Capitolo 9
PROPAGAZIONE DEGLI
ERRORI
La misura della grandezza fisica è generalmente accompagnata dalla stima
dell’errore ad essa associato. Sappiamo come stimare l’errore nel caso di una
misura diretta, ma che cosa accade quando la grandezza fisica in esame è
legata matematicamente ad una o più altre grandezze, ciascuna con il proprio
errore? Si consideri ad esempio l’equazione del moto uniforme:
s =vt
(9.1)
Supponiamo di voler misurare la velocità media di un corpo:
s
(9.2)
t
Entrambe le grandezze s e t sono misurate con una certo errore ∆s e ∆t.
Che errore ∆v dovremo associare alla velocità? In che modo gli errori delle
grandezze coinvolte si ripercuotono sull’errore della quantità che vogliamo
determinare?
Possiamo affermare quindi che nella maggior parte dei casi lo sperimentatore utilizza un metodo di misura indiretto: il valore della grandezza fisica
deriva da misure di altre grandezze, misurate o direttamente o con strumenti
tarati, legate ad essa da una qualche relazione funzionale.
Vediamo un esempio semplice:
Vogliamo calcolare l’area di una superficie S rettangolare conoscendo i
suoi lati a e b e vedere come si propagano gli errori ∆a e ∆b.
Se S = a b, l’errore massimo che possiamo compiere su S è dato da:
v=
S + ∆S = (a + ∆a) (b + ∆b) = a b + a ∆b + b ∆a + ∆ a∆b
89
(9.3)
90
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
Se ∆a ≪ a e ∆b ≪ b allora il termine ∆a ∆b è piccolo rispetto agli altri
termini e si può trascurare, cioè se ci fermiamo ai termini al primo ordine
possiamo scrivere:
∆S = a ∆b + b ∆a
(9.4)
Vediamo adesso in dettaglio come si propagano gli errori in vari sottocasi,
supponendo di aver misurato una o più grandezze a, b, c,... aventi errori ∆a,
∆b, ∆c, ... Chiamiamo x la quantità di cui vogliamo ottenere la misura e
l’indeterminazione per via indiretta.
9.1
Somme e differenze
Sia x = a + b. Il più alto valore probabile di a è a + ∆a, mentre di b è b + ∆b,
quindi il più alto valore probabile per x sarà:
x + ∆x = (a + ∆a) + (b + ∆b) = (a + b) + (∆a + ∆b)
Mentre il più basso sarà:
x − ∆x = (a − ∆a) + (b − ∆b) = (a + b) − (∆a + ∆b)
da cui ricaviamo che:
∆x = ∆a + ∆b
Analogamente, nel caso x = a − b, il più alto valore probabile per x sarà:
x + ∆x = (a + ∆a) − (b − ∆b) = (a − b) + (∆a + ∆b)
Mentre il più basso sarà:
x − ∆x = (a − ∆a) − (b + ∆b) = (a − b) − (∆a + ∆b)
da cui ricaviamo ancora che:
∆x = ∆a + ∆b
Quindi, generalizzando possiamo dire che:
l’errore massimo associato a una grandezza fisica che è il risultato della
somma, o della differenza o di una combinazione di esse, fra due o più grandezze, ciascuna misurata con la propria incertezza, si ottiene sommando gli
errori delle singole grandezze.
x = a + b − c + ....
(9.5)
∆x = ∆a + ∆b + ∆c + ....
(9.6)
91
9.2. PRODOTTI E QUOZIENTI
9.2
Prodotti e quozienti
Sia x = a b. Come prima, il più alto valore probabile di a è a + ∆a, mentre
di b è b + ∆b, quindi il più alto valore probabile per x sarà:
x + ∆x = (a + ∆a) (b + ∆b) = a b + a ∆b + b ∆a + ∆a ∆b
Nell’ipotesi che ∆a ≪ a e ∆b ≪ b, possiamo ragionevolmente assumere
che ∆a ∆b si possa trascurare.
Da cui ricaviamo che:
∆x = a ∆b + b ∆a
Conviene in questo caso introdurre il concetto di errore relativo ∆x/x:
∆x
a ∆b + b ∆a
∆a ∆b
=
=
+
x
ab
a
b
In realtà la notazione corretta è la seguente:
a ∆b + b ∆a
∆a ∆b
∆x
=
=
+
|x|
ab
|a|
|b|
questo perché l’errore relativo deve essere comunque una quantità positiva, a prescindere dal valore della grandezza fisica a cui è associato.
Nel caso in cui x = a/b, il più alto valore probabile per x sarà:
a + ∆a
b − ∆b
Introducendo anche qui l’errore relativo si ha:
x + ∆x =
∆a
a 1 + |a|
x + ∆x =
b 1 − ∆b
|b|
Moltiplicando numeratore e denominatore per 1 +
2
termini (∆b/|b|) e (∆a/|a|)(∆b/|b|), si ottiene:
x + ∆x =
a
∆a ∆b
(1 +
+
)
b
|a|
|b|
Sviluppando questa relazione si ricava:
1+
∆x
∆a ∆b
=1+
+
|x|
|a|
|b|
∆b
,
|b|
e trascurando i
92
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
E infine:
∆x
∆a ∆b
=
+
|x|
|a|
|b|
Quindi, generalizzando possiamo dire che:
l’errore relativo associato a una grandezza fisica che è il risultato del prodotto, o del quoziente o di una combinazione di essi, fra due o più grandezze,
ciascuna misurata con la propria incertezza, si ottiene sommando gli errori
relativi delle singole grandezze.
x=
ab
cd
∆x
∆a ∆b ∆c ∆d
=
+
+
+
|x|
|a|
|b|
|c|
|d|
9.3
(9.7)
(9.8)
Prodotto per una costante
Consideriamo adesso il caso in cui la grandezza di cui vogliamo stimare l’errore sia il risultato del prodotto di un’altra grandezza che misuriamo con una
costante priva di indeterminazione. Sia cioè: x = k b, con k costante.
Utilizziamo la formula trovata nella sezione precedente:
∆k ∆b
∆x
=
+
|x|
|k|
|b|
Poiché k non ha un errore associato, la quantità ∆k = 0. Quindi:
E infine:
∆b
∆x
=
|x|
|b|
∆x = |k| ∆b
9.4
Potenza
Consideriamo infine il caso in cui la grandezza di cui vogliamo determinare
l’incertezza è legata alla grandezza misurata, o alle grandezze misurate, da
una legge di potenza. Sia cioè: x = an .
E’ sufficiente scrivere la precedente espressione nella forma:
x = a1 a2 a3 ... an
93
9.5. CASO GENERALE
con
a1 = a2 = a3 = ... = an = a
Per cui, l’errore è dato da:
∆x
∆a
=n
|x|
|a|
Nel caso di espressioni più complesse che includono prodotti di potenze
di più variabili, come ad esempio:
x = an bk
si applica una combinazione della regola del prodotto e della potenza,
cioè:
∆x
∆a
∆b
= |n|
+ |k|
|x|
|a|
|b|
9.5
Caso generale
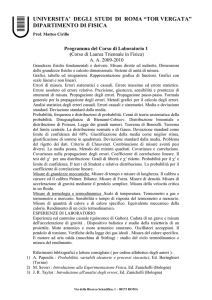
Supponiamo di aver misurato una grandezza x0 e aver determinato il suo
errore ∆x. Ora vogliamo sapere come si propagherà l’incertezza di x0 sulla
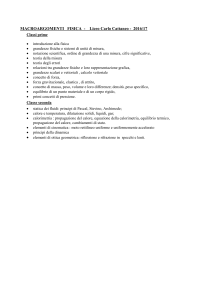
grandezza y = f (x).
f (x0+∆x)
f (x0 )
f (x0−∆x)
x0−∆x
x0
x0+ ∆x
Il più grande valore probabile di x0 è x0 + ∆x, mentre il più piccolo valore
probabile è x0 − ∆x. Dal grafico si può facilmente vedere che il più grande
e il più piccolo valore probabile di y saranno f (x0 + ∆x) e f (x0 − ∆x).
Se l’errore ∆x è sufficientemente piccolo rispetto a x0 , allora il tratto
di curva compreso fra x0 − ∆x e x0 + ∆x si può approssimare con la retta
94
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
tangente in x0 e assumere che, essendo uguale l’ampiezza degli intervalli
[x0 − ∆x, x0 ] e [x0 , x0 + ∆x] :
f (x0 + ∆x) − f (x0 ) = ∆f
f (x0 ) − f (x0 − ∆x) = ∆f
Da cui, sommando membro a membro, si ricava che l’indeterminazione
da associare alla funzione y è:
ossia:
f (x0 + ∆x) − f (x0 − ∆x) = 2∆f
f (x0 + ∆x) − f (x0 − ∆x)
2
Poiché in generale f (x0 +∆x) e f (x0 −∆x) sono spesso incogniti o difficili
da derivare, si deve ricorrere a qualche approssimazione. Consideriamo quindi
l’espressione:
∆f =
∆f = f (x0 + ∆x) − f (x0 )
Essendo ∆x piccolo, possiamo espandere la funzione y in serie di Taylor
al primo ordine e scrivere:
df df (x0 + ∆x − x0 ) = f (x0 ) + ∆x
f (x0 + ∆x) = f (x0 ) + dx x=x0
dx x=x0
E quindi:
df ∆f =
∆x
dx x=x0
cioè per trovare l’errore associato alla funzione y = f (x) dobbiamo caldf
e moltiplicarla per l’errore ∆x. Resta inteso che la
colare la derivata
dx
df
derivata
deve essere non nulla o prossima a zero per x = x0 .
dx
Si faccia inoltre attenzione che non necessariamente (x + ∆x) > (x − ∆x)
implica f (x + ∆x) > f (x − ∆x). Nel caso in cui la pendenza della retta sia
negativa, si avrà:
df ∆x
∆f = − dx x=x0
95
9.5. CASO GENERALE
E quindi generalizzando:
df ∆x
∆f = dx x=x0
Se adesso la grandezza y è funzione di k grandezze xj misurate direttamente, cioè y = f (x1 , x2 , · · · xk ), allora dovremo fare uso del concetto di
differenziale di una funzione di più variabili: per variazioni infinitesime dxj
la variazione di y è data dal differenziale di f (x):
k
X
∂f
df =
dxj
∂xj
j=1
Se gli errori ∆xj sono sufficientemente piccoli da giustificare l’approssimazione lineare e le derivate sono non nulle, l’errore massimo di y è dato dal differenziale della funzione f (x1 , x2 , · · · xk ), prendendo i moduli delle
derivate:
k X
∂f ∆f =
∂xj j=1
∆xj
xj =xjo
La propagazione degli errori massimi mediante l’uso del differenziale si
basa sull’assunzione che le variazioni infinitesime delle variabili siano date dai
rispettivi errori. Poiché si vuole stimare l’errore massimo per y è opportuno
sommare tutti i termini coerentemente, ovvero si prendono i moduli delle
derivate parziali. Di solito viene considerato l’errore massimo nei casi in cui:
(1) il metodo di misura sia grossolano, la ripetizione delle misure porti sempre
allo stesso risultato entro l’errore di sensibilità dello strumento o del metodo;
(2) non ci sia stata la possibilità di ripetere un numero sufficientemente alto
di misure (n ≥ 10) per poter stimare l’errore quadratico medio; (3) si possa
approssimare ∆f (x) ≈ 3 σf (x) per n ≥ 10.
96
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
9.6
9.6.1
Esempi in fisica
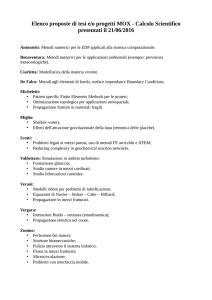
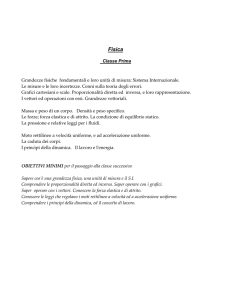
Legge di Snell
n1
i
r
n2
Quando un fascio di luce attraversa due mezzi aventi indice di rifrazione
diverso, subisce una deviazione nella sua direzione di propagazione, secondo
la famosa Legge di Snell:
n1 sin i = n2 sin r
Dove n1 e n2 sono gli indici di rifrazione dei due mezzi, i è l’angolo di
incidenza e r è l’angolo di rifrazione, entrambi misurati rispetto alla verticale
alla superficie di separazione dei due mezzi. Se assumiamo che il primo mezzo
sia l’aria, allora n1 = 1, e possiamo calcolare n2 = n misurando i due angoli
i ed r:
n=
sin i
sin r
Alla misura di questi angoli sarà associato un errore, rispettivamente ∆i
e ∆r. Applicando la formula generale della propagazione degli errori, si
ottiene:
∂n ∂n ∆n = ∆i + ∆r
∂i
∂r
Da cui:
97
9.6. ESEMPI IN FISICA
1 ∂sin i ∂ 1 ∆n = ∆i + sin i
∆r
sin r ∂i ∂r sin r cos i sin i cos r ∆i + −
∆r
∆n = sin r (sin r)2 Dividendo ambo i membri per n si ricava l’errore relativo:
∆n ∆i ∆r +
=
n
tan i tan r È possibile raggiungere il medesimo risultato applicando l’espressione della propagazione degli errori nel caso del quoziente. Si scriva X = sin i e
Y = sin r, allora sarà:
n=
X
Y
e l’errore relativo sarà:
∆n ∆X ∆Y
=
+
n
X Y
Poiché X e Y non sono quantità misurate direttamente ma ottenute
da funzioni delle quantità misurate i e r, le espressioni per ∆X e ∆Y si
otterranno differenziando X e Y :
∆X =
d sin i
∆i = cos i ∆i
di
∆Y =
d sin r
∆r = cos r ∆r
dr
Da cui:
E infine:
∆n cos i ∆i cos r ∆r +
=
n
sin i sin r ∆n ∆i ∆r +
=
n
tan i tan r 98
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
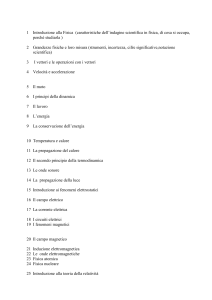
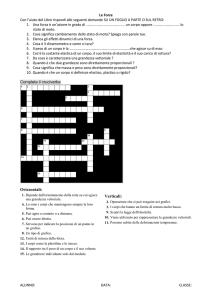
9.6.2
Legge dei punti coniugati
Consideriamo un sistema ottico, ad esempio una lente convergente sottile di
lunghezza focale f non conosciuta, e poniamo da un lato una sorgente luminosa a una distanza p dal centro della lente. La lente formerà un’immagine
dall’altro lato ad una distanza q dal centro.
p
f
q
Le tre quantità in gioco sono legate dalla legge dei punti coniugati:
1 1
1
+ =
p q
f
Vogliamo determinare la focale f e il suo errore ∆f , noti p ± ∆p e q ± ∆q.
Conviene scrivere l’espressione per la lunghezza focale nel modo seguente:
f=
pq
p+q
Sarà quindi:
∂f ∂f ∆f = ∆p + ∆q
∂p
∂q
Ora, la derivata parziale di f rispetto a p vale:
− (pq) ∂(p+q)
(p + q) ∂(pq)
q2
∂f
p
p
=
=
∂p
(p + q)2
(p + q)2
Mentre la derivata parziale di f rispetto a q vale:
p2
∂f
=
∂q
(p + q)2
E quindi sostituendo e calcolando l’errore relativo si ottiene:
99
9.6. ESEMPI IN FISICA
q ∆p p ∆q ∆f
=
+
f
p + q p p + q q Poiché p, q e f sono tutte quantità positive il modulo non è necessario, e
si può scrivere:
∆f
q + p − p ∆p p + q − q ∆q
=
+
f
p+q
p
p+q q
da cui si ottiene:
∆p ∆q ∆p + ∆q
∆f
=
+
−
f
p
q
p+q
Proviamo ora a vedere cosa accade se poniamo X = pq e Y = p + q. In
questo caso:
∆X ∆Y ∆f
=
+
f
X Y Per ottenere ∆X e ∆Y bisogna differenziare le loro espressioni:
∆X = q∆p + p∆q
∆Y = ∆p + ∆q
Da cui si ha:
q∆p + p∆q ∆p + ∆q ∆f
+
= p+q f
pq
∆p ∆q ∆p + ∆q ∆f
+ +
= f
p q p+q Di nuovo, essendo le variabili tutte quantità positive i moduli si possono
eliminare. Si può verificare agevolmente che quest’ultima espressione non
coincide con quella ottenuta applicando la formula generale per la propagazione degli errori! Questo accade perché le stesse variabili si presentano
sia al numeratore che al denominatore e quindi variazioni ∆p o ∆q agiscono
contemporaneamente e possono produrre un effetto compensativo. Di conseguenza, in questi casi particolari, utilizzare il metodo appena esposto produce
una sovrastima dell’errore e quindi non è consigliabile.
100
9.7
9.7.1
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
Esempi in astrofisica
Flusso e magnitudine
La magnitudine di una stella è legata al flusso di energia misurato dall’osservatore dalla seguente espressione:
m = m0 − 2.5 log10 f
dove m è la magnitudine, m0 è una costante e f è il flusso di energia
emesso dalla stella considerata. Il flusso viene misurato integrando il segnale
luminoso registrato su un rivelatore (CCD, lastra fotografica) all’interno di
un’apertura di raggio alcuni secondi d’arco. Al variare dell’apertura scelta,
varia anche il flusso di energia in essa contenuto. Le fluttuazioni casuali
del segnale, che chiamiamo rumore, introducono significative incertezze nella
misura del flusso.
Se misuriamo più volte il flusso della stella in esame, oppure se consideriamo più immagini della stessa stella e in ognuna di essere misuriamo il
flusso, possiamo stimare l’incertezza ∆f .
Come si traduce questa incertezza in termini di magnitudine, ∆m ?
Applichiamo le formule viste prima:
dm ∆f
∆m = df 101
9.7. ESEMPI IN ASTROFISICA
d
∆m = (m0 − 2.5 log10f ) ∆f
df
d
d
∆m = m0 ∆f + 2.5 log10 f ∆f
df
df
Convertendo il logaritmo decimale in logaritmo naturale, e considerando
che m0 è una costante, si ha:
2.5 d
∆f
lnf
∆m =
ln10 df
∆m = 1.086
∆f
f
In questo caso, poiché f è una quantità sicuramente positiva, il modulo
non è necessario. Un errore del 20% sulla misura del flusso, si traduce in
circa 0.2 mag di errore. Si consideri che la tecnica dei transiti, utilizzata
per identificare candidati pianeti extrasolari, ossia pianeti in orbita attorno
a stelle diverse dal Sole, richiede una precisione dell’ordine del millesimo di
magnitudine, che significa un errore nella misura del flusso dell’ordine dello
0.1%.
9.7.2
Flusso di una riga spettrale
Supponiamo di osservare una nebulosa della Via Lattea attraverso un telescopio dotato di uno spettrografo. Lo spettro I(λ) risultante mostrerà una
serie di righe spettrali in emissione che rappresentano la distribuzione di
energia in funzione della lunghezze d’onda. Ogni riga spettrale corrisponde
a un determinato salto di energia degli elettroni di un atomo o di una specie
atomica.
102
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
Per ottenere il flusso di una riga bisogna integrare il suo profilo nella direzione delle lunghezze d’onda. Il profilo ha una forma che ricorda la funzione
gaussiana e quindi si può usare l’approssimazione:
Z ∞
(λ−λ0 )2
f (λ0 ) =
I0 e− 2σ2 dλ
−∞
dove λ0 è la lunghezza d’onda della riga spettrale considerata, I0 è l’intensità della riga a λ = λ0 e infine σ è un parametro che da’ la larghezza
della riga. Il calcolo di questo integrale non è immediato, mentre il risultato
è molto semplice:
f (λ0 ) =
√
2πI0 σ
Il calcolo del flusso della riga è quindi funzione di due variabili, I0 e σ,
ognuna delle quali sarà misurata con una certa incertezza, ∆I0 e ∆σ.
Applicando la propagazione degli errori si ha:
∂f ∆I0 + ∂f ∆σ
∆f = ∂σ ∂I0 Da cui si ottiene:
∆f =
√
2π∆I0 +
Dividendo ambo i membri per f si ha:
√
2πI0 ∆σ
9.7. ESEMPI IN ASTROFISICA
∆f
=
f
√
103
√
2πσ∆I0 + 2πI0 ∆σ
√
2πI0 σ
E infine:
∆f
∆I0 ∆σ
=
+
f
I0
σ
Un errore del 10% nella misura di I0 e del 5% nella misura di σ si trasforma
in un errore del 15% nel flusso della riga. Si tenga conto che errori relativi
tipici nella misura dei flussi delle righe spettrali variano dal 5% al 20-30%.
9.7.3
Rapporti di intensità fra righe spettrali
In spettroscopia è usuale calcolare rapporti fra intensità delle righe spettrali misurate. Poiché ogni riga è accompagnata da un’incertezza, il rapporto fra due o più righe avrà a sua volta un’incertezza che si può facilmente
calcolare applicando il metodo di propagazione degli errori.
Supponiamo che il rapporto fra due righe spettrali di flusso f1 ± ∆f1 e
f2 ± ∆f2 sia:
104
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
R1 =
f1
f2
Allora, l’incertezza su R1 vale:
∂R1 ∂R2 ∆f1 + ∆R1 = ∂f2 ∆f2
∂f1 Da cui:
E infine:
∆f1 f1
+ − ∆f2 ∆R1 = 2
f2
f2
∆R1 ∆f1 ∆f2 =
+
R1
f1 f2 Anche in questo caso, poiché si stanno trattando grandezze positive, il
modulo non è necessario.
Nel caso in cui:
R2 =
f1 + f2
f3
L’incertezza su R2 vale:
∂R2 ∂R2 ∂R2 ∆f1 + ∆R2 = ∂f2 ∆f2 + ∂f3 ∆f3
∂f1 ∆R2 =
∆f1 ∆f2 f1 + f2
∆f3
+
+
f3
f3
f32
∆f1 + ∆f2 ∆f3
∆R2
=
+
R2
f1 + f2
f3
9.7.4
Legge di Hubble
Proviamo ad applicare la propagazione degli errori ad una delle leggi astronomiche più importanti e famose, la legge di Hubble:
v = H0 d
105
9.7. ESEMPI IN ASTROFISICA
Vogliamo calcolare la distanza d di una galassia e per farlo dobbiamo stimare la sua velocità di recessione v ± ∆v, sapendo che la costante di Hubble
vale H0 = 72 ± 3 km s−1 Mpc−1 . Per farlo puntiamo un telescopio dotato di uno spettrografo nella direzione della galassia in esame e acquisiamo
uno spettro, il quale per effetto dell’espansione dell’universo e quindi dell’allontanamento delle galassie dalla nostra posizione di osservatori, avrà le
righe spettrali spostate a lunghezze d’onda maggiori rispetto al valore che
avrebbero se questo allontanamento non ci fosse (redshift).
Consideriamo una riga spettrale di lunghezza d’onda λ0 , per effetto del
redshift essa si troverà a lunghezza d’onda λ, con λ > λ0 . Dalla misura
della posizione della riga spettrale nello spettro della galassia osservata si
determina il redshift z e la velocità di recessione:
z=
λ − λ0
λ0
v = cz
con c velocità della luce.
Quindi possiamo esprimere la distanza d in questi termini:
106
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
c
λ
d=
−1
H 0 λ0
Il valore della lunghezza d’onda misurata λ della riga spettrale in esame
avrà una certa incertezza ∆λ, quindi l’errore sulla distanza sarà influenzato
sia da ∆λ che da ∆H0 . Applicando la propagazione degli errori si ottiene:
∂d ∂d ∆H0
∆d = ∆λ + ∂λ
∂H0 ∂
∂
c
c(λ − λ0 ) 1 c ∆λ + ∆H0
λ−
∆d = ∂λ H0 λ0
H0 ∂H0
λ0
H0 c c(λ − λ0 ) 1 ∆H0
∆d = ∆λ + −
H 0 λ0 λ0
H02 E passando all’errore relativo:
∆λ
∆H0
∆d
=
+
d
(λ − λ0 )
H0
9.8. PROPAGAZIONE DEGLI ERRORI STATISTICI O QUADRATICI107
Essendo l’errore su H0 relativamente piccolo, è facile capire che la principale sorgente di errore nella determinazione della distanza sta nella misura
accurata delle posizioni delle righe spettrali.
Possiamo arrivare allo stesso risultato ponendo d = X Y , dove X =
Y = ( λλ0 − 1).
Infatti:
∆d ∆X ∆Y +
=
d
X Y c
H0
e
∆c ∆H0
∆H0
∆X
=
+
=
X
c
H0
H0
perché c è una costante priva di errore.
Inoltre:
∆Y =
∆λ
λ0
e
Quindi, concludendo:
9.8
9.8.1
∆λ
∆Y
=
Y
λ − λ0
∆d ∆H0 ∆λ +
=
d
H 0 λ − λ0 Propagazione degli errori statistici o quadratici
Caso 1
Supponiamo di voler calcolare una grandezza fisica y che sia funzione di una
sola grandezza x misurata direttamente. Sia cioè: y = f (x).
Effettuiamo adesso n misure dirette, indipendenti e nelle stesse condizioni della grandezza x, dalle quali poi calcoliamo la media aritmetica x̄ e
lo scarto quadratico medio σ(x). Qual è la miglior stima per f (x) e quale
indeterminazione dobbiamo associare?
108
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
In corrispondenza alle n misure dirette xi si hanno n valori di y =
y1 , y2 , · · · yn = f (x1 ), f (x2 ), · · · f (xn ), con valore medio:
Pn
f (xi )
ȳ = i=1
n
Ricordiamo che una funzione f (x) si può sviluppare in serie di Taylor
nell’intorno di un punto x0 arbitrario:
df 1 d2 f f (x) = f (x0 ) +
(x − x0 ) +
(x − x0 )2 + · · ·
2
dx x=x0
2 dx x=x0
Particolarizziamo lo sviluppo in serie ad un intorno del punto x̄ e trascuriamo i termini di ordine superiore al primo. Otteniamo cosı̀:
df (xi − x̄)
yi = f (xi ) ≃ f (x̄) +
dx x=x̄
Ciò può essere fatto per ogni misura diretta della variabile xi . La media
aritmetica delle quantità yi può essere scritta nella forma:
Pn
df nf (x̄) + dx
i=1 (xi − x̄)
x=x̄
ȳ =
n
Poiché la somma degli scarti rispetto alla media è nulla, cioè
n
X
i=1
Si ottiene:
(xi − x̄) = 0
ȳ = f (x̄)
cioè il valor medio di una funzione coincide con il valore della funzione in
corrispondenza al valore medio dell’argomento. Tale risultato è valido solo
approssimativamente, dato che nello sviluppo in serie di Taylor sono stati
trascurati i termini di grado superiore al primo. I termini dello sviluppo in
serie contengono le potenze (xi − x̄)i , quindi poterli trascurare è giustificato
se gli errori delle misure dirette sono piccoli. Il risultato è valido esattamente
se la funzione y dipende linearmente dalle altre grandezze.
Calcoliamo adesso lo scarto quadratico medio di y:
9.8. PROPAGAZIONE DEGLI ERRORI STATISTICI O QUADRATICI109
n
X
i=1
σ 2 (y) =
=
=
n X
i=1
n−1
=
2
df f (x̄) +
(xi − x̄) − f (x̄)
dx x=x̄
n−1
2 n X
df dx i=1
[f (xi ) − f (x̄)]2
x=x̄
(xi − x̄)2
n−1
=
df
dx
2
=
σ 2 (x)
Quindi lo scarto quadratico medio risulta:
df σ[f (x)] = σ(x)
dx
Risultato formalmente identico a quello trovato per gli errori massimi,
sostituendo σ(x) al posto di ∆x.
Vediamo di seguito alcune applicazioni di uso frequente.
• Moltiplicazione per una costante: y = α x
σ 2 (y) = α2 (x) σ 2 (x) → σ(y) = |α| σ(x)
• Logaritmo naturale: y = ln(x)
σ 2 (y) =
σ 2 (x)
σ(x)
→ σ(y) =
2
x
x
• Elevamento a potenza: y = xα
2
σ(y)
σ(x)
σ 2 (y)
2 σ (x)
=
α
→
= |α|
2
2
y
x
y
x
110
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
9.8.2
Caso 2
Consideriamo adesso un caso più generale, cioè sia y = f (x1 , x2 , · · · xk ), una
funzione di k grandezze misurate direttamente ed affette da errori accidentali, di entità σ1 , σ2 , · · · σk . Siamo in una situazione diversa rispetto agli errori
massimi. In quest’ultimo caso era sufficiente sommare coerentemente tutti i
contributi, presi in modulo. Nel caso degli errori accidentali ad ogni misura essi si combinano in modo imprevedibile, potendo portare anche ad una
parziale o totale compensazione.
Ripetendo n misure dirette per le k variabili si ottiene una distribuzione
di valori di y, data da tutte le possibili combinazioni degli errori accidentali
sulle xj . Tale distribuzione è rappresentata da un istogramma di frequenza,
con valori di y più frequenti di altri corrispondenti alle combinazioni più
frequenti di errori, e con larghezza determinata oltre che dall’entità dei ∆xj
anche dalle modalità di dette combinazioni.
Calcoliamo adesso il valore medio.
Sia y = f (x1 , x2 , · · · xk ) e si effettuino n misure per ciascuna delle k
variabili. Sia inoltre xji la misura i-esima della variabile j-esima.
Analogamente al caso di una sola variabile sviluppiamo in serie di Taylor
arrestandoci al termine di primo grado:
f (x1i , x2i , · · · xki ) = f (x̄1 , x̄2 , · · · x̄k ) +
k X
∂f
j=1
∂xj
xj =x̄j
(xji − x̄j )
Quindi, dalla definizione di valore medio di y si ottiene:
ȳ =
n
X
i=1
f (x1i , x2i , · · · xki )
n
n f (x̄1 , x̄2 , · · · x̄k ) +
=
n X
k X
∂f
i=1 j=1
∂xj
x=x̄
(xji − x̄j )
n
Dalla proprietà della media aritmetica per cui la somma degli scarti è
identicamente nulla,
n
X
i=1
otteniamo:
(xji − x̄j ) = 0; ∀ j = 1, 2, · · · k
9.8. PROPAGAZIONE DEGLI ERRORI STATISTICI O QUADRATICI111
ȳ = f (x̄1 , x̄2 , · · · x̄k )
Calcoliamo ora lo scarto quadratico medio.
Espandiamo la i-esima determinazione yi in serie di Taylor nell’intorno
del valore medio ȳ arrestata ai termini di primo ordine (approssimazione di
linearità):
yi = f (x1i , x2i , · · · xki ) = f (x̄1 , x̄2 , · · · x̄k ) +
k X
∂f
j=1
∂xj
xj =x̄j
(xji − x̄j )
Valutiamo lo scarto i-esimo rispetto alla media:
yi − ȳ =
k X
∂f
j=1
∂xj
xj =x̄j
(xji − x̄j )
Calcoliamo la varianza di y:
σ 2 (y) =
σ 2 (y) =
=
" k n
X
X ∂f 2
i=1
j=1
∂xj
n
X
i=1
(yi − ȳ)2
n−1
" k n
X
X ∂f i=1
j=1
∂xj
(xji − x̄j )
n−1
#2
=
#
k−1 X
k
X
∂f
∂f
(xli − x̄l )(xmi − x̄m )
(xji − x̄j )2 + 2
∂xl
∂xm
l=1 m=l+1
n−1
Si può vedere che σ(y)2 è dato dalla somma di due componenti, la prima
contenente termini quadratici del tipo (xji − x̄j )2 , la seconda contenente
termini misti del tipo (xli − x̄l )(xmi − x̄m ). La prima parte può essere riscritta
come:
2 X
k n
X
∂f
(xji − x̄j )2
j=1
∂xj
i=1
n−1
112
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
Quindi si può scrivere:
2
σ (y) =
2
k X
∂f
j=1
∂xj
σ 2 (xj )
a cui vanno aggiunti termini misti contenenti i prodotti
∂f
∂f
(xli − x̄l )(xmi − x̄m )
∂xl
∂xm
detti termini di covarianza.
Si dimostra che se le variabili sono indipendenti i termini di covarianza
sono piccoli e tendono a zero quando il numero di misure tende all’infinito. In
queste condizioni la legge di propagazione degli errori quadratici o statistici
diventa:
2
σ (y) =
2
k X
∂f
j=1
∂xj
σ 2 (xj )
Quindi in pratica si effettua la somma in quadratura dei prodotti delle
derivate parziali per gli errori statistici delle singole variabili.
Ricordiamo che tale trattazione approssimata vale quando: (1) le misure dirette sono affette da errori sufficientemente piccoli da legittimare la
linearizzazione della grandezza y (sviluppo in serie di Taylor arrestato al
primo ordine); (2) le grandezze misurate direttamente siano variabili indipendenti, cioè se in pratica non vi è influenza reciproca tra le misure delle
diverse grandezze. Il procedimento è esatto nel caso in cui la grandezza y sia
combinazione lineare di varibili indipendenti.
Vediamo di seguito alcune applicazioni di uso frequente.
• Somma o differenza : g = x ± y
σ 2 (g) = σ 2 (x) + σ 2 (y)
• Combinazioni lineari: g = ±a · x ± b · y ± · · ·
σ 2 (g) = a2 · σ 2 (x) + b2 · σ 2 (y) + · · ·
• Moltiplicazione o divisione: g = x · y o g = x/y
passando ai logaritmi ln(g) = ln(x) ± ln(y) e differenziando
9.8. PROPAGAZIONE DEGLI ERRORI STATISTICI O QUADRATICI113
σ 2 (g)
σ 2 (x) σ 2 (y)
=
+
ḡ 2
x̄2
ȳ 2
• Combinazioni del tipo: g = Axα · y β
passando ai logaritmi ln(g) = ln(A) + α · ln(x) + β · ln(y)
2
2
σ 2 (g)
2 σ (x)
2 σ (y)
=
α
·
+
β
·
ḡ 2
x̄2
ȳ 2
Applicando quanto sopra agli errori accidentali risulta che: (1) in caso di
somme o sottrazioni l’errore assoluto finale è la radice quadrata della somma
in quadratura dei singoli errori assoluti; (2) in caso di moltiplicazioni o divisioni l’errore relativo finale è la radice quadrata della somma in quadratura
dei singoli errori relativi.
9.8.3
Combinazione di errori massimi e statistici
Consideriamo il caso misto in cui la misura di una grandezza fisica dipenda
da altre grandezze affette da errori sia massimi che statistici. Si può operare
in modo diverso a seconda dello scopo della nostra misura.
Se vogliamo sapere con “certezza” in quale intervallo cada il valor vero della grandezza in esame dobbiamo usare la trattazione degli errori
massimi.
Consideriamo il caso di un singolo errore massimo e di un singolo errore
statistico, situazione cui sempre ci si può ricondurre combinando prima tutti
gli errori massimi e poi tutti quelli statistici. Si trasforma l’errore statistico
in massimo
∆m ≈ 3σm
dove σm è lo scarto quadratico medio della serie di determinazioni per m.
Infatti, nel caso ideale della distribuzione gaussiana degli errori accidentali
la probabilità di osservare uno scarto dalla media maggiore in modulo di 3σ
è inferiore allo 0.3% (molto piccola).
Se vogliamo ottenere una stima realistica ma probabilistica dell’errore
dobbiamo usare la trattazione degli errori quadratici.
Se una grandezza m è misurata con errore massimo ∆m, possiamo procedere in due modi:
• Assumere una distribuzione uniforme, ovvero costante (misure equiprobabili) entro l’intervallo [m − ∆m, m + ∆m] e nulla al di fuori. Si
114
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI
dimostra che tale distribuzione ha varianza σ 2 (m) =
l’ errore quadratico medio è
(2∆m)2
e quindi
12
∆m
σ(m) = √ ≃ 0.577 ∆m
3
• Assumere una distribuzione gaussiana, con picco centrato nel valor medio dell’intervallo ed errore quadratico medio tale che 6 σ(m)
copra l’intera larghezza dell’intervallo. Sotto queste ipotesi l’ errore
quadratico medio è
σ(m) =
9.8.4
∆m
≃ 0.333 ∆m
3
Lo scarto quadratico medio della media
L’indeterminazione statistica della media, o meglio la larghezza della distribuzione relativa alle medie di una serie di misure effettuate in condizioni
identiche, si può ottenere applicando la propagazione degli errori statistici.
Se n è il numero totale di misure e mi la misura i-esima:
m̄ =
n
X
mi
i=1
n
v
u n 2
uX ∂ m̄
t
σm̄ =
σ(mi )
∂m
i
i=1
Poiché le mi sono misure della stessa grandezza si può associare ad esse
∂ m̄
1
σ(mi ) = σ; inoltre si ha
= .
∂mi
n
Quindi lo scarto quadratico medio della media è:
σm̄ =
v
u
u
σm̄ = t
r
n σ2
σ
=√
2
n
n
n
X
1
(mi − m̄)2
n(n − 1) i=1
9.8. PROPAGAZIONE DEGLI ERRORI STATISTICI O QUADRATICI115
1
La dipendenza da √ rende sempre più difficile diminuire σm̄ aumenn
tando il numero di misure. Anche se si potesse realizzare un numero elevatissimo di misure, diventerebbe impossibile mantenere costanti le condizioni
sperimentali. L’usura degli strumenti potrebbe introdurre errori sistematici.
116
CAPITOLO 9. PROPAGAZIONE DEGLI ERRORI