UNIVERSITÀ DEGLI STUDI ROMA TRE
Dipartimento di Matematica e Fisica
Corso di Laurea Magistrale in Astrofisica
Realizzazione software e hardware
di un apparato sperimentale per la
ricostruzione delle posizioni dei
corpi celesti
Laureando
Relatore
Tommaso Bosco
Dott. Enrico Bernieri
A. A. 2013/2014
“Io so di essere mortale, creatura effimera. Ma quando osservo le orbite circolari
degli astri non tocco più la terra con i piedi, io sono vicino a Zeus e mi nutro a
piacere con ambrosia, la bevanda degli dei.”
- Claudio Tolomeo -
Indice
Introduzione
1
1 Elementi di meccanica celeste
1.1 Stelle fisse e stelle erranti . . . . . .
1.2 Le effemeridi . . . . . . . . . . . . .
1.2.1 Un po’ di storia... . . . . . .
1.2.2 Effemeridi moderne . . . . .
1.3 Parametri orbitali . . . . . . . . . .
1.3.1 Il problema dei due corpi . .
1.3.2 Trasformazioni di coordinate
1.4 Teorie planetarie: il modello VSOP
1.4.1 La soluzione VSOP87 . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 L’apparato sperimentale: il software
2.1 Dall’antichità all’era moderna . . . . . . . . . . .
2.2 Il planetario a proiezione . . . . . . . . . . . . . .
2.2.1 I sistemi di proiezione opto-meccanici . . .
2.2.2 I sistemi di proiezione digitali . . . . . . .
2.3 Software planetari . . . . . . . . . . . . . . . . . .
2.3.1 Stellarium e la nuova generazione software
2.4 Nightshade . . . . . . . . . . . . . . . . . . . . . .
2.4.1 Struttura del programma . . . . . . . . . .
2.4.2 Caratteristiche e funzionalità . . . . . . .
2.4.3 StratoScript . . . . . . . . . . . . . . . . .
3 L’apparato sperimentale: l’hardware
3.1 Le componenti hardware . . . . . . .
3.1.1 Computer . . . . . . . . . . .
3.1.2 Cupola . . . . . . . . . . . . .
3.1.3 Sistemi di proiezione . . . . .
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
5
8
9
11
12
13
15
17
19
.
.
.
.
.
.
.
.
.
.
23
23
25
27
29
31
33
38
39
39
44
.
.
.
.
49
49
50
50
53
3.2
Sistema a proiettore singolo . . . . . . . . . . . . . . . . . . . . . . . 55
3.2.1 Videoproiettore . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.2.2 Componenti ottici . . . . . . . . . . . . . . . . . . . . . . . . . 57
4 Realizzazione del planetario digitale
4.1 Gradi di libertà del sistema . . . . . . . .
4.2 Reperimento degli elementi da assemblare
4.3 Progettazione e lavorazione . . . . . . . .
4.3.1 Gruppo ottico . . . . . . . . . . . .
4.3.2 Supporto regolabile . . . . . . . . .
4.3.3 Completamento dell’apparato . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
75
76
77
79
79
88
91
5 Conclusioni
97
Bibliografia
99
A Trattazione analitica del problema dei due corpi
A.1 Equazioni del moto . . . . . . . . . . . . . . . . . . . . . . .
A.2 Il moto del centro di massa . . . . . . . . . . . . . . . . . . .
A.3 Le equazioni del moto relativo . . . . . . . . . . . . . . . . .
A.4 Il problema nel piano . . . . . . . . . . . . . . . . . . . . . .
A.5 Gli elementi orbitali in funzione delle costanti d’integrazione
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
101
. 101
. 102
. 102
. 106
. 108
B Guida ai comandi di NL
111
C Subroutine VSOP87
115
D Script
129
E Tavole di progettazione dell’apparato
133
Introduzione
In questo lavoro di Tesi mi sono occupato della progettazione e della realizzazione di
un apparato digitale in grado di ricostruire e proiettare su una superificie semisferica
le posizioni dei corpi celesti.
Un tale apparato sperimentale, comunemente definito planetario, consiste in una
componente software e una hardware. Un software planetario è uno strumento che
permette di simulare il cielo diurno e notturno per mezzo di un computer. Ne esistono di molti tipi, dai più rudimentali in grado di disegnare carte e mappe stellari,
ai più complessi programmi di visualizzazione realistica del cielo mediante moderne tecnologie di computer grafica. Diversi sono anche gli scopi e gli utilizzi che
se ne possono fare: alcuni vengono adoperati esclusivamente su un pc o altro dispositivo elettronico (come tablet o smartphone), altri sono in grado di controllare
telescopi, altri ancora possono essere sfruttati per anticipare le posizioni degli astri
e quindi programmare osservazioni astronomiche. Ma, soprattutto, un software planetario, interfacciato con un opportuno sistema hardware, può essere utilizzato per
riprodurre una vasta gamma di fenomeni astronomici in un ambiente immersivo e
coinvolgente, come quello del planetario.
Nell’ambito di questo lavoro ho selezionato Nightshade Legacy come software
migliore per la riproduzione di immagini full-dome (a tutta cupola), in base a criteri
di accuratezza, interfaccia grafica, funzionalità e disponibilità. Una delle proprietà
più utili del programma è la possibilità di personalizzare i contenuti e, mediante la
realizzazione di script, creare dei veri e propri spettacoli astronomici. Ho realizzato,
a titolo di esempio, un programma scritto in codice StratoScript, che esegue una
serie di funzioni base in automatico, allo scopo di mettere in mostra alcune delle
potenzialità del software.
L’hardware si basa su due elementi principali: un computer e un proiettore
digitale. L’innovazione più importante della tecnologia digitale sta nel fatto che,
rispetto al tradizionale sistema opto-meccanico che rappresenta il cielo in due dimensioni cosı̀ come lo si vede dalla Terra, viene inserita la terza dimensione spaziale.
Diventa quindi possibile, ad esempio, simulare un viaggio di avvicinamento a Marte,
una crociera tra le stelle della Galassia o addirittura allontanarsi fino a vedere la
struttura dell’Universo a grande scala. Oltre alla proiezione del cielo, un planetario
digitale consente di mostrare qualsiasi tipo di contributo multimediale: immagini
fisse, animazioni grafiche, filmati o anche interi film, opportunamente accompagnati
da un supporto audio stereo. L’esperienza audio-visiva viene ulteriormente esaltata
dalla proiezione full-dome che copre, cioè, l’intera superficie della cupola semisferica.
Riuscire a proiettare un’immagine su una superficie curva, tuttavia, non è un’operazione immediata e si deve ricorrere a sistemi ottici supplementari in grado di
1
2
Introduzione
trasformare l’immagine generata dal computer e renderla visualizzabile in maniera
corretta. La soluzione migliore è rappresentata dall’utilizzo di un obiettivo fotografico fisheye che consente una proiezione stereografica a 180 gradi, senza distorsioni,
tagli o difetti nell’immagine.
Ho progettato e realizzato dunque un proiettore digitale di piccole dimensioni
e facile da trasportare. Consiste di due elementi separati, un videoproiettore e un
gruppo ottico, che vengono assemblati mediante una struttura di supporto regolabile. Durante il lavoro di Tesi mi sono occupato della scelta dei componenti e
della progettazione dell’apparato che è stato poi realizzato nella pratica dall’officina
meccanica.
I dispositivi o strumenti acquistati allo scopo sono:
• un videoproiettore ad alta definizione;
• un obiettivo a focale fissa 50 mm;
• una diagonale da 2 pollici per telescopio;
• un obiettivo fisheye a formato pieno.
Il fascio di luce che esce dal proiettore entra nella lente condensatrice da 50 mm
che ha il compito di collimare i raggi e indirizzarli verso il centro dello specchio della
diagonale, posto a 45 gradi rispetto al piano; la luce riflessa a 90 gradi verso l’alto
passa poi attraverso l’obiettivo fisheye e viene proiettata in tutte le direzioni con un
angolo di uscita di 180 gradi. L’obiettivo fisheye viene dunque utilizzato in maniera
inversa rispetto allo standard: invece di raccogliere luce da tutte le direzioni e inviarla
verso il punto focale, raccoglie la luce dal fuoco e la proietta su una semisfera.
Raggiungere una qualità ottimale della proiezione dipende quindi in maniera cruciale dal problema geometrico dell’allineamento ottico, che ho analizzato in dettaglio
nella fase iniziale del lavoro. Il primo allineamento da eseguire riguarda l’asse ottico
del proiettore e quello della lente condensatrice e genera quattro gradi di libertà del
sistema, due sugli angoli e due sulle traslazioni. Altri due gradi di libertà vengono
introdotti dal secondo allineamento che conivolge l’asse ottico del fisheye con la verticale. La proiezione deve infatti essere centrata nel punto più alto della cupola, lo
zenit.
Tutti e sei i gradi di libertà, insieme a qualche altra piccola regolazione per
rendere l’utilizzo dell’apparato più confortevole, sono inseriti nel sistema mediante
un supporto regolabile del gruppo ottico che viene poi assemblato al videoproiettore
per mezzo di un telaio base. Questo, cosı̀ come tutti gli elementi di raccordo e di
messa a punto, è stato realizzato in alluminio serie 6000, una lega leggera a media
resistenza meccanica, per mezzo di una macchina a controllo numerico.
L’apparato è stato testato e allo stadio attuale la proiezione non presenta difetti
dal punto di vista né della qualità né della messa a fuoco dell’immagine; può quindi
essere già utilizzato per tutti gli scopi preposti, quali la didattica e la divulgazione
dell’Astronomia e della Scienza in generale.
Si è cercato in questo lavoro di esaminare in maniera globale l’argomento riguardante la ricostruzione delle posizioni dei corpi celesti e come questa può essere
implementata in un’esperienza visuale immersiva come quella del planetario digitale.
Introduzione
Nel capitolo 1 si forniscono alcuni concetti base di meccanica celeste, con l’intento
di comprendere come una trattazione analitica del problema gravitazionale dei due
corpi porti al calcolo delle posizioni dei corpi celesti. Dopo alcuni cenni storici sulle
effemeridi, viene presentata più in dettaglio la teoria delle Variations Séculaires des
Orbites Planétaires e si spiega come vengono calcolate le coordinate dei pianeti nella
soluzione VSOP87.
Nel successivo capitolo viene specificato come la soluzione VSOP87 è implementata nei codici sorgente di software planetari come Stellarium, il primo vero programma planetario moderno basato sulla riproduzione realistica del cielo mediante
computer grafica. Un breve excursus cronologico tra nascita e sviluppo dei planetari
conduce alla descrizione dei diversi tipi di apparati, analogici e digitali. Si approfondisce quindi il sistema digitale di proiezione, effettuando una panoramica sui vari
software planetari oggi in uso e mettendone in evidenza le caratteristiche principali.
Si riportano infine le motivazioni che portano alla scelta del programma Nightshade
Legacy come supporto per la simulazione virtuale del cielo.
Un apparato digitale, oltre a un software planetario accurato e funzionale, consiste anche in una struttura hardware che viene descritta dettagliatamente nel capitolo
3. Vengono presentati tutti gli elementi necessari alla proiezione e si discutono poi
le differenze tra i vari sistemi che proiettano immagini su una superficie sferica come
quella della cupola. A questo scopo diverse sono le opzioni oggi disponibili, sistemi
a molti proiettori, sistemi a proiettore singolo, utilizzo del fisheye o di uno specchio
sferico. La scelta, effettuata in base a criteri pratici, di utilizzo e di risorse economiche, è ricaduta sul sistema a proiettore singolo con obiettivo fisheye; viene qui
spiegato il perché.
Nel quarto capitolo trova ampio spazio l’argomento principale della Tesi, ovvero
il lavoro di progettazione e realizzazione dell’apparato sperimentale. Vengono brevemente descritte le caratteristiche degli elementi da assemblare, si discute l’analisi
del problema geometrico relativo all’allineamento delle ottiche e come è stato risolto
nelle realizzazione meccanica. La presentazione del lavoro è corredata di tavole e
disegni CAD, nonché di fotografie delle varie fasi della lavorazione.
Nell’ultimo capitolo si conclude discutendo le potenzialità di un tale apparato
sperimentale e i suoi possibili sviluppi futuri. Investimenti sempre più ingenti e
costanti vengono compiuti ad ampio spettro in tutti gli ambiti della Fisica e delle
Scienze, considerando il planetario come un potente strumento di didattica e divulgazione in cui lo spettatore si sente coinvolto e immerso in un’esperienza audio-visiva
totale.
Dopo la bibliografia, le cinque appendici finali riportano nell’ordine: la trattazione analitica completa del problema dei due corpi; una breve guida ai comandi
principali del sofware planetario Nightshade; il codice fortran della subroutine che
calcola le coordinate dei pianeti mediante la soluzione VSOP87; uno script che riproduce in automatico una serie di azioni, scritto con StratoScript di Nightshade; la
serie di tavole di progettazione dell’apparato sperimentale.
3
Capitolo 1
Elementi di meccanica celeste
Un apparato sperimentale per la ricostruzione delle posizioni dei corpi celesti può
essere utilizzato per diverse finalità, siano esse di tipo scientifico, didattico o divulgativo. Esistono diversi strumenti atti allo scopo, sia analogici, che consistono cioè in
sistemi opto-meccanici, sia digitali, che sfruttano le potenzialità di un computer con
software dedicato. La prima caratteristica che devono soddisfare tutti gli apparati è
sicuramente l’affidabilità in termini di accuratezza e precisione delle misure di posizione, la quale viene garantita specificando gli errori entro intervalli temporali ben
precisi. Per questo, nella scelta del sistema più idoneo allo scopo che ci si prefigge, è
necessario sempre in prima analisi assicurarsi che dietro le prestazioni dell’apparato
ci sia una solida base scientifica e di calcolo.
In ambito astronomico, la determinazione delle posizioni degli oggetti in cielo
si basa sui principi della meccanica celeste, laddove si vanno a combinare la gravitazione universale di Newton, le leggi di Keplero, le leggi del moto ed elementi
di relatività generale. In questo primo capitolo si farà una panoramica sommaria
sull’argomento, con un approccio che non è in alcun modo da ritenersi esaustivo, ma
che fornirà gli elementi di base utili per gli intenti di questo lavoro di Tesi.
1.1
Stelle fisse e stelle erranti
Ogni qual volta si abbia a che fare con il firmamento e con la miriade di corpi celesti
di cui esso è costellato, si noterà che esiste una certa classe di oggetti in movimento
e un’altra invece di oggetti fermi. Infatti, già nell’antichità classica questa divisione
si rifletteva nelle denominazioni di stellae fixae e stallae errantes. Per “stelle fisse”
si intendevano tutti quegli oggetti celesti che non sembrano spostarsi in relazione
alle stelle del cielo notturno, vale a dire tutte le stelle eccezion fatta per il Sole, ma
anche nebulose e altri oggetti di questo tipo. Le stelle erranti, o πλάνητες αστέρες
(plànētes astéres) in greco, da cui il termine italiano “pianeta”, erano i sette oggetti
non fissi visibili in cielo, cioè il Sole, la Luna e gli altri cinque pianeti: Mercurio,
Venere, Marte, Giove e Saturno. Sono questi i sette pianeti del mondo antico, e
non a caso i sette giorni della settimana portano i loro nomi. Oggi sappiamo che i
pianeti, nel senso moderno del termine, diventano otto quando alla Terra e ai cinque
5
6
1. Elementi di meccanica celeste
già citati si aggiungono Urano, scoperto nel 1781, e Nettuno, nel 18461 .
I pianeti si spostano e cambiano la loro posizione in cielo rispetto alle stelle fisse su
periodi di tempo brevi, dell’ordine delle settimane o dei mesi, sempre restando nella
fascia dello zodiaco2 . D’altro canto, anche le stelle cosiddette “fisse” non sono affatto
fisse. Sono infatti soggette, oltre al moto apparente dovuto alla rotazione e alla
rivoluzione della Terra, a un moto proprio nella direzione parallela e perpendicolare
alla linea di vista; tuttavia la loro distanza dalla Terra rende gli effetti di questi moti
del tutto trascurabili su brevi scale temporali.
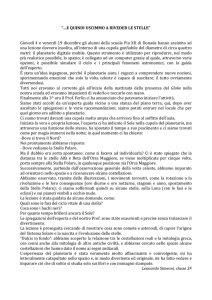
Zenit
NCP
Equatore
Celeste
E
N
NP
S
SP
Meridiano
Celeste
W
Orizzonte
SCP
Nadir
Figura 1.1: La sfera celeste e i punti di riferimento.
Ciò che non è affatto trascurabile, però, è il modo in cui il cielo appare a un
osservatore sulla Terra, ed è questo il punto di partenza per lo studio dei movimenti
celesti. Guardando il cielo si perde il senso delle distanze relative, tanto da avere
la sensazione che tutti i corpi celesti siano incastonati su una grande sfera al centro
della quale si trova la Terra. Questa superficie, solo apparente, viene chiamata sfera
celeste (fig. 1.1) e su di essa si individuano i riferimenti che ci aiutano a seguire i
corpi celesti nel loro movimento. Alcuni di questi riferimenti non sono altro che gli
analoghi riferimenti terrestri estesi allo spazio che circonda la Terra. A differenza dei
riferimenti locali, che dipendono cioè dal luogo di osservazione, sulla sfera celeste si
individuano alcuni riferimenti assoluti, indipendenti dalla posizione dell’osservatore.
L’asse terrestre di rotazione interseca la sfera celeste in due punti, il polo nord celeste
(NCP) e il polo sud celeste (SCP). Allo stesso modo si definisce equatore celeste la
1
Plutone, scoperto nel 1930 e inizialmente annoverato come nono pianeta, è stato riclassificato
come pianeta nano nel 2006.
2
Regione della volta celeste che si estende di circa 8 gradi in latitudine celeste a nord e a sud
dell’eclittica, all’interno della quale si trovano anche le dodici costellazioni dello zodiaco.
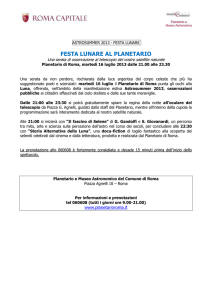
1.1 Stelle fisse e stelle erranti
Figura 1.2: Fotografia a lunga posa che mostra il movimento circolare apparente
delle stelle attorno al polo celeste, in questo caso quello sud.
proiezione dell’equatore terrestre sulla sfera. Lo zenit è il punto della sfera celeste
che giace esattamente sopra la testa dell’osservatore. Individuati zenit, polo nord
celeste e polo sud celeste, si definisce meridiano celeste il cerchio massimo che li
congiunge. I poli celesti sono un esempio di riferimento assoluto, zenit e meridiano
celeste sono riferimenti relativi.
La sfera celeste appare muoversi da est verso ovest a causa del moto di rotazione
della Terra attorno al proprio asse. Questo movimento, centrato sui poli celesti,
viene individuato nell’emisfero boreale dalla Stella Polare. Le stelle fisse percorrono
orbite circolari apparenti parallele all’equatore celeste e centrate sulla Stella Polare,
di raggio tanto più grande quanto maggiore è la loro distanza dal polo (vedi fig.
1.2). Nel nostro emisfero alcune stelle vicine al polo nord celeste non tramontano
mai (stelle circumpolari nord), mentre altre non sorgono mai (stelle circumpolari
sud) in quanto prossime al polo sud celeste. Un qualunque sistema per il calcolo
delle posizioni dei corpi celesti deve essere in grado di “inseguire” il moto apparente
degli oggetti diurni e delle stelle fisse e il modo più conveniente di farlo è utilizzare
opportune matrici di rotazione.
Si consideri un oggetto di cui si conosce la posizione iniziale in un certo sistema
di riferimento, sia esso celeste, terrestre o locale (centrato ad esempio nel punto in
cui si trova l’osservatore). Il sistema di riferimento varia nel tempo in conseguenza
di vari fattori: la rotazione terrestre sul proprio asse, la precessione, la nutazione e lo
spostamento del polo, dovuto a cause di natura geofisica. L’asse di rotazione terrestre
(e quindi il piano equatoriale), non è fisso nello spazio rispetto alle stelle fisse, ma
ruota attorno al polo dell’eclittica. Questo moto è dovuto agli effetti dell’attrazione
gravitazionale della Luna, del Sole e dei pianeti maggiori sul globo terrestre. Il
movimento totale può essere separato in una componente secolare (la precessione),
con un periodo di circa 26000 anni, e una componente periodica (la nutazione), con
7
8
1. Elementi di meccanica celeste
periodo di circa 18,6 anni. L’asse di rotazione, inoltre, non è fermo rispetto alla crosta
terrestre, ma si sposta a causa delle variazioni nella distribuzione in massa della
Terra: il polo si sposta entro un quadrato di circa 20 metri in relazione a un punto
con coordinate fisse sulla superficie terrestre. Questo moto ha un periodo di circa
430 anni. Un altro effetto che, seppur ridotto, è da tenere in conto è quello dovuto
al rallentamento della rotazione terrestre causato dall’attrazione gravitazionale della
Luna.
Per una certa epoca t, l’evoluzione temporale della posizione dell’oggetto si traduce in una trasformazione tra sistemi di coordinate, eseguita matematicante mediante
l’applicazione successiva di matrici di rotazione (cfr. [8]):
[T RF ] = RM (t) RS (t) N (t) P (t) [CRF ]
dove [CRF ] esprime il vettore coordinate nel sistema di riferimento celeste, [T RF ]
quello nel sistema di riferimento terrestre, P è la matrice della trasformazione associata alla precessione, N la matrice della trasformazione associata alla nutazione,
RS la matrice della trasformazione associata alla rotazione della Terra attorno all’asse polare, RM la matrice di trasformazione associata al moto del polo. Tutte le
matrici sono calcolate all’epoca t. La matrice di rotazione diurna RS definisce la
rotazione attorno al polo celeste di un angolo Θ:
cos Θ sin Θ 0
RS (t) = − sin Θ cos Θ 0
0
0
1
dove Θ è l’angolo orario misurato in tempo siderale3 .
Oltre a dover tener conto dei moto apparenti del cielo, i programmi planetari
devono essere provvisti di strumenti che calcolino le orbite, le posizioni e le velocità
dei corpi celesti in maniera corretta, entro certi errori. Vedremo nei prossimi paragrafi come sono calcolati questi dati e come vengono implementati in un software.
Questa esigenza nasce dal fatto che si devono poter individuare le posizioni dei corpi
celesti, come i pianeti, che mutano la loro posizione in cielo in maniera assoluta e
relativa, secondo effetti che possono essere a lungo o breve termine. Il problema,
abbastanza complesso, del calcolo delle orbite sarà affrontato più in dettaglio nella
trattazione dei parametri orbitali e del calcolo delle effemeridi.
1.2
Le effemeridi
L’Astronomia si è sempre occupata di stabilire con precisione la posizione dei corpi
celesti nello spazio e osservazioni sempre più accurate e scrupolosi calcoli geometrici
3
Il tempo siderale è il tempo che impiega la Terra a compiere un giro completo rispetto alle
stelle. Il tempo comunemente utilizzato è, invece, il tempo solare, la cui unità fondamentale è il
giorno solare, ovvero il tempo impiegato dal Sole a percorrere 360 gradi nel cielo, come effetto della
rotazione terrestre.
1.2 Le effemeridi
hanno consentito la costruzione di modelli del Sistema Solare che descrivessero il
moto dei pianeti e di tutti gli altri oggetti orbitanti, quali satelliti, comete e asteroidi.
Fino al XVIII secolo, future posizioni planetarie continuavano ad essere predette estrapolando posizioni osservate in passato, utilizzando tavole astronomiche come quelle pubblicate da Jacques Cassini, figlio del celebre astronomo italiano Gian
Domenico Cassini, nella raccolta “Tables astronomiques du soleil, de la lune, des
planetes, des etoiles fixes, et des satellites de Jupiter et de Saturne” del 1740.
Le effemeridi, dalla parola greca ὲφημερίς (ephemeris), giornaliero, sono di fatto
tabelle contenenti le posizioni in cielo di oggetti astronomici, calcolate nel corso di
un particolare intervallo di tempo. Storicamente consistevano in tavole stampate,
oggi vengono calcolate per via elettronica a partire da modelli matematici, sebbene
effemeridi stampate siano ancora utilizzate sia in astronomia sia in aeronautica.
Tramite le effemeridi si possono innanzitutto anticipare le posizioni degli astri e
quindi indirizzare le osservazioni visuali o astronomiche. In particolare, quando si
utilizzano strumenti di osservazione come i telescopi, le effemeridi sono fondamentali
per trovare immediatamente gli astri nel cielo, pianificare osservazioni a lungo e
breve termine e identificare gli stessi astri presenti nel campo di osservazione dello
strumento.
1.2.1
Un po’ di storia...
Le effemeridi venivano utilizzate già nell’antichità dai popoli della Mesopotamia e
dalle popolazioni precolombiane: anticamente erano libri in cui venivano registrati
giorno per giorno gli atti del re. Famose sono quelle di Alessandro Magno e quelle
romane; in epoca più recente è di particolare rilievo La Connaissance des Temps,
giornale che su base annua pubblica effemeridi dal 1679. Affidate dal 1795 al “Bureau des longitudes”, istituzione francese che vide tra i suoi primi membri Lagrange
e Laplace, sono le più antiche effemeridi astronomiche a stampa, ma detengono anche il primato di essere pubblicate senza interruzione dalla loro fondazione fino ai
giorni nostri (oggi l’istituto si chiama “Institut de mécanique céleste et de calcul des
éphémérides” (IMCCE), in italiano: Istituto di meccanica celeste e di calcolo delle
effemeridi).
9
10
1. Elementi di meccanica celeste
Cronologia
• 2000 a.C. - Tavole di Panchanga basate su Jyotisha, periodo vedico dell’astronomia indiana;
• 1000 a.C. - effemeridi nell’astronomia babilonese;
• II secolo d.C. - Almagesto e Tavole manuali di Tolomeo;
• VIII secolo d.C. - Zij (libro astronomico islamico) di Ibrahim al-Fazari;
• IX secolo d.C. - Zij di Muhammad ibn Musa al-Khwarizmi;
• XII secolo d.C. - Tavole di Toledo: basate principalmente su fonti di astronomia islamica, modificate da Gerardo da Cremona costituirono le effemeridi
standard europee fino alle tavole Alfonsine (1252 ca.);
• XIII secolo d.C. - Tabelle Ilkhanic (Persia);
• XIII secolo d.C. - Tavole Alfonsine, volute da Alfonso X re di Castiglia, compilate in Spagna per correggere anomalie nelle Tavole di Toledo, utilizzate come
effemeridi standard in Europa fino alle Tavole Pruteniche, quasi trecento anni
più tardi;
• 1408 - Tavole Cinesi (copia conservata alla Pepys Library, Cambridge, Regno
Unito);
• 1496 - Almanacco Perpetuo di Abraão ben Samuel Zacuto (uno dei primi libri
pubblicati in Portogallo con una macchina da stampa a caratteri mobili);
• 1504 - Arenatosi sulle coste della Giamaica nel suo quarto viaggio verso le
Americhe, Cristoforo Colombo predisse con successo un’eclissi di Luna, usando
le effemeridi di Regiomontano, astronomo tedesco;
• 1551 - Tavole Pruteniche di Erasmus Reinhold, anche note come tavole prussiane in onore di Alberto I, Duca di Prussia, che finanziò la pubblicazione; si
basavano sul De revolutionibus orbium coelestium di Niccolò Copernico;
• 1554 - Johannes Stadius, astronomo fiammingo, pubblicò le Ephemerides novae at auctae, le prime importanti effemeridi calcolate secondo il modello
eliocentrico di Copernico, utilizzando le Tavole Pruteniche;
• 1627 - Tavole Rudolfine di Giovanni Keplero, basate su moti planetari ellittici,
diventarono il nuovo standard;
• 1679 - La Connaissance des Temps ou calendrier et éphémérides du lever et
coucher du Soleil, de la Lune et des autres planètes, pubblicazione annuale
redatta per la prima volta da Jean Picard. Dal 1795 la pubblicazione è affidata
al “Bureau des longitudes”.
1.2 Le effemeridi
1.2.2
Effemeridi moderne
In ambito scientifico le effemeridi planetarie moderne si basano sull’utilizzo di modelli numerici che generano le posizioni dei pianeti e, spesso, anche dei loro satelliti,
degli asteroidi o anche delle comete, ad un tempo qualunque stabilito dall’utilizzatore; tipicamente queste effemeridi coprono tempi su scala delle centinaia di anni,
nel passato e nel futuro. Nonostante esistano teorie più o meno accurate di meccanica celeste, alcuni fenomeni secolari, vale a dire quei fenomeni che si manifestano
con periodi estremamente lunghi4 , non possono essere tenuti in conto in maniera
adeguata dalle effemeridi. Le incertezze più grandi nella posizione dei pianeti sono causate dalle perturbazioni gravitazionali dovute agli altri pianeti, ma anche dei
numerosi asteroidi, la maggior parte dei quali posseggono masse e orbite conosciute
solo approssimativamente, il che rende incerto il loro effetto.
Il JPL (Jet Propulsion Laboratory) della NASA pubblica effemeridi aggiornate
ogni venti anni, includendo di volta in volta il contributo apportato da nuovi dati e
osservazioni. Effemeridi del Sistema Solare sono essenziali per la navigazione aerospaziale e per tutte le osservazioni che riguardano pianeti, satelliti naturali, stelle e
galassie. Contengono dati sulla posizione dei corpi celesti specificandone declinazione e ascensione retta, ovvero le coordinate più frequentemente utilizzate per telescopi
e mappe stellari. Insieme ai dati è sempre specificata l’epoca di riferimento; si può
scegliere l’epoca attuale o una data standard, tipicamente J2000, corrispondente al
1 gennaio 2000 alle ore 12:00 TT (Tempo Terrestre, differisce di pochi secondi dal
sistema UTC). Il prefisso “J” sta ad indicare che è una data giuliana.
Effemeridi scientifiche contengono spesso ulteriori dati utili sulla Luna, i pianeti,
gli asteroidi o le comete: magnitudine, elongazione dell’orbita, distanza, velocità,
diametro apparente nel cielo, orario di alba e tromonto, solo per citarne alcuni.
Le effemeridi di Saturno, a volte, includono anche l’inclinazione apparente dei suoi
anelli. La posizione sulla Terra è determinante per il calcolo delle effemeridi: sono
infatti solitamente valide solo per una data posizione sulla superficie della Terra
e, sebbene in molti casi le differenze siano trascurabili, talvolta bisogna tenere in
considerazione questo dato in più. Nel caso di asteroidi vicini o della Luna, ad
esempio, le discrepanze possono essere rilevanti.
I satelliti di navigazione GPS trasmettono dati di effemeridi elettroniche che
possono essere usati da un ricevitore per calcolare la propria posizione esatta per
trilaterazione5 .
Altre effemeridi moderne di recente sviluppo sono le EPM (Ephemerides of Planets and Moon) dell’Istituto Russo di Astronomia Applicata e i modelli del sopra
citato IMCCE francese. Il contributo di quest’ultimo si sviluppa secondo due approc4
Ne è un esempio la precessione degli equinozi, cioè la rotazione dell’asse terrestre attorno alla
verticale, simile a quella di una trottola, causata dalla combinazione di due fattori: la non perfetta
sfericità della Terra (che è uno sferoide oblato, sporgente all’equatore) e le forze gravitazionali della
Luna e del Sole che, agendo sulla sporgenza equatoriale, cercano di allineare l’asse della Terra con
la perpendicolare al piano dell’eclittica. Il risultato è un moto di precessione che compie un giro
completo ogni 26000 anni circa.
5
Tecnica che permette di calcolare distanze fra punti, avvalendosi della misura dei lati di triangoli
adiacenti. Da non confondere con la tecnica di triangolazione che, invece, sfrutta le ampiezze degli
angoli.
11
12
1. Elementi di meccanica celeste
ci diversi: il modello INPOP (Integration Numerique Planetaire de l’Observatoire de
Paris), di tipo numerico, e il VSOP (Variations Séculaires des Orbites Planétaires),
di tipo analitico.
Il problema principale cui cercano di trovare una soluzione tutti questi modelli
è che un pianeta come la Terra non è attratto per via gravitazionale soltanto dal
Sole. Se cosı̀ fosse basterebbe costruire semplici modelli ideali le cui orbite risultanti
sarebbero ellissi kepleriane, di forma e orientazione costanti. In realtà, mentre i
pianeti giacciono sempre su orbite all’incirca kepleriane, queste variano la loro struttura lentamente nel tempo a causa degli effetti gravitazionali che su gradi diversi
hanno la Luna, i pianeti interni ed esterni e ogni altro oggetto del Sistema Solare.
Queste forze causano delle perturbazioni sull’orbita, che variano nel tempo e non
possono essere calcolate con precisione. Modelli planetari sempre più complessi, sia
numerici sia analitici, sono ormai in grado di valutare con accuratezza questi fattori
perturbativi e consentono di conoscere in dettaglio sempre maggiore la posizione dei
pianeti. Ad oggi la differenza tra i risultati dei modelli e le osservazioni è sufficientemente sottile da lasciar intendere che non ci siano mancanze o inesattezze nella
fisica fondamentale di questi modelli.
1.3
Parametri orbitali
Un’orbita planetaria viene univocamente definita da un set di parametri, detti elementi orbitali o parametri kepleriani. In uno scenario classico di meccanica celeste
a due corpi, nel quale sono coinvolte orbite kepleriane6 derivate dalle leggi del moto
e dalla gravitazione universale di Newton, esistono molti modi diversi per descrivere
la stessa orbita, ad esempio i vettori di stato orbitali r e v, ma alcuni sono più convenienti di altri e per questo più comunemente usati in astronomia. Poiché un’orbita
di tipo kepleriano possiede sei gradi di libertà, due per ogni dimensione spaziale, il
set di parametri da utilizzare è composto da sei elementi che prendono appunto il
nome di parametri kepleriani, in onore di Keplero e delle sue celebri leggi del moto
planetario.
Se ci si pone in un sistema di riferimento inerziale, due corpi orbitanti disegnano
traiettorie distinte, ognuna con il fuoco nel centro di massa comune. Ponendosi nel
sistema di riferimento di uno dei due oggetti (primario), risulterebbe visibile soltanto la traiettoria dell’altro (secondario); gli elementi orbitali kepleriani descrivono
proprio queste traiettorie “non inerziali”. L’eccentricità e la lunghezza del semiasse maggiore definiscono rispettivamente forma e dimensione dell’ellisse; inclinazione
e longitudine del nodo ascendente determinano l’orientazione del piano orbitale su
cui giace l’ellisse; l’argomento del periapside e anomalia media all’epoca completano
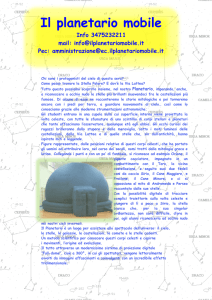
l’insieme. Facendo riferimento alla fig. (1.3):
• eccentricità (e): determina l’elongazione dell’ellisse rispetto a un cerchio;
• semiasse maggiore (a): semisomma delle distanze di periapside e apoapside,
ovvero i punti in cui i due corpi sono più vicini o più lontani rispettivamente;
6
Un’orbita reale cambia nel tempo a causa delle perturbazioni gravitazionali prodotte da altri
oggetti e a causa di effetti relativistici; un’orbita kepleriana è un’approssimazione matematica
ideale.
1.3 Parametri orbitali
13
Periapside
Piano di
riferimento
ν
ω
Ω
a
i
Figura 1.3: Il piano fondamentale è individuato dall’ellisse in grigio, mentre l’orbita
segue la linea tratteggiata. I parametri orbitali sono indicati dai rispettivi simboli.
• inclinazione (i): oscillazione verticale dell’orbita rispetto al piano di riferimento, misurata al nodo ascendente (punto in cui l’oggetto orbitante passa
attraverso il piano da sud a nord, si indica con );
• longitudine del nodo ascendente (Ω): orientazione del nodo ascendente
rispetto al punto vernale () del sistema di riferimento;
• argomento del periapside (ω): orientazione dell’ellisse sul piano orbitale,
misurata come angolo tra il nodo ascendente e il periapside;
• anomalia media all’epoca (M0 ): posizione dell’oggetto lungo l’orbita a un
tempo specifico (l’epoca). È una grandezza che non corrisponde a un vero
angolo geometrico, ma può essere convertito nell’anomalia vera (ν), cioè l’angolo nel piano dell’orbita individuato dalla posizione dell’oggetto rispetto al
periapside. In alcuni casi questo parametro è sostituito dalla longitudine media
all’epoca (L0 ), ovvero la longitudine alla quale si troverebbe l’oggetto in orbita
se questa fosse circolare.
Noti i vettori di stato r e v è possibile passare agevolmente alle costanti del moto
e ai sei parametri orbitali; infatti, nelle ipotesi di moto centrale senza perturbazioni
(problema dei due corpi), cinque dei sei parametri si conservano nel tempo (tranne
l’anomalia vera) e di conseguenza è più semplice la definizione dell’orbita.
1.3.1
Il problema dei due corpi
In meccanica classica per determinare il moto di due punti materiali che interagiscono
solo l’uno con l’altro, si considera un sistema composto da due corpi sotto l’azione di
forze centrali per le quali vale il terzo principio della dinamica. Esempi classici sono
14
1. Elementi di meccanica celeste
z
A
O
y
Ω
L
i
x
Figura 1.4: Sistema di riferimento in cui l’oggetto si sposta da L ad A su un orbita
inclinata di un angolo i.
un satellite che orbita attorno a un pianeta, un pianeta che orbita attorno alla sua
stella, due stelle che orbitano uno attorno all’altra (sistema binario), o ancora un
elettrone che orbita attorno al nucleo (anche se in questa caso una trattazione più
rigorosa prevede un approccio quantistico). Per una trattazione analitica dettagliata
si rimanda all’appendice A, qui di seguito verranno esposti solo gli aspetti generali
del problema.
Partendo dalle equazioni del moto per due corpi sferici di massa m1 e m2 sotto
l’azione della legge di gravitazione di Newton:
F =−G
m1 m2
r̂,
r2
dove G è la costante di gravitazione universale, r la distanza fra i due corpi e r̂ il
versore di direzione, si sviluppa il problema del moto relativo rispetto al centro di
massa M = m1 + m2 .
Si ottengono delle semplici relazioni che definiscono in maniera univoca gli angoli
i e Ω (figura 1.4), che a loro volta determinano univocamente la posizione del piano
orbitale, in funzione delle costanti di integrazione:
a1 = + C cos i;
a2 = ± C sin i sin Ω;
(1.1)
a = ∓ C sin i cos Ω,
3
dove nella seconda e terza equazione è da prendere il segno superiore quando i < 90
e il segno inferiore quando i > 90, ovvero se a1 è positivo o negativo (dalla prima
delle tre equazioni).
1.3 Parametri orbitali
15
Dal momento che l’orbita giace su un piano ben determinato, è possibile poi
scegliere gli assi in modo tale che l’ascissa e l’ordinata siano su questo stesso piano.
Si ricavano allora le seguenti espressioni che legano gli elementi orbitali alle nuove
costanti di integrazione c1 , c2 , c3 e c4 :
c2
p = 21 ;
kM
c21 c3
2
;
e
=
1
+
k4M 2
ω = c4 − π;
(1.2)
p
M p;
c
=
k
1
k 2 (1 − e2 )
c
=
−
M;
3
p
2A0 − c2
T =
,
c1
dove k è una costante legata a G, p il semilato retto dell’ellisse ed M l’anomalia
media. Il tempo T del passaggio al perielio è talvolta sostituito da altri parametri,
quali l’anomalia media e l’anomalia eccentrica, essendo valida tra tali grandezze la
seguente relazione:
(1.3)
n(t − T ) = M = E − e sin E,
in cui n, M ed E sono rispettivamente il moto angolare medio (pari a 2π/P ), l’anomalia media e l’anomalia eccentrica. L’equazione (1.3), detta anche equazione di
Keplero, consente di calcolare M ed E, una volta conosciuto il valore di T . La scelta
del parametro più conveniente da utilizzare dipende dal sistema che si sta analizzando e, ovviamente, dalle grandezze note.
Una volta che si è in possesso dei parametri orbitali, è possibile calcolare le
posizioni sulle orbite utilizzando le leggi del moto e le leggi di Keplero. Molti metodi analitici sono stati studiati per risolvere il problema nei vari casi, e per una
trattazione matematica più completa si rimanda al testo di Moulton (cfr. [5]), nel
quale in particolare sono ricavate con precisione le equazioni da utilizzare nel caso
di traiettoria ellittica (orbite planetarie) o parabolica (comete).
1.3.2
Trasformazioni di coordinate
La determinazione delle posizioni dei corpi celesti è naturalmente vincolata al sistema di assi coordinati scelto. La scelta più ovvia per quanto riguarda il moto dei
pianeti nel Sistema Solare è quella di tenere fissa l’origine sul Sole; in questo caso
le coordinate saranno dette eliocentriche. Ci si riferisce solitamente a due sistemi di
coordinate eliocentriche, il sistema eclittico e il sistema equatoriale: il piano fonda-
16
1. Elementi di meccanica celeste
mentale è rappresentato nel primo caso dal piano dell’orbita terrestre, mentre nel
secondo dal piano dell’equatore. In entrambi i sistemi il punto di riferimento è l’equinozio di primavera, cioè il punto in cui l’eclittica interseca l’equatore celeste da
sud a nord, individuato dal punto gamma. Le coordinate polari nel sistema eclittico
prendono il nome di longitudine (l) e latitudine (b), mentre in quello equatoriale
sono l’ascensione retta (a) e la declinazione (d).
Nella pratica astronomica si usano molto spesso ascensione retta e declinazione,
ad esempio per dare le posizioni assolute di stelle di riferimento o le posizioni osservate di comete, determinate in relazione alle prime. Ma in alcuni casi, come la
mutua interazione di pianeti e comete, è conveniente usare il sistema eclittico; per
questo è necessario saper passare da un sistema all’altro, trasformando le equazioni
in gioco.
Anche qui i valori di longitudine e latitudine eliocentriche possono essere calcolati
a partire dai parametri orbitali (cfr. [5]):
tan(l − Ω) = tan u cos i;
(1.4)
tan b = tan i sin (l − Ω).
Passando a un sistema di coordinate
ρ cos β cos (λ − Λ) = r
ρ cos β sin (λ − Λ) = r
(1.5)
ρ sin β = r
geocentriche si trova che:
cos b cos (l − Λ) + P cos B;
cos b sin (l − Λ);
sin b + P sin B,
dove ρ, λ e β sono distanza, longitudine e latitudine geocentriche dell’oggetto, P , Λ
e B distanza, longitudine e latitudine geocentriche del Sole.
Per ottenere la trasformazione in coordinate equatoriali geocentriche si consideri
l’angolo di inclinazione tra il piano dell’eclittica e il piano dell’equatore; il sistema
di coordinate equatoriali può essere ottenuto mediante una rotazione del sistema
dell’eclittica attorno all’asse x nella direzione negativa, di un angolo pari a . In
coordinate polari si ottiene allora:
cos δ cos α = cos β cos λ;
cos δ sin α = cos β sin λ cos − sin β sin ;
(1.6)
sin δ = cos β sin λ sin + sin β cos ,
dove α e δ sono ascensione retta e declinazione geocentriche.
Le coordinate equatoriali geocentriche possono essere ricavate in maniera diretta
dagli elementi orbitali i e Ω senza prima dover passare per il calcolo delle coordinate
eclittiche: il metodo analitico di Gauss descritto sempre in [5] mette in relazione
α e δ con le coordinate rettangolari geocentriche dell’oggetto e del Sole, riferite al
sistema equatoriale. Queste coordinate vengono fornite per ogni giorno dell’anno in
diverse pubblicazioni di effemeridi, come ad esempio gli “Almanacchi Nautici”.
1.4 Teorie planetarie: il modello VSOP
1.4
Teorie planetarie: il modello VSOP
Il problema dei due corpi è sicuramente un modello esemplificativo per la trattazione
della dinamica dei corpi celesti all’interno del Sistema Solare, ma non può in alcun
modo essere considerato completo ed esaustivo. Questo perché non tiene conto delle
interazioni gravitazionali con altri oggetti, che nella situazione reale hanno invece
un ruolo deteminante. Si deve a questo scopo ricorrere a una teoria perturbativa
che tenga in considerazione gli effetti che su diverse scale vanno a modificare nel
tempo le semplici orbite kepleriane. In tal senso vengono in aiuto modelli numerici
e analitici che utilizzano sviluppi in serie periodiche che sono funzioni del tempo, ed
è solo grazie all’ausilio dei computer che l’enorme numero di calcoli e dati può essere
trattato e fatto convergere a una teoria completa del fenomeno.
Il modello planetario semi-analitico VSOP, ovvero Variations Séculaires des Orbites Planétaires (Variazioni secolari delle orbite planetarie), descrive i cambiamenti
a lungo termine nelle orbite dei pianeti. È un avanzato strumento astronomico che
risulta assai utile quando si vuole determinare con estrema accuratezza dove i pianeti sono ora, sono stati e saranno in un intervallo di tempo di migliaia di anni.
Precisione, compattezza e immediata disponibilità sono fra i principali vantaggi di
questo sistema, che lo hanno reso il più utilizzato oggi per i calcoli planetari; molti software planetari in commercio, come ad esempio Stellarium e Celestia, hanno
VSOP implementato nei loro codici7 . Essendo le interazioni di tipo gravitazionale, le
ampiezze delle perturbazioni relative sono funzioni delle masse dei pianeti. Il problema principale sta quindi nella determinazione delle masse, che può essere compiuta
mediante l’osservazione del periodo di rotazione dei satelliti di ogni pianeta, oppure
la deflessione gravitazionale subita da oggetti in movimento in prossimità dei pianeti
stessi; naturalmente un maggior numero di osservazioni produce maggiore accuratezza. Le perturbazioni di breve periodo (dell’ordine di qualche anno) possono essere
determinate in maniera semplice; sono quelle a lungo termine (decine e centinaia
di anni) le più complesse da calcolare, ma anche quelle che producono effetti più
importanti nell’arco dei millenni. La difficoltà sta nel fatto che misure precise per
questo genere di effetti esistono solo su periodi non sufficientemente lunghi, il che
potrebbe renderli indistinguibili da termini costanti.
I risultati di una prima versione della teoria furono pubblicati nel 1982 (cfr. [2]):
la soluzione VSOP82 è costruita sulle perturbazioni sviluppate fino al terzo ordine
nelle masse dei pianeti. Per i quattro pianeti esterni (Giove, Saturno, Urano e Nettuno) sono considerate perturbazioni fino al sesto ordine, ottenute mediante processo
iterativo; sono contenute anche le perturbazioni della Luna gli effetti relativistici.
Le costanti di integrazione sono determinate per confronto con i modelli numerici
DE2008 del JPL (cfr. [6]).
Le perturbazioni sono ottenute per integrazione delle equazioni di Lagrange
sviluppate in rapporto alle masse:
σ̇ = fσ (xi )
7
8
Il codice sorgente C++ è consultabile nella cartella /src/planetsephems/ del programma.
Development Ephemeris versione 200, modelli matematici usati dalla NASA.
17
18
1. Elementi di meccanica celeste
dove xi = x(0)
+ ∆(1) xi + ∆(2) xi è uno degli elementi orbitali dei due corpi. x(0)
rapi
i
(1)
presenta la soluzione kepleriana, ∆ xi l’ensemble di perturbazioni al primo ordine
dell’elemento xi , ∆(2) xi l’ensemble di perturbazioni al secondo ordine.
Per ottenere i termini perturbativi si scrive lo sviluppo in serie di Taylor di σ̇ e
si integrano i termini corrispettivi:
(0)
i
σ̇ = fσ (x ) +
12 X
∂fσ
∂xi
i=1
(1)
∆ xi +
12 X
∂fσ
i=1
∂xi
∆(2) xi +
(1.7)
12
12
1 XX
+
2 i=1 j=1
∂ 2 fσ
∂xi ∂xj
∆(1) xi ∆(2) xj .
L’integrazione di fσ (x(0)
i ) permette di calcolare i termini perturbativi del primo
(1)
ordine ∆ xi ; l’integrazione di
12 X
∂fσ
i=1
∂xi
∆(1) xi
permette di determinare i termini del secondo ordine ∆(2) xi ; l’integrazione del resto
porta ai termini del terzo ordine ∆(3) xi .
Le soluzioni sono rappresentate nelle variabili a, λ, k, h, q e p con:
k = e cos ω̃;
h = e sin ω̃;
(1.8)
i
q = sin cos Ω;
2
p = sin i sin Ω,
2
dove a è il semiasse maggiore, λ la longitudine media del pianeta, e l’eccentricità
dell’orbita, ω̃ la longitudine del perielio, i l’inclinazione e Ω la longitudine del nodo
ascendente.
Un problema pratico di questa prima versione del VSOP è che basandosi su
lunghe serie di termini perturbativi per i soli parametri orbitali, non è chiaro dove
sia necessario troncare le serie affinché le soluzioni utili per la determinazione delle
posizioni degli oggetti siano sufficientemente accurate. Questo limite è stato superato
con la versione VSOP87 che fornisce anche serie di termini direttamente per le
posizioni.
1.4 Teorie planetarie: il modello VSOP
1.4.1
La soluzione VSOP87
Questa seconda soluzione della teoria VSOP, implementata nel software planetario
Stellarium utilizzato in questo progetto, si concentra soprattutto sui termini di lungo
periodo e, sebbene il metodo di calcolo sia simile, raggiunge un maggior livello di
accuratezza rispetto alla precedente. Contiene le interazioni newtoniane fra gli otto
pianeti, le perturbazioni della Luna sul baricentro Terra-Luna e su tutti gli altri
pianeti e le perturbazioni relativistiche espresse in coordinate isotrope. VSOP87
garantisce per Mercurio, Venere, il baricentro Terra-Luna e Marte una precisione
pari a 100 per 4000 anni prima e dopo J2000; la stessa precisione è assicurata per i
pianeti Giove e Saturno per un periodo di 2000 anni; per Urano e Nettuno, infine, il
periodo in cui si rientra nell’errore di 100 è di 6000 anni prima e dopo J2000. La teoria
è stata migliorata e ampliata anche sviluppando calcoli in coordinate rettangolari e
sferiche, oltre a quelle ellittiche.
I sei elementi orbitali sarebbero costanti senza le perturbazioni e per questo
vengono presi come ordine zero su cui basare la teoria. Introducendo i termini
perturbativi, i parametri variano lentamente e ci si può fermare nello sviluppo ai
termini necessari o desiderati. Il risultato è rappresentato dai valori degli elementi
in un tempo specifico, che possono essere utilizzati per calcolare le posizioni sia in
coordinate rettangolari (X, Y , Z) sia in coordinate sferiche (longitudine L, latitudine B e distanza eliocentrica r). Per passare da un sistema di riferimento a un altro,
le coordinate rettangolari risultano più semplice da usare: traslazioni (ad esempio
nel cambio da coordinate eliocentriche a geocentriche) si effettuano mediante somme vettoriali, mentre rotazioni (ad esempio nel cambio da coordinate eclittiche a
equatoriali) si effettuano moltiplicando matrici.
Nelle soluzioni VSOP87 le coordinate di lunghezza sono misurate in a.u., mentre
quelle angolari in radianti. Sono funzioni esplicite del tempo scritte in forma di serie
periodiche e serie di Poisson, del tipo:
(1.9)
T α (S sin ϕ + K cos ϕ) = T α A cos (B + CT ),
dove T viene calcolato in migliaia di anni giuliani a partire dall’epoca J2000 tale che
T = (data giuliana − 2451545)/365250, la potenza α di T è un numero intero tra 0
e 5, l’argomento ϕ è definito da:
ϕ=
12
X
ai λ i
i=1
in cui i coefficienti ai sono numeri interi. Le quantità λi , per i che va da 1 a 8,
rappresentano le longitudini medie degli otto pianeti, mentre per i che va da 9
a 11 rappresentano rispettivamente elongazione lunare rispetto al Sole, argomento
della latitudine lunare e anomalia media lunare; l’ultimo valore di λ rappresenta la
longitudine media delle Luna rispetto all’equinozio della data specifica.
Ogni termine scritto nella forma (1.9) va sommato con gli altri termini dello
stesso ordine α; le soluzioni finali per le coordinate rettangolari sono quindi delle
19
20
1. Elementi di meccanica celeste
doppie sommatorie
X
Y
(1.10)
Z
di questo tipo:
=
=
=
5
X
xα =
5
X
Tα
k
X
α=0
α=0
j=1
5
X
5
X
k
X
yα =
Tα
α=0
α=0
j=1
5
X
5
X
k
X
α=0
zα
=
α=0
Tα
!
Ax,α,j cos (Bx,α,j + Cx,α,j T ) ;
!
Ay,α,j cos (By,α,j + Cy,α,j T ) ;
!
Az,α,j cos (Bz,α,j + Cz,α,j T ) .
j=1
L’implementazione di una tale teoria per il calcolo delle posizioni dei corpi celesti
all’interno di un software si basa sul codice FORTRAN originale e sui file di dati della
pubblicazione VSOP87. Il primo passo nella determinazione delle posizioni apparenti
dei pianeti sta nel calcolo delle coordinate eliocentriche del pianeta e della Terra allo
stesso istante di tempo. In via pratica, redigere un simile codice di programmazione
manualmente richiederebbe uno sforzo quasi proibitivo, a causa dell’elevato numero
di termini matematici (dell’ordine delle migliaia) che rendono il compito soggetto ad
assai probabili errori di digitazione. Alcuni utili strumenti sono stati sviluppati per
automatizzare il processo di scrittura di codici sorgente per il calcolo di coordinate
dei pianeti, secondo la teoria VSOP87. Il Multi-Language VSOP87 Source Code
Generator Tool (cfr. [9]), ad esempio, consente di ottenere il codice desiderato
online, in pochi secondi, semplicemente selezionando il tipo di coordinate e l’oggetto
celeste di cui si vuole determinare la posizione in un qualunque momento nell’arco
di millenni.
Tabella 1.1: Soluzioni VSOP87 (cfr. [1]) in variabili ellittiche (a, λ, k, h, q, p),
rettangolari (X, Y , Z) e sferiche (L, B, r), calcolate nei sistemi di riferimento
J2000 (A, B, E) o attuale (C, D). L’origine del sistema è il Sole per tutte le versioni,
tranne in E, dove l’origine è nel baricentro del Sistema Solare. Nelle colonne sono
indicati gli oggetti per i quali vengono calcolate le posizioni in ciascuna versione:
gli otto pianeti da Mercurio a Nettuno (Me, V, E, M, J, S, U, N sono le iniziali
dei nomi in inglese), il baricentro Terra-Luna (EMB) e il Sole (Sun). La precisione
indicata nell’ultima riga è valida nell’arco degli anni 1900-2100.
Teorie analoghe al VSOP sono state formulate per quel che riguarda la Luna e,
ad esempio, i satelliti galileiani di Giove (Io, Europa, Ganimede e Callisto). Nel
1.4 Teorie planetarie: il modello VSOP
primo caso il modello di riferimento è la ELP2000 (cfr. [7]) che garantisce una
precisione di circa 0.0100 in un intervallo stimabile intorno al secolo prima e dopo
J2000; nel secondo caso la teoria in uso è la L2 dell’IMCCE, che fornisce dati validi
entro l’errore di 100 nei 1500 anni precedenti e successivi all’anno 2000.
Un buon apparato per la ricostruzione delle posizioni dei corpi celesti si affida
a modelli numerici o analitici come quelli analizzati in questo capitolo. Nel caso di
strumenti digitali, ci si affida a un software nel cui codice sorgente sono implementati
i risultati di queste teorie planetarie, sempre più aggiornate e accurate. La precisione
spaziale del modello VSOP per il periodo 1900-2100 è indicata in tabella (??), dove
le versioni A, B, C, D ed E differiscono per il tipo di coordinate, per il sistema di
riferimento e per l’origine.
21
Capitolo 2
L’apparato sperimentale: il
software
Il capitolo 1 ha fornito alcune basilari nozioni scientifiche sulla problematica riguardante la ricostruzione delle posizioni dei corpi celesti in cielo. Ma come si passa dai
laboriosi calcoli analitici che definiscono le orbite alla visualizzazione delle stesse?
E quali sono gli strumenti che vengono in aiuto quando si vuole identificare l’esatta
posizione di un oggetto?
Nel seguito di questo capitolo si farà una panoramica sugli strumenti oggi disponibili, ovvero programmi e applicazioni software in grado di calcolare le posizioni e
renderle visualizzabili su un qualunque schermo. Si spiegherà quali sono questi software, qual è il loro funzionamento e come le più moderne teorie planetarie vengono
implementate all’interno di questo genere di programmi.
2.1
Dall’antichità all’era moderna
Nel tentativo di ricostruire la posizione dei corpi celesti in cielo nella maniera più
accurata possibile, l’uomo si è sempre dotato di strumenti e apparati sperimentali,
dai più rudimentali globi celesti ai più complessi e tecnologici planetari moderni.
La tradizione attribuisce ad Anassimandro di Mileto la costruzione del primo
globo, mentre uno dei più antichi che ci sia pervenuto è l’Atlante Farnese databile al
II secolo d.C.: una statua di marmo che raffigura un gigante, Atlante, che regge sulle
spalle un globo celeste sul quale sono scolpite in bassorilievo alcune costellazioni, l’eclittica e l’equatore celeste. La Macchina di Anticitera, datata tra il I secolo a.C. e il
III d.C., è un vero e proprio calcolatore astronomico composto da quattro frammenti di rame, che mostrano le vestigia di quello che doveva essere stato un congegno
meccanico con complicati ingranaggi. L’astrolabio (dal greco astrolàbon, che prende di stelle) è considerato uno dei più antichi strumenti scientifici di misurazione al
mondo; fu usato da Tolomeo ed Ipparco, altro grande astronomo dell’antichità (circa
180-125 a.C.), per realizzare la maggior parte delle osservazioni per i loro cataloghi
di stelle. Uno strumento di derivazione dell’astrolabio è la sfera armillare, anche
questa opera degli astronomi greci, ma che divenne molto popolare dal XV secolo
in poi (vedi fig. 2.1). Era composta da una serie di cerchi graduati che rappresentavano i circoli immaginari: l’equatore, i tropici, i circoli polari artico ed antartico, i
23
24
2. L’apparato sperimentale: il software
Figura 2.1: Stampa della prima metà del ’700 raffigurante globo terrestre, globo
celeste e sfera armillare insieme. Cartografo: Johann Baptist Homann (1664 1724). Crediti: Antichità Storchi.
meridiani che passano per i punti dell’Ariete e della Libra per indicare gli equinozi,
e la fascia obliqua dell’eclittica divisa nei dodici segni dello zodiaco. Al centro degli
anelli vi era la sfera che rappresentava la Terra (nel sistema geocentrico) o il Sole (nel
sistema copernicano). Oltre all’astrolabio e alle sfere armillari, dal XIII secolo in
poi vennero costruiti degli orologi che includevano fondamentalmente il movimento
e la rappresentazione dei pianeti. Famoso è quello sul Municipio di Praga risalente
al 1410 dove una sfera astronomica indica l’inizio delle stagioni astronomiche e i
movimenti relativi del Sole e della Luna cosı̀ come le fasi lunari. In Italia il primo
orologio astronomico, che riproduceva i moti del Sole e della Luna, venne costruito
a Padova nel 1344 da Jacopo Dondi. All’inizio del XVIII secolo in Inghilterra venne
inventato il planetario da tavolo o “orrery”. Questa parola apparve per la prima
volta nel 1713 e deriva dal nome del collezionista di strumenti scientifici Charles
Boyle, quarto conte di Orrery1 . Costui aveva incoraggiato e favorito l’impresa di
realizzare questo genere di strumenti che riproducevano il moto del Sole, della Terra
e della Luna.
1
Titolo nobiliare irlandese.
2.2 Il planetario a proiezione
2.2
Il planetario a proiezione
Nel XX secolo si ha la grande innovazione del planetario a proiezione. Il primo
planetario fu commissionato nel 1913 dal Museo della Tecnica di Monaco alla ditta
Zeiss di Jena, specializzata in realizzazioni ottiche, meccaniche ed elettriche. Il
planetario fu completato a cavallo della prima guerra mondiale: consisteva in uno
strumento, di piccole dimensioni e facilmente controllabile, che proiettava la volta
celeste sulle pareti di una stanza buia. I progettisti della Zeiss riuscirono a trovare
un meccanismo, piuttosto semplice, di riprodurre per mezzo di ingranaggi il moto dei
pianeti. Venne utilizzato un unico motore, la velocità del quale veniva demoltiplicata
da ingranaggi costruiti in modo tale che i vari pianeti compiessero una rivoluzione
in tempi proporzionali ai loro reali periodi siderali di rivoluzione intorno al Sole. Le
difficoltà costruttive da superare non furono tuttavia banali: si resero conto che per
la proiezione era necessaria una batteria di proiettori, ciascuno dei quali riproduceva
una certa porzione di cielo, collocata al centro di una stanza emisferica. La base
del fondo cielo venne disegnata su dischi, sui quali vennero riportate le posizioni di
circa 4500 stelle.
Nell’agosto del 1923, sul tetto dello stabilimento della Zeiss di Jena, venne completata una cupola semisferica di 16 metri di diametro, dove venne installato il primo
proiettore Zeiss Modello I, il primo vero planetario moderno. Anche la cupola era
un oggetto estremamente innovativo: il suo scheletro esterno era, di fatto, la prima
struttura metallica leggera del mondo. Per la parte interna della cupola venne utilizzata una base di legno, sulla quale venne spruzzato un sottile strato di cemento
che, una volta solidificato e dipinto di bianco, costituı̀ una superficie altamente riflettente, buona per la proiezione. Quando la macchina venne accesa per la prima
volta il risultato fu talmente straordinario da lasciare a bocca aperta i suoi stessi
progettisti e costruttori, che furono anche i primi spettatori; la stampa locale si
riferı̀ al planetario come “la meraviglia di Jena”. Qualche mese dopo, il planetario
fu smontato e trasferito al Museo della Tecnica di Monaco, dove venne installato in
una cupola di 10 metri di diametro e dove, il 21 ottobre 1923, fu tenuta la prima
dimostrazione pubblica nel corso di un congresso. Successivamente lo strumento
tornò a Jena per qualche perfezionamento, venendo poi installato permanentemente
a Monaco nel 1925 dove operò fino all’inizio della seconda guerra mondiale, quando
fu smontato e messo al sicuro. Il museo venne infatti distrutto quasi totalmente dai
bombardamenti tra il 1944 e il 1945; una volta ricostruito, venne di nuovo installato
il planetario originale, che divenne operativo il 7 maggio del 1951. Sostituito alcuni
anni dopo da una macchina più moderna (un modello IV), fu portato al Max Planck
Institut e utilizzato per lo studio dell’orientamento degli uccelli con le stelle.
Il primo Planetario italiano fu inaugurato a Roma nel 1928, quando dopo la prima
guerra mondiale la Germania offrı̀ all’Italia, in conto riparazione dei danni di guerra,
un planetario Zeiss, un apparecchio di nuovissima concezione che aveva riscosso un
grande entusiasmo nel pubblico tedesco: fu il primo Planetario che si doveva aprire
al di fuori del mondo austro-tedesco. Nel 1980, la soprintendenza statale ritenne
opportuno restaurare la sala della Minerva destinandola a sala espositiva e cosı̀
dopo una storia travagliata il planetario fu smontato, messo in casse, consegnato
all’Università La Sapienza e depositato presso l’osservatorio di Monte Porzio. Nel
25
26
2. L’apparato sperimentale: il software
2000 l’Università La Sapienza, mediante un comodato d’uso, ha consegnato le casse
contenenti l’antico strumento al Comune di Roma, che lo ha fatto rimontare in
modo tale che la cittadinanza lo possa ammirare nell’ingresso del nuovo Planetario,
situato nel quartiere EUR2 . Il 10 luglio 1929 Ulrico Hoepli donò un planetario alla
città di Milano, che per molto tempo restò il più grande per dimensioni in Italia, oggi
superato dal Rainbow Magicland Planetarium di Valmontone, che ha una cupola di
23 metri di diametro.
Figura 2.2: Il vecchio proiettore ottico Zeiss II installato all’Hayden Planetrium di
New York nel 1935.
2
Il Planetario e Museo Astronomico è temporaneamente chiuso per lavori di riqualificazione
dell’edificio in adeguamento alle normative. In attesa della riapertura la programmazione prosegue
nel Planetario gonfiabile a Technotown, nel villino medievale di Villa Torlonia.
2.2 Il planetario a proiezione
2.2.1
I sistemi di proiezione opto-meccanici
Il sistema opto-meccanico di proiezione è rimasto l’unico fino alla fine degli anni
settanta. In genere i modelli di ultima generazione di questo tipo di planetario (oggi
molti utilizzano la fibra ottica) sono formati da una sfera cava, sulla cui superficie
si aprono i fori corrispondenti alle stelle visibili ad occhio nudo, di diametro diverso
in base alla grandezza della stella, e coperti da piccole lenti che ne amplificano la
differenza di dimensione sulla cupola di proiezione. Proiezione assicurata da una
lampadina interna di bassa potenza per creare un buon contrasto con la restante
parte di sfondo scuro della superficie della cupola: il realismo dell’esperienza di
visione in un planetario dipende proprio dal contrasto dinamico tra buio e luce.
La sfera è dotata in genere di tre movimenti: uno rotatorio est-ovest per simulare
la rotazione giornaliera della Terra, uno nord-sud per adeguare la latitudine alle
diverse posizioni sulla superficie terrestre ed uno di rotazione per riprodurre l’effetto
di precessione degli equinozi. Alcuni tipi di planetario sono costituiti da due sfere
distinte per la simulazione dei due emisferi celesti. Lo strumento è poi corredato
da un numero variabile di altri proiettori, per riprodurre i corpi del Sistema Solare
con i loro movimenti e per simulare funzioni quali la Via Lattea, i crepuscoli, le
coordinate astronomiche e cosı̀ via. Il sistema rappresenta comunque il cielo in due
dimensioni.
Un esempio di sistema opto-meccanico è il vecchio strumento di proiezione Zeiss
II, come quello installato nel vecchio Planetario di Roma (cfr. [10]) o nell’Hayden
Planetarium del Museo di Storia Naturale di New York City (1935). È un imponente
proiettore ottico di altezza pari a 2 metri e larghezza di circa 1,2 metri (figura 2.2).
È composto da due sfere unite da una intelaiatura di forma cilindrica. Le sfere sono
traforate e dispongono di circa 5000 fori stetoscopici, che rappresentano altrettante
stelle, incluse la Via Lattea e alcune nebulose, mentre circa 150 stelle più brillanti
usufruiscono di lenti singole. Tra i due predetti emisferi di proiezione, vari proiettori
rappresentano l’equatore, l’eclittica e le dodici costellazioni zodiacali. L’insieme dei
due emisferi è mosso da un sistema a tre assi, che consente di creare, tra l’altro, un
movimento di rotazione attorno ad un asse calcolato convenzionale, per la simulazione dei moti di precessione terrestre oppure la visuale da un determinato satellite
o da un altro pianeta. Attorno agli emisferi, si trova una struttura a forma d’arco
di cerchio, sulla quale sono disposti otto sistemi di proiettori individuali per il Sole,
la Luna e sei pianeti. Ogni singolo proiettore è munito di due sistemi ottici, che
consentono di mostrare sia un punto luminoso, il pianeta visto ad occhio nudo, sia
un’immagine ingrandita come se fosse osservata con un telescopio. L’ottavo proiettore dispone di un’immagine della Terra e di un piccolo segnalatore, destinato
a mostrare più precisamente questa o quell’entità celeste o anche a realizzare tracciati come cerchi, ellissi, anelli, moti retrogradi dei pianeti, linee di contorno delle
costellazioni e cosı̀ via.
Il più moderno proiettore ottico SN 88 montato al nuovo Planetario di Roma, realizzato dalla ditta francese R.S. Automation Industrie, è uno strumento
completamente automatizzato ed è costituito da vari elementi:
• il planetario vero e proprio, costituito da due semisfere che proiettano circa
4500 stelle, per la proiezione della linea dell’equatore, dell’eclittica e dello
27
28
2. L’apparato sperimentale: il software
zodiaco;
• 5 proiettori per i pianeti;
• 12 proiettori per diapositive che proiettano le immagini delle costellazioni a
tutta cupola;
• l’impianto audio stereo, costituito da sei canali;
• la possibilità di animare immagini astronomiche in 3D.
Figura 2.3: Zeiss UNIVERSARIUM modello IX. Proiettore opto-meccanico formato
da uno strumento ottico sferico e una serie di proiettori ausialiari.
La soluzione oggi più all’avanguardia è rappresentata dalle cosiddette “starball”,
planetari ottici in cui l’asse centrale è stato eliminato e le due semisfere avvicinate
a formare una forma “a uovo”. Ne è un esempio il modello UNIVERSARIUM IX
sempre della ditta Zeiss, installato ad esempio nel Planetario della città di Amburgo
o nel nuovo Hayden Planetarium del Rose Center for Earth and Space di New York.
UNIVERSARIUM è il modello più potente e tecnologico prodotto da Zeiss, progettato per proiettare su cupole di grandi dimensioni, orizzontali o inclinate (vedi
fig. 2.3). Basato sul concetto starball, prevede che la proiezione del cielo stellato
2.2 Il planetario a proiezione
e degli oggetti dinamici avvenga in maniera separata dal punto di vista meccanico.
Tutti i componenti, ovvero la sfera centrale, i proiettori per i pianeti e quelli per la
Luna e il Sole, vengono controllati via software da un’unità centrale, e pilotati contemporaneamente a seconda della funzione astronomica da rappresentare. Le stelle
riprodotte da questo sistema sono di qualità ottica migliore rispetto a qualsiasi tipo
di soluzione digitale, persino le più luminose. Il cielo stellato viene infatti riprodotto
utilizzando sistemi di proiezione a fibra ottica progettati e realizzati direttamente
dalla stessa ditta Zeiss. Le stelle appaiono in tutte le condizioni brillanti, puntiformi e totalmente bianche; quelle più luminose, con colori visibili in cielo, vengono
proiettate con tinte di colore rosso, blu o giallo. Anche lo scintillio delle stelle viene
simulato in maniera fedele, a completare una proiezione del firmamento paragonabile
solo al cielo notturno reale.
Figura 2.4: Evans & Sutherland Digistar 4.
2.2.2
I sistemi di proiezione digitali
A partire dagli anni ottanta si sono cominciati a sviluppare sistemi di proiezione
digitale. Il primo vantaggio di questa tecnologia è l’estrema versatilità: i sistemi opto-meccanici sono infatti limitati da evidenti costrizioni strutturali, mentre il
digitale garantisce pressoché infinite possibilità. Un altro importante vantaggio è
l’introduzione nei planetari della terza dimensione: è possibile simulare un viaggio
tra le stelle della nostra Galassia, spostarsi tra le diverse galassie e persino andare a
29
30
2. L’apparato sperimentale: il software
vedere la struttura dell’universo a grande scala. Il planetario digitale è un sistema
di proiezione full-dome (copre cioè l’intera cupola semisferica della sala del planetario), aperto ad altri contenuti multimediali: immagini, animazioni, interi film. Già
negli anni ottanta la ditta americana Evans & Sutherland (che si occupa di sistemi
di simulazione per aerei e navi) aveva proposto l’antesignano dei planetari digitali,
chiamato Digistar. Si trattava di un proiettore singolo con un obiettivo fish-eye
collocato al centro della sala circolare del planetario, in grado di riprodurre il cielo
in tre dimensioni, anche se monorcomatico e a bassa risoluzione.
Figura 2.5: Sistema ibrido Zeiss con proiettore opto-meccanico SKYMASTER e
proiettore digitale VELVET.
Oggi Evans & Sutherland, cosı̀ come numerose altre aziende del settore, sviluppano modelli di proiettori digitali con tecnologie assai più avanzate. Il Digistar 4
(fig. 2.4) è un sistema di grafica full-dome composto da un videoproiettore laser con
lente fisheye. Come sorgenti di luce utilizza tre laser, uno rosso, uno verde e uno
blu, che vengono poi ricombinati in un fascio singolo. Un dispositivo di rifrazione
della luce, “grating light valve” (o tecnologia GLV), controlla l’intensità luminosa
mediante un reticolo di minuscoli nastri semovibili montati su una base di silicio; la
2.3 Software planetari
valvola usa sei nastri per la diffrazione di ciascun pixel. L’allineamento del reticolo
viene alterato da segnali elettrici e questo spostamento regola l’intensità della luce
diffratta in maniera molto graduale. La luce colpisce lo schermo con una frequenza
di refresh di 60 Hz e produce immagini fino a 4000x4000 di risoluzione.
Anche la Zeiss produce sistemi digitali tra i migliori al mondo: il modello VELVET, a tecnologia DLP (Digital Light Processing), è stato ideato per favorire i
sistemi multicanale, che sfruttano cioè le potenzialità di più proiettori insieme. Prevede infatti la possibilità di installazione decentrata, ovvero con i proiettori, da tre
in su, collocati sul bordo della cupola, cioè sull’orizzonte dell’osservatore. Un sistema di computer suddivide l’immagine da proiettare nei diversi proiettori; i diversi
“pezzi” si combinano quindi a formare l’immagine finale, intera. Un’altra possibilità è rappresentata dalle configurazioni ibride: un proiettore opto-meccanico che
simula il cielo stellato posizionato al centro e una serie di proiettori digitali situati
lungo la circonferenza perimetrale della cupola. In figura 2.5 il sistema ibrido Zeiss,
che utilizza il proiettore ottico SKYMASTER affiancato da un proiettore digitale
VELVET.
Il Birla Planetarium di Kolkata (India), con cupola da 23 metri, sarà nell’arco
del 2015 rimodernato, con l’installazione del sistema ibrido Zeiss con proiettore
opto-meccanico STARMASTER e un sistema digitale composto da nove proiettori
VELVET. Il vantaggio di questa tipologia di sistemi sta nel non accettare alcun
compromesso: si può godere della flessibilità e versatilità del digitale senza però
dover rinunciare alla definizione e brillantezza del cielo stellato offerto dal proiettore
ottico.
L’avvento dei sistemi di proiezione digitale ha dunque notevolmente ampliato la
gamma delle configurazioni possibili di un planetario: si può optare per una soluzione ibrida, oppure un sistema a proiettori multipli fissi, o ancora un planetario
portatile con una cupola gonfiabile. Ad ogni modo, ognuna di queste soluzioni prevede l’utilizzo di un software dedicato alla simulazione celeste, in grado di proiettare
su tutta la cupola qualsiasi tipo di immagine o video generata da un computer.
2.3
Software planetari
L’avvento del digitale ha contribuito a una diffusione massiccia e trasversale dell’utilizzo di software planetari, in forme e circostanze anche molto diverse tra loro.
Semplici applicazioni per dispositivi portatili e telefoni cellulari, in grado di riprodurre il cielo diurno e notturno, consentono a chiunque, in qualunque momento,
di orientarsi nella volta celeste e avere sempre gli oggetti astronomici a portata di
“click”... o di “touch”. Programmi per computer consentono la semplice visualizzazione da casa di costellazioni e pianeti, utile ad esempio per programmare una
serata d’osservazioni al telescopio o, perché no, una romantica notte all’addiaccio
sotto una pioggia di stelle cadenti. Alcuni software sono progettati per controllare e
interfacciarsi con telescopi, consentendo di gestire, immagazzinare e avere sempre a
disposizione tutta una serie di dati relativi alle osservazioni (magnitudini, distanze,
posizioni, velocità e cosı̀ via). Ma soprattutto disporre di questo genere di supporto
vuol dire ampliare notevolmente la gamma di metodologie di didattica della scienza
31
32
2. L’apparato sperimentale: il software
e dell’astronomia, proponendo un approccio partecipativo dello studente, che tende
a coinvolgerlo e immergerlo dal punto di vista percettivo. È questa la finalità di
un progetto di spettacolo per planetario itinerante, nel quale viene realizzata con
l’ausilio del software una presentazione animata, interlacciata a contributi audio e
video preparati ad hoc.
Un software planetario è costruito sulla base scientifica delle teorie planetarie
come quelle descritte nel capitolo precedente. Le pubblicazioni dei modelli, analitici
o numerici, sono sempre corredate di librerie contenenti dati e subroutine di calcolo
accessibili a tutti online. Tali subroutine possono essere incorporate nei codici sorgente dei programmi planetari per calcolare le effemeridi dei corpi celesti. L’IMCCE
dell’Osservatorio di Parigi, ad esempio, pubblica all’indirizzo ftp://ftp.imcce.fr/
una serie di informazioni e dati ottenuti dai risultati di meccanica celeste e astrometria riguardanti i corpi celesti del Sistema Solare. Da una cartella specifica sono
scaricabili effemeridi ed elementi orbitali di asteroidi, comete, pianeti e satelliti,
ma soprattutto le subroutine, scritte in linguaggio Fortran 77, per il calcolo delle
posizioni dei vari corpi celesti.
Nello sviluppo di un software planetario si può accedere a queste subroutine,
eventualmente tradurle in altro linguaggio di programmazione (solitamente C++)
e inserirle nel file sorgente; vengono infine richiamate ogni volta che il programma
ha necessità di calcolare la posizione di quegli oggetti. Dopo aver determinato le
posizioni, entro la precisione garantita dal modello planetario, il software può accedere alla scheda grafica e visualizzare su schermo le immagini dei pianeti nelle loro
posizioni appena calcolate. Il processo completo del funzionamento del software è
riassunto nello schema a blocchi in figura 2.6.
librerie
FORTRAN
codici C++
routine
di calcolo
coordinate
rettangolari
scheda grafica
visualizzazione
posizioni
Figura 2.6: Schema a blocchi del funzionamento del software.
In appendice C è riportata la subroutine, fornita dall’IMCCE, che calcola le
posizioni dei corpi celesti sottoforma di funzioni in serie dipendenti dal tempo; suc-
2.3 Software planetari
cessivamente viene presentato un esempio di programma che utilizza la subroutine
per calcolare le effemeridi di un pianeta.
2.3.1
Stellarium e la nuova generazione software
Stellarium è un software planetario libero, scaricabile gratuitamente dal sito internet http://www.stellarium.org, realizzato secondo i termini della GNU General
Public License; disponibile per Linux, Windows e Mac OS X, sfrutta la Open Graphics Library per la computer grafica. È stato di fatto il programma che ha lanciato
la nuova generazione di simulatori del cielo, che si basano proprio su una grafica
realistica e sulla multimedialità.
Ma Stellarium contiene una vasta gamma di caratteristiche che sin dal 2001, anno del lancio da parte del francese Fabien Chéreau, lo rendono uno dei software più
apprezzati e utilizzati nell’ambito della didattica astronomica. Tuttavia l’impossibilità di stampare carte celesti e la mancanza di un sistema di ricerca automatica
di vari fenomeni astronomici ne impediscono l’uso per scopi di ricerca. La versione
fulldome, open source, del programma, Stellarium360, viene da alcuni anni sviluppata indipendentemente dalla versione desktop, ma ha il limite di operare a pieno
potenziale nel solo ambiente linux.
Figura 2.7: Schermata di Stellarium.
All’avvio del programma si può impostare la configurazione predefinita, definendo la località, il fuso orario, il paesaggio dello sfondo e tutte le funzioni da attivare in
automatico all’avvio (atmosfera, terreno, punti cardinali, griglie e cosı̀ via). Ognuna
33
34
2. L’apparato sperimentale: il software
di queste è comunque modificabile in seconda battuta attraverso il menu a schermo
o le scorciatoie da tastiera.
Tra le caratteristiche più importanti vi sono la possibilità di visualizzare centinaia
di migliaia di stelle, la Via Lattea, i pianeti e i loro satelliti naturali; illustrazioni
delle costellazioni principali, immagini delle nebulose e altri oggetti di cielo profondo;
la possibilità di attivare e disattivare l’atmosfera e osservarne cosı̀ gli effetti su cosa
e come vediamo di giorno e di notte. L’interfaccia grafica è semplice e accessibile a
tutti, anche ai bambini, e consente lo zoom sugli oggetti cosı̀ come gli spostamenti
di luogo e di data. Si rende personalizzabile attraverso la possibilità di incrementare
il numero di oggetti astronomici visualizzabili (ad esempio scaricando opportuni
database di stelle, esopianeti e oggetti di cielo profondo), di inserire immagini o di
creare degli script, ovvero serie di comandi che eseguono operazioni in automatico,
senza bisogno di input da tastiera.
La struttura del programma è organizzata in cartelle contenenti dati, immagini,
utility e i file sorgente.
data/ e doc/ contengono vari file di dati, tra cui caratteri di testo, dati sugli oggetti
del Sistema Solare, posizioni delle città e altro;
landscapes/ contiene dati e immagini per i vari paesaggi di sfondo. Ogni paesaggio
diverso ha la sua sottocartella. Questa viene chiamata secondo il landscape
ID, usato per specificare qual è lo sfondo predefinito nel file di configurazione
principale;
nebulae/ contiene dati e immagini delle nebulose;
scripts/ contiene gli script predefiniti e tutti quelli che l’utente vorrà aggiungere
in seguito;
skycultures/ contiene costellazioni con relative immagini stilizzate e nomi di stelle
comuni secondo le differenti culture. Ogni cultura ha la sua corrispettiva
sottocartella;
src/ contiene tutti i file sorgente del programma, inclusi quelli per il calcolo delle
effemeridi;
stars/ contiene i cataloghi stellari, Hipparcos e Tycho;
textures/ contiene altri file di immagine, tra cui la grafica dei pulsanti della barra
degli strumenti, mappe planetarie, illustrazioni di fenomeni atmosferici e altro.
Varie implementazioni di teorie IMCCE, tutte inserite nella sottocartella dei file
sorgente planetsephems/, calcolano i moti planetari e lunari, le orbite dei satelliti
principali di Marte, Giove, Saturno e Urano, e le posizioni del pianeta nano Plutone.
Una specifica subroutine converte le coordinate calcolate secondo le soluzioni dei vari
modelli in coordinate rettangolari, in modo da poter essere visualizzate su un display.
Sono molti altri i software planetari esistenti, anche con caratteristiche e utilizzi
diversi fra loro. Alcuni dei più noti sono riportati nella lista seguente:
2.3 Software planetari
Celestia Simulatore spaziale 3D in tempo reale che permette all’utente di viaggiare
tra stelle e pianeti verificandone la reale posizione rispetto al periodo temporale
indicato. Il programma è disponibile per sistemi operativi Microsoft Windows, Linux e Mac OS X e, essendo un software libero, può essere scaricato e
utilizzato gratuitamente. Utilizza la OpenGL (Open Graphics Library) per
generare una spettacolare e avanzata computer grafica. È stato sviluppato
dallo statunitense Chris Laurel nel 2001.
(http://www.shatters.net/celestia/)
Figura 2.8: Schermata di Celestia.
Nightshade Software per la simulazione e visualizzazione del cielo, per l’insegnamento e le esplorazioni astronomiche. La versione stabile del programma,
Nightshade Legacy, è stata sviluppata originariamente dallo stesso team di
Stellarium, ma pensata e progettata per l’utilizzo in un planetario. Oggi il
progetto Nightshade Legacy non viene più portato avanti, lasciando spazio al
nuovo Nightshade New Generation: una versione completamente rinnovata,
sviluppata da zero, con tecnologie avanzate adattate sui più moderni planetari
digitali. Allo stato attuale sono state distribuite solo alcune versioni cosiddette
pre-beta, ovvero delle anteprime contenenti ancora numerosi bug e imprecisioni, il cui scopo è quello di dare un’idea delle potenzialità della distribuzione
finale stabile. Nei prossimi anni Stellarium360 e Nightshade NG si giocheranno la corsa al trono come miglior programma planetario in circolo, nonostante
35
36
2. L’apparato sperimentale: il software
alcuni dubbi sulla licenza di utilizzo del secondo, che passerà da General Public
License a Nightshade Public License.
(http://www.nightshadesoftware.org)
Figura 2.9: Schermata di Nightshade.
WorldWide Telescope Sviluppato da Microsoft Research a partire dal 2008, questo programma si basa principalmente sull’elevata risoluzione grafica. Il cielo
astronomico è visualizzato in dettaglio grazie all’utilizzo di mappe, immagini e
rendering 3D disponibili direttamente negli archivi di alcune tra le più importanti missioni spaziali, quali ad esempio l’Hubble Space Telescope. Tuttavia, è
proprio il massiccio sfruttamento della scheda grafica, insieme alla necessità di
un collegamento internet, a rendere questo software lento e poco agile, se non
supportato da un pc ad elevate prestazioni. Operativo su sistemi Microsoft
Windows e Mac OS X.
(http://www.worldwidetelescope.org)
Google Sky Creata nel 2007 dal colosso Google, l’applicazione permette di esplorare lo spazio attraverso immagini di satelliti NASA, della Sloan Digital Sky
2.3 Software planetari
Figura 2.10: Schermata di World Wide Telescope.
Survey e del telesopio Hubble. Ha avuto larga diffusione soprattutto nella versione per smartphone tra gli utenti Android.
(https://www.google.com/sky)
Space Engine Simulatore spaziale e videogioco sviluppato dall’astronomo e programmatore russo Vladimir Romanyuk nel 2014. Attualmente è in circolo la
versione beta, completa ma ancora da mettere a punto. Disponibile freeware
per soli utenti Windows.
(http://en.spaceengine.org/)
Cartes du Ciel Software planetario open source sviluppato per tutti i sistemi operativi con licenza GPL, allo scopo di creare mappe del cielo in preparazione
all’osservazione.
(http://www.ap-i.net/skychart/it/start)
KStars Programma di simulazione astronomica incluso nel pacchetto “kdeedu”
(programmi di edutainment) di KDE. È un software libero distribuito con
licenza GPL per tutti i sistemi operativi. Adatto ad utenti di ogni livello,
contiene informazioni per gli amatori, articoli sull’astronomia, informazioni
generali al controllo di telescopi e fotocamere CCD ed elaborati calcoli astronomici.
(https://edu.kde.org/kstars/)
37
38
2. L’apparato sperimentale: il software
RedShift Gruppo di pacchetti software per l’astronomia distribuito da United Soft
Media, disponibile a pagamento per Microsoft Windows, Mac OS X e iOS.
Particolarmente adatto per l’osservazione e il controllo di telescopi mediante
iPhone o iPad.
(http://www.redshift-live.com/)
Starry Night Programma commerciale a pagamento distribuito da Simulation Curriculum Corp. per Windows e Mac OS X, diffusosi per l’elevato realismo fotografico e la molteplicità di scopi, ludici, didattici e scientifici.
(http://astronomy.starrynight.com/)
TheSky Applicazione astronomica progettata per scopi didattici e osservativi. Disponibile a pagamento per Windows e Mac OS X, nonché su App Store per
iOS.
(http://www.bisque.com)
SkyExplorer Software sviluppato da RSA Cosmos per tutti i sistemi di proiezione
progettati e sviluppati dall’azienda stessa. Non disponibile separatamente dai
planetari.
(http://www.rsacosmos.com/en/products/software/skyexplorer-v3.html)
Per un elenco completo di software freeware, shareware e commerciali si rimanda
a ref. [11].
2.4
Nightshade
Preventivamente alla scelta del software adatto agli scopi di questo lavoro, alcuni
dei programmi sopra elencati sono stati esaminati e collaudati. Tra i criteri presi
in considerazione per l’analisi comparativa vi sono sicuramente la disponibilità gratuita e immediata, la compatibilità con il sistema operativo in uso, la semplicità in
termini di interfaccia grafica e di comandi, la possibilità di personalizzare il software
e implementare dei piccoli programmi precompilati mediante script. Nightshade Legacy (da qui in avanti abbreviato in NL) è risultato essere il programma planetario
che meglio sintetizza tutte queste caratteristiche a questo stadio dei lavori.
Sviluppato in origine come distribuzione ad uso planetario del ben più noto Stellarium, di cui mantiene tutte le caratteristiche e funzionalità, viene da anni utilizzato
per l’esplorazione e l’insegnamento dell’Astronomia in molti planetari presenti nelle
scuole e in altre strutture dedicate. L’attuale versione stabile (11.12.1) è tuttavia l’ultima ad essere sviluppata perché il team della Digitalis Education Solutions Inc., oggi
a capo del programma, ha ritenuto opportuno riscrivere da zero il codice e iniziare
un progetto del tutto nuovo, sotto il nome di Nightshade New Generation. NL viene
distribuito sotto licenza libera e open source GNU General Public License v3, per
operare su piattaforme Linux, Windows (XP o successive) e Mac OS X (su tecnologia
Intel). I requisiti minimi di sistema sono basilari e lo rendono fruibile ormai da qualunque PC: 1 gigabyte di memoria, processore Intel Pentium 4 o equivalente, scheda
video NVidia, ATI o Intel con driver aggiornati. È presente una community estesa di
2.4 Nightshade
utilizzatori in grado di fornire supporto immediato e costante, reperibile all’indirizzo
internet: http://nightshadesoftware.org/projects/nightshade/boards.
2.4.1
Struttura del programma
Essendone diretto discendente, la struttura del programma è molto simile a quella
di Stellarium, sebbene alcuni file e sottocartelle siano riarrangiati in maniera leggermente differenti: tutte le immagini utilizzate dal programma, ad esempio, sono
incluse nella cartella textures/, comprese quelle dei corpi celesti, delle nebulose e
dei paesaggi di sfondo. L’interfaccia grafica e i menu sono gli stessi di Stellarium,
cosı̀ come le immagini sono raccolte dalle medesime banche dati.
Se un file esiste sia nella cartella di installazione sia nella cartella utente, il
programma va ad usare la versione presente in quest’ultima. In questo modo è
possibile scavalcare impostazioni che fanno parte dell’installazione principale di NL,
semplicemente copiando i file in questione nell’area utente e modificandoli da lı̀. È
altresı̀ possibile aggiungere sfondi e altre immagini creando i relativi file nelle cartelle
utente, lasciando inalterate le cartelle di installazione. In questo modo diversi profili
su un sistema a cui possono accedere più utenti possono personalizzare la propria
versione del programma senza andare a toccare quelle degli altri.
Dal momento che il software è progettato per lavorare sotto la cupola di un
Planetario, la schermata del cielo non è rettangolare, bensı̀ circolare; varie subroutine che si trovano tra i file sorgente nella cartella src/ effettuano la conversione
automatica delle coordinate, per la proiezione stereografica.
2.4.2
Caratteristiche e funzionalità
Nel seguente schema sono riassunte le principali caratteristiche del programma e i
suoi punti di forza.
A. Caratteristiche del cielo
- oltre 600.000 stelle dal catalogo Hipparcos e dal catalogo Tycho-2;
- cataloghi supplementari con oltre 210 millioni di stelle;
- asterismi e illustrazioni delle costellazioni;
- costellazioni per oltre venti culture differenti;
- immagini degli oggetti del cielo profondo (cataloghi Messier, NGC, IC);
- Via Lattea realistica;
- atmosfera altrettanto realistica con alba e tramonto;
- pianeti del Sistema Solare e rispettivi satelliti maggiori.
B. Interfaccia
- potente zoom;
39
40
2. L’apparato sperimentale: il software
- controllo della data e dell’ora;
- interfaccia multilingua;
- proiezione fisheye (a occhio di pesce) per le cupole dei planetari;
- adattamento dinamico dell’occhio e messa in risalto dei corpi più luminosi;
- simulazione di inquinamento luminoso;
- interfaccia grafica e controllo esteso da tastiera;
- numerosi plug-in che permettono, ad esempio, di visualizzare una porzione di
cielo come vista da un oculare di un telescopio o di aggiungere asteroidi.
Figura 2.11: Schermata di NL: per attivare la rappresentazione artistica delle
costellazioni è necessario premere il tasto ‘R’.
C. Visualizzazione
- griglie di coordinate equatoriali e altazimutali;
- scintillio delle stelle;
- stelle cadenti;
- simulazione delle eclissi;
- simulazione di supernove;
- sfondi personalizzabili.
2.4 Nightshade
D. Personalizzazione
- sistema di plugin per aggiungere satelliti artificiali, per simulare oculari, per
configurare telescopi e molto altro;
- possibilità di aggiungere le proprie immagini, oggetti del cielo profondo, panorami, costellazioni;
- possibilità di aggiungere e simulare script, comandi utili, ad esempio, per delle
lezioni;
- possibilità di aggiungere nuove culture di visualizzazione del cielo;
- possibilità di vedere il cielo da 36 corpi celesti tra pianeti e loro satelliti
maggiori, asteroidi, pianeti nani e anche dal Sole.
Figura 2.12: Schermata di NL: sono attivati il meridiano (linea blu), la linea
dell’eclittica (in rosso) e l’equatore celeste (verde).
Una serie di semplici comandi che agiscono sullo scorrere del tempo consente
di spiegare eventi di rilevanza astronomica quali ad esempio il meccanismo dell’analemma, il movimento retrogrado dei pianeti, la precessione degli equinozi e le
congiunzioni planetarie. Attraverso una elementare istruzione, quale la modifica
della latitudine del luogo di osservazione, è possibile mostrare come cambia il cielo
notturno e quali costellazioni sono visibili o meno nei due diversi emisferi; inoltre
si possono approfondire concetti di base legati alla nostra stella e al suo moto apparente in cielo: il tragitto differente compiuto dal Sole ai poli e all’equatore, e il
fenomeno del Sole di mezzanotte. Non solo si potranno inserire le coordinate di un
41
42
2. L’apparato sperimentale: il software
Figura 2.13: Schermata di NL: selezionando uno degli oggetti del catalogo Messier,
M104 in questo caso, si possono conoscere dati importanti quali la distanza, la
magintudine, la posizione e la dimensione angolare dell’oggetto; avvicinandosi con
lo zoom si visualizza l’immagine ingrandita proveniente dal database del Telescopio
Hubble.
punto qualsiasi sulla Terra, ma ci si potrà persino spostare su un altro pianeta del
Sistema Solare o su un satellite naturale come la Luna, per poter cosı̀ puntare lo
sguardo verso il nostro pianeta. È anche possibile volare sopra il Sistema Solare e
guardare verso il basso per avere una visione d’insieme delle orbite di tutti i pianeti.
NL consente anche di capire come si generano le fasi lunari e osservare il fenomeno
della librazione, particolarissima danza che la Luna effettua nello spazio intorno a
noi.
L’ampio catalogo presente nel programma consente di visualizzare stelle fino alla
decima magnitudine che, una volta selezionate dall’utente, appariranno sullo schermo mentre si viaggia sempre più in profondità nel cosmo; impostando la magnitudine
limite si va a definire il numero di stelle visibili. Una volta selezionata una stella,
viene mostrata una scheda che riporta, oltre al nome dell’oggetto, una serie di dati
informativi quali il numero di catalogo, la magnitudine e la distanza in anni luce.
Gli effetti dell’atmosfera terrestre sono visibili selezionando e deselezionando l’icona dell’atmosfera; cosı̀ facendo si potranno ad esempio vedere le stelle anche di
giorno e notare in quale costellazione si trova il Sole in un particolare periodo dell’anno. Si può per di più agire sul tremolio delle stelle dovuto proprio alla turbolenza
dell’aria, aumentandolo o diminuendolo a piacere. L’attenzione ai dettagli che può
vantare il software è apprezzabile anche nell’opzione inquinamento luminoso che
genera il cielo stellato cosı̀ come visto nelle grandi e luminosissime metropoli.
Nel database illustrativo di NL sono presenti alcune centinaia di immagini a colori
2.4 Nightshade
di oggetti appartenenti al catalogo Messier, cosı̀ come molti altri dei cataloghi NGC,
IC, Hubble e cosı̀ via. Tutti questi oggetti, una volta selezionati, possono essere
analizzati in dettaglio mediante la funzione zoom: la posizione in cui appaiono
gli oggetti è orientata esattamente come osservati attraverso i telescopi e con le
reali dimensioni (vedi fig. 2.13); è anche possibile espandere il catalogo inserendo
immagini dal proprio archivio personale. Ingrandendo la zona di cielo interessata si
può andare a esplorare la Via Lattea, simulando anche le variazioni in intensità a
seconda del luogo in cui ci si pone, se in città o sotto cieli più limpidi. Nelle regioni
più meridionali della Via Lattea sono inoltre apprezzabili le due nubi di Magellano.
Per quanto riguarda i pianeti e i satelliti, oltre a poterli visualizzare in dettaglio
con lo zoom, è possibile seguire il loro moto nel cielo al variare delle ore e, ad esempio
visualizzando le loro orbite su un periodo di alcuni mesi, studiare le differenze tra i
moti stazionari, retrogradi e diretti.
Figura 2.14: Schermata di NL: menu di configurazione a interfaccia grafica. Consente
di impostare la lingua, la data, il fuso orario, la posizione geografica, il paesaggio
di sfondo predefinito e altre funzioni.
Per orientarsi in cielo vengono in aiuto i cerchi e le griglie (fig. 2.12): l’equatore
celeste, segnato con le 24 ore, il meridiano dell’osservatore, da 0 a 90 gradi, l’eclittica
e le due griglie di coordinate altazimutali ed equatoriali. Con questi strumenti si
può rendere più semplice la comprensione di alcuni meccanismi complessi legati alle
coordinate astronomiche.
Tra i più comuni e popolari fenomeni astronomici rappresentati opportunamente
nel software si trovano anche le eclissi lunari e solari e gli sciami meteorici; di questi
ultimi si può scegliere l’intensità in termini di numero di meteore visibili all’ora.
Il programma è configurabile mediante un’interfaccia grafica (GUI, Graphic User
Interface, fig. 2.14) o un’interfaccia testuale (TUI, Text-based User Interface, 2.15).
43
44
2. L’apparato sperimentale: il software
Alcune impostazioni sono accessibili da entrambi i menu, ma il secondo gestisce
più funzioni e permette di effettuare regolazioni più fini. Al menu grafico si accede
premendo il tasto ‘1’, mentre con ‘M’ si apre il menu testuale.
Figura 2.15: Schermata di NL: menu di configurazione a interfaccia di testo (compare
sul bordo in basso a destra). Permette le stesse impostazioni del menu grafico, con
qualche funzione in più; ad esempio il lancio degli script, come nel caso mostrato.
Allo stesso modo alcune delle funzioni precedentemente descritte nell’elenco sono
richiamabili per mezzo di tasti di comando che velocizzano la loro attivazione: ad
esempio per visualizzare o nascondere le linee delle costellazioni basta premere ‘C’
sull tastiera, mentre con ‘P’ si possono far comparire i nomi dei pianeti. L’intera
lista dei tasti di comando di NL è inclusa nell’appendice B.
Un punto di forza di NL è sicuramente rappresentato dalla possibilità di combinare in serie molte di queste istruzioni allo scopo di dar vita a lezioni animate
preconfigurate implementabili per mezzo di script, ovvero dei file contenenti una
lista di comandi che impongono al programma le azioni da compiere.
2.4.3
StratoScript
Gli script gestibili da NL sono dei file .sts che contengono una lista di comandi
StratoScript, un semplice linguaggio di programmazione dedicato sviluppato dalla
Digitalis Education Solutions. Chiunque possegga anche solo nozioni di base dell’astronomia sarà in grado di utilizzare questa tecnologia, in sostituzione di lunghe
e ripetitive sequenze manuali di istruzioni; è utile inoltre per aggiungere piccoli ma
efficaci effetti speciali alle proprie presentazioni, come manipolazioni di immagini,
audio e video. Con l’utilizzo degli script si può simulare qualunque fenomeno astro-
2.4 Nightshade
nomico previsto manualmente dal software e molto altro ancora; l’unico limite è
posto dalla fantasia dell’utente.
Esecuzione degli script
Per far partire uno script si apre il menu testuale con ‘M’ e con le frecce si scorre
fino alla voce “Scripts”, alla sezione 7. Saranno selezionabili tutti gli script presenti
nella cartella dedicata, ovvero gli script predefiniti che si trovano già all’interno
del programma al momento dell’installazione e gli script eventualmente aggiunti in
seconda battuta dall’utente. Nel caso in cui si utilizzino unità rimovibili come cd
o penne USB, gli script dovranno sempre essere allocati in una cartella scripts
nella cartella principale dell’unità. In un file chiamato startup.sts è possibile
scrivere una sequenza di comandi predefiniti da far girare in automatico all’avvio
del programma oppure si può caricare un paesaggio di sfondo personalizzato che si
vuole usare durante una presentazione.
Durante l’esecuzione di uno script si può mettere in pausa (utilizzando il tasto
‘6’), scorrere velocemente in avanti (con il tasto ‘L’) oppure riprendere l’esecuzione
(con ‘K’); non si può invece tornare indietro. Premendo il tasto ‘[’ e il tasto ‘]’
si regola il volume dell’audio, mentre il tasto ‘7’ annulla l’esecuzione dello script.
Durante l’esecuzione il programma non è in grado di ricevere altre istruzioni via
tastiera; questo per prevenire confusione da parte dello script mentre sta girando.
Principali funzioni degli script
Uno degli aspetti più importanti dell’utilizzo di script è la possibilità di posizionare
immagini in un punto esatto del cielo. Si può allora porre una serie di immagini
tutte sullo stesso piano, in modo da creare una mappa 2D, oppure creare una spazializzazione su diversi piani, a diverse profondità e in diversi sistemi di coordinate. Un
insieme di immagini in movimento, che appaiono e scompaiono in dissolvenza, ruotano e si ingrandiscono a piacimento può risultare di grande effetto sotto la cupola
di un planetario.
Uno script può chiamarne un altro al suo interno; ad esempio si può fare in
modo che uno script richiami sé stesso al termine dell’esecuzione, cosı̀ da ottenere
una presentazione che in maniera semplice e automatica si ripete all’infinito. Questo può risultare utile in caso di mostre o eventi che prevedano la riproduzione di
presentazioni automatiche senza la presenza di operatori.
Alcuni esempi di utilizzo degli script:
• caricare come sfondo all’avvio una città personalizzata;
• visualizzazione del cielo notturno stagionale che si riavvia in automatico;
• simulazione di un’aurora mediante immagini in movimento;
• spettacolo fulldome completo di musiche, narrazione e personaggi animati che
effettuano un tour del Sistema Solare;
• andare in visita sulla Luna e guardare verso la Terra;
45
46
2. L’apparato sperimentale: il software
• far trascorrere un anno un giorno siderale alla volta, con le orbite dei pianeti
a mostrare il moto retrogrado;
• caricare un centinaio di asteroidi luminosi e, dando una sguardo alle loro orbite,
viaggiare su una cometa oltre il Sole.
Creare uno script
La realizzazione di uno script è un processo iterativo, nel quale più di un tentativo di
scrittura viene effettuato e molte sono le modifiche da apportare prima di giungere
alla versione definitiva che gira esattamente nel modo desiderato. Per la scrittura
degli script si può far riferimento al manuale StratoScript Command Reference (ref.
[16]). Partendo da script semplici si crea un file .sts con un editor di testo e si fa
partire da NL sul desktop del computer.
I comandi Stratoscript supportati nella versione Nightshade 11.12.1 a cui si fa
riferimento in questo lavoro hanno il seguente formato:
• nome del comando seguito da una lista di argomenti opzionali che compaiono
in forma di coppie nome argomento/valore argomento;
• lo spazio bianco viene usato come delimitatore;
• valori di argomento che richiedono spazi vuoti possono essere scritti tra virgolette (“Questo è un valore con spazi”);
• comandi e nomi degli argomenti non sono sensibili alle maiuscole (case insensitive);
• argomenti possono essere disposti in qualunque ordine
Esempio:
COMANDO NOME ARGOMENTO1 VALORE ARGOMENTO1 NOME ARGOMENTO2 VALORE ARGOMENTO2 ...
Si riporta a titolo di esempio3 un piccolo script che contiene alcuni comandi base
come la selezione di un pianeta, la visualizzazione dell’atmosfera, cambiamenti di
data e posizione e caricamento di immagini esterne:
select planet Jupiter
flag atmosphere on
date utc 2015-05-20T12:00:00
wait duration 2
moveto lat 45.7 lon -122 duration 5
landscape action load type spherical texture egarden.png
select nebula ‘‘Southern Ring Nebul’’ pointer off
set home planet ‘‘Solar System Observer’’
Nel manuale in ref.[16] si trova l’intera lista di comandi validi, insieme ai nomi e ai
valori degli argomenti supportati. I valori scritti a lettere minuscole sono letterali,
mentre quelli a lettere maiuscole vanno sostituiti con il valore desiderato (ad es.
sostituire SECONDS con il numero di secondi effettivo che si vuole avere).
3
Un progetto di spettacolo più elaborato è presente in appendice D.
2.4 Nightshade
È possibile modificare lo script anche una volta lanciato, basta uscire dal programma, effettuare le modifiche desiderate, salvare il file, e poi in NL premere il tasto
‘shift’ seguito da ‘`’ (accento grave) e poi ‘K’ per riavviare lo script in esecuzione.
Gli script rappresentano un potente strumento per migliorare, ordinare e velocizzare il lavoro, dando anche più tempo all’operatore per commentare e interagire
in maniera partecipativa con il pubblico o gli studenti. Tuttavia, cosı̀ come molti
altri strumenti, può essere complesso da padroneggiare. Per questo conviene sempre
avere a portata di mano la guida di riferimento e le molte risorse disponibili nel web;
in ogni caso, per le questioni più delicate è possibile contattare gli sviluppatori del
software.
La possibilità di realizzare articolate presentazioni multimediali rientra nei pregi
della tecnologia digitale che mette a frutto tutte le potenzialità dei software planetari
descritte in questo capitolo. Programmi come Celestia, Stellarium o NL non solo
sono in grado di portare i visitatori a spasso nell’infinità del cosmo, ma possono
anche diventare efficaci strumenti didattici e scientifici. Simulazioni, osservazioni
del cielo e lezioni riguardanti i più disparati eventi astronomici sono rese possibili
mediante l’uso di script, che velocizzano, approfondiscono e letteralmente elevano a
una dimensione più alta la divulgazione dell’Astronomia.
47
Capitolo 3
L’apparato sperimentale:
l’hardware
Rispetto ai tradizionali sistemi di proiezione da planetario, un sistema digitale presenta una serie di vantaggi tra cui senz’altro la versatilità e l’estrema libertà nell’utilizzo di un software dedicato. Nel precedente capitolo si sono descritti i punti di
forza e le caratteristiche di un programma planetario come Nightshade, e i motivi
che ne hanno portato alla scelta nella gamma di tutte le opzioni possibili.
Va da sé che, per quel che riguarda un apparato per la ricostruzione e la proiezione
delle posizioni dei corpi celesti, disporre di un buon supporto software non è tutto:
anche l’hardware gioca un ruolo rilevante. Le parti che entrano in gioco sono infatti
diverse e il raggiungimento del miglior setup possibile è spesso una questione di
compromesso fra qualità, disponibilità e prezzo, sia del software sia dell’hardware.
Varie sono le componenti che concorrono nel loro complesso alla buona riuscita
della realizzazione hardware, che può essere ottenuta anche in maniera relativamente
semplice ed economica.
3.1
Le componenti hardware
Un apparato sperimentale come quello di un planetario dispone delle seguenti componenti essenziali:
1. un computer con software in grado di riprodurre il cielo in proiezione sferica;
2. una cupola semisferica su cui proiettare;
3. il sistema di proiezione composto da un videoproiettore ed elementi ottici.
A questi si può aggiungere un sistema audio stereo per ottenere una proiezione
immersiva più completa.
Come si vedrà in seguito ogni componente ha le sue caratteristiche e gli elementi
da tenere in considerazione sono tanti. Un buon risultato finale scaturisce da alcuni
requisiti minimi che devono essere soddisfatti da ciascuno dei componenti: disporre
del miglior software diventa inutile se il sistema di proiezione è di scarsa qualità, e
viceversa.
49
50
3. L’apparato sperimentale: l’hardware
Planetari
piccoli
medi
grandi
Diametro della cupola
3 - 12 m
12 - 18 m
> 18 m
Posti a sedere
ca. 1 - 100
ca. 100 - 200
ca. 200 - 500
Tabella 3.1: Dimensioni e capienza dei planetari. Fonte: Zeiss.
3.1.1
Computer
Per questo genere di attività l’elemento che incide di più sulle performance del
computer è la scheda video, non tanto per sostenere il software in sé quanto per
la riproduzione di file multimediali. In ogni caso deve essere supportata anche da
un processore e una memoria RAM all’altezza. Come punto di partenza si può far
riferimento alle seguenti linee guida:
• processore: Core2duo minimo;
• memoria RAM: DDR2 da 1GB minimo;
• disco rigido: 500GB raccomandati. Dischi SATA raccomandati per una maggiore fluidità in ambienti HD 1920x1080 con compressione H.264. Dischi a
stato solido SSD sono migliori per velocità e resistenza agli shock;
• sistema operativo: dipende dalla scelta del software. NL gira su tutte le piattaforme, consigliabile Linux perché al momento è l’unica che consente di far
partire i video direttamente all’interno degli script. Se possibile, meglio avere
una macchina dedicata all’uso esclusivo del planetario;
• scheda madre: microATX o Shuttle; computer “barebone”1 sono una buona
opzione data la loro facilità di trasporto;
• scheda video: NVIDIA GeForce 8200 o successive in formato PCI Express con
uscita DVI o HDMI.
In linea generale non è raccomandabile l’uso di computer portatili per via delle
schede video non sempre idonee. Tuttavia in alcuni casi possono rappresentare la
soluzione migliore perché a basso costo e facilmente trasportabili; qualora si facesse
questa scelta, è bene sempre assicurarsi che le caratteristiche di cui sopra siano
soddisfatte e ricordarsi inoltre di schermare, o spegnere del tutto, il monitor poiché
la luce emessa può risultare fastidiosa o interferire con il buio della cupola.
3.1.2
Cupola
Cupole per planetario vanno dai 3 ai 35 metri di diametro (tabella 3.1), dando la
possibilità di accomodare da una a cinquecento persone. Possono essere permanenti,
removibili oppure gonfiabili, a seconda del tipo di utilizzo.
1
Computer, spesso di dimensioni ridotte, composto da componenti fondamentali preassemblati.
3.1 Le componenti hardware
51
La cupola è forse l’elemento piú importante dal momento che costituisce lo schermo
su cui proiettare; inoltre alcune delle sue caratteristiche determinano la resa visiva
dell’immagine proiettata, principalmente legata alla riflettivitá e omogeneità della
superficie interna.
• Cupole gonfiabili portatili: possono essere gonfiate in pochi minuti. Principalmente utilizzate per planetari itineranti da portare nelle scuole o centri di
divulgazione scientifica;
• strutture temporanee che utilizzano segmenti di plastica rinforzata con
vetro (vetroresina) imbullonati tra di loro e montati su una cornice. Poiché
si possono impiegare alcune ore per assemblarle, sono piú adatte per mostre o
per stand nelle fiere dove la cupola resterá montata per almeno qualche giorno;
• cupole gonfiabili a pressione negativa, idonee in situazioni semi-permanenti.
Fanno uso di una ventola per estrarre aria da dentro la cupola e consentire alla
pressione atmosferica di spingere contro le pareti e dare la forma corretta;
• cupole permanenti di dimensioni piú ridotte sono generalmente costruite
in vetroresina. È questa una soluzione a basso costo, ma dal momento che la
superficie riflette il suono, oltre alla luce, l’acustica all’interno di questo tipo di
cupole risulta carente; altri problemi riscontrati sono legati al surriscaldamento
e alla ventilazione, poiché l’aria non passa attraverso la superficie rigida;
• cupole di planetari piú datati venivano realizzate con materiali tradizionali
da costruzione rivestiti di intonaco. Questo metodo è piuttosto dispendioso
e soffre gli stessi problemi di acustica e ventilazione del vetroresina;
• la maggior parte delle cupole moderne vengono costruite con settori di alluminio sottile con un telaio di supporto in tubolari sempre di alluminio.
L’uso di questo materiale consente di applicare una fitta rete di fori sulla superficie che riduce la riflessione sonora e favorisce la circolazione dell’aria. In
alternativa, l’interno della cupola puó essere verniciata di bianco con vernice
fonoassorbente.
Le cupole fisse rappresentano sicuramente una soluzione comoda, ma richiedono
un edificio dedicato allo scopo. Non è l’opzione più consigliabile nel caso di progetti
educativi rivolti soprattutto alle scuole, dal momento che negli istituti scolastici è
più semplice portare un planetario mobile.
Le cupole a settori montabili, definite anche cupole geodetiche, sono strutture
emisferiche composte da una rete di travi giacenti su cerchi massimi (geodetiche).
Le geodetiche si intersecano formando elementi triangolari che giacciono approssimativamente sulla superficie di una sfera. Sono spesso la soluzione piú economica,
ma essendo rigide e chiuse su tutti i lati bisogna prestare particolare attenzione alle
regole in merito all’ignifugazione. In generale, comunque, quando si ha a che fare
con il pubblico è sempre necessario assicurarsi sulla messa a norma delle cupole. Lo
svantaggio maggiore di questo genere di soluzioni resta tuttavia il tempo di montaggio e smontaggio, difficilmente compatibile con una situazione realmente mobile.
52
3. L’apparato sperimentale: l’hardware
Figura 3.1: Cupola gonfiabile Go-Dome con 4 anelli, 4 metri di diametro.
Per questi casi, la cupola gonfiabile è senza dubbio la scelta migliore, sebbene molto
piú costosa.
Nel caso di un planetario mobile e trasportabile, la cupola gonfiabile rappresenta
il miglior compromesso. Pronta all’uso in circa venti minuti, puó facilmente essere
allestita in un edificio scolastico, per esempio in una palestra, un atrio o una classe
con soffitto sufficientemente alto, e in qualunque altro spazio idoneo all’utilizzo del
planetario. Esistono molte case di produzione certificate; tra le migliori cupole
disponibili attraverso rivenditori autorizzati in Italia si trovano le Go-Dome e le
Digitalis.
L’esperienza visiva all’interno di una cupola è tanto realistica quanto piú ampio è
il range dinamico dell’immagine proiettata, cioè il contrasto tra luci e ombre. Questo
è un punto assai delicato nella resa di un sistema ottimale perché un’immagine
brillante proiettata su un lato della cupola tenderà a riflettere la luce sulla superficie
opposta. Si avrà di conseguenza un innalzamento del livello del nero (black level)
in quella zona e l’immmagine complessiva potrebbe risultare meno realistica. Fino
a qualche tempo fa le proiezioni nei planetari tradizionali riguardavano soltanto
piccoli punti luminosi (le stelle) su sfondo nero e la riflessione era trascurabile. Ma
da quando si sono iniziati a proiettare anche oggetti brillanti estesi (ad esempio
nebulose o galassie) che vanno a riempire aree più ampie della cupola, l’incidenza di
questa problematica sulla buona riuscita di una proiezione è diventata significativa.
La soluzione adottata nei moderni planetari consiste nel dipingere la superficie di
interna della cupola con un grigio chiaro piuttosto che di bianco, riducendo in questo
modo la riflessione della luce a circa il 40-50% e aumentando sensibilmente il range
dinamico dell’immagine.
3.1 Le componenti hardware
Figura 3.2: Disegno del planetario di Valladolid, con cupola inclinata.
Tradizionalmente, le cupole per planetari sono sempre state montate in maniera
orizzontale, nella direzione dell’orizzonte naturale del cielo. Questo induce però a
stare in una posizione sotto la cupola non troppo confortevole, con sedie o poltrone molto inclinate o addirittura sdraiati su cuscini. Per ovviare a ciò, un numero
sempre maggiore di planetari vengono oggi costruiti con cupole inclinate di un angolo di qualche decina di gradi rispetto all’orizzonte, dando cosı̀ più comfort allo
spettatore. Per le cupole inclinate si preferisce una disposizione unidirezionale delle
sedute le quali sono rivolte verso una direzione preferenziale di proiezione. Questa
configurazione si addice alla proiezione di film e documentari a tutta cupola, poiché
spesso in tali spettacoli, essendo stati originariamente realizzati per schermo piano,
il contenuto principale è concentrato in un settore specifico della cupola; le proiezioni
astronomiche, al contrario, possono risultare penalizzate perché una porzione di cielo
si troverà sempre alle spalle delle sedute. Questa disposizione, d’altro canto, sfrutta
meglio gli effetti sonori stereo e surround e consente di posizionare all’occorrenza
un podio di fronte alla platea. Le cupole standard orizzontali, invece, prediligono
la disposizione classica concentrica con le sedute rivolte verso il centro della sala.
Poiché priva di una direzione di proiezione preferenziale, questa configurazione è in
assoluto la migliore per presentazioni astronomiche e garantisce una visibilità ottimale degli oggetti a bassi angoli di elevazione da tutti i posti a sedere. A parità
di diametro, la disposizione standard fornisce un numero di posti maggiore rispetto
alla disposizione unidirezionale.
3.1.3
Sistemi di proiezione
Per la proiezione sferica su una cupola con un sistema digitale è necessario disporre di un videoproiettore e di un gruppo ottico in grado di deformare l’immagine e
53
54
3. L’apparato sperimentale: l’hardware
(a) Disposizione concentrica.
(b) Disposizione unidirezionale.
Figura 3.3: Cupole con disposizione concentrica delle sedute (a) e unidirezionale (b).
Crediti: Zeiss.
visualizzarla correttamente su una superficie curva. Questa operazione è in generale non banale e può essere effettuata mediante l’utilizzo di due componenti ottici
diversi: uno specchio curvo oppure una lente fisheye2 . I risultati che si ottengono
attraverso l’applicazione dell’uno o dell’altro metodo sono leggermente differenti e
la scelta del metodo più idoneo dipende da diversi fattori; merita quindi un’analisi
più approfondita che sarà affrontata in dettaglio nel prossimo paragrafo.
Un’alternativa al sistema a proiettore singolo è rappresentata dalla combinazione
di più proiettori, generalmente da tre a sei, che si spartiscono l’intera superficie della
cupola. Questo sistema può essere molto redditizio in termini di risoluzione dell’immagine ed è praticato nei planetari che utilizzano cupole grandi e fisse. Presenta
tuttavia alcuni punti deboli che saranno qui descritti brevemente:
• utilizzando diversi proiettori possono presentarsi problemi di allineamento, soprattutto nelle zone di raccordo tra fasci di proiettori contigui; è ben visibile
all’occhio se si creano immagini doppie ed è quindi bene evitarlo, effettuando
controlli e riallineamenti periodici;
• la vita media delle lampade può variare da proiettore a proiettore e questo può
generare delle leggere discrepanze di luminosità tra le varie zone;
• la manutenzione e i costi operativi vanno moltiplicati per ogni proiettore, dovendo anche considerare che spesso ogni proiettore ha la sua unità pc e il tutto
è gestito da un computer di controllo. Va da sé, dunque, che questo sistema è
assolutamente meno economico rispetto alla soluzione singola, e laddove non
sia veramente necessario è da ritenersi sconsigliabile. In planetari di mediopiccole dimensioni, tutt’al più, conviene investire su un videoproiettore più
prestante.
2
In ambito fotografico, un fisheye, letteralmente “occhio di pesce”, è un obiettivo grandangolare
estremo che abbraccia un angolo di almeno 180 gradi; esistono lenti fisheye con campo superiore a
180 gradi.
3.2 Sistema a proiettore singolo
Per tutti questi motivi è sempre preferibile, in presenza di configurazioni di ridotte dimensioni e semovibili, optare per un sistema a proiettore singolo, più economico,
compatto, trasportabile e di facile gestione.
3.2
Sistema a proiettore singolo
La soluzione migliore per un planetario mobile con cupola gonfiabile è senza dubbio
il proiettore singolo; in questo lavoro si è fatta dunque tale scelta anche dettata dalla
semplicità nella sua realizzazione.
Un apparato a proiezione singola su cupola semisferica ha due componenti principali:
1. videoproiettore: serve per proiettare sullo schermo, in questo caso sulla cupola,
le immagini elaborate dal programma in uso;
2. elementi ottici: servono per deformare l’immagine che esce dal proiettore e
renderla visibile su una superficie sferica.
3.2.1
Videoproiettore
Una serie di criteri riguardanti le caratteristiche del videoproiettore vanno tenuti in
considerazione per la scelta dello strumento migliore da utilizzare in un apparato
che proietti su cupola. I parametri più importanti sono:
• flusso luminoso (F ): a seconda delle dimensioni fisiche della cupola, il requisito
minimo può variare. Per diametri fino a 6 metri può bastare un flusso tra i
1000 e 2500 lumen3 , per diametri maggiori sono necessari tra i 3000 e i 4500
lumen;
• risoluzione nativa: risoluzione di base per cui è stato progettato il videoproiettore; consigliabile la miglior risoluzione possibile: 1920x1080 (Full HD) o
altrimenti 1024x768 (XGA);
• contrasto: valori superiori a 1:2000;
• livello del nero: i videoproiettori non riescono sempre a produrre un nero intenso e le differenze tra i vari modelli sono notevoli. È da tenere in considerazione
che più luce viene emessa dal proiettore, più il nero apparirà grigio: è inutile, ad esempio, utilizzare un fascio da 5000 lumen su una cupola di 5 metri
perché si otterrà soltanto uno sgradevole effetto grigiastro. A quelle dimensioni 1000 lumen garantiscono già un livello sufficiente di illuminazione e inoltre
forniscono una buona profondità del nero;
• tecnologia: preferibilmente DLP o altrimenti LCD (LCOS più costosa); la
nuova tecnologia LED/Laser sembra essere molto promettente in termini di
longevità della lampada, ma è ancora da perfezionare. Ulteriori dettagli sulle
varie tipologie saranno forniti a seguire.
3
Unità di misura del flusso luminoso, definito come il flusso prodotto da una sorgente luminosa
che emette una candela di intensità luminosa su un angolo solido di uno steradiante.
55
56
3. L’apparato sperimentale: l’hardware
I sistemi di proiezione digitali costruiscono l’immagine del cielo stellato sottoforma di una grande matrice di pixel, perciò maggiore è il numero di pixel in grado di essere visualizzati dal sistema, migliore sarà l’esperienza osservativa. Mentre la prima
generazione di videoproiettori digitali non riusciva a generare un numero sufficiente
di pixel tale da pareggiare la qualità dei tradizionali proiettori opto-meccanici, i sistemi d’avanguardia di oggi offrono risoluzioni che si avvicinano al limite dell’acutezza
visiva dell’occhio umano.
Un’ampia gamma di tecnologie di videoproiezione è stata sino ad oggi impiegata
nel settore: CRT (Cathode Ray Tube), DLP (Digital Light Processing), LCD (Liquid Crystal Display), LCOS (Liquid Crystal On Silicone) e proiettori LED/laser.
L’utilizzo di proiettori LCD è stato fortemente ostacolato dai limiti fondamentali
che mostrano nella loro capacità di proiettare il nero intenso e la luce brillante. La
tecnologia LCOS ha portato a un miglioramento nel rapporto di contrasto de precedenti LCD, eliminando anche l’effetto schermo generato dagli spazi vuoti tra i pixel
LCD. Proiettori DLP offrono soluzioni a buon mercato, immmagini brillanti e livello
del nero apprezzabile. Con l’avanzamento della tecnologia e l’abbattimento dei costi,
la proiezione laser e LED sembra acquisire sempre più credito, avendo come punti a
favore l’ampio intervallo dinamico in luminosità e l’estremo spazio dei colori.
Alcuni modelli consigliati allo scopo4 :
• Optoma HD800X (fuori produzione);
• Optoma HD800XLV (fuori produzione);
• Vivitek HD1086 (fuori produzione);
• Dell 7609WU (fuori produzione);
• ACER H7530D;
• ACER P1500;
• Vivitek 5280U 1920x1200;
• Projectiondesign F22 1920x1200;
• Projectiondesign F35 2560x1600.
I modelli fuori produzione sono comunque utili come riferimento per la ricerca di
modelli simili e in ogni caso possono essere acquistati sul mercato dell’usato. Gli
ultimi tre modelli presentano caratteristiche più avanzate rispetto agli altri, come
ad esempio la possibilità di regolare l’allineamento dell’ottica su due assi. Questo,
come si vedrà in seguito, può essere cruciale quando bisogna essere molto precisi
nel far sı̀ che tutto il sistema sia ben allineato sull’asse ottico. Ovviamente anche i
prezzi possono variare di molto e se per i primi modelli ci si aggira tra i 500 e i 1000
euro, per quelli più tecnologici si può arrivare ad alcune migliaia o decine di migliaia
di euro. L’ampia gamma di possibilità consente di fare una scelta oculata in base al
proprio budget e all’uso che se ne vuole fare.
4
Per confrontare i modelli e vederne le caratteristiche può risultare molto utile il sito web
http://www.projectorcentral.com.
3.2 Sistema a proiettore singolo
3.2.2
57
Componenti ottici
Per poter proiettare su una superficie curva, un’immagine tradizionale rettangolare
deve essere prima trasformata mediante software e poi mediante hardware. Questo
secondo step viene svolto dal sistema ottico aggiuntivo, che si va a frapporre tra il
videoproiettore e lo schermo, in grado di “correggere” l’immagine e visualizzarla in
modo appropriato da tutti i punti sotto la cupola.
Due sono i sistemi che possono essere utilizzati per questo scopo: il primo prevede
l’utilizzo di uno specchio sferico convesso sul quale far riflettere il fascio proveniente
dal proiettore e l’altro di un obiettivo fotografico fisheye attraverso il quale proiettare.
Si analizzeranno adesso più in dettaglio analogie e differenze tra i due metodi e si
cercherà di fare luce sulle motivazioni che portano alla scelta dell’uno o dell’altro.
Specchio sferico
In uno specchio sferico convesso i raggi che provengono paralleli vengono riflessi in
maniera divergente, essendo il punto di divergenza un punto apparente all’interno
della sfera che sta “dietro” lo specchio (figura 3.4). Gli specchi più comuni e a buon
mercato sono fatti di materiale plastico, ma se ne trovano anche di vetro. Bisogna
tenere in considerazione, tuttavia, che poiché normalmente gli specchi sono composti
da due superfici sovrapposte, quella interna riflettente e quella esterna protettiva,
possono comparire due immagini leggermente sfasate tra loro: l’immagine principale
e una secondaria più debole, proveniente dalla superficie frontale.
Ra
gg
io
rifl
ess
o
Fascio parallelo
P
F
Specchio convesso
Figura 3.4: Schema ottico di uno specchio sferico convesso: i raggi che provengono
paralleli vengono riflessi in maniera divergente.
Un comune specchio, infatti, consiste di una lastra di vetro su cui è depositato un
sottile strato di argento o alluminio, fissato al vetro tramite un processo di alluminatura, ovvero deposizione in alto vuoto di vapori di alluminio. Lo strato metallico
58
3. L’apparato sperimentale: l’hardware
riflettente è quindi visto attraverso il vetro cha ha la funzione di proteggere il delicato rivestimento da corrosione, graffi e altri agenti esterni; questo tipo di specchi
riflette circa l’80% della luce incidente.
Figura 3.5: Specchio sferico in prima superficie.
Per eliminare il problema della riflessione secondaria e aumentare la percentuale
di luce riflessa si ricorre a specchi in prima superficie, anche detti ad alluminatura
frontale (fig. 3.5). Questo genere di specchi di alta qualità viene utilizzato nei
telescopi e altri strumenti ottici sofisticati; sono piuttosto costosi e non si trovano
molte aziende che li fabbricano in geometria sferica.
Il processo di alluminatura frontale, in cui cioè lo strato metallico è applicato
sulla prima superficie del vetro, elimina le doppie riflessioni e aumenta a circa il 95%
la riflettività dello specchio. Per questi motivi è raccomandabile l’utilizzo di specchi
in prima superficie se si vuole ottenere una buona qualità dell’immagine nella proiezione, che nello stesso tempo, però, impone particolare attenzione nel maneggiare
lo strumento. A volte la superficie riflettente è coperta da uno strato protettivo per
prevenirne l’ossidazione e la corrosione. Il rivestimento necessita di essere riapplicato
periodicamente per mantenere elevate le prestazioni; se non si dispone di un laboratorio di alluminatura, è comunque possibile misurare la riflettività dello specchio
con strumenti dedicati, come il riflettometro, e rivolgersi a officine specializzate se
si necessita di un intervento.
A seconda dell’orientazione della cupola, lo specchio deve essere posizionato su
un lato: a terra nel caso di cupola dritta, e nel punto più in alto del supporto nel
caso di cupola rialzata (vedi fig. 3.6). La posizione del proiettore deve essere ben
allineata con quella dello specchio, in modo che la luce riflessa dalla superficie sferica
3.2 Sistema a proiettore singolo
59
Cupola
Specchio
sferico
Proiettore
Figura 3.6: Specchio sferico con cupola inclinata e rialzata. Il videoproiettore è
posizionato a terra, mentre lo specchio è adagiato a raso del supporto della cupola.
vada a riempire tutta la cupola; perché tutto sia ben allineato e il risultato della
proiezione soddisfacente, non esistono regole fisse universali, ma bisognerà affidarsi
ad alcuni test preliminari e all’esperienza. Nel caso di cupole inclinate, è bene dotarsi
di supporti per il proiettore e per lo specchio che siano reclinabili di alcune decine
di gradi; una soluzione semplice per iniziare è prendere in prestito un solido leggio
(o uno stand per amplificatore) da un amico musicista.
Cupola
Specchio sferico
primario
Proiettore
Specchio
secondario
Figura 3.7: Specchio sferico con cupola dritta.
Alla configurazione di base sin qui descritta si può aggiungere uno specchio piano
secondario (fig. 3.7), il vantaggio del quale consiste nel fatto che il proiettore col suo
60
3. L’apparato sperimentale: l’hardware
eventuale supporto non saranno più obbligati a stare al centro della cupola e si potrà
utilizzare quello spazio per far accomodare altri spettatori. Ovvi svantaggi sono il
costo addizionale e l’ulteriore complicazione all’allineamento generale: proiettore,
specchio piano secondario e specchio sferico primario devono essere simultaneamente
e correttamente allineati sull’asse ottico affinché l’immagine proiettata sia completa
e luminosa.
Figura 3.8: Tipico assetto con proiettore, specchio secondario piano e primario
sferico.
Nell’immagine 3.8 si può notare come lo specchio secondario sia piuttosto vicino al videoproiettore; bisogna lasciare giusto lo spazio necessario affinché l’immagine riflessa non vada ad incidere sul proiettore stesso, ma vada invece a colpire
direttamente lo specchio sferico.
Una volta effettuato l’allineamento fine che coinvolge i tre elementi, e tutti gli
angoli relativi sono stati messi a punto, si può anche optare per una soluzione compatta che lasci inalterata la configurazione ad ogni utilizzo. Un esempio è il vano
trasportabile realizzato dall’Università dello stato di Washington (Seattle, WA, Stati Uniti). La figura 3.9 mostra la soluzione adottata nel progetto di Seattle, con lo
specchio sferico assemblato insieme agli alloggiamenti del proiettore e dello specchio
secondario.
La casa produttrice di cupole Go-Dome ha brevettato anche un sistema analogo
di proiezione con specchio sferico incorporato. Il modello Newtonian2 utilizza infatti
uno specchio Go-Vex 5 , uno strumento di precisione altamente resistente a graffi,
5
Newtonian2 e Go-Vex sono entrambi marchi registrati Go-Dome.
3.2 Sistema a proiettore singolo
Figura 3.9: Vano porta ottiche realizzato in legno, University of Washington Mobile Planetarium (ref. [18]). Subito sotto lo specchio sferico primario è situato l’alloggiamento per il proiettore, davanti al quale si trova l’altro alloggiamento destinato allo specchio piano secondario.
Sul sito http://www.astro.washington.edu/groups/outreach/mplanetarium/about.html è
possibile consultare e scaricare la guida completa alla costruzione del vano.
polvere e ossidazione e la cui omogeneità superficiale garantisce una proiezione di
qualità per lunghi periodi di tempo. Si tratta comunque di uno strumento molto
delicato che mantiene le sue caratteristiche solo se trattato con cura e particolare
attenzione (vedi fig. 3.10).
Il contenuto da proiettare su una superficie emisferica come quella di una cupola
per planetario si trova comunemente sottoforma di immagini fisheye, catturate con
tali obiettivi fotografici o manipolate via software, in formato 1:1 (rapporto d’aspetto
quadrato). Per la proiezione con specchi sferici, invece, si preferisce il formato 16:9
perché utilizza una maggiore perecentuale dei pixel di cui è composta l’immagine che
esce dal proiettore (di fatto il formato HD supportato ormai da tutti i videoproiettori
è proprio un formato 16:9, 1920x1080 pixel). Se si vuole proiettare senza distorsioni
un’immagine fisheye sulla cupola, è necessario utilizzare quindi una lente fisheye
posta al centro della stessa; se si provasse ad utilizzare uno specchio sferico il risultato
ottenuto sarebbe ben lontano da quello desiderato.
Tuttavia è possibile manipolare l’immagine fisheye in modo da compensare l’effetto di distorsione introdotto dallo specchio e ottenere un’immagine corretta sulla
cupola. Questa operazione viene chiamata in gergo tecnico “warping”, letteralmente
distorsione o deformazione. In termini pratici si applica l’immagine fisheye a una
“mesh” (in italiano maglia) costruita secondo un’opportuna griglia di coordinate.
La mesh e la corrispondente griglia di coordinate possono essere generate mediante software specifici e una volta create vengono implementate nei programmi che
supportano questo genere di operazioni. È possibile creare una mesh su un qualsiasi
61
62
3. L’apparato sperimentale: l’hardware
Figura 3.10: Modello Newtonian2 della Go-Dome.
sistema di coordinate, dalle più regolari, come quelle polari e cilindriche, alle più
complesse e fantasiose. Alcuni software planetari come Stellarium sono già provvisti
sia della funzione per la deformazione fisheye sia del warping per proiezione con
specchio sferico. Un progetto di notevole interesse, al quale si rimanda per ulteriori
dettagli riguardo la proiezione con specchio sferico e warping delle immagini, viene
portato avanti da Paul D. Bourke, direttore associato alla University of Western
Australia (Perth, Australia) e prima alla Swinburne University of Technology di
Melbourne (ref. [19]).
Nella figura 3.11 in basso, un esempio di mesh per proiezione sferica. Come si
può notare dai dati in alto a sinistra, la geometria della maglia viene specificata dalla
posizione del proiettore, dalla distanza, dal formato dell’immagine di partenza, dalla
posizione e raggio dello specchio sferico, dal raggio e posizionamento della cupola.
In figura 3.12 un esempio di immagine fisheye distorta per essere proiettata con uno
specchio sferico.
Un sistema di proiezione mediante specchio sferico, dunque, consiste in una porzione di specchio sferico, circa un quarto, un videoproiettore puntato verso lo specchio (secondario, se previsto) e un computer su cui gira un software planetario. Il
software deforma tutte le immagini e tutti i frame video prima di inviarli al proiettore, in modo da controbilanciare la distorsione drastica dovuta allo specchio;
una volta riflesse dallo specchio, sulla cupola compaiono le immagini dritte e ben
proporzionate.
I sistemi di proiezione che fanno uso di uno specchio sferico:
• vengono posizionati al bordo della cupola, lungo la zona perimetrale, lasciando
cosı̀ la zona centrale (dove la risoluzione è migliore) libera per gli spettatori;
3.2 Sistema a proiettore singolo
Figura 3.11: La mesh polare (in alto) distorta via software in una mesh per specchio
sferico (in basso). Crediti: Paul Bourke.
63
64
3. L’apparato sperimentale: l’hardware
Figura 3.12: Esempio da “Moonlight” di Andrew Quinn. A sinistra l’immagine
iniziale fisheye costruita su reticolo polare; a destra il warping per proiezione con
specchio sferico. Crediti: Paul Bourke.
• sono in grado di proiettare buona parte dei pixel (circa il 75%) dell’immagine:
la geometria del sistema, infatti, fa sı̀ che un’immagine che esce da un proiettore
1920x1080 in formato 16:9 risulti in circa 1 milione e mezzo di pixel proiettati
su un totale di poco più di 2 milioni di pixel di partenza;
• non riescono a coprire l’intera superficie della cupola: la parte che sta dietro
lo specchio è in ombra (vedi fig. 3.7);
• possono produrre pixel non uniformi in dimensione e fuoco: la qualità dell’immagine può variare tra varie zone della cupola;
• utilizzano specchi in prima superficie con alluminatura frontale, estremamente
delicati e facili da danneggiare al semplice contatto;
• sono sistemi completamente modulari: se si vuole passare a un proiettore più
efficiente basta semplicemente cambiarlo;
• non garantiscono un livello del nero omogeneo su tutta la cupola, il che può
risultare in una luminosità variabile del cielo notturno;
• possono introdurre artefatti visivi causati dal processo di warping: questi possono verificarsi quando un frame originale viene deformato e alcuni dettagli
devono essere compressi, risultando in una qualità dell’immagine inferiore.
Questo genere di effetti può essere più evidente nel campo stellare, dove il
contrasto di luminosità e colore è più accentuato, piuttosto che in immagini
o video. Le linee delle costellazioni o le stelle più deboli possono subire distorsioni e difetti estetici su varie scale, e la qualità dell’immagine ne risentirà.
Gli effetti dovuti al processo di warping possono dipendere da molti fattori,
non ultimi il tipo di software che si sta utilizzando e il modo in cui esso viene
configurato.
3.2 Sistema a proiettore singolo
Figura 3.13: Sistema di proiezione con pc, proiettore e specchio sferico in uso.
Il sistema con specchio sferico, come quello mostrato in figura 3.13, può essere
utilizzato sia in planetari fissi sia in quelli portatili, di qualunque dimensione. Ad
oggi le installazioni fisse più grandi raggiungono i 15 metri di diametro della cupola;
un esempio è il Birla Planetarium del Tamilnadu Science Centre in India. Cupole
più grandi richiedono semplicemente videoproiettori più luminosi.
Nelle operazioni di trasporto, questa soluzione può risultare non sempre comoda,
per via delle dimensioni e della fragilità dello specchio; tuttavia si può ovviare al
problema nel caso si riesca a compattare tutto in un’unica scatola trasportabile
e assai più maneggevole. Ad ogni modo, un apparato che utilizza al posto dello
specchio un obiettivo fisheye sembra essere da questo punto di vista la soluzione più
consigliabile.
65
66
3. L’apparato sperimentale: l’hardware
Obiettivo fisheye
Una lente fisheye (a occhio di pesce), cosı̀ chiamata per via della caratteristica forma
delle immagini prodotte, è un obiettivo grandangolare estremo che produce una forte
distorsione visiva atta a creare immagini panoramiche o emisferiche. È in grado di
riprodurre angoli di vista molto ampi e, attraverso una mappatura speciale che non
segue le linee prospettiche rettilinee, vanno a rivestire le immagini di un caratteristico
aspetto “convesso”. Il termine “fisheye” si deve al modo in cui apparirebbe a un
pesce sott’acqua la vista di ciò che è sopra la superficie, attraverso un cono di luce
di circa 96 gradi: questo fenomeno è causato dalla rifrazione dei raggi entranti
nell’acqua, che per le leggi di Snell vanno a creare un cerchio di luce, al di fuori del
quale è completamente buio (effetto chiamato “Finestra di Snell”, fig. 3.14).
Figura 3.14: “Finestra di Snell”, particolare effetto che si verifica nell’acqua e che
dà il nome alla lente fisheye.
L’angolo di vista di un fisheye è solitamente compreso tra 100 e 180 gradi, sebbene
alcuni eccedano questo valore; mentre la lunghezza focale dipende dal formato per
il quale viene progettato. I raggi provenienti da tutte le direzioni entro il campo
di vista convergono verso il piano focale dove solitamente è situato il sensore o la
pellicola fotografica . In figura 3.15, lo schema ottico di un obiettivo fisheye cosı̀
come appena descritto.
Due sono i tipi di lenti fisheye più diffusi: fisheye circolare e fisheye “full frame” (a pieno formato). Entrambi seguono la stessa geometria della trasformazione;
l’unica differenza, come si può ben vedere in figura 3.16, è il campo di vista dell’immagine distorta: per un fisheye circolare l’immagine entra completamente nel frame,
risultandone inscritta e lasciando cosı̀ gli angoli vuoti; nel caso full frame, invece, il
cerchio dell’immagine è circoscritto al frame. In questo modo non saranno lasciati
spazi vuoti agli angoli, ma si avrà perdita di immagini lungo le zone perimetrali.
3.2 Sistema a proiettore singolo
67
Raggi
emergenti
Piano della
pellicola
Diaframma
Raggi incidenti
Figura 3.15: Schema ottico di un obiettivo fotografico fisheye.
Esistono diverse classi di lenti fisheye, che deformano le immagini in maniera leggermente differente; la distorsione segue quella che in gergo viene chiamata funzione
di mappatura. La mappatura più comune è il fisheye equidistante in cui R = f · θ,
dove θ è l’angolo in radianti tra un punto nel mondo reale e l’asse ottico, f la lunghezza focale della lente e R la posizione radiale del punto nell’immagine su pellicola
o sul sensore.
(a) Circolare.
(b) Full frame.
Figura 3.16: La stessa immagine vista da un obiettivo fisheye circolare (a) e uno full
frame (b). Nell’immagine di sinistra si nota il frame quadrato con gli angoli vuoti; in
quella di destra il frame è invece rappresentato dal riquadro rettangolare al centro.
68
3. L’apparato sperimentale: l’hardware
Tipiche lunghezze focali di lenti fisheye su sensori o pellicole a pieno formato (35
mm) sono tra gli 8 e i 10 millimetri per immagini circolari e tra i 15 e i 16 millimetri
per immagini full frame. Nel caso di sensori a formato ridotto (come ad esempio
l’APS-C usato dalle moderne reflex digitali) la lunghezza focale può arrivare anche
a 1 o 2 millimetri.
Un sistema ottico che utilizza un obiettivo fisheye per proiettare su superficie
sferica può essere assemblato secondo i criteri di Yves Lhoumeau, professore al conservatorio di Belfort e astronomo entusiasta. Il progetto di Lhoumeau, Lhoumeau
Sky System o LSS (cfr. [20]), consiste nella realizzazione di un gruppo ottico composto da due obiettivi fotografici assemblati in una configurazione tanto semplice
quanto sicuramente poco ortodossa: un fisheye circolare e un obiettivo standard con
caratteristiche mirate allo scopo.
Quale sia il compito della lente fisheye è già stato esplicitato fin qui; vale la pena
a questo punto spendere due parole riguardo il ruolo dell’altro obiettivo. Il fisheye
non può essere posizionato direttamente davanti al proiettore perché l’immagine non
sarebbe bene a fuoco e sarebbe troppo grande da entrare completamente nella lente
posteriore. Rimuovere la lente del proiettore sostituendola con il fisheye risolve il
problema della dimensione. Tuttavia la messa a fuoco non è ancora ottimale, in
quanto la lunghezza focale posteriore standard delle lenti per videoproiettori è di
circa 80-100 mm, mentre quella del fisheye è assai più ridotta (42 mm circa). Una
buona soluzione è estendere questa distanza con l’ausilio di una lente divergente,
come una lente di Barlow. Ad ogni modo la cosa più semplice da fare è utilizzare
Obiettivo
fisheye
Specchio
Proiettore
Lente
condensatrice
Figura 3.17: Schema ottico di tutto il blocco.
una “lente condensatrice” tra il proiettore e il fisheye, che produce un’immagine delle
giuste dimensioni (tipicamente 24 mm di diametro) e alla distanza corretta (vedi
schema ottico in figura 3.17). Tale lente raccoglie il fascio di luce dal proiettore e
lo fa convergere verso il fisheye. I due obiettivi sono dunque accostati retro contro
retro (fig. 3.18), con il fisheye che lavora al contrario rispetto allo standard: invece
di raccogliere la luce dalla lente anteriore e inviarla verso il fuoco, riceve i raggi dalla
lente posteriore e la distribuisce a 180 gradi attraverso quella anteriore.
Un obiettivo fotografico standard a focale fissa 50 mm, f/1.4 funziona perfettamente come condensatore di immagini, mentre con un f/1.8 l’immagine potrebbe
non risultare completa; il diametro della lente posteriore d’uscita deve essere 24 mm
3.2 Sistema a proiettore singolo
Figura 3.18: I due obiettivi assemblati nella configurazione verticale, senza specchio
a 45 gradi: il 50 mm in basso, il fisheye in alto.
o maggiore, onde evitare di avere immagini tagliate. Tipicamente la distanza tra
la lente condensatrice e il fisheye è di circa 84 mm, data dalla somma delle due
lunghezze focali posteriori degli obiettivi, pari a 42 mm ciascuno.
Riassumendo brevemente le propietà dei due componenti:
• Caratteristiche della lente fisheye:
– lunghezza focale molto piccola (circa 8 mm);
– lunghezza focale posteriore di circa 42 mm (distanza tra l’ultimo elemento
ottico e il fuoco);
– distorsione sferica dell’immagine;
– produce immagini circolari, tipicamente di 24 mm di diametro.
• Caratteristiche della lente condensatrice:
– lunghezza focale 50 mm;
– lunghezza focale posteriore di circa 42 mm;
– ampia apertura relativa del diaframma: f/1.4 (rapporto tra la focale
dell’obiettivo, 50 mm, e il diametro nominale dell’apertura di diaframma);
– diametro della lente posteriore superiore a 24 mm.
69
70
3. L’apparato sperimentale: l’hardware
Risoluzione
XGA (1024x768)
SXGA+ (1400x1050)
HD (1920x1080)
UXGA+ (1920x1200)
WQXGA (2560x1600)
Minimo
1000x1000
1400x1400
1600x1600
1600x1600
2200x2200
Massimo
1200x1200
1600x1600
2000x2000
2000x2000
2600x2600
Tabella 3.2: Tabella riassuntiva dei valori minimi e massimi di risoluzione per le
immagini fisheye da proiettare.
La messa a fuoco dell’immagine proiettata dipende drasticamente dall’allineamento tra i due obiettivi: devono essere posizionati precisamente sull’asse ottico,
altrimenti potrebbero risultare sfocate alcune zone sull’orizzonte della cupola. Il
campo di vista dipende invece dalla lunghezza focale posteriore della lente condensatrice, dall’obiettivo del videoproiettore (zoom e lunghezza focale) e dalle dimensioni
del fascio.
L’immagine intermedia prodotta dalla lente condensatrice può essere deflessa da
uno specchio piano posto a 45 gradi; per comodità si può usare una diagonale da
2 pollici per telescopio. In questo modo il proiettore non sarà obbligato a lavorare
in verticale, ma potrà essere adagiato in una più “naturale” posizione orizzontale,
limitando problemi di accumulo di polvere e calore. Sarà lo specchio della diagonale
a inviare l’immagine verso l’alto, proiettandola attraverso la lente fisheye (vedi fig.
3.19).
Figura 3.19: Assemblaggio secondo lo schema di Lhoumeau, con proiettore in
orizzontale e gruppo ottico provvisto di diagonale.
Le immagini che il fisheye è in grado di proiettare a tutta cupola, e che possono
anche essere scattate utilizzando lo stesso obiettivo montato su una macchina foto-
3.2 Sistema a proiettore singolo
grafica reflex digitale full frame, sono di forma quadrata e di risoluzione variabile.
Questa dipende in primo luogo dalla risoluzione del proiettore e non esistono regole
a priori adattabili a tutte le situazioni. Ad ogni modo, valori di riferimento sono
espressi in tabella 3.2, dove il minimo è il valore sotto al quale le dimensioni dell’immagine ne limiterebbero la qualità, e il massimo è il valore al di sopra del quale non
si apprezzerebbero miglioramenti.
Un sistema a proiettore singolo con obiettivo fisheye è dunque composto da un
gruppo ottico principale formato da una lente a focale fissa 50 mm e un fisheye
circolare da 8 mm di focale. Nella configurazione sul piano orizzontale, per certi
versi più comoda e affidabile, è previsto l’utilizzo di una diagonale frapposta tra i
due obiettivi, in modo che la luce proveniente dal primo venga deflessa a 90 gradi
verso il secondo, e proiettata cosı̀ verso l’alto.
Figura 3.20: Modelli della ditta spagnola Immersive Adventure, che sfruttano il
sistema LSS.
I sistemi di proiezione che fanno uso di una lente fisheye:
• sono posti al centro della cupola, risolvendo cosı̀ tutte le questioni riguardanti
il posizionamento dei vari componenti della proiezione, dal momento che in
questo caso sono tutti assemblati tra di loro. Al pubblico saranno riservati i
posti lungo una o più circonferenze perimetrali;
• proiettano il cielo a tutta cupola, utilizzando cioè tutta la superficie di proiezione, e favorendo cosı̀ un’esperienza didattica e scientifica totalmente immersiva;
• non richiedono processi di warping via software, ma sono in grado di proiettare le immagini fisheye originali in maniera immediata. I pixel proiettati
corrispondono ai frame sorgente, siano essi campi stellari o video fulldome;
• le dimensioni dei pixel è uniforme e costante su tutta la cupola;
71
72
3. L’apparato sperimentale: l’hardware
(a) Digitarium Epsilon.
(b) Digitarium Delta 3.
Figura 3.21: Planetari portatili della ditta americana Digitalis. A sinistra un modello
verticale con montatura Elevator, a destra un modello planare del tipo LSS.
• sono meno ingombranti e lasciano più spazio per i visitatori;
• sono facilmente aggiornabili o modificabili, basta semplicemente sostituire il
pezzo desiderato e rimontarlo. Non ci sono configurazioni software da fare o
da mantenere né alcun genere di incompatibilità;
• sono più semplici da configurare e più veloci da inizializzare
• proiettano un numero di pixel più limitato per via del formato 1:1;
• possono essere più maneggevoli, leggeri e trasportabili.
Anche nel caso di questi sistemi ottici, si possono realizzare soluzioni integrate
con assemblaggi più o meno rigidi delle varie parti; l’uso di contenitori, borse o
valigie rende più sicuro il trasporto e l’utilizzo. Esistono molti modelli industriali
(vedi fig. 3.20 e 3.21), il cui costo però è molto più elevato.
In conclusione, si può certamente affermare che le possibilità per la realizzazione
“fai da te” di un apparato per la proiezione su superficie sferica sono numerose. I pro
e i contro da considerare sono molteplici per l’uno o per l’altro metodo, ma si può
giungere a un risultato più che soddisfacente anche a fronte di costi relativamente
ridotti. La cosa da tenere sempre in considerazione è che il risultato finale è frutto di
3.2 Sistema a proiettore singolo
una commistione di elementi, ognuno dei quali apporta il suo contributo: è del tutto
inutile utilizzare una cupola di alta qualità e grandi dimensioni se poi si proiettano
immagini o video a bassa risoluzione; cosı̀ come è altrettanto sconveniente utilizzare
un sistema di proiezione all’avanguardia laddove si disponga di una cupola con una
superficie di qualità scadente. Solo l’esperienza e accurate ricerche portano alla
scelta della giusta ricetta da mettere in pratica.
Per quanto riguarda il progetto di planetario qui in esame, la scelta è ricaduta
su un sistema di proiezione singolo con ottica fisheye. Si riassumono brevemente i
criteri che hanno portato a decretare questa opzione la migliore possibile:
qualità della proiezione : messa a fuoco ottimale e contrasto uniforme sulla quasi
totalità della superficie di proeizione;
durata e affidabilità : sistema estremamente maneggevole e resistente; la pulizia
delle lenti può essere effettuata con un normale kit per obiettivi fotografici;
copertura della proiezione : sistema fulldome, a tutta cupola, per una esplorazione dello spazio immersiva e avvolgente;
risoluzione effettiva : dimensione dei pixel costante e unifome su tutta la cupola;
semplicità di utilizzo : una volta posizionato al centro della cupola, basta effettuare alcune piccole regolazioni angolari per allineare il tutto sull’asse ottico;
reperibilità dei materiali : tutte le componenti sono comuni oggetti di mercato
e facilmente sostituibili.
Nel prossimo capitolo sarà presentato in dettaglio il lavoro di progettazione e
realizzazione dell’apparato, dal reperimento delle componenti al loro assemblaggio e
seguente collaudo.
73
Capitolo 4
Realizzazione del planetario
digitale
Dopo aver affrontato in dettaglio le problematiche legate alla ricostruzione delle
posizioni dei corpi celesti e le enormi potenzialità fornite dalla tecnologia digitale, si
sono approfondite nel capitolo precedente le modalità con cui ci si può approcciare
alla proiezione del cielo virtuale in un ambiente immersivo e avvolgente come quello
di un planetario. Il fatto di dover proiettare immagini su uno schermo sferico,
rappresentato dalla cupola, porta alla necessità di introdurre nuovi elementi ottici in
grado di deformare le immagini prodotte a livello software e visualizzarle in maniera
corretta sulla superficie di proiezione. La tecnica più semplice ed efficace, seppur
sempre integrabile e migliorabile, scelta per questo lavoro, consiste nel proiettare le
immagini attraverso un obiettivo fisheye, secondo il sistema sviluppato da Lhoumeau
(vedi fig. 4.1).
Obiettivo
fisheye
Specchio
Proiettore
Lente
condensatrice
Figura 4.1: Schema ottico per l’allineamento degli assi (non in scala).
Si presenta dunque in questo capitolo il lavoro di progettazione e realizzazione
hardware dell’apparato sperimentale, che ho portato a termine grazie alla fondamentale collaborazione e alla strumentazione messa a disposizione dall’officina meccanica
del Dipartimento di Scienze dell’Università Roma Tre.
75
76
4. Realizzazione del planetario digitale
4.1
Gradi di libertà del sistema
Una volta scelta in via definitiva la configurazione di Lhoumeau, ho analizzato il
problema geometrico riguardante l’allineamento degli assi ottici, illustrato in figura
4.1. Rispetto all’asse ottico del proiettore, l’asse della lente condensatrice può risultare spostato secondo gli angoli α e β mostrati in figura 4.2, rispettivamente giacenti
sui piani perpendicolari xy e xz.
z
β
α
y
Asse ottico del proiettore
Asse ottico della lente
x
Figura 4.2: Allineamento angolare.
Una volta allineati gli angoli, e posizionati quindi parallelamente i due assi, è
necessario controllare che siano disposti esattamente l’uno sul prolungamento dell’altro, senza sfasamenti in y o in z. I possibili ∆y e ∆z sono illustrati in figura
4.3. L’allineamento assiale della prima lente col proiettore introduce quindi in totale
quattro gradi di libertà nel sistema, due dallo sfasamento angolare e due da quello
traslazionale.
Ma nella realizzazione meccanica dell’apparato ottico si deve tener conto di altri
due gradi di libertà, associati all’allineamento dell’asse ottico del fisheye con la
verticale: la proiezione deve infatti essere esattamente centrata sullo zenit, ovvero il
punto più in alto sopra la nostra testa. L’obiettivo fisheye può puntare in direzioni
errate individuate dagli angoli ϑ e ϕ, che rapprensentato gli ulteriori due gradi di
libertà del sistema. Gli angoli, rispettivamente sul piano yz e sul piano xz sono
mostrati in figura 4.41 .
Il sistema di proiezione deve dunque prevedere regolazioni su sei gradi di libertà
totali, e nei paragrafi seguenti verranno illustrate le soluzioni realizzate dal punto
1
N.B. Gli angoli β e ϕ giacciono sullo stesso piano, ma non corrispondono allo stesso spostamento; il primo allinea il blocco ottico al proiettore, il secondo sposta tutto l’apparato rispetto alla
verticale, senza alterarne l’allineamento interno.
4.2 Reperimento degli elementi da assemblare
z
77
Asse ottico del proiettore
Asse ottico della lente
∆z
∆y
y
x
Figura 4.3: Allineamento traslazionale.
z
ϑ
ϕ
y
Asse ottico del fisheye
x
Figura 4.4: Allineamento con la verticale.
di vista meccanico. Ulteriori regolazioni di fino sono state aggiunte per rendere
l’operatività più confortevole.
4.2
Reperimento degli elementi da assemblare
L’apparato sperimentale, che nel suo insieme rappresenta il proiettore digitale per
planetario, prevede l’assemblaggio dei seguenti elementi:
78
4. Realizzazione del planetario digitale
(a) videoproiettore DLP: marca Asus modello P1500, HD 16:9, risoluzione nativa
1920x1080;
(b) obiettivo fotografico: marca Canon, focale fissa 50 mm f/1.4, attacco a baionetta;
(c) diagonale per telescopio: marca Bresser da 2 pollici;
(d) obiettivo fotografico fisheye circolare: marca Belomo modello EWP Fisheye
Lens MC 3.5/8A, focale 8 mm f/3.5, attacco a vite;
(a) Videoproiettore.
(b) Obiettivo Canon.
(c) Diagonale da 2”.
(d) Obiettivo fisheye.
Figura 4.5: I quattro elementi da assemblare: videoproiettore (a), obiettivo Canon (b),
diagonale (c), obiettivo fisheye (d).
4.3 Progettazione e lavorazione
4.3
Progettazione e lavorazione
Il lavoro di progettazione e seguente realizzazione della meccanica è stato separato
in due fasi, riguardanti rispettivamente il gruppo ottico e il supporto regolabile. È
stato necessario elaborare soluzioni che coprissero tutti gli spostamenti necessari,
con snodi, raccordi e slitte per ampie regolazioni. Tutto l’apparato è pensato in
maniera estremamente modulare, in modo da consentire modifiche e integrazioni
in maniera semplice e spedita: il gruppo ottico e il proiettore sono indipendenti,
collegati soltanto mediante una piastra di connessione alla quale sono separatamente
agganciati.
La realizzazione effettiva degli elementi di raccordo e altri di supporto è stata
ottenuta mediante lavorazione CNC (Computer Numerical Control) di lastre in lega
d’alluminio serie 60002 .
4.3.1
Gruppo ottico
Per assemblare il gruppo ottico è stato necessario realizzare due ghiere filettate: una
per connettere un lato della diagonale con l’attacco a baionetta del Canon, una per
connettere l’altro lato con l’attacco a vite del fisheye.
Figura 4.6: Prospetto e sezione della diagonale, filettatura M46 con passo da 0.75 mm.
In figura 4.7 la diagonale spogliata dai due raccordi da telescopio pronta per gli
adattatori degli obiettivi; ben visibile lo specchio piano all’interno.
2
Lega di alluminio, silicio e magnesio a media resistenza meccanica.
79
80
4. Realizzazione del planetario digitale
Figura 4.7: Diagonale smontata con specchio interno.
Le due ghiere consentono l’aggancio degli obiettivi fotografici alla diagonale, nelle
posizioni mostrate negli schemi di figura 4.8.
(a) Proiezione 3D in CAD.
(b) Disegno prospettico.
Figura 4.8: Elementi del gruppo ottico da assemblare: visione d’insieme.
Dalle sezioni prospettiche laterali è possibile avere un’idea anche delle distanze
relative tra gli elementi (fig. 4.9): il centro ottico della diagonale dista 46 mm
dalle rispettive flange posteriori degli obiettivi. Questa distanza è, in prima battuta,
approssimativa; è stata in via definitiva opportunamente ottimizzata agendo sullo
spessore delle ghiere.
4.3 Progettazione e lavorazione
81
Figura 4.9: Sezione laterale destra, cioè dal punto di vista di un osservatore posto
sul lato destro del proiettore.
(a) Sezione frontale.
(b) Sezione laterale sinistra.
Figura 4.10: Sezione frontale, cioè dal punto di vista del proiettore (a) e sezione dal lato
sinistro (b).
82
4. Realizzazione del planetario digitale
La prima ghiera ad essere realizzata è quella per il fisheye, più semplice perché
già provvista di una filettatura standard, rispetto all’attacco a baionetta del Canon.
La ghiera ha una filettatura da 46 mm di diametro da un lato e 42 mm dall’altro,
rispettivamente con passo da 0.75 mm e da 1 mm, la prima per l’avvitamento alla
diagonale e la seconda per l’obiettivo fisheye.
Figura 4.11: Sezione laterale destra: la parte colorata in grigio è lo spessore della
ghiera.
(a)
(b)
(c)
Figura 4.12: Sezione sinistra (a), frontle (b) e visione prospettica con ghiera (c).
4.3 Progettazione e lavorazione
In figura 4.13 il prospetto 3D del gruppo ottico, in rosso la ghiera di connessione
che permette di avvitare l’obiettivo fisheye e fissarlo cosı̀ alla diagonale.
(a) Rendering 3D intero.
(b) Rendering 3D in sezione.
Figura 4.13: Proiezione 3D del gruppo ottico: la parte colorata di rosso rappresenta lo
spessore della ghiera.
83
84
4. Realizzazione del planetario digitale
La ghiera è stata incisa in una lastra di alluminio 6000 utilizzando la macchina
a controllo numerico, concepita per lavori industriali ad altissima precisione, pari a
1/100 mm. Nella foto 4.14 un momento della lavorazione:
Figura 4.14: La macchina a controllo numerico in lavorazione sulla ghiera.
Una volta completata la realizzazione della prima ghiera per l’attacco al fisheye,
si è proceduto alla progettazione e lavorazione dell’altra, quella che connette la
diagonale all’attacco a baionetta Canon.
Il tipo d’innesto a baionetta (vedi fig. 4.15), introdotto nel 1987, viene utilizzato
da tutti gli obiettivi Canon EF (Electro Focus) del sistema EOS, sia per reflex
analogiche sia per quelle digitali. Si distingue dal precedente innesto cosiddetto
“breech/lock” che funzionava mediante un anello rotante; presenta il più ampio
diametro interno tra le macchine fotografiche reflex formato 24x36 (54 mm contro
i 42 dell’attacco a vite standard M42), consentendo quindi di avere obiettivi con
maggiori aperture destinati alle Canon EOS.
4.3 Progettazione e lavorazione
Figura 4.15: Attacco Canon EF con innesto a baionetta.
Figura 4.16: Tavola riferita alla ghiera di connessione tra il Canon e la diagonale.
La tavola in figura 4.16 si riferisce alla ghiera vista di profilo: sul lato sinistro
l’attacco all’obiettivo Canon, con diametro interno di 54 mm, e sul lato destro l’inne-
85
86
4. Realizzazione del planetario digitale
sto a vite nella diagonale. A questo punto si è in grado di connettere i due obiettivi
fotografici alla diagonale mediante le ghiere appena realizzate. In figura 4.17 la
sezione e la visione d’insieme di tutto il blocco:
Figura 4.17: Modello solido 3D del gruppo ottico: le due ghiere sono messe in evidenza
con colori diversi.
e quindi infine le ghiere e i due obiettivi montati sulla diagonale: il blocco ottico è
finalmente pronto (fig. 4.18).
Figura 4.18: Gruppo ottico assemblato. A sinistra: particolare sulle due ghiere; a destra:
gruppo ottico completo con entrambi gli obiettivi montati.
4.3 Progettazione e lavorazione
Il gruppo ottico deve ora essere connesso al videoproiettore, in maniera che sia
tutto il più possibile regolabile. Il prodotto finale deve garantire dunque che i due
oggetti restino stabilmente allineati sull’asse ottico, in una configurazione standard
del tipo mostrato in figura 4.19
Figura 4.19: A questo punto dei lavori si hanno due oggetti completi da collegare,
il gruppo ottico e il videoproiettore. L’allineamento non è immediato perché non si
conoscono con precisione le distanze focali relative di tutti gli elementi; per questo è
necessario inserire regolazioni su tutti i gradi di libertà.
87
88
4. Realizzazione del planetario digitale
4.3.2
Supporto regolabile
Durante la fase di progettazione del supporto regolabile che connette il gruppo ottico
al proiettore si sono inserite soluzioni per poter agire su tutti e sei i gradi di libertà
del sistema discussi all’inizio del capitolo. Il risultato è mostrato nello schema in
figura 4.20.
Figura 4.20: Schema 3D del supporto regolabile. 1: snodo; 2-3: montante; 4: piastra
scorrevole; 5: collare.
Se si fa riferimento alla figura 4.20, e si stabilisce la terna di coordinate spaziali xyz, con z asse verticale, x asse ottico del proiettore e y il restante asse
4.3 Progettazione e lavorazione
perpendicolare, allora si definiscono:
1. snodo per la regolazione dell’angolo intorno all’asse z (angolo α definito nello
schema di figura 4.2 all’inizio del capitolo);
2. montante per la rotazione intorno all’asse y (angolo β);
3. sempre sul montante, la traslazione lungo z (∆z in figura 4.3);
4. piastra scorrevole sull’asse y (regola il ∆y);
5. collare per la rotazione intorno all’asse x (angolo ϑ in figura 4.4), la cui
lavorazione è mostrata in figura 4.21.
I primi due servono per inclinare il gruppo ottico rispetto all’asse del fascio di uscita
dal proiettore, e rendere quindi l’asse della prima lente parallelo a quello del proiettore. Questo per far sı̀ che la luce vada a colpire il centro dello specchio della
diagonale, in modo da ottenere un’immagine completa e ben a fuoco. Il terzo e il
quarto regolano le traslazioni perpendicolari, per poter andare a far coincidere i due
assi. Lo scopo dell’ultimo elemento è definire la verticalità del fascio proiettato, in
modo che sia esattamente perpendicolare al piano del terreno. Per ottenere questo
risultato è necessario avere anche la possibilità di intervenire sull’angolo ϕ di rotazione intorno all’asse y, il che si ottiene sollevando o abbassando la parte posteriore
di tutto l’apparato (sono allo scopo inseriti dei piedini sotto il telaio, nelle fasi finali
della lavorazione).
Figura 4.21: Il collare prima di essere allacciato al gruppo ottico.
Sono queste tutte le soluzioni meccaniche realizzate per coprire i sei gradi di
libertà del sistema, soluzioni che permettono di intervenire sull’allineamento degli
assi ottici con precisione e puntualità. È stato inoltre montato uno slittone lungo
89
90
4. Realizzazione del planetario digitale
l’asse x, con la funzione di allontanare o avvicinare il gruppo ottico al proiettore,
andando cosı̀ a regolare la dimensione dell’immagine che entra nella lente condensatrice. È importante che sia la più piccola possibile per evitare tagli sui bordi; meglio
quindi ridurre al minimo la distanza, senza ovviamente che le due lenti vadano a
contatto. In figura 4.22 è mostrato il supporto regolabile nel suo insieme, prima
Figura 4.22: Il gruppo ottico completo di sistema regolabile a sei gradi di libertà.
di essere installato sul telaio base insieme al proiettore: slittone, piastra angolare,
snodo, montante e collare sono agganciati tra di loro e sorreggono il gruppo ottico.
4.3 Progettazione e lavorazione
4.3.3
91
Completamento dell’apparato
Una volta realizzato tutto il blocco ottico, completo del supporto regolabile, si è
ultimato il lavoro connettendolo, assieme al proiettore, a un telaio di base. L’attacco
del blocco regolabile al telaio avviene direttamente avvitando lo slittone mediante
due viti di scorrimento; al contrario, per il videoproiettore è necessario realizzare
una piastra di supporto dotata di un sistema di sospensione per il proiettore, che
consenta il naturale ricircolo dell’aria ed eviti il surriscaldamento dello stesso. La
soluzione migliore è rappresentata in questo caso da piedini regolabili in altezza (vedi
fig. 4.23).
(a)
(b)
(c)
Figura 4.23: Tavole dell’insieme proiettore più gruppo ottico. Nelle miniature in basso,
retro (a), profilo (b) e fronte (c), si possono notare i piedini distanziali che poggiano
sulla piastra di supporto agganciata al telaio base.
I piedini regolabili, oltre alla funzione distanziale, danno un’ulteriore garanzia
nell’allineamento fra il videoproiettore e il blocco ottico, estendendo cosı̀ le possibilità
di regolazione di tutto l’apparato.
92
4. Realizzazione del planetario digitale
Figura 4.24: Gruppo ottico con supporto regolabile e proiettore: modello 3D di profilo,
dal basso e visuale d’insieme.
La figura 4.24 mostra anche una visuale dal basso per poter apprezzare il sistema
con cui la piastra di supporto del proiettore e lo slittone saranno avvitati al telaio
base.
Figura 4.25: Al centro del telaio, nella parte anteriore, è posizionata una bolla di
livellamento per facilitare le operazioni iniziali di allineamento col piano del terreno.
Questa configurazione è già ottimale e funzionante; in ultima analisi si sono
aggiunti alcuni dettagli tecnici e piccoli ritocchi atti a perfezionare e rifinire l’opera.
Un aspetto tecnico importante, riguardante l’allineamento ottico, consiste nel fatto
che il fascio di luce non esce orizzontalmente dal proiettore, bensı̀ con un angolo di
pochi gradi rispetto al piano: è stato per questo inserito un meccanismo a vite in
4.3 Progettazione e lavorazione
grado di modulare l’elongazione dalla piastra di supporto, per regolare l’inclinazione
del proiettore e garantire cosı̀ l’allineamento con l’asse della prima lente.
Il lavoro si completa quindi con l’assemblaggio delle due parti al telaio base,
sempre di Al6000, modellato e alleggerito delle parti non necessarie, attrezzato di
quattro piedi regolabili e una bolla di livellamento (ben visibile in figura 4.25) per
una prima taratura dell’allineamento sul piano. Un particolare del telaio base e del
sistema di aggancio al supporto regolabile è mostrato nella figura 4.26.
Figura 4.26: Particolare del supporto regolabile: in primo piano slittone e snodo con
viti a brugola per le regolazioni.
È stato assemblato anche un tavolino leggero e portatile per avere sempre un
supporto dedicato esclusivamente al proiettore: comodo da portare quando si fanno
attività di planetario nelle scuole. Dotato anch’esso di sistema di messa in bolla
e gambe regolabili, funzione utile laddove, a seconda delle situazioni, ci si trovi a
dover modificare l’altezza a cui posizionare il proiettore sotto la cupola.
Già dai primi test, l’apparato sperimentale, illustrato in figura 4.27, ha dato
riscontri molto positivi. Le immagini vengono proiettate senza distorsioni e sia la
luminosità sia il fuoco sono soddisfacenti. Le difficoltà maggiori si riscontrano sull’allineamento dell’asse ottico, con conseguenze sull’angolo di proiezione e sull’interezza
delle immagini: se la luce del proiettore non viene concentrata esattamente al centro dello specchio della diagonale, infatti, non uscirà esattamente sulla verticale e
il bordo interno della lente fisheye taglierà l’immagine. Un cammino ottico troppo
lungo, invece, determinato ad esempio da ghiere di raccordo troppo spesse, potrebbe
risultare in un angolo di proiezione minore di 180 gradi, con una perdita pari anche
a qualche decina di gradi.
È possibile tenere sotto controllo questa problematica svitando l’obiettivo fisheye
e, senza guardare direttamente con l’occhio onde evitare fastidi alla vista, verificare l’esattezza della posizione dell’immagine sullo specchio. Se questa appare molto
93
94
4. Realizzazione del planetario digitale
Figura 4.27: Postazione di lavoro completa di tutto l’apparato hardware: computer
e proiettore digitale.
distorta rispetto alla forma circolare o decentrata, spostare le posizioni relative utilizzando i supporti regolabili necessari finché non si ottiene il posizionamento desiderato. Per fare questa operazione è utile sfruttare la schermata di Nightshade con
la griglia altazimutale attivata: si ottiene un’immagine simile a quella mostrata in
figura 4.28. Utilizzando questo espediente è stata testata la geometria del cammino
ottico.
Figura 4.28: Vista dall’alto dello specchio interno alla diagonale: l’immagine che esce
dal proiettore viene concentrata dall’obiettivo 50 mm sullo specchio e la posizione
su di esso determina la correttezza nell’angolo di proiezione.
4.3 Progettazione e lavorazione
L’apparato sperimentale realizzato secondo i progetti e gli interventi presentati
in questo capitolo è allo stato dell’arte già utilizzabile e funzionante. A seguito
di alcuni test eseguiti con e senza cupola, si riscontra una qualità della proiezione
assolutamente apprezzabile, senza evidenti distorsioni della griglia di coordinate e
con una buona qualità della messa a fuoco su tutta la semisfera. In questo modo le
immagini risultano nitide nei limiti di risoluzione del sistema.
Con il presente apparato è già possibile avviare progetti di didattica e divulgazione a tutti i livelli, consentendo un’esperienza immersiva e avvolgente in tutti i campi
possibili della Scienza. La sua integrabilità ed estrema versatilità lasciano spazio a
migliorie e modifiche senza alcuna necessità di intervenire in maniera irreversibile
sulla struttura portante che è stata progettata proprio con un assetto modulare.
95
Capitolo 5
Conclusioni
Un planetario digitale è un apparato sperimentale che consente di determinare e
visualizzare in ogni momento le posizioni dei corpi celesti. Il primo step è compito
di un software planetario, come Nightshade, che attraverso routine di calcolo è in
grado di ricostruire istante per istante le coordinate dei pianeti, del Sole, della Luna e
di molti altri oggetti che popolano il cielo. I calcoli si basano su teorie di effemeridi
pubblicate dall’Istituto di Meccanica Celeste dell’Osservatorio di Parigi, le quali
garantiscono una precisione sulla posizione entro l’arcosecondo. Il secondo step, la
visualizzazione, è invece a carico di una struttura hardware opportuna, realizzata
mediante un proiettore digitale provvisto di ottica fisheye.
Scopo di questo lavoro di Tesi è stato proprio progettare e costruire un tale apparato di proiezione, assemblando vari elementi ottici a un videoproiettore digitale
per mezzo di un supporto leggero, solido e soprattutto regolabile. Come si è visto,
l’operazione più delicata e che ha richiesto più lavoro, sia progettuale sia meccanico, consiste nell’allineamento degli assi ottici, cruciale per il raggiungimento di una
proiezione di alta qualità, ben focalizzata, senza tagli nè difetti e uniforme su tutta
la superficie della cupola. Il proiettore è stato messo a punto e si è potuto verificare
come anche nell’ambiente buio di una cupola gonfiabile assicuri un risultato più che
soddisfacente.
Il planetario è uno strumento che offre molte opportunità alla didattica e alla
divulgazione. Le sue potenzialità educative vanno ricercate nella possibilità che esso
offre di modificare in modo sostanziale l’ambiente di apprendimento, spostando il
centro dell’azione educativa dall’istruzione passiva al coinvolgimento da parte dell’allievo. È infatti ormai accertato che la totale immersione e l’interattività sono i
due ingredienti fondamentali per rendere la Scienza attraente e di facile comprensione, in un contesto nel quale il visitatore vuole imparare divertendosi. Il planetario è
lo strumento ideale, sia per il pubblico generico che per le scuole, per comprendere
meglio le leggi che fanno apparire, sopra di noi, il cielo come lo vediamo. Ma oltre
alla sua utilità didattica, è anche un luogo speciale in cui ci si trova di fronte alla
magia di un cielo perfetto per l’osservazione notturna. È una grande risorsa per la
comunicazione della Scienza e non a caso trova una sempre maggiore diffusione nei
Paesi scientificamente e tecnologicamente più avanzati.
La proiezione del cielo stellato fornisce l’occasione di scoprire e approfondire i
97
98
5. Conclusioni
principali fenomeni celesti e i più attuali temi dell’Astronomia. Partendo dal moto
apparente del Sole in cielo, si può andare poi a scoprire come orientarsi di notte con
le stelle, facendo i conti con l’inquinamento luminoso; riconoscere la Luna, i pianeti,
le costellazioni e le loro leggende; soffermarsi sulle stelle, sui loro colori e sui luoghi
del firmamento che permettono di ricostruire la loro storia, tra ammassi stellari e
nebulose. Inoltre, si può esplorare la profondità del cielo, svelando l’ampiezza della
nostra galassia, e da lı̀ viaggiare verso le zone più lontane dell’Universo. Le risorse
tecniche del planetario comprendono anche la possibilità di realizzare degli script via
software, offrendo in questo modo opprtunità pressoché infinite di spaziare con la
fantasia e di farlo in maniera multimediale e interattiva: filmati, animazioni, schemi,
immagini e spettacolari foto di telescopi spaziali e sonde interplanetarie aiutano a
fornire un’informazione sempre aggiornata sulle ultime scoperte dell’Astronomia.
Oggigiorno, nonostante resti la parte essenziale e quella che costituisce il fondamento e la ragion d’essere del planetario, l’Astronomia classica è solo uno dei tanti
argomenti che possono essere oggetto di discussione e divulgazione in un planetario.
Un numero sempre crescente di altre discipline e branche della Fisica e della Scienza
si sta affacciando su questo ampio campo di sviluppo: spettacoli full-dome interdisciplinari conducono lo spettatore all’interno delle cellule e tra le eliche del DNA,
esplorano l’origine della vita sulla Terra e la possibilità che essa esista nello spazio
profondo lontano da noi; raccontano i miti dell’antichità classica, storie di leggende
e poemi epici.
Un esempio che illustra la trasversalità dello strumento planetario è l’esperimento ATLAS del CERN. Come annunciato dal CERN Bulletin nel 2011 (cfr. [21]),
infatti, uno spettacolo full-dome per planetario dal titolo “Phantom of the Universe
- The Hunt for Dark Matter Has Begun” è in fase di sviluppo. Il film è incentrato sul
tema della materia oscura, dal Big Bang fino ad arrivare al Large Hadron Collider.
Attraverso le parole di Michael Barnett, capo del Particle Data Group ed ex Education Coordinator per l’esperimento ATLAS a LHC, si può realmente capire cosa
spinga anche i grandi gruppi di ricerca a investire in queste opere: “La cosa davvero entusiasmante è che ora alle persone sembrerà veramente di essere all’interno
di un rivelatore o dentro il tunnel di LHC.” Il progetto ha visto il coinvolgimento di studenti dei dipartimenti di fisica, arte, comunicazione scientifica e scrittura
professionale, con lo scopo di realizzare un prodotto che meglio possa mostrare a
tutti il vasto programma di ricerca portato avanti dagli esperimenti di LHC. Nello
stesso bollettino del CERN viene sottolineato come questa iniziativa “contribuirà
enormemente ad esportare la fisica di LHC al grande pubblico mondiale”; sembra
infatti che lo spettacolo sarà trasmesso nei più importanti Planetari di ogni nazione.
Il planetario rappresenta dunque un nuovo canale di comunicazione, un modo
alternativo di fare Scienza e renderla fruibile a tutti. Mostrando i molteplici aspetti
del mondo in cui viviamo in maniera immersiva e coinvolgente, aiuta a comprendere
meglio i principi e le leggi che lo governano. Ci fa assaporare la Scienza, la Cultura
e le Arti, insegnando, informando, educando e, perché no, divertendo.
Bibliografia
[1] P. Bretagnon, G. Francou: “Planetary theories in rectangular and spherical variables. VSOP87 solutions”, Astron. Astrophys. 202, 309-315
(1988).
[2] P. Bretagnon: “Théorie du mouvement de l’ensemble des planètes.
Solution VSOP82”, Astron. Astrophys. 114, 278-288 (1982).
[3] B. W. Carroll, D. A. Ostlie: An Introduction to Modern Astrophysics,
New York: Addison-Wesley (1996).
[4] P. van de Kamp: Elements of Astromechanics, San Francisco: W. H.
Freeman and Company (1964).
[5] F. R. Moulton: An Introduction to Celestial Mechanics, New York:
MacMillan (1914).
[6] E. M. Standish: “Orientation of the JPL Ephemerides, DE200/LE200,
to the Dynamical Equinox of J2000”, Astron. Astrophys. 114, 297-302
(1982).
[7] M. Chapront-Touzé, J. Chapront: “The lunar ephemeris ELP-2000”,
Astron. Astrophys. 124, 50-62 (1983).
[8] http://www.navipedia.net/index.php/Transformation between
Celestial and Terrestrial Frames; ESA Navipedia (2014).
[9] http://www.neoprogrammics.com/vsop87/; PHP Science Labs (2015).
[10] http://www.planetarioroma.it/il museo/planetario; Nuovo Planetario di Roma (2006)
[11] http://www.midnightkite.com/index.aspx?URL=Software; MidnightKite Project, D. Bruton (2015).
[12] http://nightshadesoftware.org; Nightshade (2014).
[13] http://www.digitaliseducation.com/products-nightshade.html;
Digitalis Education Solutions, Inc. (2015).
[14] Nightshade 11 User Guide;
Nightshade User Documentation,
http://nightshadesoftware.org/documents/1, Community Edition
(2012).
99
100
BIBLIOGRAFIA
[15] Creating Scripts for Nightshade; Nightshade Technical Documentation,
http://nightshadesoftware.org/documents/3 (2012).
[16] R. Spearman: StratoScript 11.12.1 Command Reference; Nightshade
Technical Documentation,
http://nightshadesoftware.org/documents/2 (2012).
[17] Portable Planetarium Handbook ; International Planetarium Society Inc.,
http://www.ips-planetarium.org/, Susan Reynolds Button editore
(2002).
[18] Rosenfield, P. et al.:“The University of Washington Mobile Planetarium:
A Do-it-yourself Guide”, CAPjournal 15, 35-39 (2014).
[19] http://www.paulbourke.net; P. Bourke (2015).
[20] http://www.lss-planetariums.info/; LSS Group, Y. Lhoumeau & L.
Ruiz (2014).
[21] http://cds.cern.ch/journal/CERNBulletin/2011/41/News%
20Articles/1387908; CERN Bulletin, Edizione No. 41-42 (2011).
Appendice A
Trattazione analitica del problema
dei due corpi
A.1
Equazioni del moto
Si considerino due corpi sferici e omogenei di massa m1 e m2 rispettivamente, che
si attraggono con una forza proporzionale al prodotto delle loro masse e che varia
inversamente al quadrato della distanza tra i loro centri, nel caso della legge di
gravitazione universale di Newton:
F =−G
m1 m2
m1 m2
2
r̂
:=
−
k
r̂,
r2
r2
dove G è la costante di gravitazione universale, r la distanza fra i due corpi e r̂ il
versore di direzione. Si scelga un opportuno sistema di riferimento in cui le coordinate dei due corpi siano (ξ1 , η1 , ζ1 ) e (ξ2 , η2 , ζ2 ) e sia r la distanza tra i due;
combinando le leggi del moto con la gravitazione universale si ottengono allora le
seguenti equazioni differenziali per le coordinate:
ξ1 − ξ2
m1 ξ¨1 = − k 2 m1 m2
;
3
r
η1 − η2
m1 η¨1 = − k 2 m1 m2
;
3
r
ζ1 − ζ2
;
m1 ζ¨1 = − k 2 m1 m2
r3
(A.1)
ξ2 − ξ1
m2 ξ¨2 = − k 2 m2 m1
;
r3
η2 − η1
m2 η¨2 = − k 2 m2 m1
;
r3
m2 ζ¨2 = − k 2 m2 m1 ζ2 − ζ1 .
r3
Per poter risolvere questo sistema di sei equazioni del secondo ordine, si devono
trovare dodici integrali ognuno dei quali introdurrà una costante di integrazione arbitraria. Le costanti possono essere sempre determinate se sono note le tre coordinate
101
102
A. Trattazione analitica del problema dei due corpi
iniziali e le tre componenti della velocità iniziale di ciascuno dei due corpi.
A.2
Il moto del centro di massa
Sommando a due a due le equazioni per ciascuna coordinata del sistema (A.1), si
trova:
m1 ξ¨1 + m2 ξ¨2 = 0;
m1 η¨1 + m2 η¨2 = 0;
(A.2)
m1 ζ¨1 + m2 ζ¨2 = 0.
Queste equazioni sono immediatamente integrabili e danno:
m1 ξ˙1 + m2 ξ˙2 = α1 ;
m1 η˙1 + m2 η˙2 = β1 ;
(A.3)
m1 ζ˙1 + m2 ζ˙2 = γ1 .
E integrando di nuovo:
(A.4)
m1 ξ1 + m2 ξ2 = α1 t + α2 ;
m1 η1 + m2 η2 = β1 t + β2 ;
m ζ +m ζ =γ t+γ .
1 1
2 2
1
2
In questo modo si risolvono sei dei dodici integrali, essendo α1 , α2 , β1 , β2 , γ1 , γ2 le
¯ η̄, ζ̄) del centro
costanti arbitrarie. Si introducano a questo punto le coordinate (ξ,
di massa con M = m1 + m2 , per il quale il sistema (A.4) diventa:
M ξ¯ = m1 ξ1 + m2 ξ2 = α1 t + α2 ;
M η̄ = m1 η1 + m2 η2 = β1 t + β2 ;
(A.5)
M ζ̄ = m ζ + m ζ = γ t + γ .
1 1
2 2
1
2
Da queste equazioni si evince che le coordinate aumentano in maniera lineare col
tempo e, quindi, il centro di massa si muove con velocità costante. Si può dimostrare,
in effetti, che il suo moto sia rettilineo uniforme.
A.3
Le equazioni del moto relativo
Si prenda ora un nuovo sistema di assi cartesiani paralleli ai precedenti, con il centro
delle coordinate nel centro di massa del sistema in esame. Siano (x1 , y1 , z1 ) e (x2 ,
y2 , z2 ) le coordinate di m1 e m2 riferite al nuovo sistema di riferimento; rispetto alle
A.3 Le equazioni del moto relativo
103
vecchie coordinate si scrivono come:
¯ x2 = ξ2 − ξ;
¯
x1 = ξ1 − ξ,
y1 = η1 − η̄, y2 = η2 − η̄;
(A.6)
z = ζ − ζ̄, z = ζ − ζ̄.
1
1
2
2
Sostituendo nel sistema (A.1), le equazioni differenziali del moto nelle nuove variabili
diventano:
x1 − x2
m1 x¨1 = −k 2 m1 m2
;
r3
y1 − y2
m1 y¨1 = −k 2 m1 m2
;
r3
z1 − z2
;
m1 z¨1 = −k 2 m1 m2
r3
(A.7)
x2 − x1
;
m2 x¨2 = −k 2 m2 m1
r3
y2 − y1
m2 y¨2 = −k 2 m2 m1
;
3
r
z − z1
m2 z¨2 = −k 2 m2 m1 2
,
r3
che sono della stessa forma di quelle del moto assoluto. A partire dalla definizione
delle coordinate data in (A.5) e conoscendo sia le posizioni x1 , y1 ,..., z2 sia le costanti
α1 , α2 , β1 , β2 , γ1 , γ2 , si potrebbe risalire alla posizioni assolute nello spazio. Ma
poiché non c’è modo di determinare le costanti a priori, si può solo risolvere il
problema del moto relativo espresso dalle (A.7)
Dal momento che la nuova origine del sistema di riferimento è nel centro di massa,
sussistono le seguenti relazioni tra coordinate:
m1 x1 + m2 x2 = 0;
m1 y1 + m2 y2 = 0;
(A.8)
m z + m z = 0,
1 1
2 2
dalle quali è possibile ricavare le coordinate di uno dei due corpi, quando sono note
le coordinate dell’altro rispetto al centro di massa.
Le equazioni (A.8) possono essere utilizzate per eliminare le variabili x2 , y2 e z2
dalle prime tre equazioni del sistema (A.7), e x1 , y1 e z1 dalle altre tre. Si ha come
104
A. Trattazione analitica del problema dei due corpi
risultato:
x1
x¨1 = −k 2 M 3 ;
r
y1
2
y¨1 = −k M 3 ;
r
z
1
2
z¨1 = −k M 3 ;
r
x2
2
x
¨
2 = −k M 3 ;
r
y
2
y¨2 = −k 2 M 3 ;
r
z¨2 = −k 2 M z2 .
r3
(A.9)
Le equazioni in x1 , y1 , z1 sono ora indipendenti da x2 , y2 , z2 e viceversa. Ma ciò che
risulterebbe più utile studiare è il moto di un corpo rispetto all’altro. Allo scopo
basta scrivere le coordinate (x, y, z) relative a m2 rispetto a m1 :
x = x2 − x1 ,
y = y2 − y1 ,
z = z2 − z1 .
Sottraendo dunque in (A.9) le equazioni delle coordinate di m1 alle equazioni di m2 ,
e sostituendo le coordinate relative appena scritte, ne risulta:
x
ẍ = −k 2 M 3 ;
r
y
ÿ = −k 2 M 3 ;
(A.10)
r
z̈ = −k 2 M z .
r3
Il problema è stato cosı̀ ridotto dal dodicesimo al sesto ordine per mezzo degli integrali (A.3) e (A.4). Integrando le equazioni (A.10) si introducono altre sei costanti
che possono essere determinate a partire dalle tre coordinate iniziali e dalle tre
proiezioni della velocità di m1 rispetto a m2 .
Moltiplicando per le opportune variabili e sottraendo a due a due le equazioni
(A.10) si ottiene il sistema:
xÿ − yẍ = 0;
yz̈ − z ÿ = 0;
(A.11)
z ẍ − xz̈ = 0,
i cui integrali sono:
(A.12)
xẏ − y ẋ = a1 ;
y ż − z ẏ = a2 ;
z ẋ − xż = a .
3
A.3 Le equazioni del moto relativo
105
z
A
O
y
Ω
L
i
x
Figura A.1: Sistema di riferimento in cui l’oggetto si sposta da L ad A su un’orbita
inclinata di un angolo i.
Si può dimostrare che le costanti a1 , a2 e a3 sono legate alle proiezioni della velocità
areolare1 sui piani xy, yz e zx rispettivamente. Infatti:
1
Ȧ = (xẏ − y ẋ)
2
in coordinate rettangolari.
Moltiplicando ora le equazioni (A.12) per z, x e y rispettivamente e poi sommando, si ottiene:
(A.13)
a1 z + a2 x + a3 y = 0,
ovvero l’equazione di un piano passante per l’origine soddisfatta dalle coordinate di
m1 ; si è cosı̀ dimostrato che il moto di un corpo rispetto all’altro giace su un piano
che passa per il centro di quest’ultimo.
Le costanti a1 , a2 e a3 individuano la posizione del piano dell’orbita rispetto agli
assi di riferimento. In coordinate polari l’equazione (A.13) diventa:
(A.14)
a1 sin ϕ + a2 cos ϕ cos θ + a3 cos ϕ sin θ = 0,
con ϕ e θ angoli polari sui piani xz e xy rispettivamente. Il piano xy e il piano
dell’orbita si intersecano lungo una retta che passa per L (fig. A.1). Si consideri
il segmento OL, passante per il punto in cui l’oggetto m1 passa dal lato negativo
del piano xy a quello positivo (analogo del nodo ascendente). Sia Ω l’angolo tra
la direzione positiva dell’asse delle x e il segmento OL, preso positivo a partire da
Ox; questo angolo varia tra 0 e 360. Sia poi i l’inclinazione tra i due piani, positivo
1
Velocità con cui una superficie viene spazzata dal raggio vettore di un oggetto che si muove
lungo l’orbita.
106
A. Trattazione analitica del problema dei due corpi
nella direzione di rotazione intorno a OL; l’angolo d’inclinazione può assumere tutti
i valori tra 0 e 180 e sarà maggiore (minore) di 90 quando a1 è positivo (negativo).
Quando ϕ = 0 il valore di θ è Ω o Ω + π, posizioni che corrispondono al punto L e
al suo opposto rispetto a O sulla retta OL; quando θ = Ω + π2 l’angolo ϕ può essere
pari a i o π − i, laddove i sia minore o maggiore di 90 rispettivamente. A questi
ultimi casi corrispondono rispettivamente le seguenti equazioni:
(
a2 cos Ω + a3 sin Ω = 0;
(A.15)
a1 sin i ∓ a2 cos i sin Ω ± a3 cos i cos Ω = 0,
dove nella seconda equazione il segno superiore vale per i < 90 e il segno inferiore
per i > 90.
Poiché le proiezioni della velocità areolare sui tre piani fondamentali sono costanti
(dalla (A.12) e dalla definizione di Ȧ si vede che le proiezioni sono pari a 21 a1 , 12 a2
e 12 a3 ), anche la velocità areolare nel piano dell’orbita sarà costante. Sia questa
costante rappresentata dal valore 12 C, con
(A.16)
C=
p
a21 + a22 + a23 ,
nella quale si è scelto il segno positivo della radice quadrata. Mettendo insieme
(A.15) e (A.16), si ricavano le espressioni di a1 , a2 e a3 in funzione di C e degli
angoli i e Ω:
a1 = + C cos i;
a2 = ± C sin i sin Ω;
(A.17)
a = ∓ C sin i cos Ω,
3
dove nella seconda e terza equazione è da prendere il segno superiore quando i <
90 e il segno inferiore quando i > 90, ovvero se a1 è positivo o negativo (dalla
prima delle tre equazioni). Si sono in questo modo ottenute delle semplici relazioni
che definiscono in maniera univoca gli angoli i e Ω, che a loro volta determinano
univocamente la posizione del piano orbitale.
A.4
Il problema nel piano
Dal momento che l’orbita giace su un piano ben determinato, si possono scegliere gli
assi in modo tale che l’ascissa e l’ordinata siano su questo stesso piano. Le equazioni
del moto sono:
x
ẍ = −k 2 M 3 ;
r
(A.18)
y
ÿ = −k 2 M .
r3
Il problema è stato ridotto dal sesto al quarto ordine utilizzando gli integrali (A.12)
e può essere risolto in maniera diretta sviluppando il metodo comunemente usato
A.4 Il problema nel piano
107
in meccanica celeste (vedi, ad esempio, ref. [5]). Mettendo insieme le due equazioni
(A.18) si ottiene:
xÿ − yẍ = 0,
il cui integrale è:
xẏ − y ẋ = c1 ,
che in coordinate polari diventa:
r2 θ̇ = c1 .
(A.19)
Definendo A l’area spazzata dal raggio vettore r, allora sussiste la relazione:
2Ȧ = r2 θ̇ = c1 ,
da cui
(A.20)
2A = c1 t + c2 ,
dalla quale segue che l’area spazzata dal raggio vettore è direttamente proporzionale
al tempo in cui essa viene descritta.
Moltiplicando ora le equazioni (A.18) per 2ẋ e 2ẏ rispettivamente e sommando,
il risultato è:
k2M
2k 2 M
2ẍẋ + 2ÿ ẏ = − 3 (xẋ + y ẏ) = − 3 ṙ.
r
r
L’integrale di questa equazione è
2k 2 M
+ c3 ,
r
ẋ2 + ẏ 2 =
(A.21)
che in coordinate polari si scrive:
ṙ2 + r2 θ̇2 =
(A.22)
2k 2 M
+ c3 .
r
Ma poiché
ṙ =
allora
θ̇
2
dr
dθ
2
dr
θ̇
dθ
+r
2
=
2k 2 M
+ c3 ,
r
A questo punto, utilizzando la (A.19) si può scrivere:
c1 dr
dθ = p
,
r −c21 + 2k 2 M r + c3 r2
108
A. Trattazione analitica del problema dei due corpi
o analogamente:
(A.23)
dθ = r
c3 +
−d
k4 M 2
c21
−
c1
r
k2 M
c1
−
c1
r
2 .
L’equazione è ora scritta nella forma
dθ = √
−dg
f 2 − g2
il cui integrale è
g
θ = arccos
+ c4 .
f
Ritornando alle variabili vere:
(A.24)
r=
c1
k2 M
c1
q
− c3 +
k4 M 2
c21
,
cos(θ − c4 )
equazione che rappresenta una sezione conica con l’origine in uno dei fuochi, scritta
in forma polare (vedi [5]).
A.5
Gli elementi orbitali in funzione delle costanti
d’integrazione
L’inclinazione i e la longitudine del nodo Ω sono legate alle costanti di integrazione
attraverso le (A.17); per gli altri parametri si può derivare una qualche formula a
partire dalla (A.24). Basta confrontare, infatti, questa espressione con l’equazione
generica di una sezione conica con l’origine nel fuoco di destra dell’ellisse:
r(θ) =
p
,
1 + e cos(θ − ω)
dove ω è l’angolo tra l’asse polare e l’asse maggiore dell’ellisse e p è il semilato retto
definito da:
b2
p=
a
A.5 Gli elementi orbitali in funzione delle costanti d’integrazione
109
in cui a e b indicano gli assi maggiore e minore rispettivamente. Per confronto si
ricavano le seguenti espressioni:
c21
;
p
=
k2M
c21 c3
2
e
=
1
+
;
4
2
k
M
(A.25)
ω = c4 − π;
p
c
=
k
M p;
1
k 2 (1 − e2 )
M.
c3 = −
p
Se si indica con A0 l’area descritta nel momento in cui il corpo celeste passa al
perielio2 , allora dalla (A.20) segue che:
(A.26)
T =
2A0 − c2
,
c1
dove T è il tempo del passaggio al perielio.
2
Nel caso in cui m1 sia il Sole, il periapside prende il nome di perielio.
Appendice B
Guida ai comandi di NL
Tabella B.1: Tasti di interfaccia grafica
Funzione
Tasto
Descrizione
Linee delle
costellazioni
C
Disegna le linee delle costellazioni
Etichette delle
costellazioni
V
Mostra i nomi delle costellazioni
Mitologia delle
costellazioni
R
Sovrappone alle stelle rappresentazioni artistiche delle costellazioni
Griglia azimutale
--
Disegna la griglia di coordinate
altazimutali
Griglia equatoriale
E
Disegna la griglia di coordinate
equatoriali
Terreno
G
Mostra il terreno
Punti cardinali
Q
Mostra i punti cardinali sull’orizzonte
Atmosfera
A
Mostra gli effetti dell’atmosfera
Etichette dei
corpi celesti
P
Mostra i nomi di pianeti, satelliti
e pianeti nani
Etichette delle
nebulose
N
Segna le posizioni di nebulose e
galassie quando il campo di vista
è troppo largo per vederle
Montatura
azimutale/equatoriale
U
Passa dal sistema di coordinate
altazimutali a quelle equatoriali
SPACE
Centra la schermata sull’oggetto
selezionato
CTRL+F
Mostra la finestra per la ricerca di
oggetti
Segue l’oggetto
selezionato
Ricerca di un oggetto
111
Icona
112
B. Guida ai comandi di NL
Configurazione
1
Mostra il menu di configurazione
Aiuto
H
Mostra la finestra di aiuto
Esci
CTRL+Q
Chiude il programma
Riduce velocità
del tempo
J
Fa scorrere indietro il tempo o rallenta l’avanzamento. Può essere
premuto più volte per aumentare
il rate
Avanzamento del
tempo reale
K
Passa allo scorrere del tempo
reale
Aumenta velocità
del tempo
L
Accelera l’avanzamento o rallenta
lo scorrimento indietro del tempo.
Può essere premuto più volte per
aumentare il rate
Torna all’ora attuale
8
Passa all’ora attuale
Tabella B.2: Comandi di spostamento e selezione
TASTI FRECCE
CTRL + FRECCIA SU
CTRL + FRECCIA GIÙ
CLICK SINISTRO
CLICK DESTRO
/
\
SPAZIO
Sposta vista
Zoom avanti (manuale)
Zoom indietro (manuale)
Selezione l’oggetto
Deselezione l’oggetto
Zoom avanti (automatico)
Zoom indietro (automatico)
Centra nell’oggetto selezionato
113
Tabella B.3: Opzioni di visualizzazione
U
F11
C
V
B
R
E
Z
N
P
D
S
G
A
F
Q
O
4 oppure ,
5 oppure .
X
Montatura altazimutale/equatoriale
Visualizzazione a schermo intero (se possibile)
Linee delle costellazioni
Nomi delle costellazioni
Confini delle costellazioni
Rappresentazione artistica delle costellazioni
Griglia equatoriale
Meridiano celeste
Nomi delle galassie
Nomi dei pianeti
Nomi delle stelle
Stelle
Terreno
Atmosfera
Nebbia
Punti cardinali
Commuta le dimensioni della Luna
Linea dell’eclittica
Linea dell’equatore celeste
Commuta la visualizzazione di data e ora e delle
informazioni sull’oggetto selezionato
Tabella B.4: Menu e altre funzioni
H
I
M
1
CTRL + S
CTRL + R
CTRL + F
CTRL + G
CTRL + SHIFT + V
Aiuto
Informazioni sul programma
Menu testuale
Configurazione
Cattura una schermata
Registrazione script
Ricerca di un oggetto
Vai sull’oggetto selezionato
Commuta la frequenza dei fotogrammi video
114
B. Guida ai comandi di NL
Tabella B.5: Tempo e date
6
7
8
J
K
L
=
[
]
Mette in pausa
Arresta il tempo
Torna all’ora attuale
Riduce la velocità del tempo
Avanzamento tempo reale
Aumenta la velocità del tempo
Arretra 24 ore
Avanza 24 ore
Arretra 7 giorni
Avanza 7 giorni
Tabella B.6: Funzioni attivate a seguito del tasto ‘ (backtick)
P
Z
8
K
5
A
Orbite dei corpi
Griglia altazimutale
Carica la configurazione predefinita
Riproduce l’ultimo script
Linee dei tropici
Nuvole (ove previste)
Tabella B.7: Durante la riproduzione di script
6
7
K
L
CTRL + C
Mette in pausa lo script
Arresta lo script
Riprende lo script
Accelera la riproduzione
Termina lo script
Tabella B.8: Varie altre funzioni
CTRL + D
CTRL + 9
CTRL + Q
Avvia lo script demo
Intensità sciami meteorici
Esce dal programma
Appendice C
Subroutine VSOP87
La soluzione VSOP87 esprime le coordinate di un oggetto in funzione del tempo in
due forme diverse: serie periodiche e serie di Poisson. Questa subroutine, scritta
in Fortran 77, sostituisce il tempo t in ambedue le serie e scrive i risultati in file
di output, uno per ciascun pianeta e per ciascuna delle sei versioni del modello, a
seconda del sistema di coordinate.
subroutine VSOP87 (tdj,ivers,ibody,prec,lu,r,ierr)
*------------------------------------------------------------------*
*
Reference : Bureau des Longitudes - PBGF9502
*
*
Object :
*
*
Substitution of time in VSOP87 solution written on a file.
*
The file corresponds to a version of VSOP87 theory and to
*
a body.
*
*
Input :
*
*
tdj
julian date (real double precision).
*
time scale : dynamical time TDB.
*
*
ivers
version index (integer).
*
0: VSOP87 (initial solution).
*
elliptic coordinates
*
dynamical equinox and ecliptic J2000.
*
1: VSOP87A.
*
rectangular coordinates
*
heliocentric positions and velocities
*
dynamical equinox and ecliptic J2000.
*
2: VSOP87A.
*
spherical coordinates
*
heliocentric positions and velocities
115
116
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
C. Subroutine VSOP87
dynamical equinox and ecliptic J2000.
3: VSOP87C.
rectangular coordinates
heliocentric positions and velocities
dynamical equinox and ecliptic of the date.
4: VSOP87D.
spherical coordinates
heliocentric positions and velocities
dynamical equinox and ecliptic of the date.
5: VSOP87E.
rectangular coordinates
barycentric positions and velocities
dynamical equinox and ecliptic J2000.
ibody
body index (integer).
0: Sun
1: Mercury
2: Venus
3: Earth
4: Mars
5: Jupiter
6: Saturn
7: Uranus
8: Neptune
9: Earth-Moon barycenter
prec
relative precision (real double precision).
if prec is equal to 0 then the precision is the
precision p0 of the complete solution VSOP87.
Mercury
p0 = 0.6 10**-8
Venus
p0 = 2.5 10**-8
Earth
p0 = 2.5 10**-8
Mars
p0 = 10.0 10**-8
Jupiter
p0 = 35.0 10**-8
Saturn
p0 = 70.0 10**-8
Uranus
p0 = 8.0 10**-8
Neptune
p0 = 42.0 10**-8
if prec is not equal to 0, let us say in between p0
and 10**-2, the precision is :
for the positions :
- prec*a0 au for the distances.
- prec rd for the other variables.
for the velocities :
- prec*a0 au/day for the distances.
117
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
- prec rd/day for the other variables.
a0 is semi-major axis of the body.
Mercury
a0 = 0.3871 ua
Venus
a0 = 0.7233 ua
Earth
a0 = 1.0000 ua
Mars
a0 = 1.5237 ua
Jupiter
a0 = 5.2026 ua
Saturn
a0 = 9.5547 ua
Uranus
a0 = 19.2181 ua
Neptune
a0 = 30.1096 ua
lu
logical unit index of the file (integer).
The file corresponds to a version of VSOP87 theory
and a body, and it must be defined and opened
before the first call to subroutine VSOP87.
Output :
r(6)
array of the results (real double precision).
for elliptic coordinates :
1: semi-major axis (au)
2: mean longitude (rd)
3: k = e*cos(pi) (rd)
4: h = e*sin(pi) (rd)
5: q = sin(i/2)*cos(omega) (rd)
6: p = sin(i/2)*sin(omega) (rd)
e:
eccentricity
pi:
perihelion longitude
i:
inclination
omega: ascending node longitude
for rectangular
1: position
2: position
3: position
4: velocity
5: velocity
6: velocity
coordinates :
x (au)
y (au)
z (au)
x (au/day)
y (au/day)
z (au/day)
for spherical coordinates :
1: longitude (rd)
2: latitude (rd)
3: radius (au)
4: longitude velocity (rd/day)
5: latitude velocity (rd/day)
118
C. Subroutine VSOP87
*
6: radius velocity (au/day)
*
*
ierr
error index (integer).
*
0: no error.
*
1: file error (check up ivers index).
*
2: file error (check up ibody index).
*
3: precision error (check up prec parameter).
*
4: reading file error.
*
*------------------------------------------------------------------*
*
-------------------------------*
Declarations and initializations
*
-------------------------------*
implicit double precision (a-h,o-z)
character*7 bo,body(0:9)
dimension r(6),t(-1:5),a0(0:9)
data body/’SUN’,’MERCURY’,’VENUS’,’EARTH’,’MARS’,’JUPITER’,
.
’SATURN’,’URANUS’,’NEPTUNE’,’EMB’/
data a0/0.01d0,0.3871d0,0.7233d0,1.d0,1.5237d0,5.2026d0,
.
9.5547d0,19.2181d0,30.1096d0,1.d0/
data dpi/6.283185307179586d0/
data t/0.d0,1.d0,5*0.d0/
data t2000/2451545.d0/
data a1000/365250.d0/
k=0
ideb=0
*
rewind (lu,err=500)
do i=1,6
r(i)=0.d0
enddo
*
t(1)=(tdj-t2000)/a1000
do i=2,5
t(i)=t(1)*t(i-1)
enddo
*
ierr=3
if (prec.lt.0.d0.or.prec.gt.1.d-2) return
q=dmax1(3.d0,-dlog10(prec+1.d-50))
*
*
------------------------------------*
File reading and substitution of time
*
-------------------------------------
119
*
100
continue
read (lu,1001,end=400,err=500) iv,bo,ic,it,in
*
if (ideb.eq.0) then
ideb=1
ierr=1
if (iv.ne.ivers) return
ierr=2
if (bo.ne.body(ibody)) return
ierr=0
if (iv.eq.0) k=2
if (iv.eq.2.or.iv.eq.4) k=1
endif
*
if (in.eq.0) goto 100
*
p=prec/10.d0/(q-2)/(dabs(t(it))+it*dabs(t(it-1))*1.d-4+1.d-50)
if (k.eq.0.or.(k.ne.0.and.ic.eq.5-2*k)) p=p*a0(ibody)
*
200
*
300
*
do 200 n=1,in
nn=n
read (lu,1002,err=500) a,b,c
if (dabs(a).lt.p) goto 300
u=b+c*t(1)
cu=dcos(u)
r(ic)=r(ic)+a*cu*t(it)
if (iv.eq.0) goto 200
su=dsin(u)
r(ic+3)=r(ic+3)+t(it-1)*it*a*cu-t(it)*a*c*su
continue
goto 100
continue
if (nn.eq.in) goto 100
*
do n=nn+1,in
read (lu,1002,err=500)
enddo
goto 100
*
400
continue
if (iv.ne.0) then
do i=4,6
r(i)=r(i)/a1000
120
C. Subroutine VSOP87
enddo
endif
*
if (k.eq.0) return
*
r(k)=dmod(r(k),dpi)
if (r(k).lt.0.d0) r(k)=r(k)+dpi
return
*
500
*
*
*
*
*
1001
1002
*
continue
ierr=4
return
------Formats
------format (17x,i1,4x,a7,12x,i1,17x,i1,i7)
format (79x,f18.11,f14.11,f20.11)
end
Il seguente è un esempio di programma che fa uso della subroutine di calcolo.
Calcola le coordinate di un pianeta per una delle sei versioni VSOP87.
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
----------------PROGRAMME EXAMPLE
----------------Reference : Bureau des Longitudes - PBGF9502.
-----Object
-----This program is an example of use of VSOP87 subroutine.
It computes the coordinates of a planet for a version of VSOP87.
VSOP87 (main version) : elliptic coordinates J2000
VSOP87A : heliocentric rectangular coordinates J2000
VSOP87B : heliocentric spherical
coordinates J2000
VSOP87C : heliocentric rectangular coordinates of date
VSOP87D : heliocentric spherical
coordinates of date
VSOP87E : barycentric rectangular coordinates J2000
The frame is referred to the dynamical equinox and ecliptic.
121
*
*
*
*
*
*
The time scale is the dynamical barycentric time TDB.
-----------Declarations
-----------implicit double precision (a-h,o-z)
logical fexist
integer day,month,year,d0,h0,dt,datmod
character rep,a(0:5)
character*4 ext(0:9)
character*6 prefix
character*7 vers
character*21 body(0:9)
character*40 fich
character*37 coord(4)
character*39 reper(2)
dimension r(6),kbody(0:8,0:5),maxbody(0:5),prec0(0:9)
data a/’ ’,’A’,’B’,’C’,’D’,’E’/
data ext/’.sun’,’.mer’,’.ven’,’.ear’,’.mar’,’.jup’,
.
’.sat’,’.ura’,’.nep’,’.emb’/
data body/’SUN’,’MERCURY’,’VENUS’,’EARTH’,’MARS’,’JUPITER’,
.
’SATURN’,’URANUS’,’NEPTUNE’,’EARTH-MOON BARYCENTER’/
data coord/’Heliocentric elliptic coordinates.’,
.
’Heliocentric rectangular coordinates.’,
.
’Heliocentric spherical coordinates.’,
.
’Barycentric rectangular coordinates.’/
data reper/’Dynamical equinox and ecliptic J2000.’,
.
’Dynamical equinox and ecliptic of date.’/
data prec0/1.d-8,0.6d-8,2.5d-8,2.5d-8,10.d-8,35.d-8,70.d-8,
.
8.d-8,42.d-8,2.5d-8/
data kbody/1,2,4,5,6,7,8,9,10,
.
1,2,3,4,5,6,7,8,9,
.
1,2,3,4,5,6,7,8,10,
.
1,2,3,4,5,6,7,8,10,
.
1,2,3,4,5,6,7,8,10,
.
0,1,2,3,4,5,6,7,8/
data maxbody/7,8,7,7,7,8/
data prefix/’VSOP87’/
menu=4
lu0=0
*
*
*
*
*
---------------Version and body
----------------
122
100
*
*
*
*
*
C. Subroutine VSOP87
continue
if (menu.ne.1.and.menu.ne.4) goto 200
call CLRSCR
print 1000
print 2001
read (*,3001,iostat=nerr) ivers
if (nerr.ne.0) goto 100
if (ivers.lt.0.or.ivers.gt.5) goto 100
vers=’VSOP87’//a(ivers)
call CLRSCR
print 1000
print 2002, vers
do i=0,maxbody(ivers)
nbody=kbody(i,ivers)
print 2003, nbody,body(nbody)
enddo
print 2004
read (*,3004,iostat=nerr) ibody
if (nerr.ne.0) goto 100
irep=0
do i=0,maxbody(ivers)
if (kbody(i,ivers).eq.ibody) irep=1
enddo
if (irep.eq.0) goto 100
print 1001
read 3000, rep
if (rep.eq.’N’.or.rep.eq.’n’) goto 100
---------------Open file VSOP87
---------------lu=ivers*10+10+ibody
if (lu0.ne.0.and.lu0.ne.lu) close (lu0)
if (ivers.eq.0) fich=prefix//ext(ibody)
if (ivers.ne.0) fich=prefix//a(ivers)//ext(ibody)
inquire (file=fich,exist=fexist)
if (fexist) then
if (lu.ne.lu0) then
open (lu,file=fich,status=’old’,iostat=nerr)
if (nerr.ne.0) goto 610
lu0=lu
endif
else
goto 620
endif
123
*
*
*
*
*
200
*
*
*
------------Datation mode
------------continue
if (menu.ne.2.and.menu.ne.4) goto 300
call CLRSCR
print 1000
print 2005
read (*,3005,iostat=nerr) datmod
if (nerr.ne.0) goto 200
if (datmod.lt.1.or.datmod.gt.2) goto 200
if (datmod.eq.1) then
print 2006
read (*,3006,iostat=nerr) t0
if (nerr.ne.0) goto 200
if (t0.lt.1.d0) goto 200
else
print 2007
read (*,3007,iostat=nerr) d0
if (nerr.ne.0) goto 200
call DATEJD (d0,0,td)
if (td.eq.0.d0) goto 200
print 2008
read (*,3008,iostat=nerr) h0
if (nerr.ne.0) goto 200
call DATEJD (d0,h0,t0)
if (t0.eq.0.d0) goto 200
endif
t=t0
print 2009
read (*,3009,iostat=nerr) dt
if (nerr.ne.0.or.dt.lt.0) goto 200
nj=dt/1000000
nh=mod(dt,1000000)/10000
nm=mod(dt,10000)/100
ns=mod(dt,100)
if (nj.gt.100.or.nh.gt.24.or.nm.gt.60.or.ns.gt.60) goto 200
pas=nj+nh/24.d0+nm/1440.d0+ns/86400.d0
print 1001
read 3000, rep
if (rep.eq.’N’.or.rep.eq.’n’) goto 200
-------------------------Precision level (relative)
124
*
*
300
*
*
*
*
*
400
C. Subroutine VSOP87
-------------------------continue
if (menu.ne.3.and.menu.ne.4) goto 400
call CLRSCR
print 1000
print 2010
read (*,3010,iostat=nerr) iprec
if (nerr.ne.0) goto 300
if (iprec.lt.1.or.iprec.gt.2) goto 300
if (iprec.eq.1) then
prec=0.d0
else
print 2011, prec0(ibody)
read (*,3011,iostat=nerr) prec
if (nerr.ne.0) goto 300
if (prec.lt.prec0(ibody).or.prec.gt.1.d-2) goto 300
print 1001
read 3000, rep
if (rep.eq.’N’.or.rep.eq.’n’) goto 300
endif
---------------------------Computation of the ephemeris
---------------------------continue
print 2012
*
call VSOP87 (t,ivers,ibody,prec,lu,r,ierr)
*
if (ierr.ne.0) goto 600
call JDDATE (t,idate,iheur)
jdate=abs(idate)
day=mod(jdate,100)
month=mod(jdate/100,100)
year=idate/10000
nh=iheur/10000
nm=mod(iheur/100,100)
ns=mod(iheur,100)
ic=1
ir=1
if (ivers.eq.1.or.ivers.eq.3) ic=2
if (ivers.eq.2.or.ivers.eq.4) ic=3
if (ivers.eq.5) ic=4
if (ivers.eq.3.or.ivers.eq.4) ir=2
125
*
410
*
*
*
*
*
500
*
*
*
*
*
600
continue
call CLRSCR
if (prec.lt.prec0(ibody)) then
print 4001, vers,body(ibody),coord(ic),reper(ir),
.
day,month,year,t,nh,nm,ns
else
print 4002, vers,body(ibody),coord(ic),reper(ir),
.
day,month,year,t,nh,nm,ns,prec
endif
if (ivers.eq.0) print 4003,r
if (ivers.eq.1.or.ivers.eq.3.or.ivers.eq.5)
.
print 4004, r(1),r(4),r(2),r(5),r(3),r(6)
if (ivers.eq.2.or.ivers.eq.4)
.
print 4005, r(1),r(4),r(2),r(5),r(3),r(6)
print 2013
read 3000, rep
if (rep.ne.’+’.and.rep.ne.’-’) goto 500
if (dt.eq.0) goto 410
if (rep.eq.’+’) t=t+pas
if (rep.eq.’-’) t=t-pas
goto 400
------------------Another computation
------------------continue
call CLRSCR
print 1000
print 2014
read (*,3014,iostat=nerr) menu
if (nerr.ne.0) goto 500
if (menu.lt.0.or.menu.gt.4) goto 500
if (menu.ne.0) goto 100
call CLRSCR
print 1000
print 2015
pause ’ Program terminated : Hit Enter’
stop
--------------Errors Messages
--------------continue
126
610
620
*
*
*
*
*
1000
C. Subroutine VSOP87
call CLRSCR
print 1000
if (ierr.eq.1) print 5001,
if (ierr.eq.2) print 5002,
if (ierr.eq.3) print 5003,
if (ierr.eq.4) print 5004,
pause ’ Program terminated
stop
continue
call CLRSCR
print 1000
print 5005, fich
pause ’ Program terminated
stop
continue
call CLRSCR
print 1000
print 5006, fich
pause ’ Program terminated
stop
ivers
ibody
prec
fich
: Hit Enter’
: Hit Enter’
: Hit Enter’
------Formats
-------
format (2x,’PLANETARY SOLUTION VSOP87’/
.
2x,’-------------------------’)
1001 format (/2x,’Confirm your choice (y/n) ? ’,$)
*
2001 format (/2x,’Choice of the version’/
.
/2x,’0 : VSOP87 (main solution), elliptic coordinates’
.
/2x,’
dynamical equinox and ecliptic J2000’/
.
/2x,’1 : VSOP87A, heliocentric rectangular coordinates’
.
/2x,’
dynamical equinox and ecliptic J2000’/
.
/2x,’2 : VSOP87B, heliocentric spherical coordinates’
.
/2x,’
dynamical equinox and ecliptic J2000’/
.
/2x,’3 : VSOP87C, heliocentric rectangular coordinates’
.
/2x,’
dynamical equinox and ecliptic of the date’/
.
/2x,’4 : VSOP87D, heliocentric spherical coordinates’
.
/2x,’
dynamical equinox and ecliptic of the date’/
.
/2x,’5 : VSOP87E, barycentric rectangular coordinates’
.
/2x,’
dynamical equinox and ecliptic J2000’/
.
/2x,’Enter your choice ? ’,$)
2002 format (/2x,’Choice of the body in version ’,a7/)
2003 format (2x,i1,’ : ’,a21)
2004 format (/2x,’Enter your choice ? ’,$)
127
2005
2006
2007
2008
2009
2010
2011
2012
2013
2014
2015
*
3000
3001
3004
3005
3006
3007
3008
3009
3010
3011
3014
*
4001
format
.
.
.
format
.
format
.
format
.
format
.
format
.
.
.
format
.
.
format
format
.
.
format
.
.
.
.
.
.
format
format
format
format
format
format
format
format
format
format
format
format
(/2x,’Datation mode’/
/2x,’1 : computation with julian dates’
/2x,’2 : computation with calendar dates’/
/2x,’Enter your choice ? ’,$)
(/2x,’Enter the initial julian date’
/2x,’don’’t forget the decimal point ---> ’,$)
(/2x,’Enter the initial date’
/2x,’format : +/-yyyymmdd -------------> ’,$)
(/2x,’Enter the initial time’
/2x,’format : hhmmss ------------------> ’,$)
(/2x,’Enter the time step (<100 days)’
/2x,’format : ddhhmmss ----------------> ’,$)
(/2x,’Precision level’/
/2x,’1 : computation with the complete solution’
/2x,’2 : computation with a truncated solution’/
/2x,’Enter your choice ? ’,$)
(/2x,’Enter the relative precision level’
/2x,’between ’,f11.9,’ and 0.01’
/2x,’don’’t forget the decimal point -----> ’,$)
(/2x,’Wait Please . . .’)
(/2x,77(’-’)//2x,’Choice of time :
next time -> +’,
’
previous time -> stop -> 0’/
/2x,’Enter your choice ? ’,$)
(/2x,’Another computation’/
/2x,’0 : stop’/
/2x,’1 : with new version or body’
/2x,’2 : with new datation mode’
/2x,’3 : with new precision level’/
/2x,’4 : with new parameters’/
/2x,’Enter your choice ? ’,$)
(///)
(a)
(i2)
(i2)
(i2)
(f14.6)
(i10)
(i7)
(i9)
(i2)
(f12.9)
(i2)
format (2x,’PLANETARY SOLUTION ’,a7,5x,’BODY : ’,a21
.
/2x,77(’-’)//2x,a37,1x,a39/
128
4002
4003
4004
4005
*
5001
5002
5003
5004
5005
5006
C. Subroutine VSOP87
.
.
.
.
format
.
.
.
.
.
format
.
.
.
.
.
.
.
.
.
format
.
.
format
.
.
.
.
.
/2x,’Date : ’,i2.2,’ / ’,i2.2,’ / ’,i5,
t41,’Julian date : ’,f14.6
/2x,’Time : ’,i2.2,’h ’,i2.2,’m ’,i2.2,’s TDB’,
t41,’Precision of the complete solution’)
(2x,’PLANETARY SOLUTION ’,a7,5x,’BODY : ’,a21
/2x,77(’-’)//2x,a37,1x,a39/
/2x,’Date : ’,i2.2,’ / ’,i2.2,’ / ’,i5,
t41,’Julian date : ’,f14.6
/2x,’Time : ’,i2.2,’h ’,i2.2,’m ’,i2.2,’s TDB’,
t41,’Relative precision : ’,f10.9)
(/2x,’Semi-major axis : ’,f13.10,’ au’,
t41,’Mean longitude :
’,f13.10,’ rad’
/2x,’k = e*cos(p) :
’,f13.10,’ rad’,
t41,’h = e*sin(p) :
’,f13.10,’ rad’
/2x,’q = sin(g)*cos(G) :’,f13.10,’ rad’,
t41,’p = sin(g)*sin(G) :’,f13.10,’ rad’/
/2x,’e : eccentricity’,
t41,’p : perihelion longitude’
/2x,’g : semi-iclination’,
t41,’G : ascending node longitude’)
(/2x,’X :’,f14.10,’ au’,t41,’X’’ :’,f14.10,’ ua/d’
/2x,’Y :’,f14.10,’ au’,t41,’Y’’ :’,f14.10,’ ua/d’
/2x,’Z :’,f14.10,’ au’,t41,’Z’’ :’,f14.10,’ ua/d’)
(/2x,’Longitude :’,f14.10,’ rad’,
t41,’vitesse :’,f14.10,’ rad/d’
/2x,’Latitude : ’,f14.10,’ rad’,
t41,’vitesse :’,f14.10,’ rad/d’
/2x,’Radius :
’,f14.10,’ au’,
t41,’vitesse :’,f14.10,’ au/d’)
format
.
format
.
format
.
format
.
format
.
format
.
(/2x,’***** Error *****’/
/2x,’Wrong version index : ’,i1/)
(/2x,’***** Error *****’/
/2x,’Wrong body index : ’,i1/)
(/2x,’***** Error *****’/
/2x,’Wrong precision level : ’,d9.2/)
(/2x,’***** Error *****’/
/2x,’Fatal reading file error : ’,a40/)
(/2x,’***** Error *****’/
/2x,’Fatal open file error : ’,a40/)
(/2x,’***** File Error *****’/
/2x,’Missing file : ’,a40/)
*
end
Appendice D
Script
#########################
# A SPASSO NELLO SPAZIO #
#########################
date utc 2014-09-18T11:00:00
script action pause
% Si parte!
##ATMOSFERA##
timerate rate 200
wait duration 4
flag atmosphere off
wait duration 4
flag planet_names on
wait duration 8
flag planet_names off
wait duration 3
flag atmosphere on
wait duration 2
% Facciamo sparire
l’atmosfera e
visualizziamo la
posizione dei pianeti
% Via i pianeti
e riaccendiamo
l’atmosfera
##COSTELLAZIONI##
timerate rate 1200
wait duration 18
clear
timerate rate 450
wait duration 9
flag constellation_drawing on
wait duration 7
flag constellation_boundaries on
wait duration 4
flag constellation_drawing off
wait duration 2
% Si fa notte,
approfittiamo per dare
uno sguardo alle
costellazioni...
129
130
flag
wait
flag
wait
flag
D. Script
constellation_names on
duration 3
constellation_drawing on
duration 4
constellation_boundaries off
timerate rate 1
flag show_tui_datetime off
flag
flag
wait
flag
wait
flag
constellation_names off
constellation_art on
duration 1
constellation_drawing off
duration 5
constellation_art off
script action pause
##GRIGLIE COORDINATE##
flag equatorial_grid on
wait duration 5
timerate rate 500
wait duration 10
% Spente le costellazioni,
accendiamo prima la
griglia equatoriale...
timerate rate 1
flag azimuthal_grid on
wait duration 1
% ...e poi quella
altazimutale
flag equatorial_grid off
wait duration 8
flag azimuthal_grid off
wait duration 2
flag
flag
wait
flag
flag
wait
ecliptic_line
meridian_line
duration 8
ecliptic_line
meridian_line
duration 3
on
on
% Facciamo apparire
l’eclittica e
il meridiano celeste
off
off
#MELBOURNE#
moveto lat -37 lon 145 duration 30
% Spostiamoci nell’altro
131
wait duration 33
emisfero, precisamente
a Melbourne (AU), e
visualizziamo le
costellazione del
cielo Sud
flag constellation_drawing on
wait duration 2
select constellation Cru
wait duration 1
select constellation Cen
wait duration 2
flag constellation_names on
wait duration 5
flag constellation_names off
wait duration 2
flag constellation_drawing off
wait duration 2
select nebula SMC pointer off
wait duration 2
zoom auto in duration 10
wait duration 15
zoom auto out duration 10
select
% Viaggiamo verso la
Piccola Nube di
Magellano!
script action pause
select nebula "H II LMC" pointer off
wait duration 2
zoom auto in duration 13
wait duration 18
zoom auto out duration 13
select
script action pause
#CILE#
moveto lat -24.63 lon -70.4 duration 30
wait duration 33
clear
wait duration 2
image action load filename
coordinate_system viewport
image name paranal alpha 1
wait duration 10
image name paranal alpha 0
% E ora spostiamoci
sulla Grande Nube
% Andiamo a visitare
i grandi telescopi
dell’ESO, con
l’aiuto di alcune
immagini del
nostro archivio
/immagini/paranal.jpg name paranal \\
alpha 0 scale 1
duration 5
duration 5
132
D. Script
image action load filename /immagini/vlt.jpg name vlt \\
c oordinate_system viewport alpha 0 scale 1
image name vlt alpha 1 duration 5
wait duration 10
image name vlt alpha 0 duration 5
image action load filename /immagini/silla.jpg name silla \\
coordinate_system viewport alpha 0 scale 1
image name silla alpha 1 duration 5
wait duration 10
image name silla alpha 0 duration 5
image action load filename /immagini/eso.jpg name eso \\
coordinate_system viewport alpha 0 scale 1
image name eso alpha 1 duration 5
wait duration 10
image name eso alpha 0 duration 5
wait duration 7
clear
% Chiudiamo con una bella
#IMMAGINE HELIX#
immagine della Helix
image action load filename /immagini/helix.jpg name helix
coordinate_system viewport alpha 0 scale 1
image name helix alpha 1 duration 5
wait duration 10
image name helix alpha 0 duration 5
select nebula NGC7293 pointer off
zoom auto in duration 10
clear
Appendice E
Tavole di progettazione
dell’apparato
9.9
M46*0.75mm
9.9
31.4
43
31.4
43
M46*0.75mm
A
A
Figura E.1: Profilo e sezione della diagonale.
133
E. Tavole di progettazione dell’apparato
65
134
6
5
50.
54
A
7
B
C
9
6.3
65
36
M46*0.75
29.75
6
50.7
3
A
B
14.6
20.6
6
6.3
2
9
Figura E.2: Attacco obiettivo Canon.
A
8.6
2.6
6
46
2.6
36
6
56
40.8
54
2
A
Figura E.3: Attacco obiettivo fisheye.
135
41
5
M6
RM
6
70
50
22
R3
5
16
76
Figura E.4: Montante.
10
97.62
A
46
46
60
74
92
65.08
97.62
60
30
4.
R 43
5
R3
.55
A
20
B
B
Figura E.5: Blocchetto snodo.
95
136
E. Tavole di progettazione dell’apparato
28.99
19.18
46
46
19.18
41.81
28.99
51.62
51.62
41.81
7
6
34
6
6
6
R4
34
Figura E.6: Blocchetto snodo.
70
59.24
16
24
68
15
120
90
84
125
110
10
118.68
101.32
8
40
R
20
5
5
6.2
35
6.
20
0
6
2
59.24
25
105
34.62
50
12
10
R2
M4
60
Figura E.7: Montante.
−M
5
137
5.69
60
21.25
25
A
12.5
11
47.5
A
8
16
6
14
95
Figura E.8: Prolunga braccetto dello snodo.
150
6
25
27
25
110
15
A
A
10
25
15
6
M6
90
16
16
10
140
10
68
12.5
Figura E.9: Slittone.
30
10
10
6
10
20
22
138
E. Tavole di progettazione dell’apparato
70
10
9
20.39
.2
15
45
R3
24
60
20.39
R
10
70
10
76
57.7
Figura E.10: Rialzo di supporto del proiettore.
Ringraziamenti
Inizierei ringraziando coloro che hanno reso possibile questo progetto, in primis il
Professor Bernieri, relatore e uomo sempre disponibile, paziente, giusto, prodigo di
buoni consigli, accademici e di vita; il Professor Altamore per aver investito tempo e
denaro e per avermi voluto accogliere nel Gruppo di Didattica e Comunicazione della
Fisica e dell’Astronomia; la Dott.ssa Ilaria De Angelis per aver spinto, me e tutta
la macchina, giorno dopo giorno verso la meta. Vorrei poi dedicare una menzione
speciale a Franco Marinilli dell’officina meccanica, per lo straordinario lavoro svolto,
la disponibilità ed estrema gentilezza, e per aver fornito tavole, disegni e foto, parti
integranti della mia Tesi. Già, mia. Ma non è ancora il momento dell’autoelogio.
Un sentito grazie va anche a Francesca Paolucci, amica e lavoratrice instancabile,
che ha trovato anche il tempo di aiutarmi con i disegni di LaTeX.
Devo, anzi voglio, ringraziare la mia famiglia: il babbo, per tutti i suoi “Cecio, ma
quando ti laurei?!” (tranquillo, non mi sono laureato SOLO per non sentirti più!); la
mamma, non tanto perché mi ha voluto bene sempre, ma soprattutto perché giorno
dopo giorno ha imparato a voler bene a sé stessa; il fratello-guiding light, che in
questi trentun anni mi ha aperto le strade della buona musica, delle sane abitudini
di vita, del cambiamento vero. Lo’, so che saprai scusarmi se almeno in ambito
universitario non t’ho seguito...
Dico grazie alla Musica, la mia Arte. E a tutti coloro, vecchi amici di sempre
e piacevolissime scoperte degli ultimi due anni, che insieme a me fanno vibrare le
corde di una passione. Valvola di sfogo, sı̀, ma vera e propria ragion d’essere, soffio
vitale e ispirazione continua, anche per questa mia Tesi. Grazie a tutti gli amici,
compagni sinceri in questo viaggio universitario, che hanno creduto in me più del
sottoscritto.
Ho persino un ringraziamento anonimo da fare, a colei o colui che mi lasciò aprire
quel libro di Astronomia per bambini dove per la prima volta lessi della Cometa di
Halley, e tutto ebbe inizio.
Grazie alla mia vita, la nostra, insieme, storia di ieri, di oggi e di domani. Sempre e comunque, la mia Leggenda Personale. Grazie a me (ecco l’autoelogio), per
avercela fatta, per non aver mollato neanche quando l’Everest a confronto sembrava
la salita di San Saba. Grazie per aver trovato la forza di chiedere aiuto. E grazie a
chi quell’aiuto definitivo l’ha offerto con gioia, col sorriso, con naturale amicizia.
Jai Guru Dev.