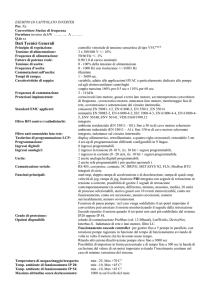
Rimor
INVERTER per motori asincroni trifase a induzione
compatti multifunzione
PWM vettoriali ad alte prestazioni
serie VFR
serie VFR 1081 per alimentazione 380/460V trifase 50/60Hz
serie VFR 1080 per alimentazione 380/460V trifase 50/60Hz
Manuale di istruzione
INTRODUZIONE
Grazie per aver scelto il convertitore di frequenza VFR 1081
Questa serie è progettata sulla base dell'esperienza di RIMOR nella produzione
professionale e nella vendita di convertitori di frequenza utilizzati in macchine a uso
generale, ventilatori / pompe a ingranaggi, ingranaggi a media frequenza e macchine a
carico pesante.
Questo prodotto adotta l’avanzata tecnologia di controllo vettoriale sensorless
combinata con l'applicazione delle caratteristiche dei convertitori di frequenza in Cina,
al fine di ottenere controllo V / f ad alte prestazioni (compensazione del dead-time +
aumento coppia automatico + compensazione di scorrimento), vettori di controllo
sensorless ad alte prestazioni e controllo della velocità vettoriale sensorless ad alte
prestazioni.
Il presente manuale utente comprende gli usi generali e gli usi speciali della serie VFR
1081 /VFR 1008. Gli usi generali comprendono F, G, M e H; gli usi speciali
comprendono S, T e Z:
F: CARICO LEGGERO
G:CARICO STANDARD
M:CARICO MEDIO
H:CARICO PESANTE
S:MACCHINA PER USO TESSILE
T:MACCHINA PER SOLLEVAMENTO
Z:MACCHINA A INIEZIONE
Questo manuale fornisce agli utenti istruzioni di supporto relative all’installazione,
al funzionamento, all’impostazione dei parametri, alla diagnosi dei guasti, alla
manutenzione e alle misure di sicurezza durante il funzionamento. Si prega di leggere
attentamente il seguente manuale prima dell'installazione al fine di garantire una
corretta installazione e il corretto funzionamento del convertitore di frequenza.
In caso di dubbi durante l’utilizzo si prega di contattare i nostri distributori o di
rivolgersi direttamente alla nostra azienda. Il nostro staff tecnico sarà felice di offrire
supporto.
Si prega di tenere il presente manuale d’uso in buone condizioni e di conservarlo in un
luogo sicuro perché potrà essere utile per eseguire interventi di riparazione, di
manutenzione e le altre applicazioni in futuro. Se durante il periodo di garanzia si
verifica un malfunzionamento, si prega di compilare la scheda della garanzia e di
inviarla via fax al rivenditore o all'azienda.
Durante le fasi di miglioramento del prodotto, le informazioni contenute nel
presente manuale possono essere soggette a modifiche senza preavviso. Per ottenere
materiali aggiornati, si prega di visitare il nostro sito web.
Per informazioni sugli altri prodotti RIMOR, si prega di visitate il nostro sito web:
http://www.e- rimor.com
INDICE
INTRODUZIONE-------------------------------------------------------------------------------1
INDICE-------------------------------------------------------------------------------------------2
CAPITOLO 1 ISTRUZIONI DI SICUREZZA E CONTROLLO ------------------------3
CAPITOLO 2 INSTALLAZIONE E CIRCUITO DI STANDBY-----------------------5
CAPITOLO 3 PANNELLO DI CONTROLLO--------------------------------------------17
CAPITOLO 4 TEST DI FUNZIONAMENTO----------------------------------------------26
CAPITOLO 5 DESCRIZIONE PARAMETRI DELLE FUNZIONI---------------------29
CAPITOLO 6 DIAGNOSI ANOMALIE E RELATIVE SOLUZIONI-----------------121
CAPITOLO 7 SPECIFICHE STANDARD--------------------------------------------------125
CAPITOLO 8 REVISIONE E MANUTENZIONE----------------------------------------138
CAPITOLO 9 OPZIONI-----------------------------------------------------------------------141
CAPITOLO 10 CONDIZIONI GENERALI DI VENDITA------------------------------145
APPENDICE 1
PROTOCOLLO DI MANUTENZIONE LINEA SERIALE RS485--------------------148
APPENDICE 2
ISTRUZIONI RELATIVE ALLA FUNZIONE DI COLLEGAMENTO
PROPORZIONALE-----------------------------------------------------------------------------160
APPENDICE 3
ISTRZIONI RELATIVE ALL’ UTILIZZO DELLA SCHEDA PG --------------------165
APPENDICE 4
ISTRUZIONI RELATIVE ALLA FUNZIONE DI ESTENSIO-----------------------166
CAPITOLO 1 ISTRUZIONI DI SICUREZZA E CONTROLLO I convertitori di frequenza RIMOR VFR 1081 sono stati testati e controllati prima
di essere messi sul mercato. Prima di disimballare il prodotto, si prega di verificare che
l'imballo non abbia subito danni visibili durante il trasporto e che le specifiche e il tipo
di prodotto corrispondano all'ordine fatto. Si prega di contattare il fornitore dei prodotti
RIMOR in caso di problemi.
1-1 ISPEZIONE DOPO IL DISIMBALLAGGIO
※ Controllare che il contenuto della confezione comprenda un convertitore di
potenza VFR 10810/8100, un manuale utente e una copia della garanzia.
※ Controllare la targhetta presente sul lato del convertitore di frequenza per
accertarsi che l'apparecchio corrisponda al tipo effettivamente ordinato.
1
1-2. Normative e rispondenze:
marcatura CE
direttiva EMC 2 ( compatibilità elettromagnetica )
Direttiva Bassa Tensione 73/23/CEE – EN50178
rispondenza RoHS
1-3. Precauzioni per la sicurezza
Leggere con attenzione il presente manuale di istruzione al fine di un corretto impiego dell’inverter e per la prevenzione
di lesioni e danni all’utente, alle persone e alle cose nella zona di installazione e per le modalità di impiego.
conseguenza danni alle cose nell'area di utilizzo. E’ necessario seguire tutte le segnalazioni e le avvertenze indicate.
Limiti di impiego
L'inverter oggetto del presente Manuale è adatto solo per la regolazione di velocità di motori trifase ad
induzione, per uso industriale.
Precauzioni per la sicurezza
L’inverter non deve essere utilizzato in applicazioni o dispositivi che con il loro cattivo funzionamente possono causare
pericoli a persone o che per un errore di funzionamento posono rappresenatare rischio diretto per le persone.
(ad es. sistemi di controllo in campo nucleare, sistemi di controllo a bordo di velivoli, sistemi di
controllo del traffico, sistemi di sopravvivenza , dispositivi di sicurezza, ecc.).
In caso di dubbi al riguardo contattare il Fornitore. In tutti i casi nei quali errori di funzionamento o guasti dell’inverter
potrebbero causare incidenti alle persone o danni alle cose, è necessario predisporre dispositivi di sicurezza sulla
macchina a bordo della quale viene installato l’inverter.
Questo prodotto è stato costruito in base ai controlli di qualità più rigorosi ma, nel caso in cui debba
essere utilizzato in attrezzature critiche, per esempio attrezzature nelle quali errori nel sistema di
gestione di segnali di malfunzionamento potrebbero causare incidenti gravi, è necessario installare
dispositivi di sicurezza sull'attrezzatura.
L’utilizzop di questo inverter per carichi diversi da motori trifase ad induzione può causare incidenti o danni. Evitare l’uso
in applicazione diverse dalla alimentazione e regolazione di motori trifase ad
Attenzione Pericolo
Non rimuovere mai le protezioni, smontare l’inverter o tentare delle riparazioni o delle modifiche anche quando questo è staccato
dalla rete di alimentazione – rischio di fulminazioni, incendio o lesioni -.
Per le riparazioni contattare il Servizio di Assistenza Rimor.
Non rimuovere mai il coperchio di protezione della unità o delle morsettiere sia di potenza che ausiliarie quando
l’inverter è alimentato. In caso di montaggio in quadro elettrico la porta di questo deve sempre essere chiusa quando
l’inverter è alimentato – rischio di fulminazione elettrica – presenza di parti ad alta tensione.
Evitare il contatto con parti interne o con parti in movimento ( ventole interne ) o con le morsettiere o le aperture di
ingresso cavi – rischio di fulminazioni elettriche o altre lesioni.
All’interno dell’inverter non devono essere lasciati residui di cavi di cablaggio o altri oggetti estranei – rischio di
fulminazioni elettriche o incendi.
Non premettere che acqua o altri liquidi vengano a contatto dell’inverter o vi penetrino – rischio di fulminazioni elettriche o
incendio
Prima di alimentare l’inverter assicurasi che siano state montate le protezioni e il coperchio e che la porta del quadro in
cui è instalalto sia chiusa – rischio di fulminazioni elettriche o lesioni alle persone.
Se dall’inverter si nota uscita di fumo o si sentono odori o rumori anomali, disconnettere immediamente la alimentazione e
contattare il Servizio di Assistenza Rimor – rischio di incendio.
Se l’invetrter deve essere messo fuori servizio per lunghi periodi di empo, scollegare sempre la alimentazione – rischio di
penetrazione di polvere, acqua o altro – rischio di funzionamento anomalo o di incendio.
ITALIANO
Attenzione Pericolo di ustione
Non toccare le alette del dissipatore i resistori di frenatura o i dispositivi esterni ( fitri EMI, induttanze, reattanze, ecc.)
Questi dispositivi possono essere molti caldi e causare ustioni anche gravi se toccati.
ITALIANO
2
1-4. Ulteriori precauzioni di Sicurezza per l’Operatore
※
Non collegare mai l’alimentazione A.C. ai terminali d’uscita (U, V, W)
dell’inverter
※
Fissare e bloccare il pannello anteriore prima di dare tensione per evitare
pericoli causati dalla presenza di condensatori carichi o da altri
componenti in tensione all'interno dell'inverter.
Dopo aver dato l’alimentazione, non eseguire cablaggi o controlli ecc…
※
※
※
※
※
※
※
Non toccare le schede del circuito o le sue parti o componenti all’interno
dell’inverter quando è alimentato, in modo da evitare il pericolo di shock
elettrico.
Se l’alimentazione è spenta, non toccare il PCB o altre parti all’interno
dell’inverter prima di 5 minuti dopo che la spia di segnalazione di
condensatori carichi sulla tastiera si è spenta.Controllare con un tester che
tute le capacità siano scariche prima di accedere ai componenti inteni di
qualsiasi tipo – rischio di shock elettrico.
L’elettricità statica nel corpo umano può causare gravi danni al transistor
ad effetto campo MOS nell’inverter. Si prega di tenere le mani lontane dal
PCB, IGBT e altre parti interne prima di aver preso delle precauzioni per
evitare l’elettricità statica. Altrimenti si potrebbero avere dei guasti.
Durante l’uso, il terminale di messa a terra (E o ) dell’inverter deve
essere collegato correttamente alla terra secondo le specifiche di
sicurezza elettrica nazionali e altri standard applicabili.
Si prega di non spegnere l’unità togliendo l’alimentazione. Agire sul
contatto di arresto e togliere l’alimentazione solo dopo che il motore si è
fermato.
Seguire lo standard CE inserendo il filtro EMI.
Solo il personale addetto è autorizzato all’utilizzo della presente
unità. Tale personale è tenuto a leggere l’intero manuale, relativo a
sicurezza, installazione, messa in opera e manutenzione, prima
dell’utilizzo dell’unità stessa. L’utilizzo sicuro della presente unità
dipende da un corretto trasporto, installazione, messa in opera e
manutenzione.
1-5. Avvertenze per lo smaltimento
L’inverter deve essere smaltito come rifiuto industriale pericoloso, secondo i
Regolamenti e le Normative locali
Attenzione
Rischio di esplosione in caso di incenerimento per la presenza di liquido
contenuto nei condensatori che si espande con il calore.
Rischio di emissione di sostanze pericolose in caso di invenerimento della
plastica presente nella struttura
1-6. Conformità alle Direttive
3
NOTE SUL MARCHIO CE
Il marchio CE assicura che prodotto è con forme alle Direttive per la circolazione
all’interno della Comunità Europea.
Gli inverter VFR hanno il marchio CE conforme alla Direttiva Bassa Tensione.
I convertitori di frequenza sono soggetti alle seguenti Direttive Europee
Direttiva bassa tensione
Direttiva 2006/95/CE
L’inverter è marchiato CE in accordo a quanto previsto dallo standard EN50178
( equipaggiamenti elettrici destinati ad installazioni di potenza) – livello 2-5.2.15.2 – classe
sovratensione 3
Direttiva compatibilità elettromagnetica
Direttiva EMC 2004/108/CE ( compatibilità elettromagnetica ) Norma EN61800-3
Il marchio CE apposto sull’inverter, può essere valido anche per la direttiva EMC a
condizione che la sua installazione venga eseguita correttamente e siano presenti i
dispositivi necessari (ad esempio eventuali filtri EMI o altri apparati) per la rispondenza
alla compatibilità elettromagnetica della macchina finita.
Il convertitore di frequenza è utilizzato esclusivamente come componente di impianto
inserito in un sistema tecnologico ( quadro elettrico, macchinario o impianto elettrico) più
complesso.
E’ compito del Costruttore e dell’Installatore del sistema finito, verificare e garantire la
rispondenza del sistema alle Norme EMC.
Direttiva macchine
Direttiva 2006/42/CE del 17 maggio 2006 ( direttiva macchine)
Sono esclusi dal campo di applicazione della presente Direttiva:…(omissis) k) i prodotti
elettrici ed elettronici che rientrano nelle categorie seguenti, purché siano oggetto della
direttiva 72/23/CEE del Consiglio, del 19 febbraio 1973, concernente il ravvicinamento
delle legislazioni degli Stati membri relative al materiale elettrico destinato ad essere
adoperato entro taluni limiti di tensione (3): …( omissis ) — apparecchiature di
collegamento e di controllo a bassa tensione.
Gli inverter sono quindi esclusi dalla presente direttiva e sono soggetti alla Direttiva Bassa
Tensione.
L’inverter può essere considerato una quasi macchina.
E’ compito del Utilizzatore che incorpora l’inverter in una macchina o in una quasi
macchina, garantire la rispondenza del prodotto finale alla presente Direttiva ed emettere
la relativa Dichiarazione di Conformità.
L’inverter quindi non deve essere messo in servizio finché la macchina o la quasi
macchina in cui è incorporato, non sono stati dichiarati conformi, se del caso, alle
disposizioni della presente Direttiva.
Torino 09/10/2010
Rimor srl
4
NOTE SULLE EMISSIONI EMC
Gli inverter della serie VFR sono stati sottoposti a prove presso Laboratorio Italiano
secondo la direttiva 2006/95/CE per quanto riguarda:
Emissioni secondo la norma EN61800-3
emissioni condotte nel campo 150kHz – 30 MHz
emissioni irradiate nel campo 30MHz – 1 GHz
Immunità secondo la norma EN61800-3
Immunità alle scariche elettrostatiche ( involucro)
Immunità irradiata ( involucro)
Immunità ai burst ( porta alimentazione)
Immunità alla RF ( porta alimentazione)
EN 61000-4-2
EN 61000-4-3
EN 61000-4-4
EN 61000-4-6
Il rapporto di prova e le note del Costruttore sono disponibili a richiesta.
I limiti delle emissioni condotte sono indicate nella EN55011 e sono definiti i seguenti
ambienti di installazione:
classe – ambienti civili e commerciali –Norma EN/IEC61000-6-3
classe A gruppo 1– ambiente industriale - Norma EN/IEC61000-6-4
Gli inverter della serie VFR sono adeguati per impiego negli ambienti sopra indicati.
NOTE SULLE INTERFERENZE
Le interferenze sono generate nell’impianto dall’inverter, dai cavi di collegamento e dal
motore elettrico.I cavi tra inverter e motore devono essere il più corti possibile per ridurre i
valori di interferenza. L’uso di cavi schermati tra inverter e motore riduce la interferenza
irradiata, ma aumenta quella condotta.
CONCLUSIONE
I requisiti e la rispondenza alla compatibilità elettromagnetica EMC dipendono da come
l’inverter viene usato e installato e la verifica finale delle Compatibilità Elettromagnetica
EMC è a carico del Costruttore e dell’installatore della macchina o impianto in cui
l’inverter è installato.
NOTE SUL COMPORTAMENTO DEL MOTORE
La commutazione degli IGBT a frequenza elevata produce delle derivate di tensione
dV/dt a fronte molto ripido che sollecitano in modo anomalo l’isolamento del motore
e ne accelerano l’invecchiamento.
La forma di onda sinusoidale distorta che si presenta sul motore può indurre
correnti ad alta frequenza sul rotore che provocano la formazione di correnti
parassite tra i due supporti.
La Rimor srl è a disposizione per orientare i propri Clienti ad un uso e installazione
corretta degli inverter VFR e per consigliare la eventuale aggiunta di accessori
adeguati.
5
CAPITOLO2
INSTALLAZIONE E CIRCUITO DI STANDBY
2-1
CONDIZIONI GENERALI DI UTILIZZO
1.
2.
3.
4.
5.
6.
7.
Temperatura ambiente consigliata -10ºC~40ºC – temperatura
immagazzinamento -20°C//+65°C
Evitare interferenze elettromagnetiche e mantenere l'unità lontana da fonti di
interferenza.
Evitare di far cadere acqua, vapore, polvere, cipria, fibre di cotone o polveri
dimetallo all'interno dell'unità.
Evitare di far cadere olio, sale e gas corrosivi all'interno dell'unità.
Evitare vibrazioni.
Evitare alte temperature e umidità, evitare che l'unità si bagni a causa di
pioggia, con umidità inferiore al 95% RH (senza condensato).
E' vietato l'uso in ambienti pericolosi in cui sono presenti gas, liquidi o solidi,
infiammabili, combustibili o esplosivi.
uscita
150MM
2-2 INSTALLAZIONE
Il convertitore deve essere installato sul gancio della parete di una sala interna con
adeguata ventilazione e in modo che sia presente spazio sufficiente tra l'unità e gli
oggetti adiacenti o gli ammortizzatori (pareti) che lo circondano, come mostrato nella
seguente figura:
ARIA
uscita
℃
%
REV
FWD
ALARM
HZ
S
A
V
DIGITAL OPERATOR
STOP
RESET
RUN
PRG
50MM
ESC
DISPL
SET
JP-10
50MM
CA U TION
ingresso
150MM
High voltage inside.
Perform parts replacement after discharge
is finished.
Confirm the output or control wires are not
grounded.
Refer to the operation manual when adjust
or inspect.
ingresso
2-3
CABLAGGIO
Il cablaggio del convertitore di frequenza comprende due parti: il circuito
principale e il circuito di controllo. L'utente deve garantire connessioni corrette secondo
il seguente schema di collegamento.
6
2-3-1 SCHEMA DI COLLEGAMENTO VFR 1080
1. Schema di collegamento 11kW~ 15kW (8N3)
VFR 1080
7
2. Schema di collegamento 18.5kW~ 355kW
VFR 1080
8
2-3-2 SCHEMA DI COLLEGAMENTO VFR 1081
1. Schema di collegamento 11KW e inferiori
VFR 1081
9
2-4 MORSETTI DEL CIRCUITO PRINCIPALE (TIPO G)
2-4-1 MORSETTI DEL CIRCUITO PRINCIPALE MODELLO VFR 1080
1.MORSETTI DEL CIRCUITO PRINCIPALE 11kW~15kW(380V)
2.MORSETTI DEL CIRCUITO PRINCIPALE 18.5~22kW(380V)
3.MORSETTI DEL CIRCUITO PRINCIPALE 30~160kW(380V)
Attenzione: l’impostazione standard DC+1 / DC+ 2 è in corto, se è
impiegata l'unità di resistenza esterna, si prega di scollegarlo e collegarlo di
nuovo.
10
4. MORSETTI DEL CIRCUITO PRINCIPALE 187~355kW(380V)
2-4-2 MORSETTI DEL CIRCUITO PRINCIPALE DEL MODELLO VFR 1081
1. MORSETTI DEL CIRCUITO PRINCIPALE INFERIORE A 7.5kW
Attenzione: le seguenti categorie kW si riferiscono al convertitore di tipo G.
2-4-3 FUNZIONE DEI MORSETTI DEL CIRCUITO PRINCIPALE
Morsetto
Descrizione
Istruzioni
R/L1
Potenza d'ingresso
Collegamento a corrente trifase,
S/L2
del convertitore
monofase R e T.
T/L3
morsetto di messa a
/E
Collegamento messa a terra
terra
Morsetto di
B1,B2
Collegamento alla resistenza di frenatura
connessione
resistenza di frenatura
U/T1
Morsetto di uscita
Collegamento al motore trifase
V/T2
W/T3
Morsetto di uscita DC
Collegamento alla resistenza di frenatura
DC+1,DCbus
DC+1,
Resistenza CC
Collegamento alla resistenza CC
DC+2
2-5
MORSETTI DEL CIRCUITO DI CONTROLLO
11
2-5-1 FUNZIONE DEI MORSETTI DEL CIRCUITO DI CONTROLLO
Tipo
Segnale
d'ingresso
Alimentazio
ne assistita
Segnale di
uscita
Morsetto
Descrizioe
DI1
Morsetto
d'ingresso DI1
DI2
Morsetto
d'ingresso DI2
DI3
Morsetto
d'ingresso DI3
DI4
Morsetto
d'ingresso DI4
DI5
Morsetto
d'ingresso DI5
DI6
Morsetto
d'ingresso DI6
DI7
Morsetto
d'ingresso DI7
DI8
Morsetto
d'ingresso DI8
Funzione
Morsetto d'ingresso multifunzione. Per dettagli fare riferimento a o36~o46. L'inserimento di una polarità valida può essere comandato con o47. La modalità drive DI1~DI4 può essere comandata con JP4 Superiore a 11KW Le modalità drive DI5~DI8 possono
essere controllate dal terminale di uscita
PLC
D16 può essere utilizzato come ingresso a
impulsi digitali.
Inferiore a 11KW:
Le modalità di azionamento DI5~DI6
possono essere controllate dal terminale di
uscita PLC
DI6 si riferisce all'ingresso di impulsi
digitali.
Il PLC controlla le modalità drive DI5~
DI8.
Drive di drenaggio: PLC collegato a
24VDC o a sorgenti di potenza esterne
Drive di origine: PLC collegato a COM.
PLC
Morsetto di
controllo PLC
24V
Morsetto potenza
positiva
COM
Morsetto comune
SPA/COM
Segnale d'uscita 1
SPB/COM
Segnale d'uscita 2
12
Potenza in uscita massima 24V/200mA, in
nessuna circostanza è possibile collegare in
corto COM e GND.
In fase di funzionamento, segnale di uscita
del collettore aperto (24VDC/150mA)
In fase di funzionamento, segnale di uscita
del collettore aperto (24VDC/150mA)
Il terminale comune è COM, la funzione di
uscita è impostata da Ø21, Ø22
uscita a impu SPA e SPB sono in grado di
fornire funzione di lsi digitali ad alta
velocità impostando o61~o64. Dopo
l'impostazione della funzione, si ha un
effetto di rialimentazione del
TA1/TB1/TC1
Segnale d'uscita 3
TA1-TC1 regolarmente aperto, TB1-TC1
regolarmente chiuso, la funzione di uscita è
impostata da o23
TA2/TB2/TC2
Segnale d'uscita 4
TA2-TC2 regolarmente aperto, TB2-TC2
regolarmente chiuso, la funzione di uscita è
impostata da o24
+10V,GND
Alimentazione
elettrica
+10V,50mA,GND
Segnale tensione
di ingresso
JP5 scollegato JP3 1-2:-10V~+10V
JP5scollegato/JP3 2-3:0~10V
JP5in corto 0~20mA regolabile a intervallo
o00/o01 impostazione della tensione
d'ingresso/intervallo di corrente
o06/o07 impostazione del segnale di
ingresso corrispondente al valore stabilito
Segnale tensione
di uscita
JP6 scollegato:0~10V
JP6in corto:0~20mA regolabile a
intervallo
o02/o03 impostazione della tensione
d'ingresso/intervallo di corrente
o08/o09 impostazione del segnale di
ingresso corrispondente al valore stabilito
Segnale di
ingresso
retroazione di
corrente
JP7 scollegato:0~10V
JP7in corto:0~20mA regolabile a
intervallo
o04/o05 impostazione della tensione
d'ingresso/intervallo di corrente
o10/o11 impostazione del segnale di
ingresso corrispondente al valore stabilito
Uscita analogia
multifunzione 1
JP1 1-2:0~20mA
JP1 2-3:0~10VDC
Impostazione o15 delle funzioni analogiche
dell’uscita analogica
Impostazione o17/o18 del campo del
segnale d’uscita
Uscita analogia
multifunzione 2
JP2 1-2:0~20mA
JP2 2-3:0~10VDC
Impostazione o16 delle funzioni analogiche
dell’uscita analogica
Impostazione o19/o20 del campo del
segnale d’uscita
AI1
AI2
Segnale di
ingresso
analogico
AI3
DA1
DA2
13
2-5-2 MORSETTI DEL CIRCUITO DI CONTROLLO
1. MORSETTI DEL CIRCUITO DI CONTROLLO 8KLCB
2. MORSETTI DEL CIRCUITO DI CONTROLLO 8KSCB
2-6
ISTRUZIONI DI SICUREZZA DEL CABLAGGIO
※ Non installare dispositivi di condensazione o dispositivi di assorbentimento RC tra
i morsetti di uscita U, V, W del convertitore di frequenza. Durante la sostituzione del
motore, è necessario scollegare l’alimentazione d’ingresso del convertiore.
※ Durante il cablaggio, non far cadere scarti di gomma piuma o polvere nel
convertitore di frequenza, diversamente il convertitore presenterà anomalie.
※ Il motore o l’alimentazione possono essere accesi / spenti solo dopo che il
convertitore ha terminato l’uscita.
※ Per ridurre al minimo l'effetto di interferenze elettromagnetiche, un dispositivo di
assorbimento dei picchi deve essere installato se contatori, relè elettromagnetici, ecc.
sono utilizzati nelle vicinanze del convertitore di frequenza.
※ Per il controllo esterno del convertitore deve essere utilizzato un dispositivo di
isolamento delle linee di controllo o un cavo schermato.
※ Un cavo schermato deve essere utilizzato come segnale di collegamento della linea
per il comando in ingresso. Il cavo deve essere collocato separatamente, preferibilmente
lontano dal cablaggio del circuito principale.
※ Quando la frequenza portante è inferiore a 3kHz, la distanza tra il convertitore e il
motore non deve essere maggiore a 50 metri (massimo). Quando si superano i 4kHz,
questa distanza deve essere ridotta. Il cavo per questa connessione deve essere collocato
in una canalina di metallo.
※ Se il convertitore di frequenza è dotato di dispositivi periferici (come filtro,
reattore), misurare prima la resistenza d'isolamento a terra con un metro 1000V
megaohm e garantire che il valore della resistenza non sia inferiore a 4MΩ.
※ Se il convertitore di frequenza deve essere avviato frequentemente, non spegnere la
sua alimentazione. L'operatore deve avviare o arrestare il convertitore utilizzando il
morsetto di controllo, il tastierino o la linea seriale RS485, al fine di evitare danni al
ponte raddrizzatore.
14
※ Non collegare l'alimentazione di ingresso CA ai morsetti di uscita U, V, W del
convertitore di frequenza.
※ Al fine di prevenire incidenti imprevisti, il morsetto di messa a terra E ( )
deve essere posizionato a terra in modo sicuro (la resistenza di terra deve essere
inferiore a 100Ω). La dimensione del cavo deve essere superiore alla metà del suddetto
cavo per evitare che si verifichi dispersione di corrente.
※ Per il cablaggio del circuito principale, fare riferimento alla normativa nazionale in
merito.
※ La capacità del motore deve essere uguale o inferiore a quella del convertitore.
※ Soddisfare le specifiche del MCCB, del cavo elettrico e del contraente.
※ Specifiche interruttori, cavi e contattori.
Linea di
Contattore corrente
ingresso/linea di
nominale di
Interruttore
uscita
Modello
esercizio A (tensione
(A)
(cavi in rame)
380V o 220V)
mm2
VFR 1008 40P75G3
10A
1.5
10
VFR 1008 401P5G3
16A
1.5
10
VFR 1008 402P2G3
16A
2.5
10
VFR 1008 4004G3
25A
2.5
16
VFR 1008 405P5G3
25A
4
16
VFR 1008 407P5G3
40A
4
25
VFR 1008 4011G32
63A
6
32
VFR 1008 4015G3
63A
6
50
VFR 1008 4018G3
100A
10
63
VFR 1008 4022G3
100A
10
80
VFR 1008 4030G3
125A
16
95
VFR 1008 4037G3
160A
25
120
VFR 1008 4045G3
200A
35
135
VFR 1008 4055G3
250A
35
170
VFR 1008 4075G3
315A
70
230
VFR 1008 4093G3
400A
70
280
VFR 1008 4110G3
400A
95
315
VFR 1008 4132G3
400A
95
380
VFR 1008 4160G3
630A
150
450
VFR 1008 4187G3
630A
185
500
VFR 1008 4200G3
630A
240
580
VFR 1008 4220G3
800A
150*2
630
15
VFR 1008 4250G3
800A
150*2
700
VFR 1008 4280G3
1000A
185*2
780
VFR 1008 4315G3
1200A
240*2
900
VFR 1008 4355G3
1280A
240*2
960
VFR 1008 4400G3
1380A
185*3
1035
VFR 1008 4500G3
1720A
185*3
1290
2-7 CIRCUITO DI STANDBY
Al fine di evitare che durante un guasto o un malfunzionamento del convertitore si
verifichino gravi perdite o incidenti, si prega di inserire il circuito di standby sottostante.
Attenzione: confermare e verificare il funzionamento del circuito di standby e le sue
caratteristiche al fine di assicurarsi che la frequenza e la conversione di frequenza siano
concordi.
Trifase
Convertitore di
frequenza
Blocco Relè
Alimentazione AC
INVERTER
1080
16
CAPITOLO 3
PANNELLO DI CONTROLLO
3-1 PANNELLO DI CONTROLLO
3-1-1 DESCRIZIONE DELLE SPECIFICHE E DELLE FUNZIONI DEL
PANNELLO JPxE8000(standard)
Display numerico di selezione 1:
Indicatore luminoso di Indicatore luminoso diIndicatore luminoso diIndicatore luminoso prompt composizione
delle unità
Visualizza il valore corrispondente avanzamento
avanzamento
allarme
* Composto da tre indicatori luminosi che si
* ON: inversione
alla funzione in condizione di ricerca
* ON: inversione
* ON: anomalia
trovano sul lato destro del digitale a LED.
*
Visualizza il codice di errore in
OFF: non inversione * OFF: non inversione* OFF: normale
* FLASH: in fase di
condizione di errore
* FLASH: in fase di *FLASH:l'anomalia Visualizza lo stato corrispondente alle sei
* Visualizza l'oggetto stabilito dalla avanzamento in
inversione in
precedente non è unità, indica le unità dei parametri
visualizzati precedentemente dalLED.
selezione del monitor A00 durante il accelerazione
accelerazione
stataconfermata
* i rapporti corriposndenti sono illustrati
funzionamento
*
*
di seguito:
UNIT
FWD
REV
ALARM
S
+
%
A
s
-
Selezione del parametro
/tasto maiuscole
- selezione del parametro
- bit di modifica dei valori
di funzione
PRG
MF1
MF2
FWD
°C
S
灭
V
V
%
亮
A
°C
S
V
+
A
°C
S
ENTER
%
%
A
-
V
A
Hz
Hz
%
V
Display numerico di selezione 2
V
UNIT
UNIT
Hz
°C
S
V
Hz
UNIT
℃
A
°C
S
V
无单位
Hz
A
°C
S
V
Hz
%
%
A
°C
UNIT
Hz
Hz
%
%
A
Indicatore luminoso del segnale positivo
e negativo (solo per la selezione del
monitor 1)
UNIT
UNIT
Hz
DIGITAL PANEL
S
°C
Tasto ENTER
* Ha la stessa funzione di PRG/tasto >>.
Fare riferimento alle note esplicative del tasto PRG
/
* Non valido nello stato di monitoraggio
Unità periferica/ JOG
Tasto multi-funzione MF1/MF2
*in fase di verifica, i valori della
- MF1 definisce la funzione del tasto mediante
funzione sono
il parametro A43
incrementati o decrementati
- MF2 definisce la funzione del tasto mediante SET
ESC
STOP/RESET
* in fase di modifica, i valori della funzione
il parametro A44
sono
-A43/A44=0MF definisce la funzione di
incrementi o decrementi
aumento
* in fase di monitoraggio, la frequenza
-A43/A44=1MF definisce la funzione di
impostata è aumentata o diminuita
diminuzione
-A43/A44=2MF definisce la funzione di
arresto libero
Tasto di avanzamento
-A43/A44=3MF definisce la funzione di
* il convertitore è in marcia di
inversione
avanzamento
-A43/A44=4MF definisce la funzione di
Opzione accelerazione /tasti di
puntualità dinamica
Tasto Esci
impostazione dei parametri
-A43/A44=5MF definisce la funzione anti-jog* in selezione del parametro, premere * Uscire
-A43/A44=6MF definisce la funzione jog
SET e ruotare JOG, la posizione del dalla revisione del parametro
Tasto Reset / Stop
-A43/A44=7MF definisce il comando
* Ritornare alla visualizzazione
parametro arriva a 10
* Arresto del convertitore
SOPRA
* salvataggio del valore modificato menu dal sottomenù o al menu di * Eccezione Reset
-A43/A44=8MF definisce il comando UP * modifica dell'oggetto in fase
funzione
* Conferma di errore
-A43/A44=9MF definisce il comando
* Uscire dallo stato default
monitoraggio
DOWN
17
3-1-2 DESCRIZIONE DELLE SPECIFICHE E DELLE FUNZIONI DEL
PANNELLO JPxC8000(opzionale)
Display numerico di selezione 1:
* Visualizza il valore corrispondente
alla funzione in condizione di ricerca
* Visualizza il codice di errore in
condizione di errore
* Visualizza l'oggetto stabilito dalla
selezione del monitor A00 durante il
funzionamento
Indicatore luminoso di
avanzamento
* ON: inversione
* OFF: non inversione
* FLASH: in fase di
avanzamento in
accelerazione
Indicatore luminoso di
avanzamento
* ON: inversione
* OFF: non inversione
* FLASH: in fase di
inversione in
accelerazione
Indicatore luminoso di Indicatore luminoso prompt composizione
delle unità
allarme
* Composto da tre indicatori luminosi che si
* ON: anomalia
trovano sul lato destro del digitale a LED.
* OFF: normale
*FLASH:l'anomalia Visualizza lo stato corrispondente alle sei
unità, indica le unità dei parametri
precedente non è
visualizzati precedentemente dalLED.
stataconfermata
* i rapporti corriposndenti sono illustrati
di seguito:
UNIT
FWD
REV
ALARM
+
%
A
Tasto multi-funzione MF1/MF2
- MF1 definisce la funzione del tasto mediante
il parametro A43
- MF2 definisce la funzione del tasto mediante
il parametro A44
-A43/A44=0MF definisce la funzione di
aumento
-A43/A44=1MF definisce la funzione di
diminuzione
-A43/A44=2MF definisce la funzione di
arresto libero
-A43/A44=3MF definisce la funzione di
inversione
-A43/A44=4MF definisce la funzione di
puntualità dinamica
-A43/A44=5MF definisce la funzione anti-jog
-A43/A44=6MF definisce la funzione jog
-A43/A44=7MF definisce il comando
SOPRA
-A43/A44=8MF definisce il comando UP
-A43/A44=9MF definisce il comando
DOWN
0.00
0.0
1.Frequenza reale
2. Motore AC
PRG
SET
+
Selezione del parametro
/tasto maiuscole
- selezione del parametro
- bit di modifica dei valori
di funzione
9 PID Tenuto
conto del valore
MF1
MF2
FWD
ESC
STOP/RESET
Hz
%
A
°C
亮
A
°C
°C
S
S
灭
V
V
%
V
UNIT
UNIT
Hz
V
R
ENTE
Selezione 3 del monitor A03
S
V
A
%
A
Display numerico di selezione 2
Selezione 2 del monitor A01
UNIT
V
°C
S
V
Hz
Hz
%
-
-
℃
s
A
°C
S
V
无单位
Hz
%
A
°C
S
V
Display numerico di selezione 3
Selezione 1 del monitor A00
A
°C
Hz
%
%
S
UNIT
Hz
Hz
%
A
Indicatore luminoso del segnale positivo
e negativo (solo per la selezione del
monitor 1)
UNIT
UNIT
Hz
DIGITAL PANEL
S
°C
Tasto ENTER
* Ha la stessa funzione di PRG/tasto >>.
Fare riferimento alle note esplicative del tasto PRG
/
* Non valido nello stato di monitoraggio
Unità periferica/ JOG
*in fase di verifica, i valori della
funzione sono
incrementati o decrementati
* in fase di modifica, i valori della funzione
sono
incrementi o decrementi
* in fase di monitoraggio, la frequenza
impostata è aumentata o diminuita
Tasto di avanzamento
* il convertitore è in marcia di
avanzamento
Opzione accelerazione /tasti di
impostazione dei parametri
* in selezione del parametro, premere
SET e ruotare JOG, la posizione del
parametro arriva a 10
* salvataggio del valore modificato
* modifica dell'oggetto in fase
monitoraggio
18
Tasto Esci
* Uscire
dalla revisione del parametro
* Ritornare alla visualizzazione
menu dal sottomenù o al menu di
funzione
* Uscire dallo stato default
Tasto Reset / Stop
* Arresto del convertitore
* Eccezione Reset
* Conferma di errore
3-2 Esempio di installazione del parametro:
3-2-1 F01 La frequenza è data dalla tastiera, e la si cambia da 50.00Hz a 25.00Hz.
PRG
1.
2.
per entrare nella modalità di ricerca del gruppo di parametri dal
Premi
monitor.
Passi al F00-63 gruppo funzione base con i potenziomentri.
PRG
3.
4.
Premi
oppure entra per entrare la modalità di ricerca del F00-63 gruppo
funzione base.
Passi al F01 data la frequenza è data della tastiera con i potenziomentri.
PRG
5.
Premi
oppure entra per entrare nella modalità di modifica dei parametri del
F01 data la frequenza della tastiera.
6.
7.
Premi
oppure entra per scegliere quel che si desidera modificare.
Modifichi il numero scelto con i potenziomentri.
8.
Premi
PRG
ESC
9.
Premi
SET
quando si finisce di modificare. Se si desidera
annullare, premi
per uscire.
ESC
per tornare al menu precedente.
PRG
PRG
Frequenza di impostazione S00
0.00
una volta
Gruppo funzione di base F00-63
PI8000 G00
0.0
1.Frequenza reale
1. Frequenza reale
2. Motore AC
2. Motore AC
O
ENTER
una volta
Modalità di controllo F00
0.00
Potenziometro
PRG
Tastiera Frequenza di impostazione
F01
0.00
0.0
O
ENTER
Tastiera Frequenza di impostazione
F01
0.00
0.0
dimensione
numerica della
modificato bit
SET
0.00
1. Frequenza reale
2. Motore AC
0.0
una volta
Tastiera Frequenza di impostazione
F01
0.00
0.0
1. Frequenza reale
2. Motore AC
19
O
ENTER
una volta
Potenziometro rettifica viene
Tastiera Frequenza di impostazione
F01
Regolare il tasto
funzione
PRG
La regolazione 1. Frequenza reale
è modificato bit
2. Motore AC
1. Frequenza reale
2. Motore AC
0.0
1. Frequenza reale
2. Motore AC
Tastiera Frequenza di impostazione
F01
0.00
1. Frequenza reale
2. Motore AC
0.0
3-2-2IMPOSTAZIONE DEI PARAMETRI DI SISTEMA
Parametro
Descrizione
Nessuna funzione
Reset dei parametri di sistema dell’area di
archiviazione 1 del tastierino
Reset dei parametri di sistema dell’area di
archiviazione 2 del tastierino
Reset dei parametri di sistema dell’area di
archiviazione 3 del tastierino
Reset dei parametri di sistema dell’area di
archiviazione 4 del tastierino
Ritonare alle impostazioni di fabbrica
dell’area 1,2,3,4 del tastierino
Parametro da
tastierino y10
0
1
2
3
4
5
Esempio 1: caricamento dei parametri di sistema nell'area di memoria 3 del tastierino
PRG
1.Premi
per entrare nella modalità di ricerca del gruppo di parametri dal monitor.
2. Passi al gruppo di funzione di base y00-23 con i potenziomentri.
3. Premi
PRG
oppure entra ,per entrare la modalità di ricerca del y00-23 gruppo
funzione base.
4. Passi al y01 frequenza impostata con tastierino con i potenziomentri.
5. Premi
PRG
oppure entra, per entrare nella modalità di modifica dei parametri di
frequenza y01 impostati con tastierino;
7. Utilizzare il potenziomentri per portare il valore a 3;
8. Premi
SET
quando si finisce di modificare. Se si desidera Il LED visualizzerà il
processo, annullare, premi
9. Premi
ESC
per uscire.
per tornare al menu precedente.
ESC
PRG
Potenziometro
Frequenza di impostazione S00
0.00
una volta
PI8000
0.0
1. Frequenza reale
2. Motore AC
Gruppo funzione di sistema
Y00-23
Gruppo funzione di base F00-63
G00
PI8000
G09
1. Frequenza reale
1. Frequenza reale
2. Motore AC
2. Motore AC
PRG
una volta
PRG
Potenziometro
Parametri da tastiera y01
0.00
0.0
O
ENTER
0.00
1. Frequenza reale
1. Frequenza reale
2. Motore AC
2. Motore AC
Potenziometro
Reset parametro di sistema y10
Parametri da tastiera y01
0.00
0.0
0.0
1. Frequenza reale
2. Motore AC
dimensione
numerica della
rettifica viene
modificato bit
SET
Parametri da tastiera y01
0.00
1. Frequenza reale
2. Motore AC
0.0
una volta
Parametri da tastiera
USE MEMORY 3RD
20
100%-END
STOP-END
Carica
completa
Parametri da tastiera y01
0.00
1. Frequenza reale
2. Motore AC
0.0
3-2-3 RESET DEI PARAMETRI DEL SISTEMA
Parametro
Descrizione
Nessuna funzione
0
Reset dei parametri di sistema dell’area
1
di memorizzazione 1 del tastierino
Reset dei parametri di sistema dell’area
2
di memorizzazione 2 del tastierino
Parametro da
Reset dei parametri di sistema dell’area
3
tastiera y00
di memorizzazione 3 del tastierino
Reset dei parametri di sistema dell’area
4
di memorizzazione 4 del tastierino
Ritorna alle impostazioni di fabbrica
5
dell’area 1,2,3,4 del tastierino
Esempio 1: Area di memoria 3 del tastierino per il reset dei parametri di sistema
1.Premi
PRG
per entrare nella modalità di ricerca del gruppo di parametri dal monitor.
2. Passi al gruppo di funzione di base y00-23 con i potenziomentri.
3. Premi
PRG
oppure entra ,per entrare la modalità di ricerca del y00-23 gruppo
funzione base.
4. Passi al frequenza y01 data dal tastierino con i potenziomentri.
5. Premi
PRG
oppure entra, per entrare nella modalità di modifica dei parametri di
frequenza y00 impostati dal tastierino;
7. Utilizzare il potenziomentri per portare il valore a 3;
8. Quando la regolazione è stata completata, Premi
visualizzerà il processo di caricamento. premi
9. Premi
ESC
ESC
SET
per confermare. Il LED
per uscire dalla modalità di modifica;
per tornare al menu precedente.
PRG
Potenziometro
Frequenza di impostazione S00
0.00
una volta
Gruppo funzione di sistema
Y00-23
Gruppo funzione di base F00-63
PI8000 G09
PI8000 G00
0.0
1. Frequenza reale
2. Motore AC
1. Frequenza reale
2. Motore AC
1. Frequenza reale
2. Motore AC
PRG
Potenziometro
Potenziometro
Reset parametro di sistema y00
0.00
0.0
1. Frequenza reale
dimensione Reset parametro di sistema y00
numerica della
0.00
0.0
rettifica viene
modificato bit 1. Frequenza reale
2. Motore AC
2. Motore AC
SET
USE MEMORY 3RD
100%-END
STOP-END
Download
completato
Reset parametro di sistema y00
0.00
1. Frequenza reale
2. Motore AC
Reset parametro di sistema y00
0.00
1. Frequenza reale
2. Motore AC
una volta
Parametro download per la
tastiera
una volta
0.0
21
0.0
Esempio 2: liberare le aree di memoria 1, 2, 3, 4 del tastierino.
PRG
1.Premi
per entrare nella modalità di ricerca del gruppo di parametri dal
monitor.
2. Passi al gruppo di funzione di base y00-23 con i potenziomentri.
PRG
3. Premi
oppure entra ,per entrare la modalità di ricerca del y00-23 gruppo
funzione base.
4. Passi al frequenza y01 data dal tastierino con i potenziomentri.
PRG
5. Premi
oppure entra, per entrare nella modalità di modifica dei parametri di
frequenza y01 impostati dal tastierino;
7. Utilizzare il potenziomentri per portare il valore a 5;
SET
8. Quando la regolazione è stata completata, Premi
visualizzerà il processo di caricamento. Premi
modifica;
9. Premi
ESC
ESC
per confermare. Il LED
per uscire dalla modalità di
per tornare al menu precedente.
PRG
Potenziometro
Frequenza di impostazione S00
0.00
una volta
Gruppo funzione di sistema
Y00-23
Gruppo funzione di base F00-63
PI8000 G00
0.0
PI8000 G09
1. Frequenza reale
2. Motore AC
1. Frequenza reale
2. Motore AC
1. Frequenza reale
2. Motore AC
PRG
una volta
PRG
Potenziometro
Parametri da tastiera y01
0.00
0.0
o
ENTER
Il mancato reset dei parametri y01
Parametri da tastiera y01
0.00
0.00
0.0
0.0
1. Frequenza reale
2. Motore AC
1. Frequenza reale
2. Motore AC
1. Frequenza reale
2. Motore AC
Potenziometro
SET
Parametri da tastiera y01
0.00
1. Frequenza reale
2. Motore AC
0.0
una volta
Parametri da tastiera y01
0.00
0.0
1. Frequenza reale
2. Motore AC
22
Cancella
finitura
Parametri da tastiera y01
0.00
1. Frequenza reale
2. Motore AC
0.0
3-2-4 F2 DEFINISCE LA MODALITÀ PRINCIPALE DI IMPOSTAZIONE DELLA
FREQUENZA DATA DAL TASTIERINO 4 SU POTENZIOMETRO.
1. In fase di monitoraggio, è possibile regolare la frequenza mediante il potenziomentri.
Il rapporto di risoluzione del potenziometro è 0.05Hz.
2.La gamma di frequenza può essere impostata con i seguenti parametri:
Parametro
Descrizione
Gamma della frequenza di uscita massima del
F12 frequenza massima
convertitore consentita:10.00 ~ 320.00Hz
A45 impostazione X1 del
Valore iniziale impostato dal tastierino su
tastierino su
potenziometro
potenziometro
A46 impostazione X2 del
Valore finale impostato dal tastierino su potenziometro
tastierino su
potenziometro
Visualizza il valore di regolazione del potenziometro,
A47 Valore impostato dal
gamma: A45 ~ A46. E' inoltre è possibile
tastierino su
l’impostazione diretta, gamma di regolazione: A45 ~
potenziometro
A46
A48 impostazione X1 del
Valore iniziale corrispondente al valore impostato dal
tastierino su
tastierino su potenziometro
potenziometro corrisponde
Gamma di regolazione: -100% ~ 100%
a Y1
A49 impostazione X2 del
tastierino su
Valore finale corrispondente al valore impostato dal
potenziometro corrisponde tastierino su potenziometro
a Y1
Visualizza la misura della frequenza presedentemente
S00 Frequanza impostata
impostata mediante le impostazioni del potenziometro.
Esempio:
F12 = 50.00Hz, A45 = 0%, A46 = 100%, A47 mostra che il valore delle
impostazioni del potenziometro sono comprese tra 0% ~ 100%, la dimensione numerica
può essere regolata tramite il potenziometro.
(1) Quando A48 = 0%, A49 = 100%, la gamma di frequenza impostata S00 è
0.00Hz ~ 50.00Hz.
(2) Quando A48 = 0%, +50% = A49, S00 la gamma di frequenza impostata S00 è
0.00Hz ~ 25.00Hz.
(3) Quando A48 =- 100%, A49 = 100%, la gamma di frequenza impostata S00 è
50.00Hz ~ 50.00Hz.
Nota: E' necessario invertire il motore quando si raggiunge -50,00 ~ 0Hz, è inoltre
necessario impostare F45 10 bit retromarcia come comando 1 di priorità: dato
analogico positivo e negativo, per i dettagli relativi a F45 fare riferimento alla
descrizione del parametro F45.
23
3-2-5 F2 DEFINISCE LA MODALITÀ PRINCIPALE DI IMPOSTAZIONE DELLA
FREQUENZA AI1 DATA DA ANALOGICO ESTERNO
1. In fase di monitoraggio, è possibile regolare la frequenza mediante il potenziometro.
Il rapporto di risoluzione del potenziometro è 0.01Hz.
2. La gamma di frequenza può essere impostata con i seguenti parametri:
Parametro
F12 frequenza massima
o00 AI1 ingresso X1
o01 AI1ingresso X2
o06 AI1ingresso
X1corrispondente a Y1
o07 AI1ingresso
X2corrispondente a Y2
S00 frequenza impostata
Descrizione
Frequenza di uscita massima del convertitore consentita:
10.00 ~ 320.00Hz
Valore iniziale impostato dal tastierino su
potenziometro. Gamma di frequenza:0~100%
Valore iniziale impostato dal tastierino del
potenziometro. Gamma di frequenza: 0~100%
Valore corrispondente al valore iniziale impostato.
Gamma di frequenza:-100%~+100%
Valore corrispondente al valore iniziale impostato.
Gamma di frequenza:-100%~+100%
Visualizza la misura della frequenza attualmente
impostata mediante adeguamento AI1 della frequenza
dei terminali di ingresso analogici esterni
Gamma di impostazione: F12×o06~ F12×o07
Esempio:
F12=50.00Hz, o00=0%, o01=100%,
1. Quando o06=0%,o07=+100%, la gamma di frequenza impostata S00 è 0.00Hz ~
50.00Hz.
(4) Quando o06=0%,o07=+50%, S00 la gamma di frequenza impostata S00 è
0.00Hz ~ 25.00Hz.
(5) Quando o06=-100%,o07=+100%, la gamma di frequenza impostata S00 è
50.00Hz ~ 50.00Hz.
Nota: E' necessario invertire il motore si raggiunge -50,00 ~ 0Hz ed è inoltre necessario
impostare F45 10 bit retromarcia come comando di priorità: dato analogico
positivo e negativo, per i dettagli relativi a F45 fare riferimento alla descrizione del
parametro F45.
24
CAPITOLO 4
TEST DI FUNZIONAMENTO
1. Quando si verifica il fallimento di un test, si prega di fare riferimento alle
contromisure indicate nella sezione 6-1 del presente manuale relativa alla risoluzione
dei problemi.
2. I parametri del convertitore hanno una forte capacità di adattamento, in condizioni
generali B11 = 1 calcolato utilizzando i parametri della targhetta del motore,
generalmente, una piccola regolazione manuale può far ottenere controllo vettoriale ad
alte prestazioni.
3. Solo quando il motore è completamente privo di carico è posibile impostare la
misurazione della rotazione del motore b11 = 3.
4. Prima del completamento della misurazione dei parametri elettrici, il convertitore
può avere in qualsiasi momento uscita di tensione. Si prega quindi di garantire le
necessarie misure di sicurezza.
Test di
funzionamento
Conferma della potenza in tensione
del convertitore nella gamma di
tensione nominale di ingresso
Collegare l'alimentazione connessa
al RST del convertitore, confermare
la corretta messa a terra
Dopo aver verificato che la potenza del
convertitore corrisponde alla potenza del motore,
reimpostare il valore di fabbrica y00 = 5
Le opzioni dei parametri del motore stabiliti secondo la
serie di parametri presenti sulla targhetta del motore:
potenza nominale, corrente nominale, tensione nominale,
numero di coppie di poli, velocità del motore
Impostare il corretto tempo di accelerazione e
decelerazione, la frequenza massima del
motore F12, la frequenza di base F15
Impostare il tastierino per
una data frequenza F01
Premere il tasto FWD del
tastierino per la marcia di
avanzamento
Interrompere la corrente,
scambiare qualsiasi linea
del motore bifase
Marcia di
avanzamento del
motore
N
Y
Dopo lo spegnimento del
motore, impostare i
parametri del motore
b11=2
b11=1
calcolato utilizzando misurazione delle
frequenza statica del
la targhetta
convertitore
Premere FWD per avviare l'autosintonizzazione (il motore
potrebbe essere in esecuzione, si
prega di fare attenzione)
Completamento
del test di
funzionamento
b11=3
misurazione del
funzionamento del
convertitore
Impostare i corretti parametri di
accelerazione e decelerazione
F09/F10 e del parametro di controllo
di coppia F06/F07
N
Y
Selezionare la modalità di
controllo F00
Controllo
V/F
Controllo
vettoriale
sensorless
25
Controllo
vettoriale
sensor
Controllo
V/F
Modalità di aggiornamento
V/F secondo l'impostazione
del parametro F06
Impostazione del valore di
spinta di coppia F07
Controllo
Vettoriale
sensor
Regolare l'anello di velocità
C01-C07, scambiare il guadagno
differenziale C09-C12, regolare i
parametri del motore
Regolare l'anello di velocità C01-C07,
scambiare il guadagno differenziale
C09-C12, regolare i parametri del motore
Funzionamento
Ottimizzazione
dei parametri
Osservazione della
corrente di
funzionamento
Y
STOP, test di
funzionamento
completato
N
Ottimizzazione
dei parametri
Impostare gli
impulsi C28 del PG
Osservare la corrente del motore, la
componente di eccitazione, la componente
di fluttuazione della coppia
Normale
funzionamento
Normale
funzionamento
Impostare la coppia
superiore C13 e C14
Impostare la coppia
superiore C13 e C14
Impostazione della frequenza
di funzionamento F01
Funzionamento
Controllo
Vettoriale
sensorless
Y
Funzionamento
Osservare la corrente
del motore S06
N
N
STOP, test di
funzionamento
completato
Normale
funzionamento
Ottimizzazione
dei parametri
Y
Osservare la corrente del
motore, la componente di
eccitazione, la componente di
fluttuazione della coppia
Normale
funzionamento
Y
STOP, test di
funzionamento
completato
26
N
CAPITOLO 5
DESCRIZIONE DEI PARAMETRI DI FUNZIONAMENTO
5-1 FUNZIONI DI MENU GRUPPO
COD
ICE
DETTAGLI/LCD
QUANTI
TÀ
DESCRIZIONE DELLA FUNZIONE
GRUPPO
S
gruppo
funzione di
monitoraggio
Monitoraggio della frequenza, della
corrente e di altri 16 componenti
16
0B
F
gruppo
funzione di base
impostazione della frequenza, la
modalità di controllo, il tempo di
acceleratione e tempo di decelerazione
51
00
gruppo funzioni
utente
gruppo
funzione IO
Gruppo PLC
multivelocità
gruppo curva
V/F
gruppo
funzione PID
Impostazioni di monitoraggio,
protezione e comunicazione
Ingresso analogico e digitale, funzione
di uscita
Funzionamento multivelocità,
funzionamento PLC
56
01
61
02
56
03
Curva V/F definita dall’utente
16
04
Impostazione dei parametri del PID
interno
13
05
E
gruppo di
funzionalità
estesa
Impostazione della fornitura di acqua a
pressione costante e di altre funzioni
24
06
C
gruppo di
funzione
dell’anello
veloce
anello di corrente, velocità di
funzionamento, parametro PG
32
07
b
gruppo dei
parametri del
motore
Impostazione dei parametri del motore
23
08
y
gruppo funzioni
di sistema
Reimpostazione dei parametri, errori,
informazioni sul prodotto, parametri di
protezione
18
09
A
o
H
U
P
5-2 FUNZIONI DI MONITORAGGIO GRUPPO
CODICE
DETTAGLI/tas
tierino LCD
IMPOSTAZIONI DISPLAY A
LED A 7 FRAMMENTI
S00
Impostazione
della
frequenza
Frequenza reale impostata del
convertitore
27
UNITÀ
IMPOST
AZIONI
DI
FABBRI
CA
CAMBIA
MENTO
DEL
LIMITE
Hz
-
No
S01
S02
S03
S04
S05
Frequenza
reale
Corrente reale
del motore
Percentuale
della corrente
del motore
Tensione del
CD bus
Attuale frequenza reale
impostata del convertitore
Attuale corrente di uscita
reale del convertitore
Percentuale della corrente del
motore e della corrente
nominale reale
Valore di rilevamento della
tensione del CD bus
Tensione di
uscita
Tensione di uscita reale del
convertitore
Hz
-
No
A
-
No
%
-
No
V
-
No
V
-
No
S06
Velocità reale
Velocità effettiva del motore
No
del motore
In condizioni di marcia, la velocità reale del motore = 60 × la frequenza reale di uscita ×
guadagno monitoraggio della velocità / poli del motore.
Esempio: la frequenza è 50.00Hz, il guadagno monitoraggio della velocità A35=100.0%, il
polo del motore b03/b16 = 2, la velocità reale del motore = 1500rpm.
In condizioni di arresto, velocità del motore basata sui test di tensione residua, velocità
rinnovata di 500ms. La velocità reale = 60 × la frequenza residua × il guadagno monitoraggio
della velocità / il polo del motore.
La visualizzazione massima della velocità reale del motore è di 9999.
S07
Tempo totale
Totale tempo di marcia per
Ore
No
di marcia
ogni esecuzione
Tempo totale di marcia iniziale del convertitore in fase di uscita.
Selezionando A33 è possibile scegliere di annullare o di continuare dopo l’avvio del
convertitore il precedente calcolo del tempo totale di marcia.
L’unità di misura del tempo totale di marcia può essere cambiata con il parametro A34 con
il quale è possibile scegliere di impostare come unità l'ora o il giorno.
S08
Temperatura
ICBT in ℃
S09
Set-point PID
S10
Feedback PID
Test della temperatura
raggiunta all’interno del
convertitore.
Percentuale del set-point del
regolatore PID in
funzionamento.
Percentuale del feedback del
PC
℃
-
No
%
-
No
%
-
No
S11
Frequenza di
Percentuale della frequenza di
uscita del
%
No
uscita reale del motore
motore
La frequenza di uscita del motore = la frequenza effettiva del motore × la regolazione A36
della frequenza.
La visualizzazione massima della frequenza di uscita del motore è 2.999,9
S12
Valore dato di
eccitazione
del motore.
Percentuale di impostazione
dell’eccitazione del motore.
28
%
-
No
S13
Valore dato
dell’eccitazio
ne reale del
motore
Valore dato
della coppia
del motore.
Valore dato
della coppia
reale del
motore.
S14
S15
Percentuale reale
dell’eccitazione del motore
%
-
No
Percentuale di impostazione
della coppia del motore.
%
-
No
Percentuale reale della coppia
del motore.
%
-
No
IMPOSTAZIONI DISPLAY A LED A 7
FRAMMENTI
U
NI
TÀ
5-3 FUNZIONI DI BASE GRUPPO
CO
DIC
E
DETTAGLI/tastie
rino LCD
IMPOS
TAZIO
NI DI
FABB
RICA
CAMBI
AMENT
O DEL
LIMITE
Controllo V/F
0
Controllo
vettoriale
sensorless
1
F00
0
No
Controllo vettoriale ad anello
2
chiuso del sensore di retroazione
La selezione della modalità di controllo può essere impostata come 0~2.
0: Controllo V / F
Non è sensibile ai parametri del motore, può essere usato come alimentatore; per quanto
riguarda il controllo motore, utilizzando la strategia di controllo combinata controllo
vettoriale e controllo V / F è possibile regolare opportunamente i parametri del motore
ottenendo effetti di controllo ad alte prestazioni; adatto per convertitori con un solo motore;
adatto per convertitori con più motori; adatto per convertitori che fungono da alimentatori a
frequenza variabile.
1: Controllo vettoriale sensorless
Controllo vettoriale sensorless ad alte prestazioni di velocità; è necessario impostare gli
appropriati parametri elettrici oppure svolgere la messa a punto del motore; raggiungimento
effettivo di un motore a corrente alternata disaccoppiato che permette di svolgere controllo
operativo del motore a corrente continua.
2: Controllo vettoriale ad anello chiuso con sensore di retroazione
Adatto per svolgere un controllo della velocità di alta precisione, è necessario installare
la scheda PG nel convertitore e installare encoder ad impulso nel motore o nelle componenti
meccaniche.
Frequenza
F01
Bassa frequenza~alta frequenza
Hz
50.00
Si
impostata dal
tastierino
La frequenza di funzionamento data dal tastierino può essere qualsiasi frequenza
compresa tra il limite minimo e il limite massimo.
Impostando F02/F03 su 0, partecipa al calcolo della frequenza impostata.
Modalità
Impostazione della frequenza
F02
0
Si
0
principale di
con tastierino o RS485
impostazione
AI1 analogico esterno
1
Modalità di
controllo
29
della
frequenza
AI2 analogico esterno
2
AI3 analogico esterno
3
Tastierino su potenziometro
4
Tensione digitale multi5
segmento di impostazione
Impostazione a impulsi digitali
6
Modalità principali della frequenza di funzionamento del convertitore:
0: la frequequenza impostata con tastierino o RS485 modifica la frequenza impostata dal
tastierino F01
Dopo il cambio effettivo dell’impostazione della tensione terminale multisegmento,
cambiare l’impostazione del valore del tastierino F01.
1: AI1 analogico esterno
L’impostazione analogica esterna è 0 ~ 10V, 10V- ~ +10 V, 0 ~ 20mA. Per maggiori
dettagli si prega di fare riferimento al gruppo di parametri o.
2: AI2 analogico esterno
3: AI3 analogico esterno
L’impostazione analogica esterna è 0 ~ 10V, 0 ~ 20mA. Per maggiori dettagli si prega
di fare riferimento al gruppo di parametri o.
4: Impostazione tastierino su potenziometro.
Con l’impostazione del tastierino su potenziometro, il valore corrispondente al valore
iniziali e finali impostato dal tastierino su potenziometro, può essere considerato avente
effetto negativo e effetto positivo. Per maggiori dettagli si prega di fare riferimento al
gruppo di parametri A.
5: Impostazione tensione digitale multi-segmento
Con funzione terminale di ingresso IO o36~ o46 impostata a 11, 12, 13, si scambia il
valore di impostazione della tensione multi-segmento H47~ H54, 100% corrisponde alla
frequenza massima.
6: Impostazione della frequenza a impulsi digitali
Frequenza di impostazione corrispondente alla frequenza dell’impulso digitale di
ingresso. Per maggiori dettagli si prega di fare riferimento al parametro o al gruppo o52.
Riutilizzando il terminale di ingresso a impulsi e il terminale DI8, dopo aver impiegato
l'ingresso digitale a impulsi, impostare o43 impostato su 0, diversamente, le impostazioni di
funzione avranno effetto. È possibile verificare lo stato degli impulsi di ingresso con o58
fino a limitarsi agli impulsi a bassa velocità.
Impostando il terminale a impulsi IO con o36 ~ o46 su 14, 15, 16 è possibile impostare
lo scambio di corrente.
Modalità
Frequenza impostata con
F03
0
Si
0
secondaria di
tastierino o con RS485
frequenza
Impostazione analogico esterno
1
AI1
Impostazione analogico esterno
2
AI2
Impostazione analogico esterno
3
AI3
Impostazione tastierino del
4
potenziometro
Tensione digitale multi5
segmento
30
Impostazione a impulsi digitali
6
Modalità regolazione PID
7
Modalità secondarie principali della frequenza di funzionamento del convertitore:
0: la frequequenza impostata con tastierino o RS485 modifica la frequenza impostata dal
tastierino F01
Dopo il cambio effettivo dell’impostazione della tensione terminale multisegmento,
cambiare l’impostazione del valore del tastierino F01.
1: AI1 analogico esterno
L’impostazione analogica esterna è 0 ~ 10V, 10V- ~ +10 V, 0 ~ 20mA. Per maggiori
dettagli si prega di fare riferimento al gruppo di parametri o.
2: AI2 analogico esterno
3: AI3 analogico esterno
L’impostazione analogica esterna è 0 ~ 10V, 0 ~ 20mA. Per maggiori dettagli si prega
di fare riferimento al gruppo di parametri o.
4: Impostazione tastierino su potenziometro.
Con l’impostazione del tastierino su potenziometro, il valore corrispondente al valore
iniziali e finali impostato dal tastierino su potenziometro, può essere considerato avente
effetto negativo e effetto positivo. Per maggiori dettagli si prega di fare riferimento al
gruppo di parametri A.
5: Impostazione tensione digitale multi-segmento
Con funzione terminale di ingresso IO o36~ o46 impostata a 11, 12, 13, si scambia il
valore di impostazione della tensione multi-segmento H47~ H54, 100% corrisponde alla
frequenza massima.
6: Impostazione della frequenza a impulsi digitali
Frequenza di impostazione corrispondente alla frequenza dell’impulso digitale di
ingresso. Per maggiori dettagli si prega di fare riferimento al parametro o al gruppo 52.
Riutilizzando il terminale di ingresso a impulsi e il terminale DI8, dopo aver impiegato
l'ingresso digitale a impulsi, impostare o43 su 0, diversamente, le impostazioni di funzione
avranno effetto. È possibile verificare lo stato degli impulsi di ingresso con o58 fino a
limitarsi agli impulsi a bassa velocità.
Impostando il terminale a impulsi IO con o36 ~ o46 su 14, 15, 16 è possibile impostare
lo scambio di corrente.
7: Modalità PID
Controllo ad anello chiuso con completa retroazione analogica comune a tutte le
frequenze. Adatto alle situazioni in cui è richiesta accuratezza nel controllo della velocità.
Il valore dato può essere impostato tramite la tastiera e medinate analogico.
La retroazione analogica può rappresentare la pressione, il flusso, la temperatura.
Per maggiori dettagli si prega di fare riferimento al gruppo di parametri P.
Impostando il terminale a impulsi IO con o36 ~ o46 su 17, 18, 19 è possibile impostare lo
scambio di corrente.
Relazioni
F04
0
Si
Controllo individuale principale
0
principali e
Controllo individuale secondario
1
secondarie di
Principale + secondario
2
della
frequenza di
Principale - secondario
3
impostazione
(principale ×
4
secondario)/frequenza massima
Valore massimo {principale,
5
secondario}
31
Valore minimo {principale,
6
secondario}
Relazioni principali e secondarie della frequenza di impostazione:
I valori di impostazione principali e i valori di impostazione secondari possono essere
utilizzati per aggiungere, sottrarre, moltiplicare, per il calcolo del valore massimo e del
valore minimo.
Impostando il gruppo di parametri O, è possibile regolare il rapporto proporzionale tra
valore principale di impostazione e valore secondario di impostazione soddisfacendo i
requisiti di sistema.
f
f Frequenza impostata
f max
f
fPrincipale
F04
fFrequenza impostata
fPrincipale
fSecondaria
Relazioni principali e secondarie
Principale + secondaria
f
t
f
f max
f Principale
fSecondaria
f Principale
fSecondaria
fFrequenza impostata
t
t
f Frequenza impostata
Principale - secondaria
(principale X secondaria)/ frequenza massima
f
f
f max
f max
fFrequenza
impostata
f Secondaria
fFrequenza
impostata
fPrincipale
t
fSecondaria
f Principale
t
Valore massimo (principale e secondario)
Valore minimo (principale e secondario)
Tastierino + RS485/CAN
0
Tastierino + morsettiera +
1
Modalità
RS485/CAN
controllo del
0
Si
F05
RS485/CAN
2
funzionament
Controllo con morsettiera
3
o
Controllo del rapporto di
4
collegamento
Modalità di controllo del comando di arresto e di marcia.
0: controllo con tastierino + RS485/CAN.
1: Controllo con tastierino + morsettiera + RS485/CAN.
Edge- trigger, caduta seguita dall’esecuzione del comando di avanzamento FWD / comando
32
di retromarcia REV, aumento seguito dall’esecuzione del comando di arresto STOP per il
controllo dei terminali.
2: Controllo RS485/CAN.
Con questa funzione, il controllo di marcia è inefficace eccetto che per la funzione di libero
arresto.
3: Controllo del terminale, level-trigger.
Con questa funzione, il controllo di marcia è inefficace eccetto che per la funzione di libero
arresto.
4: Controllo dei rapporti di collegamento
Le unità slave del collegamento proporzionale di questa funzione rispondono al comando di
marcia dell’unità host del collegamento proporzionale.
Dopo aver selezionato questa funzione, è inoltre possibile controllare il funzionamento
dell’unità slave del collegamento proporzionale utilizzando il tastierino, i terminali, il
controllo RS485, ecc.
Durante il processo di esecuzione del rapporto proporzionale, dopo aver controllato
l’arresto dell’unità slave attraverso il 06tastierino, i terminali, il controllo RS485, ecc.,
l’unità slave non risponde più al comando di marcia dell’unità host del collegamento
proporzionale, è necessario ripetere ancora una volta il comando dell’host, è necessario che,
dopo aver inviato il comando di arresto dell’unità host del collegamento proporzionale
utilizzando la tastiera, i terminali, il controllo RS485, si invii nuovamente la risposta al
comando di arresto.
Curva lineare V/F
Curva V/F potenza 1.2
Curva V/F potenza 1.7
1 bit
Curva V/F potenza 2
Curva V/F modalità
perzonalizzata
0000
No
Modalità di
Spegnimento della spinta
F06
aggiorname
automatica della coppia
10 bit
nto V/F
Spinta automatica della
coppia
100
bit
Modalità VF nessuna uscita a
velocità 0
1000
bit
Modalità VF velocità
mantenuta 0
1 bit: Curva di spinta V / F
0 curva lineare V/F: adatta per carichi costanti di coppia comune.
1 Curva V / F con potenza 1.2: curva V/F di coppia ridotta adatta per carichi liquidi.
2 Curva F/V con potenza 1.7: curva V/F di coppia ridotta adatta per carichi liquidi.
3 Curva V/F con potenza 2: curva V/F di coppia di ridotta adatta per ventilatori, pompe e
altri carichi centrifughi.
4 Curva V/F con modalità personalizzata: è possibile adattare la curva liberamente in
base alla situazione reale.
10 bit: spinta automatica della coppia
0 spegnimento della spinta automatica della coppia
1 azionamento della spinta automatica della coppia
33
Influenza il parametro del valore di spinta automatica della coppia:
S15 valore reale della componente coppia
b06/b19 resistenza statore
F07 valore della spinta di coppia
Valore spinta automatica di coppia = valore reale della componente coppia * resistenza
statore * valore spinta di coppia
100 bit: funzione modalità VF velocità mantenuta 0
0 Modalità VF nessuna uscita a velocità 0: con frequenza di uscita inferiore a 0.5Hz,
l’uscita PWM si arresta e si riducono le perdite di commutazione.
1 Modalità VF velocità mantenuta 0: con frequenza di uscita inferiore a 0.5Hz, si mantiene
la velocità su 0 in base alla corrente di frenatura continua all’avvio F26.
Valore di spinta
F07
0.0~30.0%
%
0.0
Si
della coppia
Frequenza di
0.00~frequenza massima
Hz
15.00
Si
F08
taglio dela spinta
di coppia
La spinta della coppia viene utilizzata principalmente per migliorare le caratteristiche della
coppia a bassa frequenza in modalità di controllo V/F sensorless.
Quando la spinta della coppia è in ribasso, la bassa velocità del motore è debole. Quando la
spinta di coppia è in rialzo, il motore è in sovraeccitazione, grande uscita di corrente del
convertitore con efficacia in ribasso.
La spinta di coppia è valida quando la frequenza impostata del convertitore ha frequenze
minori della spinta di coppia, mentre con l’aumento della frequenza impostata, la spinta
della coppia non è valida.
Tensione
Motore
Tensione nominale del
motore
Tensione di spinta
Frequenza di taglio Frequenza di base
Tensione
Motore
Tensione nominale del
motore
Tensione di spinta
Frequenza di taglio Frequenza di base Frequenza
Frequenza
Spinta della coppia nella curva
costante della coppia
Spinta della coppia nella curva di
ribasso della coppia
Tempo di
0.0~3200.0
s
10.0
Si
accelerazione
Tempo di
F10
0.0~3200.0
s
10.0
Si
decelerazione
Tempo di accelerazione F09: tempo di accelerezione da 0 Hz alla frequenza massima.
Tempo di decelerazione F10: tempo di decelerazione dalla frequenza massima a 0 Hz.
F09
34
Frequenza massima
Tempo di marcia
F09
F10
Lineari di accelerazione e decelerazione
Percentuale della
50~110
%
100
Si
tensione di uscita
Percentuale della tensione di uscita reale e della tensione di uscita nominale.
Utilizzata per regolare la tensione di uscita, tensione di uscita = tensione di uscita nominale
del convertitore × percentuale della tensione di uscita.
F12
Frequenza massima
10.00~320.00
Hz
50.00
No
La frequenza massima di uscita del convertitore permessa è alla base delle impostazioni del
tempo di accelerazione/ decelerazione.
Per questa impostazione dei parametri, è necessario considerare le caratteristiche e la
capacità di velocità del motore.
Limite minimo della 0.00~limite massimo della
Hz
0.00
No
F13
frequenza
frequenza
Limite minimo della
Limite massimo
F14
frequenza ~ frequenza
Hz
50.00
No
della frequenza
massima
F11
Massima frequenza
Limite massimo
della frequenza
Limite minimo
della frequenza
0
Segnale delle
impostazioni di frequenza
100%
F13 limite minimo della frequenza: il limite minimo della frequenza di uscita.
F14 limite massimo della frequenza: il limite massimo della frequenza di uscita.
Quando l’impostazione della frequenza è superiore al limite massimo della frequenza,
la frequenza di marcia è il limite massimo della frequenza; quando l’impostazione
della frequenza è inferiore al limite minimo della frequenza, la frequenza di marcia è il
limite minimo della frequenza. Quando il motore viene avviato da stato di arresto,
l'uscita del convertitore inizia ad aumentare da 0 Hz fino il limite massimo o il limite
minimo, in base a piccoli tempi di accelerazioni.
Quando il motore è in stato arrestato, si ha una dimuzione della frequenza di marcia in
base a piccoli tempi di decelerazione fino a 0 Hz.
Frequenza di
F15
5.00~frequenza massima
Hz
50.00
No
base
Questa funzione corrisponde a diverse frequenze di base del motore. La curva caratteristica
del V / F di base è illustata di seguito:
35
Vout
Un
Fout
Frequenza di base
Frequenza massima
Frequenza
1.0~16.0
kHz
★
Si
portante
Questa funzione è principalmente utilizzata per migliorare i possibili fenomeni di
rumore e di vibrazione che si possono verificare durante le operazioni del convertitore.
Quando la frequenza portante è più alta, la forma della curva della corrente di uscita è
abbastanza ideale e i rumori del motore minori. Adatto spesso quando è necessario
minimizzare i rumori. Tuttavia, in questo caso la perdita di commutazione dei componenti
principali è piuttosto grande, il calore generato dai convertitori elevato, l'efficienza bassa e
la capacità produttiva ridotta. Insieme a più elevate interferenze radio, un altro problema
legato all’utilizzo di un’alta frequenza portante è l’aumento della dispersione della corrente
capacitiva, l’utilizzo di filtri di protezione della corrente residua può causare
malfunzionamenti e influenzare anche la corrente.
Quando è applicata bassa frequenza portante, il fenomeno che si verifica è opposto a quello
descritto sopra. La capacità portante ottimale deve essere impostata e raggiunta in base alle
condizioni reali. Tuttavia con l’aumento della cilindrata del motore, deve essere selezionata
la frequenza portante.
La presente azienda si riserva il diritto di limitare la frequenza massima.
Le relazioni tra frequenza portante e il rumore del motore, i disturbi elettrici, la dissipazione
e le perdite di commutazione sono espresse come segue:
F16
Frequenza
portante
Rumore del
motore
Dissipazione
Perdita di
commutazione
1.0KHz
alto
↕
basso
basso
↕
alto
basso
↕
alto
8.0KHz
16.0KHz
Il rapporto tra il valore di fabbrica della frequenza portante e la potenza è espresso come
segue:
Superiore a
Potenza (kW)
0.4-18.5
22-30
37-55
75-110
132-200
220
Frequenza
8.0K
7.0K
4.0K
3.6K
3.0K
2.5K
portante(Hz)
Nota: Maggiore è la frequenza portante, maggiore sarà la temperatura di tutta la
macchina.
Intervallo di
regolazione
F17
della
0.0~4.0
kHz
0.0
Si
frequenza
portante
F18
Modalità di
1
00
Si
Regolazione non automatica 0 36
regolazione
della
frequenza
portante
bit
Regolazione automatica
1
Regolazione automatica,
0
modalità fissa
10
bit
Regolazione automatica,
1
modalita casuale
F17 Intervallo di regolazione della frequenza portante
0.0 ~ 4.0kHz, dopo aver regolato la frequenza portante reale, il margine è 1.0 ~ 16.0kHz
F18 Modalità di regolazione della frequenza portante
1 Bit: modalità di regolazione automatica della frequenza portante.
0: Regolazione non automatica della frequenza
Frequenza portante impostata con la funzione F16.
1: Modalità di regolazione automatica
Modalità di regolazione automatica della frequenza portante. Con 10 bit è possibile
selezionare la modalità casuale e la modalità fissa.
10 bit: Modalità di regolazione casuale
0: Regolazione automatica, modalità fissa
Corrente di carico >80% frequenza portante = F16-F17.
Corrente di carico <60% frequenza portante = F16 + F17
1: Regolazione automatica, modalità casuale
Corrente di carico > 80% frequenza portante = (F16-F17) ~ F16 Corrente di carico <
60% frequenza portante = F16~(F16+F17)
Asincronismo spazio-vettore
0
PWM
Modalità
Sub-sincronismo spazio-vettore
generazione
F19
1
No
1
PWM
forme d’onda
Ottimizzazione a due-fasi dello
2
spazio vettore PWM
Modalità di generazione di forme d'onda PWM.
0: Asincronismo spazio-vettore PWM.
1: Sub-sincronismo spazio-vettore PWM, minimizzazione dell’armonia.
2: Ottimizzazione a due-fasi dello spazio vettore PWM, minimizzazione delle perdite di
commutazione.
Fase iniziale della curva di
F20
0.0~50.0
%
0.0
Si
accelerazione S
Fase di arresto della curva
F21
0.0~50.0
%
0.0
Si
di accelerazione S
Fase iniziale della curva di
F22
0.0~50.0
%
0.0
Si
decelerazione S
Fase di arresto della curva
F23
0.0~50.0
%
0.0
Si
di decelerazione S
37
Frequenza standard
F20
Frequenza attuale
1
2
F21
F22
3
1
F09
F23
2
3
Tempo di marcia
F10
Fase iniziale della curva di accelerazione S
1 indica la pendenza della frequenza di uscita da 0 al segmento massimo.
2 indica la pendenza della frequenza in uscita a segmento costante.
3 indica la pendenza della frequenza di uscita a segmento ridotto a 0 dal massimo.
Come le curve di accelerazione e decelerazione S, il tempo di accelerazione e
decellerazione della frequenza da 0 Hz al massimo si calcola come segue:
Tempo caratteristico S in accelerazione plus= F09 × F20
Tempo caratteristico S in accelerazione costante= F09- (F09×F20+F09×F21)
Tempo caratteristico S in accelerazione ridotta= F09×F21
Tempo totale di accelerazione= tempo di accelerazione F09
Tempo caratteristico S in decelerazione plus= F10×F22
Tempo caratteristico S in decelerazione costante= F10- (F10×F22+F10×F23)
Tempo caratteristico S in decellerazione plus= F10×F23
Tempo totale di decellerazione= tempo di decellerazione F10
Funzione di compensazione
0
dello scorrimento non attiva
0
No
F24
Funzione di compensazione
1
dello scorrimento attiva
0: Funzione di compensazione dello scorrimento non attiva.
1: Operando in modalità di controllo V/F la funzione di compensazione dello scorrimento è
attiva.
Il valore della compensazione di scorrimento garantisce velocità stabile con fluttuazioni di
carico e carichi pesanti attraverso la regolazione dei seguenti parametri:
C09 guadagno nella compensazione a bassa velocità
C10 frequenza di commmutazione dello slittamento a bassa velocità
C11 guadagno nella compensazione ad alta velocità
C12 frequenza di commmutazione dello scorrimento ad alta velocità
Frequenza
F25
0.00~frequenza massima
Hz
0.00
No
minima di
funzionamento
Con frequenza impostata inferiore alla frequenza minima di funzionamento, il
convertitore si arresterà, cioè quando la frequenza impostata è minore rispetto alla
frequenza minima di funzionamento tutte le frequenze impostate decise saranno azzerate.
Il rapporto tra “la frequenza di funzionamento minima” e “il limite minimo della
frequenza” è illustrato di seguito:
Compensazione
dello scorrimento
del controllo V/F
38
Set di frequenza
Set di frequenza
Limite minimo
della frequenza
Limite minimo
della frequenza
Frequenza minima
Frequenza minima
frequenza
effettiva
Tempo
Tempo
frequenza
effettiva
Limite minimo
della frequenza
Limite minimo
della frequenza
Frequenza minima
Frequenza minima
Tempo
Frequenza minima < limite minimo della frequenza
Tempo
Frequenza minima > limite minimo della frequenza
Frenatura della corrente
0~135
%
100
Si
DC all’avvio
Tempo di frenatura
F27
0.0~60.0
s
0.0
Si
all’avvio
All’avvio del convertitore, per prima cosa avviene iniezione di corrente continua, la
dimensione di questa corrente è impostata dalla corrente di frenatura DC all’avvio, il tempo
di frenatura è impostato dal tempo iniziale di frenatura.
Il valore è basato sulla corrente nominale del convertitore che corrisponde al 100% della
corrente nominale del convertitore. Durante il processo di impostazione, accertarsi di
aumentare lentamente dal minimo, fino a raggiungere il momento frenante adeguato e senza
superare la corrente nominale del motore.
F26
Frequenza di uscita
Frenatura
all'avvio
Tempo
Comando di marcia
Comando di arresto
ON
Frenatura all'avvio
Frenatura della
corrente DC
0~135
%
100
Si
all’arresto
Tempo di attesa di
F29
0.0~60.0
s
0.0
No
frenatura all’arresto
Tempo
di
frenatura
F30
0.0~60.0
s
0.0
No
all’arresto
Frequenza inizale
F31
della frenatura
0.00~frequenza massima
Hz
0.00
Si
all’arresto
Il convertitore, in frequenza iniziale di frenatura dall’accelerazione all’arresto, arresta la
forma d'onda PWM in uscita e inizia l’iniziezione a corrente continua, la dimensione di
questa corrente è impostata dalla corrente di frenatura DC all’avvio, il tempo di frenatura è
impostato dal tempo iniziale di frenatura.
Il valore è basato sulla corrente nominale del convertitore che corrisponde al 100% della
corrente nominale del convertitore. Durante il processo di impostazione, accertarsi di
aumentare lentamente dal minimo, fino a raggiungere il momento frenante adeguato e senza
superare la corrente nominale del motore.
F28
39
Frequenza data
Tempo
Frequenza di uscita
Tempo di attesa di frenatura all'arresto
Frequenza della frenatura
Tempo
Tempo di frenatura all'arresto
Comando di marcia
OFF
ON
Comando di arresto
arresto)
Frenatura all'arresto (marcia
~
Frequenza data
Tempo
Frequenza di uscita
Tempo di frenatura all'arresto
Frequenza della frenatura
Tempo di attesa di
frenatura all'arresto
Comando di inversione
COMANDO DI
RETROMARCIA
COMANDO
DI ARRESTO
Tempo
Frequenza data
Frenatura all'arresto (inversione)
Frequenza data
Frequenza della frenatura
Tempo di attesa di
frenatura all'arresto
Frequenza di uscita
Tempo
Frequenza della frenatura
Tempo di frenatura all'arresto
Comando di marcia
Tempo
ON
Comando di arresto
Frenatura all'arresto (Stato di marcia)
Arresto della macchina in
0
decelerazione
F32
0
No
Arresto libero della
1
macchina
Quando il convertitore riceve il comando di arresto, il convertitore determinerà la
modalità in base ai parametri di controllo impostati.
0: In modalità di decelerazione per l’arresto del convertitore, il convertitore si arresta dopo
aver raggiunto decelerazione in base alla modalità di decelerazione impostata fino alla
frequenza più bassa.
1: in modalità di arresto libero, dopo aver ricevuto il comando di arresto il convertitore
Impostazione
della modalità di
arresto
40
interrompe immediatamente l’uscita e si arresta in base al funzionamento libero del carico
di inezia.
Tempo di
F33
0.0~3200.0
s
1.0
No
accelerazione
della marcia jog
Tempo di
F34
0.0~3200.0
s
1.0
No
decelerazione
della marcia jog
Senso della marcia jog:
0
avanti
Senso ella marcia jog:
1
1 bit retromarcia
Senso della marcia jog:
direzione stabilita dal
2
terminale principale
Modalità di fine della
0
marcia jog: arresto del
marcia
10
Modalità di fine della
bit
marcia jog: recupero
1
delle impostazioni
Impostazione
precedenti del jog.
000
No
F35
della modalità
Tempo di accelerazione e
jog
decelerazione dopo la
fine della marcia jog:
recupero delle
0
impostazioni precedenti
del tempo di
accelerazione e
100
decelerazione del jog:
bit
Tempo di accelerazione e
decelerazione dopo la
fine della marcia jog:
conservazione delle
1
impostazioni del tempo
di accelerazione e
decelerazione del jog:
Impostazione
Limite minimo della frequenza ~
Hz
6.00
Si
F36
della frequenza
limite massimo della frequenza
della marcia jog
La configurazione del tempo di accelerazione e decelerazione della marcia jog definisce
una stessa fase di accelerazione/decelerazione.
Il senso della marcia jog è definita a 1 bit di F35, quando il comando jog non
comprende la direzione job, la direzione della marcia jog sarà data dalla direzione della
funzione specificata a 1 bit di F35. Il bit è impostato su 2, la direzione della marcia jog è
decisa dal terminale o dal senso di funzionamento precedente.
Lo stato di funzionamento al termine della marcia jog, è stabilito a 10 bit di F35.
È possibile scegliere se mantenere o meno il tempo di accelerazione e decelerazione
della marcia jog al termine della marcia jog per mezzo di 100 bit di F35.
41
Frequenza massima
F33
F34
Tempo di funzionamento
Accelerazione-decelerazione lineare
Limite minimo
0.00~frequenza massima
Hz
0.00
Si
della frequenza
annullata 1
Limite massimo
F38
0.00~frequenza massima
Hz
0.00
Si
della frequenza
annullata 1
Limite minimo
0.00~frequenza massima
Hz
0.00
Si
F39
della frequenza
annullata 2
Limite massimo
F40
0.00~frequenza massima
Hz
0.00
Si
della frequenza
annullata 2
Limite minimo
F41
0.00~frequenza massima
Hz
0.00
Si
della frequenza
annullata 3
Limite massimo
0.00~frequenza massima
Hz
0.00
Si
F42
della frequenza
annullata 3
Durante il funzionamento è possibile annullare la risonanza immanente del sistema della
macchina utilizzando la modalità di annullamento.
È possibile impostare l’annullamento di tre punti di risonanza al massimo.
F37
Frequenza di uscita
Frequenza annullata 1
Frequenza annullata 2
Limite massimodella
frequenza annullata 1
Limite minimo della
frequenza annullata 1
Limite massimodella
frequenza annullata 2
Limite minimo della
frequenza annullata 2
Limite massimodella
frequenza annullata 3
Limite minimo della
frequenza annullata 3
Frequenza annullata 3
Segnale della frequenza impostato
Il limite minimo della frequenza annullata e il limite massimo della frequenza annullata
definiscono la gamma delle frequenze annullate.
Nel processo di accelerazione e decelerazione, la frequenza di uscita dell'invertitore può
attraversare regolarmente la zona delle frequenze annullate.
F43
Frequenza di reset 0.00~frequenza massima
Hz
0.00
Si
Tempo di lavoro
F44
della frequenza di 0.0~60.0
S
0.0
Si
reset
42
All’avvio del convertitore, all’inizio si utilizza la frequenza predefinita definendo il
tempo di lavoro come il tempo di lavoro della frequenza di rest e il convertitoe funziona in
base alla frequenza di impostazione.
Il funzionamento della marcia jog non è influenzata dalla frequenza di reset.
Senso di comando:
comando di avanzamanto
0
FWD del motore
1 bit
Senso di comando:
1
comando di retromarcia
FWD del motore
Senso di
Comando di priorità:
0 marcia del
F45
0100
no
morsetto/tastierino
10 bit
motore
Comando di priorità: dati
1
analogici positivi e negativi
Permesso di inversione:
0
inversione vietata
100
bit
Permesso di inversione:
1
inversione consentita
1: Bit: utilizzato per cambiare il senso di marcia del motore.
0: Il comando di avanzamento FWD permette al motore in avanzare.
1: Il comando di avanzamento FWD permette al motore di procedere in inversione.
10 bit: è possibile azionare un'inversione di marcia del motore attraverso il tastierino su
potenziometro e il valore positivo o negativo di ingresso analogico .
0: comando principale: morsetto/ tastiera, l’impostazione della frequenza può avere un
valore negativo, ma il senso di marcia è deciso dal morsetto e dal tastierino.
1: comando principale: valore positivo o negativo dell’ingresso analogico,
l’impostazione di un valore positivo della frequenza lascia avanzare il motore mentre
l'impostazione di un valore negativo della frequenza esegue l’inversione del motore.
100 bit: permesso di inversione del motore. Per alcune attrezzature di produzione,
l’inversione può causare danni alle attrezzature. Questa funzione può essere utilizzata per
impedire l’inversione del motore. Quando il senso di rotazione del motore non coincide
con il senso di marcia della macchina, è possibile scambiare due morsetti di uscita del
convertitore per permettere che il senso di marcia della macchina coincida con il senso di
marcia del motore.
0: inversione vietata
1: inversione consentita
Tempo di arresto
F46
0.0~60.0S
S
0
No
superiore a 0
Impostando questo parametro è possibile realizzare effettivamente il cambiamento dal
senso di avanzamento al senso di inversione del convertitore (oppure dal senso di
inversione al senso di avanzamento) quando il tempo di attesa di marcia supera 0.
43
Frequenza di uscita
F47
Tempo di funzionamento
Impostazione
×1
0
0
No
moltiplicazione
×10
1
della frequenza
0: l’mpostazione dell’accuratezza di visualizzazione della frequenza è 0,01 Hz, in caso di
accuratezza, la gamma delle impostazioni della frequenza massima F12 è 10.00 ~
320.00Hz.
1: l’impostazione dell’accuratezza di visualizzazione della frequenza è 0.1 Hz, in caso di
accuratezza, la gamma delle impostazioni della frequenza massima F12 è 100,0 ~ 800.0Hz.
Dopo aver impostato questi parametri, è necessario reimpostare la frequenza massima F12.
Voci di
Tempo di accelerazione non
configurazione
F48
0000
No
0 impostato
dell’accelerazio
ne e
Impostazione data con
1
decelerazione
analogico esterno A1
Impostazione data con
2
analogico esterno A2
1 bit
Impostazione data con
3
analogico esterno A3
Impostazione con tastierino
4
su potenziometro
Impostazione data con
5
tensione digitale multisegmento
Tempo di decelerazione non
0
impostato
Impostazione data con
1
analogico esterno A1
Impostazione data con
2
analogico esterno A2
10 bit
Impostazione data per
3
analogico esterno A3
Impostazione data con
4
potenziometro del tastierino
Impostazione data con
5
tensione digitale multi-fase
Tempo di accelerazione: ×
100
0
secondo
bit
Tempo di accelerazione: ×
1
minuto
F47
44
Tempo di accelerazione: ×
2
ora
Tempo di accelerazione: ×
3
giorno
Tempo di accelerazione: ×
0
secondo
Tempo di accelerazione: ×
1
minuto
1000
bit
Tempo di accelerazione: ×
2
ora
Tempo di accelerazione: ×
3
giorno
1 bit: modalità di impostazione del tempo di accelerazione
Tempo di
0 accelerazione non
Non impostato
impostato
Impostazione data
Tempo di accelerazione reale= rapporto dato al
1
con analogico
tempo di accelerazione * AI1
Tempo di accelerazione reale= rapporto dato al
Impostazione data
tempo di accelerazione * AI2
2 con analogico
esterno A2
Impostazione data
Tempo di accelerazione reale = rapporto dato al
3 con analogico
tempo di accelerazione * AI3
Impostazione data
Tempo di accelerazione reale = rapporto dato al
4 con potensiometro
tempo di accelerazione * potenziometro del
del tastierino
tastierino
Impostazione data
Tempo di accelerazione reale = rapporto dato al
5 con tensione digitale
tempo di accelerazione * tensione digitale multi10 bit: modalità di impostazione del tempo di decelerazione
Tempo di
0 accelerazione non
Non impostato
impostato
Impostazione data
Tempo di decelerazione reale = rapporto dato al
1 con analogico
tempo di accelerazione * AI1
esterno A1
Tempo di decelerazione reale = rapporto dato al
Impostazione data
tempo di accelerazione * AI2
2 con analogico
esterno A2
Tempo di decelerazione reale = rapporto dato al
Impostazione data
tempo di accelerazione * AI3
3 con analogico
esterno A3
45
Impostazione data
5 con tensione digitale
multi-fase
Tempo di decelerazione reale = rapporto dato al
tempo di decelerazione * tensione digitale multisegmento
100 bit, 1000 bit: unità del tempo di accelerazione e decelerazione di marcia in fase 0 del
processo di marcia.
100
Gamma visualizzata (ad esempio
Tempo di
bit,
F09,F10=3200.0)
accelerazione1000
decelerazione
bit
3200.0 secondi
× secondo
0
3200.0 minuti
× minuto
1
3200.0 ore
× ora
2
3200.0
giorni
× giorno
3
Senso di marcia:
0
avanzamento
1 bit
Seonso di marcia:
1
inversione
Voci di
Tempo di marcia: ×
impostazione
0
F49
0000
No
secondi
del
Tempo di marcia: ×
funzionamento
1
10 bit
minuti
Tempo di marcia: × ore
2
Tempo di marcia: × giorni 3
Impostazione dell’unità di tempo della marcia reale. Ha effetto solo durante il processo di
marcia.
1 bit: quando il processo di marcia ha una velocità multi fase, 1 bit imposta il senso di marcia
della velocità di fase 0.
Senso di marcia
Valore impostato
Avanzamento
0
inversione
1
Con modalità di controllo di funzionamento F05=0/1/2, si controlla il senso di marcia della
velocità in fase 0.
Con modalità di controllo di funzionamento F05=3, il valore impostato e i morsetti
FWD/REV decidono il senso di marcia a velocità in fase 0, FWD ha la precedenza.
FWD= senso di marcia
1
REV= senso di marcia 1
Valore impostato
Avanzamento
inversione
0
inversione
Avanzamento
1
10 bit: unità del tempo di marcia a velocità in fase 0 durante il processo di marcia.
46
Tempo di marcia
10 bit
Gamma di visualizzazione ( ad esempio
H18~H25=3200.0)
× secondi
0
3200.0 secondi
× minuti
1
3200.0 minuti
× ore
× giorni
2
3200.0 ore
3
3200.0 giorni
Percentuale della marcia a
30~100
%
100
No
risparmio energetico
Questo parametro descrive la percentuale della tensione di uscita minima della marcia con
risparmio energetico. Nella marcia a velocità costante, il convertitore può calcolare
automaticamente il carico fornito per l’ottimizzazione della tensione di uscita. Durante i
processi di accelerazione e decelerazione non è possibile effettuare questi calcoli. La
funzione di risparmio energetico è un obiettivo di risparmio energetico ottenibile attraverso
la riduzione della tensione di uscita e il miglioramento del fattore di potenza e questo
parametro determina il valore minimo di riduzione dei tempi di tensione di uscita; se ad
esempio questo parametro è impostato su 100%, significa che è stata disattivata la funzione
a risparmio energetico.
Quando la funzione di risparmio energetico è in funzione, il valore effettivo della tensione
di uscita del convertitore = tensione nominale in uscita del convertitore × la percentuale di
tensione di uscita × la percentuale di tensione di uscita di risparmio energetico durante il
funzionamento con risparmio energetico.
F50
Tensione di uscita
100%
75%
Frequenza Hz
47
5-4 FUNZIONI PERSONALIZZATE GRUPPO
codi
ce
dettagli/schermo
LCD
A00
A01
A02
opzione di
monitoraggio 1
opzione di
monitoraggio 2
opzione di
monitoraggio 3
cod
ice
Schermo su
tastierino
gamma delle impostazioni dello
schermo LCD a 7 fasi
numero del
gruppo di
parametro
100 bit/100 bit
Numero del
parametro
10 bit/ 1 bit
00~0B
numero del
gruppo di
parametri
0~63(0x00~0x3F)
dettagli
della
funzione
unità
-
impo
stazi
oni
di
fabb
rica
0B0
0
0B0
1
0B0
2
numero del parametro
( 16 ingressi binari)
gruppo delle
funzioni di
0B
S
0~16 (0x00~0x10)
monitoraggio
gruppo delle
F funzioni di
00
F
0~60 (0x00~0x3C)
base
gruppo delle
A funzioni
01
A
0~56 (0x00~0x38)
utente
delle
o gruppo
02
o
0~61 (0x00~0x3D)
funzioni IO
gruppo della
H velocità
03
H
0~56 (0x00~0x38)
multifase del
PLC
della
U gruppo
04
U
0~16 (0x00~0x10)
curva V/F
delle
P gruppo
05
P
0~13 (0x00~0x0D)
funzioni PID
gruppo delle
E funzioni di
06
E
0~14 (0x00~0x0E)
estensione
gruppo dei
C parametri
07
C
0~32 (0x00~0x20)
della velocità
dell'anello
gruppo dei
b parametri del
08
b
0~23 (0x00~0x17)
motore
gruppo dei
y parametri del
09
y
0~18 (0x00~0x12)
sistema
impostazioni dei parametri bisogno di 16 input numero esadecimale.
S
48
cambia
mento
del
limite
si
si
si
Per selezionare il numero del parametro è necessario inserire 16 codici binari.
L'opzione 1 del monitor all'avvio del motore, stabilisce il contenuto da visualizzare sul
tastierino.
Esempio: frequenza reale S01 dell’opzione del monitor 1, A00 = 0x0B01.
Stato dei morsetti DI1 ~ 4 dell'opzione o57 del monitor 2, A01 = 0x0239.
Stato della velocità multifase H55 dell'opzione del monitor 3, A02 = 0x0337.
protezione dello
assente
0
A03 stallo di
1
si
presente
1
sovratensione
tensione della
protezione dello
110%~140% (tensione bus standard)
%
120
si
A04
stallo di
sovratensione
0: Questa funzione non è valida
1: Questa funzione è valida
Quando il convertitore è in fase di decelerazione, a causa dell'impatto dell’inerzia sul
carico del motore, la tensione del motore può generare tensione di retroazione fino alle
parti interne del convertitore, con conseguente aumento di tensione continua e
superamento del valore massimo consentito. Quando si seleziona la funzione di
protezione dello stallo di sovratensione, il convertitore esegue un controllo della
tensione continua, se questa tensione è troppo alta, il convertitore arresta il
rallentamento (la frequenza di uscita rimane invariata), quando la tensione continua è
inferiore al valore impostato, il convertitore inizia nuovamente il rallentamento.
Questa funzione deve essere impostata su "0" con tipologie di frenatura rigenerativa e
resistenza di frenatura esterna.
tensione di corrente diretta
tempo
tensione di uscita
tempo
Assente
0
Funzione di
regolazione
Presente
1
A05
0
Si
della tensione
Presente, non utilizzabile
2
automatica
durante la decelerazione
Il CPU rileva automaticamente la tensione DC bus del convertitore ed effettua in tempo
reale ottimizzazione della gestione, con fluttuazione di tensione di rete, la fluttuazione della
tensione di uscita è molto bassa, la caratteristica V / F è sempre collegata all'impostazione di
tensione di ingresso nominale.
0: Nessuna delle funzioni.
1: Funzione disponibile.
2: Funzione disponibile, ma non può essere utilizzata in decelerazione.
A06
Opzioni di frenatura Assente
0
Si
0
49
Modalità di sicurezza
1
Modalità normale
2
0~10%
110%~140% (tensione bus
standard)
Tensione di isteresi
%
2
Si
Tensione di
A08
%
130
Si
frenatura dinamica
0: assente.
1: in modalità di sicurezza, solo durante il processo di decelerazione del convertitore, si
attiva la frenata dinamica quando si individua DC bus ad alta tensione che superano un
determinato valore.
2: in modalità normale, in qualsiasi stato si trovi il convertitore, si attiva la frenatura
dinamica quando si individua un bus ad alta tensione in corrente continua che supera un
determinato valore.
Quando il funzionamento del convertitore è in decelerazione rapida o con alte fluttuazioni
di carico, è possibile che si verifichi un eccesso di tensione o un eccesso di corrente. Questo
fenomeno è più frequente quando è maggiore l’inerzia del carico. Le parti interne del
motore rilevano DC bus ad alta tensione che superano un certo valore e il segnale di
frenatura di uscita introduce la frenatura dinamica per mezzo della resistenza di frenatura
esterna. Gli utenti possono selezionare modelli di convertitore con funzione di frenatura da
applicare a questa funzione.
Livello di
A09
%
70
Si
60%~75% (tensione bus DC)
sottotensione
Definisce la tensione minima in corrente continua durante i normali tempi di operatività
del convertitore, in alcune situazioni di bassa potenza, può essere adatta per ridurre il livello
di tensione al fine di garantire al convertitore di operare.
In circostanze normali, mantenere le impostazioni di fabbrica.
Assente
0
Modalità
tracciatura
Opzione di tracciatura in
1
0
Si
A10
in spegnimento
spegnimento
Modalità tracciattura
2
in avvio
Tempo di tracciatura in
A11
0.0~20.0
S
0.0
Si
spegnimento
Questo parametro viene utilizzato per selezionare la modalità di tracciatura del
convertitore.
0: tracciatura della velocità N, cioè da 0Hz oppure dall’avvio iniziale della frequenza di
avvio.
1: tracciatura in spegnimento, quando il convertitore si riavvia da una fase di spegnimento
istantaneo continua a operare a velocità e direzione precedenti.
Se il tempo di spegnimento è più lungo del tempo impostato A11, il convertitore non si
riavvia nuovamente dopo convertitore non si riaccende dopo il ripristino dell’alimentazione.
2: tracciatura in avvio, in alimentazione si verifica per prima cosa la velocità e il senso del
motore e il convertitore continua a operare a velocità e direzione precedenti.
Impostando la modalità di tracciatura all’avvio, la funzione di tracciatura in spegnimento è
in funzione.
A07
50
Corrente di uscita
Power Down
Controllo Frequenza
Frequenza di
conversione
A11
Velocità di
rotazione del
motore
Velocità di
rotazione del
motore
Frequenza d'uscita
Frequenza di uscita
Stato di tracciatura all'avvio
Condizione di tracciatura in spegnimento
A12
A13
Punto di frequenza
in spegnimento
Tempo di caduta
della frequenza di
spegnimento
Velocità di ricerca
60%~75% (tensione DC bus)
0.1~3200.0
%
75
Si
s
5.0
Si
L’impostazione corretta di questo parametro permette al convertitore di non andare in
arresto di sottotensione in fase di spegnimento istantaneo. Quando la caduta di tensione bus
DC raggiunge il punto della frequenza di spegnimento impostato con A12, il convertitore
arresta la potenza di uscita di carico per mezzo della decelerazione del tempo di
decelerazione impostato con A13. Attraverso l’energia di retroazione di carico, si compensa
il limite minimo della tensione continua al fine di mantenere per breve tempo i convertitore
in funzione.
Il tempo di caduta della frequenza di spegnimento è in realtà il tempo di decelerazione
durante il processo di caduta della frequenza di spegnimento.
Se il valore è troppo alto, l'energia di retroazione del carico è bassa e non è possibile
compensare la caduta di tensione continua.
Se questo valore è troppo basso, l’eccessiva compensazione di energia può causare
guasti di sovratensione al convertitore.
Con impostazione A12 su 100%, si annulla la funzione di frequenza di spegnimento.
A14
Funzione limite di
corrente
Assente
0
Presente
1
-
0
Si
Tempo di caduta del
limite
Punto di protezione di
A16
decelerazione del limite
Punto di protezione delle
A17
velocità costante del limite
A15
La funzione del limite di corrente può effettivamente contenere la sovracorrente causata
da fluttuazioni del carico del motore in fase di accelerazione e decelerazione o il
funzionamento a velocità costante.
Questa funzione produce un effetto positivo sulla modalità di controllo V / F.
In condizione di protezione di perdita di velocità, la velocità del motore scende, quindi
non è adattato a sistemi che non permettono una riduzione automatica della velocità.
Nel processo di funzionamento, quando la corrente del motore supera il valore
impostato A16, il motore rallenta il funzionamento secondo il tempo impostato da A15, fino
51
a che la corrente scende al di sotto del valore impostato.
Nel processo di funzionamento, quando il motore supera il valore impostato A17, il
motore mantiene questa velocità di funzionamento a fino a che la corrente scende al di sotto
del valore impostato.
Il limite della corrente di decelerazione ha la priorità sul limite di corrente.
A18
Protezione della fase di
uscita
Protezione della fase
non disponibile
Guardia e
funzionamento
Guardia e arresto della
macchina in
decelerazione
Guardia e arresto libero
Livello massimo di
A19
protezione della fase
0
1
-
0
Si
%
30
Si
2
3
10~100
Quando il rapporto di squilibrio della corrente di uscita trifase supera il livello massimo
di protezione della fase A19, si aziona la protezione della fase di uscita e il sistema
Visualizza l’errore PH-O. Quando la frequenza di uscita è inferiore a 2.00Hz, la protezione
della fase non è attiva.
Livello massimo di protezione fase = differenza max tra le fasi decisa a seconda della
condizione di carico.
A20
A21
A22
opzione di reazione
di individuazione di
coppia eccessiva
livello massimo di
individuazione della
coppia eccessiva
tempo di
individuazione della
coppia eccessiva
rivelazione di coppia
accessiva
0
guardia e funzionamento
1
-
0
si
10~250
%
150
si
0.0~60.0
s
0.1
si
guardia e arresto della
macchina in decelerazine
guardia e arresto libero della
macchina
2
3
La corrente di uscita del motore supera A21, azione di rivelazione della coppia
eccessiva, il sistema visualizza l’errore OL2.
A23
opzione di
protezione
termoelettrica
no
0
si
1
-
1
si
Questa funzione è per proteggere il motore quando questo si surriscalda a causa
dell’assenza di altri relè termici. Il convertitore utilizza alcuni parametri per calcolare
l'aumento della temperatura del motore e al tempo stesso determina se l'uso di corrente ha
causato il surriscaldamento del motore. Quando si sceglie la funzione di protezione
termoelettrica, il convertitore chiude l'uscita e mantiene le informazioni di protezione dal
rilevamento al surriscaldamento.
0: funzione non disponibile.
1: funzione disponibile.
A24
livello massimo di
120~250
52
%
★
si
protezione
termoelettrica
Questo è il livello massimo di corrente impostato quando il convertitore diagnostica il
surriscaldamento del motore. Quando la corrente è il prodotto della corrente nominale del
motore e di questo parametro, il convertitore protegge entro 1 minuto, in altre parole la
corrente reale entro 1 minuto dalla protezione di surriscaldamento è due volte A24 della
corrente nominale.
I parametri di ripristino di fabbrica sono tipo F a 120%, tipo G / a 150%, tipo Z / M / T a
180% e tipo H a 250%.
tempo di protezione
20min
5min
1min
0.2s
A24
A25
frequenza di reimpostazione
dell'errore
0~10
%Ia
-
0
si
Nel processo di funzionamento del convertitore, quando si verifica sovracorrente OC o
sovratensione OU, il convertitore può recuperare automaticamente e funzionare in base alla
situazione impostata prima del guasto. Il tempo di recupero è conforme a questo parametro.
L'impostazione massima è 10 volte. Quando questo parametro è impostato su "0", il
convertitore non recupera automaticamente dopo il guasto. Tuttavia se il relè DC principale
incontra il guasto del circuito MCC o il guasto di sottotensione LU, il convertitore si
ripristina automaticamente senza limiti.
Se il tempo di funzionamento normale dopo un guasto supera 36s, il convertitore
ripristina la frequenza di reset del guasto stabilita all'origine.
Se il tempo di funzionamento normale dopo un guasto supera 36s, il convertitore
ripristina il gruppo del parametro di controllo visulizzato sul display del tastierino.
Se il tempo in cui si è verificato il guasto supera 10 s, il convertitore non ripristina la
funzione di reset del guasto.
A26
tempo di reset del guasto
0.5~20.0
s
1.0
si
Impostazione dell'intervallo di tempo del reset automatico del guasto. Dopo l'arresto
della macchina per guasto, si attiva il reset automatico del guasto se si rileva che il tempo
del guasto è maggiore del tempo di reset del guasto.
A27
temperaura di avvio del
ventilatore
0.0~60.0
℃
0.0
si
Impostazione della temperatura di avvio del ventilatore. Il ventilatore viene azionato
quando la temperatura reale è superiore alla temperatura di impostazione.
Per non evitare arresti e avvii frequenti del ventilatore, la temperatura di arresto del
ventilatore è uguale alla temperatura A27 di avvio del ventilatore -1.0.
A28
indirizzo di comunicazione della
macchina
1~128
-
8
si
Indirizzo di comunicazione della macchina: un numero unico per distinguere questo
convertitore dagli altri.
Intervallo da 1 a 127 è la gamma di indirizzi dal convertitore, è possibile ricevere i
comandi, inviare lo stato dal convertitore. Per maggiori dettagli fare riferimento
53
all'appendice 1.
Funzione di collegamento proporzionale:
Host di collegamento proporzionale:
Indirizzo di comunicazione del presente convertitore = 128,
L'interfaccia di comunicazione A è impostata come porta di comunicazione su una porta di
comunicazione dell'host di collegamento proporzionale.
L'interfaccia di comunicazione B funge da interfaccia del tastierino o da interfaccia bit sul
PC.
Slave di comunicazione proporzionale:
Indirizzo di comunicazione del presente convertitore = 1 ~ 127,
La porta di comunicazione A e la porta di comunicazione B possono essere impostate
come porta di comunicazione slave della comunicazione proporzionale.
Per maggiori dettagli, fare riferimento all’appendice 2.
A29
tasso di baud
tasso baud 1200
0
tasso baud 2400
1
tasso baud 4800
2
tasso baud 9600
3
tasso baud 19200
4
tasso baud 38400
5
-
3
si
Il tasso baud della porta di comunicazione A può essere impostato di conseguenza.
Il tasso baud della porta di comunicazione B è fisso su 19200bps.
A30
modalità di
comunicazione
8,N,1 for RTU
0
8,N,2 for RTU
1
8,E,1 for RTU
2
8,O,1 for RTU
3
8,E,2 for RTU
4
8,O,2 for RTU
5
-
0
si
-
0
si
s
10
si
Per maggiori dettagli fare riferimento all’appendice.
A31
A32
gestione degli
errori di
comunicazione
tempo di
individuazione del
ritardo
Guardia non attiva
0
Guardia e avazamento
1
Guardia e arresto della
macchina in decelerazione
2
guardia e arresto libero della
macchina
3
0: non individuato
1~250: individuazione del ritardo
Quando l'intervallo del tempo comunicazione normale tra la porta A o B supera il tempo
di rilevamento del ritardo A32, il sistema effettuerà un controllo secondo l'impostazione
A31.
Dopo l'accensione, il morsetto con interfaccia non comunicante, non potrà gestire
l'avviso.
A33
Impostazione del
Azzeramento automatico dopo
54
0
-
1
si
l'avvio
tempo totale
Proseguimento del conteggio
dopo l'avvio
1
Impostazione per il tempo totale di ogni utilizzo della macchina.
0: azzeramento automatico dopo l'avvio.
1: proseguimento del conteggio dopo l'avvio.
A34
unità di misura del
tempo totale
ora
0
giorno
1
-
0
si
Impostazione dell'unità di misura del tempo totale, usata solo per visualizzare il tempo
totale di funzionamento.
0: impostando l'ora come unità di misura si visualizza 0~3200,0 ore.
1: impostando il giorno come unità di misura si visualizza 0~3200,0 giorni.
A35
regolazione
veloce dell'uscita
del motore
0.1~1000.0
%
100.0
si
Utilizzato per regolare la visualizzazione della velocità effettiva di marcia, vedere
opzione del monitor A00 ~ A02: velocità di marcia reale del motore 6.
Impostando il 100%, l'unità di misura di visualizzazione corrispondente è rpm.
Dopo la regolazione, la velocità massima che può essere visualizzata è 9999.
A36
regolazione della
potenza del
motore
0.1~1000.0
%
100.0
si
Utilizzato per regolare la visualizzazione della potenza di uscita del motore, vedere
opzione del monitor A00 ~ A02: potenza del motore 11.
Impostando il 100%, l'unità di misura di visualizzazione corrispondente è %.
Dopo la regolazione, la velocità massima che può essere visualizzata è 9999.
A37
opzione della
funzione blocco
tastiera
0~SPENTO
7
6
5
4
3
2
1
2 2 2 2 2 2 2 2
7 6 5 4 3 2 1 0
-
SPENTO
si
0
FWD
STOP
PRG
SET
ESC
MF1
MF2
POTENZIOMETRO
Attraverso i tasti su tastierino SET + ESC è possibile attivare e annullare la funzione
blocco della tastiera
Il tasto che possiede proprietà di bloccaccio è stabilito dal parametro corrispondente:
Impostazione 0~10 bit
0
1
tasto di blocco
0
tasto FWD senza blocco
1
tasto FWD con blocco
0
tasto STOP senza blocco
1
tasto STOP con blocco
55
3
4
5
6
7
1
tasto PRG con blocco
0
tasto SET senza blocco
1
tasto SET con blocco
0
tasto ESC senza blocco
1
tasto ESC con blocco
0
tasto MF1 senza blocco
1
tasto MF1 con blocco
0
tasto MF2 senza blocco
1
tasto MF2 con blocco
0
potenziomentro senza blocco
1
potenziometro con blocco
1 bit
10 bit
A38
controllo UP/DN
100 bit
1000 bit
conservazione in
spegnimento
azzeramento in
spegnimento
mantenimento in arresto
della macchina
azzeramento durante il
comando di arresto
azzeramento durante il
termine di arresto
0
1
0
1
-
0000
si
2
adeguamento senso unico
0
adeguamento doppio
senso
1
adeguamento non valido
0
adeguamento valido
1
1 bit: stato di conservazione in spegnimento del comando UP / DN
0: Conservazione in spegnimento
1: Azzeramento in spegnimento
10 bit: Mantenimento del comando UP / DN
0: mantenimento in arresto
1: azzeramento in comando di arresto
2: azzeramento in fine di arresto
100 bit: senso di regolazione del comando UP / DN
0: regolazione a senso unico, la gamma di regolazione del senso è 0 ~ frequenza
massima.
1: regolazione a doppio senso, la gamma di frequenza dell’inversione in entrambi i
sensi.
1000 bit: validità della funzione regolazione del comando UP / DN 0: funzione UP / DN
non valida
1: funzionare UP / DN valida
A39
Tempo UP/DN
1 bit
10 bit
Velocità costante UP
0
Impostazione a tempo UP
1
Velocità costante DN
0
56
-
0000
No
Impostazione a tempo DN
100 bit
1000
bit
Non regolazione del tasso
di regolazione UP
Regolazione da
impostazione analogico
esterno AI1
Regolazione da
impostazione analogico
esterno AI2
Data regolazione
analogico esterno AI3
Regolazione da
impostazione tastierino
del potenziometro
Regolazione da
impostazione tensione
digitale multifase
Non regolazione del tasso
di regolazione DN
Regolazione da
impostazione analogico
esterno AI1
Regolazione da
impostazione analogico
esterno AI2
Regolazione da
impostazione analogico
esterno AI3
Regolazione da
impostazione tastierino
del potenziometro
Regolazione da
impostazione tensione
digitale multi-fase
1
0
1
2
3
4
5
0
1
2
3
4
5
1 bit: modalità accelerata UP
0: accelerazione costante data da A41 costante: la frequenza aumenta ogni 200ms
1: accelerazione a tempo data da A41 a tempo: la frequenza aumenta a ogni innesco
10 bit: modalità decelerata DN
0: decelerazione costante data da A42 costante: la frequenza aumenta ogni 200ms
1: decelerazione a tempo data da A42 a tempo: la frequenza aumenta a ogni innesco
100: modalità regolata del tasso di regolazione UP
0
Non regolazione del tasso
di retroazione UP
Non regolato
57
2
Regolazione da
impostazione analogico
esterno AI2
Tasso di regolazione effettiva UP = rapporto
dato al tempo di accelerazione A41*AI2
3
Regolazione da
impostazione analogico
esterno AI3
Tasso di regolazione effettiva UP= rapporto
dato al tempo di accelerazione A41*AI3
4
Regolazione da
impostazione tastierino del
potenziometro
Tasso di regolazione effettiva UP = rapporto
dato al tempo di accelerazione *
potenziometro del tastierino
5
Regolazione da
impostazione tensione
digitale multi-fase
Tasso di regolazione effettiva UP = rapporto
dato al tempo di accelerazione * tensione
digitale multi-fase
1000 bit: modalità di regolazione del tasso di regolazione DN
0
Non regolazione del
tempo di
accelerazione
1
Regolazione da
impostazione
analogico esterno AI1
2
Regolazione da
impostazione
analogico esterno AI2
3
Regolazione da
impostazione
analogico esterno AI3
Tasso di regolazione effettiva DN= rapporto dato
al tempo di accelerazione * AI3
4
Regolazione da
impostazione tastierino
su potenziometro
Tasso di regolazione effettiva DN= rapporto dato
al tempo di accelerazione * potenziometro del
tastierino
5
Regolazione da
impostazione tensione
digitale multi-fase
Tasso di regolazione effettiva DN= rapporto dato
al tempo di accelerazione * tensione digitale
multi-fase
A40
Non regolato
Tasso di regolazione effettiva DN= rapporto dato
al tempo di accelerazione * AI1
Tasso di regolazione effettiva DN= rapporto dato
al tempo di accelerazione * AI2
Valore di regolazione UP/DN
-300.00~300.00
-
0.00
No
Dopo la regolazione, la fequenza data=frequenza data + valore di regolazione UP/DN.
A41
Tasso di regolazione UP
0.01~20.00
Hz
0.01
Si
Hz
0.01
Si
Velocità costante: la frequenza aumenta ogni 200ms.
Velocità a tempo: la frequenza aumenta a ogni innesco.
A42
Tasso di regolazione DN
0.01~20.00
Velocità costante: la frequenza aumenta ogni 200ms.
Velocità a tempo: la frequenza aumenta a ogni innesco.
A43
A44
Definizione del
tasto MF1
multifunzione
Tasto MF definito come tasto di
accelerazione
Tasto MF definito come tasto di
decelerazione
58
-
0
1
Si
Definizione del
tasto MF2
multifunzione
Tasto MF definito come tasto di
arresto libero
Tasto MF definito come tasto
marcia FWD
Tasto MF definito come tasto
marcia REV
Tasto MF definito come tasto FWD
jog
Tasto MF definito come tasto REV
Jog
Tasto MF definito come tasto Jog
Tasto MF definito come tasto UP
Tasto MF defnito come tasto
DOWN
L'utente che definisce il tastierino, può definire liberamente le funzioni dei tasti MF.
0: Tasto MF definito come tasto di accelerazione:
Nel menu del monitor, il tasto funzione di accelerazione MF può modificare la frequenza di
accelerazione impostata dal tastierino F01.
Nel menu di scelta dei parametri, il tasto funzione di accelerazione MF può regolare la
scelta dei parametri.
Nel menu di modifica dei parametri, il tasto funzione di accelerazione MF può regolare il
valore del parametro.
1: Tasto MF definito come tasto di decelerazione:
Nel menu del monitor, il tasto funzione di decelerazione MF può modificare la frequenza di
decelerazione impostata dal tastierino F01.
Nel menu di scelta dei parametri, il tasto funzione di decelerazione MF può regolare la
scelta dei parametri.
Nel menu di modifica dei parametri, il tasto funzione di decelerazione MF può regolare il
valore del parametro.
2: Tasto MF definito come tasto di arresto libero:
Nel menu del monitor, nel sottomenu di scelta dei parametri l'attivazione del tasto è
valida e il convertitore si arresta liberamente. Dopo l’arresto automatico è assente un
comando di avvio. Dopo 1S è consentito il riavvio.
3: Tasto MF definito come tasto marcia FWD:
Nel menu del monitor, nel sottomenu di scelta dei parametri l'attivazione del tasto è valida e
il convertitore attiva la marcia
FWD.
4: Tasto MF definito come tasto marcia REV:
Nel menu del monitor, nel sottomenu di scelta dei parametri l'attivazione del tasto è valida e
il convertitore attiva la marcia REV
5: Tasto MF definito come tasto FWD jog:
nel menu del monitor, nel sottomenu di scelta dei parametri l'attivazione del tasto è valida e
il convertitore attiva la marcia jog FWD.
6: Tasto MF definito come tasto REV Jog:
nel menu del monitor, nel sottomenu di scelta dei parametri l'attivazione del tasto è valida e
il convertitore attiva la marcia jog REV.
7: Tasto MF definito come tasto Jog:
nel menu del monitor, nel sottomenu di scelta dei parametri l'attivazione del tasto è valida e
59
il convertitore attiva la marcia jog. Il senso di marcia è deciso impostando 1 bit F35 e il
morsetto.
8: Tasto MF definito come tasto UP:
l’attivazione del tasto è valida in ogni momento, il convertitore attiva il controllo UP, il
parametro di controllo è deciso da A38 ~ A42.
9: Tasto MF definito come tasto DOWN: la pressione di MF è l’attivazione del tasto è
valida in ogni momento, il convertitore attiva il controllo DOWN, il parametro di controllo
è deciso da A38 ~ A42.
A45
potenziometro su ttastierino X1
0~100.0
%
0.0
Si
%
100.0
Si
%
-
Si
Punto di partenza del valore impostato con potenziomentro su tastierino .
A46
potenziometro su tastierino X2
0~100.0
Punto di fine del valore impostato con potenziometro su tastierino.
A47
valore stabilito dal potenziometro su
tastierino.
0.0~100.0%
Visualizza il valore impostato dal potenziometro su tastierino, il valore può essere
modificato attraverso il potenziometro su tastierino presente nel menu del monitor.
Il valore di impostazione del potenziometro su tastierino può essere dato come
frequenza analogica data, frequenza impostata = frequenza massima = valore impostato dal
potenziometro su tastierino.
Il valore impostato dal potenziometro su tastierino può essere dato come valore di
impostazione PID, valore dato PID = valore di impostazione del potenziometro su
tastierino.
A48
A49
tastierino su potenziometro X1
valore corrispondente Y1
potenziometro su tastierino X2
valore corrispondente Y2
valore finale
corrispondente
0.0
Si
-100~100.0
%
100.0
Si
valore inziale
corrispondente
punto inziale
A50
%
valore finale
corrispondente
valore inziale
corrispondente
controllo
potenziometro
su tastierino
-100~100.0
1 bit
10 bit
100 bit
punto finale
punto inziale
salvataggio in
spegnimento
azzeramento in
spegnimento
mantenimento arresto
della macchina
azzeramento in fase di
arresto della macchina
azzeramento in fase
finale della macchina
conservazione
60
0
1
0
1
2
punto finale
-
0000
si
1000
bit
conservazione
1 bit: salvataggio in spegnimento del potenziometro du tastierino
0: mantenimento in spegnimento
1: azzeramento in spegnimento
10 bit: mantenimento arresto della macchina impostato da potenziometro su tastierino
0: mantenimento arresto della macchina
1: azzeramento in fase di comando di arresto della macchina
2: azzeramento in fase finale della macchina
A51
regolazione
temperatura del motore
0.0~200.0
%
100.0
No
Utilizzato per modificare la visualizzazione della temperatura del motore A54.
A52
temperatura di
surriscaldamento del
motore
℃
120.0
No
-
0
Si
non reazione al
surriscaldamento del
motore
A53
reazione al
surriscaldamento del
motore
guadia e avanzamento
guardia e arresto della
macchina in
decelerazione
guardia e arresto libero
della macchina
Quando il valore di visualizzazione della temperatura del motore supera il valore
impostato A52, il convertitore reagisce al surriscaldamento del motore con A53 eseguendo
una verifica.
A54
visualizzazione della
temperatura del motore
℃
-50.0~300.0
-
No
Il valore della temperatura del motore misurata con accessorio opzionale PT100 può
essere usato per misurare la temperatura di altre componenti.
A55
tasso del collegamento
proporzionale
0.10~10.00
-
1.00
si
Durante l'utilizzo del collegamento proporzionale, il tasso del collegamento
proporzionale moltiplicato per il rapporto del convertitore quando ha ricevuto il comando di
frequenza di impostazione dal convertitore host. L'impostazione di questo convertitore è
uno slave del collegamento proporzionale all'interno del sistema di collegameno
proporzionale.
Frequenza impostata da tastierino F01 = percentuale collegamento proporzionale ×
frequenza di impostazione S00 dell'host del collegamento proporzionale.
5-5 Gruppo di funzione IO
Gruppo precedente
cod
ice
dettagli/schermo LCD
Gruppo successivo
display LED a 7
frammenti
61
unità
impostazi
oni di
fabbrica
limite
modific
ato
o00
ingresso AI1X1
0~100.0
%
0.0
si
o01
ingresso AI1X2
0~100.0
%
100.0
si
o02
ingresso AI2X1
0~100.0
%
0.0
si
o03
ingresso AI2X2
0~100.0
%
100.0
si
o04
ingresso AI3X1
0~100.0
%
0.0
si
o05
ingresso AI3X2
0~100.0
%
100.0
si
-100~100.0
%
0.0
si
-100~100.0
%
100.0
si
-100~100.0
%
0.0
si
-100~100.0
%
100.0
si
-100~100.0
%
0.0
si
-100~100.0
%
100.0
si
o06
o07
o08
o09
010
o11
ingresso AI1X1 valore
corrispondente Y1
ingresso AI2X 2 valore
corrispondente Y2
ingresso AI2X 1 valore
corrispondente Y1
ingresso AI2X 2 valore
corrispondente Y2
ingresso AI3X 1 valore
corrispondente Y1
ingresso AI3X 2 valore
corrispondente Y2
y
Y2=100%
Y1=0%
AI1,AI2,AI3
(X1,Y1)
X2=100%
X1=0%
x
Frequenza massima=50.00hz
X1=0% ,Y1=0% convertitore 0V frequenza valore corrispondente:f=frequenza
massima×Y1=0.00Hz
X2=100% ,Y2=100% convertitore+10V frequenza valore corrispondente:
f=frequenza massima×Y2=50.00Hz
y
100%
Y2=50%
Y1=0%
AI1,AI2,AI3
(X2,Y2)
(X1,Y1)
X1=20%
X2=50%
62
80% 100%
10V
x
X1=20% ,Y1=0% potenziometro 2V frequenza impostata corrispondente:f=frequenza
massima ×Y1=0.00Hz
X2=50% ,Y2=50% potenziometro 5V frequenza impostata corrispondente:
f=frequenza massima ×Y2=25.00Hz
y
100%
Y2=50%
80%
10V
(X2,Y2)
Y1=20% (X1,Y1)
AI1,AI2,AI3
100%
X1=0% X2=50%
x
X1=0% ,Y1=20% potenziometro 0V frequenza impostata corrispondente:f=frequenza
massima ×Y1=10.00Hz
X2=100% ,Y2=50% potenziometro 5V frequenza impostata corrispondente:
f=frequenza massima ×Y2=25.00Hz
y
(X2,Y2)
100%
Y2=100%
AI1,AI2,AI3
Y1=-100%
X2=100%
50%
5V
100%
10V
x
X1=0%
(X1,Y1)
X1=0% ,Y1=100% potenziometro 0V frequenza impostata corrispondente:f=frequenza
massima ×Y1=50.00Hz
X2=100%,Y2=100% potenziometro 5V frequenza impostata corrispondente:
f=frequenza massima ×Y2=50.00Hz
I ponticelli AI1,AI2,AI3 sono rispettivamente JP3/JP5,JP6,JP7, fare riferimento
alle istruzioni di seguito:
63
o12
o13
o14
Tempo di filtro
ingresso AI1
Tempo di filtro
ingresso AI2
Tempo di filtro
ingresso AI3
0.00~2.00
s
0.10
Si
0.00~2.00
s
0.10
Si
0.00~2.00
s
0.10
Si
Il tempo di filtro ingresso in analogico costante può essere 0.00 ~ 2.00s. Quando il
parametro del tempo è troppo alto, la frequenza impostata si stabilizza ma il tempo di
risposta peggiora; quando il parametro del tempo è troppo basso, la frequenza impostata è
instabile e la velocità di risposta più veloce.
o15
o16
o17
o18
o19
o20
Morsetto di uscita DA1
Morsetto di uscita DA2
Nessuna reazione
0
Frequenza impostata
1
Frequenza reale
2
Corrente reale
3
Tensione di uscita
4
Tensione bus
5
Temperatura IGBT
6
Potenza di uscita
7
Velocità di uscita
8
Valore reale di coppia
9
Regolazione limite minimo
di uscita DA1
Regolazione limite massimo
di uscita DA1
Regolazione limite minimo
di entrata DA2
Regolazione limite massimo
di uscita DA2
Contenuto di uscita
Valore
impostato
-
-
Si
Si
0.0~100.0
%
0.0
si
0.0~100.0
%
100.0
si
0.0~100.0
%
0.0
si
0.0~100.0
%
100.0
si
Definizione gamma di segnali di uscita
Nessuna reazione
0
Nessuna uscita
Frequenza impostata
1
0~frequenza massima
Frequenza reale
2
0~frequenza massima
Corrente reale
3
Tensione di uscita
4
Tensione bus
5
0~200%, parametri correlati:percentuale
corrente di uscita SO3
0~200%, parametri correlati :tensione
nominale del motore b02e b15.
Tensione DC, 0~1000VDC
64
Temperatura IGBT
6
0~100.0℃
Potenza di uscita
7
0~200%
Velocità di uscita
8
0 ~ velocità di marcia massima
Valore reale di coppia
9
Coppia 0~200%
Questo parametro consente di impostare il limite massimo e minimo del segnale di uscita
DA1/DA2.
Uscita massima
corrispondente
DA2
DA1
0Hz
10.0% 20.0% 50.0%
0V/0mA
100.0% Tensione/corrente
10V/20mA
Per esempio:
quando DA1 richiede uscita di tensione 1 ~ 5V, impostare i parametri come segue: 10,0% =
O17, O18 = 50.0%
quando DA2 richiede uscita di corrente 4 ~ 20mA, impostare i parametri come segue: Ø 19
= 20,0%, o20 = 100.0%
Nota: ciascun morsetto di uscita ha l’opzione uscita tensione e l’opzione corrente di uscita,
la tensione di uscita è l'impostazione di default. Quando si seleziona tensione di uscita, è
richiesto DA1V/DA2V di JP1/JP2 in corto (vedi pannello); quando si seleziona la corrente
in uscita, è richiesto DA1C/DA2C di JP1/JP2 in corto.
o21
o22
o23
o24
Opzione 1 segnale di uscita 01
Opzione 2 segnale di uscita 02
Opzione 3 segnale di uscita 03
Opzione 4 segnale di uscita 04
Nessuna funzione
0
Allarme di errore
1
Rilevamento sovracorrente
2
Rilevamento sovraccarico
3
Rilevamento sovratensione
4
Rilevamento sottotensione
5
Rilevamento sottocarico
6
Rilevamento
surriscaldamento
7
Funzionamento in comando
8
65
-
0
0
1
8
Si
Si
Si
Si
Segname anomalie
retroazione PID
9
Inversione del motore
10
Frequenza impostata
raggiunta
Frequenza massima
raggiunta
Frequenza minima raggiunta
Impostazione 1 frequenza
FDT raggiunta
Impostazione 2 frequenza
FDT raggiunta
Rilevamento livello
frequenza FDT
Valore di onteggio reset
raggiunto
Contatore limite massimo
ragiunto
Esecuzione di un ciclo
completo
Rilevamento modalità
monitoraggio della velocità
Funzionamento senza
comando
Inversione del comando del
convertitore
11
12
13
14
15
16
17
18
19
20
21
22
Decelerazione
23
Accelerazione
24
Alta tensione raggiunta
25
Bassa tensione raggiunta
26
Corrente nominale del
convertitore raggiunta
Corrente nominale del
motore raggiunta
Frequenza limite minimo di
uscita raggiunta
Corrente limite massimo
raggiunta
Corrente limite minimo
raggiunta
27
28
29
30
31
Misurazione del tempo 1
del tempo limite ragginta
32
Misurazione del tempo 2
del tempo limite ragginta
33
66
valore
impostato
descrizione
contenuto di uscita
Impostare su 0, non reazione d’uscita, ma è
0
Nessuna funzione
1
Allarme di errore
2
Rilevamento sovracorrente
3
Rilevamento sovraccarico
4
Rilevamento sovratensione
5
Rilevamento sottotensione
Si verifica un errore di sottotensione.
6
Rilevamento sottocarico
Si verifica un errore si sottocarico.
7
Rilevamento
surriscaldamento
Si verifica un errore si surriscaldamento.
8
Funzionamento in comando Il convertitore si trova in comando di marcia
9
Segnale di anomalia
retroazione PID
Segnale di anomalia retroazione PID
10
inversione del motore
Il motore è in fase di inversione
Frequenza impostata
raggiunta
Frequenza limite massimo
raggiunta
Raggiungimento della frequenza impostata
11
12
13
14
15
16
17
18
Frequenza limite minimo
raggiunta
Impostazione 1 frequenza
FDT raggiunta
Impostazione 2 frequenza
FDT raggiunta
Rilevamento livello di
frequenza FDT
Situazione non confermata in fase di errore
oppure dopo un errore.
Si verifica un errore di sovracorrente.
Si verifica un errore di sovraccarico del
mantenimento del tempo termoelettrico.
Si verifica un errore di sovratensione.
Raggiungimento del limite massimo della
frequenza
Raggiungimento limite minimo della
frequenza
Raggiungimento dell’impostazione 1 della
frequenza FDT
Raggiungingimento dell’impostazione 2 della
frequenza FDT
Soddisfa la condizione di rilevamento del
limite di frequenza FDT, o29~o31
I valori di conteggio precedenti raggiungono
l’azzeramento dei valori di conteggio
I valori di conteggio precedenti raggiungono il
Limite massimo di conteggio
limite minimo del valore di conteggio.
Valore reset conteggio
19
Completamento ciclo
completo
20
Rilevamento modalità
monitoraggio della velocità
21
Marcia senza comando
Completamento di un ciclo completo
In situazione di attesa del monitoraggio della
velocità, mantenere il tempo di attesa valido
con A11
Stato di marcia senza comando
23
Inversione del comando del Il convertitore si trova in comando di
inversione
convertitore
Il convertitore è in stato di decelerazione
Decelerazione
24
Accelerazione
22
Il convertitore si trova in stato di
l
i
67
25
Alta tensione raggiunta
Alta tensione
26
Bassa tensione raggiunta
Bassa tensione
27
Corrente nominake del
convertiore raggiunta
Raggiungimento della corrente nominale del
convertitore
28
Corrente nominale del
motore raggiunta
Raggiungimento della corrente nominale del
motore
Limite minimo della
frequenza d’uscita raggiunto
Limite massimo della
corrente raggiunto
Limite minimo della corrente
raggiunto
La frequenza impostata precedente è minore
del limite inferiore della frequenza
Raggiungimento del limite massimo della
corrente
Raggiungimento del limite inferiore della
corrente
Misurazione del tempo 1
del tempo limite ragginta
Misurazione del tempo 2
del tempo limite ragginta
Per dettagli sulla modalità di misurazione
del tempo di azione vedere impostazione
Per dettagli sulla modalità di misurazione
del tempo di azione vedere impostazione
29
30
31
32
33
o25
Ritardo del segnale d’uscita 1
Ritardo del segnale d’uscita 2
Ritardo del segnale d’uscita 3
Ritardo del segnale d’uscita 4
0~32.000
S
0
0~32.000
S
0
0~32.000
S
0
0~32.000
S
0
Si
o25~o28 definisce il tempo di ritardo della reazione del segnale di uscita o21~o24, unità S.
Azione in corto del segnale di uscita senza ritardo.
Impostazione 1
o29
o30~frequenza massima
Hz
0.00
Si
frequenza FDT
Impostazione 2
o30
0~o29
Hz
0.00
Si
frequenza FDT
Limite di rilevamento
o31
0.00~5.00
Hz
0.00
Si
FDT
Quando l'opzione del segnale di uscita (Ø21~ Ø24 ) è impostata su 14 e la frequenza di
uscita del convertitore raggiunge o supera l'impostazione 1 della frequenza FDT, il
corrispondente morsetto di uscita del segnale reagisce; quando la frequenza di uscita del
convertitore è inferiore alla frequenza impostata con questo terminale FDT, il
corrispondente terminale di uscita del segnale non reagisce.
Quando l'opzione del segnale di uscita (Ø21~ Ø24 ) è impostata su 15 e la frequenza di
uscita del convertitore raggiunge o supera l'impostazione 3 della frequenza FDT, il
corrispondente terminale di uscita del segnale reagisce; quando la frequenza di uscita del
convertitore è inferiore alla frequenza impostata con questo terminale FDT, il
corrispondente terminale di uscita del segnale non reagisce.
Quando l'opzione del segnale di uscita (Ø21~ Ø24 ) è impostata su 16, si rileva prima di
tutto l'impostazione 1 della frequenza FDT, quando la frequenza di uscita del convertitore
raggiunge o supera l'impostazione 1 della frequenza FDT, il corrispondente terminale di
uscita del segnale reagisce; dopo la reazione del terminale, si rileva l'impostazione 2 della
frequenza FDT, quando la frequenza di uscita del convertitore è inferiore all'impostazione 2
della frequenza FDT, il corrispondente terminale di uscita del segnale non reagisce.
o31 gamma rilevamento della frequenza di rilevamento
Questo parametro viene utilizzato per definire la gamma di rilevamento. Quando il
68
valore differenziale tra la frequenza reale e la frequenza di rilevamento supera la gamma di
rilevamento, il terminale di uscita reagisce.
Ad esempio: con impostazione 1 di frequenza FDT su 35Hz, impostazione 2 della
frequenza FDT su 30Hz, gamma di rilevamento della frequenza su 0, il terminale di uscita
del segnale reagisce.
Frequenza di uscita
FDT1=35Hz
FDT2=30Hz
tempo
Impostazione 1 della
requenza FDT raggiunta
OFF
ON
OFF
ON
tempo
Impostazione 2 della
requenza FDT raggiunta
OFF
rilevamento livello di
frequenza FDT
OFF
ON
OFF
ON
tempo
ON OFF
ON
tempo
ON significa reazione del terminale, OFF
significa non reazione del terminale
o32
o33
o34
raggiungimento limite
massimo della corrente
raggiungimento limite
minimo della corrente
Gamma di rilevamento della
corrente
o33~200%
%
120
si
o34~ o32
%
20
si
0~ o33
%
3
si
percentuale di corrente
o32=120
o33=20
o34=3
120
20
tempo
limite superiore della
corrente
limite inferiore della
corrente
o34
OFF
o34
o34
ON
OFF
ON
ON
OFF
tempo
o34
o34
OFF
o34
OFF
ON significa reazione del terminale, OFF
significa non reazione del terminale
tempo
Quando l'opzione del segnale di uscita (Ø21 ~ Ø24 ~) è impostata su 30, se la frequenza
di uscita del convertitore raggiunge o supera o32 + o34, il corrispondente terminale del
segnale di uscita reagisce; quando la frequenza di uscita del convertitore è inferiore a o32 o34, il corrispondente terminale del segnale di uscita non reagisce.
Quando l'opzione del segnale di uscita (Ø21 ~ Ø24 ~) è impostata su 31, se la frequenza
di uscita del convertitore raggiunge o supera o33 - o34, il corrispondente terminale del
segnale di uscita reagisce; quando la frequenza di uscita del convertitore è inferiore a o33 +
o34, il corrispondente terminale del segnale di uscita non reagisce.
o34 è utilizzato per definire la gamma di rilevamento, quando il valore differenziale tra la
69
corrente reale della corrente rilevata supera la gamma di rilevamento, il terminale di uscita
reagisce.
controllo 1 funzionamento
due linee
controllo 2 funzionamento
due linee
controllo 1 funzionamento
tre linee
controllo 2 funzionamento
tre linee
comando di marcia non
valido con alimentazione
comando di marcia valido
con alimentazione
1 bit
o35
modalità di controllo
morsetto
10
bit
0
1
2
0x001
3
3
No
0
1
Questo parametro imposta la modalità di funzionamento del morsetto.
1 Bit imposta la modalità di funzionamento del morsetto:
La polarità di livello elettrico è o47 impostazione predefinita polarità. Basso livello
elettrico o di discesa validi, il morsetto è in modalità attivazione autodrenaggio.
X può essere usata per esprimere il livello elettrico alto o basso, in aumento o di discesa.
modalità di
comando marcia
comando marcia
con tastierino
livello preferenziale
di marcia
livello preferenziale
del senso
edge-trigger
valido
uguale
uguale
level-trigger
non valido
preferenza marcia
preferenza FWD
0: controllo 1 funzionamento due linee
FWD/ STOP
FWD
REV/ STOP
REV
COM
F05=10 F05=4
comando
F05=3
FWD
REV
FWD
REV
fronte discendente
X
basso livello
X
avanzamento FWD
inversione REV
elettricità
X
fronte
alto livello
basso livello
discendente
elettricità
elettricità
fronte
alto livello
alto livello
ascendente
elettricità
elettricità
fronte ascendente
arresto STOP
1: controllo 2 funzionamento due linee
RUN/ STOP
FWD
FWD/ REV
REV
COM
F05=1o F05=4
FWD
comando
F05=3
REV
FWD
70
REV
fronte discendente
fronte
livello elettricità
livello elettricità
basso
basso
FWD
livello elettricità
livello elettricità
inversione REV
ascendente
basso
alto
X
livello elettricità
X
fronte discendente
fronte
fronte ascendente
avanzamento
arresto STOP
alto
2: controllo 1 funzionamento tre linee
FWD
FWD
REV
REV
STOP
STOP
COM
comando
F05=1 ;F05=3; F05=4
FWD
REV
STOP
fronte
livello elettricità
livello elettricità basso
avanzamento FWD
discendente
basso
inversione REV
fronte ascendente
ivello elettricità alto
livello elettricità basso
X
X
ivello elettricità alto
arresto STOP
3: controllo 2 funzionamento tre linee
FWD
FWD
REV
STOP
REV
STOP
COM
F05=1 ;F05=3; F05=4
comando
FWD
REV
STOP
fronte
discendente
X
livello elettricità
basso
avanzamento FWD
X
fronte
discendente
livello elettricità
basso
inversione REV
X
X
ivello elettricità alto
arresto STOP
10 bit imposta lo stato del morsetto in alimentazione
Quando lo stato del morsetto in attivazione è valido, l'unità per esegue immediatamente
la marcia, in alcuni casi non
è permesso che tale situazione accada.
Quando l'impostazione del comando di marcia del morsetto in alimentazione non è
valido, è necessario che dopo l'alimentazione elettrica, si imposti la non validità 3S
dell'impostazione del morsetto per poter di nuovo eseguire la marcia.
4 Comando 1 funzionamento a trigger singolo
71
FWD/ STOP
FWD
REV/ STOP
REV
COM
F05=1; F05=4;F05=3
FWD
comando
stato attuale
avanzamento FWD
arresto STOP
inversione REV
arresto STOP
arresto STOP
avanzamento
FWD
inversione REV
avanzamento
FWD
avanzamento FWD
inversione REV
REV
X
Manteniment
o
X
Manteniment
o
X
Manteniment
arresto STOP
o
5.Comando 2 funzionamento a trigger singolo
inversione REV
RUN/ STOP
FWD
FWD/ REV
REV
COM
F05=1;F05=4;F05=3
FWD
comando
stato attuale
livello
elettricità
basso
avanzamento FWD
arresto STOP
ivello
elettricità alto
inversione REV
arresto STOP
X
arresto STOP
avanzamento
FWD
X
arresto STOP
inversione REV
REV
72
o36
o37
o38
o39
o40
o41
o42
o43
o44
o45
o46
(DI1) opzione funzione terminale di uscita
(DI2) opzione funzione terminale di uscita
(DI3) opzione funzione terminale di uscita
(DI4) opzione funzione terminale di uscita
(DI5) opzione funzione terminale di uscita
(DI6) opzione funzione terminale di uscita
(DI7) opzione funzione terminale di uscita
(DI8) opzione funzione terminale di uscita
(AI1) opzione funzione terminale di uscita
(AI2) opzione funzione terminale di uscita
(AI3) opzione funzione terminale di uscita
nessuna funzione
0
comando avanzamento FWD
1
comando inversione REV
2
comando arresto STOP tre
linee
comando 1 velocità
multisegmento
comando 2 velocità
multisegmento
comando 3 velocità
multisegmento
comando 4 velocità
multisegmento
comando 1 accelerazione
multisegmento
comando 2 accelerazione
multisegmento
comando 3 accelerazione
multisegmento
comando 1 tensione digitale
multisegmento
comando 2 tensione digitale
multisegmento
comando 3 tensione digitale
multisegmento
modalità 1 principale
impostazione della frequenza
modalità 2 principale
impostazione della frequenza
modalità 3 principale
impostazione della frequenza
modalità 1 secondaria
impostazione della frequenza
modalità 2 secondaria
impostazione della frequenza
modalità 3 secondaria
impostazione della frequenza
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
funzionamento 1 tempo MSS
20
funzionamento 2 tempo MSS
21
funzionamento 3 tempo MSS
22
commutazione 1 modalità
controllo marcia
commutazione 2 modalità
controllo marcia
commutazione 3 modalità
controllo marcia
73
23
24
25
-
0
0
0
0
0
0
0
0
0
0
0
Si
Si
Si
Si
Si
Si
Si
Si
Si
Si
Si
commutazione 1 limite
superiore coppia in
avanzamento
commutazione 2 limite
superiore coppia in
avanzamento
commutazione 3 limite
superiore coppia in
avanzamento
commutazione 1 limite
superiore coppia in inversione
commutazione 2 limite
superiore coppia in inversione
commutazione 3 limite
superiore coppia in inversione
commutazione velocità di
coppia
26
27
28
29
30
31
32
comando reset errore
33
comando FWD JOG
34
Comando REV JOG
35
comando JOG ( impostazione
F35)
comando accelerazione e
decelerazione vietate
commutazione 1 e 2 del
motore
36
37
38
arresto libero
39
comando UP
40
comando DOWN
41
annullamento funzine di
marcia con programmazione
automatica
arresto marcia con
programmazione automatica
modalità iniziale
funzionamento programmato
modalità di arresto del
funzionamento programmato
annullamento conteggio
impulsi
conteggio impulsi di entrata
caricamento valore di
conteggio impostato
caricamento limite superiore
del valore di conteggio
ingresso del segnale errore
74
42
43
44
45
46
47
48
49
50
esterno
avvio dolce pompa 1
51
arresto pompa 1
52
avvio dolce pompa 2
53
arresto pompa 2
54
avvio dolce pompa 3
55
arresto pompa 3
56
avvio dolce pompa 4
57
arresto pompa 4
58
comando rotazione manuale
59
azzeramento periodo di
fornitura di acqua fissa
60
Senso di accelerazione e
decelerazione dell’estrusore
Senso di accelerazione e
decelerazione dell’estrusore
Limite del tempo di uscita 1
61
Limite del tempo di uscita 2
64
Fase in commutazione
programmata
65
62
63
]
valore
impostato
0
nessuna funzione
1
comando avanzamento FWD
2
comando inversione REV
3
marcia tre linee STOP
4
5
6
7
comando 1 multivelocità
comando 2 multivelocità
comando 3 multivelocità
comando 4 multivelocità
comando 1 accelerazione
multifase
comando 2 accelerazione
multifase
comando 3 accelerazione
multifase
tensione 1 digitale multifase
tensione 2 digitale multifase
tensione 3 digitale multifase
8
9
10
11
12
13
descrizione
contenuto di uscita
nessuna funzione
comando avanzamento FWD, è possibile
impostare edge-trigger o level-trigger
comando inversione REV, è possibile
impostare edge-trigger o level-trigger
quando 035 diventa marcia tre linee,
funzione STOP
Sintesi di impostazione della multivelocità in
16 fasi. Vedere gruppo di parametri H
Sintesi di impostazione dell'accelerazione in
8 fasi. Vedere gruppo di parametri H
Impostazione della tensione digitale in 8 fasi.
Vedere gruppo di parametri H
75
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
modalità 1 impostazione
principale della frequenza
modalità 2 impostazione
principale della frequenza
modalità 3 impostazione
principale della frequenza
modalità 1 secondaria
impostazione della frequenza
modalità 2 impostazione
secondaria della frequenza
modalità 3 impostazione
secondaria della frequenza
funzionamento 1 tempo MSS
funzionamento 2 tempo MSS
funzionamento 3 tempo MSS
commutazione 1 modalità
controllo marcia
commutazione 2 modalità
controllo marcia
commutazione 3 modalità
controllo marcia
commutazione 1 limite
massimo coppia in
avanzamento
commutazione 2 limite
massimo coppia in
avanzamento
commutazione 3 limite
massimo coppia in
avanzamento
commutazione 1 limite
massimo coppia in inversione
commutazione 2 limite
massimo coppia in inversione
commutazione 3 limite
massimo coppia in inversione
32
commutazione velocità di
coppia
33
comando allarme di errore
34
comando FWD JOG
35
comando REV JOG
36
comando JOG (impostazione
F35)
37
comando
accelerazione/decelerazione
Sintesi commutazione della modalità
secondaria impostazione della frequenza.
Vedere gruppo di parametri F
Sintesi commutazione della modalità
secondaria impostazione della frequenza.
Vedere gruppo di parametri F
Sintesi impostazione del tempo di
funzionamento in 8 fasi. Vedere gruppo
di parametri H
Sintesi commutazione della modalità
controllata di funzionamento. Vedere
gruppo di parametri F05
Sintesi commutazione limite massimo coppia
in avanzamento. Vedere gruppo di parametri
C15
Sintesi commutazione limite massimo coppia
in inversione. Vedere gruppo di parametri
C16
in modalità controllo del vettore,
commutazione tra la modalità di controllo
della velocità e la modalità di controllo
coppia
In edge-trigger, conferma o non conferma
dell'errore avvenuto.
Comando di funzionamento in avanzamento
elettrico
Comando di funzionamento in inversione
elettrica
Comando di funzionamento elettrico, il senso
è deciso in base alla senso di impostazione
F35.
Al fine di mantenere la situazione
precedente, è vietata l'accelerazione e la
76
vietata
decelerazione.
commutazione del motore 1 e 2
non valida: motore 1
valida: motore 2
arresto libero : Dopo l’arresto
38
commutazione del motore 1 e
2
39
arresto libero
libero,assenza comando di avvio. Dopo
1S è consentito il riavvio.
40
41
comando UP
comando DOWN
annullamento funzione di
marcia con programmazione
automatica
arresto marcia con
programmazione automatica
modalità iniziale
funzionamento programmato
modalità di arresto del
funzionamento programmato
annullamento conteggio
impulsi
comando di aumento, vedere A38~A42
comando di dimuzione, vedere A38~A42
42
43
44
45
46
47
conteggio impulsi di entrata
48
caricamento valore di
conteggio impostato
49
caricamento limite superiore
del valore di conteggio
50
ingresso del segnale errore
esterno
51
avvio dolce pompa 1
52
arresto pompa 1
53
54
avvio dolce pompa 2
arresto pompa 2
55
avvio dolce pompa 3
annullamento funzione di marcia
programmata
arresto marcia con programmazione
modalità iniziale funzionamento
programmato
modalità di arresto del funzionamento
programmato
in edge-trigger, annullamento o53 del
conteggio impulsi del convertitore
in edge-trigger, impostazione del conteggio
impulsi di entrata del terminale
in edge-trigger, il valore o54 di conteggio di
impostazione carica contatore a impulsi o53
in edge-trigger, il valore o55 di conteggio
limite superiore carica il contatore a impulsi
o53
Errore esterno di ingresso, level-trigger,
efficace dopo che il sistema ha riportato un
errore E_Set.
In edge-trigger, controllo avvio dolce arresto
della pompa 1.
Il controllo all'avvio dolce necessita del
controllo su due terminali, l'arresto è
prioritario.
E' necessario impostare il tipo di carico E01
come 9, la pompa E12 1 come dal controllo
dell'avvio dolce della pompa 1.
In edge-trigger, controllo avvio dolce arresto
della pompa 2.
Il controllo all'avvio dolce necessita del
controllo su due terminali, l'arresto è
prioritario.
E' necessario impostare il tipo di carico E01
come 9, la pompa E12 come dal controllo
dell'avvio dolce della pompa 2.
In edge-trigger, controllo avvio dolce arresto
della pompa 3.
77
come 9, la pompa E12 come dal controllo
dell'avvio dolce della pompa 3.
In edge-trigger, controllo avvio dolce arresto
della pompa 4.
Il controllo all'avvio dolce necessita del
controllo su due terminali, l'arresto è
prioritario.
E' necessario impostare il tipo di carico E01
come 9, la pompa E12 come dal controllo
dell'avvio dolce della pompa 4.
In edge-trigger, avvio automatico della
commutazione fornitura acqua con pompa a
pressione costante.
57
58
avvio dolce pompa 4
arresto pompa 4
59
comando rotazione manuale
60
azzeramento periodo di
fornitura idrica fissa
In edge-trigger, azzeramento periodo di
fornitura di acqua fissa utilizzando il tempo di
correzione di fornitura idriga.
61
Senso di accelerazione e
decelerazione
dell’estrusore.
Opzione della funzione morsetto di
ingresso DIx. Per dettagli vedere 036046.
62
Autorizzazione di
accelerazione e
decelerazione
dell’estrusore.
Opzione della funzione morsetto di
ingresso DIx. Per dettagli vedere 036046
63
Uscita 1 limite del tempo.
Limite temporale 1 della misurazione del
tempo di ingresso DIx. Per dettagli
vedere o65, 067
64
Uscita 2 limite del tempo.
Limite temporale 2 della misurazione del
tempo di ingresso DIx. Per dettagli
vedere o66, 068
65
Fase in commutazione
avvio programmato
Fase in commutazione a trigger singolo
in comando di avvio programmato
polarità terminali di uscita e di
0000~F7FF
0000
entrata
Polarità in cui è valido questo parametro utilizzato per selezionare ogni
terminale IO.
o47
15 14 13 12 11 10
9
8
7
6
5
4
3
2
1
2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
O4
O3
O2
O1
Inattivo
AI3
AI2
AI1
0
DI1
DI2
DI3
DI4
DI5
DI6
DI7
DI8
78
si
0~10 bit
polarità dei terminali di uscita
12~15 bit
polarità dei terminali di uscita
Basso livello elettricità attivo
(chiuso)
Basso livello elettricità attivo
0
0
(chiuso)
fronte discendente attivo, fronte
ascendente non attivo
Alto livello elettricità attivo
(disconnesso)
Alto livello elettricità attivo
1
1
(disconnesso)
fronte ascendente attivo, fronte
discendente non attivo
tempo 0 di risposta
o48
0.001〜30.000
s
0.005
del terminale di uscita
tempo 1 di risposta
o49
0.001〜30.000
s
0.005
del terminale di uscita
Tempo di risposta del terminale di uscita definito da o48,o49, l’uscita decide il tempo di
risposta del terminale corrispondente mediante o50.
o50
opzione tempo di risposta
del terminale di uscita
0~07FF
-
0
si
si
si
Tempo di risposta del terminale di uscita definito da o48,o49, l’uscita decide il
tempo di risposta del terminale corrispondente mediante o50.
Il tempo di ritardo della risposta del terminale di ingresso ha validità nei confronti sia
della chiusura che della disconnessione.
L'impostazione di questo parametro decide il tempo di risposta di ingresso di ogni
terminale.
10 9
8
7
6
5
4
3
2
1
2 2 2 2 2 2 2 2 2 2 2
10 9 8 7 6 5 4 3 2 1 0
0
DI1
DI2
DI3
DI4
DI5
DI6
DI7
DI8
AI1
AI2
AI3
impostazione 0~10 bit
o51
Configurazione
contatore
polarità terminale di uscita
0
tempo 0 di risposta del terminale di uscita con O48
1
tempo 1 di risposta del terminale di uscita con O49
1 bit
10 bit
Funzionamento calcolo ciclico
0
Funzionamento calcolo a ciclo unico
1
carico di peso dopo il raggiungimento
del limite superiore del valore di
conteggio
Azzeramento dopo il raggiungimento
del limite superiore del valore di
calcolo.
79
0
1
-
0
Si
100 bit
1000
bit
Ricarico pesante dopo alimentazione
0
Azzeramento dopo alimentazione
1
Mantenimento del conteggio originale
dopo alimentazione
2
Periodo di calcolo
0
Tempo valido del segnale in uscita
20ms
1
Tempo valido del segnale 100ms
2
Tempo valido del segnale 500ms
3
1 bit: modalità di conteggio controllato
0: in conteggio ciclico, dopo il raggiungimento del limite massimo del valore di
conteggio, l'uscita raggiunge l'impulso (impostazione terminale di uscita)
1: in conteggio a ciclo unico, dopo il raggiungimento del limite massimo del valore di
conteggio, l'uscita raggiunge l'impulso e si arresta la marcia.
10 bit: reazione in modalità ciclica dopo il raggiungimento del limite massimo del valore di
conteggio.
0: ricarico pesante
1: azzeramento
100 bit: situazione del contatore dopo alimentazione elettrica secondo definizione
0: ricarico pesante dopo alimentazione
1: azzeramento dopo alimentazione
2: mantenimento del conteggio originale dopo alimentazione.
1000 bit: l’impostazione di o21~o24 definisce il tempo di ritardo del raggingimento del
segnale di uscita di reset del conteggio oppure del limite massimo di conteggio.
0: tempo valido del segnale di uscita 10ms, quando questo valore è raggiunto, il
mantenimento fisso dell’uscita ha una validità di 10ms.
o52
Frequenza massima
di uscita degli impulsi
0.1~50.0
KHz
20.0
Si
Questo parametro definisce la frequenza di ingresso analogico maggiore della frequenza
di impostazione.
Alta frequenza dei segnali di ingresso può essere effettuata solo tramite il morsetto di
ingresso multi-funzione DI8 come morsetto di ingresso a impulsi.
La massima frequenza di impulsi di ingresso corrisponde a tutti i limiti massimi di
ingresso analogici.
Con frequenza di impostazione degli ingressi analogici a impulsi, la frequenza massima
di impulsi di ingresso 052 corrisponde alla frequenza di uscita massima F12.
La formula della frequenza di impostazione _set che corrisponde alla frequenza di
ingresso a impulsi _pulse: = f_set f_pulse/o52× F12.
Con impostazione di una data quantità della frequenza di ingresso analogico a impulsi,
la frequenza massima di impulsi di ingresso corrisponde al 100,0% corrispondente a o52.
La formula della modalità analogica p_set che corrisponde alla frequenza di ingresso a
impulsi f_pulse: p_set = f_pulse/o52 × 100.0%.
80
o53
stato contatore precedente
0~9999
o54
Impostazione conteggio di reset
o55
Impostazione limite massimo di conteggio
-
0
Si
0~ o55
0
Si
o54~9999
9999
Si
Quando il conteggio dei segnali a impulsi del morsetto di ingresso soddisfa le
condizioni predefinite, corrisponde all’istruzione Yi di uscita sul morsetto.
1, Dix (X = 1 ~ 8) del morsetto è impostato su "ingresso conteggio a impulsi" e
all’impostazione O54, O55.
Dix (X = 1 ~ 8) del morsetto è impostato su “azzerare contatore a impulsi”, dopo la
reazione del terminale, il contatore si azzera.
Dix (X = 1 ~ 8) del morsetto è impostato su “caricamento del conteggio reimpostato”,
dopo la reazione del terminla, il contatore ritorna al conteggio preimpostato.
Dix (X = 1 ~ 8) del morsetto è impostato su “caricamento limite massimo di conteggio”,
dopo la reazione del morsetto, il contatore carica il limite massimo del conteggio.
DiX Conteggio
0
1
2
3
4
5
6
3
o54
T
o21
4
5
6
3
o54
T
o22
T fissato dal O51 1000
o55
o55
T
T
Opzioni segnale in uscita Ø21~ Ø24:
raggiunto il conteggio impostato o2l, il tempo di validità del segnale di ingresso dopo il
raggiungimento del limite massimo del conteggio è impostato da o51.
raggiunto il conteggio impostato o22, il tempo di validità del segnale di ingresso dopo il
raggiungimento del limite massimo del conteggio è impostato da o51.
La gamma di frequenza dei segnali a impulsi del contatore è 0 ~ 100Hz.
o56
Opzione valida
terminale virtuale
0000~F7FF
-
0000
Si
Questo parametro è utilizzato per scegliere la validità delle funzioni morsetto virtuale di
ogni morsetto.
15 14 13 12 11 10
9
8
7
6
5
4
3
2
1
2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0
DI1
DI2
DI3
DI4
DI5
DI6
DI7
DI8
O4
O3
O2
O1
闲置
AI3
AI2
AI1
Impostazione 00~10bit
0
1
Opzioni di validità dei terminali visìrtuali
Validità terminali di ingresso reali
Validità terminali di ingresso virtuali
o57
Stato terminale DI1~4
0000~1111
o58
Stato terminale DI5~8
0000~1111
81
-
-
Si
Si
o59
Stato terminale AI1~3
000~111
Si
O60
Stato terminale O1~4
0000~1111
Si
L’impostazione del morsetto reale può essere efficace solo in stato di query del
morsetto.
La validità dell’impostazione morsetto virtuale può essere cambiata attraverso lo stato
aggiornamento di registro del terminale.
o61
o62
Uscita a impulsi SPA
Uscita a impulsi SPB
Non azione
0
Frequenza
impostata
1
Frequenza reale
2
Corrente reale
3
Tensione di uscita
4
Tensione bus
5
Temperatura
IGBT
6
Potenza di uscita
7
Velocità di uscita
8
Valore reale di
coppia
9
0
0
Si
Si
o63
Frequenza uscita impulsi
SPA
1~1000
-
1
Si
o63
o64
Frequenza uscita impulsi
SPB
1~1000
-
1
Si
o64
SPA e SPB forniscono due isolati segnali di uscita a impulsi e possono essere più
segnali di uscita analogica.
Dopo che SPA e SPB forniscono l’opzione della funzione di uscita a impulsi, ha effetto
la rialimentazione del convertitore.
Quando SPA corrisponde al segnale di uscita 1, dopo che questa funzione è stata
selezionata, l’azione di uscita DO1 di o21 non è valida.
Quando SPB corrisponde al segnale di uscita 2, dopo che questa funzione è stata
selezionata, l’azione di uscita DO2 di o21 non è valida.
Frequenza di uscita a impulsi = 1, il raggio del segnale di uscita 0 ~ 50Hz.
La frequenza massima di uscita a impulsi è 50kHz, la frequenza minima è 1Hz.
Per esempio:
82
Opzione frequenza a impulsi SPA= 2 frequenza reale
Proporzione uscita a impulsi SPA = 10
Frequenza a impulsi di uscita reale = frequenza reale / massima frequenza 50hz * 10 *
Opzione uscita a impulsi SPB = 3 corrente reale
Proporzione uscita a impulsi SPB = 20
Frequenzareale di uscita a impulsi = percentuale corrente reale/ 200 * 50hz * 20
Contenuto uscita
Valore di
impostazione
Definizione della gamma dei segnali di
uscita
Nessuna azione
0
Nessuna uscita
Frequenza impostata
1
0~frequenza massima
Frequenza reale
2
0~frequenza massima
Corrente reale
3
0~200%, parametro relativo:
percentuale corrente di uscita S03
Tensione di uscita
4
0~200%,parametro relativo: tensione
di corrente del motore b02,b15
Tensione bus
5
0~1000VDC, tensione continua
Temperatura IGBT
6
0~100.0℃
Potenza di uscita
7
0~200%
Velocità di uscita
8
0~velocità di rotazione massima
Valore reale di coppia
9
0~200% coppia
Misurazione del
tempo all’avvio
0
Misurazione del
tempo di
funzionamento
1
10 bit
Mantenimento
-
100
bit
Mantenimento
-
1000
bit
Mantenimento
-
1 bit
o65
o66
Impostazione 1
limite temporale
Impostazione 2
limite temporale
-
000
0
000
0
Si
Si
1 bit: modalità misurazione del tempo
0: misurazione del tempo all’avvio, si effettua la misurazione del tempo sia in
funzionamento che all’arresto.
1: misurazione del tempo di funzionamento: si effettua solo la misurazione del tempo
di funzionamento
10 bit: mantenimento
83
100 bit: mantenmento
1000 bit: mantenimento
o67
Limite
temporale 1
0.0~3200.0
s
2.0
Si
o68
Limite
temporale 2
0.0~3200.0
s
2.0
Si
Impostazione del limite temporale 1, tempo di misurazione 2 del limite temporale.
Il limite di tempo reale stabilito in base al tempo di questa impostazione deve essere
moltiplicato per il multiplo del tempo di funzionamento, il multiplo del tempo è impostato
su un’unità di tempo fissato da 10 bit di F49, vedere istruzioni F49.
84
5-6 Gruppo di PLC multivelocità
Gruppo precedente
Gruppo successivo
Codice
Descrizione
display LCD
tastierino
Campo impostazione
Display LED 7 frammenti
Annullamento funzione
di marcia programmata
Possibile funzione di
marcia programmata
1 bit
Direzione definita da
H40~H46
Direzione definita da
morsetto e tastierino
Accelerazione e
decelerazione definite da
H26~H39
Tempi di accelerazione e
decelerazione decisi dal
morsetto
Tempo di esecuzione
definito da H18~H25
Tempo di esecuzione
definito dal morsetto
10
bit
H00
Impostazioni
multivelocità
100
bit
1000
bit
Un
ità
Impostazi
oni di
fabbrica
Modif
ica
limiti
-
0000
Sì
0
1
0
1
0
1
0
1
1 bit: Il programma esegue le funzioni in modalità intelligente
L’uso del programma per eseguire la funzionalità PLC richiede l’impostazione dei bit su 1.
Per l’esecuzione della velocità di più segmenti è semplicemente necessario impostare il
cambiamento di velocità al corrispondente multi-stage o36~o46, senza necessarimante
impostare il parametro.
0:Esecuzione modalità Cancel del programma PLC
1:Esecuzione modalità intelligent del programma PLC
10 bit: Definisce l’esecuzione del programma e le impostazioni di direzione della velocità dei
multi-segmenti.
0: La direzione viene definita da H40~H46
1: La direzione viene decisa dalla tastierino o dal morsetto
100 bit: Definisce l’esecuzione del programma e le impostazioni relative al tempo di
accelerazione e decelerazione della velocità dei multisegmenti.
0: Tempo di decelerazione definito da H26~H39
1: Tempo di decelerazione e accelerazione definito dal morsetto
1000 bit: Definisce le impostazioni relative al tempo di esecuzione durante l’esecuzione di un
programma
0: Tempo di esecuzione definito da H18~H25
1: tempo di esecuzione definito dal morsetto
H01
Configurazione
esecuzione
programma
1 bit
10
bit
Comando ordine
0
Comando morsetto
1
Il programma esegue il
segmento di avvio
85
0~15
-
0710
Sì
100
bit
1000
bit
Il programma esegue il
segmento di chiusura
Tempo valido segnale di
uscita 8ms
Tempo valido segnale di
uscita 20ms
Tempo valido segnale di
uscita 100ms
Tempo valido segnale di
uscita 500ms
0~15
0
1
2
3
1 bit: modalità comando marcia programmata
0: comando ordine
Fase automatica di avvio in base alla marcia programmata. Terminata questa fase, marcia in
base al tempo di marcia programmata.
1: Comando morsetto
Utilizzo del morsetto di comando multivelocità o36~o46 per controllare la marcia
programmata dei comandi 1,2,3,4. Dopo il raggiungimento del tempo di marcia, la marcia
ha velocità in fase 0. Dopo la commutazione del morsetto del comando a più velocità,
ricominica la misurazione del tempo di marcia.
Se non si utilizza il morsetto di comando multi velocità o36~o46, è possibile utilizzare la
funzione di commutazione del funzionamento programmato o36~o46 ad una fase. Con
morsetto di controllo con trigger singolo, ad ogni trigger, si effettua marcia con
commutazione della marcia programmata ad una fase e ricomincia la misurazione del
tempo di marcia. Dopo il raggiungimento del tempo di marcia, la marcia ha velocità in fase
0.
10 bit: Definisce il segmento di avvio di esecuzione del programma.
100 bit: Definisce il segmento di chiusura di esecuzione del programma.
1000 bit: Definisce il tempo valido per il segnale di uscita relativo all’esecuzione del
programma.
1 bit
H02
Modalità di
esecuzione del
programma
10 bit
100
bit
1000
bit
Ciclo singolo
0
Ciclo continuo
1
Esecuzione comando ciclo
singolo
In pausa esecuzione a
velocità 0
In pausa-by esecuzione a
velocità fissa
Si arresta quando i parametri
sono impostati su Arresta
Si arresta con l’impostazione
su Avvia
Esecuzione alla velocità del
segmento di avvio
Esecuzione alla velocità
precedente l’arresto.
1 bit: Esecuzione del programma in modalità ciclo
86
2
0
1
0
1
0
1
-
0000
Sì
0: ciclo singolo
1: ciclo continuo
2: ciclo singolo, sulla base dell’esecuzione continua dei 7 segmenti, quando riceve il
comando STOP si arresta.
Il programma viene eseguito in tre modalità, come segue:
Esempio 1: Il programma viene eseguito in modalità ciclo singolo
Frequenza in uscita
60Hz
50Hz
40Hz
30Hz
20Hz
10Hz
0
10Hz
5X
6X
7X
3X
2X
1X
4X
T1
T2
T3
T4
Tempo
T7
T6
T5
Esempio 2: Esecuzione del programma in modalità ciclo continuo
Frequenza in uscita
60Hz
50Hz
40Hz
30Hz
20Hz
10Hz
0
10Hz
5X
5X
6X
6X
7X
7X
3X
3X
2X
2X
2X
1X
1X
1X
4X
4X
Esecuzione
programma
STOP
Tempo
Esempio 3: Esecuzione del programma in ciclo singolo, sulla base della modalità di esecuzione di
velocità dei 7 segmenti.
Frequenza in uscita
60Hz
50Hz
40Hz
30Hz
20Hz
10Hz
0
10Hz
5X
6X
7X
3X
2X
1X
4X
Tempo
Esecuzione
programma
STOP
Tempo
10 bit: Stato di esecuzione quando in pausa
0: Esecuzione velocità zero quando in pausa
1: Esecuzione velocità fissa quando in pausa
100 bit: Esecuzione segmento quando in arresto
0: Si arresta quando i parametri sono impostati su Arresta
1: Si arresta con le impostazione di avvio
1000 bit: Esecuzione segmento all’avvio
0: Esecuzione alla velocità del segmento all’avvio
87
1: Esecuzione alla velocità precedente l'arresto
Esempio: Cento=0 Si arresta quando i parametri sono impostati su Stop
Mille=0 Esecuzione alla velocità di avvio del segmento
Frequenza in uscita
3X
3X
2X
2X
1X
1X
F51=00
T1
X
T2
T1
T2
Tempo
at1'
dt3'
RUN
STOP
Esempio: Cento=0 Si arresta quando i parametri sono impostati su Stop
Mille=0 Esecuzione alla velocità che precede l’arresto
5X
Frequenza in uscita
4X
3X
3X
2X
F51=01
X+Y=T3
1X
T1
X
T2
Y
T4
Tempo
at3'
dt3'
RUN
STOP
1X
Esempio: Cento=1 Parametro di avvio è impostato su arresta
Mille=1 Arresta velocità anteriore
Frequenza in uscita
3X
3X
2X
F51=10,11
2X
1X
T1
1X
T2
X
T1
T2
Tempo
at1'
dt1'
RUN
STOP
Note:
at1': tutti i tempi di accelerazione usati mediante tempo di accelerazione at1'
dt1':tutti i tempi di decelerazione usati mediante tempo di decelerazione dt1'
at3':tutti i tempi di accelerazione usati mediante tempo di accelerazione'at3
dt3':tutti i tempi di decelerazione usati mediante tempo di decelerazione dt3'
1 Impostazione velocità segmento
Frequenza più bassa ~
H03
Hz
1X
Frequenza più alta
2 Impostazione velocità segmento
Frequenza più bassa ~
H04
Hz
2X
Frequenza più alta
3 Impostazione velocità segmento
Frequenza più bassa ~
H05
Hz
3X
Frequenza più alta
88
5.00
Sì
30.00
Sì
20.00
Sì
H06
H07
H08
H09
H10
H11
H12
H13
H14
H15
H16
H17
4 Impostazione velocità segmento
4X
5 Impostazione velocità segmento
5X
6 Impostazione velocità segmento
6X
7 Impostazione velocità segmento
7X
8 Impostazione velocità segmento
8X
9 Impostazione velocità segmento
9X
10 Impostazione velocità segmento
10X
11 Impostazione velocità segmento
11X
12 Impostazione velocità segmento
12X
13 Impostazione velocità segmento
133X
14 Impostazione velocità segmento
14X
15 Impostazione velocità segmento
15X
Frequenza più bassa ~
Frequenza più alta
Frequenza più bassa ~
Frequenza più alta
Frequenza più bassa ~
Frequenza più alta
Frequenza più bassa ~
Frequenza più alta
Frequenza più bassa ~
Frequenza più alta
Frequenza più bassa ~
Frequenza più alta
Frequenza più bassa ~
Frequenza più alta
Frequenza più bassa ~
Frequenza più alta
Frequenza più bassa ~
Frequenza più alta
Frequenza più bassa ~
Frequenza più alta
Frequenza più bassa ~
Frequenza più alta
Frequenza più bassa ~
Frequenza più alta
Hz
30.00
Sì
Hz
40.00
Sì
Hz
45.00
Sì
Hz
50.00
Sì
Hz
5.00
Sì
Hz
30.00
Sì
Hz
20.00
Sì
Hz
30.00
Sì
Hz
40.00
Sì
Hz
45.00
Sì
Hz
50.00
Sì
Hz
50.00
Sì
Impostare rispettivamente la frequenza di esecuzione del programma e la frequenza di esecuzione
della velocità del segmento-7; mediante il comando multimorsetto 1, 2, 3, 4 insieme con lo short-coding
COM si potrà realizzare la velocità accelerazione segmento-16.
La velocità OX è quella in modalità di esecuzione regolare, la fonte di impostazione può essere
regolata da F02, F03 e da altri parametri, il tempo di esecuzione è controllato da H18.
Il morsetto dei multisegmenti viene definito come segue (collegamento corto seguito da COM quando
impostato su ON, quindi, disconnesso quando impostato su OFF)
Velocità
0X
1X
2X
3X
4X
5X
6X
7X
Comando velocità
multimorsetto 1
OFF
ON
OFF
ON
OFF
ON
OFF
ON
Comando velocità
multimorsetto 2
OFF
OFF
ON
ON
OFF
OFF
ON
ON
Comando velocità
multimorsetto 3
OFF
OFF
OFF
OFF
ON
ON
ON
ON
Comando velocità
multimorsetto 4
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
Morsetto
8X
9X
10X
11X
12X
13X
14X
15X
Comando velocità
multimorsetto 1
OFF
ON
OFF
ON
OFF
ON
OFF
ON
Comando velocità
multimorsetto 2
OFF
OFF
ON
ON
OFF
OFF
ON
ON
89
Comando velocità
multimorsetto 3
OFF
OFF
OFF
OFF
ON
ON
ON
ON
Comando velocità
multimorsetto 4
ON
ON
ON
ON
ON
ON
ON
ON
Tempo di accelerazione e decelerazione e direzione dell’esecuzione
0X-7X
0
H00 10 bit
1
8X-15X
0X -7X direzione controllata da
parametro
8X-15X direzione definite
0X -7X direzione controllata da
da tastierino e morsetto
parametro e tastierino
0X -7X tempo di accelerazione e
0
decelerazione definito dal
8X-15X tempo di
parametro
accelerazione e
0X -7X tempo di accelerazione e
decelerazione controllato
decelerazione controllato dal
dal morsetto
H00 100 bit
1
morsetto
0
H00 1000 bit
1
0X -7X Tempo di esecuzione
controllato dal parametro
8X-15X tempo di
esecuzione definite dal
0X -7X tempo di esecuzione
morsetto
controllato dal morsetto
H18
0 Tempo di esecuzione segmento T0
0.0~3200.0
s
2.0
Sì
H19
1 Tempo di esecuzione segmento T1
0.0~3200.0
S
2.0
Sì
H20
2 Tempo di esecuzione segmento T2
0.0~3200.0
S
2.0
Sì
H21
3 Tempo di esecuzione segmento T3
0.0~3200.0
S
2.0
Sì
H22
4 Tempo di esecuzione segmento T4
0.0~3200.0
s
2.0
Sì
H23
5 Tempo di esecuzione segmento T5
0.0~3200.0
s
2.0
Sì
H24
6 Tempo di esecuzione segmento T6
0.0~3200.0
s
2.0
Sì
H25
7 Tempo di esecuzione segmento T7
0.0~3200.0
s
2.0
Sì
Il tempo di esecuzione reale equivale al tempo di esecuzione del set dei multisegmenti per il
tempo corrispondente alla velocità del tempo di esecuzione. Tale tempo di esecuzione reale viene
definito dai set di 10 bit H40
H26
1 segmento del tempo di accelerazione at1
0.0~3200.0
s
10.0
Sì
H27
1 segmento del tempo di decelerazione dt1
H28
2 segmento del tempo di accelerazione at2
0.0~3200.0
s
10.0
Sì
0.0~3200.0
S
10.0
H29
Sì
2 segmento del tempo di decelerazione dt2
0.0~3200.0
S
10.0
Sì
H30
3 segmento del tempo di accelerazione at3
0.0~3200.0
S
10.0
Sì
H31
3 segmento del tempo di decelerazione dt3
0.0~3200.0
S
10.0
Sì
H32
4 segmento del tempo di accelerazione at4
0.0~3200.0
S
10.0
Sì
90
H33
4 segmento del tempo di decelerazione dt4
0.0~3200.0
S
10.0
Sì
H34
5 segmento del tempo di accelerazione at5
0.0~3200.0
S
10.0
Sì
H35
5 segmento del tempo di decelerazione dt5
0.0~3200.0
S
10.0
Sì
H36
6 segmento del tempo di accelerazione at6
0.0~3200.0
S
10.0
Sì
H37
6 segmento del tempo di decelerazione dt6
0.0~3200.0
S
10.0
Sì
H38
7 segmento del tempo di accelerazione at7
0.0~3200.0
S
10.0
Sì
H39
7 segmento del tempo di decelerazione dt7
0.0~3200.0
s
10.0
Sì
Impostare rispettivamente il tempo di acc/dec a 7 segmenti di velocità. Ogni segmento
definirà il tempo necessario per raggiungere la velocità impostata: il tempo di accelerazione per
l’accelerazione e il tempo di decelerazione per la decelerazione. Il tempo reale di acc/dec viene
definito dai set del tempo di acc/dec per i multipli del tempo dei 100 e 1000 bit di H40~H46.
Consultare la sezione relativa a H40~H46.
Definizione del tempo di accelerazione e decelerazione dei multi segmenti come segue:
Frequenza in uscita
2X
1X
3X
T1
at1
T2
T3
dt2
at2
dt3
Tempo
Definizione accelerazione multisegmenti, tempo decelerazione
Nota: at1: segmento di accelerazione 1; at2: segmento di accelerazione 2; dt2:
segmento di decelerazione 2; dt3: segmento di decelerazione 3.
H40
H41
H42
H43
H44
H45
H46
1 Segmento velocità di
configurazione parola
2 Segmento velocità di
configurazione parola
3 Segmento velocità di
configurazione parola
4 Segmento velocità di
configurazione parola
5 Segmento velocità di
configurazione parola
6 Segmento velocità di
configurazione parola
7 Segmento velocità di
configurazione parola
1 bit
Direzione esecuzione: in
avanzamento
Direzione esecuzione:
inversione
Tempo di esecuzione: x secondi
10
bit
100
bit
1000
bit
0
1
0
Tempo di esecuzione: x minuti
1
Tempo di esecuzione: x ore
2
Tempo di esecuzione: x giorni
3
Tempo di accelerazione: x
secondi
0
Tempo di accelerazione: x minuti
1
Tempo di accelerazione: x ore
2
Tempo di accelerazione: x giorni
3
Tempo di decelerazione: x
secondi
Tempo di decelerazione: x
minuti
91
0
1
-
0000
0000
0000
0000
0000
0000
0000
Sì
Sì
Sì
Sì
Sì
Sì
Sì
Tempo di decelerazione: x ore
2
Tempo di decelerazione: x giorni
3
1 bit: durante l’esecuzione del programma a più velocità, la direzione di ogni segmento di velocità
viene definita dal parametro 1 bit.
Direzione di esecuzione
Vaori impostazione
In avanzamento
0
In inversione
1
In modalità di controllo dell’esecuzione impostata su F05=0/1/2, avverrà il controllo della direzione di
esecuzione di aogni segmento velocità.
Con modalità di controllo dell’esecuzione impostata su F05=3, saranno l’impostazione valori e il
morsetto FWD/REV a definire la direzione di ogni singola velocità. Il paramentro FWD ha la priorità.
FWD=1 direzione
dell’esecuzione
REV=1 direzione
dell’esecuzione
Impostazione valori
In inversione
In avanzamento
In inversione
0
In avanzamento
1
10 bit: Unità di tempo di esecuzione di più velocità nell’esecuzione del programma
Tempo di
10 bit
Intervallo ( ad esempio
0
3200.0 secondi
X minuti
1
3200.0 minuti
X ore
2
3200.0 ore
esecuzione
X secondi
H18~H25=3200.0)
X giorni
3200.0 giorni
3
100 bit, 1000 bit: unità di tempo di acc/dec dell’esecuzione di più velocità del programma
Tempo
100,
acc/dec
1000 bit
X secondi
Intervallo (ad esempio
H26~H39=3200.0)
0
3200.0 secondi
X minuti
1
3200.0 minuti
X ore
2
3200.0 ore
X giorni
3
3200.0 giorni
H47
Tensione digitale data di un segmento 0
-100.0~100.0
%
0.0
Sì
H48
Tensione digitale data di un segmento 1
-100.0~100.0
%
10.0
Sì
92
H49
Tensione digitale data di un segmento 2
-100.0~100.0
%
20.0
Sì
H50
Tensione digitale data di un segmento 3
-100.0~100.0
%
30.0
Sì
H51
Tensione digitale data di un segmento 4
-100.0~100.0
%
40.0
Sì
H52
Tensione digitale data di un segmento 5
-100.0~100.0
%
50.0
Sì
H53
Tensione digitale data di un segmento 6
-100.0~100.0
%
60.0
Sì
H54
Tensione digitale data di un segmento 7
-100.0~100.0
%
70.0
Sì
La funzione della tensione digitale data può essere analoga alla frequenza data, mediante la
selezione di F02, F03; può essere analoga a un PID dato o a un feedback, mediante la selezione di P02,
P03; può essere spostata mediante l’immissione del morsetto o36~o46.
1 bit
Segmento velocità attuale
0~0xF
Stato di più
10 bit
Segmento accelerazione attuale
0~0x7
H55
No
velocità
100 bit
Segmento tempo di esecuzione attuale
0~0x7
1000bit
Segmento tensione digitale attuale
0~0x7
1 bit: segmento velocità attuale
Segmento 0~16, in esadecimale, può essere spostato da o36~o46.
10 bit: segmento velocità attuale
Segmento 0~7, in esadecimale, può essere spostato da o36~o46.
100 bit: segmento tempo di esecuzione attuale
Segmento 0~7, in esadecimale, può essere spostato da o36~o46, valido durante
l’esecuzione del programma.
1000 bit: Segmento tensione digitale attuale
Segmento 0~7, in esadecimale, può essere spostato dal morsetto o36~o46.
5-7 Gruppo curve V/F
Gruppo precedente Gruppo successivo
Codice
U00
Descrizione
Display LCD
tastierino
V/F impostazione
frequenza 1
Campo impostazione
Display LED 7
frammenti
Unità
Impostazioni
di fabbrica
Modifica
limiti
0.00~U02
Hz
5.00
No
Primo valore frequenza della curva V/F impostata dall’utente, corrispondente a V1
Tensione di uscita
Massima di uscita
V8
V7
V6
V5
V4
V3
V2
V1
(0,0)
U01
Impostazione
tensione 1 di V/F
Frequenza in uscita
F1 F2
F3 F4
F5 F6 F7
0~U03
F8
%
Frequenza massima
10
No
Prima percentuale di tensione della curva V/F impostata dall’utente, mediante il riferimento
esaminato di tensione nominale al 100% del convertitore di potenza, corrispondente a F1.
U02
V/F impostazione
U00~U04
Hz
10.00
No
93
frequenza 2
L’utente imposta il secondo valore di frequenza della curva V/F, corrispondente a V2.
U03
Impostazione
tensione 2 di V/F
U01~U05
%
20
No
Secondo percentuale di tensione della curva V/F impostata dall’utente, mediante il riferimento
esaminato di tensione nominale al 100% del convertitore di potenza, corrispondente a F2.
V/F impostazione
U04
U02~U06
Hz
15.00
No
frequenza 3
L’utente imposta il Terzo valore di frequenza della curva V/F, corrispondente a V3.
U05
Impostazione
tensione 3 di V/F
U03~U07
%
30
No
Terzo percentuale di tensione della curva V/F impostata dall’utente, mediante il riferimento
esaminato di tensione nominale al 100% del convertitore di potenza, corrispondente a F3.
V/F impostazione
U06
U04~U08
Hz
20.00
No
frequenza 4
L’utente imposta il Quarto valore di frequenza della curva V/F, corrispondente a V4.
U07
Impostazione
tensione 4 di V/F
U05~U09
%
40
No
Quarto percentuale di tensione della curva V/F impostata dall’utente, mediante il riferimento
esaminato di tensione nominale al 100% del convertitore di potenza, corrispondente a F4.
V/F impostazione
U08
U06~U10
Hz
25.00
No
frequenza 5
L’utente imposta il Quinto valore di frequenza della curva V/F, corrispondente a V5.
U09
Impostazione
tensione 5 di V/F
U07~U11
%
50
No
Quinto percentuale di tensione della curva V/F impostata dall’utente, mediante il riferimento
esaminato di tensione nominale al 100% del convertitore di potenza, corrispondente a F5.
V/F impostazione
U10
U08~U12
Hz
30.00
No
frequenza 6
L’utente imposta il Sesto valore di frequenza della curva V/F, corrispondente a V6.
U11
Impostazione
tensione 6 di V/F
U09~U13
%
60
No
Sesto percentuale di tensione della curva V/F impostata dall’utente, mediante il riferimento
esaminato di tensione nominale al 100% del convertitore di potenza, corrispondente a F6.
V/F impostazione
U12
U10~U14
Hz
35.00
No
frequenza 7
L’utente imposta il Settimo valore di frequenza della curva V/F, corrispondente a V7.
U13
Impostazione
tensione 7 di V/F
U11~U15
%
70
No
Settimo percentuale di tensione della curva V/F impostata dall’utente, mediante il riferimento
esaminato di tensione nominale al 100% del convertitore di potenza, corrispondente a F7.
V/F impostazione
U12~Frequenza
U14
Hz
40.00
No
frequenza 8
massima
L’utente imposta il Ottava valore di frequenza della curva V/F, corrispondente a V8.
U15
Impostazione
tensione 8 di V/F
U13~100
94
%
80
No
Ottava percentuale di tensione della curva V/F impostata dall’utente, mediante il riferimento
esaminato di tensione nominale al 100% del convertitore di potenza, corrispondente a F8.
5 – 8 Gruppo funzionale PID
Gruppo precedente
Codice
Gruppo successivo
Descrizione/
Display LCD
tastierino
Campo impostazione
Display LED 7 frammenti
1 bit
10
bit
P00
Regolazione
unidirezionale
Regolazione
bidirezionale
Effetto
negativo
Effetto
positivo
Errore PID
nessun azione
Configurazione
PID
100
bit
1000
bit
Avviso
continuazione
esecuzione
Avviso
esecuzione
decelerazione
Avviso arresto
sistema
Unità
Impostazion
i di fabbrica
Modifica
limiti
-
0000
No
0
1
0
1
0
1
2
3
-
-
-
-
Quando il convertitore di potenza riceve il comando di avvio, il convertitore in base alla
modaltà di regolazione PID è in grado di controllare automaticamente la frequenza output nei
confronti dela segnale dato e del segnale feedback sulla morsettiera. Il processo avviene come
segue:
Segnale dato +
PID
convertitore
f
M
Segnale feedback
Δ=Segnale dato - segnale feedback Autoregolazione
PI8000/PI8100 PIDRegolare
0: effetto positivo, quando Δ>0, la frequenza aumenta; quando Δ<0, la frequenza diminuisce.
1: effetto positivo, quando Δ>0, la frequenza diminuisce; quando Δ<0 la frequenza aumenta.
trattamento anomalie PID:
1:Avviso continuazione esecuzione, continuazione dell’esecuzione segnale di anomalia.
2: Avviso decelerazione e arresto, decelerazione e arresto dopo segnale di anomalia.
3: Avviso e arresto del sistema: arresto del sistema dopo segnale di anomalia.
95
P01
Limite uscita
PID
0~100
%
100
Sì
I parametri definiscono l’intervallo limitato di uscita quando si utilizza il controllo PID
P02
Selezione
segnale
feedback
RS485
Impostazione
frequenza tramite
tastierino o linea
seriale RS485
0
AI1 analogia esterna
data
1
AI2 analogia esterna
data
2
AI3 analogia esterna
data
3
potenziometro su
tastierino impostato
4
Tensione digitale
multisegmento
impostata
5
Impulsi digitali
impostati
6
-
1
Sì
La selezione del segnale feedback PID può avvenire mediante il tastierino/linea seriale
RS485, il potenziomentro, la tensione digitale, la pulsione digitale che agiscono come segnali
feedback.
P03
Impostazione
segnale
dato
Frequenza impostata
da tastierino o LINEA
SERIALE linea
seriale RS485
0
AI1 analogia esterna
data
1
AI2 analogia esterna
data
AI3 analogia esterna
data
2
3
Potenziometro su
tastierino impostato
4
Tensione digitale
multisegmento data
5
Pulsione digitale
impostata
6
96
-
2
Sì
La selezione del segnale dato PID può avvenire mediante il tastierino/linea seriale RS485, il
potenziomentro, la tensione digitale, la pulsione digitale che agiscono come segnali dati.
P04
Valore segnale
dato dal
tastierino
0.0~100.0
%
50.0
Sì
Quando P03 è impostato su 4,i parametri relativi alla pressione data vengono stabiliti
mediante il tastierino. 0.0~100.0% corrisponde a 0 come massimo della pressione.
P05
Tempo
integrale PID
0.002~10.000
s
0.250
Sì
Deviazione
Tempo
Capacità movimentazione
Tempo
0.002~10.000s
Il tempo integrale determina la velocità di regolazione integrale agendo sulle deviazione tra il
valore feedback del PID e il valore dato dal regolatore PID.
Quando la deviazione tra il valore di feedback del PID e il valore dato è 100%, il regolatore
integrale continua a regolare l’uscita a (P01×F13×12.5%)Hz durante il tempo integrale PID.
(regolazione PID unidirezionale, ignorare proporzione ed effetto differenziale).
Se il valore è alto, il controllo è stabile ma la risposta è lenta; se il valore è basso, la risposta
del sistema è rapida ma si potrebbero verificare delle vibrazioni.
P06
PID tempo
differenziale
0.000~10.000
s
0.000
Sì
0.000~1.000s
Il tempo differenziale determina la regolazione dell’intensità, agendo sul rapporto di cambio
della deviazione tra il valore feedback del PID e il valore dato dal regolatore PID.
Quando il rapporto di cambio della deviazione tra il valore feedback del PID e il valore dato è
100%, il regolatore PID regola l’uscita a (P01×F13×12.5%)Hz. (Regolazione PID
unidirezionale, ignorare la proporzione e l’effetto integrale).
Più alto è il valore maggiore è l’intensità, ma il sistema sarà maggiormente soggetto a
vibrazioni.
P07
Guadagno
proporzionale
PID
0~1000.0
%
100.0
Sì
0~100.0%
Il guadagno proporzionale PID determina la regolazione dell’intensità relativa al regolatore
PID, maggiore è P maggiore sarà l’intensità.
Quando il guadagno proporzionale è pari a 100% e la differenza tra il feedback PID e il
valore dato è anche pari a 100%,l’uscita del regolatore PID è (P01×F13×12.5%)Hz.
(regolazione PID unidirezionale, ignorare effetto differenziale e integrale).
Il guadagno proporzionale è il parametro che decide l’estensione della risposta del regolatore
97
PID. Se il guadagno è alto, la risposta è rapida, se il guadagno è troppo alto possono verificarsi
delle vibrazioni; se il guadagno è piccolo, la risposta è lenta.
Deviazione
Tempo
Capacità movimentazione
Tempo
P08
Periodo di
campionamento
PID
0.002~10.000
s
0.010
Sì
Impostare il periodo di campionamento del segnale feedback.
Quando il parametro viene impostato su piccolo, la velocità di risposta del sistema e di
deviazione del feedback è lenta, ma il controllo è stabile.
Quando il parametro è impostato su basso, la velocità di risposta del sistema e di deviazione
del feedback è lenta, ed è facile che si verifichino delle vibrazioni.
P09
Limite
deviazione
0.0~20.0
%
5.0
Sì
Il limite deviazione influenza l’accuratezza e la stabilità del controllo sistema.
Quando il segnale di feedback e la deviazione del segnale dato sono minori del limite di
deviazione e il PID non procede a una regolazione, mantenere l’uscita stabile.
ando il segnale di feedback e la deviazione del segnale dato sono maggiori del limite di
deviazione e il PID procede a una regolazione in base alla deviazione, aggiornare l’uscita.
P10
Errore PID
tempo
misurazione
0.0~3200.0
s
0.0
P11
Errore PID
valore
misurazione
0.0~100.0
%
10.0
No
No
Quando il parametro PID è impostato su 0.0, non si sono verificati errori di misurazione.
Quando il segnale feedback del PID è minore di P11, si è verificato un errore
nell’individuazione di tutti i valori PID impostati, continuare dall’impostazione del tempo P10,
riconoscendolo come errore di regolazione del PID.
Campo display
0.00~100.00
1.00
Sì
PID
A09 PID valore impostato=PID valore impostato(%)×P12
A10 PID valore feedback=PID valore feedback(%)×P12
Se il feedback PID 10V corrisponde alla pressione 4.0Mpa e si desidera visualizzare il valore
attuale A09,A10, impostare P12 su 0.04.
P12
5-9 Gruppo estensione parametri
Gruppo precedente
Gruppo successivo
98
Codi
ce
Descrizione/ display
LCD tastierino
Campo impostazione
Display LED 7 frammenti
Generale
E00
Tipo di carico
Un
ità
Imposta
zioni di
fabbrica
Modif
ica
limiti
-
0
No
0
Pompa
1
Ventola
2
Macchina per iniezione
3
Macchina per tessile
4
Macchina sollevamento
5
Pump-jack
6
Cinghia convertitore
Alimentazione frequenza
variabile
7
8
Rifornimento idrico
9
Riservato
10
Riservato
11
Controllo coppia
12
Alimentazione regolatore
Alimentazione corrente
costante
13
Estrusore
14
15
1 E00 impostato su 8: alimentazione frequenza variabile
Selezione segnale impostato P03 PID, è possibile impostare in diverse modalità mediante
tastierino, analogico AI1, multi modalità pulsazione per impostare la tensione data.
Calcolo tensione impostata
Tensione impostata 220VAC
Valore impostazione tensione data=220×1.414/500*100%=62.2%
Parametri speciali di alimentazione frequenza variabile:
Numero
Valori di
Nome
Campo
Unità
Definizione
di serie
fabbricazione
Parametro
Tempo aumento
E16
0~9999
0
utente 1
tensione
0~9999
Parametro
Tempo diminuzione
E17
0
utente 2
tensione
In modalità alimentazione regolare, la frequenza in uscita e la tensione in uscita possono
essere regolate sepatamente.
Se la frequenza in uscita aumenta, il tempo diminuisce in accordo con la regolazione di
F09,F10
Il tempo di aumento della pressione E16, definisce il tempo di aumento della pressione in
uscita, 9999 corrisponde a 999,9 secondi.
Il tempo di diminuzione della pressione E17, definisce il tempo di diminuzione della
pressione in uscita, 9999 corrisponde a 999,9 secondi.
L’aumento della tensione e diminuzione del tempo avviene solamente quando in
esecuzione si regola l'uscita, che imposta l'accelerazione del tempo della tensione. Dopo aver
emesso il comando di arresto della macchina, il controller dopo che la decelerazione della
frequenza in uscita arriverà a 0hz, arresterà la frequenza.
0~9999
Parametro
Tensione massima in
E18
0
utente 3
uscita
È necessario definire la tensione massima in uscita del sistema, per ragioni di sicurezza e
99
per garantire all'interno dell'intervallo di carico la tensione in uscita.
Se la pressione massima di sistema è 250VAC.
La tensione in uscita massima sarà=250
E18=250
2. E00 impostato su 13: alimentazione regolare
In modalità A12, accesso hall 13, si procede alla misurazione della tensione in uscita, con
due accessi hall in funzione, si assicura che la tensione in uscita non superi i limiti di tensione
dell’accesso hall.
In modalità tensione regolare, è necessario regolare i parametri:
Gruppo funzioni PID, selezione segnale feedback P02 PID.
Tramite la misurazione analogica AI2, AI3 funzione come accesso hall, garantendo la
sicurezza della tensione in uscita.
Quando il feedback della tensione è 100%, la corrispettiva tensione misurata dell’accesso
hall è 500VAC, tensione in uscita accesso hall pari a 5V.
设定 o03=50%,o05=50%。
Impostare o03=50%,o05=50%。
Selezione segnale impostato P03 PID, è possibile impostare mediante tastierino, analogico
AI1, impostazione multi modalità pulsazione impostazione tensione data.
Calcolo tensione data:
Quando la tensione data è pari a 220 VAC, il valore di impostazione della tensione è
=220×1.414/500*100%=62.2%
Gli altri parametri PID saranno regolati in base alle circostanze.
Im modalità tensione regolare PID, il tempo di accelerazione della tensione viene controllato
dal parametro PID, senza influenzare il tempo di accelerazione della tensione
Parametri speciali alimentazione regolare
Valori di
Numero
Nome
Campo
Unità
Definizione
fabbricazione
Parametro
Tempo aumento
E16
0~9999
0
utente 1
tensione
0~9999
Parametro
Tempo diminuzione
E17
0
utente 2
tensione
In modalità alimentazione regolare, è possibile regolare la frequenza in uscita e la tensione
in uscita separaramente.
Aumento frequenza in uscita, diminuzione tempo in base alla regolazione dei paramentri
F09,F10.
Il tempo di aumento della pressione E16, definisce il tempo di aumento della pressione in
uscita, 9999 corrisponde a 999,9 secondi.
Il tempo di diminuzione della pressione E17, definisce il tempo di diminuzione della
pressione in uscita, 9999 corrisponde a 999,9 secondi.
L’aumento della tensione e diminuzione del tempo avviene solamente quando in
esecuzione si regola l'uscita, che imposta l'accelerazione del tempo della tensione. Dopo aver
emesso il comando di arresto della macchina, il controller dopo che la decelerazione della
frequenza in uscita arriverà a 0hz, arresterà la frequenza.
0~9999
Parametro
Tensione in uscita
E18
0
utente 3
massima
È necessario definire la tensione massima in uscita del sistema, per ragioni di sicurezza e
per garantire all'interno dell'intervallo di carico la tensione in uscita.
Se la pressione massima di sistema è 250VAC, la tensione in uscita massima sarà
=250×1.414/500*100%=70.7%
E18=707。
E01
Avvio deviazione
pressione
0.0~100.0
100
%
10.0
Sì
E02
Avvio estensione tempo
0.0~3200.0
s
5.0
Sì
Pressione feedback < pressione data – Avvio deviazione pressione
Continuare a superare E02 avvio estensione tempo, il convertitore di potenza si riavvierà in
modalità standby.
Questo parametro viene utilizzato per impedire che il convertitore si avvii e si arresti
frequentemente.
E03
Arresta frequenza
0~50.00
Hz
5.00
No
Arresta estensione
E04
0.0~3200.0
s
5.0
No
tempo
Se la frequenza impostata è minore o uguale a E04, arresta estensione tempo, il convertitore
passerà dallo stato di esecuzione ad arresta modalità standby.
Se il parametro impostato è maggiore, più facile sarà l’arresto del sistema, se il parametro
E03 è impostato su 0, le funzioni di arresto frequenza e avvio controllo pressione risulteranno non
valide.
La combinazione di E01,E02,E03,E04 viene utilizzata per controllare le azioni del sistema e i
sistemi di approvigionamento idrico all’interno del regolatore pressione per il risparmio
dell’acqua。
Per esempio:
Pressione data =50%
Avvio deviazione pressione 10%, avvio pressione = pressione data – avvio deviazione
pressione = 40%
Arresta frequenza 5Hz
pressione
Feedback pressione
Pressione data
50%
Pressione d'avvio
40%
0
E02
frequenza Impostazione
frequenza
Limite frequenza alto
Tempo
Frequenza d'arresto
Limite frequenza basso
0
E04
Tempo
Valore di arrivo
E05
0~100.0
%
90.0
Sì
pressione alta
Quando il feedback della pressione raggiunge e supera il valore di arrivo di pressione alta
relativa a questo parametro, il morsetto di uscita I/O seleziona 25 emettendo, quindi, il segnale di
arrivo.
Valore di arrivo
E06
0~100.0
%
10.0
Sì
pressione bassa
Quando il feedback della pressione sarà minore del valore di arrivo di pressione bassa, il
morsetto di uscita I/O seleziona 26 emettendo, quindi, il segnale di uscita.
Tempo
E07
Tempo di
Non valido
0 0000
Sì
approvigi
approvigionamento
1 bit
idrico
onament
Valido
1
o idrico
Pression
Imposta in
10 bit
0
e data
base a P03
101
100
bit
1000
bit
Imposta in
base a H47~
H54
Modalità
cerchio
Timing
mode
Modalità
singola
Segmento timing mode
attuale
1
0
1
1 bit: tempo approvigionamento idrico
0 tempo approvigionamento idrico funzione non valida
1 tempo approvigionamento idrico funzione valida
10 bit: pressione data
0 La presssione data durante l’approvigionamento idrico è impostata secondo il valore PID
dato selezionando P03.
1 La pressione data durante l’approvigionamento idrico è impostata secondo il
corrispondente valore corrente della tensione digitale H47~H54 dato.
100 bit: Timing mode
0 Modalità ciclo
Iniziare a prendere il tempo dal momento dell’esecuzione dell’avvio, quando raggiungerà il
tempo impostato, il convertitore si sposterà automaticamente sul set di tempo del periodo
successivo. Alla fine del giro, il convertitore ripartirà automaticamente dal primo paragrafo 0
rieseguendo il ciclo.
1 Ciclo singolo
Iniziare a prendere il tempo dal momento dell’esecuzione dell’avvio fino al momento di
approvvigionamento idrico, quando raggiungerà il tempo impostato, il convertitore si sposterà
automaticamente sul set di tempo del periodo successivo. Alla fine del giro, il convertitore si
arresterà automaticamente e aspetterà il prossimo comando di avvio.
1000 bit: Segmento regolazione tempo attuale
Quando il tempo di approvigionamento idrico è impostato su 0, si annullerà il tempo di
approvigionamento idrico per il periodo impostato.
Segmento
tempo attuale
E08
Pressione
data
0
Tempo
approvigionament
o idrico
H18
1
H19
H48
2
H20
H49
3
H21
H50
4
H22
H51
5
H23
H52
6
H24
H53
7
H25
H54
Definizione tempo di
rotazione intervalli regolari
H47
0.0~3200.0
Ore
0.0
No
La rotazione intervalli regolari è in grado di controllare modalità e tempo di rotazione delle
102
pompe.
Quando la rotazione intervalli regolari è impostata su 0.0 ore, avverrà l’annullamento della
funzione di rotazione.
Quando la rotazione intervalli regolari è impostata tra 0.1~3200.0, dopo un’operazione di
stabilizzazione, controllerà la rotazione delle pompe secondo il principio primo avvio primo
arresto.
Primo avvio primo arresto: nel caso si vogliano arrestare le pompe, è necessario innanzitutto
arrestare la prima pompa in funzione.
In base al principio primo avvio primo arresto per aggiungere o rimuovere le pompe, è
possibile assicurare la possibilità di funzionamento di tutte le pompe, evitando che alcune si
arrugginiscano a causa del mancato funzionamento per lungo tempo. Se l’utente desidera
mantenere ogni pompa in funzione a intervalli regolari, attiverà questa opzione.
Ordine rotazione pompa:(E12=0x0111)
Situazione all’avvio: frequenza della pompa 1,conversione pompa 2, arresto pompa 3.
Dopo commutazione singola:arresto pompa 1, frequenza pompa 2, conversione pompa 3.
Dopo commutazione doppia: conversione pompa 1, arresto pompa 2, frequenza pompa 3.
E09
Ritardo azione
interruzione
elettromagnetica
0.000~10.000
s
0.500
Sì
Impostare pompa 1 (unità motore) su ritardo interruzione elettromagnetica per passare da
frequenza variabile a frequenza di lavoro o da frequenza di lavoro a frequenza variabile.
Questo per evitare che la frequenza di uscita del converitore corrisponda alla fornitura di
alimentazione AC e si verifichi un corto cicruito dovuto all’eccessiva lentezza dell’azione di
interruzione elettromagnetica.
Tempo supervisione
E10
0~9999
s
5
Sì
shift pompe
Impostare il tempo da quando la frequenza di uscita del convertitore raggiunge la massima
frequenza fino all’aumento del numero di pompe in azione (unità motore), o da quando la
frequenza di uscita delle pompe raggiunge il minimo fino alla diminuzione del numero di pompe in
azione (unità motore). La lunghezza del tempo impostato viene decisa in base alla velocità di
cambiamento della pressione, all’interno del campo di probabile vibrazione, minore è il tempo
meglio è.
Il convertitore controllerà la pressione constante relativa all’approvigionamento idrico delle
pompe.
Accelerazione ordine pompa 1→pompa 2→pompa 3→pompa 4
Decelerazione ordine pompa 4→pompa 1→pompa 2→pompa 3
E11
Configurazione
pressione
costante
nell’approvigiona
mento idrico
1 bit
10 bit
Modalità
arresto
Stato delle
103
Diminuzione
velocità fino
ad arresto
del sistema
Frequenza
variabile fino
ad arresto
Arresto
libero
Mantieni
0
1
2
0
-
0000
No
pompe in
caso di
errore
100 bit
1000
bit
Modalità
cambiame
nto
rotazione
Mantenim
ento stato
pompe
stato attuale
Arresto di
tutte le
pompe
Frequenza
variabile fino
a frquenza
di lavoro
Frequenza
variabile fino
all’arresto
Manteniman
to stato
Ripristino
arresto
1
0
1
0
1
1 bit: modalità arresto sistema
0 diminuzione velocità fino ad arresto del sistema: in caso di errore nel convertitore, tutte le
pompe decelerano fino al completo arresto.
1.Frequenza variabile pompe fino ad arresto: in caso di errore del converitore, la frequenza
variabile delle pompe arresta l’esecuzione, la frequenza di lavoro mantiene l’esecuzione.
Per arrestare la frequenza di lavoro delle pompe, è necessario utilizzare il comando di
arresto libero del morsetto di entrata o36~o46 o che i pulsanti del tastierino multifunzione MF1,
MF2 siano impostati su 2: funzione arresto libero.
2 arresto libero: in caso di errore del convertitore, tutte le pompe si arresteranno
automaticamente.
Dopo l’arresto libero,riduzione della sequenza di avvio e arresto mantenuto da 1000
bit di E11,riordine con impostazione multipompa E12.
arresto rifornimento idrico 3: arresto solo della pompa che fornisce rifornimento
idrico.
L’avvio dolce della pompa necessita del comando di arresto dell’avvio dolce con
morsetto di uscita o36~o46 oppure impostando il tasto multifunzione del tastierino
MF1,MF2 su 2: funzione arresto libero.
10 bit: stato delle pompe in caso di errore
0 mantenimento stato attuale: in caso di errore del convertitore, si arresterà l’esecuzione
delle pompe, mentre la frequenza di lavoro delle pompe verrà mantenuta allo stato attuale。
In caso di anomalia,nel caso in cui si verifichi una delle seguenti anomalie, gestire
l'anomalia in base alle reazioni impostate.
12
E.PId
Anomalia regolatore PID
13
E.OHt
Anomalia surriscaldamento del
motore
14
E.OL2
Anomalia sovraccarico del
motore
104
15
E.PG
Erroe PG
16
E.PHo
Fase di uscita del convertitore
17
E.COA
Anomalia porta A di
comunicazione Rs485
18
E.COb
Anomalia porta B di
comunicazione Rs485
Questa funzione è adatta solo in caso di malfunzionamenti che permettono
malfunzionamenti della marcia. In caso di malfunzionamenti che non permettono
malfunzionamenti di marcia, il motore si arresta completamente.
1 arresto di tutte le pompe: in caso di errore del convertire, tutte le pompe si arresteranno
automaticamente.
100 bit: modalità cambiamento Avvio dolce
0 da frequenza variabile a frequenza di lavoro: dopo che la velocità delle pompe di controllo
della frequenza variabile raggiunge la frequenza di lavoro, si procede verso un cambiamento
della rotazione o al controllo dell’avvio dolce.
1 frequenza variabile fino ad arresto: dopo che l’arresto delle pompe controlla la frequenza
variabile, si procede verso verso un cambiamento della rotazione o al controllo dell’avvio dolce.
1000 bit: mantenimento stato delle pompe
0 mantenimento stato: dopo l’arresto dell’approvigionamento idrico a pressione costante di
più pompe, mantenere la procedura attuale di primo avvio primo primo arresto di più pompe.
1 Ripristino arresto: dopo l’arresto dell’approvigionamento idrico a pressione costante di più
pompe, premere E12 per ripristinare la configurazione della procedura di primo avvio primo
arresto di più pompe
E12
Configurazion
Pompa 1 non valida
0
1111
No
e di più
Frequenza variabile
pompe
pompa 1 per il controllo
1
1 bit
della pompa
Avvio dolce pompa 1 per il
2
controllo della pompa
Pompa 2 non valida
0
Frequenza variabile
pompa 2 per il controllo
1
10 bit
della pompa
Avvio dolce pompa 2 per il
2
controllo della pompa
Pompa 3 non valida
0
Frequenza variabile per il
1
100 bit
controllo della pompa 3
Avvio dolce pompa 3 per il
2
controllo della pompa
Pompa 4 non valida
0
1000 bit
Frequenza variabile
105
1
pompa 4 per il controllo
della pompa
Avvio dolce pompa 4 per il
controllo della pompa
2
In modalità controllo più pompe, impostare la modalità controllo per ogni pompa
1 bit
10 bit
E13
Stato di più
pompe
100 bit
1000 bit
Arresto pompa 1
Esecuzione pompa 1 in
frequenza variabile
Esecuzione pompa 1 in
frequenza di lavoro
Arresto pompa 2
Esecuzione pompa 2 in
frequenza variabile
Esecuzione pompa 2 in
frequenza di lavoro
Arresto pompa 3
Esecuzione pompa 3 in
frequenza variabile
Esecuzione pompa 3 in
frequenza di lavoro
Arresto pompa 4
Esecuzione pompa 4 in
frequenza variabile
Esecuzione pompa 4 in
frequenza di lavoro
0
1
2
0
1
2
-
0000
No
-
0000
Sì
0
1
2
0
1
2
In modalità controllo di più pompe, visualizza lo stato di ogni pompa.
Arresto pompa 1
0
1 bit
Avvio dolce pompa 1
1
Arresto pompa 2
0
10 bit
Controllo
Avvio dolce pompa 2
1
E14
pompe in
Arresto pompa 3
0
avvio dolce
100 bit
Avvio dolce pompa 3
1
Arresto pompa 4
0
1000 bit
Avvio dolce pompa 4
1
In modalità controllo di più pompe, impostare la modalità controllo di ogni pompa
Sì
E15
Parametro utente 0
0~9999
-
0
E16
Parametro utente 1
-
0
0
Sì
Sì
E17
Parametro utente 2
0~9999
0~9999
E18
Parametro utente 3
0~9999
0
Sì
Parametro utente 4
0~9999
0
Sì
E20
Parametro utente 5
0~9999
0
Sì
E21
Parametro utente 6
0~9999
0
Sì
Parametro utente 7
0~9999
0
Sì
E19
E22
0~9999
E23
Parametro utente 8
0
Consultare l’appendice 4 per istruzioni dettagliate relative all’estensione dei parametri.
106
Sì
5-10 Velocità gruppo parametri loop
Gruppo precedente Gruppo successivo
Cod
ice
Descrizione display
LCD tastierino
C00
Filtro tempo velocità
loop
Campo impostazioni
Display LED 7 frammenti
Unit
à
Impost
azioni
di
fabbri
ca
2~200
ms
10
Modi
fica
limiti
Sì
Definisce il filtro del tempo della velocità loop. L’intervallo è 2~200ms. In caso di valore
troppo grande, il controllo è stabile, ma la risposta è lenta; se il valore è troppo piccolo, la
risposta del sistema è rapida, ma potrebbe essere instabile. È, quindi, necessario tenere in
considerazione la stabilità e la velocità di risposta al momento dell’impostazione del valore。
C01
Speed-loop low
speed Ti
0.01~100.00
s
0.15
Sì
Definisce il tempo integrale della velocità bassa del loop di velocità. L’intervallo è 0.01~
100.00. Se il tempo integrale è troppo ampio, la risposta è lenta e il controllo del segnale disturbi
esterni peggiora, se il tempo integrale è limitato, la risposta è rapida ma si potrebbero verificare
delle vibrazioni.
C02
Loop velocità velocità
bassa Td
0.000~1.000
s
0.000
Sì
Definisce il tempo differenziale della velocità bassa del loop di velocità. L’intervallo è
0.000~1.000s. Se il tempo differenziale è abbastanza ampio, potrebbero verificarsi vibrazioni
dovute alla differenza dell’azione P, che si attenuano velocemente; se è troppo ampio, si
potrebbero verificare vibrazioni; mentre se il tempo differenziale è troppo breve, la funzione
deviazione potrebbe essere troppo limitata.
C03
Loop velocità velocità
bassa P
0~200
%
150
Sì
Definisce il guadagno proporzionale del segmento a bassa velocità del loop. L'intervallo è
0~1000%. Se il guadagno è grande, la risposta è rapida, ma se è troppo grande, si potrebbero
verificare delle vibrazioni; se al contrario è troppo piccolo, la risposta sarà lenta,
C04
Bassa frequenza di
commutazione loop di
velocità velocità
bassa
0.0~C08
Hz
7.00
Sì
Definisce la bassa frequenza di commutazione del loop velocità a velocità bassa. Il
parametro e la frequenza di commutazione ad alta velocità ottimizzano la velocità del loop,
relativa al parametro PID.
C05
Loop velocità alta
velocità Ti
0.01~100.00
s
0.50
Sì
Definisce il tempo intergrale di alta velocità Ti del loop velocità. L’intervallo è 0.01~100.00s.
Se il tempo integrale è troppo ampio e lento, la variazione di controllo disturbi esterni si
indeboliosce; se il tempo integrale è troppo breve e veloce, si potrebbero verificare delle
vibrazioni.
C06
Loop velocità alta
velocità Td
0.000~1.000
107
s
0.000
Sì
Definisce il tempo intergrale di alta velocità Td del loop velocità. L’intervallo è 0.000~
1.000s. Se il tempo differenziale è abbastanza ampio, potrebbero verificarsi vibrazioni dovute
alla differenza dell’azione P, che si attenuano velocemente; se è troppo ampio, si potrebbero
verificare vibrazioni; mentre se il tempo differenziale è troppo breve, la funzione di deviazione
potrebbe essere troppo limitata.
Loop velocità alta
velocità Td
C07
0~100
%
150
Sì
Definisce il guadagno proporzionale del segmento alta velocità del loop velocità. L’intervallo
è 0~1000%. Se il guadagno è grande, la risposta è rapida, ma in caso sia troppo grande,
potrebbero verificarsi delle vibrazioni; se il guadagno è piccolo, la risposta sarà lenta.
Frequenza di
commutazione ad
C08
alta velocità del loop
C04~Frequenza massima
Hz
30.00
Sì
velocità
Definisce il tempo integrale della frequenza di commutazione ad alta velocità del loop
velocità. Il parametro e la frequenza di commutazione a bassa velocità ottimizzano la velocità
loop relativa al parametro PID:
Compensazione
C09
0~200
%
100
Sì
scorrimento a bassa
velocità
Compensazione scorrimento a bassa velocità.
C10
Commutazione
frequenza dello
scorrimento a bassa
velocità
0~C12
Hz
5.00
Sì
%
100
Sì
Hz
30.00
Sì
%
200.0
Sì
%
200.0
Sì
Compensazione scorrimento della commutazione frequenza a bassa velocità.
C11
Compensazione
scorrimento ad alta
velocità
0~200
Compensazione scorrimento dello slip ad alta velocità.
C12
Commutazione
frequenza dello
scorrimento ad alta
velocità
C10~Frequenza massima
Compensazione scorrimento della commutazione frequenza ad alta velocità.
C13
Limite coppia in
avanzamento
0.0~300.0
Il parametro è un rapporto che l’utente può impostare al massimo.
C14
Limite coppia in
inversione
0.0~300.0
Il parametro è un rapporto, l'utente può impostare la coppia massima in inversione
C15
Modalità
impostazione coppia
in avanzamento
Impostato da tastierino o linea
seriale RS485
AI1 analogia esterna data
108
-
0
Sì
AI2 analogia esterna data
AI3 analogia esterna data
Potenziometro su tastierino
dato
Tensione digitale
multisegmento data
Pulsione digitale impostata
Impostato da tastierino o linea
seriale RS485
AI1 analogia esterna data
C16
Modalità
impostazione coppia
in inversione
AI2 analogia esterna data
AI3 analogia esterna data
-
0
Sì
Potenziometro su tastierino
dato
Tensione digitale
multisegmento data
Pulsione digitale impostata
Guadagno coppia
C17
0.0~300.0
%
200.0
Sì
dato
Le modalità di impostazione della copia in avanzamento e in inversione, possono essere
rispettivamente selezionate mediante l’utilizzo del tastierino/linea seriale RS485, del
potenziometro, della tensione digitale o della pulsione digitale e produranno così un segnale.
0: impostato da tastierino, impostato direttamente mediante C13 e C14.
1~6: C13 limite coppia in avanzamento = impostazione valore percentuale x il
guadagno dato dalla coppia C17.
C14: limite coppia in inversione = impostazione valore percentuale x il guadagno dato
dalla coppia C17.
Ad esempio: C15 modalità coppia in avanzamento impostata = potenziometro su tastierino
dato 4
Quando il potenziometro su tastierino dato A47=100%,C17=200.0%
C13 limite coppia in avanzamento =100%×200.0%=200.0%
Commutazione
Controllo velocità
0
C18
0
Sì
controllo
Controllo coppia
1
velocità/coppia
La modalità di controllo F00 quando seleziona il controllo vettore senza sensore o il controllo
vettore del loop chiuso con sensore, sarà possibile mediante l’inserimento del morsetto
controllare velocità e coppia.
Limite velocità in
C19
0.00~ frequenza massima
50.00
Sì
avanzamento
Limite di velocità in avanzamento, in caso di controllo della coppia
C20
Limite di velocità in
inversione
0.00~ frequenza massima
-
50.00
Sì
S
0.1
Sì
Limite di velocità in inversione, in caso di controllo della coppia
C21
Tempo accelerazione
coppia
0.0~200.0
Tempo accelerazione coppia da 0 a 300.0%.
109
C22
Tempo decelerazione
coppia
0.0~200.0
S
0.1
Sì
Tempo decelerazione coppia da 300.0% a 0.
Compensazione
0~100
%
30
Sì
bassa eccitazione
In caso di bassa velocità, la quantità di compensazione dell’eccitazione aumenterà le
funzionalità della coppia; in caso di soddisfazione dei requisiti, diminuire la quantità, per ridurre
la saturazione causata dall’aumento di temperatura.
C23
C24
Loop di corrente Ti
0~9999
ms
500
Sì
Definisce il tempo integrale del loop di corrente. Se il tempo è troppo lungo, la risposta sarà
lenta e il controllo dei disturbi esterni si indebolisce; se il tempo è troppo breve, la risposta sarà
veloce, ma potrebbero verificarsi delle vibrazioni.
C25
Loop di corrente P
0~1000
%
100
Sì
Defiisce il guadagno proporzionale del loop di corrente. Se il guadagno è grande, la risposta
sarà veloce, ma nel caso sia troppo grande, potrebbero verificarsi delle vibrazioni; se il
guadagno è piccolo, la risposta sarà lenta.
C26
PG marcia elettrica A
1~5000
-
1
Sì
C27
PG marcia elettrica B
1~5000
-
1
Sì
Quando esiste una differenza tra l'encoder e il motore, l'encoder è in grado di calcolare il
rapporto di cambio e l'attuale velocità del motore.
La marcia A è il genitore e la marcia B è il figlio.
C28
Pulsazioni PG
300~9999
-
2500
No
Tutte le pulsazioni PG utilizzate, stabiliscono il valore delle corrispondenti pulsazione per
ogni giro di motore.
Nessuna protezione in caso
0
di pausa del PG
Avviso e continuazione
1
Azione in caso di
dell’esecuzione
C29
3
Sì
pausa del PG
Avviso e decelerazione del
2
sistema
Avviso e arresto libero
3
Impostare la modalità di arresto in caso di pausa del PG
0: Nessuna protezione in caso di pausa del PG
1: avviso e continuazione dell’esecuzione
2: avviso e arresto del sistema
3: avviso e arresto libero
C30
Rotazione PG
Quando il motore è in
avanzamento, A è in fase di
anticipo
0
Quando il motore è in
avanzamento, B è in fase di
anticipo.
1
110
-
0
Sì
A Fase
A Fase
B Fase
B Fase
Fase anticipo A
Fase anticipo B
La direzione della rotazione dell’encoder, si riferisce alla direzione del motore in
avanzamento.
0: quando il motore è in avanzamento, A è in fase di anticipo, impostare C27 = 0
1: quando il motore è in avanzamento, B è in fase di anticipo, impostare C27 = 1
Nota: I valori descritti sopra sono validi se si utilizza l'encoder PG e la scheda PG, se
necessario contattare l'azienda.
Tempo di verifica
C31
0.0~10.0
s
1.0
No
pausa PG
Il segnale feedback del PG deve essere 0, nel caso superi il tempo impostato da C31, il
sistema riporterà l’errore pausa PG.
Impostare la velocità a 0 o C31 a O, senza necessità di verificare l'errore.
5-11 Gruppo parametri motore
Gruppo precedente Gruppo successivo
Cod
ice
Descrizione/ Display LCD
tastierino
b00
Frequenza nominale motore 1
b01
Corrente nominale motore 1
b02
Tensione nominale motore 1
b03
Coppie polo motore 1
b04
Velocità nominale motore 1
Campo impostazioni
Display LED 7
frammenti
0.00~massima
frequenza
Unit
à
Imposta
zioni di
fabbrica
Modi
fica
limiti
Hz
50.00
Sì
y09*(50%~100%)
A
★
Sì
100~1140
V
★
Sì
1~8
-
2
Sì
500~5000
rpm
1480
Sì
b00~b04 sono i parametri targa del motore, che influenzano la precisione. Eseguire
l’impostazione in accordo con tali parametri.
Dopo aver verificato i parametri targa b00~b04, sarà necessario ricalcolarli utilizzando b11.
Le funzioni eccellenti di controllo vettore, richiedono che questi paramentri siano precisi.
La precisione dei suddetti parametri è strettamente connessa a una corretta impostazione
dei parametri nominali.
Per assicurare una corretta funzione di controllo, è necessario che i parametri del
convertitore corrispondano al motore e che la corrente nominale del motore sia limitata dalla
corrente nominale del convertitore tra 30%~100%.
La corrente nominale del motore può essere impostata, ma non deve superare la corrente
nominale del convertitore. Questo parametro conferma la capacità di protezione OL del motore e
l’esecuzione in modalità risparmio energia.
Per prevenire il surriscaldamento del motore quando è in esecuzione a bassa velocità e per
evitare cambiamenti relativi alla capacità del motore, quando le caratteristiche cambiano, l’utente
111
potrà correggere i parametri per salvaguadare il motore.
Le coppie polo del motore possono essere impostate su 4 il polo motore e su 2 la coppia
polo.
b05
Alimentazione caricata motore 1
0.0~b01
A
★
Sì
b06
Resistenza statore motore 1
0.000~30.000
ohm
★
Sì
b07
Resistenza rotore motore 1
0.000~30.000
ohm
★
Sì
b08
Induzione statore motore 1
0.0~3200.0
mH
★
Sì
b09
Induzione reciproca motore 1
0.0~3200.0
mH
★
Sì
I parametri b05~b09 possono essere inseriti attraverso parametro attuale del motore e
possono attraverso la funzione misura del parametro salvarsi e riaggiustarsi automaticamente.
Nel caso si conoscano i parametri corretti, possono essere inseriti manualmente.
Quando b11 è impostato su 1,2,3, il sistema effettuerà il calcolo e la misurazione in
automatico.
I parametri b05~b09 sono i parametri elettrici di base del motore, è necessario che
raggiungano il calcolo di controllo vettoriale.。
b10
Selezione motore
Motore 1
0
Motore 2
1
-
0
No
Il sistema può selezionare uno qualunque dei gruppi parametro motore.
La misurazione dei parametri motore consente di modificare e salvare i parametri nella
rispettiva area automaticamente.
Nessuna misurazione
b11
Misurazione
parametri motore
Misurazione calcolata
utilizzando i dati targa
Misurazione statica
convertitore
Misurazione rotazione
covertitore
0
1
2
-
0
No
3
Impostare qualunque parametro da misurare,in modo che sia possibile che b10 selezioni
l’esempio motore numero 1.
0: Nessuna misurazione
1: Misurazione calcolata utilizzando i dati targa
In base ai parametri targa b00~b04, il calcolo automatico dei parametri motore b00~b04 e
così via, il principale vantaggio è che non richiede la corrente elettrica per la messa a punto, è
adatto ai quattro poli motore utilizzando gli utilizzi generali della serie Y, gli altri tipi di motore
possono essere adattati sulla base di questo parametro.
Misurazione statica convertitore
Nel caso non sia possibile effettuare la misurazione dei parametri del motore senza carica,
sarà possibile scegliere la modalità misurazione statica del convertitore.
Assicurarsi che il motore sia impostato sullo stato statico, dopo aver effettuato una
misurazione statica, è possibile adattare tutti i parametri manualmente, per ottenere un controllo
ottimale.
Impostare b11 su 2, il convertitore inzierà automaticamente la misurazione dei parametri。
L’area visualizzazione dei numeri sul tastierino visualizza “-RUN”:aspettare l’esecuzione
112
del comando, avviare misurazione.
L’area visualizzazione numeri del tastierino visualizza “CAL1”, nessun risultato.
L’area visualizzazione numeri sul tastierino visualizza “CAL2”, il convertitore ha un risultato,
stato statico.
L’area visualizzazione numeri sul tastierino visualizza “-END”, misurazione terminata.
L’area visualizzazione numeri sul tastierino visualizza “E.CAL”, si è verificato un errore
durante il processo di misurazione.
Il processo di misurazione può essere interrotto mediante il pulsante STOP.
3 Misurazione rotazione covertitore
È possibile effettuare la misurazione dei parametri senza la carica, selezionando la modalità
misurazione rotazione convertitore. Quando si avvia la misurazione, assicurarsi che il motore sia
in stato statico.
Durante la misurazione statica del convertitore, prestare attenzione al momento di uscita
della carica elettrica.
Dopo aver impostato b 11 su 3, il convertitore avvierà automaticamente la misurazione dei
parametri.
L’area visualizzazione numeri sul tastierino visualizza “-RUN”:aspettare l’esecuzione del
comando, avviare misurazione.
L’area visualizzazione numeri sul tastierino visualizza “CAL1”, “CAL3”nessun risultato.
L’area visualizzazione numeri sul tastierino visualizza “CAL2”, il convertitore ha un risultato,
stato statico.
L’area visualizzazione numeri sul tastierino visualizza “CAL4”, il convertitore ha un risultato,
stato .
L’area visualizzazione numeri sul tastierino visualizza “-END”: misurazione terminata.
L’area visualizzazione numeri sul tastierino visualizza “E.CAL”: si è verificato un errore
durante il processo di misurazione.
Il processo di misurazione può essere interrotto mediante il pulsante STOP.
Impostare questo parametro, il motore procederà dinamicamente alla misurazione dei
parametri. Assicurarsi che il motore sia senza carica (esecuzione senza carica).
Prima di effettuare le impostazioni, assicurarsi di essere ben preparati all’esecuzione, il
motore opererà ad alta velocità durante la misurazione.
Al termine dell’operazione di misurazione, b11 ritornerà su 0. i parametri se correttamente
misurati si salveranno automaticamente in b05~b09 o b18~b22, secondo quante indicato da
b10 sulla selezione dei parametri motore。
Nota:
Prima di effettuare la misurazione automatica dei parametri del motore, è necessario
immettere correttamente i parametri motore nominali b00~b04 o b13~17.
Regolare correttamente il tempo di accelerazione e decelerazione e il parametro aumento
coppia, perché durante il processo di autoregolazione si potrebbero verificare degli errori di
sovra voltaggio o sovracorrente.
In caso di autoregolazione, il motore deve essere impostato in stato di arresto.
Vettore controllo
Nessuna verifica R1
0
b12
0
No
avvia verifica R1
Verifica R1
1
b13
Frequenza nominale
0.00~frequenza massima
113
Hz
50.00
Sì
motore 2
b14
b15
b16
b17
b18
b19
b20
b21
b22
Corrente nominale
motore 2
Tensione nominale
motore 2
y09*(50%~100%)
A
★
Sì
100~1140
V
★
Sì
1~8
-
2
Sì
500~5000
rp
m
1480
Sì
0.0~b14
A
★
Sì
★
Sì
★
Si
★
Sì
★
Sì
Coppia polo motore 2
Velocità nominale
motore 2
Corrente caricata
motore 2
Resistenza statore
motore 2
Resistenza rotatore
morore 2
Induzione statore
motore 2
Induzione reciproca
motore 2
oh
m
oh
m
m
H
m
H
0.000~30.000
0.000~30.000
0.0~3200.0
0.0~3200.0
Il sistema può impostare il secondo gruppo di parametri, le definizioni sono le medesime del
gruppo 1.
5-12 Gruppo parametri sistema
Gruppo precedente……gruppo successivo
Cod
ice
Descrizione Display
LCD tastierino
Campo impostazioni
Display LED 7 frammenti
Nessun azione
y00
Reimpostazione
parametri sistema
Reimpostazione paramentri
del sistema mediante area
memoria 1 tastierino.
Reimpostazione paramentri
del sistema mediante area
memoria 2 tastierino
Reimpostazione paramentri
del sistema mediante area
memoria 3 tastierino
Reimpostazione paramentri
del sistema mediante area
memoria 4 tastierino
Reimpostazione parametri
con i valori di fabbrica
Unità
Impostazi
oni di
fabbrica
Modi
fica
limiti
-
0
No
0
1
2
3
4
5
Quando questi parametri sono impostati come validi, tutte le relative funzioni si reimposteranno
con i valori di fabbrica. I parametri senza le impostazioni di fabbrica, verranno salavti come nella
precedente impostazione valori.
Caricamento
y01
0
No
Nessun azione
0
parametri sul
tastierino
Caricamento parametri
1
sistema in area memoria
114
tastierino 1
Caricamento parametri
sistema in area memoria
tastierino 2
Caricamento parametri
sistema in area memoria
tastierino 3
Caricamento parametri
sistema in area memoria
tastierino 4
Liberare area memoria
tastierino 1,2,3,4
2
3
4
5
0:Nessun azione
1:Caricamento parametri sistema in area memoria tastierino 1
2:Caricamento parametri sistema in area memoria tastierino 2
3:Caricamento parametri sistema in area memoria tastierino 3
4:Caricamento parametri sistema in area memoria tastierino 4
5:Liberare area memoria tastierino 1,2,3,4
y02
Ultimo rapporto errori
y03
Rapporto errori 1
y04
Rapporto errori 2
y05
Rapporto errori 3
y06
Rapporto errori 4
y07
Rapporto errori 5
Numero ultimo rapporto errori
Premere il pulsante [PRG] e [▲/▼] per
verificare frequenza, corrente e stato
dell’esecuzione al momento dell’errore.
-
0
Sì
-
-
Sì
Se si verificano frequentemente questo tipo di errori, mediante il pulsante PRG o il pulsante
"plus o minus”è possibile monitorare il valori dell’oggetto al momento dell’errore.
Monitoraggio oggetto in condizioni di errore:
0: tipo di errore
Il tipo di errore viene espresso da uno dei seguenti codici di errore:
Numero di
serie
Display
LED
Informazioni sull’errore
0
E.OCP
Il sistema viene ha rilevato un aumento momentaneo della
corrente
1
E.OCC
Segnale di sovracorrente dal circuito elettrico verificato
2
E.OCF
Segnale di sovracorrente o sovravoltaggio dall’unità circuito.
3
E.OU
Sovravoltaggio
4
E.LU
Sottovoltaggio
5
E.OL
Sovracarico
6
E.UL
Sottocarico
7
E.PHI
Ingresso alimentazione di fase
8
E.EEP
Errore EEPROM
9
E.ntC
Sovrariscaldamento
10
E.dAt
Superamento limite tempo
115
11
E.Set
Errore esterno
12
E.PId
Errore regolazione PID
13
E.OHt
Errore sovrariscaldamente motore
14
E.OL2
Errore sovracarico motore
15
E.PG
Errore PG
16
E.PHo
Covertitore uscita di fase
17
E.COA
Errore comunicazione linea seriale RS485 e morsetto A
18
E.COb
Errore comunicazione linea seriale RS485 e morsetto B
19
E.CAL
Errore identificazione parametri
1: Impostare la frequenza al momento dell’errore
Frequenza in uscita del convertitore al momento dell’errore.
2: frequenza in uscita al momento dell’errore
Frequenza in uscita dal convertitore al momento dell’errore
3: corrente in uscita al momente dell’errore
Corrente reale in uscita al momento dell’errore.
Tensione DC al momento dell’errore
Tensione reale in uscita al momento dell’errore
5: stato di esecuzione al momento dell’errore
Stato di esecuzione del motore al momento dell’errore.
6: tempo di esecuzione al momento dell’errore
Tempo di questa esecuzione del motore al momento dell’errore.
7: temperatura IGBT del convertitore al momento dell’errore.
Temperatura IGBT del convertitore
Il display LED visualizza lo stato di esecuzione, come spiegato di seguito:
Primo bit LED
Secondo bit LED
F
Comando
avanti
F
Stato in
avanzamento
R
Comando
indietro
R
Stato in
inversione
S
Comando di
arresto
y08
S
Ripristino rapporto
errori
Terzo bit LED
Separazione
segnali
Quarto bit LED
A
Accelerazione
nell’esecuzione
D
Decelerazione
nell’esecuzione
E
Stessa velocità
di esecuzione
S
Stato di arresto
Stato di arresto
Nessun azione
0
Ripristino
1
0: Nessun azione, mantiene il rapporto errori
1: Ripristina il rapporto errori.
Corrente nominale in
y09
0.1~1000.0
uscita
-
0
Sì
A
★
No
V
★
No
Corrente nominale in uscita dal convertitore.
y10
Tensione nominale in
100~1140
116
entrata.
Tensione nominale in entrata nel convertitore, i livelli di tensione in entrata nel convertitore
devono essere impostati prima dell’uscita dalla fabbrica.
80
y11
Serie prodotti
Codice
famiglia
0
3
Serie
prodotti
Livello
immissione
tensione
-
No
★
Serie prodotti (sulla base del codice famiglia del converitore/ della serie del prodotti/ delle
impostazioni relative al livello di tensione)
Codice famiglia prodotto
Codice famiglia prodotto
1:Monofase 220V
2:Trifase 220V
3:Trifase 380V
4:Trifase 460V
5:Trifase 570V
6:Trifase 660V
9:Trifase 1140V
Serie prodotto :
0:Carica leggera (F)
1:Carica standard (G)
2:Carica piuttosto pesante (M)
3:Carica pesante(H)
6:Modello specializzato nelle
machine tessili (S)
7:Modello specializzato per
macchinari di sollevamento (T)
8:Modello specializzato per
pressa ad iniezione (Z)
y12
Versione software
-
-
-
No
A 100
A:Pannello regolare
B:Pannello specializzato
C:Pannello misurazione
Numero versione pannello
y13
Data prodotto - Anno
anno
-
-
No
y14
Data prodotto - Mese
Giorno
Mese Giorno
-
-
No
y15
Input di decodifica
utente
-
-
Sì
0~9999
Campo impostazioni
Rapporto sulle volte di
sbagliato inserimento
della password
Informazioni display
In caso di blocco dei parametri, verranno visualizzate le volte in cui si è verificato un errore
nell’inserimento della password.
Esiste un limite di tre volte per l'inserimento della password, nel caso si superino le tre volte il
sistema non permetterà un nuovo inserimento. Si prevengono in questo modo prove illegali di
immissione password. Sarà necessario riavviare il motore e quindi inserire la password
nuovamente. Sarà necessario inserire la password corretta solo una volta su tre e i parametri
verranno sbloccati.
Inserimento
y16
Sì
0~9999
Campo impostazioni
password utente
Password non
impostata o
decodificazione
117
deco
Informazioni display
password
corretta
Parametri
code
bloccati
Per impostare la protezione password, il campo impostazione è 0~9999. Dopo aver impostato
la password, i parametri si bloccheranno e sul tastierino si visualizzerà "code”. Eliminando la
password o inserendo la password corretta, sul tastierino si visualizzerà “deco”.
Impostare la password su 0, eliminare le impostazioni password utente, ricollegare
all’alimentazione elettrica per tornare sullo stato decodifica.
Gruppo corrispondente alla protezione
parametri, dopo aver impostato la
Gruppo parametri
y17
0000
Sì
password.
protezione
Impostare su 0: modifiche non permesse
Impostare su 1: modifiche permesse
9
8
7
6
5
4
3
2 2 2 2 2 2 2 2
2
2
9 8 7 6 5 4 3 2 1
1
2
0
0
F Gruppo
A Gruppo
O Gruppo
H Gruppo
U Gruppo
P Gruppo
E Gruppo
C Gruppo
B Gruppo
Y Gruppo
118
CAPITOLO 6: DIAGNOSI DELLE ANOMALIE E
RELATIVE SOLUZIONI
6-1 Anomalie e soluzioni
Problema
Il tastierino non è in
grado di eseguire il
controllo
Il potenziometro
non è in grado di
regolare la velocità
Il motore non
effettua la rotazione
Possibile causa
Errore impostazione
modalità controllo
esecuzione
Errore impostazione
frequenza
Verificare F04, F05
Errore impostazione
modalità controllo
Verificare F05
Errore impostazione
frequenza
Verificare F03, F04
Il display LED
visualizza un messaggio
di errore
Premendo il pulsante RESET o il
morsetto per il ripristino
dell’errore, in base alle relative
informazioni, l’errore verrà
riconosciuto e risolto.
Nessuna tensione nei
morsetti DC+1,DC+2
Verificare la tensione dei morsetti
R,S,T e caricare il circuito
Uscita inesistente o
anormale nei morsetti
U,V,W
Verificare tutte le modalità
controllo impostazioni e i
parametri di frequenza,controllare
lo stato del morsetto, se è operato
da un morsetto esterno.
Riavvio dopo un
abbassamento della
corrente o riavvio
esecuzione libera
Controllare lo stato operativo delle
impostazioni
Verificare F05
Visualizzazione errore
E.OCP
Verificare le condizioni di carico,
quindi confermare la correttezza
della selezione del modello
Il sistema ha ricevuto un disturbo
o una sovracarica istantanea
Visualizzazione errore
E.OCC
Il segnale OC proviene dal
circuito di verifica della corrente
Visualizzazione errore
E.OCF
Il segnale OC proviene dal
circuito drive
Sovracarico di corrente
durante l’accelerazione
Reimpostare e regolare di nuovo
F09,F20,F21
Sovracarico di corrente
durante la decelerazione
Reimpostare e regolare di nuovo
F10,F22,F23
Eccessivo sovracarico
del motore
Sovracarico E.OC
Soluzione
119
Durante l’avvio,
l’abbassamento di
tensione ha provocato il
sovracarico
Sovracarico
E.OL
Sovratensione
E.OU
Sottotensione
E.LU
Regolare correttamente le
impostazioni F06
Sovracarico durante
l’esecuzione
Verificare le condizioni di
cambiamento di carico, quindi,
eliminarle
Sovracarico durante
l’avvio o l’esecuzione
Verificare la possibilità di un
leggero cortocircuito o di un
grounding
Disturbi
Verificare le condizioni dei fili,
dei cavi schermati da terra e dei
morsetti
Eccessivo sovracarico
Abbassare la carica, aumentare
l’intervallo di carica consentito
dalle impostazioni b04、b14 o
aumentare la regolazione di A24
per aumentare il livello di
protezione termica.
Impostazione parametro
non corretta
Modificare b04、b14, in caso di
sovracarico motore consentito.
Superamento limiti di
tensione elettrica
Verificare la correttezza della
tensione. Verificare la correttezza
delle impostazioni relative alla
tensione nominale del
convertitore.
Decelerazione troppo
veloce
Regolare F10
Carica con eccessiva
inerzia
Diminuire la carica o aumentare la
capacità del convertitore, o
aumentare la resistenza
Tensione troppo bassa
Verificare la correttezza della
tensione. Verificare la correttezza
delle impostazioni relative alla
tensione nominale del convertitore
Temporanea mancanza
di alimentazione
Aggiungere le opzioni alle caselle
di scelta
Capacità limitata della
linea o improvviso
aumento della corrente
sulla linea
Migliorare il sistema di fornitura
elettrica
Temperatura ambiente
troppo alta
Migliorare le condizioni
ambientali
120
Sovrariscaldamento
E.OHt
Temperatura ambiente
troppo alta
Migliorare le condizioni
ambientali
Mancata esecuzione
della ventola di
raffreddamento
Verificare A27, ridurre la
temperatura della ventola in avvio
(se esiste un controllo della
ventola)
Frequenza portante
troppo alta
Verificare le impostazioni F16
Nota:
* Spegnere l’alimentazione e non toccare il PCB e le parti interne alla macchina
almeno per cinque minuti da quando non si visualizza più la scritta “!CHARGE”;
prima dell’esecuzione fare attenzione alle scosse elettriche.
* Non toccare il PCB o l’IGBT o altre componenti interne, a meno che non si voglia
impedire l’elettricità statica. In caso contrario, i componenti potrebbere danneggiarsi.
121
CAPITOLO 7 SPECIFICHE STANDARD
7-1 Specifiche tecniche
7-1-1 Specifiche tecniche PI8000
Codice
convertirore
Carica leggera
serie F
Carica
standard
serie G
Carica
media serie
M
Carica
forte serie
H
PF
IF
PG
IG
PM
IM
PH
IH
KW
A
KW
A
KW
A
KW
A
Codice
struttura
Tensione elettrica trifase 380V 50/60Hz
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
15
32
11
25
7.5
16
7.5
16
8N3
18.5
38
15
32
11
25
11
25
8N3
22
45
18.5
38
15
32
11
25
8N4
30
60
22
45
18.5
38
15
32
8N4
37
75
30
60
22
45
18.5
38
8N5
45
90
37
75
30
60
22
45
8N5
55
110
45
90
37
75
30
60
8N6
75
150
55
110
45
90
37
75
8N6
93
170
75
150
55
110
45
90
8N7
110
210
93
170
75
150
55
110
8N7
132
250
110
210
93
170
75
150
8N8
160
300
132
250
110
210
93
170
8N8
187
340
160
300
132
250
110
210
8NA
200
380
187
340
160
300
132
250
8NA
220
415
200
380
187
340
160
300
8NA
250
470
220
415
280
520
250
470
122
8NA
200
380
187
340
8NB
VFR
1080●●●□3
VFR
1080●●●□3
VFR
1080●●●□3
315
600
280
520
220
415
200
380
8NB
355
640
315
600
250
470
220
415
8NB
400
750
355
640
280
520
250
470
8NB
7-1-2 Specifiche tecniche VFR 1081
Codice
convertitore
Carica
leggera
serie F
Carica
standard
serie G
Carica
media serie
M
Carica forte
serie H
PF
IF
PG
IG
PZ
IZ
PH
IH
kW
A
kW
A
kW
A
kW
A
Codice
struttur
a
Tensione elettrica monofase 220V 50/60Hz
VFR
1081●●●□1
VFR
1081●●●□1
VFR
1081●●●□1
VFR
1081●●●□1
VFR
1081●●●□1
VFR
1081●●●□1
0.75
4
0.4
2.5
7N3
1.5
7
0.75
4
0.4
2.5
1.5
7
0.75
4
0.4
2.5
7N3
7N3
2.2
10
2.2
10
1.5
7
0.75
4
7N4
4
16
4
16
2.2
10
1.5
7
7N4
5.5
20
5.5
20
4
16
2.2
10
7N5
Carica elettrica trifase 220V 50/60Hz
VFR
1081●●●□2
VFR
1081●●●□2
VFR
1081●●●□2
VFR
1081●●●□2
VFR
1081●●●□2
VFR
1081●●●□2
0.75
4
0.4
2.5
7N3
1.5
7
0.75
4
0.4
2.5
1.5
7
0.75
4
0.4
2.5
7N3
7N3
2.2
10
2.2
10
1.5
7
0.75
4
7N4
4
16
4
16
2.2
10
1.5
7
7N4
5.5
20
5.5
20
4
16
2.2
10
7N5
Carica elettrica trifase 380V 50/60Hz
VFR
1081●●●□3
VFR
1081●●●□3
VFR
1081●●●□3
0.75
2.5
0.75
2.5
0.75
2.5
7N3
1.5
3.7
1.5
3.7
1.5
3.7
1.5
3.7
7N3
2.2
5
2.2
5
2.2
5
2.2
5
7N3
123
VFR
1081●●●□3
VFR
1081●●●□3
VFR
1081●●●□3
VFR
1081●●●□3
4
8.5
4
8.5
4
8.5
5.5
13
5.5
13
5.5
13
7.5
16
7.5
16
7.5
16
11
25
4
8.5
7N4
7N4
5.5
13
7N5
7.5
16
7N5
7-1-3 Tabella della corrente nominale per le differenti specifiche
G/F/H/S/Z/T/M
Tensio
ne
Potenza
(kW)
0.4
220V
1Ф
Corrente
(A)
2.5
220V
(240V)
Corrente
(A)
2.5
380V
(415V)
Corrente
(A)
-
460V
(440V)
Corrente
(A)
-
0.75
4
4
2.5
2.5
-
-
1.5
7
7
3.7
3.7
-
-
2.2
10
10
5
5
-
-
575V
660V
Corrente
(A)
-
Corrente
(A)
-
4
16
16
8.5
8
-
-
5.5
-
20
13
11
-
-
7.5
-
30
16
15
-
-
11
-
42
25
22
17
15
15
-
55
32
27
22
18
18.5
-
70
38
34
26
22
22
-
80
45
40
33
28
30
-
110
60
55
41
35
37
-
130
75
65
52
45
45
-
160
90
80
62
52
55
-
200
110
100
76
63
75
-
260
150
130
104
86
93
-
320
170
147
117
98
110
-
380
210
180
145
121
132
-
420
250
216
173
150
160
-
550
300
259
207
175
187
-
600
340
300
230
198
200
-
660
380
328
263
218
220
-
720
415
358
287
240
250
-
-
470
400
325
270
124
280
-
-
520
449
360
330
315
-
-
600
516
415
345
355
-
-
640
570
430
370
400
-
-
750
650
520
430
500
-
-
920
800
650
540
7-2 Specifiche degli standard
Elemento
Specificazione
A
Monofase 200~240V,50/60Hz Trifase 200~240V,
li
50/60Hz;
m Livello
Trifase 380~415V,50/60Hz trifase 440~460V,
e frequenza
50/60Hz;
tensione
nt
Trifase 575V,50/60Hz
trifase 660V,50/60Hz;
a
Trifase 1140V,50/60Hz
zi
o Intervallo
Tensione: ±15% Frequenza: ±5%
n fluttuazione
e consentito
C Controllo
Convertitore vettoriale ad alte prestazioni di controllo
o sistema
sulla base di 32 bit DSP.
nt
Modello G/F/Z/S/T/M: 0.00~800.0Hz, massima
r
frequenza impostata tra 10.00~800.0Hz; modello H:
ol Frequenza di
0.00~2000.0Hz, massima frequenza impostata tra
lo uscita
10.00~800.0Hz
Controllo
Sensore di controllo
Modalità
Controllo
V/F
vettore
senza
vettore in anello
controllo
sensore
chiuso
Coppia di
avvio
Campo
regolazione
Precisione
stabilizzazio
ne velocità
Modalità
generazione
forme d’onda
Incremento
funzione
automatica di
coppia
Controllo
accelerazione
decelerazion
e
Controllo
tempo
prolungato
esecuzione
0.50Hz 180%
0.25Hz 180%
0.00Hz 180%
1:100
1:200
1:2000
±0.5%
±0.2%
±0.02%
Spazio vettoriale asincronico PWM, spazio vettoriale
nessuna classe sub-sincronico PWM; spazio vettoriale
due fasi ottimizzazione PWM.
Ottiene modalità controllo V/F frequenza bassa e
controllo coppia entrata alta.
Modalità accelerazione decelerazione della curva S subset, tempo massimo di accelerazione e decelerazione 3200
giorni.
Processo esecuzione a 16 segmenti di velocità, tempo
massimo di esecuzione 3200 giorni.
125
Correttezza
impostazioni
frequenza
Precisione
frequenza di
uscita
Digitale: 0.01Hz(300Hzin giù),0.1Hz(300Hz in sù);
Simulazione: 1% di massima frequenza
Modalità
curva V/F
Lineare, 1,2 volte di potenza, 1,7 volte di potenza, 2 volte
di potenza, l’utente imposta gli 8 segmenti della curva
V/F.
Modello G/S: corrente nominale 150%-1 minuto,
corrente nominale 200%-0.1 secondo;
Modello F: corrente nominale 120%-1 minuto, corrente
nominale 150%-0.1 secondo;
Modello Z/M/T: corrente nominale 180%-1 minuto,
corrente nominale 250%-0.1 secondo;
Modello H: corrente nominale 250%-1 minuto, corrente
nominale 300%-0.1 secondo.
Capacità di
sovracarico
e
s
e
c
u
zi
o
n
e
Compensazio
ne
scorrimento
Modalità di
esecuzione
Segnale di
avvio
Arresto di
emergenza
Reset
dell’errore
Stato di
esecuzione
DC freno
P
r
ot
e
zi
o
n
e
Protezione
convertitore
Display
temperatura
IGBT
Controllo
ventole
convertitore
Riavvio
istantaneo
dopo
mancanza di
alimentazion
e
Tolleranza controllo velocità:0.01%(25℃±10℃).
Il controllo V/F è in grado di compensare
automaticamente il deterioramento.
Comunicazione / tastierino / morsetto
In avanzamento, in inversione, jog (modalità controllo
parametri), jog di avanzamento, jog di inversione.
Interrompe gli output del controller。
Quando la funzione di protezione è attiva, sarà possibile
resettare l’errore automaticamente o manualmente.
Display stato del motore, arresto, accelerazione,
decelerazione, stato di esecuzione del processo.
Flusso di corrente freno regolare PID incorporato nelle
premesse, per garaneìtire una coppia freni adeguata.
Protezione da sovratensioni, protezione da cali di
tensione, protezione da sovracarico, protezione da
sovracorrente, protezione da eccessivo riscaldamento,
protezione dalla perdità di velocità, protezione dalla
perdita di tensione, protezione dalle fasi (opzionale),
errori esterni, errori di comunicazione, anormalità segnale
feedback PID, errori PG.
Visualizza la temperatura corrente IGBT。
La temperatura di avvio delle ventole può essere
impostata (opzionale)
Meno di 15 millesimi di secondo: continuazione
dell'esecuzione
Più di 15 millesimi di secondo: Rilevazione automatica
della velocità del motore, riavvio istantaneo dopo la
mancata alimentazione.
126
Modalità
monitoraggio
velocità di
avvio
Funzione
protezione
parametri
8 vie di
ingresso
interruttore
I
O
Tre vie
analoghe di
input
Due vie
analoghe di
input
c
o
m
u
Protegge i parametri del convertitore, mediante
l’impostazione della password e della codifica.
È possibile impostare 47 diverse tipologie di
personalizzazione tra le quali avanzamento, inversione,
jog di avanzamento, jog di inversione, arresto di
emergenza, reset, velocità, velocità di accelerazione,
interruzione tempo esecuzione, calcolo pulsazioni.
Definisce l’ingresso dell’interruttore
Consente un intervallo input -10V~10V、0~20mA。
Consente un intervallo input 0~10V,0~20mA。
Impostazione
frequenza
È possibile impostare il morsetto virtuale, mediante
l'utilizzo della comunicazione o della porta IO del
controllo tastierino o della porta IO dello stato di
visualizzazione.
6 modalità principali + 7 modalità ausialiari, tastierino, 3
modalità di input analogico, input pulsazione,
potenziometro digitale.
Cavi
tastierino
Doppia porta
tastierino
Cavo 8-core adeguato agli standard EIA T568A ,EIA
T568B
Supporto doppia porta, controllo sincronizzato e
indipendente.
Tasti doppi e
multifunzion
e
MF1,MF2 possono essere personalizzati in nove
modalità tra le quali addizione e sottrazione,
avanzamento, inversione, jog di avanzamento, jog di
inversione, arresto di emergenza e up down.
4 parametri
di
salvataggio
Il pannello di controllo è in grado di realizzare 4 gruppi di
parametri del convertitore di upload, download con la
password del produttore per resettare le impostazioni di
fabbrica.
Informazioni
di esecuzione
Visualizza al massimo 3 parametri di monitoraggio allo
stesso tempo. Selezionare attarverso A00, A01, A02.
Informazioni
di errore
Salva al massimo 5 gruppi di messaggio di errore, è
possibile verificare la tipologia di errore nel momento in
cui questo si verifica, impostare frequenza, frequenza in
uscita, tensione in uscita, corrente in uscita, stato di
esecuzione, tempo di esecuzione, temperatura IGBT.
Doppia porta
LINEA
SERIALE
RS485
Porta del tastierino/linea seriale RS485 ed è possibile
selezionare la modalità di comunicazione/ Linea seriale
RS485, che è completamente isolata.
Funzione
morsetto
virtuale
ta
st
ie
ri
n
o
Monitora automaticamente la velocità al momento
dell’avvio del convertitore.
127
ni
c
a
zi
o
n
e
m
ul
ti
v
el
o
ci
tà
P
I
D
m
ot
o
re
CAN BUS
CAN BUS
È possibile selezionare il modulo CAN
Velocità 16
segmenti
È possibile impostare al massimo 16 segmenti (è possibile
utilizzare il morsetto multifunzione per effettuare lo
spostamento o l’esecuzione del programma)
Tempo
esecuzione 8
segmenti
É possibile impostare il tempo di esecuzione al massimo a
8 segmenti (è possibile utilizzare il morsetto
multifunzione per effettuare lo spostamento)
Accelerazion
e velocità 8
segmenti
É possibile impostare il tempo di accelerazione della
velocità al massimo a 8 segmenti (è possibile utilizzare il
morsetto multifunzione per effettuare lo spostamento).
Configurazio
ne velocità 7
segmenti
É possibile configurare la velocità al massimo a 7
segmenti (è possibile utilizzare il morsetto multifunzione
per effettuare lo spostamento)
Segnale
feedback PID
Segnale dato
PID
2 gruppi di
parametri
motore
3 modalità di
identificazione
5 parametri
targa
6 modalità, tastierino, 3 vie di input analogico, input
pulsazione, potenziometro digitale.
6 modalità, tastierino, 3 vie di input analogico, input
pulsazione, potenziometro digitale
I parametri del motore possono essere selezionati e salvati
automaticamente.
Calcolo targa, misurazione statica, misurazione rotazione.
Frequenza nominale, corrente nominale, tensione
nominale, numero di coppie polo, velocità nominale.
5 parametri di Mancanta alimentazione, resistenza statore, resistenza
identificazione rotore, induzione statore, induzione reciproca.
a
m
bi
e
nt
e
Temperatura
ambiente
Uso declassamento -10℃~40℃,40~50℃, aumenta di
1℃ per ogni uso, corrente nominale in uscita diminuisce
dell’1%.
Stoccaggio
temperatura
Unidità
ambiente
-40℃~+70℃
Altezza
vibrazioni
5~ 95 % , nessuna condensazione
0~2000 metri, uso declassamento 1000 metri in sù,
incrementato di 100 metri, la corrente nominale in uscita
diminuisce dell'1%.
128
Posizione
applicazioni
Montare in posizione verticale all’interno del quadro
elettrico in buone condizioni di ventilazione, non montare
in posizione orizzontale o in altri tipi di installazione.
Installare in assenza di luce solare diretta, tenere lontano
da polvere, gas corrosivi, esplosivi, nebbia d’olio, vapore,
fenomeni di sgocciolamento.
Modalità
raffreddamen
to
Raffreddamento ad aria forzato e raffreddamento ad aria
naturale.
7-3 Dimensioni
7-3-1 Serie VFR 1080 (tensione elettrica trifase 380~415V,50/60Hz)
※ 8N3~8N8
W
b
H
d
DIGITAL PANEL
FWD
REV
ALARM
+
Hz
%
A
-
℃
s
V
ENTER
+
PRG
MF2
FWD
ESC
STOP/RESET
a
L
SET
MF1
1. 8N3
Modello
F
Potenza Numero
(kW) struttura
Dimensioni
Dimensioni installazione
L
W
H
a
b
d
360
235
207
340
150
Ø10
15~18.5
G
11~15
M
7.5~11
H
7.5~11
8N3
2. 8N4
Modello
Potenza Numero
Dimensioni
129
Dimensioni installazione
(kW)
F
22~30
G
18.5~22
M
15~18.5
H
11~15
struttura
L
W
H
a
b
d
8N4
410
264
242
390
165
Ø10
3. 8N5
Modello
Dimensioni
Potenza Numero
(kW)
struttura
L
W
H
a
b
d
560
300
243
540
200
Ø10
F
G
M
H
37~45
30~37
22~30
18.5~22
Modello
Potenza
(kW)
Numero
struttura
F
G
M
H
55~75
45~55
37~45
30~37
8N6
Modello
Potenza
(kW)
Numero
struttura
F
G
M
H
93~110
75~93
55~75
45~55
8N5
Dimensioni installazione
4. 8N6
Dimensioni
Dimensioni installazione
L
W
H
a
b
d
660
365
293
640
250
Ø10
5. 8N7
8N7
Dimensioni
Dimensioni installazione
L
W
H
a
b
d
710
455
293
690
350
Ø10
6. 8N8
Modello
F
G
M
H
Dimensioni
Potenza Numero
(kW)
struttura
132~160
110~132
93~110
75~93
8N8
Dimensioni installazione
L
W
H
a
b
d
910
480
342
890
350
Ø10
130
2.8NA
壁挂安装孔
a
Modello
Potenza
(kW)
F
187~250
G
160~220
M
132~187
H
110~160
Dimensioni
Dimensioni installazione
Numero
struttura
L
W
H
a
b
d
8NA
1540
515
443
465
367
Ø13
131
L
3.8NB
W
H
Porta collegamento
fili posteriore、
d
Fondo
b
Porta collegamento
fili in basso
a
Modello
Potenza
(kW)
F
280~400
G
250~355
M
200~280
H
187~250
Dimensioni
Dimensioni installazione
Numero
struttura
L
W
H
a
b
d
8NB
1700
850
492
640
260
Ø13
132
7-3-2 Serie VFR 1081
1. 7N2~7N4
7N2
Tipologia corrente Modello
Monofase 220v
Trifase
220v
Trifase
380v
F
G
M
H
F
G
M
H
F
G
M
H
DIGITAL PANEL
FWD
REV
ALARM
+
Hz
A
-
%
s
°C
-
V
SET
R
PRG
EN TE
S00 Set di F
0.00
0.0
S01 Effettiva F
S10 PID Feedback
valore
MF1
MF2
ESC
STOP/RESET
Potenza (kW)
0.75~1.5
0.4~1.5
0.4~0.75
0.4
0.75~1.5
0.4~1.5
0.4~0.75
0.4
1.5~2.2
0.75~2.2
0.75~2.2
0.75~2.2
+
1)
FWD
133
7N3
Tipologia corrente
Monofase 220v
Trifase
220v
Trifase
380v
Modello
Potenza (kW)
F
2.2~4
G
2.2~4
M
1.5~2.2
H
0.75~1.5
F
2.2~4
G
2.2~4
M
1.5~2.2
H
0.75~1.5
F
4~5.5
G
4~5.5
M
4~5.5
H
4
DIGITAL PANEL
FWD
REV
ALARM
+
Hz
%
A
-
s
°C
-
V
EN TE
S00 Set Fre.
0.00
0.5
1 Actual Fre.
2 Motor AC
R
+
2)
PRG
SET
MF1
MF2
ESC
STOP/RESET
FWD
134
7N4
Tipologia corrente
Modello
Potenza (kW)
F
5.5
Monofase
220v
G
5.5
Trifase
220v
Trifase
380v
M
4
H
2.2
F
5.5
G
5.5
M
4
H
2.2
F
7.5~11
G
7.5
M
7.5
H
5.5~7.5
DIGITAL PANEL
FWD
REV
ALARM
+
Hz
-
V
%
s
°C
-
A
EN TER
S00 Set Fre.
0.00
0.5
1 Actual Fre.
2 Motor AC
+
3)
PRG
SET
FWD
MF1
MF2
ESC
STOP/RESET
135
7-3-3 Dimensioni tastierino
Immagine dimensioni JP6C8000
Immagine dimensioni JP6E8000
136
Immagine dimensioni JP6D8000
I pannelli installati sulla posizione della
tastiera, le dimensioni del foro necessario a
prescrivere:(75.5±0.1)*(122.5±0.1)
137
CAPITOLO 8: PEVISIONE E MANUTENZIONE
8-1 Revisione e manutezione
In condizioni di lavoro normale, oltre alla revisione giornaliera, il convertitore di
frequenza viene sottoposto a revisioni regolari (come la riparazione della macchina se
necessaria o il controllo ogni 6 mesi).
Fare riferimento alla seguente tabella per prevenire il verificarsi degli errori.
Tempo
revisione
Giorn
aliero
Regol
are
Component
e in
revisione
Element
o
sottoposto
a revisione
Da sottoporre a
revisione
Modalità
revisione
Criteri
Controllo
visivo
Conferma
in base
allo stato
durante
l’utilizzo
Display
Display
LED/OLED
In caso di
visualizzazione
anormale
Sistema di
raffreddam
ento
Ventilatore
In caso di rumori
o vibrazioni
anormali
Controllo
visivo e
audio
Nessuna
anormalità
√
Corpo
Condizioni
ambiente
circostante
Temperatura,
umidità, polvere,
gas nocivi e così
via..
Controllo
visivo,
audio e
olfattivo
In base
alla
sezione
2.1
√
Morsetti di
input e
output
Frequenza
In caso di
anormalità in
entrata e/o in
uscita
Misurare i
morsetti R,
S, T, U, V,
W.
In base
alle
specifiche
degli
standard
Condizioni
generali
Nel caso
l’accelerazione si
attenui, ci siano
segnali di
surriscaldamento,
scaricamento,
eccessiva polvere
o le pompe d’aria
siano bloccate.
Verificare
visivament
e, stringere
e pulire le
parti
interessate
Nessuna
condizion
e
anormale
Capacità
elettrolitica
Nel caso di
anormalità
Verificare
visivament
e
Nessuna
condizion
e
anormale
√
√
√
√
Circuito
principale
138
Fili elettrici
Morsetti
Nessuna
condizion
e
anormale
Nel caso di
componenti
allentate
Nel caso di viti o
bulloni allentati
Stringere
viti e
bulloni
Nessuna
condizion
e
anormale
Il simbolo “√”indica revisione giornaliera o revisione regolare
Durante le operazioni di revisione, non smontare o svitare i componenti a
piacimento e, soprattutto, non smontare senza ragione componenti integrate. In caso
contrario, l’unità non funzionerà normalmente, o potrebbe non entrare la modalità fault
del tastierino, si potrebbero verificare degli errori nei componenti o parti principali
dell’interruttore IGBT potrebbero essere danneggiate.
In caso di misurazione necessaria, è importante che l’utente tenga presente che
sono possibili risultati differenti a seconda degli strumenti adoperati durante il processo
di misurazione. È consigliabile misurare la tensione in entranta mediante il puntatore
voltmetro, la tensione in uscita mediante il voltmetro raddrizzatore, la corrente in entrata
e in uscita mediante la pinza amperometrica, e l'energia elettrica mediante il wattmetro.
8-2 Componenti che richiedono una sostituzione regolare nel tempo
Per garantire l’affidabilità operativa del convertitore di frequenza, oltre alle
regolari operazioni di manutenzione e revisione, tutte le componenti che possono essere
soggette all’usura meccanica devono essere sostituite a intervalli regolari; come le
ventole di raffreddamento, i filtri condensatori del circuito principale per l’accumulo e
lo scambio di energia e altre componenti PCB. In condizioni di lavoro regolari, queste
componenti dovrebbero essere sostituite secondo la seguente tabella, è tuttavia
necessario considerare anche le condizioni ambientali, i carichi e lo stato attuale del
convertitore di frequenza.
Nome componente
Intervallo di sostituzione
Ventole di raffreddamento
1~3 anni
Filtro condensatore
4~5 anni
PCB (pointed circuit board
5~8 anni
139
8-3 Conservazione e custodia
È necessario intraprendere le azioni che seguono nel caso in cui il convertitore di
frequenza non venga usato immediatamente dopo la consegna e l’utente desidera
conservarlo e mantenerlo in buone condizioni per lungo tempo.
※ Conservare in un ambiente asciutto e adeguatamente ventilato, lontano
da polvere e polveri metalliche, alla temperatura indicata nella sezione
relativa alle specifiche.
※ Nel caso in cui il convertitore di frequenza non venga utilizzato per più
di un anno, è necessario effettuare un test di carica per verificare le
prestazioni dei filtri condensatori del circuito principale. Durante la
carica, è consigliabile usare il regolatore di tensione per aumentare
lentamente la tensione in entrata nel convertitore di frequenza, finché la
carica e la tensione nominale durano più di 1~2 ore. È necessario
effettuare questo test almeno una volta all’anno.
※ La prova di pressione non può essere effettuata arbitrariamente, perchè
questo causerebbe dei guasti al convertitore di frequenza. Il test di
isolamento può essere effettuato dopo aver misurato la resistenza
dell'isolamento con 500 volt megaoh e questo valore non deve essere
meno di 4MΩ.
8-4 Misurazione e risultato
※
※
Se le corrente viene misurata con gli strumenti generali, potrebbe verificarsi
uno sbilanciamento della corrente nel morsetto di entrata. Una differenza
inferiore al 10% è considerata normale. Una differenza fino al 30%, informa
l'azienda di sostituire il raddrizzatore originale ponte di ricambio, o di
verificare eventuali errori se la tensione in ingresso trifase è superiore a 5V.
Se la tensione in ingresso trifase viene misurata con multimetro, il risultato
non sarà del tutto corretto perchè influenzato da interferenze della frequenza
portante, quindi, questa misurazione può essere considerata solo come
riferimento.
140
CAPITOLO 9: OPZIONI
Le serie di prodotti a seconda delle condizioni di uso e delle necessità dell’utente,
possono acquisire periferiche differenti. Vedere il seguente diagramma relativo alle
differenti connessioni:
141
9-1. MCCB o ELCB
MCCB o ELCB possono essere utilizzati come interruttori di alimentazione del
convertitore di frequenza e hanno un ruolo di protezione durante la fornitura di corrente
elettrica. Prestare attenzione a non usare MCCB o ELCB con funzione di controllo
durante l’arresto del convertitore di frequenza.
9-2. Reattore AC
Il reattore AC è in grado di controllare ed eseguire la messa a punto delle entrate di
corrente particolarmente elevate nel convertitore, apportando un significativo
miglioramento al fattore potenza del convertitore di frequenza. È consigliabile utilizzare
il reattore AC nelle seguenti circostanze:
※
※
※
La capacità di corrente estena utilizzata dal convertitore è 10 volte superiore alla
capacità del convertitore.
Connesse alla medesima fonte di alimentazione elettrica la carica SRC o il fattore
potenza vengono compensati mediante il comando ON/OFF.
Squilibrio piuttosto accentuato durante la tesione trifase (≥3%)。
Misure comuni relative al reattore AC:
Dimensioni:
Specifiche tecniche
convertitore
Peso
(kg)
Dimensioni (mm)
tesione
Capacità
(kW)
A
B
C
D
E
F
200V
230V
0.75
155
125
95
7
89
60
3.0
1.5
155
125
95
7
89
60
3.0
2.2
155
125
95
7
89
60
3.0
4
155
125
95
7
89
60
3.5
5.5
155
125
100
7
89
60
3.5
142
380V
460V
7.5
155
125
112
7
89
70
4.0
11
155
125
112
7
89
70
6.0
15
180
140
112
8
90
80
8.0
18.5
180
140
112
8
90
90
8.0
22
180
140
112
8
90
90
8.0
30
230
175
122
10
160
90
12.0
37
230
175
132
10
160
100
15.0
45
230
175
150
10
160
110
23.0
55
230
175
160
10
160
120
23.0
75
285
220
230
14
180
130
30.0
0.75
155
125
95
7
89
60
3.0
1.5
155
125
95
7
89
60
3.0
2.2
155
125
95
7
89
60
3.0
4
155
125
95
7
89
60
3.5
5.5
155
125
100
7
89
60
3.5
7.5
155
125
112
7
89
70
4.0
11
155
125
112
7
89
70
6.0
15
180
140
112
8
90
80
8.0
18.5
180
140
112
8
90
90
8.0
22
180
140
112
8
90
90
8.0
30
230
175
122
10
160
90
12.0
37
230
175
132
10
160
100
15.0
45
230
175
150
10
160
110
23.0
55
230
175
160
10
160
120
23.0
75
285
220
230
14
180
130
30.0
110
285
250
230
14
210
140
33.0
160
360
260
230
14
210
140
40.0
200
360
270
230
14
210
140
45.0
250
400
330
240
14
240
140
55.0
315
400
350
285
14
270
160
90.0
143
9- 3. Noise filter (filtro rumori)
Il filtro viene utilizzato per eliminare i rumori derivanti dalle interferenze delle
onde elettromagnetiche prodotte dal convertitore di frequenza, è inoltre in grado di
inibire le onde radio esterne e possibili vibrazioni della macchina.
Prima dell’utilizzo assicurarsi che l’alimentatore sia trifase a 3 fili, trifase a 4 fili,
nel caso di monofase assicurarsi che i fili di terra siano quanto più corti possibile e che i
filtri siano posizionati vicino al convertitore. Le dimensioni comuni del filtro rumori
EMI dovrebbero essere come di seguito.
È necessario scegliere un filtro di rumore EMI nel caso di utilizzo del convertitore
in aree commerciali, residenziali, scientifiche e così via.
Per impedire intereferenze magnetiche, assicurarsi che il convertitore sia adeguato
agli standard CE, UL e CSA.
Nel caso sia necessario l’acquisto del filtro, contattare l’azienda.
9- 4 Connettore
In funzione di protezione del sistema, è in grado di interrompere l’alimentazione, per
evitare il diffondersi dell’errore. Non può essere utilizzato con funzioni di controllo
durante l’arresto del motore.
9-5 Resistenza di frenata e resistore di frenata
A seconda del modello di freno, esiste un resistore all’interno del convertitore, la
cui coppia di resistenza massima è pari al 50%. É consigliabile scegliere il resistore di
frenata in base alla seguente tabella:
Modello
i
220V
380V
Potenza
i
(kW)
0.75
Valore resistenza
f 200
(Ω)
1.5
2.2
4
5.5
7.5
11
15
18
22
0.75
1.5
2.2
4
5.5
100
70
40
30
20
13.6
10
8
6.8
750
400
250
150
100
144
i
Potenza
120 f
300
300
500
500
780
2000
3000
4000
4500
120
300
300
500
500
7.5
11
15
75
50
40
780
1000
1500
Nel caso siano necessarie più coppie di frenatura oltre a quelle incorporate, è
consigliabile scegliere un resistore di frenatura RIMOR. Per informazioni più dettagliate,
consultare la relativa sessione nel manuale dell'utente.
Gli altri modelli di convertitori di frequenza ad alta potenza non contengono le
unità freno incorporate. È consigliabile scegliere un resistore di frenatura RIMOR in
caso di necessità.
9-6 Filtro di uscita EMI
Utilizzato per eliminare i rumori e le interferenze derivanti da perdite di corrente.
9-7 Reattore output AC
Quando i fili cablati del convertitore sono più lunghi di 20 metri, è possibile
attenuare le problematiche di sovracorrente causate dalla corrente di disturbo e dai
convertitori senza fili.
CAPITOLO 10: CONDIZIONI GENERALI DI VENDITA
I) GARANZIA
a) Rimor garantisce la buona qualità dei prodotti forniti e si impegna, nel periodo di
garanzia più avanti specificato, a sostituire gratuitamente o a riparare, a proprio
insindacabile giudizio, i componenti difettosi, nel più breve tempo possibile. Non sono
coperti da garanzia i danni derivanti da normale usura dei componenti o per imperizia o
errato uso da parte dell’utilizzatore.
b) Rimor si riserva di comunicare al Committente ove inviare in porto franco il
materiale difettoso, se presso il proprio magazzino, presso Officina di fiducia o presso il
Costruttore.
c) la garanzia è prestata per merce resa franco all’indirizzo da noi indicato e viene
rispedita con spese di spedizione a carico del Committente.
d) Salvo diversa precisazione scritta e accettata dal Cliente in sede di ordine, la garanzia
viene prestata per 12 mesi dalla data di spedizione e cessa allo scadere degli stessi anche
se il materiale non è stato montato o messo in servizio.
e) la garanzia decadrà se il prodotto è stato in alcun modo manomesso o se vi sono segni
evidenti di danni provocati per incuria o per errato utilizzo. Ogni prodotto è
accompagnato dal proprio manuale di uso e manutenzione cui il Cliente deve
strettamente attenersi, pena la decadenza della garanzia.
f) qualora il Cliente non sia in regola con i pagamenti, la garanzia non potrà essere
riconosciuta anche se formalmente dovuta.
145
g) qualunque reclamo, pena la nullità dello stesso, deve essere inviato per iscritto nei
termini di Legge e non dà comunque al Cliente il dirittto di sopsendere i pagamenti
II) RESPONSABILITA’
a) nulla sarà dovuto da Rimor al Committente sia a seguito del guasto che durante il
tempo necessario alla riparazione/ripristino del prodotto guasto, in qualità di
risarcimento o indennizzo per mancata produzione, perdite, spese o danni a qualsiasi
titolo diretti o indiretti. A carico della Rimor saranno in ogni caso i soli oneri relativi
alla riparazione o sostituzione del prodotto guasto, secondo le modalità indicate ai
paragrafi precedenti.
III) RISERVA DI PROPRIETA’
Rimor conserva la proprietà sui prodotti forniti fino al totale pagamento degli stessi.
IV) ACCETTAZIONE ORDINI
la Rimor si riserva la facoltà di dare seguito agli ordini del Committente in funzione
della situazione patrimoniale dello stesso. In particolare in caso di inadempienze sui
pagamenti o di evidenti problemi di solvibilità Rimor può non dare corso ad ordini
anche se è stata fatta regolare conferma o se esiste una convenzione con il Committente
V) VALIDITA’ OFFERTE
se non diversamente precisato le offerta sono da considerarsi valide per un mese dalla
emissione. Nel caso di prezzi convenzionati, eventuali variazioni prezzi andranno
comunicate da Rimor con il preavviso di un mese
VI) CONSEGNE
le consegne sono date per merce resa al nostro magazzino pronte per la spedizione
Rimor non accetta alcuna penale su ritardata consegna a nessun titolo, qualunque sia il
motivo del ritardo.
VII) TRASPORTI
Ad ogni effetto anche di Legge la merce si ritiene accettata ( e consegnata) all’uscita
dalla nostra Sede o magazzini perifierici. La merce viaggia sempre a rischio e pericolo
dell’Acquirente.
VIII) RESI
Non si accettano resi di materiale se non precedentemente autorizzati dall nostra Società
IX) PAGAMENTI
Le scadenze di pagamento sono pattuite in sede di ordine e vanno tassativamente
rispettate dal Cliente.
Se non diversamente pattuito per iscritto valgono le scadenze stabilite dal Decreto
Legislativo 231/02 in vigore dal 07/11/02.
Eventuali ritardi sui termini di pagamento saranno regolati secondo il Decreto
Legislativo 231/02.
Qualunque contestazione sul prodotto o reclamo, anche se riconosciuto in garanzia, non
dà dirittto al Cliente di sospendere i pagamenti.
X) CONTROVERSIE
a) i contratti anche se stipulati con cittadini o soggetti esteri, o per materiali forniti
all’estero, sono regolati dalla vigente legislazione Italiana.
b) Il Foro competente è Torino
c) le eventuali contestazioni non dispensano il Committente dal fare fronte agli impegni
di pagamento pattuiti e non danno titolo ad alcun prolungamento del termine convenuto.
146
d) le spese di contratto, la sua registrazione e l’eventuale trascrizione della riserva di
proprietà sono a carico del Committente
147
Appendica 1 Protocollo di comunicazione linea seriale RS485
1. Introduzione all’utilizzo
Questo capitolo presenta una serie di informazioni relative all'installazione e alle
operazioni di comunicazione della linea seriale RS485 all’interno del convertitore di
frequenza o di macchine quali PLC, PC e FA.
z
È in grado di comunicare con tutti i computer
z
Utilizzando l’opzione (multi-drop link system), è possibile collegare più di 127
convertitori di frequenza.
z
Completamente isolata e dotata di scudo contro i rumori
z
È possibile utilizzare qualsiasi tipo di modello di trasformatore RS232-485, a
condizione che il trasformatore sia dotato della funzione "controllo RTS
automatico”.
2 Specifiche
Funzioni comunicazione
Elemento
Specifica
Comunicazione baud rate
È possibile selezionare bps 38400/19200/9600/4800/2400/1200
Protocollo di supporto
Protocollo Modbus, formato RTU
Modalità interfaccia
Modalità comunicazione asincrona, semi-duplex, primo byte alto,
byte basso nel successivo, avvio a basso byte efficace.
1 bit di avvio, 8 bit dati, 1 bit di stop, nessun bit di parità
1 bit di avvio, 8 bit dati, 1 bit di stop, bit di parità
Formato dati
1 bit di avvio, 8 bit dati, 1 bit di stop, bit disparità
1 bit di avvio, 8 bit dati, 2 bit di stop, nessun bit di parità
1 bit di avvio, 8 bit dati, 2 bit di stop, bit di parità
1 bit di avvio, 8 bit dati, 2 bit di stop, bit disparità
È possibile impostare l’indirizzo slave su 1~127
Indirizzo slave
L’indirizzo broadcast su 0, l’indirizzo host per la proporzione di
connessione su 128.
Comunicazione
convertitore mediante
Morsetti SG+,SG-, scudo SH, default 19200bps
porta A
Comunicazione
convertitore mediante
RJ45,cavo schermato 8, fisso 19200bps, nessun bit di parità
porta B
3 Connessione di comunicazione
3-1 Connessione della comunicazione mediante la porta A
148
z
Collegare i cavi di comunicazione della linea seriale RS485 ai morsetti di
controllo (SG+),(SG-) del convertitore.
z
Nel caso si stia utilizzando un trasformatore RS232-485, confermare il
collegamento del convertitore SG+" al corrispettivo della linea seriale RS485
"T+" e il convertitore "SG-" al corrispettivo della linea seriale RS485 "T-".
z
Dopo aver confermato il collegamento ancora una volta, accendere il convertitore.
z
Se il collegamento è corretto, impostare i parametri di comunicazione come di
seguito:
z
A26 velocità di trasmissione: 0:1200,1:2400,2:4800,3:9600,4:
19200,5:38400
z
A27 indirizzo di comunicazione del convertitore 1~127 (se si stanno utilizzando
più convertitori, non utilizzare lo stesso numero)
z
Quando si utilizza la modalità controllo esecuzione della linea seriale RS485, è
necessario impostare F04=0/1/2 selezionando modalità controllo esecuzione linea
seriale RS485.
TX
RX
GND
Freni
120欧 1/4W
T+
RS485
Converter T-
SG- SG+
1#
PC
SG- SG+
2#
SG- SG+
……
Convertitore Convertitore
di frequenza di frequenza
N#
Convertitore
di frequenza
3-2 Definizione connessione comunicazione porta B
Perno
comunicazione
1
2
3
4
5
6
7
8
GND
+5V
485+
485
-
485+
485-
+5V
GND
EIA/TIA T568A
Bianco
verde
verde
Bianco
arancio
ne
blu
Bianc
o blu
arancio
ne
Bianco
marro
ne
marron
e
EIA/TIA T568B
Bianco
aracione
arancio
ne
Bianco
verde
blu
Bianc
o blu
verde
Bianco
marro
ne
Marron
e
Porta B
Segnale
comunicazione
Porta B
149
3-3 Sicurezza e affidabilità dei dati
z
È possibile collegarsi a non più di 127 convertitori.
z
Sebbene la lunghezza dei cavi di comunicazione può arrivare fino a 1300 m, per
ragioni di stabilità della comunicazione, è consigliabile l’utilizzo di cavi non più
lunghi di 800 m.
z
Tutti i cavi di segnali di controllo usano i cavi scudati, che sono collegati alla linea
serialeRS485 mediante il morsetto del segnale “SH”.
z
Per garantire l’affidabilità dei dati, il pacchetto dati utilizza la modalità rilevazione
frame CRC, rilevazione verticale della longitudine.
z
Modulo comunicazione LINEA SERIALE RS485 completamente isolate per
assicurare una comunicazione affidabile, supporto hot-swappable, è possibile
iniziare a lavorare dopo aver effettuato l'accesso modulare.
z
Il sistema viene testato mediante 6 diverse tipologie di velocità di trasmissione:
0:1200,1:2400,2:4800,3:9600 ,4:19200,5:38400
In ogni caso, in condizioni ambientali non ideali, diminuire la velocità di
trasmissione può migliorare la qualità della comunicazione.
z
L’intervallo di tempo di invio tra frame è maggiore di 50ms.
4 Protocollo comunicazione
Nella struttura di comunicazione il convertitore rappresenta lo slave e il coputer
l’host.
4-1 Descrizione del formato base
1: frame di avvio
Intervallo >2ms
4-2 Indirizzo slave
Dall’indirizzo locale della macchina, mediante l’impostazione del parametro A27, è
possibile avere un solo e unico indirizzo locale di rete.
Impostare l'intervallo 1~127.
L’ID 00H=0 è un indirizzo mail broadcast, mentre 128~255 è un indirizzo
riservato.
4-3 codice funzione
I comandi che l’host invia, sono la risposta della macchina al comando.
150
z
Categorie codice funzione
0x02= Ottenere record relativo al malfuzionamento della macchina
Risposta host
SOF
Intervallo >2ms
Indirizzo
Codice
Indirizzo
Checksum
slave
funzione
registrato
CRC
1 bytes
posizione idle
1 bytes
2 bytes
2 bytes
Indirizzo termine
frame
Intervallo >2ms
posizione idle
Risposta slave
SOF
Intervallo >2ms
posizione idle
Indirizzo
Codice
Dati
Checksum
Indirizzo termine
slave.
funzione
registrati
CRC
frame
1 bytes
1 bytes
2 bytes
2 bytes
Intervallo >2ms
posizione idle
0x03=Ottenere registro unico della macchina
Risposta host
SOF
Intervallo >2ms
Indirizzo
Codice
Indirizzo
Checksum
slave.
funzione
registrato
CRC
1 bytes
posizione idle
1 bytes
2 bytes
2 bytes
Indirizzo termine
frame
Intervallo >2ms
posizione idle
Risposta slave
SOF
Intervallo >2ms
Indirizzo
Codice
Dati
Checksum
slave
funzione
registrati
CRC
1 bytes
posizione idle
1 bytes
2 bytes
2 bytes
Indirizzo termine
frame
Intervallo >2ms
posizione idle
0x13= Ottenere più registri della macchina
Comando host
SOF
Intervallo >2ms
posizione idle
Indirizzo Codice
slave.
1 bytes
funzione
1 bytes
Numero di
Indirizzo di
…
registrazion registrazione
e
1
1 bytes
Indirizzo di
registrazione
n
…
2 bytes
2 bytes
Checksum
Indirizzo
CRC
termine frame
2 bytes
Intervallo >2ms
posizione idle
Risposta slave
SOF
Intervallo >2ms
posizione idle
Indirizzo
Codice
slave.
funzione
1 bytes
1 bytes
Numero di
Dati
…
registrazione registrati
1
1 bytes
2 bytes
Dati di
registrazione
n
…
2 bytes
Checksu
Indirizzo termine
m CRC
frame
2 bytes
Intervallo >2ms
posizione idle
0x06= Inserire registro singolo slave (no salvataggio automatico in caso di powerdown)
0x26= Inserire registro singolo slave (salvataggio automatico in caso di powerdown)
151
Comando host
SOF
Intervallo >2ms
posizione idle
Indirizzo
Codice
Indirizzo di
Dati di
Checksum
Indirizzo
slave
funzione
registrazione
registrazione
CRC
termine frame
1 bytes
1 bytes
2 bytes
2 bytes
2 bytes
Intervallo >2ms
posizione idle
Risposta slave
SOF
Indirizzo
Codice
Indirizzo
Dati
Checksu
Indirizzo
slave
funzione
registrato
registrati
m CRC
termine frame
1 bytes
1 bytes
2 bytes
2 bytes
2 bytes
Intervallo
>2ms
posizione idle
Intervallo >2ms
posizione idle
0x16=Inserire multi registro slave (no salvataggio automatico in caso di powerdown)
0x36=Inserire multi registro slave (salvataggio automatico in caso di power-down)
Comando host
Numer Indirizzo
Indirizzo Codice
SOF
slave
funzione
o di
di
…
Dati di
Indirizo di
registra registrazi registrazi
zione
one
Dati di
registrazion registrazion
e
one1
e
n
Checksu
m CRC
Indirizzo
termine
frame
1
Intervallo
>2ms
1 bytes
1 bytes
1 bytes
…
2 bytes
2 bytes
Intervallo
2 bytes
2 bytes
2 bytes
posizione idle
>2ms
posizione idle
Risposta slave
SOF
Intervallo >2ms
posizione idle
Indirizzo
Codice
Numero di
Checksum
slave.
funzione
registrazione
CRC
1 bytes
1 bytes
1 bytes
2 bytes
Indirizzo termine
frame
Intervallo >2ms
posizione idle
Se la macchina risponde con i seguenti codici funzione, si sono verificate
anormalità nella comunicazione.
0xA0=operazione non valida, impostazione non valida in questo stato
0xA1= codice funzione non valido
0xA2= Il rapporto errori è vuoto
0xA3=indirizzo registro non valido
0xA4= slave occupato, ritardo EEPROM.
0xA5= diritti amministratore limitati
0xA6= valore impostato supera i limiti
0xA7= errore checksum CRC
0xA8= errore formato frame
152
4-4 indirizzo registro
L'indirizzo registro è composto da 2 byte, così come l’impostazione dati.
Codice
funzione
Indirizzo regisrtrazione byte alti
Gruppo parametri
0x03/0x13
(lettura
codice
parametri
funzioni
macchina
slave)
Indirizzo registrazione byte bassi
Numero di serie valore parametro
F
0x00
A
0x01
0~63
0~63
o
0x02
0~71
H
0x03
0~55
U
0x04
0~15
P
0x05
0~15
E
0x06
0~23
C
0x07
0~47
b
0x08
0~23
y
0x09
0~23
L
0x0A
0~31
S
0x0B
0~15
0x00
R
0x06/0x16
(impostazione
codice
funzione
parametri
macchina
slave sulla
RAM)
0x26/0x36
(impostazione
codice
funzione
parametri
macchina
slave sulla
EEPROM)
0x02
(lettura
0x10
Stato in esecuzione NOTA 2
0x01
Stato riservato 1
0x02
Stato riservato 2
0x03
Stato riservato 3
F
Dati byte
alto
0x00
A
0x01
0~63
o
0x02
0~71
H
0x03
0~55
U
0x04
0~15
P
0x05
0~15
E
0x06
0~23
C
0x07
0~47
b
0x08
0~23
y
0x09
0~23
L
0x0A
Gruppo parametri
Dati byte basso
0~63
0~31
0x00
R
Rapporto errori
0x10
Dati
153
Comando esecuzioen NOTA3
0x01
Comando riservato 1
0x02
Comando riservato 2
0x03
Comando riservato 3
Contenuti guasto
Dati
esaminati
rapporto
errori)
Rapporto errori 1
0x00
Rapporto errori 2
0x01
Rapporto errori 3
0x02
Rapporto errori 4
0x03
Rapporto errori 4
0x04
Tipo errore NOTA 4
Errrore frequenza
d’uscita
Errore corrente d’uscita
Errore tensione d’uscita
Errore stato di
esecuzione
0x00
0x01
0x02
0x03
0x04
NOTE 1:
01H lettura operazione
02H scrittura operazione
Torna a 0
Operazione non valida
Ritorna a 0
Operazione non valida
Operazione valida
Operazione non valida
y00 Ripristino valori
di fabbricazione
y01 parametri
tastierino
y02 Rapporto errori
più recenti
y03~y07
rapporto errori
Rapporto vuoto
00H
Nuovo rapporto
01H
Conferma rapporto
02H
y08
Reset rapporto errori
y09 corrente
nominale di uscita
y10 tensione
nominale di uscita
Ritorna a 0
Operazione non valida
Operazione valida
Operazione non valida
Operazione valida
Operazione non valida
80
y11 serie prodotti
Operazione non valida
0
Codice
Serie
famiglia
prodotti
3
Livello
tensione di
Operazione non valida
ingresso
Numenro dopo la conversione decimale
y 12 versione del
software
y13 data anno
prodotto
y14 data mese
giorno prodotto
y15 inserimento
decodifica utente
y16 inserimento
password utente
y17 protezione
gruppo parametri
Operazione valida
Operazione non valida
Operazione valida
Operazione non valida
Operazione valida
Operazione non valida
Operazione valida
Operazione non valida
Operazione valida
Operazione non valida
Operazione valida
Operazione valida
NOTE 2:
bit
Definizi
one
15 BIT
14 BIT
13 BIT
12 BIT
O: nessun errore
O: nessun errore
O: nessun errore
0: errore confermato
1: arresto di
1: arresto di
1: arresto di
1: errore verificato, ma
154
bit
emergenza per
emergenza per
emergenza per
errore
errore
errore
11 BIT
10 BIT、
non confermato
9 BIT
8 BIT
0: nessuna esecuzione
Definizi
one
bit
definizi
one
bit
definizi
one
Riservato
Riservato
7 BIT
0: Bassa
frequenza non
raggiunta
1: bassa
frequenza
raggiunta
3 BIT
6 BIT
0: Bassa
frequenza non
raggiunta
1: bassa
frequenza
raggiunta
2 BIT
0: stato
esecuzione in
inversione
1: stato
esecuzione in
avanzamento
Riservato
Riservato
jog
1: esecuzione jog
5 BIT 、 4 BIT
00:arresto
01:accelerazione esecuzione
10:decelerazione esecuzione
11:esecuzione velocità costante
155
1 BIT
0 BIT
Riservato
0:V/F modalità
controllo
1:SV modalità
controllo
NOTE 3:
bit
15 BIT
14 BIT
conte
nuto
Riservato
bit
11 BIT
10 BIT
conte
nuto
Riservato
Riservato
7 BIT
0: nessun arresto
libero
1: comando
arresto libero
3 BIT
6 BIT
bit
conte
nuto
bit
conte
nuto
Riservato
Riservato
13 BIT
12 BIT
Riservato
Riservato
9 BIT
8 BIT
Riservato
Riservato
2 BIT
0: comando di
inversione
1: comando di
avanzamento
5 BIT
0:JOG commando
arresto
1:JOG commando
esecuzione
1 BIT
Riservato
Riservato
4 BIT
Riservato
0 BIT
0: comando di
arresto
1: comando di
esecuzione
NOTA 4: Codice tipo errore
Numero
Display LED
Informazioni errore
0
E.OCP
Il sistema ha subito delle interferenze o degli shock transitori
di sovracorrente
1
E.OCC
Segnale sovracorrente proveniente da circuito misurazione
corrente
2
E.OCF
Segnale sovracorrente proveniente dall’unità circuito
3
E.OU
Sovratensione
4
E.LU
Sottotensione
5
E.OL
Sovracarico
6
E.UL
Airbone early warning light
7
E.PHI
Ingresso alimentazione di fase
8
E.EEP
Errore EEPROM
9
E.ntC
Sovrariscaldamento
10
E.dAt
Superamento limiti di utilizzo
11
E.Set
Errore esterno
12
E.PId
Errore regolazione PID
13
E.OHt
Errore sovrariscaldamento motore
14
E.OL2
Errore sovracarico motore
15
E.PG
Errore PG
16
E.PHo
Convertitore in fase di uscita
156
17
E.COA
Errore comunicazione linea seriale RS485 e porta A
18
E.COb
Errore comunicazione linea seriale RS485 porta B
19
E.CAL
Errore identificazione parametro
4-5 checksum CRC
Contenuto dati: checksum CRC frame dei dati, utilizzando 2 byte
Checksum= checksum CRC di tutti i dati compresi in un frame
In normali condizioni di comunicazione e di impostazione valida, i comandi
dell’host e le risposte dello slave devono essere come le seguenti:
Comandi host
Avvio frame
Intervallo >2 bit
posizione idle
Indirizzo
Codice
Indirizzo
Dati
slave.
comando host
registro
impostazione
CRC
0x1388
0xD5C5
0x08
0x0001
0x06
Checksum
Risposta slave
Avvio frame
Intervallo >2 bit
posizione idle
Indirizzo
Codice
Indirizzo
Dati
Checksum
slave.
comando host
registro
impostazione
CRC
0x1388
0xD5C5
0x08
0x06
157
0x0001
5 Esempi di protocollo di comunicazione
unsigned int cal_crc16 (unsigned char *data, unsigned int length)
{
unsigned int i,crc_result=0xffff;
while(length--)
{
crc_result^=*data++;
for(i=0;i<8;i++)
{
if(crc_result&0x01)
crc_result=(crc_result>>1)^0xa001;
else
crc_result=crc_result>>1;
}
}
crc_result=((crc_result&0xff)<<8)|(crc_result>>8);
return(crc_result);
158
Appendice 2: Istruzioni relative alla funzione di collegamento
proporzionale
1. Spiegazione funzione
Il collegamento proporzionale dell’host
Indirizzo della comunicazione =128,
Comunicazione mediante porta A, impostata come porta di comunicazione del
computer host.
Comunicazioe mediante porta B che viene impostata come interfaccia del tastierino, o
interfaccia del computer host.
Esiste solamente un convertitore host in un collegamento proporzionale.
Il convertitore host controlla lo stato di esecuzione, mentre il convertitore slave segue
lo stato di esecuzione del convertitore host.
Il collegamento proporzionale dello slave:
Indirizzo comunicazione = 1~127,
Entrambe le porte di comunicazione A e B possono essere impostate come le porte di
comunicazione dello slave durante il collegamento proporzionale.
Il convertitore slave segue l’esecuzione dell’host, ma allo stesso tempo, se necessario,
può mediante il morsetto o il tastierino forzare l'arresto della macchina.
Per eseguire la funzione di collegamento proporzionale, è necessario che il computer
host sia impostato sui seguenti parametri:
A28
Indirizzo comunicazione locale
128
Per eseguire la funzione di collegamento proporzionale, è necessario che il computer
slave sia impostato sui seguenti parametri
Frequenza impostata
Comando proveniente dal collegamento
F01
mediante tastierino/iinea
proporzionale host
seriale RS485
Frequenza impostata mediante
0
tastierino/linea seriale RS485
F02
F03
Modalità frequenza
principale data
Modalità di frequenza per
dato ausiliare
AI1 analogia esterna data
1
AI2 analogia esterna data
2
AI3 analogia esterna data
3
Potenziometro su tastierino dato
4
Tensione digitale multisegmento data
5
Pulsione digitale data
6
Frequenza impostata mediante
tastierino/linea seriale RS485
0
AI1 analogia esterna data
1
AI2 analogia esterna data
2
AI3 analogia esterna data
3
Potenziomentro su tastierino dato
4
Tensione digitale multisegmento data
5
Pulsione digitale data
6
159
Modalità regolazione PID
Controllo indipendente impostazioni
principali
Controllo indipendente impostazioni
ausiliari
F04
Relazione tra frequenza
principale e frequenza
ausiliare
F05
0
1
Principale + ausiliare
2
Principale - ausiliare
3
Principale × ausiliare
4
Frequenza massima {principale,
ausiliare}
Frequenza minima {principale,
ausiliare}
Modalità controllo
esecuzione
7
Controllo collegamento proporzionale
5
6
4
Selezionando questa funzione, il convertitore slave seguirà i comandi del
convertitore host per effettuare l'esecuzione.
Dopo aver selezionato questa funzione, sarà possibile utilizzare il
tastierino, i morsetto, la linea seriale RS485 per effettuare il controllo del
collegamento proporzionale quando il convertitore slave è in esecuzione.
Durante il processo di esecuzione del collegamento proporzionale, il
controllo del collegamento stesso viene eseguito mediante il tastierino, i
morsetti, la linea seriale RS485 e così via, dopo che il convertitore slave ha
effettuato l'arresto; lo slave non avrà alcuna influenza sui comandi di
esecuzione dell’host per il collegamento proporzionale. Affinchè venga
ripristinata questa funzione, è necessario procedere all'esecuzione mediante il
tastierino, i morsetto e la linea seriale RS485, oppure dopo che il
collegamento proporzionale dell'host ha inviato il comando di arresto, lo slave
potrà di nuovo influenzare i comandi di esecuzione.
A28
Indirizzo comunicazione macchina locale
1~127
A29
Baud rate
Uguale a host
A30
Formato comunicazione
Uguale a host
A55
Fattori collegamento proporzionale
0.10~10.00
Durante il collegamento proporzionale, lo stato di esecuzione dello slave
o20/2
viene controllato
dall’host.
Collegamento proporzionale slave F01=fattore proporzionale x frequenza
reale impostata
0 dall’host del collegamento proporzionale
o02S00电压
(o01+o02)/2
Frequenzao01
reale impostata
da slave
del collegamento proporzionale =
slave collegamento proporzionale F01+ frequenza data modifica ausiliare + regolazione
aumento/diminuzione.
controllo-o20/2
2. Casi di funzioni collegamento proporzionale
Funzione reali del sistema di collegamento proporzionale
160
1)
il convertitore host mediante il potenziometro regola la velocità del
sistema e mediante l'utilizzo dei morsetti controlla l'esecuzione avanti e
indietro.
2)
il convertitore slave segue l’esecuzione del convertitore host, il fattore
del collegamento proporzionale
3)
il comando relativo alla velocità di esecuzione ricevuto dal convertitore
host viene archiviato in F01.
4)
il convertitore slave imposta la frequenza reale mediante il tastierino o
mediante la regolazione del controllo aumento/diminuzione effettuata
dal morsetto.
5)
il convertitore slave imposta la frequenza mediante la regolazione del
potenziometro.
6)
La frequenza reale impostata dal convertitore slave
Impostazione host collegamento proporzionale
F02
Modalità impostazione
frequenza principale data
AI1 analogia esterna data 11
A28
Indirizzo comuincazione
locale
Collegamento proporzionale host 128 11
A29
Baud rate
3:9600bps
A30
Formato comunicazione
0
o36
Selezione funzione morsetto
di entrata DI1
1: comando di avanzamento
o37
Selezione funzione morsetto
di entrata DI1
2: comando di inversione
Impostazioni slave collegamento proporzionale
F02
Modalità frequenza
principale data
Tastierino imposta la frequenza o
linea seriale RS485
0
F03
Modalità frequenza ausiliare
data
AI1 analogia esterna data
1
F04
Relazione frequenza
principale ausialiare data
Principale + ausiliare
2
F05
Modalità controllo
esecuzione
Controllo collegamento
proporzionale
4
A28
Indirizzo comunicazione
locale
1~127
A29
Baud rate
Come host
A30
Formato comunicazione
Come host
161
o36
o37
o38
Selezione funzione morsetto
di entrata DI1
Selezione funzione morsetto
di entrata DI2
Selezione funzione morsetto
di entrata DI3
37: arresto forzato
38: comando freccia in alto
39: comando freccia in basso
A43
Definizione pulsante
multifunzione MF1
8: il pulsante MF diventa il comando
freccia in alto
A44
Definizione pulsante
multifunzione MF2
9: il pulsante PF diventa il comando
freccia in basso
162
Immagine cavi sistema:
163
Appendice 3: Istruzioni relative all'utilizzo della scheda PG
1.
Campo di utilizzo VFR 1080 PG.V1 encoder line-driven 5V
Instruzioni relative alle funzione del morsetto
Morsetti
Funzione del morsetto
A+ A- , B+ B- , Z+ Z-
Segnale di ingresso encoder
+5V
Alimentazione encoder, 5V
GND
Ecoder a terra
Istruzioni cavi morsetto
Unità freni
R
S
T
DC+1
R(L1)
S(L2)
T(L3)
DC+2/B1
B2
U(T1)
V(T2)
W(T3)
M
3~
Z-
ZZ+
BB+
PI8000
PG Carta
AA+
+5V
GND
164
Z+
BB+
PG
AA+
+5V
V0
Appendice 4: ISTRUZIONI RELATIVE ALLA FUNZIONE DI ESTENSIONE
Numero
seriale
Funzione E00
1
alimentazione
speciale
Impostazione
parametro
Definizione
8
alimentaziona conversione di potenza
13
alimentazione a tensione stabile
14
alimentazione a corrente costante
Rifornimento
9
Rifornimento idrico
idrico
3
estrusore
15
estrusore
Si prega di rivolgersi al nostro supporto tecnico per informazioni sulle istruzioni relative
alla funzione di estensione non riportate.
2
1.Alimentazione speciale
1-1.Impostare E00 su 8: alimetazione a conversione di corrente
L'opzione P03 del segnale di impostazione del PID, può impostare la tensione
costante data mediante diverse modalità come tastierino, analogico AI1, a impulsi, ecc. .
Calolo tensione data:
Tensione data 220VAC
Valore di impostazione della frequenza data = 220 × 1.414/500 * 100% = 62,2%
Parametri specifici dell'alimentazione a conversione di corrente:
num
ero
impostazione
nome
gamma
unità
definizione
di fabbrica
seria
le
parametro
tempo di salita della
E16
0~9999
0
utente 1
tensione
parametro
0~9999
tenpo di caduta della
E17
0
utente 2
tensione
In modalità di alimentazione a tensione stabile, la frequenza di uscita e la
tensione in uscita sono regolabili.
La caduta della frequenza di uscita e la caduta del tempo possono essere regolati
con F09 e F10.
Il tempo di salita della tensione E16 definisce il tempo di salita della tensione di
uscita, 9999 pari a 999.9 secondi.
Il tempo di caduta della tensione E17 definisce il tempo di caduta della tensione
di uscita, 9999 pari a 999.9 secondi.
In aumento di tensione, il tempo di caduta può impostare il tempo di
accelerazione e decelerazione della tensione di impostazione di uscita solo in fase di
esecuzione.
Dopo l'esecuzione del comando di arresto, l'uscita si arresta dopo che il
165
controllore ha raggiunto 0Hz in base alla decelerazione della frequenza in uscita.
parametro
0~9999
massima tensione in
0
utente 3
uscita
Al fine di garantire le misure di sicurezza, assicurare la tensione di uscita
all'interno della gamma del carico sostenuto definendo della tensione di uscita
massima.
Ad esempio, 250VAC massima tensione di sistema.
Di conseguenza, la massima tensione di uscita = 250
E18 = 250
E18
1-2.Impostare E00 su 13: alimentazione a tensione stabile
In modalità AI2 e AI3 con accesso Hall, si effettua misurazione della tensione di
uscita, con due lavori ridondanti di Hall garantendo che la tensione di uscita non superi
il limite della tensione di Hall.
In modalità a tensione stabile, è necessario regolare i parametri come segue:
gruppo di funzioni PID , opzione PO2 del segnale di retroazione PID.
Rilevamento analogico AI2 e AI3 impostato come una configurazione ridondante,
assicura risultati sicuri e affidabili.
La tensione di retroazione 100% corrisponde alla tensione di rilevamento di Hall
500VAC, tensione di uscita di Hall 5V.
Impostare o03 = 50%, o05 = 50%.
L'opzione P03 del segnale di impostazione del PID, può impostare la tensione
costante data mediante diverse modalità come tastierino, analogico AI1, a impulsi, ecc. .
Calcolo tensione data:
Tensione data 220VAC
Con tensione data 220VAC, il valore di impostazione della tensione data = 220 ×
1.414/500 * 100% = 62,2%
Gli altri parametri del PID sono regolati in base alle condizioni del luogo.
In modalità di alimentazione a tensione stabile, il tempo di accelerazione e
decelerazione della tensione sono regolati dai parametri del PID e non dipendono dal
tempo di accelerazione e decelerazione della tensione.
Parametri specifici dell'alimentazione a tensione stabile:
num
ero
seria
le
nome
gamma
unit
à
definizione
impostazione
di fabbrica
parametro
tempo di salita della
0~9999
0
utente 1
tensione
parametro
0~9999
tempo di caduta della
E17
0
utente 2
tensione
In modalità di alimentazione a tensione stabile, la frequenza di uscita e la
tensione in uscita sono regolabili.
La caduta della frequenza di uscita e la caduta del tempo possono essere regolati con
F09, F10.
Il tempo di salita della tensione E16 definisce il tempo di salita della tensione di
E16
166
uscita, 9999 pari a 999.9 secondi.
Il tempo di caduta della tensione E17 definisce il tempo di caduta della tensione di
uscita, 9999 pari a 999.9 secondi.
In aumento di tensione, il tempo di caduta può impostare il tempo di accelerazione e
decelerazione della tensione di impostazione di uscita solo in fase di esecuzione.
Dopo l'esecuzione del comando di arresto, l'uscita si arresta dopo che il controllore ha
raggiunto 0Hz in base alla decelerazione della frequenza in uscita.
parametro
0~9999
massima tensione in
0
utente 3
uscita
Al fine di garantire sicurezza, assicurare la tensione di uscita all'interno della
gamma del carico sostenuto, necessita di una definizione della tensione di uscita
massima.
Ad esempio, 250VAC massima tensione di sistema.
Di conseguenza, la massima tensione di uscita=250×1.414/500*100%=70.7%
E18=707。
E18
2.Applicazione rifornimento idrico
2-1.Descrizione dei relativi parametri:
1、Tipi di carico con funzione di rifornimento idrico
para
metr
o
E00
display
tastierino
Tipo di carico
valore
impostat
o
9
definizione
impostando E12 come pompa singola, non
necessita di interfaccia di rifornimento idrico
Rifornimento idrico, necessita di rifornimento
idrico della scheda di interfaccia, al tempo
stesso si realizza la funzione di rifornimento
idrico con 4 pompe
2.2Campo di utilizzo
Il presente allegato riguarda le multipompe, ovvero i componenti del sistema
specializzati nell’approvigionamento idrico. È necessario che tali componenti vengano
usati con la serie di convertitori VFR 1081 al fine di realizzare un controllo efficace
delle multipompe.
2-3. Istruzione per l’uso e precauzioni per il cablaggio
◇
Quando si utilizza il driver del motore di frequenza, assicurarsi che il relè termico
sia installato correttamente al fine di proteggere il motore.
◇
Tra il lato di frequenza del motore e l’uscita del convertitore è necessario
utilizzare il blocco meccanico per il contattore AC e procedere al blocco logico
sul loop di controllo elettrico, per evitare che tra l’alimentatore di frequenza e
167
l’uscita del convertitore
l’apparecchiatura.
si
verifichi
un
cortocircuito
che
danneggi
◇
Tutte le sequenze di alimentazione della frequenza del motore devono essere
uguali alle frequenze di uscita del convertitore, per evitare danni inversi al motore,
confermare l'esecuzione dopo le procedure.
◇
Quando si procede al cablaggio del segnale di controllo del convertitore, staccare
tutti gli altri cavi di alimentazione tenendo presente che non è necessario collegare
tutti i cavi a uno stesso tubo di cablaggio, altrimenti si potrebbero verificare dei
malfunzionamenti.
◇
È necessario che il cavo del segnale di impostazione della tensione e il cavo del
segnale feedback della tensione utilizzino il cavo schermato.
3. Dimensioni
3-1 Immagini dimensioni del pannello di controllo di approvigionamento idrico del
convertitore
3-2 Immagine dimensione del controller di approvigionamento idrico del convertitore
168
Pannello fisso
Pannello fisso
Pannello fisso
×
Dimensioni pannello fisso
Spiegazione: l'immagine indica le tre diverse posizioni di installaizone del pannello
fisso, che possono essere scelte in base agli strumenti e alle necessità dell'utente.
169
4. Collegamento del convertitore di frequenza e del controller di
approvigionamento idrico del convertitore
4-1 È necessario installare il modulo di comunicazione linea seriale RS485 sul
pannello di controllo, di seguito si riporta lo schema relativo all'installazione del modulo
di comunicazione linea seriale RS485
7K-Linea seriale RS485_S Scheda di controllo 7KLCB
7K-LINEA SERIALE RS485_S Scheda di controllo 7KLCB
170
4-2 È necessario collegare i cavi dell’alimetanzione e i cavi della comunicazione tra il
controller di approvigionamento idrico del convertitore e il convertitore, per il
collegamento vedere lo schema di seguito:
171
5. Immagine cavi sistema
6. Modalità controllo approvigionamento idrico
Quando l'approvigionamento idrico è fornito da diverse pompe nello stesso
momento, la variazione del flusso d'acqua può essere notevole a causa di momenti
differenti, come giorno e notte, e stagioni differenti, come estate e inverno. Al fine di
risparmiare energia e di proteggere l’apparecchiatura, verrà utilizzato il principio
secondo il quale si apriranno quante più pompe possibile al momento necessario e si
useranno meno pompe possibile quando l'approvigionamento non sarà più necessario.
Il convertitore confermerà il numero delle pompe operative in base alla richiesta
del controllo loop chiuso della pressione. Nel campo impostazioni, il convertitore è in
grado di controllare solo una pompa alla volta.
Quando l’intervallo di tempo del tempo di rotazione è impostato tra 0.05~100.00
e il relativo tempo di esecuzione è stabile, il convertitore in base al principio di
addizione o sottrazione assicura che ogni pompa abbia la possibilità di essere messa in
esecuzione, per prevenire la comparsa di ruggine dovuta al disuso per lungo tempo.
Quando viene raggiunto il livello massimo e il livello minimo delle pompe e viene
raggiunto il tempo di apertura e chiusura delle pompe, il convertitore aumenterà o
diminuirà le pompe in base al principio di addizione e sottrazione delle pompe stesse,
172
per assicurare l'esecuzione di tutte le pompe ed evitare l'insorgere della ruggine dovuta
al disuso per lungo tempo.
7. Nota relativa all’utilizzo dell’approvigionamento idrico
Applicazioni tecniche: quattro pompe per l'approvigionamento idrico
1)
Configurazione pompe: 4 unità di pompe a frequenza variabile, 15kW
2)
Pressione imposta su 0.8Mpa
3)
Scelta manometro di pressione: trasmettitore di pressione, DC 4~20mA
uscita,1.6Mpa
4)
Scelta convertitore: PI7800 015F3 e pannello approvigionamento idrico
WSC_LINEA SERIALE RS485
5)
Connessione hardware
173
6)
impostazione parametri
Numero parametro
Valore impostazione
Spiegazione
F61
11
Approvigionamento idrico multipompe a pressione
costante
F04
7
Modalità frequenza data come regolazione PID
P00
10
Modalità regolazione PID
P01
100
Limite frequenza in uscita
P02
1
P03
3
P04
50.0%
P05
0.25s
Tempo integrale PID
(messa a punto condizioni visive parametri)
P06
0.000
Tempo differenziale PID
P07
100
Guadagno proporzionale PID
P08
300.0s
Tempo di rilevamento guasto PID (è necessario che
sia maggiore del tempo interruzione pompa)
C00
10ms
Tempo di rilevamento del filtro
C01
La combinazione dei
parametri C01 e C02
viene utilizzata per il
risparmio energetico
del sistema operativo
di controllo e per la
regolazione della
pressione idrica
durante
l’approvigionamento.
Risulta non valido
durante il controllo di
più pompe.
Percentuale di pressione di avvio
C03
10%
Deviazione massima ammissibile
C04
80%
Valore pressione massima raggiunto
C05
60%
Valore pressione minima raggiunto
d00
200 ore
Regolare tempo di approvigionamento idrico,
impostare 200 ore, annullare il timer
d01
5 ore
Impostare tempo rotazione a intervalli regolari
d02
0.5s
Estensione commutazione elettromagnetica
d03
100s
Tempo cambiamento pompa
C02
Selezione segnale di feedback: morsetti esterni IF:
4~20mA
Selezione segnale dato: impostato mediante
tastierino
50.0%=0.8Mpa/1.6Mpa×100%
Segnale impostato mediante tastierino:
50.0%=0.8Mpa/1.6Mpa×100%
Percentuale di pressione di arresto
174
1. Tipo di carico della funzione di approvigionamento di acqua a pressione
costante:
Param
etro
E00
Impost
azione
valore
1
E00
9
Definizione
Pompa, approvigionamento idrico pressione costante pompa singola,
non richiede scheda di interfaccia per approvigionamento idrico a
pressione costante
Approvigionamento idrico a pressione costante a più pompe, richiede
scheda di interfaccia per approvigionamento idrico a pressione costante
realizzando allo stesso tempo la funzione approvigionamento idrico a
pressione costante a quattro pompe.
2. Regolazione PID relativa alla funzione di appovigionamento idrico a
pressione costante
Param
etro
F01
F02
Valori
impost
azione
0
0
F03
F04
7
2
P00
0000
P02
P03
P05
P06
P07
P09
P12
1~3
0~6
★
★
★
★
★
Definizione
Frequenza impostata mediante tastierino su 0hz
Modalità frequenza principale data: frequenza impostata mediante
tastierino
Modalità frequenza ausialire data: modalità regolazione PID
Rapporto frequenza principale e ausialire data: modalità
principale+ausiliare
Monodirezionale, regolazione effetto negativo, nessun azione per il
guasto
Selezione segnale di feedback
Selezione segnale data
Tempo integrale PID, messa a punto in base al loco
Tempo differenziale PID, messa a punto in base al loco
Guadagno proporzionale PID, messa a punto in base al loco
Limite deviazione PID; regolazione in base alle necessità
Campo visualizzazione PID, regolazione in base alle necessità
3. Parametri speciali per la funzione di approvigionamento idrico a pressione
costante
Param
etro
E01
E02
E03
E04
E05
E06
E07
Valore
impost
azioni
10%
2.0
15.00
2.0
80%
60%
0
Definizione
Devizione pressione all’avvio
Ritardo di avvio
Frequenza di arresto
Ritardo di arresto
Valore massimo pressione raggiunto
Valore minimo pressione raggiunto
Impostazione timer approvigionamento idrico
4. Parametri speciali per la funzione di approvigionamento idrico a pressione
costante a più pompe
Param
etro
E08
E09
E10
Valore
impost
azione
0.25
0.500
100
Definizione
Impostazione tempo rotazione intervalli regolari
Ritardo commutazione elettromagnetica
Tempo di cambiamento della pompa
175
E11
0
E12
E13
E14
0000
1112
★
Stato fognatura pompe (è possibile impostare l’avvio mediante
tastierino)
Impostazione approvigionamento idrico a pressione costante
Impostazione più pompe
Stato più pompe
5. Parametri IO funzione approvigionamento idrico a pressione costante
Parametro
o21~o24
o21~o24
o36~o46
o36~o46
o36~o46
o36~o46
o36~o46
o36~o46
o36~o46
o36~o46
o36~o46
o36~o46
Valore
impost
azioni
25
26
51
52
53
54
55
56
57
58
59
60
Definizione
Pressione massima raggiunta
Pressione minima raggiunta
Avvio dolce pompa 1
Arresto pompa 1
Avvio dolce pompa 2
Arresto pompa 2
Avvio dolce pompa 3
Arresto pompa 3
Avvio dolce pompa 4
Arresto pompa 4
Rotazione comando manuale
Regolazione tempo approvigionamento idrico tempo 0
176