Calcolatori:
La Macchina di Von Neumann
1
La Macchina di Von Neumann
• L’architettura della maggior parte dei Calcolatori è
organizzata secondo il modello della cosiddetta
Macchina di Von Neumann.
• John Von Neumann è stato il ricercatore americano che,
sollecitato dall’esercito americano durante il corso della
seconda guerra mondiale, dedicò i suoi studi alla
realizzazione dei primi Calcolatori Elettronici.
• Grazie ai suoi studi Von Neumann nel 1946 realizzò
ENIAC (Electronic Numerical Integrator and Computer).
• ENIAC era in grado di effettuare 300 moltiplicazioni al
secondo, ed occupava una stanza lunga più di 30 metri.
2
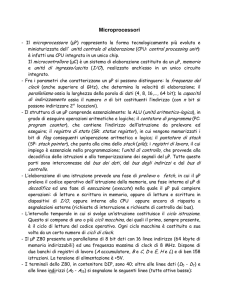
I Componenti fondamentali
• L’Unità di Elaborazione (CPU, Central Processing Unit):
contiene i dispositivi elettronici in grado di acquisire,
interpretare ed eseguire le istruzioni di un Programma.
• La Memoria Centrale: è il dispositivo dove si trovano le
informazioni necessarie all’esecuzione di un Programma,
ossia istruzioni e dati.
• Dispositivi di Input/Output o Periferiche: permettono di
trasferire informazioni tra memoria centrale e/o CPU e
l’ambiente esterno (es. schermo, tastiera, memoria di
massa).
• Bus di sistema: opera il collegamento tra i vari
componenti.
3
I Componenti fondamentali
CPU
Memoria di massa
Schermo/tastiera
Interfaccia di I/O
Interfaccia di I/O
Memoria
(centrale)
BUS
NOTA: la memoria di massa (tra cui il Disco fisso) e altri
dispositivi periferici di uso comune non rientrano tra i
componenti fondamentali, mentre ne fanno parte solo le
relative interfacce. L’ENIAC aveva un sistema a schede
perforate per l’I/O dei dati.
4
Principi di funzionamento
• L’unità di elaborazione (CPU) coordina le varie
attività, in particolare estrae istruzioni dalla memoria,
le decodifica comprendendo il loro significato e le
esegue.
• I contenuti della memoria sono indirizzati in base alla
posizione, indipendentemente dal tipo di dato o
istruzione contenuto.
• Le istruzioni vengono eseguite in modo strettamente
sequenziale (principale limite del modello di Von
Neumann).
5
Memoria centrale
• Affinché un Programma possa essere eseguito deve
necessariamente risiedere in Memoria centrale.
• La Memoria centrale è composta da un certo numero di
celle (o locazioni o posizioni), ciascuna delle quali può
memorizzare un’informazione in forma binaria.
• Le celle hanno generalmente dimensione di un byte (8
bit) o di una parola quindi, a seconda del tipo di
Calcolatore, 16, 32 o 64 bits.
• Le celle sono numerate con numeri interi da 0 a N-1, con
N il numero di celle totali.
• Ciascuna cella è individuata univocamente da un numero
intero che è il suo indirizzo.
6
Memoria centrale
• La capacità della Memoria (non solo quella centrale) si
misura in byte:
– Kilobyte (Kb) = 210 Byte = 1024 Byte.
– Megabyte (Mb) = 220 Byte = 1048576 Byte.
– Gigabyte (Gb) = 230 Byte = 1073741824 Byte
• Il numero di bit che costituiscono l’indirizzo definisce la
dimensione massima della memoria indirizzabile (lo spazio
di indirizzamento): con k bit si possono indirizzare 2k celle
diverse.
• E’ realizzata con circuiti a semiconduttori (memoria
elettronica) ed è volatile, ossia perde le informazioni in
essa contenute quando non alimentata (es. quando il
7
calcolatore viene spento).
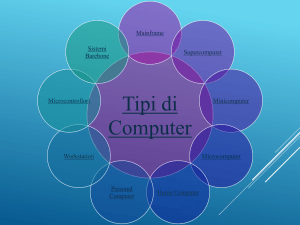
Componenti della Memoria
centrale
• Oltre all’insieme delle celle, la Memoria centrale è
costituita da:
– Registro Indirizzi: contiene l’indirizzo della cella di
memoria che vogliamo leggere o scrivere.
– Decodificatore di indirizzi: è il dispositivo che
individua la cella rappresentata nel Registro indirizzi.
– Registro Dati: contiene l’informazione che deve essere
scritta nella cella o che è stata letta dalla cella
individuata dal Decodificatore di indirizzi.
• Il tempo necessario ad accedere ad una cella di memoria
è costante, ossia è indipendente dall’indirizzo della cella a
cui si accede (memoria RAM, Random Access Memory).
8
Altri tipi di Memoria
• Read Only Memory (ROM): memoria sempre a
semiconduttori ma di tipo non volatile e di sola lettura.
Utilizzata ad esempio per memorizzare i microprogrammi
a livello firmware (BIOS).
• Memorie flash: memorie elettroniche riscrivibili non volatili.
Sono più lente delle memorie RAM (soprattutto in
scrittura) ma sono sempre più diffuse in dispositivi portatili
(macchine fotografiche digitali, telefoni cellulari, etc.) e per
trasportare dati (collegandosi al calcolatore tramite
interfaccia USB).
• Memorie di massa: di grande capacità e non volatili, sono
più lente rispetto alla RAM. Sono principalmente
realizzate tramite tecnologie magnetiche (Hard Disk) e
9
ottiche (CD, DVD). Il tempo di accesso non è costante.
Bus di sistema
• Il Bus di sistema è costituito da un insieme di connessioni
elementari, o linee, lungo le quali viene trasferita
informazione.
• Ciascuna linea sarà preposta al trasferimento del segnale
elettrico relativo ad un solo bit (tensione alta=1, tensione
bassa=0) quindi si parlerà ad esempio di Bus a 16, 32 o 64
bits. I bit vengono trasferiti in parallelo, ossia
contemporaneamente.
• Il Bus è in genere sotto il controllo della CPU, che
seleziona l’interconnessione da attivare e indica
l’operazione da compiere.
• Le altre unità collegate al Bus entrano in azione solo
quando sono selezionate dalla CPU.
10
Bus di sistema
• Le linee del Bus si suddividono in tre categorie:
– Bus dati: usato per trasferire dati fra CPU e memoria o
interfacce di I/O. La sua ampiezza dovrebbe essere
quella della parola di memoria.
– Bus indirizzi: usato per trasferire l’indirizzo della cella di
memoria in cui la CPU va a scrivere/leggere. La sua
ampiezza dipenderà dallo spazio di indirizzamento.
– Bus di controllo: dove passano i segnali di controllo che
indicano il tipo di operazione da effettuare. Esempio,
supponiamo vi siano due linee:
• R/W: indica (se alto) un’operazione di lettura (READ)
oppure (se basso) di scrittura (WRITE).
• M/IO: distingue tra operazione con la memoria (alto) o
11
con un’interfaccia di I/O (basso).
Schema di funzionamento di
una RAM
cella da 8 bit
parola
da 8 bit
0 1 0 0 1 1 0 0
16 celle di memoria
Decodificatore
Bus controllo
Bus dati
Bus indirizzi
linee di selezione parola
0110
R/W
0 1 0 0 1 1 0 0
dato
(letto o da scrivere)
12
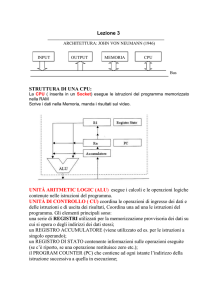
L’Unità di Elaborazione (CPU)
• La sua funzione è quella di eseguire i Programmi contenuti nella
memoria centrale.
• Si compone di tre componenti fondamentali:
– L’Unità di Controllo: è il dispositivo che coordina le
operazioni della CPU.
– L’Unità aritmetico-logica (ALU, Arithmetic and Logic
Unit): effettua le operazioni di tipo aritmetico e logico
richieste dalle istruzioni di un Programma.
– Registri: in pratica costituiscono la memoria interna alla
CPU, del tutto analoghi a celle di memoria, ma accessibili più
velocemente; contengono dati o istruzioni di uso frequente,
oppure risultati intermedi. Tra questi registri troviamo anche i
Registri Dati e i Registri Indirizzi.
13
L’Unità di Controllo
•
I suoi compiti principali sono:
1. Recuperare l’istruzione successiva da eseguire
2. Decodificarla
3. Organizzare la sua esecuzione
•
Contiene almeno tre registri fondamentali:
– Instruction register (IR): contiene l’istruzione
corrente.
– Program counter (PC): contiene l’indirizzo di
memoria della prossima istruzione da eseguire.
– Program status word (PSW): contiene dei bit speciali
che riflettono il risultato dell’ultima operazione (i
cosiddetti effetti collaterali).
14
Arithmetic-Logic Unit (ALU)
•
•
•
•
Esegue le operazioni logiche (AND, OR, NOT),
aritmetiche (somme, prodotti) e confronti.
In genere memorizza il risultato in un registro
predefinito.
Inoltre imposta i bit del Program Status Word in
accordo al risultato.
Operazioni su valori in virgola mobile e funzioni
trascendenti (trigonometriche, radici quadrate, etc.)
vengono in genere calcolate da un’unità apposita
della ALU detta Floating Point Unit (FPU).
15
Program Status Word (PSW)
•
Contiene una serie di bit (in questo caso denominati
flags) che se impostati ad 1 indicano il verificarsi di
alcune situazioni particolari:
– bit di carry: l’ultima addizione ha avuto un riporto.
– bit di zero: il risultato dell’ultima operazione è 0.
– bit di segno: segno del risultato dell’ultima
operazione.
– bit di overflow: ad esempio se il risultato
dell’ultima operazione è più grande del massimo
intero rappresentabile.
– etc..
16
Struttura della CPU e
collegamenti con la memoria
CPU
ALU
PSW
Address Bus
R01
R00
Data Registers
Data Bus
Control
Unit
Control Bus
op
R02
IR
R03
PC
Memory
17
Ciclo di esecuzione della CPU
•
Nell’esecuzione di un Programma, la CPU opera in
modo ciclico, ripetendo fino alla terminazione del
Programma almeno queste tre fasi (azioni atomiche):
1.
2.
3.
Lettura (fetch): acquisizione dalla memoria della
prossima istruzione da eseguire;
Decodifica (decode): riconoscimento dell’istruzione e
identificazione delle operazioni da svolgere per
completarne l’esecuzione;
Esecuzione (execute): effettuazione delle operazioni
corrispondenti all’istruzione.
18
Ciclo di esecuzione della CPU
•
Tutte le azioni eseguite all’interno della CPU (ma
anche di altri dispositivi) vengono sincronizzate da un
oscillatore a cristalli di quarzo (clock), che segna la
scansione temporale degli eventi:
ciclo di clock
•
•
In un ciclo di clock viene eseguita una singola azione
atomica. La frequenza di clock si misura in Hertz (cicli
o oscillazioni al secondo).
Le frequenze delle CPU dei moderni Calcolatori è
19
dell’ordine dei GHz (1 GHz = 1000000000 Hz).
CPU: Linguaggio Macchina
• Il linguaggio in cui sono scritti i Programmi che la
CPU è in grado di eseguire si chiama linguaggio
macchina.
• Ogni istruzione (es. lettura, somma, etc.) è definita da
un codice binario speciale detto codice operativo.
• Ogni CPU è caratterizzata da un suo insieme di
istruzioni elementari (instruction set) che ne
costituisce il linguaggio macchina.
• CPU diverse “parlano linguaggi” diversi (anche se
oggi, ad esempio, AMD e Intel “parlano” quasi lo
stesso linguaggio, molto diverso invece, ad esempio,
20
da quello delle CPU IBM)!
CPU: Linguaggio Macchina
• Un’istruzione è costituita da una stringa di bit
contenente:
– Il codice operativo dell’istruzione
– Gli operandi dell’istruzione
• Esempio di istruzione che effettua la somma di due
operandi src1 e src2 contenuti nei registri R02 e
R03 e salva il risultato nel registro R01 (dst):
codice operativo
000000 00000 100000
dst(R01) src1(R02) src2(R03)
00001
00010
00011
21
Linguaggio Assembler
• La scrittura di un Programma in Linguaggio Macchina è
un’operazione estremamente complicata, per via del fatto di dover
indicare istruzioni e operandi in codice binario.
• Il Linguaggio Assembler (o Assemblativo) è un linguaggio
simbolico, nel senso che vengono adoperati dei simboli per la
rappresentazione del codice operativo (tipo add per la somma) e
degli operandi di un’istruzione (direttamente il nome di un
Registro, es. R01, o un numero in esadecimale per indicare un
indirizzo di memoria).
• In pratica sussiste una corrispondenza biunivoca tra l’insieme
delle istruzioni in Linguaggio Macchina e quello delle istruzioni in
Linguaggio Assembler per una stessa CPU.
• Un Programma scritto in Assembler deve essere tradotto in
Linguaggio Macchina per essere eseguito dalla CPU, la
traduzione è effettuata da un Programma apposito, chiamato 22
Assemblatore.
Tipi di Istruzione
• Istruzioni aritmetico-logiche: manipolano dati in ingresso e
restituiscono il risultato in uscita, specificando dove depositare il
risultato (Registro).
• Istruzioni di salto: permettono di alterare l’esecuzione
sequenziale di un programma. Si dividono in istruzioni di:
– salto incondizionato: specificano l’indirizzo di memoria in cui si
trova la prossima istruzione da eseguire.
– salto condizionato: specificano inoltre una condizione che
deve essere verificata affinché il salto abbia luogo, altrimenti
l’elaborazione prosegue in sequenza.
• Istruzioni di ingresso/uscita: servono a trasferire dati da e
verso la CPU, specificando l’unità periferica da usare (es.
memoria di massa) e la posizione del dato sia nella periferica che
nel Calcolatore (es: Registro o cella di Memoria).
23
Esempi di Istruzioni in
Assembler
Istruzione
add R01,R02,R03
addi R01,R02,421
lw R01,R02,421
sw R01,R02,421
j 8B2F0
beq R01,R02,-421
Significato
R01 ← R02 + R03
R01 ← R02 + 421
R01 ← M[R02 + 421]
M[R02 + 421] ← R01
vai a 8B2F0
se (R01=R02) vai a PC-421
Tipo
aritmetico-logica
aritmetico-logica
ingresso/uscita (I)
ingresso/uscita (O)
salto (incondizionato)
salto (condizionato)
24
Esecuzione di un Programma
nella Macchina di Von Neumann
•
Come abbiamo visto, ciascuna istruzione di un Programma viene eseguita
in tre fasi: l’acquisizione dalla Memoria, l’interpretazione e l’esecuzione.
•
L’acquisizione (fetch) si svolge a sua volta in quattro passi:
•
Il contenuto del PC viene trasferito attraverso il Bus Indirizzi al Registro
Indirizzi della Memoria Centrale. Attraverso il Bus di Controllo viene
specificata un’operazione di Lettura.
•
Avviene l’operazione di Lettura dalla Memoria Centrale: il contenuto
della Cella specificato dal Registro Indirizzi viene copiato nel Registro
Dati della Memoria.
•
Attraverso il Bus Dati viene trasferita la nuova istruzione nell’IR della
CPU.
•
Viene incrementato di 1 il valore del PC (ma in caso di “salto” il PC sarà
25
aggiornato con un altro valore)
Esecuzione di un Programma
nella Macchina di Von Neumann
•
La fase di interpretazione (decode) consiste nell’analisi
dell’IR per identificare l’operazione da eseguire. In questa
fase viene analizzato solo il Codice operativo dell’istruzione
corrente.
•
La fase di esecuzione (execute) dipende dal tipo di
operazione (aritmetico-logica, salto o trasferimento dati). Se
l’operazione è di tipo aritmetico-logica sarà eseguita con
l’ausilio dell’ALU.
26
Dispositivi Periferici
• Le Periferiche comunicano con la CPU tramite delle
interfacce di I/O.
• Un’interfaccia contiene Registri per inviare comandi
alla Periferica, scambiare dati e controllarne il
funzionamento.
• Le interfacce sono molto diverse tra loro a seconda
del tipo di Periferica considerata:
– Tastiera
– Stampante
– Dispositivi di Memoria di massa
– Scheda Video
– Strumenti di misurazione
– Sensori e attuatori di robot
– etc.
27
Dispositivi Periferici
• Le Periferiche possono essere più o meno
“intelligenti”, ovvero possono essere dotate di proprie
unità di controllo, capaci di convertire ed elaborare
dati.
• In questo caso le Periferiche saranno in grado di
cooperare con la CPU, occupandosi di eseguire
operazioni più o meno complesse (si pensi, ad
esempio, alla Scheda Video).
28
Memorie di massa: dischi
magnetici
• Il dispositivo di Memoria di massa (o Memoria
secondaria) che riveste un’importanza maggiore in
un Calcolatore è sicuramente il Disco fisso (o Hard
Disk)
• Un Disco fisso è composto da uno o più supporti
circolari di pari diametro ricoperti su entrambe le
facce da un sottile strato di materiale magnetico, le
cui condizioni di magnetizzazione consentono di
memorizzare i dati.
• Ogni unità atomica di memorizzazione si può trovare
in due sole condizioni di magnetizzazione,
corrispondenti ai valori 0 e 1.
29
Memorie di massa: dischi
magnetici
• I Dischi magnetici sono supporti di memorizzazione
non volatile, però presentano un tempo di accesso
ai dati molto maggiore rispetto a quello richiesto
dalla Memoria centrale.
• D’altra parte, la loro capacità può superare
notevolmente quella della Memoria centrale, e ciò
rende questi dispositivi particolarmente adatti alla
funzione di storage di Dati e Programmi.
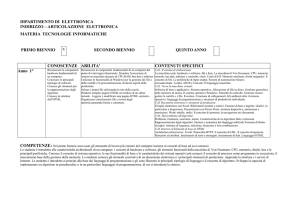
30
Organizzazione di un disco
magnetico
• Le operazioni di lettura/scrittura sono eseguite da
una testina che viene posizionata in prossimità della
zona magnetizzata coinvolta nell’operazione.
• Le informazioni sono memorizzate in cerchi
concentrici detti tracce la cui larghezza è pari alla
dimensione della testina, e che contengono tutti la
stessa quantità di dati (la densità di memorizzazione
cresce dalla periferia al centro del disco).
• Le tracce sono suddivise in settori ed ogni settore
ospita dei blocchi di dati (records), in genere l’unità
minima di trasferimento tra disco e memoria
centrale.
31
Organizzazione di un disco
magnetico
tracce
e
settor
spazi tra
tracce
spazi tra
record
32
Funzionamento di un disco
magnetico
•
•
•
Per poter essere utilizzato un disco deve essere
formattato: in pratica si organizza la sua superficie in
tracce e settori.
Durante il funzionamento, il disco ruota a velocità
costante.
Per accedere ad un determinato record del disco si deve:
1. Posizionare la testina nella traccia contenente il record
(seek time o tempo di posizionamento).
2. Attendere che la rotazione posizioni il settore cercato
sotto la testina (latency time o tempo di latenza,
dipende dalla velocità di rotazione del disco).
3. Attivare la lettura/scrittura (trasferimento) dei dati.
33
Estensioni della Macchina di
Von Neumann
•
Se ci limitiamo a considerare il modello classico di Von Neumann, i
fattori che influiscono sulla velocità di elaborazione e potenzialità del
Calcolatore sono:
–
Dimensione dei Registri: determina la quantità di informazione su
cui la CPU può lavorare in un certo istante. I moderni Calcolatori
hanno Registri a 32, 64 e talvolta 128 bit.
–
Dimensione della RAM: più grande è la disponibilità di Memoria
centrale, meno accessi al Disco fisso sarò costretto a fare per
caricare in Memoria Dati e Istruzioni dei Programmi.
–
La frequenza di clock della CPU: infatti, la CPU usa le oscillazioni
delle molecole di un cristallo di quarzo (come l’orologio) per
scandire il tempo delle sue operazioni. I primi PC avevano una
frequenza pari a 4.77 MHz.
–
Ampiezza del Bus Dati: determina quanti bit alla volta vengono
trasmessi fra CPU e gli altri dispositivi.
–
Ampiezza del Bus Indirizzi: determina il numero di byte di
Memoria che la CPU è in grado di indirizzare.
34
Estensioni della Macchina di
Von Neumann
•
Il modello classico di Von Neumann presenta però tre
limiti fondamentali che ne limitano le prestazioni:
1. L’esecuzione dei Programmi avviene in maniera
sequenziale, un’istruzione dopo l’altra.
2. Impiego eccessivo del Bus di sistema per
l’interscambio delle informazioni con la Memoria
centrale e gli altri dispositivi.
3. I tempi di accesso alla Memoria centrale sono alti
rispetto alla velocità di funzionamento della CPU.
35
Estensioni della Macchina di
Von Neumann
•
Al fine di incrementare al massimo le prestazioni, nel corso dei
decenni sono state studiate e realizzate alcune modifiche
apportate al modello classico di Von Neumann:
–
–
–
Esecuzione separata ed in parallelo da parte di dispositivi appositi
delle varie fasi di un’istruzione (fetch, decode e execute):
architetture di tipo Pipeline.
Utilizzo di memorie Cache, ossia memorie estremamente veloci ma
anche più costose e ridotte da inserire tra CPU e Memoria centrale,
dove conservare Dati e Istruzioni di uso più frequente.
Architetture che utilizzano più processori:
• Processori dedicati: affiancano la CPU eseguendo dei compiti
specifici, quali il calcolo numerico (coprocessori matematici), la
gestione della grafica (GPU), la gestione dei canali di I/O (DMA,
Direct Memory Access).
• Sistemi multiprocessore: architetture dotate di molteplici CPU
indipendenti.
36
Architetture Pipeline
•
•
•
•
Nelle CPU dotate di Pipeline, l’esecuzione delle istruzioni di un
Programma vengono eseguite mediante un meccanismo simile
a quello di una catena di montaggio.
In pratica, mentre la CPU sta eseguendo una determinata
istruzione, è in corso l’acquisizione e decodifica dell’istruzione
successiva.
Questa tecnica prende anche il nome di Parallelismo Virtuale,
perché il flusso delle istruzioni procede dando l’impressione, in
termini di prestazioni, di disporre di più processori.
Per ottenere il massimo delle prestazioni è necessario però che
non ci siano istruzioni consecutive dipendenti tra di loro, ad
esempio:
– y ← x + 1; z ← y + 1
37
Memoria Cache
•
•
•
•
•
Ogni volta che la CPU deve accedere a Istruzioni e Dati, questi
devono essere caricati dalla RAM, il cui tempo di accesso è
molto più lento rispetto alla velocità della CPU.
La Memoria Cache è un’area di memoria particolare ad alta
velocità di accesso e di dimensioni piuttosto piccole rispetto alla
RAM.
Contiene Dati e Istruzioni utilizzati con maggior frequenza dalla
CPU, e questo determina l’incremento delle prestazioni.
In fase di Lettura, se alla CPU serve un Dato o un’Istruzione, la
ricerca viene fatta prima nella Cache, e se l’informazione non è
presente viene prelevata dalla RAM e copiata nella Cache.
In fase di Scrittura, l’informazione viene scritta sia in RAM che
nella Cache.
38
Memoria Cache
•
•
L’esistenza della Cache è del tutto trasparente dal punto di
vista del Linguaggio Macchina, in quanto la CPU è
“convinta” di lavorare solo con la RAM.
La Memoria Centrale non può essere sostituita con una
memoria realizzata come la Cache, per due motivi
principali:
– La Cache è molto più costosa di una memoria di tipo
tradizionale.
– Per garantire un tempo di accesso estremamente
basso, la Cache deve fisicamente risiedere vicino alla
CPU, possibilmente integrata sullo stesso chip, così da
non richiedere l’utilizzo del Bus di sistema per l’accesso.
Quindi è fisicamente impossibile, per ragioni puramente
di spazio, realizzare Cache veloci e allo stesso tempo
39
molto capienti.
Architetture a più processori
•
•
•
•
Un’architettura a più processori (o parallela) è un sistema
di calcolo costituito da un insieme di processori in grado di
comunicare e cooperare tra loro.
Se si considerano i sistemi multiprocessore (quelli dove
sono presenti N CPU), teoricamente sarebbe lecito
aspettarsi un aumento delle prestazioni direttamente
proporzionale al numero di CPU (N processori, allora
sistema N volte più veloce).
In realtà l’incremento di prestazioni è inferiore, e il motivo
principale risiede nel fatto che è complicato scrivere
programmi che siano in grado di sfruttare appieno tale
architettura.
Infatti, il problema delle istruzioni dipendenti (vedi Pipeline)
riguarda anche questo tipo di architettura.
40
Architetture a più processori
•
•
L’impiego di architetture a più processori comporta
l’importante scelta di come gestire e sincronizzare gli
accessi alla Memoria centrale.
In genere si distinguono due approcci:
–
–
Architetture a Memoria Distribuita: ciascuna CPU è dotata
di una memoria privata. Ad esempio i processori dedicati
GPU (Graphics Processing Unit) delle schede grafiche più
sofisticate, dispongono anche di una memoria propria.
Architetture a Memoria Condivisa: tutte le CPU
condividono l’accesso ad una memoria comune, utilizzando
anche uno stesso BUS di sistema. La necessità di dover
utilizzare un BUS comune riduce le prestazioni del sistema
introducendo un “collo di bottiglia” nell’accesso alla memoria.
Il problema può essere affrontato adottando memorie Cache
locali per ciascuna CPU. I moderni sistemi “dual core” (due
CPU nello stesso chip) rientrano in questa categoria. 41
Architetture CISC e RISC
•
E’ possibile classificare i Calcolatori anche rispetto al numero e alla
complessità dell’insieme di istruzioni componenti il Linguaggio
Macchina della CPU.
–
Architetture CISC (Complex Instruction Set Computers): su
questo tipo di architettura è stata basata a lungo la maggior parte
dei Calcolatori sul mercato, si caratterizza per:
• Il Linguaggio Macchina è costituito da un numero grande di
istruzioni.
• L’elaborazione di ogni singola istruzione è piuttosto complessa.
• Comporta una struttura hardware della CPU complessa.
–
Architetture RISC (Reduced Instruction Set Computers): queste
architetture sono caratterizzate da un ridotto insieme di istruzioni,
inoltre le istruzioni sono progettate in maniera tale da rendere
l’hardware della CPU il più semplice possibile, con notevoli
vantaggi in termini di prestazione.
42
Architetture CISC e RISC
Processori Intel CISC (“famiglia x86”)
Modello
8086
80286
80386
80486
Anno
Bus Dati
produzione
(bit)
1978
1982
1985
1989
16
16
32
32
Registri
Memoria
(bit)
Indirizzabile
16
16
32
32
1 Mb
16 Mb
4 Gb
4 Gb
Frequenza massima
CPU (MHz)
8
20
33
100
43
Architetture CISC e RISC
Processori Motorola CISC (“famiglia 680x”)
Modello
68000
68020
68030
68040
68060
Anno
Bus Dati
produzione
(bit)
1979
1984
1987
1989
1993
16
32
32
32
32
Registri
Memoria
(bit)
Indirizzabile
32
32
32
32
32
16 Mb
4 Gb
4 Gb
4 Gb
4 Gb
Frequenza massima
CPU (MHz)
8
16
32
40
66
44
Architetture CISC e RISC
Processori Intel “ibridi” (CRISC)
Modello
Anno
Bus Dati
produzione
(bit)
Pentium
P MMX
Pentium II
Pentium III
Pentium 4
Itanium-2
1993
1997
1997
2000
2002
2003
64
64
64
64
64
128
Registri
Memoria
(bit)
Indirizzabile
32
32
32
32
32
64
4 Gb
4 Gb
4 Gb
4 Gb
4 Gb
128 Gb
Frequenza massima
CPU (MHz)
150
266
450
1000
3200
1500
45
Architetture CISC e RISC
Processori IBM-Motorola RISC
Modello
Anno
Bus Dati
produzione
(bit)
MPC 601
PowPC 750
MPC 7400
MPC 7455
PowPC 970
1994
1997
1999
2002
2004
64
64
64
64
2 da 32
Registri
Memoria
(bit)
Indirizzabile
32
32
32
32
64
4 Gb
4 Gb
4 Gb
4 Gb
4 Tb (42 bit)
Frequenza massima
CPU (MHz)
120
466
500
1250
2500
46