Geodesia
Dal greco Γεωδαισια: divisione della Terra
Discipline collegate alla geodesia:
1. studio della forma del pianeta;
2. studio del campo di gravità del pianeta.
Misure geodetiche: misure legate e finalizzate a tali studi.
Geodesia da satellite:
metodi di posizionamento mediante osservazioni a satelliti terrestri
artificiali o a stelle e quasar;
finalizzati alla determinazione della posizione di punti appartenenti a
reti globali, continentali, regionali e locali per lo studio di:
Sistemi di Riferimento globali e geodinamica;
controllo regionale e locale del territorio;
rilievo locale per la cartografia e i SIT.
Metodi della geodesia da satellite:
1. Very Long Baseline Interferometry (VLBI),
2. Satellite Laser Ranging (SLR)
metodi storici per il controllo globale;
realizzati mediante stazioni permanenti di monumentazione e
manutenzione molto costose.
Nel corso verranno solo citati,
poiché non utilizzabili per applicazioni ingegneristiche.
Il GPS
Un metodo per la stima 3D della posizione di punti;
basato sulla ricezione di segnali
inviati da una costellazione di satelliti artificiali USA.
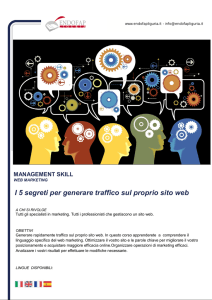
La misura
Si misura il tempo impiegato da onde elettromagnetiche, emesse da
un apparato a bordo del satellite, per raggiungere il punto R di cui si
vuole determinare la posizione.
Il tempo viene moltiplicato per la velocità di propagazione c del
segnale e si ottiene una stima di distanza ρ.
Le osservabili del GPS
Osservazioni di codice:
effettuate su codici binari,
sono le più semplici da acquisire (ricevitori più economici) e da
elaborare (tipicamente in tempo reale, dal ricevitore stesso);
sono le meno accurate (errori strumentali dal decimetro al metro).
Osservazioni di fase
effettuate su sinusoidi ad alta frequenza,
sono le più complesse da acquisire (ricevitori più costosi) e da
elaborare (software specialistico);
sono però le più accurate (errori strumentali inferiori al millimetro).
Il posizionamento assoluto (1/2)
Stima delle coordinate di un singolo ricevitore
mediante osservazioni a un certo numero (minimo 4) di satelliti.
Il posizionamento assoluto (2/2)
La stima può avvenire in tempo reale:
⇒ il metodo si presta ad applicazioni navigazionali.
L’utente necessita di un solo ricevitore,
la metodologia di rilievo è del tutto banale,
l’elaborazione dei dati è trasparente.
La precisione è scarsa:
⇒ circa 10 metri in navigazione,
⇒ 1-2 metri con occupazioni statiche prolungate sui punti.
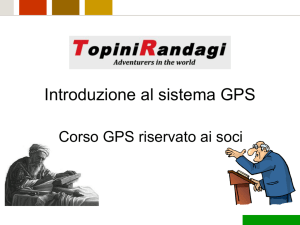
Gli errori nel posizionamento assoluto
Sono spazialmente correlati, ovvero simili per siti prossimi
Un esempio: mappa di disturbo ionosferico
Possono essere ridotti combinando opportunamente le osservazioni
di siti di misura “vicini”.
Il posizionamento relativo (1/3)
Due ricevitori effettuano osservazioni contemporanee ai medesimi
satelliti.
Le osservazioni vengono opportunamente combinate ed elaborate per
la stima della base (vettore 3D) fra i due ricevitori.
Il posizionamento relativo (2/3)
La precisione dipende:
⇒ dal tipo di ricevitori (tipo di osservabili acquisibili);
⇒ dalla distanza fra i ricevitori (da < 10 Km a >500 Km);
⇒ dal metodo di rilievo (durata dello stazionamento sui punti);
⇒ dall’approccio di elaborazione dei dati (tempo reale,
postprocessamento).
Si va da:
⇒ 1-2 metri (relativo sui codici in tempo reale):
navigazione di precisione,…
⇒ a meglio del centimetro (doppia frequenza, statico prolungato):
controllo di deformazioni,…
Note sul posizionamento relativo (3/3)
⇒ il metodo richiede l’utilizzo contemporaneo di almeno due
ricevitori;
⇒ uno di questi deve essere su un punto (stazione di riferimento)
di coordinate note a priori;
⇒ la metodologia di rilievo è meno complessa
delle tecniche topografiche tradizionali,
però l’elaborazione dei dati può essere complessa e onerosa.
L’approccio di rete al posizionamento relativo
Con più stazioni di riferimento:
⇒ aumentano le precisioni di stima:
ovvero pari precisione con tempi di rilievo minori;
⇒ però aumenta anche la complessità nelle elaborazioni.
L’elaborazione dei dati GPS
A differenza degli altri metodi topografici classici
l’esecuzione di rilievi GPS non comporta difficoltà operative.
Viceversa è strategico il metodo di elaborazione dei dati:
infatti nel processo di elaborazione si devono:
modellizzare e rimuovere i disturbi sui segnali,
eliminare eventuali outlier nelle osservazioni,
infine stimare le incognite di interesse:
la posizione del ricevitore nel posizionamento assoluto,
le tre componenti della base nel posizionamento relativo.
La compensazione di reti GPS
Data una rete di punti dei quali si vogliano determinare
le posizioni è possibile
misurare più coordinate e basi di quelle strettamente necessarie.
Si effettua quindi la compensazione della rete mediante
Minimi Quadrati
L’inquadramento di reti GPS
Il GPS fornisce la posizione dei caposaldi in uno specifico sistema di
riferimento; effettuati rilievo e compensazione di una rete GPS
è spesso necessario (ad esempio a scopi cartografici)
riportare i risultati al sistema di riferimento nazionale.
Tale problematica prende il nome di inquadramento planoaltimetrico
della rete.
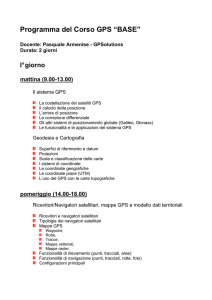
Esempi di precisioni e applicazioni del GPS
Tipo di posizionamento
Posizionamento assoluto
in tempo reale
Posizionamento
assoluto statico
Posizionamento
relativo cinematico
in tempo reale o con
postelaborazione.
Posizionamento
relativo statico su
reti locali o regionali
Reti continentali di
stazioni permanenti
Caratteristiche di misura
Un ricevitore,
risultati istantanei
Un ricevitore,
periodi prolungati di
misura
Due o più ricevitori,
uno di riferimento, gli altri
in moto su punti di
posizione incognita
Precisioni
Esempi di applicazioni
10-20 m
Navigazione e diporto
1-5 m.
Poco utilizzato
0.2 – 2 m
Navigazione di precisione
a seconda del tipo di
Rilievo cartografico
osservazione (codici o
fasi)
Da subcentimetrica a
Due o più ricevitori,
uno di riferimento, gli altri decimetrica a seconda del Controllo di deformazioni
Reti di inquadramento
tempo di occupazione e
occupano staticamente
Rilievo catastale
dello schema di rete
punti di posizione
incognita
Controllo geodinamico
Stime di posizioni
Ricevitori in misura
continua statica e calcolo reciproche con precisioni Definizione dei Sistemi di
Riferimento globali.
subcentimetriche
di soluzioni settimanali
Gli argomenti del corso
Introduzione al GPS
I Minimi Quadrati per i dati GPS e le reti geodetiche
I sistemi di riferimento
Il sistema GPS
Il segnale
Le osservazioni e i relativi disturbi
Il posizionamento assoluto
Il posizionamento relativo
L’elaborazione dei dati
La compensazione e l’inquadramento della rete
Le esercitazioni
MQ non lineari
Trasformazioni di Sistemi di Riferimento
Rimozione dai dati dei disturbi atmosferici
Posizionamento assoluto
Posizionamento relativo
Identificazione e rimozione dei cycle slips
Stima e fissaggio delle ambiguità iniziali
Stima di basi mediante misure di fase
Compensazione di rete
Inquadramento di rete
Il laboratorio
Prove di utilizzo di ricevitori
Progettazione di un rilievo su rete
Rilievo di una rete GPS
Elaborazione di dati GPS
Compensazione di reti GPS
Inquadramento di reti GPS
Trasformazioni di Sistemi di Riferimento