caratteristiche che ne fanno un
ottimo sistema operativo:
robusto e affidabile
ampio supporto di processori
e periferiche
networking avanzato
strumenti di sviluppo e dubugging
interfaccia grafica
ampia disponibilità di software
Linux e Real-Time
Linux
non possiede le caratteristiche tipiche
dei sistemi real-time:
determinismo (prevedibilità)
possibilità di preemtion
specifica vincoli temporali
programmazione “fine” del timer
RTAI
Real-Time Application Interface (RTAI)
Affianca a Linux un kernel real-time
Schedula Linux come idle task
Vantaggi
Buone prestazioni real-time per i task RTAI
Sistema di sviluppo basato su Linux
Problemi
Starvation di Linux in caso di alti
carichi real-time
Crash del sistema in caso di errori
di programmazione o
malfunzionamenti
Soluzioni
Implementare un algoritmo di reservation su RTAI
Riservare banda di utilizzo del processore a ogni task
Tempo minimo di esecuzione garantito
Protezione del sistema da errori di
programmazione o malfunzionamenti
Schedulare Linux con il CBS
Shell di comandi sempre attiva
Minor tempo di risposta delle applicazioni Linux
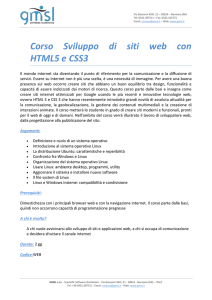
Real Time Application Interface (RTAI)
Sistema real-time che permette l’esecuzione di
applicazioni tipo hard real-time
Fa parte dei progetti Linux Real-Time
Questo tipo di sistemi si definisce
“real time executive”
Solo il kernel real-time ha il
pieno controllo dell’hardware
Principali sistemi: RTAI e
RTLinux
Linux
Task 1
Task n
real time executive
hardware
RTAI vs RTLinux
Prestazioni offerte paragonabili.
Interfacce di programmazione (API) molto simili
RTAI è meno intrusivo rispetto a RTLinux:
Maggiore mantenutibilità
Più facile aggiornamento delle modifiche kernel Linux
RTLinux open-source non è più mantenuto
RTAI costantemente aggiornato
Ultima versione di RTAI rilasciata il 23 settembre 2002
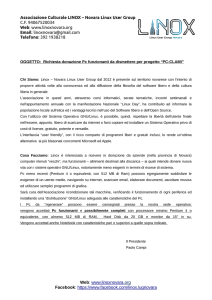
RTAI
Costituito di moduli da inserire nel kernel Linux
precedentemente modificato
Moduli principali
Gestore interruzioni
(interrupt dispatcher)
Scheduler
Moduli aggiuntivi
FIFO
shared memory
POSIX etc.
Task Real-Time
Gest. Interr
Scheduler
FIFO
Shared Mem
POSIX
RT task
kernel
Linux
modificato
Linux
Task
Applicazione RTAI
Costituita di due componenti
Real-time (acquisizione, elaborazione, controllo etc.)
eseguita da task RTAI (real-time)
Non real-time (visualizzazione, tracing etc.)
eseguita da processi Linux
non disturba le attività real-time
Linux
P1
Pk Task Task Task
P2
RT1 RT2 RTn
RTAI
Meccanismi di
comunicazione
fifo
scambio di messaggi
segnali
memoria condivisa
...
RTHAL
Modifiche kernel Linux
Linux perde il controllo diretto dell’hardware
Attivazione RTAI
Linux
Task 1
Task n
modifica dei puntatori
dell’rthal
RTHAL
Disattivazione
hardware
ripristino dei puntatori alle funzioni originali di Linux
Linux disable
interrupt
RTHAL disable
interrupt
Hard disable
Soft disable
RTAI interrupt dispatcher
Salva registri
rtai
handler?
Linux
handler?
RTAI dispatcher
Ripristina registri
rtai handler
Linux in
esec?
Linux
handler
interruzione
pendente
Scheduler
Architetture supportate
monoprocessore
multiprocessore
Politiche di scheduling
Prioritario Semplice
Rate Monotonic
Earliest Deadline First
Gestione del Timer
modalità periodica
modalità one-shot
Resource reservation
Ogni
task ha riservato un tempo Q ogni
periodo T
Processi hard real-time e soft real-time
possono convivere
E’ possibile riservare una frazione del
tempo macchina a Linux
Il Constant Bandwidth Server
Resource
reservation tramite CBS
(Constant Bandwidth Server)
Basato sul TBS e DSS
Rispetto al TBS non richiede WCET
Rispetto al DSS migliori prestazioni
Algoritmo CBS
Ad ogni task viene associato un server schedulato
con EDF
capacità massima
periodo
Ad ogni istanza servita dal server viene associata
una deadline dinamica
Durante l’esecuzione la capacità viene
decrementata. Una volta esaurita, viene ricaricata al
suo valore massimo e la deadline viene posposta
(diminuzione priorità)
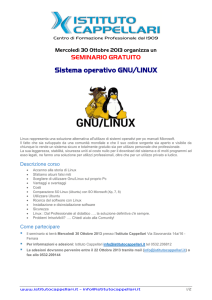
Applicazione di prova
RT1
RT2
RT3
FIFO
Linux P1
Frequenze jitter senza CBS
90
80
70
60
50
40
30
20
10
0
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
jitter (ms)
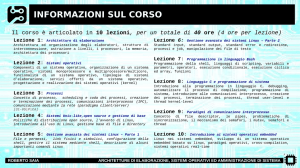
Frequenze jitter con CBS
100
90
80
70
60
50
40
30
20
10
0
-6
-5
-4
-3
-2
-1
0
jitter (ms)
1
2
3
4
5
6
Conclusioni
Risultati
ottenuti
Diminuzione dei tempi di risposta delle
applicazioni Linux
Garanzia di schedulazione di Linux anche in
caso di grossi carichi real-time
Maggior controllo
Maggiore robustezza