www.oama.it
Sistema di puntamento elettronico FS2
Febbraio 2006: il telescopio Lotti dispone di un sistema di puntamento elettronico su entrambi gli assi. Il dispositivo,
ampiamente collaudato su numerosi telescopi di diverse dimensioni, è prodotto dalla Astro Electronic (http://www.astroelectronic.de/). Gli adattamenti meccanici, lo studio del progetto e l'installazione sono stati realizzati dai tecnici di
Astrotech Engineering ( http://www.astrotech.it/).
Il sistema consiste di una unità di controllo (FS2) che presenta diversi collegamenti: alla pulsantiera, ai motori di
ascensione retta e di declinazione, alla porta seriale del PC, ad eventuali encoders, al dispositivo di autoguida.
La scelta di adeguati motori è essenziale per permettere un preciso e ripetibile puntamento degli oggetti celesti da una
parte e, dall'altra, un corretto moto di inseguimento siderale. Con la consulenza dei tecnici di Astrotech ci siamo orientati
su motori passo-passo SECM8, dotati di riduttore epicicloidale 1:5. I motori, da 200 passi intero per giro, sono adoperati
in modalità micropasso, con 64 micropassi per passo intero. Grazie all'elevato rapporto di trasmissione tra l'ingranaggio
del motore e l'asse polare del telescopio (corona dentata da 359 denti con vite senza fine + riduttore epicicloidale 1:5) un
micropasso corrisponde, sul piano focale, ad un angolo di soli 0.06 secondi di arco! Un valore estremamente piccolo, se
confrontato con l'attuale scala sul piano focale del telescopio lotti + CCD SBIG ST6, pari a 2.4 secondi di arco/pixel. Con
tale configurazione, l'inseguimento siderale risulta assolutamente preciso e privo di "vibrazioni".
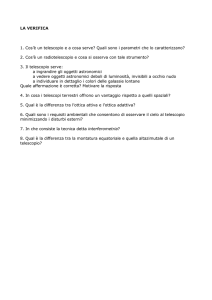
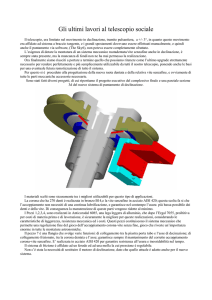
Figura 1: l'accoppiamento vite senza fine - corona dentata sull'asse polare, il motore passo passo SECM8 e la
pulsantiera di controllo dell'unità FS2.
 In modalità puntamento, i motori passo passo vengono adoperati alla massima velocità possibile, compatibilmente con
l'inerzia del telescopio e con gli attriti interni. Il motore SECM8 è caratterizzato da una coppia massima di 1.12 Nm.
Abbiamo misurato il momento di attrito dell'asse polare ottenendo un valore di ~ 10 Nm mentre abbiamo stimato il
momento di inerzia del telescopio rispetto all'asse polare intorno ai 300 Kgm^2. Con questi parametri, settando
opportune rampe di accelerazione, è stato possibile ottenere una velocità di puntamento = 240X (240 volte la velocità di
inseguimento siderale, pari ~ 0.0000729 rad/s) che permette di coprire un angolo della volta celeste di 60º in un solo
minuto.
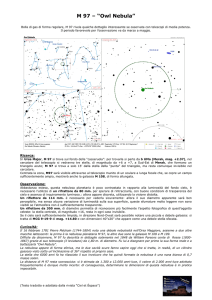
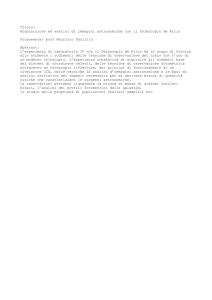
Figura 2: l'intervento sull'asse di declinazione.
 Grazie alla buona messa in stazione del telescopio, all'accuratezza con cui l'asse ottico risulta perpendicolare all'asse di
declinazione e alle precisioni meccaniche con cui sono stati realizzati gli assi abbiamo verificato che, anche con
movimenti ampi un centinaio di gradi sulla volta celeste, gli oggetti vengono inquadrati nel campo del CCD, che
ricordiamo è di circa 10 primi di arco in declinazione.L'unità di controllo FS2 supporta il protocollo di comunicazione
LX200 che assicura l'interfacciamento con molti software planetari, tra cui TheSky, quello da noi adoperato. La
disponibilità di librerie di funzioni quali Sky.tlb e TheSky6.tlb permette il controllo dell'unità FS2 e quindi la realizzazione
di software personalizzati per la movimentazione del telescopio.Abbiamo realizzato una caratterizzazione del moto
siderale ottenuto con il nuovo sistema di puntamento. Ci siamo avvalsi della possibilità di realizzare riprese con piccoli
tempi di integrazione (1-2 secondi) e di registrare la posizione di una stella, sulla matrice del sensore digitale, mentre il
telescopio ruota attorno all'asse polare, seguendo la volta celeste (tracking). Si ottiene un dataset costituito dalle
coordinate cartesiane del centro dell'immagine stellare (espresse dall'indice di riga e di colonna del pixel centrale) e dal
tempo di acquisizione dell'immagine. Diviene possibile mettere in evidenza qualunque difetto di inseguimento (imputabile
all'imperfetto accoppiamento corona dentata/vite senza fine, al funzionamento dei motori, ad eventuali flessioni
meccaniche, ecc.) analizzando le variazioni di posizione dell'immagine stellare rispetto a quella iniziale.La figura 3
mostra il risultato di una misura effettuata precedentemente all'installazione del sistema di puntamento FS2, quando il
moto siderale era assicurato da un motore sincrono Crouzet con opportuni motoriduttori. Il tracking è stato eseguito su
una stella con declinazione ~ 0º e che stava transitando in meridiano.
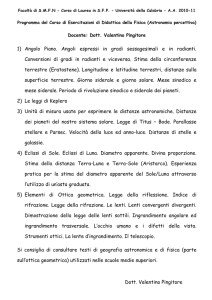
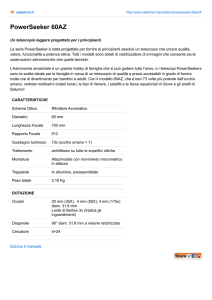
Figura 3: caratterizzazione del moto di inseguimento siderale del "vecchio" sistema.Poiché la vite senza fine compie una
rotazione in 4 minuti, ci aspettiamo una periodicità di eventuali difetti pari, appunto, a 240 secondi. Al contrario, come
risulta dal grafico, esistono delle variazioni che si ripetono ogni minuto. L'ampiezza è pari a circa 2-3 pixel (con i nostri
strumenti, 1 pixel corrisponde a 2.4 secondi di arco, sull'equatore celeste) e questo è sufficiente, purtroppo, a produrre
delle immagini stellari leggermente allungate, quando si adopera un tempo di integrazione dell'ordine del minuto. Il difetto
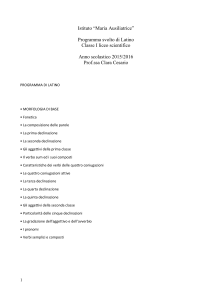
diventa meno evidente fotografando zone della volta celeste ad alta declinazione ma, come si può notare nella figura 4
che ritrae la nebulosa M1 (declinazione = +22º ), alle declinazioni intermedie la puntiformità delle stelle è compromessa:
esse appaiono leggermente allungate nella direzione orizzontale, proprio per il difetto messo in luce dal grafico di figura 3.
Figura 4: nebulosa M1 ripresa con un tempo di integrazione di 60 secondi (vecchio sistema di inseguimento).
 La figura 5 mostra una misura di tracking effettuata con il nuovo sistema FS2, nelle stesse condizioni operative
adoperate per la precedente analisi:
http://www.oama.it
Realizzata con Joomla!
Generata: 2 June, 2017, 02:04
www.oama.it
Figura 5: caratterizzazione del moto di inseguimento siderale del sistema FS2.
 Come si nota la periodicità ad un minuto è scomparsa mentre diviene evidente quella a 4 minuti, che prima era
sostanzialmente nascosta dal più grave difetto ad 1 minuto: giacché l'accoppiamento corona dentata/vite senza fine non
è stato modificato, si deduce che il vecchio sistema, motore sincrono + motoriduttore, era responsabile del
deterioramento delle prestazioni. L'ampiezza dell'errore periodico a 4 minuti è pari a circa 3 pixel che corrispondono a
poco più di 7 secondi di arco, un valore accettabile per un sistema amatoriale quale il nostro. Nel caso fortunato in cui si
realizzi una ripresa digitale (ancora impiegando 1 minuto di integrazione) proprio nella fase di inversione del "periodismo"
(cioè in corrispondenza di un minimo o di un massimo della sinusoide di figura 5) si ottengono fotografie caratterizzate
da una migliore puntiformità stellare, se confrontate con quella di figura 4. La figura 6 ritrae di nuovo M1, ripreso con una
posa di 1 minuto e adoperando il sistema FS2.
Figura 6: nebulosa M1 ripresa con un tempo di integrazione di 60 secondi (inseguimento FS2). L'ulteriore progresso che
si può conseguire con il sistema FS2 è la riduzione dell'errore periodico (P.E.C. "Periodic Error Correction"): è
possibile effettuare delle correzioni del moto di rotazione attorno all'asse polare, durante l'inseguimento siderale. In
questa fase, detta di apprendimento e che nel nostro caso ha una durata di 4 minuti, l'unità di controllo registra le
modifiche apportate; al termine dell'apprendimento l'unità attiva la funzione PEC, riproducendo esattamente le correzioni
introdotte. Se tali correzioni sono state effettuate in modo da controbilanciare quanto più possibile le fluttuazioni dovute
all'errore periodico, il risultato è un moto di inseguimento siderale privo di oscillazioni, anche su tempi di diversi minuti.
Figura 7: caratterizzazione del moto di inseguimento siderale del sistema FS2, con la funzione PEC attivata.
 La figura 7 mostra il risultato ottenuto: il moto presenta ancora delle oscillazioni, ma molto più contenute. E' ora
possibile realizzare riprese con tempi di integrazione di alcuni minuti, salvaguardando la puntiformità stellare e
guadagnando in magnitudine limite. La figura 8 mostra ancora la nebulosa del granchio fotografata con un tempo di posa
equivalente a 4 minuti. Da un confronto attento, si può osservare che il catalogo USNO (che classifica oggetti stellari
approssimativamente fino alla magnitudine V = 21) risulta battuto!
Figura 8: nebulosa M1 ripresa con un tempo di integrazione equivalente a 4 minuti, impiegando la funzione PEC. Stelle
più deboli della magnitudine V = 20 sono facilmente individuabili.
http://www.oama.it
Realizzata con Joomla!
Generata: 2 June, 2017, 02:04