")
ELETTROMAGNETISMO
PARTE II
PIERO CALDIROLA
MARCELLO FONTANESI
ELIO SINDONI
MASSON
Milano • Parigi • Barcellona • Bonn
1993
PREFAZIONE
È questa la seconda parte del volume di «Elettromagnetismo» che gli autori hanno
tratto dal contenuto dei corsi di Fisica Generale II da essi tenuti negli ultimi anni
presso l'Università di Milano. La prima parte del volume, dedicata essenzialmente
all'elettrostatica e alla corrente stazionaria, era stata pubblicata nel 1974.
Il nuovo volume inizia con la trattazione della magnetostatica nel vuoto e nei mezzi
materiali: se ne espongono le leggi fenomenologiche mostrando poi come le proprietà
magnetiche di un corpo macroscopico traggano origine dalle proprietà degli atomi
che lo costituiscono. Segue la trattazione del fenomeno dell'induzione elettromagnetica
e quella dei circuiti in corrente continua ed alternata.
Infine, partendo dalle leggi fenomenologiche già studiate, si espone la teoria del
campo elettromagnetico compendiata nelle equazioni di Maxwell illustrandone alcuni
aspetti importanti quali le proprietà delle onde elettromagnetiche in dipendenza anche
delle caratteristiche del mezzo in cui esse si propagano. Un particolare accento viene
dato, anche per l'interesse tecnico che l'argomento presenta, alla propagazione di tali
onde in cavi coassiali e in guide.
L'ultimo capitolo contiene un'esposizione sommaria ma autosufficiente della teoria
della relatività ristretta (meccanica ed elettromagnetismo), il cui algoritmo viene
semplificato al massimo (evitando fra l'altro l'uso del calcolo tensoriale) ed applicato
a problemi concreti di interesse diretto per la fìsica sperimentale.
GLI AUTORI
Milano, aprile 1976
INDICE
CAPITOLO 8
MAGNETOSTATICA NEL VUOTO
8.1
8.2
8.3
8.4
8.5
8.6
8.7
8.8
8.9
8.10
8.11
8.12
8.13
8.14
Introduzione
Il vettore induzione magnetica B
Forza agente su un circuito percorso da corrente
Coppia agente su un circuito chiuso percorso da corrente
Comportamento di un ago magnetico in un campo magnetico
Moto di un elettrone in un campo magnetico uniforme
Campo generato da un filo rettilineo indefinito percorso da corrente. Legge
di Biot e Savart
Prima formula di Laplace e sue applicazioni
Forze agenti tra due circuiti percorsi da corrente
Potenziale scalare magnetico
Legge della circuitazione di Ampère
II flusso di B
Potenziale vettore magnetico
Potenziale vettore magnetico generato da una spira percorsa da corrente
1
3
5
7
10
13
15
17
24
26
29
33
34
35
CAPITOLO 9
MAGNETOSTATICA NEI MEZZI MATERIALI
9.1
9.2
9.3
9.4
9.5
9.6
9.7
Introduzione
Correnti atomiche e vettore di magnetizzazione
Correrie di magnetizzazione
Campo magnetico generato da un materiale magnetizzato. Rappresenta
zione mediante correnti di magnetizzazione
Il vettore H. La legge della circuitazione di Ampère in presenza dei materiali magnetizzati
Le equazioni del campo. Le condizioni al contorno di B ed H
Campo magnetico esterno ad un materiale magnetizzato. Rappresentazione
mediante poli magnetici
39
39
41
46
48
49
51
VII
9.8
9.9
9.10
9.11
9.12
Campo magnetico interno ad un materiale magnetizzato
La suscettività e la permeabilità magnetica
Materiali ferromagnetici. Ciclo di isteresi
Circuiti magnetici
Magneti permanenti
53
56
58
62
66
CAPITOLO 10
ORIGINE ATOMICA DELLE PROPRIETÀ MAGNETICHE DI UN MATERIALE
10.1
10.2
10.3
10.4
10.5
Introduzione
Campo magnetico molecolare
Origine del diamagnetismo
L'origine del paramagnetismo
Il ferromagnetismo e la legge di Curie-Weiss
71
72
74
80
82
CAPITOLO 11
L'INDUZIONE ELETTROMAGNETICA
11.1
11.2
11.3
11.4
11.5
11.6
Introduzione
La legge dell'induzione elettromagnetica
Flusso tagliato e flusso concatenato
Autoinduttanza
Mutua induttanza
L'energia magnetica
89
89
92
94
96
97
CAPITOLO 12
CIRCUITI IN CORRENTE CONTINUA ED ALTERNATA
12.1 Introduzione
12.2 Generatori di tensione e di correnti costanti
12.3 Le leggi di Kirchhoff
12.4 Il metodo delle correnti dei rami
12.5 Il metodo delle correnti di maglia
12.6 Metodo dei nodi
12.7 Il teorema di Thevenin
12.8 Fenomeni transitori
12.9 Correnti alternate
12.10 Rappresentazioni mediante vettori ruotanti
12.11 Rappresentazione mediante numeri complessi
12.12 L'impendenza
12.13 Circuito R-L-C in serie
12.14 Potenza dissipata nei circuiti a corrente alternata
101
102
103
106
109
110
112
123
126
129
131
135
143
IX
CAPITOLO 13
TEORIA DEL CAMPO ELETTROMAGNETICO
13.1 Equazioni differenziali di Maxwell
13.2 Conservazione dell'energia e vettore di Poynting
13.3 Quantità di moto elettromagnetica
13.4 Potenziali del campo elettromagnetico
13.5 Equazione generale delle onde
13.6 Onde piane in un mezzo omogeneo isolante
13.7 Onde sinusoidali
13.8 Rappresentazione complessa delle onde
13.9 Onde piane monocromatiche in un mezzo conduttore
13.10 Quantità di moto, energia, intensità di un'onda elettromagnetica
13.11 Condizioni al contorno per campi variabili
13.12 Riflessione e rifrazione delle onde elettromagnetiche
13.13 Cenno alle onde emergenti o convergenti in un punto
13.14 Radiazione di una carica in moto accelerato
147
152
153
155
158
160
165
168
169
170
174
176
179
181
CAPITOLO 14
ONDE ELETTROMAGNETICHE IN CAVI COASSIALI E GUIDE D'ONDA
14.1
14.2
14.3
14.4
Introduzione
Onde in un cavo coassiale
Il cavo coassiale rappresentato mediante elementi concentrati
Guida d'onda rettangolare
187
187
191
196
CAPITOLO 15
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
15.1
15.2
15.3
15.4
15.5
Relatività della meccanica galileiana
I fenomeni elettromagnetici e l'ipotesi dell'etere
I principi della relatività ristretta
Elettrodinamica Relativistica
Dinamica Relativistica
201
210
218
244
251
INDICE ANALITICO
263
8
Magnetostatica nel vuoto
8.1
Introduzione
Risulta certamente difficile poter dire quando e da chi per primo fu osservato
il fenomeno dell'attrazione tra due pezzi di materiale ferroso spontaneamente
magnetizzati.
Possiamo tuttavia ritenere che questo evento si sia verificato in tempi piuttosto
remoti e che abbia senz'altro costituito motivo di sorpresa e fonte di riflessione
per gli occasionali sperimentatori, tanto più se consideriamo che su questo
argomento anche in epoche recenti le nostre conoscenze erano rimaste estremamente approssimative e pervase più di occultismo che di spirito scientifico.
Già in testi di scrittori greci e latini si rintracciano frequenti accenni alle
proprietà presentate da un particolare materiale, da noi attualmente denominato
magnetite, e che sappiamo costituito da un ossido ferrico ferroso (Fe3O4), di
attrarre oggetti di ferro e di trasmettere ad essi, una volta venuti in contatto, lo
stesso potere. Il termine magnete, con il quale questo materiale veniva indicato,
secondo la leggenda deriverebbe dal nome di un pastore greco, Mχγης, il quale
per caso scopri che la punta di ferro del suo bastone veniva attirata da alcune
rocce. Più probabilmente l'origine di questo nome dovrebbe derivare dal nome di
una località. Magnesia, presso la quale furono rinvenuti nell'antichità giacimenti
di magnetite.
Benché, come abbiamo accennato, la conoscenza dei fenomeni più appariscenti
connessi con i materiali magnetizzati risalga ad epoche lontane nel tempo, tuttavia
i primi accenni ad una applicazione pratica del magnetismo si possono ritrovare in
Cina, in scritti del XI secolo, ed in Europa in scritti del XII secolo.
2
MAGNETOSTATICA NEL VUOTO
[CAP. 8
Fu infatti proprio nel periodo di poco antecedente alla stesura di queste cronache
che la capacità di un ago di materiale magnetizzato ad assumere la direzione sudnord cominciò a venir utilizzata nella costruzione della bussola ai fini
dell'orientamento, soprattutto durante la navigazione. Solo verso la fine del XVI
secolo e all'inizio del XVII secolo lo studio dei fenomeni magnetici ha assunto
un aspetto sistematico basato su dati sperimentali attendibili. Nel 1600 in
particolare William Gilbert riassunse, nel trattato «De Magnete», le conoscenze
disponibili al suo tempo sulle interazioni tra magneti. Gilbert, oltre ad offrire con
il suo trattato un valido punto di partenza per le speculazioni successive,
contribuì in maniera originale allo sviluppo delle teorie sul magnetismo con
alcune esperienze da lui condotte su piccole sferette di magnetite che egli chiamò
terrule. Mostrò come sottili aghi magnetici, disposti nelle vicinanze di una sfera
di materiale magnetico, subissero delle azioni torcenti disponendosi lungo delle
linee che partendo da un polo terminavano nel polo opposto. Estrapolando i
risultati così ottenuti, egli affermò che la terra altro non era che un grosso
magnete, i poli magnetici del quale erano situati in vicinanza dei poli geografici:
come sappiamo questo concetto è oggi alla base della moderna teoria del
magnetismo terrestre.
Nel 1777 C. A. Coulomb, per mezzo della stessa bilancia di torsione da lui
impiegata per ricavare la legge sulle forze esercitantesi tra cariche elettriche,
stabilì una legge analoga per le attrazioni magnetiche. La dimostrazione che anche
la forza attrattiva o repulsiva tra due piccoli corpi magnetizzati presentava un
andamento proporzionale all'inverso del quadrato dalla loro distanza impresse un
notevole vigore alle ricerche inerenti i corpi magnetici. Si arriva così ai primi
dell'ottocento con l'opinione diffusa tra i ricercatori che i fenomeni elettrici ed i
fenomeni magnetici dovessero avere qualcosa in comune anche se non era stato
possibile mettere in evidenza alcuna influenza reciproca tra corpi elettricamente
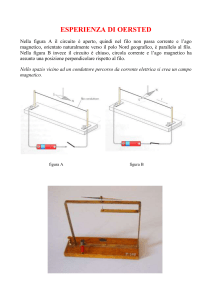
carichi e calamite naturali. Fu il fisico danese Hans Christian Oersted che nel
1820 scoprì l'esistenza di una interazione tra magneti naturali e cariche in moto.
Per primo infatti egli si accorse che una corrente elettrica produceva una azione
rotante su un ago di materiale magnetizzato posto in vicinanza del filo percorso da
corrente. Tale scoperta segnò l'inizio della moderna teoria del magnetismo. La
comunicazione di questi risultati data nel settembre 1820 da Arago alla
Accademia delle Scienze Francesi spinsero A. M. Ampère a ripetere ed ampliare
le esperienze di Oersted. Il fisico francese non solo riuscì a riottenere in breve
tempo i risultati di Oersted ma dimostrò anche che due fili percorsi nello stesso
verso da corrente elettrica si attraggono mentre quando vengono percorsi dalla
corrente in verso opposto si respingono. Trovò inoltre che una spira mobile
percorsa da corrente in presenza di un corpo magnetizzato o di un'altra spira
percorsa da corrente si orienta in una determinata direzione in maniera analoga e
quanto avviene per l'ago di una bussola. L'intuizione più famosa di Ampère resta
comunque quella sull'origine elettrica delle forze magnetiche: essa è basata
sull'ipotesi che attorno ad ogni molecola di un corpo magnetico possa circolare
una corrente elettrica microscopica. Tutte queste scoperte, unite a quella compiuta
intorno al 1832 da M. Faraday sull'induzione elettromagnetica, vennero infine
riprese, rielaborate e
8.2]
IL VETTORE INDUZIONE MAGNETICA B
3
poste nella forma matematica definitiva, che è quella che ancor oggi utilizziamo,
da Clark Maxwell. Scopo di questo e dei tre successivi capitoli è quello di esporre
le principali leggi che regolano i fenomeni del magnetismo, di dare qualche breve
cenno sulla loro interpretazione microscopica e di ricavare le corrispondenti
equazioni di Maxwell nel vuoto e nella materia.
Al fine di introdurre alcuni concetti elementari cominciamo col ricordare una
semplice esperienza, che fu anche una delle più significative compiute da Ampère.
Precisamente quella relativa all'azione reciproca fra due circuiti A e B nei quali
siano inseriti dei generatori, che consentono di fare circolare in essi delle correnti
elettriche. Supponiamo che il circuito A sia tenuto fisso, mentre quello B sia libero
di ruotare attorno ad un asse. È immediato constatare che quando si faccia fluire
corrente nei due circuiti, il circuito mobile B si mette in moto ruotando fino ad
assumere una determinata posizione, dipendente da quella di A. Si può così
concludere che fra i due circuiti si esercitano delle forze che, per il fatto di trarre
origine dalla corrente elettrica, si sogliono chiamare elettrodinamiche. E come
l'azione elettrica fra due cariche si ritiene dovuta al fatto che ognuna di esse è
immersa nel campo elettrico generato dall'altra, così l'azione elettrodinamica fra
correnti (che, come sappiamo, non sono altro che cariche in moto) può essere
interpretata come dovuta al fatto che ciascuna di esse viene a trovarsi immersa in
un particolare campo (distinto da quello elettrico) generato dall'altra. A tale campo
si dà il nome di campo magnetico. Più precisamente, dunque, una carica in moto
esercita su un'altra carica oltre alla forza di natura elettrica, un'altra forza
denominata magnetica.
In base a quanto detto è anche chiaro che effetti analoghi si avranno
sostituendo al filo percorso da corrente del circuito B un fascetto di elettroni quale
è quello che si ha in un tubo a raggi catodici. Si osserva infatti che, sotto l'azione
del campo magnetico creato dal circuito A, il fascetto di elettroni subisce una
deflessione.
In questo capitolo ci limiteremo allo studio del campo magnetico generato da
circuiti, disposti nel vuoto, percorsi da correnti stazionarie: studieremo cioè la
cosiddetta magnetostatica nel vuoto.
Campi magnetici sono anche quelli generati dai magneti naturali (calamite) e
dai magneti permanenti, di acciaio, sui quali torneremo in seguito; vedremo allora
che il comportamento delle calamite e dei magneti artificiali può essere compreso
alla luce dei risultati relativi ai campi magnetici generati dalle correnti in
conformità a quanto intuito da Ampère.
8.2
Il vettore induzione magnetica B
Come per esplorare il campo elettrico si adopera una carica puntiforme di
piccolo valore (in modo che essa non alteri per influenza o per polarizzazione
elettrostatiche la distribuzione delle cariche generanti il campo che si vuole
studiare), così per esplorare il campo magnetico si può ricorrere a una carica
analoga in moto.
4
MAGNETOSTATICA NEL VUOTO
[CAP. 8
Ricordiamo che il campo elettrico E viene definito come il rapporto :
(8.1)
essendo q la carica esploratrice ed F la forza a cui essa è soggetta. Nell'assumere
questa definizione si suppone che la carica q sia tenuta ferma in un punto dello
spazio e che su di essa non agisca altra forza se non quella di natura elettrica. In
modo analogo, nel definire il vettore B, che caratterizza il campo magnetico e
prende il nome di vettore induzione magnetica, (1) si suppone che sulla carica q, in
moto con la velocità u, non operino altre forze (di natura ad esempio elettrica o
meccanica) all'infuori di quella dovuta alla esistenza di un campo magnetico.
Misurando allora il valore della forza F, dovuta alle azioni magnetiche nelle varie
direzioni, si osserva che nella direzione di u tale forza è nulla mentre essa risulta
massima in direzione perpendicolare ad u ; inoltre il modulo della forza è
proporzionale alla carica q e al modulo u della velocità. Assumeremo come
direzione e verso del vettore induzione magnetica B in un certo punto la direzione
e il verso che risulta dalla relazione sperimentale:
F = qu × B .
(8.2)
Si può poi verificare che questa relazione è effettivamente valida per tutte le
velocità u. La (8.2) è comunemente denominata forza di Lorentz.
È importante notare come non sia sufficiente una sola operazione di misura per
determinare B. Infatti non è possibile, con una semplice operazione, ricavare B
dalla relazione vettoriale (8.2) e questo è messo bene in evidenza dalle relazioni
(1.18) e (1.19) riportate nel primo capitolo. Eseguendo due misure di F, che
denoteremo F1 ed F2, in corrispondenza a due velocità u1 ed u2 tra loro normali,
in virtù della (8.2) si ha:
(8.3)
Moltiplicando scalarmente per u1 queste relazioni, ricordando che u1 ed u2
(1) Secondo la concezione moderna del magnetismo, da noi seguita in questo libro,
risulterebbe più appropriato attribuire al vettore B il nome di intensità del campo
magnetico, dato che esso è l'analogo magnetico del vettore E, intensità di campo elettrico.
Nella concezione antica del campo magnetico, la quale metteva in primo piano il campo
magnetico generato dalle calamite, al vettore B era stato riservato il nome di vettore
induzione magnetica. Si è tuttavia convenuto, al fine di evitare noiosi cambiamenti di
nomenclatura, di conservare tale nome anche nelle esposizioni moderne del magnetismo,
sebbene esso appaia evidentemente improprio.
8.3]
FORZA AGENTE SU UN CIRCUITO PERCORSO DA CORRENTE
5
sono tra loro perpendicolari, e sottraendo la seconda dalla prima, otteniamo:
(8.4)
espressione che permette di determinare la costante c1. La prima delle (8.3) può
pertanto scriversi:
(8.5)
da cui si vede esplicitamente come per la determinazione del vettore B siano
necessarie e sufficienti due distinte misure. Dalla (8.2) è possibile ricavare le
dimensioni e le unità di misura dell'induzione magnetica B. Si ha infatti per le
dimensioni:
mentre l'unità di misura nel sistema MKS è:
(8.7)
avendo denominato weber il volt ⋅ secondo; un weber/m2 è il valore dell'induzione
magnetica che esercita su una carica di un coulomb, che si muova
perpendicolarmente al campo magnetico con la velocità di 1 m/s, la forza di un
newton.
Vogliamo osservare che la definizione di B per mezzo della forza di Lorentz
non è la sola possibile. Nella letteratura si trovano frequentemente altre due
definizioni, ovviamente equivalenti a quella da noi adottata. La prima di queste è
basata sulla forza a cui è sottoposto, in un campo magnetico, un elemento di
conduttore metallico in cui fluisca una corrente di intensità I; la seconda sul
momento meccanico della coppia di forze che il campo magnetico esercita su un
circuito attraversato da corrente. Nei paragrafi successivi tratteremo brevemente
questi due argomenti cogliendo l'occasione per introdurre alcuni concetti
fondamentali per l'esposizione della teoria della magnetostatica.
8.3
Forza agente su un circuito percorso da corrente
Consideriamo un filo metallico rettilineo di lunghezza l e sezione costante S,
percorso da una corrente stazionaria di intensità I, posto in una regione dello
spazio ove esista un campo magnetico uniforme. Si può provare sperimentalmente
che sul conduttore agisce una forza, dovuta solo alle azioni magnetiche, data dalla
relazione:
F=I l×B
(8.8)
6
MAGNETOSTATICA NEL VUOTO
[CAP. 8
dove B è il vettore induzione magnetica introdotto nel paragrafo precedente ed l è
un vettore che ha modulo uguale alla lunghezza del filo e direzione e verso
coincidenti con quelli in cui fluisce la corrente I. Appare evidente come quest'ultima relazione possa essere utilizzata in luogo della (8.2) per la definizione
del vettore B.
Vogliamo ora dimostrare che la relazione (8.8) può essere ricavata partendo da
un punto di vista microscopico utilizzando l'espressione della forza di Lorentz
agente su una carica in moto. La corrente I che percorre il filo è uguale a JS dove
J è la densità di corrente che, come sappiamo, è data da:
J = -e N u
(8.9)
con N numero di elettroni liberi per unità di volume, e modulo della carica
dell'elettrone ed u velocità di deriva degli elettroni. Essendo il conduttore
immerso in un campo magnetico uniforme, su ognuno degli elettroni liberi si
esercita la forza di Lorentz F= - e u × B e sul filo agisce quindi una forza
risultante uguale a:
F = - e NSl u × B
(8.10)
avendo tenuto conto che il numero totale di elettroni liberi nel conduttore è
uguale ad NSl. Questa espressione, utilizzando la (8.9), diviene:
F = Sl J × B.
(8.11)
Attribuendo un'orientazione al filo e precisamente quella della densità di corrente
J, si può scrivere
F=Il×B
(8.12)
che è appunto la relazione macroscopica sperimentale introdotta all'inizio di
questo paragrafo.
Nel caso di un circuito di forma qualsiasi, percorso da corrente stazionaria I e
posto in un campo magnetico in generale non uniforme, è possibile calcolare la
forza agente su di esso applicando una formula, dovuta a Laplace, secondo la
quale ogni elemento infinitesimo dl di circuito è sottoposto ad una forza:
dF = I dl × B
(8.13)
avendo indicato con B il valore dell'induzione magnetica nel punto ove è posto
l'elemento dl, orientale nella direzione e verso di percorrenza della corrente.
Integrando la (8.13) lungo la linea C del circuito otteniamo:
(8.14)
8.4]
COPPIA AGENTE SU UN CIRCUITO CHIUSO
7
che rappresenta la forza risultante esercitata dal campo magnetico sul circuito
stesso. L'espressione (8.13) prende il nome di seconda formula di Laplace.
È importante notare come tra le espressioni (8.12) e (8.13) esista una
differenza fondamentale. Infatti mentre la prima rappresenta una relazione
sperimentale ricavabile in pratica mediante un circuito di prova di dimensioni
piccole rispetto alla distanza su cui il campo magnetico si mantiene uniforme, la
seconda consiste in una formula matematica di natura puramente teorica,
riguardante quantità infinitesime, la cui validità è verificata solo a posteriori
confrontando il valore della forza F determinata sperimentalmente con il valore
dato dalla (8.14).
Poiché valgono le relazioni I dl = J S dl = J dυ è possibile ottenere dalla
(8.13) la relazione:
(8.15)
estendendo l'integrale al volume V occupato dal conduttore percorso da corrente.
8.4 Coppia agente su un circuito chiuso percorso da corrente
Sia dato un circuito C, piano e di forma qualsiasi, percorso da una corrente I,
posto in una regione dello spazio ove esista un campo magnetico che
supporremo uniforme nella regione in cui è posta la spira di corrente. Sulla spira
agisce una forza nulla; infatti per la (8.14) abbiamo che:
(8.16)
essendo ovviamente l'integrale entro parentesi uguale a zero. A causa
dell'uniformità del campo magnetico è dunque F = 0; è però possibile dimostrare
che in generale sulla spira percorsa da corrente agisce una coppia di forze. A tale
scopo scegliamo una terna di assi cartesiani in modo che l'asse z sia
perpendicolare al piano contenente la spira ed orientato in modo che la corrente I
fluisca in verso antiorario rispetto ad esso. Il vettore induzione magnetica B,
uniforme su tutta la superficie delimitata dalla spira, formi un angolo ϑ con l'asse
z, il piano z = 0 coincida con il piano contenente la spira e l'asse x della terna
cartesiana sia parallelo alla proiezione del vettore B su questo piano.
Immaginiamo di suddividere il nostro circuito in tante piccole strisce, il
contorno di ognuna delle quali rappresenti una spira di altezza infinitesima
percorsa dalla corrente I, sempre in verso antiorario. Due spire adiacenti qualsiasi,
hanno un tratto in comune in cui fluisce una corrente di intensità uguale ma di
verso opposto; se riuniamo tutte le spire elementari in modo da riottenere il
circuito iniziale, l'unica corrente che risulta in definitiva diversa da zero (cioè non
compensata da altre in senso opposto) è quella che circola lungo il contorno del
circuito. Consideriamo in particolare la spira elementare A1 A2 A3 A4 di
8
MAGNETOSTATICA NEL VUOTO
[CAP. 8
Fig. 8.1. Valutiamo anzitutto l'effetto delle forze cui è sottoposta la spira a causa
della presenza della componente del vettore B lungo la direzione z. Tali forze,
come indicato dalla (8.14), agiranno nel piano della spira. Date le dimensioni
elementari della spira, le lunghezze dei suoi lati opposti possono essere
considerate uguali ; poiché le forze agenti su di essi sono proporzionali alla
lunghezza dei lati esse risultano a due a due uguali in modulo e dirette in verso
opposto, formando così un sistema in equilibrio. Seguendo un procedimento
diverso abbiamo ritrovato pertanto per un caso particolare il risultato espresso in
forma generale dalla equazione (8.16).
FIG.
8.1 - Coppia agente su un circuito percorso da corrente in presenza di un campo
magnetico.
Per quanto riguarda le forze esercitate dalla componente del vettore induzione
magnetica lungo l'asse x, B sen ϑ, abbiamo che due di esse, e precisamente quelle
applicate ai lati Al A2 ed A3 A4 sono nulle perché la componente di B è
rispettivamente parallela e antiparallela alla direzione della corrente. Le altre due
forze, applicate ai lati A2 A3 e A4 A1, risultano uguali in modulo, dirette
perpendicolarmente al piano contenente la spira ma con verso opposto: esse
formano perciò una coppia di forze. Entrambe le forze sono proporzionali alla
lunghezza dy della proiezione del lato dl in questione sull'asse y, e sono date dalla
relazione dF = IB sen ϑ dy. Il modulo del momento meccanico della coppia è
allora:
(8.17)
dove l è la distanza tra i punti di applicazione delle due forze. Indicando con da
l'area l dy della spira elementare, introduciamo la seguente grandezza vettoriale:
dm = I da n
(8.18)
con n che rappresenta il versore normale alla superficie della spira orientato in
modo da veder scorrere la corrente in verso antiorario (nel nostro caso perciò
8.4]
COPPIA AGENTE SU UN CIRCUITO CHIUSO
9
n è parallelo all'asse z). La grandezza (8.17) prende il nome di momento
magnetico della spira elementare.
Per la (8.18) il momento meccanico della coppia di forze applicata alla spira
elementare di superficie da assume la forma:
(8.19)
e, per l'uniformità del vettore B, il momento meccanico della coppia agente su
tutto il circuito C risulta dato da:
(8.20)
dove:
m = IS n
(8.21)
è il momento magnetico del circuito C, racchiudente una superficie S, percorso
dalla corrente I.
L'azione della coppia di forze dovuta al campo magnetico tende a far ruotare il
piano in cui giace la spira fino a che esso non risulti perpendicolare al vettore B.
In questa condizione, come appare evidente dalla (8,20), il momento meccanico
r
risulta nullo poiché m e B sono paralleli.
È anche interessante ricavare l'espressione (8.20) seguendo un procedimento
diverso da quello ora descritto. A questo scopo consideriamo nuovamente il
circuito C. Su un tratto di esso agisce una forza dF = I dl × B, ed il momento
d
di questa forza rispetto all'origine O degli assi cartesiani vale:
(8.22)
con r che rappresenta la distanza orientata tra O ed il tratto dl. Integrando la
(8.22) lungo la linea chiusa C otteniamo:
(8.23)
Sostituendo nell'integrale (8.23) B= Bx i + Bz k, dl = dx i + dy j ed r = xi + yj si ha:
(8.24)
I primi tre integrali a destra della (8.24) sono nulli, come può essere visto (vedi
Fig. 8.2) spezzando l'integrale lungo C in due parti, una da P1, a P2 e l'altra da P2 a
P1 .
10
MAGNETOSTATICA NEL VUOTO
[CAP. 8
Il quarto integrale è invece diverso da zero e fornisce l'area racchiusa dal
circuito C. Infatti l'integrale esteso da P1 a P2, come può vedersi in Fig. 8.2, dà
come risultato l'area della zona tratteggiata in figura più quella racchiusa dalla
linea C, mentre l'integrale esteso da P2 a P1 rappresenta l'area della sola zona
tratteggiata con il segno negativo.
FiG. 8.2 - Calcolo degli integrali della relazione (8.24).
In definitiva troviamo che, avendo preso m = mk:
(8.25)
risultato che coincide con la (8.20).
Mediante ragionamenti analoghi è inoltre facile dimostrare che vale la relazione:
(8.26)
dove S = Sn.
Il momento di dipolo magnetico della spira può essere così espresso anche
nella forma:
(8.27)
8.5 Comportamento di un ago magnetico in un campo magnetico
Un ago di materiale magnetico, libero di ruotare intorno ad un asse, sottoposto
all'azione di un campo magnetico, quale ad esempio quello generato da una
distribuzione di correnti, si comporta in maniera analoga al circuito elementare
descritto nel paragrafo precedente. E precisamente: esso si dispone
8.5]
COMPORTAMENTO DI UN AGO MAGNETICO
11
parallelamente alla direzione del vettore B in modo tale che il suo polo nord si
rivolge nel verso di B (1).
Se l'ago viene scostato dalla sua posizione di equilibrio, è possibile constatare
che esso viene richiamato in tale posizione da una coppia di forze, il cui momento
meccanico dipende dal vettore B secondo una espressione del tipo :
(8.28)
ove K è un vettore caratteristico del particolare ago considerato, dipendente cioè
dalle sue dimensioni e dalla sua magnetizzazione, orientato nel senso polo Sud polo Nord dell'ago (asse dell'ago). La relazione (8.28) mostra che il momento
della coppia che si esercita sull'ago è perpendicolare al piano contenente l'ago e il
vettore B, ed ha modulo:
(8.29)
essendo ϑ l'angolo tra l'asse dell'ago ed il vettore B.
Osserviamo che un comportamento simile a quello di un ago magnetico
immerso in un campo magnetico descritto dall'equazione (8.28) è quello, trattato
nel paragrafo 4.3, di un dipolo elettrico posto in un campo elettrostatico E.
Avendo definito il momento di dipolo elettrico con p = qδ eravamo stati in grado
di mostrare che, sotto l'azione di un campo elettrostatico E, il dipolo era soggetto
ad una coppia di momento
= p × E. L'analogia formale tra questa espressione
e la (8.28), suggerisce di immaginare l'ago magnetico come costituito da due
cariche magnetiche, o come si suol dire masse magnetiche, + qm e - qm, una
positiva e l'altra negativa, concentrate rispettivamente nel polo Nord e nel polo
Sud dell'ago. (2)
Introducendo allora un vettore m= qm δ, che denomineremo momento
magnetico dell'ago, tale che:
K = m=qm δ
(8.30)
(1) Una immediata applicazione di quanto detto è la bussola: quando l'ago magnetico è
sottoposto alla sola azione del campo magnetico terrestre, esso si orienta in modo da indicare la
direzione del Nord.
(2) Come risulta chiaro dalla nostra espressione, il concetto di massa magnetica è del tutto
fittizio; nella primitiva concezione del magnetismo, ormai superata, si attribuiva invece ad esso
un significato fisico effettivo analogo a quello attribuito alle cariche elettriche. Fu Weiss che
introdusse nella teoria moderna la parola magnetone per rappresentare una massa magnetica
elementare analoga all'elettrone. Questo magnetone o monopolo magnetico, che fino ad oggi
non ha potuto trovare conferma sperimentale, è sempre risultato per i fisici estremamente
allettante in quanto l'esistenza di una tale carica renderebbe simmetriche le equazioni di
Maxwell. Ricerche volte ad isolare un monopolo magnetico sono in corso in molti laboratori;
alcune di queste erano state precedentemente condotte cercando la presenza di monopoli nella
radiazione cosmica. In particolare si è esaminata la tensione indotta in una spira
superconduttrice quando ad esempio attraverso di essa viene fatto passare del materiale, quale
un meteorite, che è stato soggetto ad un lungo bombardamento da parte di raggi cosmici.
12
MAGNETOSTATICA NEL VUOTO
[CAP. 8
la (8.28) si scrive:
= m × B.
(8.31)
Si noti che la (8.30) costituisce, a tutto rigore, la definizione stessa della massa
magnetica qm associata a un dipolo magnetico di momento magnetico K.
Il confronto tra la (8.31) e la (8.20) mostra immediatamente che l'azione
meccanica che si esercita rispettivamente su di un ago magnetico e su di un
circuito percorso da corrente immersi in un campo magnetico è la stessa se il
momento magnetico dell'ago e quello del circuito, definito secondo la (8.21) come
IS n, hanno lo stesso valore. In altri termini, sempre che sia verificata
l'eguaglianza tra i rispettivi momenti magnetici, ago magnetico e circuito percorso
da corrente risultano equivalenti agli effetti dell'azione meccanica esercitata su di
essi da parte di un campo magnetico esterno che tende ad orientare il momento
magnetico m parallelamente al suo vettore B. Ma come fu dimostrato da Ampère
l'equivalenza tra ago magnetico e circuito è ancora più stretta, in quanto si può
provare (come vedremo in seguito) che essi sono equivalenti non solo per quanto
riguarda le azioni meccaniche subite da parte di un campo magnetico in cui si
trovino immersi, ma anche per quanto riguarda il campo magnetico da essi
generato.
Le precedenti considerazioni sull'analogia tra dipolo elettrico e dipolo
magnetico e tra spira percorsa da corrente ad ago magnetico suggeriscono la
possibilità di considerare un circuito percorso da una corrente I sotto un nuovo
aspetto, particolarmente interessante. Prendiamo in esame un circuito C percorso
da una corrente I e suddividiamo una superficie qualsiasi S, che si appoggi su tale
circuito e venga quindi da esso delimitata, in tante piccole areole elementari da.
Secondo lo schema utilizzato nel paragrafo precedente si può pensare che il bordo
di ciascuna di queste areole sia percorso dalla corrente I sempre nello stesso verso
e che la sovrapposizione di tutte queste areole fornisca, come già detto, il circuito
C iniziale. Ad ognuna delle superficie elementari da è associato un momento
magnetico dm = I da n. Per l'equivalenza tra spira ed ago magnetico caratterizzati
da un eguale momento magnetico possiamo considerare la spira elementare come
una superficie fisica da sulle cui due faccie esistono due distribuzioni di poli
magnetici di segno opposto separate da una piccola distanza δ orientata come la
normale esterna n. La densità superficiale σm di queste distribuzioni è data dalla
relazione:
dm =I da n = σm da δ
(8.32)
e quindi:
σm =
I
δ
(8.33)
Sommando tutte le areole da otteniamo una superficie sulle cui due faccie
esistono due distribuzioni superficiali di poli magnetici ± σm con modulo dato
8.6]
MOTO DI UN ELETTRONE IN UN CAMPO MAGNETICO UNIFORME
13
dalla (8.33) separate da una distanza δ. Tale superficie prende il nome di lamina
magnetica, ed ai fini degli effetti magnetici a grande distanza è equivalente al
circuito C percorso dalla corrente I.
8.6 Moto di un elettrone in un campo magnetico uniforme
Prendiamo in esame una regione dello spazio nella quale sia presente un
campo magnetico uniforme e scegliamo una terna di assi cartesiani in modo tale
che il vettore induzione magnetica risulti parallelo all'asse z, cioè B = Bk (essendo
k il versore dell'asse z). Consideriamo un elettrone in moto nella regione di campo
magnetico uniforme con velocità iniziale v0 = v0x i + v0y j + v0z k.
L'elettrone di carica - e è soggetto alla forza di Lorentz :
F = -e v × B
(8.34)
pertanto, tenendo conto delle sole azioni magnetiche, l'equazione del moto
dell'elettrone, di massa m, è:
(8.35)
e proiettando sugli assi cartesiani :
(8.36).
Dall'ultima delle (8.36) si ricava immediatamente che:
(8.37)
Poiché inoltre la forza di Lorentz risulta essere perpendicolare allo spostamento e
quindi non compie lavoro, l'energia cinetica Wk dell'elettrone si mantiene costante,
come si può anche direttamente verificare moltiplicando scalarmente per v ambo i
membri della (8.35); pertanto:
(8.38)
Avendo dimostrato che vz è costante, dalla (8.38) deriva che:
(8.39)
14
MAGNETOSTATICA NEL VUOTO
[CAP. 8
Le prime due equazioni del sistema (8.36) possono essere scritte in maniera
compatta nella forma:
(8.40)
con ωc = eB/m. Queste due espressioni possono essere disaccoppiate per quanto
riguarda le incognite vx e vy. Infatti derivando entrambe rispetto al tempo, si
ottiene:
(8.41)
Assumiamo per la prima della (8.41) la soluzione:
vx = A sen (ωc t +ϕ )
(8.42)
dove A e ϕ sono due costanti positive da determinare mediante le condizioni
iniziali. Sostituendo la (8.42) nella prima delle (8.40) ricaviamo che:
vy = - A cos (ωc t + ϕ ) .
(
Ponendo inoltre v1 = v0 x + v0 y
che A = v⊥ per cui :
2
2
)
1/ 2
(8.43)
ed utilizzando la condizione (8.39) si deduce
vx = v⊥ sen (ωc t +ϕ )
(8.44)
vy = - v⊥ cos (ωc t + ϕ )
Dovendo poi essere all'istante t = 0: vx (0) = v0x e vy (0) = v0y, dalla (8.44) si trova
che:
(8.45)
Integrando le equazioni (8.44) e (8.37) si trova che:
(8.46)
8.7]
CAMPO GENERATO DA UN FILO RETTILINEO
15
dove x0, y0 e z0 devono essere determinate mediante le condizioni iniziali.
Prendendo l'origine delle coordinate nel punto ove l'elettrone si trova all'istante
t = 0, si ha (essendo vx0 = v⊥ sen ϕ, vy0 = - v⊥ cos ϕ) che x0 = - v0y/ωc, y0 = v0x/ωc
e z0 = 0.
Dalla (8.46) è possibile vedere come l'elettrone si muova descrivendo un'elica
il cui asse è parallelo alla direzione del vettore B. La proiezione del moto
dell'elettrone su un piano perpendicolare all'asse z consiste in una orbita circolare
con centro nel punto x0, y0 e raggio:
(8.46a)
La misura sperimentale del raggio dell'orbita e la conoscenza della velocità
iniziale dell'elettrone nella direzione perpendicolare al vettore B permettono
quindi, tramite la (8.46a) di determinare l'intensità del campo magnetico nella
regione presa in esame. In un campo magnetico con un valore di B di 1 weber/m2
(1) un elettrone dotato di una velocità perpendicolare a B di 108 m/s compirebbe
un'orbita circolare con un raggio di circa 0,5 mm.
8.7 Campo generato da un filo rettilineo indefinito percorso da corrente. Legge
di Biot e Savart
Ogni circuito percorso da corrente stazionaria deve ovviamente essere un
circuito chiuso. Tuttavia se ci poniamo ad una distanza r dal circuito molto
minore rispetto alle sue dimensioni lineari, potremo considerare in prima approssimazione il conduttore percorso da corrente come un filo rettilineo indefinito.
Consideriamo quindi un filo indefinito percorso da una corrente elettrica
stazionaria I. Per esplorare il campo magnetico da esso generato nella regione
circostante il filo stesso potremo ricorrere, come fecero i primi sperimentatori, alla
osservazione della deviazione di un ago magnetico disposto nei vari punti della
regione in esame. Il risultato di questa esperienza ci permetterebbe di stabilire che
un filo rettilineo percorso da una corrente costante produce attorno a sé un campo
magnetico caratterizzato da un vettore B le cui linee di forza sono circonferenze
che giacciono in un piano normale al conduttore e aventi i centri su di esso; il
verso delle linee di forza è quello antiorario per un osservatore posto in piedi sul
piano contenente la linea di forza e orientato secondo il verso di percorrenza della
corrente (2). come mostrato in Fig. 8.3. La misura del valore di B nei vari punti
dello spazio fu fatta in una serie di celebri esperienze
(1) Un campo magnetico di questo tipo può essere ritenuto sufficientemente intenso tenendo
conto che il valore di B per il campo magnetico terrestre è di 5 ⋅ 10-5 weber⋅m2.
(2) Il verso delle linee di forza può essere determinato, secondo la definizione stessa data da
Ampère, rircondando il conduttore con le dita della mano destra tenendo il pollice diretto nella
direzione di percorrenza della corrente I: il verso indicato dalle restanti quattro dita e quello
delle linee di forza.
16
MAGNETOSTATICA NEL VUOTO
FIG. 8.3
[CAP. 8
- Linee di forza del vettore B generato da un filo indefinito percorso da corrente.
da Biot e Savart osservando le oscillazioni compiute da un ago magnetico sotto
l'azione del campo. La legge che essi derivarono, e che da loro prende nome, è la
seguente:
(8.47)
essendo I l'intensità di corrente, r la distanza dal filo del punto in cui si misura il
campo e K una costante di proporzionalità, dipendente dal particolare sistema di
unità di misura scelto. Nel sistema M. K. S. si pone K= μ0/2π e la quantità μ0,
chiamata permeabilità magnetica del vuoto, risulta avere il valore numerico :
μ0 = 4π ⋅10-7 .
(8.48)
In realtà, per ragioni che almeno in parte risulteranno chiare in seguito,
oggigiorno si preferisce assumere il valore μ0 = 4π ⋅10-7 come una definizione; in
tal caso la (8.47) serve a determinare, con notevole precisione, l'unità di intensità
di corrente, cioè l'ampere.
Le dimensioni di μ0 sono:
(8.49)
Poiché si definisce:
1 henry = 1 ohm ⋅ 1 secondo
(8.50)
la permeabilità magnetica del vuoto si misura anche in henry/metro.
Per la (8.47) e per quanto detto precedentemente sull'andamento delle linee di
forza, il vettore B generato da un filo rettilineo percorso da una corrente I, è dato
da:
(8.51)
8.8 I
PRIMA FORMULA DI LAPLACE E SUE APPLICAZIONI
17
dove s è un versore orientato secondo il verso della corrente e r è un vettore di
modulo pari alla distanza tra il filo ed il punto in cui si considera il campo,
orientato nel verso che va dal filo al punto (Fig. 8.4). Le tre direzioni r, B, s
individuano una terna cartesiana.
FIG. 8.4 - Campo magnetico creato da un filo indefinito percorso da corrente.
8.8
Prima formula di Laplace e sue applicazioni
La legge sperimentale (8.51) di Biot e Savart vale solamente nel caso in cui sia
possibile ritenere verificata l'approssimazione di filo rettilineo indefinito. In tutti
gli altri casi, quando cioè tale approssimazione non sia più valida o il circuito
abbia una forma complicata o si sia in presenza di più circuiti percorsi da corrente,
la determinazione analitica del vettore induzione magnetica B nei vari punti dello
spazio può essere fatta utilizzando il principio di sovrapposizione ed una "formula
elementare, dovuta a Laplace.
Tale legge elementare, chiamata prima formula di Laplace, stabilisce che un
elemento dl di circuito percorso da una corrente I produce in un punto P, distante
r da esso, un vettore induzione magnetica:
(8.52)
avendo scelto come orientamento di dl quello del verso di percorrenza della
corrente e come orientamento di r quello dall'elemento dl al punto P in
considerazione.
Se, rispetto all'origine O delle coordinate di una terna di riferimento cartesiana
l'elemento dl è caratterizzato dal vettore r' ed il punto P dal vettore r.
FIG. 8.5 - Applicazione della prima formula di Laplace ad un circuito generico.
18
MAGNETOSTATICA NEL VUOTO
[CAP. 8
come mostrato in Fig. 8.5, l'espressione (8.52) assume la forma:
(8.53)
Poiché l'esperienza mostra che il principio di sovrapposizione vale per i
fenomeni magnetici in maniera analoga a quanto si verifica per i fenomeni
elettrici, possiamo ritenere che il vettore B, generato da un circuito C percorso da
corrente I, in un punto P distante r dall'origine delle coordinate, sia uguale alla
somma di tanti contributi dB, del tipo (8.53), dovuti ai singoli elementi
infinitesimi dl in cui possiamo immaginare suddiviso il circuito C. Il valore
dell'induzione magnetica in un punto distante r dall'origine si ottiene allora
integrando la (8.53) lungo il circuito C:
(8.54)
dove r', come abbiamo già detto, rappresenta la distanza del generico elemento dl
dall'origine O. Nel caso si abbia a che fare con più circuiti percorsi da corrente, il
valore di B in un punto è dato dalla somma di integrali simili a quello che
compare nella (8.54).
Se in luogo di fili percorsi da corrente, il problema riguarda più in generale
distribuzioni di correnti è possibile considerare al posto della (8.54) l'espressione:
(8.55)
sfruttando la relazione I dl = J dυ. L'integrale è ora esteso a tutto lo spazio in cui
la densità di corrente J è diversa da zero.
La (8.53) è una formula puramente teorica e, dato che non è possibile isolare
un singolo elemento di corrente dl di un circuito, la sua validità non è suscettibile
di verifica sperimentale diretta. Tale validità è tuttavia garantita dal fatto che
sono possibili innumerevoli prove tendenti a confrontare il valore di B, prodotto
da distribuzioni di corrente estremamente differenti tra loro e misurato
sperimentalmente, con il valore calcolabile dalle espressioni (8.54) e (8.55): in
tutti i casi l'accordo risulta più che soddisfacente.
a) Campo magnetico generato da un filo rettilineo indefinito
Una semplice applicazione della prima formula di Laplace è quella relativa ad
un filo rettilineo indefinito percorso da una corrente stazionaria I. Per semplicità
assumiamo che il filo coincida con l'asse z di un sistema di assi cartesiani
8.8]
PRIMA FORMULA DI LAPLACE E SUE APPLICAZIONI
19
e che la corrente fluisca parallelamente alla direzione dell'asse z. Sia P il punto,
distante r dal filo, nel quale vogliamo determinare il valore di B generato dalla
corrente I, e indichiamo con d la distanza tra un elemento generico dz del filo ed
il punto P, come mostrato in Fig. 8.6.
FIG.
8.6 - Applicazione della prima formula di Laplace ad un filo rettilineo percorso da
corrente.
Per la relazione (8.53), nella quale dobbiamo sostituire d a (r - r'), un elemento
dz del circuito fornisce nel punto P un contributo al vettore induzione magnetica
uguale a:
(8.56)
dove ϑ è l'angolo formato tra l'elemento dz ed il vettore d. Integrando la (8.56)
lungo il filo si ricava il modulo dell'induzione magnetica in P, cioè:
(8.57)
Tenendo poi conto delle relazioni:
l'integrale che compare nella (8.57) può essere trasformato in un integrale rispetto
alla variabile ϑ esteso da 0 a π; si ha così:
(8.58)
20
MAGNETOSTATICA NEL VUOTO
[CAP. 5
Questo valore di B calcolato tramite la formula di Laplace coincide con quello
fornito dalla legge sperimentale di Biot e Savart introdotta nel paragrafo
precedente. Per quanto riguarda poi la direzione ed il verso del vettore B nel punto
P è facile rendersi conto tramite la (8.53) che esso è perpendicolare al piano
contenente l'asse z ed il punto P. In Fig. 8.6 pertanto il vettore B risulta
perpendicolare al foglio con il verso entrante.
b) Campo magnetico generato da una spira
Consideriamo una spira piana circolare di raggio R percorsa da una corrente
continua I. Ci proponiamo di calcolare il valore del vettore B in un punto qualsiasi
dell'asse della spira che assumeremo coincidente con l'asse z di una terna
cartesiana, come mostrato in Fig. 8.7.
FIG. 8.7 - Campo assiale di una spira circolare percorsa da corrente.
Innanzitutto è immediato provare, considerando due elementi dl del circuito
simmetrici rispetto all'origine, che il vettore B in ogni punto P dell'asse z risulta
diretto parallelamente all'asse stesso. È sufficiente quindi considerare di ogni
vettore infinitesimo dB dovuto ad un elemento dl della spira solamente la
componente dBz. Indicando con r la distanza tra un generico elemento dl ed il
punto P in questione e tenendo conto che l'angolo formato dal vettore r e da dl è
un angolo retto, applicando la formula (8.52) abbiamo che:
(8.59)
dove α rappresenta l'angolo tra dB e l'asse z. Poiché inoltre valgono le relazioni:
8.8]
PRIMA FORMULA DI LAPLACE E SUE APPLICAZIONI
21
(8.60)
la (8.59) può essere scritta nel modo seguente:
(8.61)
Integrando lungo il percorso della spira si ottiene il risultato:
(8.62)
In particolare al centro della spira il valore dell'induzione magnetica risulta
essere :
(8.63)
In Fig. 8.8 sono riportate in modo schematico le linee di forza del vettore B
generato da una spira percorsa da corrente. Lungo l'asse della spira il vettore B
risulta perpendicolare al piano contenente la spira ed orientato nella stessa
direzione lungo la quale un osservatore, in piedi in questo piano, vedrebbe la
corrente fluire in verso antiorario.
FIG.
8.8 - Linee di forza del vettore B di una spira circolare. Il punto indica la direzione
della corrente uscente dalla pagina, la croce la direzione entrante nella pagina.
c) Campo magnetico generato da un solenoide
Si definisce solenoide un avvolgimento cilindrico di filo conduttore come
quello mostrato in Fig. 8.9.
Consideriamo un solenoide per il quale l'avvolgimento del filo sia uniforme in
modo che il numero N di spire per unità di lunghezza sia costante; inoltre in prima
approssimazione non teniamo conto del fatto che l'avvolgimento del solenoide ha
un andamento a spirale ma immaginiamo che ciascuna spira del
22
MAGNETOSTATICA NEL VUOTO
[CAP. 8
solenoide sia piana ; ciò ci permette di trattare il solenoide come formato da una
successione di spire piane tra loro parallele tutte percorse dalla stessa corrente.
Quest'ultima ipotesi rende possibile il calcolo del valore della induzione
magnetica B generata lungo l'asse da un solenoide percorso da corrente
utilizzando l'espressione (8.63).
FIG. 8.9
- Solenoide.
Prendiamo in esame in particolare un solenoide di lunghezza l, formato da N
spire per unità di lunghezza, di raggio R, percorse da una corrente stazionaria l.
L'asse del solenoide sia orientato parallelamente all'asse z di un sistema di
riferimento cartesiano avente l'origine ad una estremità dell'avvolgimento.
Indichiamo con z la posizione del punto P, nel quale vogliamo calcolare il
vettore B e con z′ la posizione, variabile tra O ed l, di una generica spira del
solenoide. Supponiamo di scomporre il solenoide in tratti di lunghezza
infinitesima dz' ognuno dei quali contenente un numero di spire pari a N dz'. Il
contributo al vettore B dato nel punto P dalle spire contenute nell'elemento dz',
caratterizzato dal valore z' della coordinata, per la (8.62) è:
(8.64)
Come è possibile verificare per mezzo della Fig. 8.10 valgono le relazioni:
(8.65a)
(8.65b)
Sostituendo le (8.65) nella (8.64) si ha che:
(8.66)
ed integrando su tutto il solenoide, cioè tra ϑ1 e ϑ2, cosi come sono indicati in
Fig. 8.10, si ottiene:
(8.67)
8.8]
MAGNETOSTATICA NEL VUOTO
23
FIG. 8.10 - Calcolo del campo magnetico assiale di un solenoide.
Se la lunghezza del solenoide è molto maggiore del diametro delle spire che
lo compongono si può adottare la cosiddetta approssimazione di solenoide
infinito; in questa approssimazione si pone ϑ1 =0 e ϑ2 = π e per un punto P, che
non sia troppo vicino ai bordi del solenoide, si ricava dalla relazione (8.67) il
valore:
B = μ0 IN.
(8.68)
Ovviamente il vettore B sull'asse del solenoide, essendo generato da una
successione di spire piane, risulta parallelo all'asse z, mentre nei punti al di fuori
dell'asse ha l'andamento mostrato in Fig. 8.11 dove sono riportate le linee di
FIG. 8.11
- Linee di forza di B in un solenoide.
forza di B relative ad un solenoide sufficientemente lungo e sottile da poter essere
considerato infinito. È interessante notare come nella regione centrale di un tale
solenoide il vettore B risulti pressocché parallelo all'asse del cilindro anche in punti
che si discostano dall'asse. In Fig. 8.11 sono disegnate anche alcune linee
24
MAGNETOSTATICA NEL VUOTO
[CAP. 8
di forza di B esterne al solenoide ; si può notare come la superficie formata dalle
spire percorse da corrente costituisca una discontinuità per il vettore B. In effetti
se tracciassimo le linee di forza in prossimità del filo di una singola spira non
troveremmo variazioni così nette ma scopriremmo che esse hanno un andamento
piuttosto complicato e continuo all'intorno dei fili.
In Fig. 8.12 è mostrato l'andamento del valore del vettore induzione
magnetica sull'asse di un solenoide la cui lunghezza l è di 100 cm e il raggio R
di 10 cm.
FIG. 8.12 - Andamento di B lungo l'asse di un solenoide con l/R = 10.
In ordinate è riportato il valore di B normalizzato al valore B0 di un solenoide
infinito di uguali caratteristiche. Come si può notare dalla figura il modulo di B,
nell'intervallo che va dal centro del solenoide fino ad un punto corrispondente a
circa 4 volte la lunghezza del raggio delle spire, è uniforme entro il 4%. Inoltre
il valore di B al centro del solenoide risulta inferiore a quello che si avrebbe in
un solenoide infinito di ugual numero di spire per unità di lunghezza, con lo
stesso raggio, e che fosse percorso dalla stessa corrente I.
8.9 Forze agenti tra due circuiti percorsi da corrente
In questo paragrafo ci proponiamo di calcolare la forza che un circuito C1 di
forma qualsiasi percorso da una corrente I1 esercita su un altro circuito C2
percorso da una corrente I2. Un elemento dl2 del secondo circuito, posto a
distanza r dall'origine delle coordinate, subisce da parte del campo magnetico
generato in quel punto dal primo circuito una forza che per la seconda formula
di Laplace risulta essere:
dF = I2 (dl2 × B (r)).
(8.69).
8.9]
FORZE AGENTI TRA DUE CIRCUITI PERCORSI DA CORRENTE
25
Il vettore induzione magnetica B (r) prodotto dal primo circuito nel punto r
può essere a sua volta calcolato per mezzo della prima formula di Laplace. La
forza complessiva agente sul secondo circuito si ottiene allora integrando la
(8.69) lungo la linea C2, ossia:
(8.70)
Questa relazione, che rappresenta l'espressione matematica relativa ad una
delle prime esperienze di Ampère, risolve in linea di principio il problema che
FIG. 8.13 - Interazione magnetica tra due circuiti percorsi da corrente.
ci eravamo posti, anche se in pratica per circuiti di forma generica il calcolo degli
integrali che in essa compaiono può risultare tutt'altro che semplice.
Come applicazione particolare della (8.70) consideriamo il caso di due fili
rettilinei ed indefiniti, percorsi dalla corrente I1 e I2, posti ad una distanza a.
FIG. 8.14 - Il campo magnetico B generato dalla corrente I1 esercita una forza dF
sull'elemento dl2 percorso dalla corrente I2.
Scegliamo un sistema di riferimento, come mostrato in Fig. 8.14, tale che il
primo filo giaccia lungo l'asse z ed il secondo, ad esso parallelo, passi per il punto
x = 0, y = a.
26
MAGNETOSTATICA NEL VUOTO
[CAP. 8
Il vettore B generato dalla corrente I1 in ogni punto del conduttore percorso da
I2 è quello dato dalla legge di Biot e Savart:
(8.71)
esso risulta avere verso antiparallelo a quello dell'asse x, in accordo col fatto che
le linee di forza di B sono delle circonferenze concentriche al filo rettilineo
percorse in verso antiorario rispetto ad un osservatore orientato nella direzione
della corrente. La forza esercitata dal campo magnetico generato dal primo filo su
un elementino dl2 = dl2k del secondo filo è quindi:
(8.72)
dove nell'ultimo passaggio è stato omesso l'indice 2 all'elemento di circuito. La
(8.72) ci mostra che la forza esercitata dal primo filo sul secondo, quando i fili
sono percorsi da correnti concordi, è diretta in verso antiparallelo all'asse y e cioè
che essa è attrattiva; in modo analogo si può vedere che la forza esercitantesi tra
due fili percorsi da correnti I1 e I2 fra loro discordi ha lo stesso modulo del caso
precedente ma è repulsiva.
Dalla (8.72) mediante integrazione è possibile ottenere la forza che si esercita
su un tratto finito di lunghezza l del secondo filo. Si ha:
(8.73)
Ricordando che μ0 = 4π × 10-7 (newton/ampere2), da questa espressione si
ricava che tra due fili posti ad un metro di distanza e percorsi ciascuno da una
corrente di 1 ampere, si esercita una forza per unità di lunghezza di 2⋅10-7 newton.
Si può quindi dare una definizione di ampere, basandosi sulla relazione (8.73),
che introduca solo grandezze meccaniche.
8.10 Potenziale scalare magnetico
Vogliamo ora esaminare se sia possibile ricavare per il vettore induzione
magnetica B una relazione simile alla (2.19) trovata per il campo elettrostatico, e
cioè se sia possibile scrivere il vettore B come gradiente di un certo potenziale
scalare, vale a dire:
B = - μo grad ϕm .
(8.74)
Apparirà chiaro in seguito perché è stata introdotta a priori in questa
espressione la quantità μ0, che formalmente non trova corrispondenza nella
relativa formula del campo elettrostatico.
8.10]
POTENZIALE SCALARE MAGNETICO
27
Ammettendo per ipotesi che la (8.74) sia valida, cerchiamo di determinare la
funzione ϕm nel caso di un campo magnetico generato da una spira piana C
percorsa da una corrente I. Il vettore induzione magnetica B, generato in un punto
P, è dato dalla espressione (8.54), dove l'integrale è esteso a tutto il circuito
chiuso C. Se operiamo uno spostamento del punto P di una quantità infinitesima
arbitraria ds, come mostrato in Fig. 8.15, il potenziale ϕm subisce
FIG. 8.15 - Metodo per derivare il potenziale scalare magnetico.
una variazione dϕm che, per la relazione (1.26), è uguale a:
(8.75)
Se nella (8.75) introduciamo l'espressione di B data dalla prima formula di
Laplace (8.54) otteniamo la relazione:
(8.76)
dove ds è stato portato sotto segno di integrale, trattandosi di una quantità
costante, e con r si è indicata la distanza tra il generico elemento dl della spira e il
punto P.
È possibile ovviamente ottenere la stessa variazione del potenziale dϕm
tenendo fisso il punto P e facendo subire alla spira C uno spostamento - ds. Per
effetto di questo spostamento l'elemento dl descrive una superficie elementare da
di area uguale al modulo del vettore (ds × dl). Utilizzando la regola (1.15) del
triplo prodotto misto possiamo scrivere per il numeratore dell'integrando
dell'espressione (8.76) :
(8.77)
La quantità - r ⋅ (ds × dl) rappresenta il prodotto tra la proiezione dell'area da
in un piano perpendicolare ad r ed r. Pertanto avremo che l'integrale che
28
MAGNETOSTATICA NEL VUOTO
[CAP. 8
compare nella (8.76) non è altro che la variazione dω dell'angolo solido prodotta
dallo spostamento ds del punto P:
(8.78)
La variazione di potenziale dϕm diviene quindi:
(8.79)
e il potenziale scalare magnetico generato in P dalla spira è perciò:
(8.80)
dove ω rappresenta l'angolo solido sotteso tra P e tutta la spira C.
Si suddivida ora la superficie S delimitata dalla spira C in tanti elementi di area
da. Tali elementi possono essere riguardati come piccole spire percorse, tutte
nello stesso verso, da una corrente I lungo i loro bordi, come mostrato in Fig.
8.16.
FIG. 8.16
- Spira finita di corrente suddivisa in un insieme di spire elementari.
Poiché ogni coppia di spire adiacenti ha in comune un tratto percorso dalla
stessa corrente I con verso opposto, la somma di tutte le correnti delle spire
contenute nella superficie S fornisce una sola corrente, diversa da zero, ed uguale
ad I, che fluisce lungo il bordo esterno di S, che coincide con il circuito C di
partenza. Ad ogni elemento di superficie possiamo inoltre associare un versore n
diretto normalmente a da e con un verso tale che un osservatore orientato nello
stesso modo vedrebbe la corrente fluire lungo il bordo di da in verso antiorario.
Nel caso di Fig. 8.16 n ha la direzione uscente dal foglio. Indichiamo poi con da
la quantità vettoriale da n.
Poiché per definizione si ha che nel punto P:
(8.81)
8.11]
LEGGE DELLA CIRCUITAZIONE DI AMPÈRE
29
possiamo scrivere che per il potenziale magnetico vale la seguente espressione:
(8.82)
Nel paragrafo 8.4 abbiamo definito mediante la relazione (8.18) il momento
magnetico dm = I da n di una spira elementare di superficie da percorsa da una
corrente I. Tenendo conto di questa definizione la (8.82) diviene:
(8.83)
l'integrale essendo esteso alla superficie della spira.
Nel caso che il punto P, in cui si vuole calcolare il campo, sia ad una distanza
molto maggiore delle dimensioni lineari della spira, di modo che la spira possa
essere considerata molto piccola, la (8.83) può essere approssimata (1) dalla
relazione :
(8.84)
dove m = SI n.
D'altra parte tale espressione risulta valida anche per un aghetto magnetico di
momento magnetico m. Possiamo così enunciare la seconda parte del principio di
equivalenza tra spire percorse da corrente e aghetti magnetici, a completamento di
quanto già detto nel paragrafo 8.5 riguardo alle azioni meccaniche che un campo
magnetico esercita su spire ed aghi magnetici. La relazione (8.84) ci permette
infatti di affermare che il campo magnetico generato da una spira di superficie S
percorsa da corrente I, in punti lontani dalla spira, è uguale al campo magnetico
generato da un ago magnetico di momento magnetico m, purché esso abbia un
valore m = IS n, sia cioè uguale al momento magnetico della spira. In altre parole
ago magnetico e spira percorsa da corrente, caratterizzati dallo stesso valore del
momento magnetico m, sono equivalenti per quanto riguarda il campo magnetico
da essi generato in un punto dello spazio.
8.11 Legge della circuitazione di Ampère
Abbiamo mostrato che il vettore B analogamente al campo elettrostatico, può
essere rappresentato come gradiente di una funzione scalare ϕm, cui è stato dato il
nome di funzione potenziale scalare magnetico. A differenza del potenziale
(1) È possibile dimostrare, sviluppando particolareggiatamente il calcolo, che tale
approssimazione è analoga a quella introdotta nella determinazione del potenziale elettrostatico generato da un dipolo elettrico.
30
MAGNETOSTATICA NEL VUOTO
[CAP. 8
elettrostatico, il potenziale magnetico ϕm non è però una funzione del punto ad un
solo valore, perché tale non è l'angolo solido ω che compare nella espressione
(8.80).
Per giustificare questa affermazione cominciamo con il far notare che nel
calcolo che ha portato alla definizione di ϕm il segno è stato determinato dalla
scelta del verso, fatta secondo la convenzione introdotta nel paragrafo 8.4, del
versore n normale al piano della spira. Questo fa si che lo spazio circostante la
spira possa essere suddiviso in due semispazi rispetto al piano in cui giace il
circuito; uno dei quali, quello contenente il punto P nel nostro esempio di Fig. 8.17,
verrà indicato come semispazio positivo e l'altro, quello opposto, come semispazio
negativo.
FIG. 8.17 - Angolo solido sotteso in P da una spira di corrente. La direzione di n indica
il semispazio positivo.
Aggiungiamo inoltre che l'angolo solido ω, sotteso dalla spira in P, e dato dalla
(8.81), è l'angolo solido interno. Con riferimento all'esempio di Fig. 8.17 parleremo
quindi d'ora in avanti in corrispondenza al semispazio a destra della spira, quello
positivo, di angolo solido positivo quando considereremo l'angolo solido interno, e
di angolo solido negativo quando considereremo quello esterno. Nel caso di un
punto contenuto nel semispazio negativo l'angolo solido positivo sarà quello
esterno e l'angolo solido negativo quello interno. Evidentemente se si inverte il
verso di percorrenza della corrente I lungo la spira bisogna di conseguenza
modificare quanto è stato detto, scambiando i due semispazi.
8.18 - Andamento dell'angolo solido positivo ω al variare del punto P dal
semispazio positivo a quello negativo, passando attraverso la spira di corrente.
FIG.
Muoviamo ora il punto P nel semispazio positivo e facciamo tendere all'infinito
la sua distanza dalla spira; l'angolo solido sotteso in P dalla spira, assume valori
sempre più piccoli fino a divenire nullo. Se invece avviciniamo il punto
8.11]
LEGGE DELLA CIRCUITAZIONE DI AMPÈRE
31
al piano della spira, l'angolo ω continua ad aumentare, trasformandosi con
continuità in quello esterno, ed al tendere del punto all'infinito nel semispazio
negativo tende a 4π. L'andamento dell'angolo solido positivo al variare di P da + ∞
a -∞ passando attraverso la spira è quello mostrato in Fig. 8.18. D'altra parte
possiamo sempre far percorrere al punto P un cammino, come ad esempio quello
mostrato in Fig. 8.19, che partendo dal semispazio positivo
FIG. 8.19 - Andamento dell'angolo solido ω per spostamenti del punto P intorno alla spira.
In P1 e P2 l'angolo solido è positivo, in P3 e P4 l'angolo solido è negativo.
a destra, giri intorno alla spira ed arrivi nel semispazio negativo a sinistra. In questo
caso l'angolo solido parte da un valore positivo ω, diviene nullo quando il punto P
si trova nello stesso piano della spira, e poi, essendo l'angolo solido una funzione
continua del punto, assume valori negativi via via crescenti e tendenti al valore di
-2π, che è raggiunto quando il punto giunge nel piano della spira, muovendosi nel
semispazio negativo.
Se il punto ora attraversa il piano della spira, passando così dal semispazio
negativo a quello positivo, l'angolo solido da considerare è quello esterno che nel
semispazio positivo è quello che abbiamo definito come negativo. Ritornando così
nel punto di partenza, l'angolo solido ha assunto il valore (ω - 4π). Da tutto ciò
concludiamo che l'angolo solido, e quindi il potenziale scalare magnetico, non è
una funzione del punto ad un solo valore. Se infatti il punto P compie una serie di n
cammini che attraversano la spira, il valore dell'angolo solido sotteso in P varia e
diviene uguale a ω ± n 4π dove il segno dipende dal verso di percorrenza dei
cammini intorno alla spira (1). Risulta inoltre evidente che se il cammino chiuso
percorso dal punto P non attraversa la superficie della spira la variazione
dell'angolo solido è nulla.
(1) In particolare, secondo le convenzioni da noi fatte, bisogna considerare il segno meno
quando il cammino compiuto dal punto intorno alla spira viene percorso nello stesso verso
dalle linee di forza del vettore B generato dalla spira.
32
MAGNETOSTATICA NEL VUOTO
[CAP. 8
Consideriamo un circuito percorso da una corrente I ed eseguiamo la
circuitazione del vettore B lungo una linea chiusa qualsiasi che supponiamo concatenata con il circuito; assumeremo come verso di percorrenza di questa linea quello
concorde con il verso della linea di forza di B generato dalla corrente I. Tenendo
conto della relazione B = - μ0 grad ϕm e delle proprietà dell'operatore gradiente si
ha che:
(8.85)
Nella (8.85) dl sta ad indicare un tratto infinitesimo della linea chiusa che
concatena il circuito e Δϕm la variazione che il potenziale scalare magnetico
subisce lungo il cammino chiuso considerato.
FIG.
8.20 - Corrente I concatenata dalla linea C. Il verso di percorrenza di C indicato è
quello positivo.
La differenza fondamentale tra la (8.85) e la relazione analoga ricavata per
l'elettrostatica stà proprio nel fatto che la variazione del potenziale scalare magnetico non è nulla lungo il cammino chiuso da noi scelto ma è proporzionale alla
variazione dell'angolo solido, che come abbiamo dimostrato, per un cammino
chiuso concatenato una sola volta con il circuito, è uguale a ± 4π. Allora, per la
definizione del potenziale scalare magnetico, e poiché nel nostro caso Δω = - 4π, si
ha:
(8.86)
e quindi:
(8.87)
Se la linea concatena il circuito n volte la (8.87) diviene:
(8.88)
Nel caso in cui la linea chiusa lungo la quale viene calcolata la circuitazione di B
non concateni alcun circuito percorso da corrente avremo che la variazione
8.12]
IL FLUSSO DI B
33
di ω lungo tale linea è nulla, risulta dunque nulla la variazione del potenziale
scalare magnetico e di conseguenza anche la circuitazione di B. Le relazioni (8.87)
e (8.88) prendono il nome di legge della circuitazione di Ampère.
In maniera analoga a quanto fatto per il potenziale elettrico anche il potenziale
magnetico ϕm può essere definito in un punto P mediante l'espressione:
(8.89)
scegliendo per convenzione il punto di riferimento (in cui il potenziale è nullo)
all'infinito. Osserviamo però nuovamente che il valore fornito dalla (8.89) non è
unico perché dipende dal fatto che il cammino scelto per andare da P all'infinito
concateni o no il circuito percorso da corrente. Rappresentando la corrente I che
compare nella (8.87) mediante la densità di corrente J, cioè
(8.90)
possiamo porre la legge della circuitazione di Ampère nella forma:
(8.91)
dove S è una superficie aperta qualsiasi che ha come contorno la linea chiusa C.
Applicando all'integrale di sinistra il teorema di Stokes otteniamo:
(8.92)
e poiché la (8.92) deve essere valida qualunque sia la superficie di integrazione S, si
ricava che:
rot B = μ0 J
(8.93)
che rappresenta il teorema di Ampère in forma differenziale. È possibile notare
dalla (8.93) che il vettore B risulta irrotazionale in tutti i punti dello spazio dove J è
nullo, dove cioè non esiste passaggio di corrente. Questo è ovviamente in accordo
con quanto detto finora sull'esistenza di un potenziale magnetico scalare che per la
(8.89) è univocamente determinato solo in quelle regioni dello spazio che non
contengono circuiti percorsi da corrente.
8.12
Il flusso di B
Esaminando attentamente quanto esposto nei paragrafi dedicati alla legge di Biot
e Savart e alle applicazioni della prima formula di Laplace, si può notare
34
MAGNETOSTATICA NEL VUOTO
[CAP. 8
che in tutti gli esempi riportati si è arrivati alla conclusione che le linee di forza di
B o sono linee chiuse, o vanno all'infinito o ne provengono.
Più in generale si nota che per il campo magnetico, a differenza di quanto
accade per il campo elettrico, non esistono punti di accumulazione delle linee di
forza ; ciò significa che il campo vettoriale B non presenta punti sorgenti del
campo. Prendiamo allora in esame una superficie chiusa S in una regione dello
spazio ove esista un campo magnetico e applichiamo le considerazioni illustrate
nel paragrafo 1.5 relative alla relazione tra numero di linee di forza di un campo
vettoriale che attraversano una superficie chiusa e valore del flusso del campo
vettoriale attraverso la stessa superficie. Poiché le linee di forza di B sono o linee
chiuse o linee che vanno all'infinito o ne provengono, si ha che attraverso la
superficie chiusa S il numero di linee di forza entranti è uguale al numero di linee
di forza uscenti: la loro somma algebrica è quindi nulla. In altre parole all'interno
di S, come già detto, non esistono sorgenti del campo e quindi il flusso di B
attraverso S deve essere nullo. Possiamo cioè scrivere che:
(8.94)
e affermare che il campo magnetico è un campo vettoriale solenoidale. Questa
affermazione potrebbe essere contraddetta solo qualora fosse possibile isolare
delle cariche magnetiche libere, cosa che fino ad ora non è avvenuta nonostante i
tentativi fatti da numerosi ricercatori. Utilizzando nella (8.94) il teorema della
divergenza otteniamo che:
div B = 0
(8.95)
valida in ogni punto dello spazio.
Applicando l'operatore divergenza alla relazione (8.55) è possibile verificare
con un calcolo diretto che:
(8.96)
La proprietà (8.95) è cioè sempre soddisfatta qualunque siano le distribuzioni
di corrente che generano il campo B.
Le due relazioni rot B = μ0 J e div B = 0 permettono di definire in maniera
completa il vettore induzione magnetica nel caso di campi magnetici generati nel
vuoto da generiche distribuzioni di correnti.
8.13 Potenziale vettore magnetico
Nella trattazione del campo magnetico è possibile introdurre, accanto al
potenziale scalare, funzione del punto a più valori, anche un potenziale vettore,
funzione ad un solo valore. Tale potenziale rappresenta uno strumento
estremamente
8.14]
POTENZIALE VETTORE MAGNETICO
35
valido nella descrizione delle proprietà fondamentali dell'elettromagnetismo.
Infatti dalla relazione (8.95) discende, per un noto teorema di calcolo vettoriale,
l'esistenza di un vettore A tale che:
B = rot A
(8.97)
Il vettore A prende il nome di potenziale vettore magnetico. Si noti che la
(8.97) non è sufficiente per definire completamente il vettore A; si può vedere
infatti che aggiungendo ad A il gradiente di una qualsiasi funzione scalare ψ si
ottiene ancora:
rot (A + grad ψ ) = rot A .
(8.98)
È necessaria allora una ulteriore condizione per A. Assumeremo che nel caso
della magnetostatica, cioè in assenza di campi magnetici variabili col tempo, essa
sia la seguente:
div A = 0 .
(8.99)
È interessante poter disporre di una espressione che leghi il potenziale vettore
A alle correnti, o densità di correnti, che sono responsabili dell'esistenza del
campo magnetico. A tal fine prendiamo in esame la relazione:
rot B = μ0 J
(8.100)
sostituiamo a B la (8.97) ed eseguiamo il rotore del rotore ricordando che div A =
0. Abbiamo così che:
rot rot A= -∇2 A = μ0 J
(8.101)
Se confrontiamo questa equazione con quella di Poisson (3.5) valida in
elettrostatica, notiamo che esse sono formalmente identiche eccetto per il fatto che
nella (8.101) compaiono grandezze vettoriali anziché scalari. Ciò non costituisce
una difficoltà perché sappiamo che ciascuna delle componenti di A deve
soddisfare separatamente l'equazione (8.101). Siamo così in grado di scrivere per
ogni componente di A una soluzione del tipo della (3.6), per cui, combinandole in
forma vettoriale, troviamo in definitiva che:
(8.102)
8.14 Potenziale vettore magnetico generato da una spira percorsa da corrente
La determinazione mediante la (8.102) del potenziale vettore magnetico A
presenta in generale maggiori difficoltà di quelle che si incontrano nel calcolo
36
MAGNETOSTATICA NEL VUOTO
[CAP. 8
del potenziale scalare ϕm e per questo motivo ci limiteremo al semplice calcolo del
potenziale A generato da una spira percorsa da corrente. Sia data una spira circolare
di raggio r' percorsa da una corrente stazionaria I. Assumiamo una terna di assi
cartesiani con l'asse z perpendicolare al piano contenente la spira, come mostrato in
Fig. 8.21, e con l'origine delle coordinate coincidente con il centro della spira.
FIG. 8.21 -
Calcolo del potenziale vettore magnetico nel caso di una spira circolare.
Poiché J dυ' = I dl', dove dl' rappresenta un elemento infinitesimo della spira, la
(8.102) diviene:
(8.103)
l'integrale essendo esteso a tutta la spira. Consideriamo il punto P, distante r
dall'origine O, caratterizzato dalle coordinate x, y, z. Dato che la spira giace nel piano
z = 0, la componente del potenziale vettore lungo l'asse z, Az, è nulla.
La quantità |r - r'| -1 può essere scritta nella forma:
(8.104)
dove ϑ rappresenta l'angolo formato tra il vettore r' e l'asse y.
Se prendiamo in esame un punto P (x, y, z) posto ad una distanza dall'origine
molto maggiore delle dimensioni della spira, tale cioè che r » r', possiamo sviluppare
la (8.104) in serie di potenze di r' / r ed ottenere, limitandoci ai termini del primo
ordine:
8.14]
POTENZIALE VETTORE MAGNETICO
37
(8.105)
Sostituendo la (8.105) nella (8.103) e tenendo conto che:
dl' = - (r' dϑ cos ϑ i + r' dϑ sen ϑj)
(8.106)
le componenti lungo l'asse x e l'asse y del potenziale vettore A risultano essere :
Date le espressioni (8.107) unitamente al fatto che Az = 0, la forma vettoriale
di A risulta allora essere:
(8.108)
dove m = (πr'2) In rappresenta il momento magnetico della spira secondo la
definizione (8.21) essendo (πr'2) la superficie S delimitata dalla spira ed n un
versore orientato parallelamente all'asse z di Fig. 8.21.
9
Magnetostatica nei mezzi materiali
9.1 Introduzione
Nel capitolo precedente abbiamo discusso i fenomeni magnetici dovuti a
correnti stazionarie circolanti in fili conduttori posti nel vuoto e abbiamo dedotto
le relazioni fondamentali che permettono di determinare in ogni punto dello
spazio il campo magnetico generato da tali correnti. In questo capitolo indagheremo invece su quanto avviene quando i fili percorsi da corrente stazionaria si
trovino in presenza di mezzi materiali. L'esperienza insegna che quando certi
materiali vengono posti in un campo magnetico essi acquistano delle proprietà
che in generale prima non possedevano e che a loro volta tali materiali, così
modificati, sono in grado di influenzare il campo magnetico esterno : i materiali
che presentano tale comportamento sono detti magnetizzati. Ci proponiamo di
sviluppare in questo capitolo una teoria macroscopica dei materiali magnetizzati,
seguendo una linea del tutto simile a quella utilizzata nel caso della discussione
dei materiali polarizzati elettricamente, al fine di ricavare delle espressioni che
siano in grado di fornire il valore del campo magnetico in ogni punto dello spazio
in presenza e di correnti stazionarie e di materiali magnetizzati.
9.2 Correnti atomiche e vettore di magnetizzazione
Uno dei risultati più interessanti a cui siamo arrivati discutendo la
magnetostatica nel vuoto è la dimostrazione che una piccola spira percorsa da
corrente è caratterizzabile mediante un momento magnetico e che per quanto
riguarda i
40
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
fenomeni magnetici ad essa connessi è del tutto equivalente ad un piccolo ago di
materiale magnetizzato avente un uguale momento magnetico. Furono
constatazioni di questo genere che diedero ad Ampère già nel secolo scorso lo
spunto per la soluzione del problema del magnetismo prodotto da mezzi materiali.
Egli infatti avanzò l'ipotesi che l'origine di ogni specie di magnetismo nella
materia fosse da ricondursi a piccole correnti circolanti in essa e associate agli
atomi dei materiali. L'interpretazione moderna del magnetismo nella materia
rimane essenzialmente quella di Ampère. Oggi sappiamo infatti che ogni atomo
contiene degli elettroni che percorrono delle orbite intorno al nucleo in maniera
simile a quanto avviene in un sistema planetario. Se pensiamo di rappresentare la
carica dell'elettrone, invece che concentrata in una particella, distribuita lungo
tutta l'orbita (il che è giustificato dal modello di atomo fornito dall'odierna teoria
quantistica) possiamo riguardare il moto orbitale dell'elettrone come una piccola
spira di dimensioni atomiche percorsa da un'opportuna corrente stazionaria. Ciò
determina l'esistenza di un momento magnetico (detto orbitale). A questo va
aggiunto inoltre che l'elettrone possiede, come abbiamo visto nel paragrafo 6.2,
oltre al momento magnetico orbitale un momento magnetico intrinseco, associato
al suo spin, che in un modello intuitivo dell'elettrone stesso può essere pensato
come dovuto a un suo moto di rotazione attorno al proprio asse. Anche il
momento magnetico intrinseco è dunque, in ultima analisi, riconducibile a un
microscopico anello di corrente.
Giungiamo così a riconoscere che ogni atomo di un materiale qualsiasi
contiene delle correnti circolanti che generalmente vengono indicate con il nome
di correnti atomiche.
Per quanto riguarda tutti gli effetti magnetici, ciascuna spira percorsa da
corrente atomica può essere rappresentata mediante un momento di dipolo
magnetico e pertanto il campo magnetico generato da un atomo in un punto posto
a grande distanza rispetto alle dimensioni atomiche è in prima approssimazione
quello dovuto ad un momento di dipolo magnetico, trascurando, come abbiamo
fatto nel caso della polarizzazione elettrica, i termini associati a poli di ordine
superiore.
Associando così ad ogni atomo un momento di dipolo magnetico m possiamo
definire un vettore macroscopico M, detto intensità di magnetizzazione, o più
semplicemente magnetizzazione del mezzo, dato da:
(9.1)
dove la sommatoria è estesa a tutti i momenti di dipolo magnetico contenuti nel
volume Δ V, con Δ V che tende macroscopicamente a zero. Questo significa, come
abbiamo già avuto occasione di dire, che Δ V deve essere sufficientemente piccolo
da ridursi su scala macroscopica praticamente a un punto e sufficientemente
grande da contenere un numero tale di dipoli magnetici per cui abbia senso
considerare una media statistica, in modo che la funzione M (x, y, z) non vari
bruscamente passando da un punto all'altro ed il mezzo possa essere considerato
come un continuo. Il vettore M ha le dimensioni di un momento
9.3]
CORRENTE DI MAGNETIZZAZIONE
41
magnetico per unità di volume e nel sistema MKS viene misurato in ampere/
metro.
Nel caso in cui il materiale non sia soggetto ad un campo magnetico esterno non
esiste alcun motivo per supporre che le correnti atomiche circolino tutte nello stesso
verso e soprattutto che ruotino tutte intorno alla stessa direzione. In altre parole
possiamo supporre che normalmente in un materiale, in assenza di campo
magnetico, i singoli momenti di dipolo magnetico sono orientati in maniera del
tutto casuale. Da questo consegue che la sommatoria vettoriale che compare nella
(9.1) risulta in tal caso uguale a zero e che il vettore di magnetizzazione è pertanto
nullo e nulli sono di conseguenza gli effetti magnetici. L'applicazione di un campo
magnetico produce quella che abbiamo chiamata la magnetizzazione del mezzo e
che rappresentiamo associando ad ogni elemento di volume un momento di dipolo
magnetico che non è necessariamente uniforme in tutto il materiale e che
generalmente è proporzionale al campo magnetico esterno.
Il momento magnetico per unità di volume sorge per effetto dell'azione del
campo magnetico applicato che, tramite una coppia di forze, tende a disporre le
spire elementari percorse dalle correnti atomiche in un piano perpendicolare alla
sua direzione o in altri termini ad orientare i dipoli magnetici atomici
parallelamente a se stesso. Secondo la (9.1) il valore di M è allora uguale al
prodotto del numero di dipoli magnetici, contenuti nell'unità di volume, per il
valore del momento magnetico di ciascun dipolo.
Ci proponiamo in questo capitolo di ricavare l'espressione del campo magnetico
prodotto da un materiale magnetizzato caratterizzato dalla quantità macroscopica
M, tralasciando ogni considerazione sulle cause della magnetizzazione e su come
possa essere determinato da un punto di vista microscopico il valore del momento
magnetico di ciascun atomo. Questo ultimo problema costituirà l'argomento del
capitolo successivo.
9.3 Corrente di magnetizzazione
Un materiale magnetizzato, per quanto detto, può quindi essere riguardato o
come un insieme di correnti atomiche o come un insieme di dipoli magnetici più o
meno ordinati. Per quanto riguarda le correnti atomiche è possibile dimostrare che
esse si combinano in scala macroscopica per dar luogo ad una corrente, detta di
magnetizzazione.
Assumendo invece il secondo tipo di schematizzazione, quello dei dipoli
magnetici, formalmente del tutto simile a quello utilizzato nella trattazione dei
dielettrici polarizzati, siamo indotti a ritenere che sia possibile definire delle densità
fittizie di cariche magnetiche mediante le quali giustificare gli effetti prodotti dai
materiali magnetizzati. Questa supposizione non deve d'altra parte sorprendere
perché già nel paragrafo 8.5 abbiamo mostrato come una spira percorsa da corrente
possa essere sostituita in maniera equivalente da una lamina magnetica sulle cui
faccie siano distribuite opportune densità superficiali di cariche magnetiche.
Ci troviamo così di fronte a due diverse possibili rappresentazioni atte ad
42
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
analizzare il comportamento di un materiale magnetizzato: la prima basata sul
concetto di densità di cariche o poli magnetici e quindi sull'utilizzo del potenziale
scalare per il calcolo del campo magnetico generato, la seconda basata invece sul
concetto di densità di corrente di magnetizzazione e quindi sull'utilizzo del
potenziale vettore magnetico. Come mostreremo, sia la densità di corrente di
magnetizzazione sia la densità di poli magnetici sono descrivibili in termini
dell'intensità di magnetizzazione M e delle sue derivate. È nostra intenzione
sviluppare dapprima la trattazione legata al concetto di corrente di
magnetizzazione per poi passare a quella fondata sul concetto di polo magnetico.
Consideriamo un pezzo di materiale magnetico come costituito da un certo
numero di spire elementari per unità di volume percorse tutte nello stesso verso e
intorno alla stessa direzione individuata da M, da correnti atomiche. Se l'intensità
di magnetizzazione del materiale è uniforme, il numero di spire per unità di
volume è allora costante e quindi all'interno del mezzo le correnti atomiche si
annullano l'una con l'altra perché, in maniera simile a quanto è mostrato in Fig.
8.16, tratti prossimi di due spire adiacenti sono percorsi dalla stessa quantità di
corrente in verso opposto. Sulle superficie del materiale, dove esiste una
discontinuità, le correnti atomiche danno origine invece ad una densità di corrente
che evidentemente ha un valore massimo sulle superficie parallele ad M ed un
valore nullo su quelle perpendicolari ad M.
FIG. 9.1
- Cilindro di materiale uniformemente magnetizzato.
Un esempio che illustra un comportamento di questo genere è riportato in Fig.
9.1 dove è mostrato un cilindro di materiale uniformemente magnetizzato con
l'asse parallelo alla direzione di M. È facile constatare, considerando per esempio
le spire disegnate su una base del cilindro, come le correnti atomiche, che
circolano su piani perpendicolari all'asse del cilindro, essendo distribuite
uniformemente si annullino ovunque completamente eccetto che sulla superficie
cilindrica laterale, parallela ad M, dove si compongono generando una corrente
che si avvolge azimutalmente.
Se la magnetizzazione M del materiale non è uniforme l'annullamento delle
correnti atomiche non è completo all'interno del corpo ed esiste, oltre alla
corrente superficiale, anche una corrente macroscopica non nulla che fluisce nel
mezzo. In Fig. 9.2 sono rappresentate le spire delle correnti atomiche situate su un
piano interno ad un materiale non uniformemente magnetizzato. Se prendiamo in
esame la zona compresa tra le due linee l1 ed l2, notiamo che la quantità di carica
che va dal basso verso l'alto è maggiore di quella che va in verso opposto e questo
ci porta a concludere che, anche senza trasporto di cariche, esiste nel mezzo una
corrente diretta verso l'alto: questa corrente unitamente a quelle
9.3]
FIG. 9.2
CORRENTE DI MAGNETIZZAZIONE
43
- Correnti atomiche in un materiale magnetizzato non uniformemente.
superficiali formano quella che noi abbiamo chiamato la corrente di
magnetizzazione.
Per mettere in relazione la corrente di magnetizzazione con l'intensità di
magnetizzazione M operiamo nella seguente maniera. Dato un materiale che
supponiamo non uniformemente magnetizzato consideriamo al suo interno due
parallelepipedi elementari di volume rispettivamente dV1 e dV2 entrambi di lati
dx, dy, e dz e, come mostrato in Fig. 9.3 adiacenti lungo la direzione y.
FiG. 9.3 - Elementi di volume di un materiale magnetizzato non uniformemente.
Rappresentazione della magnetizzazione mediante correnti circolari.
Se al centro del volume dV1 l'intensità di magnetizzazione è M (x, y, z), al
centro del volume dV2 essa vale, a meno di infinitesimi di ordine superiore:
(9.2)
44
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
Consideriamo la componente Mx del vettore magnetizzazione; possiamo
associare al volumetto dV1 un momento mangetico con una componente parallela
all'asse x uguale a Mx dxdydz e immaginare che questa componente sia dovuta ad
una corrente che si avvolge sul piano perpendicolare ad Mx in verso antiorario
lungo una spira di superficie dydz. Per il volume dV1; ricordando la relazione m =
IS, questa corrente ha quindi una intensità :
(9.3)
e per il volume dV2 una intensità:
(9.4)
Sulla superficie di separazione dei due volumetti in direzione z fluisce pertanto
una corrente non nulla uguale a:
(9.5)
Se prendiamo in considerazione i due volumetti dVl e dV2 ancora adiacenti ma
questa volta lungo la direzione x, si può vedere che esiste un ulteriore contributo
alla corrente lungo z e precisamente quello dovuto alla corrente che fluisce sul
piano xz in una spira di superficie dxdz intorno alla direzione della componente
My del vettore magnetizzazione.
Ripetendo il calcolo precedente si troverebbe che questo contributo vale:
(9.6)
la corrente totale lungo z è quindi:
(9.7)
Dividendo quest'ultima espressione per il valore dell'area elementare dxdy
perpendicolare alla direzione della corrente Iz si ottiene:
(9.8)
che rappresenta la componente lungo z della densità di corrente di
magnetizzazione.
9.3]
CORRENTE DI MAGNETIZZAZIONE
45
Con lo stesso procedimento si possono ricavare anche le altre componenti della
densità di corrente Jm e riconoscere poi che ognuna di esse è uguale alla rispettiva
componente del vettore rot M. Si ha perciò:
Jm = rot M.
(9.9)
Segue immediatamente dalla (9.9) che se M è uniforme Jm è nulla nel materiale
ma non sulla superficie, dove esiste una discontinuità per M.
Per chiarire questo punto, riprendiamo in esame l'esempio di Fig. 9.1
supponendo che l'asse del cilindro sia diretto lungo z e che quindi Mx = My = 0 ed
MZ = M. Dalla (9.9) si deduce che:
(9.10)
Se la magnetizzazione è uniforme, cioè se M = cost, nel materiale Jm è nulla.
Sulla superficie laterale del cilindro tuttavia la magnetizzazione M subisce una
discontinuità passando dal valore M ad un valore mallo. Pertanto su questa
superficie si avvolge una corrente che, come risulta dalla (9.10), è azimutale intorno
alla direzione z come avevamo già dedotto con un ragionamento intuitivo.
Per ottenere l'espressione in funzione della magnetizzazione M di questa densità
di corrente superficiale, che indicheremo con Jsm, consideriamo la superficie di
separazione tra materiale magnetizzato e vuoto di Fig. 9.4, supponendo
FIG. 9.4
di M.
- La densità di corrente superficiale di magnetizzazione è uguale alla componente M1
46
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
che sia il vettore M sia la normale n alla superficie giacciono nel piano del foglio.
Dato allora il cammino chiuso C, calcoliamo il flusso di Jm attraverso la
superficie S da esso delimitato; per la (9.9) questo vale:
(9.11)
L'integrale a destra può essere trasformato mediante il teorema di Stokes, e
quindi:
(9.12)
La circuitazione di M, facendo tendere Δh a zero e supponendo M uniforme su
tutto il tratto Δl, è uguale a Mt, Δl, mentre il flusso di Jm, se la densità di corrente
superficiale è Jsm, risulta normale al piano del foglio e vale JsmΔl.Abbiamo
pertanto che:
Jsm = Mt
(9.13)
dove Mt, indica la componente di M tangente alla superficie di separazione tra il
materiale e il vuoto. In forma vettoriale, indicando n il vettore normale alla
superficie di separazione, la (9.13) si scrive:
Jsm = M × n.
(9.14)
La quantità Jsm ha le dimensioni di una corrente per unità di lunghezza.
9.4 Campo magnetico generato da un materiale magnetizzato.
Rappresentazione mediante correnti di magnetizzazione
Per quanto mostrato nel paragrafo 8.13 il vettore induzione magnetica B si
ottiene eseguendo il rotore del potenziale vettore magnetico A. Nel caso di una
spira percorsa da corrente di momento magnetico m il potenziale vettore generato
in un punto r posto a grande distanza è:
(9.15)
Poiché ad ogni elemento di volume di un materiale magnetizzato con intensità
M possiamo attribuire un momento magnetico:
(9.16)
dove con r' indichiamo il raggio vettore, spiccato dall'origine delle coordinate,
che individua il volumetto infinitesimo Δυ', abbiamo che il potenziale vettore
9.4]
CAMPO MAGNETICO GENERATO DA UN MATERIALE
47
A generato in un punto r da un materiale magnetizzato di volume V è:
(9.17)
Il vettore B può essere ottenuto applicando l'operatore rotore alla (9.17).
Ricordando che
con grad' che opera sulle coordinate
(x', y', z'), la (9.17) diviene:
(9.18)
Utilizzando la seguente relazione vettoriale, riportata in tabella 1.1, rot' ϕM =
= ϕ rot' M - M × grad' ϕ con
si ha, sostituendo nella (9.18),
(9.19)
Il secondo integrale a destra può essere trasformato in un integrale superficiale
mediante relazioni del tipo (1.41), ottenendo in tal modo:
(9.20)
Tenendo conto della (9.9) e della (9.14) abbiamo infine che:
(9.21)
Quest'ultima espressione, valida per tutti i punti dello spazio interni ed esterni
del materiale, mostra come il potenziale vettore magnetico generato da correnti di
magnetizzazione abbia la stessa forma di quello creato da correnti di conduzione.
Il problema di determinare l'espressione della induzione magnetica B dovuta ad un
volume di materiale magnetizzato si risolve completamente eseguendo il rotore
della (9.21). Tuttavia, per la complessità del calcolo del rotore di A, preferiamo
non procedere oltre su questa linea e riprendere l'argomento più avanti, dove sarà
affrontato utilizzando il concetto di poli magnetici.
48
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
9.5 Il vettore H. La legge della circuitazione di Ampère in presenza dei materiali
magnetizzati
Nel paragrafo 8.11 abbiamo dedotto la forma differenziale della legge di
circuitazione di Ampère : rot B = μ0 J. Alla luce dei risultati del paragrafo
precedente possiamo affermare che nel caso in cui il campo magnetico sia generato
oltre che da correnti che fluiscono in fili conduttori anche da materiali magnetizzati,
nell'equazione del rotore di B, dobbiamo considerare oltre alla densità di corrente di
conduzione J anche la densità di corrente di magnetizzazione Jm, e scrivere:
rot B = μ0 (J + Jm).
(9.22)
Poiché inoltre Jm = rot M possiamo trasformare la (9.22) nella seguente
maniera:
(9.23)
Introducendo un nuovo vettore H, detto vettore intensità magnetica, definito
come:
(9.24)
abbiamo che:
rot H=J.
(9.25)
Nel vuoto, dove il vettore magnetizzazione M è ovviamente nullo, la (9.24) si
riduce alla relazione B = μ0H che esprime una semplice proporzionalità tra il
vettore B ed il vettore H. Pertanto tutte le leggi della magnetostatica nel vuoto
ricavate nel capitolo 8 per il vettore B, valgono anche per il vettore H.
Calcolando il flusso di rot H attraverso una superfìcie S aperta, di contorno C,
per la (9.25) si ottiene:
Applicando il teorema di Stokes all'integrale a sinistra, si ha:
(9.26)
espressione che rappresenta la forma integrale del teorema della circuitazione di
Ampère nel caso in cui siano presenti oltre che correnti di conduzione anche
materiali magnetizzanti.
9.6]
LE EQUAZIONI DEL CAMPO
49
La ragione della comparsa del nuovo vettore H nella trattazione del
magnetismo dei mezzi materiali è analoga a quella che in elettrostatica aveva
portato, al termine della discussione del teorema di Gauss in presenza di dielettrici
polarizzati, ad introdurre il vettore D. In realtà, come abbiamo visto, per la
descrizione del magnetismo dei materiali sono sufficienti i due vettori B ed M ;
inoltre H, come appare chiaramente dalla (9.24) non è un vettore indipendente.
L'importanza tuttavia di questo vettore ausiliario è legata proprio alle espressioni
(9.25) e (9.26) e cioè al fatto che il suo rotore o la sua circuitazione dipendono
esclusivamente dalle correnti di conduzione senza esplicito riferimento alle
correnti di magnetizzazione.
La (9.25) e la (9.26) divengono cosi le espressioni più generali della legge di
Ampère, rispettivamente in forma differenziale ed integrale, valide sia nel vuoto
sia in presenza di materiali magnetizzati.
Il vettore H ha le stesse dimensioni del vettore M e cioè quelle di un momento
magnetico per unità di volume. Nel sistema MKS, come può ricavarsi anche dalla
espressione (9.26), l'unità di misura di H è l'ampere per metro.
9.6
Le equazioni del campo. Le condizioni al contorno di B ed H
Nel corso dell'esposizione delle principali proprietà che caratterizzano il
campo magnetostatico abbiamo avuto occasione di mostrare che il vettore B
generato nel vuoto da correnti di conduzione è un vettore solenoidale, cioè che :
div B = 0 .
(9.27)
Per quanto detto nel paragrafo 9.4, sappiamo d'altra parte che il campo
magnetico prodotto da materiali magnetizzati è deducibile schematizzando questi
ultimi mediante opportune distribuzioni di densità di corrente. Essendo pertanto in
ogni caso sorgenti del campo vettoriale B le correnti, o di conduzione o di
magnetizzazione, è lecito affermare che la (9.27) deve essere valida dovunque, e
quindi anche all'interno dei mezzi materiali.
Se teniamo conto inoltre dell'espressione a cui siamo giunti per il teorema della
circuitazione di Ampère in presenza di mezzi magnetizzati, possiamo concludere
che le equazioni fondamentali della magnetostatica, valide nel vuoto e nella
materia, sono la (9.27) e
rot H = J
(9.28)
a cui deve aggiungersi naturalmente la relazione strutturale che lega i tre vettori
B, H ed M. Vedremo tuttavia nel seguito che questa ultima relazione sarà
sostituita, per poter pervenire alla soluzione del problema della magnetostatica, da
una legge fenomenologica che, come nel caso dell'elettrostatica per E e D,
permette di associare direttamente il vettore B al vettore H.
Consideriamo ora due mezzi diversi separati da una superfìcie Σ ed un cilindro
elementare di superficie S intersecato da Z come mostrato in Fig. 9.5a).
Calcoliamo l'integrale di volume del vettore div B sul volume V racchiuso
50
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
a)
b)
FIG. 9.5
- a) e b) Calcolo delle condizioni al contorno di B ed H sulla superficie di separazione E.
dalla superficie S. Per la (9.27) ed il teorema della divergenza possiamo scrivere:
(9.29)
Facendo tendere a zero l'altezza del cilindro in modo da limitare il calcolo ai
soli contributi del flusso attraverso le due basi, sulle quali assumiamo il vettore B
uniforme, otteniamo:
B1n = B2n
(9.30)
dove Bln e B2n sono le componenti normali del vettore B alla superficie di
separazione in punti molto prossimi a Σ rispettivamente nel primo e nel secondo
mezzo. Dalla (9.30) risulta pertanto che attraverso la superficie di separazione tra
due mezzi differenti la componente normale alla superficie del vettore B è
continua.
Dato il circuito elementare C di Fig. 9.5b) calcoliamo il flusso del vettore rot
H attraverso la superficie S delimitata da C. Per la (9.28) abbiamo:
(9.31)
che mediante il teorema di Stokes applicato all'integrale a sinistra diviene:
(9.32)
9.7]
CAMPO MAGNETICO ESTERNO AD UN MATERIALE
51
Facendo tendere a zero l'altezza Δh di C e considerando H uniforme sui tratti
infinitesimi Al, la (9.32) fornisce immediatamente il risultato:
H1t,-H2t = Js
(9.33)
dove H1t e H2t rappresentano le componenti di H tangenti alla superficie I in
punti prossimi alla superficie stessa rispettivamente nel primo e nel secondo
mezzo, e Js indica una densità di corrente di conduzione superficiale, cioè una
corrente di conduzione per unità di lunghezza sulla superfìcie Z, diretta normalmente rispetto al piano in cui è contenuto il cammino C. Nel caso in cui la
corrente superficiale fosse nulla:
H1t = H2t
(9.34)
e quindi la componente tangenziale del vettore H risulta continua attraverso la
superficie di separazione dei due mezzi.
9.7 Campo magnetico esterno ad un materiale magnetizzato. Rappresentazione
mediante poli magnetici
Una spira percorsa da corrente avente momento magnetico m genera in un
punto a grande distanza rispetto alle sue dimensioni lineari un campo magnetico B
= - U0 grad ϕm con ϕm potenziale scalare magnetico dato da :
(9.35)
Dato un materiale magnetizzato caratterizzato da una magnetizzazione M
possiamo associare ad ogni suo volumetto dυ′ un momento magnetico dm = M
dυ′. Il potenziale scalare magnetico generato dal volumetto dυ′ di coordinata r′ in
un punto esterno distante r dall’origine delle coordinate è allora:
(
per cui il potenziale generato nel punto r da tutto il volume V del materiale risulta:
(9.36)
Poichè
e valendo inoltre la relazione:
div (ψ M) = ψ div M + M ⋅ grad ψ
(9.37)
52
MAGNETOSTATICA NEI MEZZI MATERIALI
ponendo ψ =
1
r − r'
[CAP. 9
, possiamo scrivere che :
(9.38)
Per la (9.38), la (9.36) diviene:
(9.39)
Applicando il teorema della divergenza al primo integrale a destra si ottiene :
(9.40)
Definiamo ora le due quantità scalari:
ρm(r') = - div' M(r')
detta densità volumetrica di polo magnetico, e
σm(r') = M(r')-n
(9.41)
(9.42)
detta densità superficiale di polo magnetico.
La ρm e la σm, consistenti in distribuzioni fittizie di cariche o poli magnetici
distribuiti sulla superficie e nei volumi dei materiali magnetizzati, si rivelano
quantità molto utili nella impostazione e risoluzione dei problemi di
magnetostatica che coinvolgono mezzi magnetizzati. Esse svolgono nell'ambito
del magnetismo lo stesso ruolo che le densità di cariche di polarizzazione σp e ρp
rivestono nella teoria dei dielettrici e permettono di affrontare i problemi di
magnetostatica utilizzando la stessa metodologia dell'elettrostatica.
Avevamo già mostrato nel paragrafo 8.5, parlando delle lamine, che una spira
percorsa da corrente, relativamente agli effetti magnetici, può essere considerata
simile a due distribuzioni superficiali di poli magnetici di modulo uguale ma di
segno opposto separate da un piccolo spessore δ: abbiamo ora dimostrato che il
campo magnetico generato da un corpo magnetizzato può essere descritto come
prodotto da una distribuzione superficiale e da una distribuzione volumetrica di
poli magnetici.
Se il materiale è uniformemente magnetizzato, cioè se div M = 0, la densità
volumetrica ρm è nulla, ed è presente solamente una densità σm su quelle superfici
per le quali esiste una componente normale di M non nulla. Queste sono le
superfici che in una comune calamita a forma di barretta o di ferro di cavallo
vengono comunemente indicate con il nome di poli: le distribuzioni superficiali di
cariche magnetiche positive individuano il cosiddetto polo nord, le distribuzioni
superficiali di cariche magnetiche negative il polo sud.
9.8]
CAMPO MAGNETICO INTERNO AD UN MATERIALE
53
L'intensità totale dei poli magnetici distribuiti nel volume e sulla superficie di
un mezzo magnetizzato è evidentemente nulla. Si ha infatti:
(9.43)
come è facile dimostrare applicando al primo integrale il teorema della
divergenza.
Il campo B generato da un materiale magnetizzato di volume V e superficie S è
pertanto dato da:
B(r) = -μ0 grad ϕm
(9.44)
con:
(9.45)
Risulta così evidente l'utilità della rappresentazione mediante poli magnetici,
che permette di utilizzare in problemi di magnetostatica il formalismo della
elettrostatica, data la maggiore semplicità connessa con il calcolo del gradiente di
un potenziale scalare rispetto al calcolo del rotore di un potenziale vettore
necessario nella rappresentazione mediante correnti di magnetizzazione.
Dalla (9.44) ricaviamo inoltre, trattandosi di un punto esterno al materiale,
dove vale la relazione B = μ0H, che
H = - grad ϕm
(9.46)
9.8 Campo magnetico interno ad un materiale magnetizzato
Per quanto riguarda la descrizione del campo magnetico macroscopico
all'interno della materia valgono naturalmente, da un punto di vista generale, le
considerazioni fatte nella trattazione del campo elettrostatico nei dielettrici.
L'induzione magnetica che in tal modo si definisce coincide con il valor medio
del campo che si dedurrebbe considerando la deviazione prodotta dalla forza di
Lorentz q (u × B) sul cammino di una particella di carica q che attraversa ad alta
velocità il materiale magnetizzato.
Prima tuttavia di procedere alla determinazione di B all'interno di un mezzo
magnetizzato, visto che per semplicità di calcolo abbiamo deciso di far ricorso
alla trattazione della magnetizzazione mediante poli magnetici, vogliamo ancora
una volta sottolineare come tale rappresentazione non sia che un utile artificio, e
che questo, in quanto tale, va applicato con molta cautela. A titolo di esempio
ricordiamo che le linee di forza B sono linee chiuse o che si estendono all'infinito
mentre la presenza di poli o cariche magnetiche comporta l'esistenza di linee di
forza che iniziano e terminano in punti ben determinati. Per completare pertanto
l'analogia con la trattazione del campo elettrostatico nella materia
54
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
utilizzeremo il vettore ausiliario H per il quale è possibile mostrare che nel materiale magnetizzato i poli magnetici rappresentano le sorgenti del campo. Se infatti
calcoliamo la divergenza della (9.24) otteniamo:
essendo div B = 0 e - div M = ρm, si ha :
div H=ρm
(9.47)
relazione del tutto analoga a quella valida per il campo induzione elettrostatica D.
Allo scopo di determinare il valore del campo magnetico nella materia, in maniera
simile a quanto fatto per il campo elettrostatico, consideriamo una sottile cavità
cilindrica scavata in un materiale magnetizzato, omogeneo lineare e isotropo, con
l'asse parallelo alla direzione del vettore magnetizzazione M, come illustrato in
Fig. 9.6. L'interno della cavità è una regione vuota nella quale in linea di principio
è sempre possibile realizzare una esperienza per ricavare l'intensità del campo
magnetico, misurando per esempio la coppia che agisce su una spira elementare
percorsa da corrente o su un aghetto magnetico oppure la forza di Lorentz che
agisce su una carica in moto.
FIG. 9.6
- Cavità cilindrica all'interno di un materiale magnetizzato.
In punti prossimi alla superfìcie laterale della cavità cilindrica e situati da parti
opposte rispetto a questa, per le componenti tangenziali di H vale la relazione
(9.34). Poiché inoltre si è scelto l'asse della cavità parallelo ad M, il vettore H nel
materiale risulta tangente alla superfìcie laterale del cilindro e si ha perciò che:
Hm=Hc
(9.47 bis)
dove con Hm ed Hc indichiamo il vettore intensità magnetica nel materiale e nella
cavità.
L'intensità magnetica Hc nella cavità può essere calcolata mediante la (9.46)
prendendo per il potenziale ϕm l'espressione (9.45). Bisogna tuttavia tener presente
che gli integrali che compaiono nella (9.45) sono estesi al volume totale V del
materiale e alla sua superfìcie S esterna, mentre per il calcolo di
9.8]
CAMPO MAGNETICO INTERNO AD UN MATERIALE
55
Hc nella cavità bisognerebbe tener conto del fatto che il materiale magnetizzato
contenuto all'interno di S0 è stato rimosso e che sulle basi della cavità cilindrica
appaiono delle densità superficiali di cariche magnetiche ± σm che non erano
considerate nell'integrale superficiale della (9.45). D'altra parte, se supponiamo che
la cavità cilindrica sia molto sottile, con un volume che al limite tende a zero,
possiamo assumere che il vettore Hc nella cavità sia dato da:
Hc=- grad ϕm
(9.48)
con ϕm esattamente uguale a quello dell'espressione (9.45) e cioè in altre parole con
gli integrali estesi al volume e alla superficie del materiale magnetizzato.
Possiamo così affermare che il vettore intensità magnetica H in un punto interno
al materiale è deducibile dalla stessa espressione valida per il calcolo di H in un
punto esterno.
Per la relazione (9.24) abbiamo poi che nel materiale deve essere:
(9.49)
che combinata con la (9.47 bis) fornisce:
(9.50)
Da questa ultima espressione deduciamo che nel materiale il vettore induzione
magnetica vale:
B = μ0 (Hc + M)
(9.51)
che per la (9.48) diviene:
B = - μ0 grad ϕm +ϕ0 M
(9.52)
con:
(9.53)
dove, come detto, gli integrali vanno estesi al volume V e alla superficie S del
materiale magnetizzato.
L'espressione (9.52) fornisce pertanto il valore di B generato da un materiale
magnetizzato in ogni punto dello spazio, interno o esterno. Ovviamente all'esterno
del materiale l'ultimo termine a destra è nullo essendo nel vuoto nullo il vettore M.
Nel caso in cui, oltre al materiale magnetizzato, si prendano in considerazione
come sorgenti del campo anche le densità di correnti di conduzione J,
56
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
l'induzione magnetica B, tenendo conto della (8.55), è data da:
(9.54)
che rappresenta pertanto l'espressione più generale per il vettore B.
9.9
La suscettività e la permeabilità magnetica
L'equazione (9.54) ci permette di risalire al valore di B in ogni punto dello
spazio una volta noti, oltre le correnti che fluiscono nei conduttori, il potenziale
scalare ϕm e quindi le densità di polo magnetico σm e ρm. Dato che σm e ρm, per
quanto dimostrato precedentemente, sono funzioni di M, il problema del calcolo
di B è risolto, quando si è in presenza di materiali magnetizzati, se è nota la
magnetizzazione M. D'altra parte la intensità di magnetizzazione M dipende e
dalla natura del materiale e dal valore del campo magnetico totale applicato che a
sua volta comprende il contributo dovuto al materiale magnetizzato. Il problema
posto in questi termini è evidentemente senza soluzione in quanto non conoscendo
il campo magnetico totale non siamo in grado di determinare il valore della
magnetizzazione e viceversa.
Risulta perciò necessario introdurre nella nostra trattazione una relazione
sperimentale che leghi il vettore B al vettore H o, in modo equivalente, una
relazione tra il vettore M ed uno dei due vettori del campo magnetico.
Misure sperimentali atte a determinare il comportamento magnetico dei mezzi
materiali mostrano che questi possono essere divisi in due categorie. Una
comprendente i materiali cosiddetti diamagnetici e paramagnetici che presentano
una debole magnetizzazione ed un comportamento lineare per cui B, H ed M
risultano fra loro proporzionali, ed una comprendente i cosiddetti materiali
ferromagnetici che presentano una forte magnetizzazione ed un comportamento
decisamente non lineare. Questa ultima categoria sarà trattata a parte nel prossimo
paragrafo.
Normalmente per i materiali lineari si introduce la legge sperimentale:
M=χm H
(9.55)
dove χm è una quantità adimensionale che prende il nome di suscettività
magnetica. La (9.55) vale per tutti i materiali lineari isotropi mentre nel caso di
materiali lineari anisotropi essa viene sostituita da una relazione tensoriale in cui
la suscettività è rappresentata da una matrice a tre righe e tre colonne.
Riprendendo allora la relazione:
B = μ0 (H + M)
(9.56)
e sostituendo in essa l'espressione di M data dalla (9.55) otteniamo:
B = μ0(l + χm) H.
(9.57)
9.9 ]
LA SUSCETTIVITÀ E LA PERMEABILITÀ MAGNETICA
57
Ponendo poi:
μ = μ0 (l + χm) = μ0μr
(9.58)
μr = (l + χm) = μ /μ0
(9.59)
B = μ H.
(9.60)
con
la (9.57) si può scrivere:
La quantità μ prende il nome di permeabilità magnetica assoluta mentre la
quantità adimensionale μr viene chiamata permeabilità magnetica relativa.
Entrambe sono caratteristiche di un determinato materiale. La relazione (9.60)
vale per i materiali lineari isotropi omogenei; per i materiali disomogenei μ è uno
scalare funzione del punto, mentre per i materiali anisotropi μ diviene un tensore
del secondo ordine. In assenza di un mezzo materiale, cioè nel vuoto, la (9.60) si
riduce alla relazione da noi già introdotta:
B = μ0 H.
(9.61)
La suscettività magnetica χm è una quantità negativa per i materiali
diamagnetici e positiva per quelli paramagnetici; tuttavia per entrambi i tipi di
materiale
Tabella 9.1. Suscettività magnetica di alcuni materiali diamagnetici e paramagnetici alla
temperatura di 0 °C ed alla pressione di 1 atmosfera.
Idrogeno
Argon
Acqua
Rame
Quarzo
Diamante
Argento
Mercurio
Oro
Bismuto
Ossigeno
Magnesio
Alluminio
Tungsteno
Titanio
Platino
Palladio
-0,21 ⋅ 10-8
-0,95 ⋅ 10-8
-0.88 ⋅ 10-5
-0,94 ⋅ 10-5
-1.5 ⋅ 10-5
-2.2 ⋅ 10-5
-2,6 ⋅ 10-5
-3.2 ⋅ 10-5
-3,6 ⋅ 10-5
-1.7 ⋅ 10-4
17,9 ⋅ 10-7
1,2 ⋅ 10-5
2,3 ⋅ 10-5
6,8 ⋅ 10-5
7,0 ⋅ 10-5
2,9 ⋅ 10-4
8,2 ⋅ 10-4
58
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
il suo modulo è sempre molto minore dell'unità e pertanto la permeabilità
magnetica relativa μr è assai prossima all'unità. All'interno dei materiali
diamagnetici il campo magnetico risulta indebolito rispetto a quello che si
avrebbe nel vuoto, nella stessa regione occupata dal mezzo; all'interno dei
materiali paramagnetici al contrario il campo viene rafforzato; tuttavia, per il
piccolo valore di χm, gli effetti magnetici dovuti a questi due tipi di materiale
appaiono generalmente molto deboli.
9.10 Materiali ferromagnetici. Ciclo di isteresi
Le sostanze ferromagnetiche, a differenza di quanto avviene per quelle
diamagnetiche e paramagnetiche, sono sostanze a comportamento non lineare e
pertanto presentano una suscettività magnetica χm, e quindi una permeabilità
magnetica u, che dipende dalla intensità del campo magnetico applicato, cioè:
μ = μ. (H).
(9.62)
Bisogna inoltre aggiungere che sia χm sia μ. non sono funzioni ben definite di
H, perché per un dato valore di intensità di campo magnetico esse possono
assumere differenti valori a secondo di come quel particolare valore di H sia stato
raggiunto. Si suol dire così che suscettività e permeabilità magnetica dei mezzi
ferromagnetici dipendono dalla storia magnetica del materiale considerato.
Una ulteriore importante caratteristica dei materiali ferromagnetici è quella di
presentare una suscettività che può essere anche dell'ordine di 106, estremamente
grande se confrontata con i valori di χm delle sostanze diamagnetiche e
paramagnetiche ; sotto l'azione di un campo magnetico anche debole le sostanze
ferromagnetiche acquistano così una magnetizzazione molto intensa.
I materiali ferromagnetici sono sostanze solide cristalline (non esistono infatti
fluidi ferromagnetici) come per esempio il ferro, il nichel, il cobalto e le loro
relative leghe. Esistono tuttavia leghe del ferro, come alcuni tipi di acciaio
inossidabile, che non si comportano da ferromagnetici ma da paramagnetici.
FIG.
9.7 - Anello di materiale ferromagnetico con avvolgimento toroidale ed una bobina
per la misura della variazione di flusso magnetico.
9.10]
MATERIALI FERROMAGNETICI. CICLO DI ISTERESI
59
Per trattare i problemi di ferromagnetismo, vista l'impossibilità, per quanto
detto, di utilizzare una relazione tra B ed H come la (9.60), è necessario
determinare sperimentalmente l'andamento di B (o di M) in funzione di H. A
questo scopo consideriamo un anello di materiale ferromagnetico omogeneo e
isotropo, ed avvolgiamo intorno ad esso una bobina di filo conduttore con N1 spire
per unità di lunghezza, gli estremi della quale siano collegati ad un generatore di
forza elettromagnetica. Facendo passare una corrente I nella bobina, nell'anello si
produce un campo magnetico H che, se il raggio del toro r è molto più grande del
raggio a della sezione, può essere considerato uniforme. La (9.26) calcolata lungo
la circonferenza mediana del toro fornisce il valore dell'intensità magnetica,
H = Nl I. Il toro ferromagnetico si magnetizza uniformemente ma, poiché la sua
particolare geometria non permette la comparsa di distribuzioni di poli magnetici,
H non è modificato rispetto a quello che la bobina percorsa dalla stessa corrente
avrebbe prodotto se fosse stata avvolta nel vuoto.
All'interno del toro il vettore B è parallelo ad H, essendo il materiale isotropo,
e può essere determinato mediante una seconda piccola bobina avvolta sulla
prima. Se questa seconda bobina è composta di N2 spire di sezione S, il flusso di B
attraverso di essa è N2 BS.
Collegando la bobina ad un galvanometro balistico o ad un flussometro
calibrato è possibile, una volta noti N2 e S, risalire dalle variazioni di flusso alle
variazioni di B. Facendo allora circolare una corrente di intensità variabile I nel
primo avvolgimento, al toro ferromagnetico viene applicato un campo H di valore
noto, N1 I. Contemporaneamente si può, mediante il secondo avvolgimento,
misurare il valore del vettore B tramite le variazioni di flusso. Prima di iniziare
questo tipo di misura, per essere sicuri di avere a che fare con un materiale
inizialmente non magnetizzato, conviene far passare attraverso le spire del primo
avvolgimento una corrente alternata di cui si diminuisce lentamente la intensità
fino a zero. (1)
FIG. 9.8
- Ciclo di isteresi di un materiale ferromagnetico.
(1) Poiché come vedremo il comportamento ferromagnetico scompare al di sopra di una
temperatura, che è caratteristica di ogni sostanza, la smagnetizzazione di un materiale può
essere ottenuta mediante un opportuno riscaldamento.
60
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
Si faccia ora passare una corrente stazionaria nel primo avvolgimento in modo
tale che H, partendo da zero, arrivi ad un valore determinato H * ; se riportiamo in
un grafico i valori della induzione magnetica B vediamo che, all'aumentare di H,
essi si dispongono lungo la curva 1 di Fig. 9.8. Diminuendo poi H fino a
riportarlo a zero ed invertendo quindi il verso di percorrenza della corrente nella
bobina, in modo da rendere possibile valori negativi di H, fino ad - H*, troviamo
che B segue la curva 2. Riportando infine H dal valore -H* al valore H* notiamo
che B descrive la curva 3 chiudendo il cammino in maniera simmetrica. La curva
di Fig. 9.8 prende il nome di ciclo di isteresi del materiale. (1)
La forma del ciclo di isteresi dipende dal tipo di materiale e dal valore di H*;
in Fig. 9.9 sono riportati per un dato materiale alcuni cicli di isteresi per diversi
valori di H*. La curva tratteggiata che unisce le punte dei diversi cicli viene detta
curva di magnetizzazione. (2)
FIG. 9.9
- Cicli di isteresi per diversi valori di H* e curva di magnetizzazione (tratteggiata).
È interessante notare da questa curva, come la variazione di B, estremamente
rapida per bassi valori di H, divenga molto lenta per valori di H più grandi. In
effetti la magnetizzazione M del materiale al crescere di H aumenta fino a
raggiungere il valore massimo ammesso per il materiale in questione; tale valore
prende il nome di magnetizzazione di saturazione. Se allora indichiamo
(1) Il ciclo di isteresi ha un andamento simmetrico come quello di Fig. 9.8 solo se si è
avuto cura, prima di iniziare l'esperienza vera e propria, di far circolare nella prima bobina
la corrente variando l'intensità fino al valore massimo e invertendo il verso più volte in
modo che la magnetizzazione del materiale compia diversi cicli di isteresi. Generalmente
dopo qualche decina di inversioni il materiale si dispone in quello che viene detto stato
ciclico ed è in queste condizioni che è possibile ottenere una curva di isteresi simmetrica e
riproducibile.
(2) Nel caso in cui il ciclo di isteresi di Fig. 9.8 sia stato ricavato utilizzando un
materiale portato in stato ciclico, secondo il significato attribuito a questa espressione
nella nota precedente, la curva 1 del ciclo di isteresi si sovrappone alla curva di
magnetizzazione.
9.10]
MATERIALI FERROMAGNETICI. CICLO DI ISTERESI
61
con Hsat, il valore di H per cui la magnetizzazione si satura e ricordiamo la
relazione :
B = μ0(H + M)
(9.63)
vediamo che per H > Hsat l'incremento di B è dovuto solamente al termine μ0H.
Esaminiamo ora più particolareggiatamente il ciclo di isteresi di Fig. 9.8.
L'induzione B, al crescere di H tra zero ed H*, descrive inizialmente la curva
l la quale, se H * è sufficientemente elevato, può presentare l'andamento tipico
della condizione di saturazione della magnetizzazione. Al diminuire di H poi, B
decresce seguendo la curva 2 e per H = 0 assume un valore non nullo indicato in
figura con il punto r. Ciò è dovuto al fatto che, pur annullando il campo
magnetico imposto, non si annulla tuttavia la magnetizzazione del materiale.
Il materiale conserva cioè un ricordo del suo stato precedente e questo fa si che le
variazioni di B avvengano in ritardo rispetto a quelle di H ; la magnetizzazione
cioè si oppone al campo applicato e ne rallenta gli effetti. (1) Il valore di |B|
corrispondente ad H=0 prende il nome di induzione residua.
FIG. 9.10
- Permeabilità magnetica relativa del ferro in funzione di B.
Per annullare l'induzione magnetica è necessario applicare un campo esterno
inverso, indicato in figura con il punto c, il cui valore Hc è detto forza coercitiva.
Sostanze che presentano un Hc grande sono dette magneticamente dure mentre
sostanze con Hc piccolo sono dette magneticamente dolci. Per le sostanze
magnetiche dolci Hc è dell'ordine di qualche A/m mentre per le sostanze
magnetiche dure Hc può arrivare ad essere anche 105 - 106 A/m. Se si aumenta
ulteriormente H, sempre per valori negativi, anche l'induzione magnetica B
assume valori negativi fino a raggiungere nuovamente una condizione di
saturazione
(1) II termine isteresi deriva dal greco «υστερησις» che ha il significato di venire in
ritardo.
62
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
per la magnetizzazione che evidentemente ha ora direzione opposta alla
precedente. La parte del ciclo di isteresi per cui B è positivo ed H negativo è nota
come curva di demagnetizzazione ed ha notevole importanza nella trattazione dei
magneti permanenti.
Dalla curva di magnetizzazione di Fig. 9.9 è possibile ricavare il grafico della
permeabilità μr, del materiale (detta permeabilità ordinaria o normale) in
funzione o di B o di H. Come è mostrato in Fig. 9.10 si vede che la permeabilità
di un materiale ferromagnetico cresce all'aumentare del campo applicato,
raggiunge un valore massimo e poi decresce rapidamente non appena la
magnetizzazione comincia a raggiungere il suo valore di saturazione. Al crescere
indefinito del campo la permeabilità assoluta del mezzo tende a quella del vuoto
μ0
Il valore massimo della permeabilità relativa delle sostanze ferromagnetiche è
normalmente dell'ordine di 103 -104 ma in alcuni casi può arrivare ad essere
anche dell'ordine di 106.
9.11
Circuiti magnetici
Consideriamo un anello di sostanza ferromagnetica su una parte del quale sia
avvolta una bobina di N spire di filo conduttore percorso da una corrente
stazionaria I, come mostrato in Fig. 9.11.
FIG.
9.11 - Circuito magnetico chiuso formato da una bobina avvolta su un anello di
materiale ferromagnetico.
Dovendo essere div B = 0, le linee di forza del vettore B sono linee chiuse.
Faremo l'ipotesi che le linee di forza B siano tutte contenute all'interno dell'anello,
assumeremo cioè che non esistano linee di forza di B nella regione esterna al
materiale. Supporremo cioè che il flusso di B sia lo stesso per ogni sezione
dell'anello e che il flusso disperso in aria sia nullo. Questa è evidentemente una
approssimazione che è tuttavia in pratica tanto meglio verificata quanto più la
permeabilità magnetica del materiale è elevata rispetto a quello del mezzo
circostante. Sappiamo infatti che attraverso la superficie di separazione tra due
materiali con permeabilità magnetica relativa μr1 e μr2 in assenza di correnti di
conduzione
9.11 ]
CIRCUITI MAGNETICI
63
superficiali, vale per la componente tangente del vettore H la condizione:
H1t = H2t
e questa per la relazione esistente tra B ed H, cioè B = μ0μr H, può anche essere
scritta nella forma:
dalla quale deriva che:
Se il primo mezzo ha una permeabilità magnetica relativa molto maggiore di
quella del secondo (nel caso di un materiale ferromagnetico e dell'aria il rapporto
μr1 / μr2 può essere anche molto maggiore di 103) Blt è molto maggiore di B2t, e
quindi il numero di linee di forza di B nel primo mezzo è molto più grande che nel
secondo. Si vede cosi che le linee di forza di B tendono ad addensarse all'interno
del corpo con permeabilità magnetica più alta; esso sembra assorbire il flusso del
vettore B.
Applicando il teorema della circuitazione di Ampère alla circonferenza
mediana C dell'anello troviamo che:
(9.64)
In ogni punto del percorso C, H e B sono paralleli tra loro e tangenti a C ed
inoltre possiamo scrivere, assumendo B sufficientemente uniforme su ogni
sezione del toro, che H = Φ/Sμ dove Φ = BS è il flusso dell'induzione magnetica.
La (9.64) diviene cosi:
(9.65)
dove Φ è stato portato fuori dal segno di integrale poiché, avendo assunto il flusso
disperso nullo, è costante lungo tutto l'anello. Se definiamo come forza magnetica
motrice la quantità:
f.m.m. = N1
(9.66)
e riluttanza la quantità:
(9.67)
64
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
la (9.65) si può scrivere nella forma:
f.m.m. =
Φ
(9.68)
espressione che risulta simile alla equazione valida per un circuito percorso da
corrente continua : = RI.
Questa analogia che è alla base del concetto di circuito magnetico non è altro
che una schematizzazione per descrivere lo stato magnetico del materiale.
Tuttavia, fintanto che rimane valida l'ipotesi di flusso disperso nullo, possiamo
immaginare che il flusso di B all'interno del circuito magnetico sia l'analogo della
corrente / in un circuito elettrico (che rimane sempre la stessa per ogni sezione del
filo). L'avvolgimento di N spire della bobina, responsabile della generazione del
flusso magnetico nel circuito magnetico, è paragonabile alla batteria che produce
la corrente in un circuito elettrico; la forza magnetomotrice è così il
corrispondente della forza elettromotrice e la riluttanza, che dipende dalle
caratteristiche geometriche del circuito e dalla permeabilità magnetica del
materiale secondo la (9.67), è l'analogo della resistenza.
Consideriamo ora l'elettrocalamita di Fig. 9.12 formata da una bobina di N
spire percorsa da corrente I avvolta su un anello di materiale ferromagnetico
interrotto da un sottile strato di aria, detto traferro. In questo problema bisogna
tener conto che le linee di forza di B nel traferro, dove la permeabilità magnetica
è debole e circa uguale a quella del vuoto μ0, tendono ad allontanarsi una dall'altra
allargandosi nella regione vicina.
FIG.
9.12 - Circuito magnetico in serie formato da una bobina avvolta su un anello di
materiale ferromagnetico con un traferro in aria.
Tuttavia, se lo spessore del traferro è molto sottile, è sempre possibile in prima
approssimazione trascurare il flusso di B disperso nella regione esterna al traferro
e supporre che Φ rimanga costante lungo tutto il circuito magnetico composto
questa volta da due parti: uno di materiale ferromagnetico ed uno
9.11 ]
CIRCUITI MAGNETICI
65
di aria. Applicando allora la (9.65) al circuito di Fig. 9.12 e ricavando Φ
otteniamo:
(9.69)
dove lm e la indicano rispettivamente il tratto del cammino C nel materiale e nel
traferro entrambi di sezione S. Dalla (9.69) risulta che la riluttanza totale del
circuito magnetico di Fig. 9.12, è:
(9.70)
e quindi che:
(9.71)
Generalizzando questo risultato possiamo scrivere che la riluttanza di un
circuito magnetico composto da più parti in serie, ognuna omogenea e con
sezione costante, è data da:
(9.72)
Nel caso di un circuito magnetico come quello di Fig. 9.13 è facile rendersi
conto che:
(9.73)
dove Φ è il flusso totale di B, indotto dalla bobina percorsa dalla corrente I; Φ1,
Φ2, 1 , e 2 sono rispettivamente i flussi e le riluttanze nel primo e nel secondo
ramo del circuito magnetico.
FIG. 9.13
- Circuito magnetico in parallelo.
66
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
Dall'espressione (9.73) si ricava che per la riluttanza totale di un circuito magnetico composto da più parti in parallelo vale la relazione:
(9.74)
Poiché la riluttanza è inversamente proporzionale alla permeabilità μ. del
materiale, è evidente che un materiale ad alto μ. rappresenta un percorso di bassa
riluttanza per il flusso magnetico. Pertanto tra due percorsi paralleli di un circuito
magnetico, uno a bassa riluttanza ed uno ad alta riluttanza, la frazione maggiore
del flusso magnetico passa attraverso il percorso a riluttanza minore (1).
Ritornando alla formula (9.69) notiamo che per la determinazione di B si pone
il problema di quale valore scegliere per la permeabilità magnetica del materiale
dato che questa dipende da B. È possibile operare per approssimazioni successive
nella seguente maniera: si trascura inizialmente nella (9.69) il termine lm/μS, che
risulta generalmente molto minore del termine la/μ0S, e si ottiene B = μ0 NI/la ; il
valore della permeabilità μ. del materiale si ricava riportando il valore di B
ottenuto sulla corrispondente curva di magnetizzazione; a questo punto si calcola
la riluttanza totale del circuito e tramite la (9.69) il flusso Φ; da questo valore di
Φ si risale al nuovo valore di B nel materiale e si ridetermina la permeabilità
magnetica μ. Ripetendo questo procedimento più volte è possibile ottenere il
valore di B nel traferro con l'approssimazione desiderata.
9.12 Magneti permanenti
E detto magnete permanente un materiale il quale, in assenza di campo
magnetico esterno eccitatore, presenta una magnetizzazione M che entro certi
limiti non dipende da fattori fisici, come per esempio la temperatura e la
pressione, e resta invariata anche in presenza di un campo magnetico. Esistono
magneti permanenti naturali come la magnetite (Fe3O4) e magneti permanenti
artificiali prodotti sottoponendo sostanze ferromagnetiche, generalmente acciai di
differenti composizioni, all'azione di un campo magnetico. I materiali più
utilizzati per la produzione di magneti permanenti artificiali sono i cosiddetti
Alnico, leghe speciali di alluminio, nichel, cobalto e ferro. Tra questi l'Alnico V,
composto dal 14 % di Ni, dal 8 % di Al, dal 24 % di Co, dal 3 % di Cu e per il
rimanente da Fe, presenta una forza coercitiva di 5 ⋅ 104 A/m ed una induzione
residua di circa 1,3 weber/m2. Il materiale viene preparato mediante
raffreddamento da 1250 °C a 600 °C alla velocità di 1-5 °C/s in presenza di un
campo magnetico di 24 ⋅ 104 A/m.
(') Lo schermaggio magnetico di strumenti molto delicati si ottiene circondando gli
strumenti con del materiale ad alta permeabilità magnetica. Lo schermo rappresenta per il
flusso di B un cammino con bassa riluttanza e pertanto le linee di forza di B si addensano
all'interno dello schermo diminuendo nella regione in esso contenuta.
9.12]
MAGNETI PERMANENTI
67
I magneti permanenti, in varie forme, trovano largo uso nella produzione di
campi magnetici a scopi industriali. Ci limiteremo a prendere in esame un
magnete permanente dalla configurazione classica, mostrata in Fig. 9.14, per il
quale illustreremo in particolare il metodo per calcolare il valore dell'induzione
magnetica nel traferro in funzione delle dimensioni geometriche e del tipo di
materiale utilizzato. Supponiamo innanzitutto che le linee di forza di B siano tutto
contenute nel magnete e che attraversino tutte la zona del traferro, che
immaginiamo di sezione S uguale a quella del materiale magnetizzato.
FIG. 9.14
- Magnete permanente con traferro in aria.
Le linee di forza di B hanno quindi una forma perfettamente circolare, e, per
quanto esposto nel paragrafo precedente, il flusso disperso di B è nullo e quindi il
prodotto BS risulta costante lungo tutto il toro per ogni sezione del materiale e del
traferro.
In assenza di densità corrente di conduzione J, come si ha nel caso in considerazione, le leggi fondamentali della magnetostatica si scrivono:
div B = 0
rot H = 0.
(9.75)
La prima di queste espressioni permette di affermare, secondo quanto già
detto, che la componente normale di B attraverso la superficie di separazione tra il
materiale magnetizzato ed il traferro è continua e poiché il vettore B in questo
caso è perpendicolare alla superficie di separazione troviamo che:
Ba = Bm
(9.76)
dove con gli indici a ed m indichiamo rispettivamente l'aria ed il materiale
magnetizzato permanentemente. Assumendo come valore della permeabilità
68
MAGNETOSTATICA NEI MEZZI MATERIALI
[CAP. 9
magnetica dell'aria quello del vuoto, abbiamo inoltre che nel traferro deve essere :
Ba = μ0 Ha.
(9.77)
Calcolando il flusso di rotH attraverso la circonferenza mediana C del toro, e
applicando il teorema di Stokes, per la (9.75) otteniamo che:
(9.78)
dove la ed lm rappresentano la lunghezza dei tratti del cammino C nel traferro e nel
materiale. Dalla (9.78) si ricava così che:
(9.79)
che combinata con la (9.76) e (9.77) diviene:
(9.80)
espressione che lega il valore di H e B nel materiale con le dimensioni del magnete. Il segno meno che compare nella (9.80) è indice del fatto che all'interno del
magnete permanente la linea di forza di H hanno verso opposto a quelle di B e che
quindi il materiale è sottoposto ad un campo di demagnetizzazione. Le linee di
forza di B, secondo la regola generale, sono linee chiuse percorse sempre nello
stesso verso ; le linee di forza di H invertono invece il loro verso di percorrenza
nel passaggio attraverso la superficie di separazione tra il materiale e l'aria. Questa
discontinuità per H è giustificata dal fatto che sulle due facce del magnete (dette
anche poli) come sappiamo esistono dalle distribuzioni di densità di poli
magnetici ± σm che rappresentano le sorgenti del campo H. Pertanto B ed H
risultano paralleli nel traferro ed antiparalleli nel materiale.
FIG.
9.15 - Curva di demagnetizzazione di un materiale ferromagnetico. Hm e Bm sono i
valori dei campi nei punti interni al materiale della calamita della precedente figura.
9.12]
MAGNETI PERMANENTI
69
La relazione (9.80) tuttavia non è sufficiente a determinare i valori di B ed H
nel magnete, bisogna infatti conoscere il diagramma che fornisce il valore di B in
funzione di H per il materiale in questione. Questo diagramma, del tipo di quello
mostrato in Fig. 9.15, rappresenta la parte del ciclo di isteresi per la quale B è
positivo ed H negativo, e cioè il quadrante in cui è contenuta la curva di
demagnetizzazione. Tracciando su questo grafico la retta individuata dalla (9.80)
si risale ai valori di B ed H nel materiale, relativamente alle dimensioni
geometriche del magnete in studio. L'induzione magnetica nel traferro, essendo
Bm = Ba, risulta così determinata.
10
Origine atomica delle proprietà magnetiche
di un materiale
10.1
Introduzione
Nel precedente capitolo abbiamo descritto il comportamento magnetico della
materia mettendoci da un punto di vista macroscopico ; gli effetti magnetici della
materia sono stati descritti ricorrendo all'introduzione di una grandezza, il vettore
M, che, legata sperimentalmente all'intensità del campo magnetico eccitatore,
rappresentasse gli aspetti macroscopici della magnetizzazione. In questo capitolo,
pur limitando la trattazione ad alcuni aspetti estremamente elementari,
cercheremo di capire quale sia l'origine a livello microscopico della
magnetizzazione, esaminando in particolare la risposta dei singoli atomi o
molecole costituenti la materia ad un campo magnetico applicato.
Per quanto riguarda le proprietà magnetiche in assenza di campo magnetico
esterno, gli atomi e le molecole possono essere divisi in due categorie: quelli che
hanno un momento magnetico proprio e quelli che non lo hanno. Tale momento
magnetico, come abbiamo già avuto occasione di accennare, è dovuto sia al moto
orbitale degli elettroni intorno al nucleo sia al moto rotatorio, o di spin, degli
elettroni intorno al proprio asse. Gli atomi e le molecole per i quali la somma dei
momenti magnetici dovuti al moto orbitale e allo spin di tutti gli elettroni ad essi
appartenenti risulta uguale a zero sono quelli privi di momento magnetico
proprio. Questo si verifica in particolare per gli atomi che presentano gli strati
elettronici completi.
L'applicazione di un campo magnetico esterno fa sì che gli elettroni degli
atomi o delle molecole presentino, sovrapposto al moto primitivo, un altro
72
ORIGINE ATOMICA DELLE PROPRIETÀ MAGNETICHE
[CAP. 10
moto rotatorio, o più precisamente di precessione, intorno alla direzione del
campo. Tale moto è responsabile dell'insorgere di un momento magnetico indotto
orientato in senso opposto al campo che lo ha generato. Se inoltre gli atomi o le
molecole sottoposte al campo magnetico sono dotati di momento magnetico
proprio si manifesta anche un parziale orientamento, contrastato dall'agitazione
termica, dei momenti magnetici propri in direzione del campo.
La magnetizzazione delle sostanze costituite da atomi o molecole privi di
momento magnetico proprio è quindi dovuta esclusivamente al primo dei due
fenomeni sopra descritti, quello di precessione. L'effetto di una tale magnetizzazione, risultante dai momenti magnetici indotti orientati in senso antiparallelo al
campo magnetico applicato, è quello di indebolire quindi il campo stesso. Questi
materiali presentano pertanto una suscettività magnetica negativa e sono chiamati
diamagnetici.
Le sostanze costituite da atomi o molecole dotati di momenti magnetici propri
subiscono entrambi i fenomeni, cioè sia quello di precessione degli elettroni, sia
quello di orientamento dei momenti magnetici propri ; questo secondo contributo
risulta però preponderante e pertanto atomi e molecole presentano globalmente
una componente del momento magnetico parallela al campo esterno con un valore
dipendente dalla temperatura. Questi materiali sono distinti da una suscettività
magnetica positiva e sono detti materiali paramagnetici.
Resta infine da analizzare il comportamento dei materiali ferromagnetici.
Vedremo che esso è in parte riconducibile a quello dei materiali paramagnetici,
anche se presenta aspetti molto più complessi ai quali dedicheremo soltanto
alcuni brevi cenni.
10.2 Campo magnetico molecolare
Si definisce campo magnetico molecolare o locale Bm il campo che agisce nel
punto ove è situato un atomo (od una molecola) e che è responsabile della sua
magnetizzazione; esso è generato dalle correnti di conduzione e da tutti i dipoli
magnetici del materiale ad eccezione di quello relativo all'atomo o alla molecola
in esame. Da un punto di vista microscopico possiamo assumere un modello di
materiale magnetizzato costituito da un insieme di poli magnetici posti nel vuoto;
tra il vettore induzione Bm ed il vettore intensità magnetica Hm intercorre allora la
relazione:
Bm = μ0Hm.
(10.1)
Il campo magnetico molecolare può essere messo in relazione con il campo
magnetico macroscopico interno al materiale. Normalmente, anche se il vettore
responsabile della magnetizzazione è il vettore Bm, si preferisce trovare una
correlazione tra Hm ed H poiché questi vettori possono essere espressi in termini
di correnti e di densità di poli magnetici.
Per il calcolo del campo Hm si procede in modo simile a quanto fatto nel
capitolo 5 per la determinazione dell'espressione del campo elettrico molecolare
10.2]
CAMPO MAGNETICO MOLECOLARE
73
Em. Prendiamo un volume V di materiale, che per semplicità supporremo
uniformemente magnetizzato, e scaviamo nell'intorno del punto in cui vogliamo
conoscere il campo molecolare una cavità sferica. Il materiale esterno alla cavità
viene considerato, ai fini del calcolo di Hm, macroscopicamente, cioè come un
continuo rappresentabile pertanto mediante una opportuna distribuzione di poli
magnetici; il materiale che si trova nella cavità viene rimesso al suo posto e
considerato su scala microscopica, cioè come formato da un insieme di dipoli
magnetici, ognuno dei quali contribuisce al campo magnetico molecolare al
centro della sfera.
In un punto interno al materiale, tenendo conto di tutte le sorgenti, il campo
macroscopico H, come mostrato nel paragrafo 9.8, è uguale a:
(10.2)
Nel presente caso, avendo considerato una magnetizzazione uniforme,
l'integrale relativo alla densità di magnetizzazione ρm è nullo.
Per il calcolo del campo molecolare Hm oltre al campo macroscopico (10.2)
dobbiamo tener conto del campo HS generato dalla densità di poli magnetici
σm = M ⋅ n distribuita sulla superficie S della cavità sferica e del campo Hi,
generato al centro della sfera da tutti i dipoli magnetici in essa contenuti. Avremo
pertanto che:
Hm=H + HS + Hi.
(10.3)
Operando in maniera analoga a quanto fatto nel paragrafo 5.1 si può
dimostrare che:
(10.4)
Inoltre, ricordando la (5.8), si ha che:
(10.5)
dove la sommatoria è estesa a tutti i dipoli magnetici contenuti all'interno della
cavità, e rk rappresenta la distanza del k-esimo dipolo dal centro della cavità. Se ci
limitiamo a considerare i materiali, piuttosto numerosi, per i quali il campo Hi, è
nullo, il campo molecolare risulta dato da:
(10.6)
Indicando con m il momento magnetico totale acquisito per effetto della
magnetizzazione da una molecola in un campo magnetico, e a questo
proporzionale
74
ORIGINE ATOMICA DELLE PROPRIETÀ MAGNETICHE
[CAP. 10
possiamo scrivere che:
m = αmBm = αmμo Hm
(10.7)
dove αm prende il nome di polarizzabilità magnetica molecolare e rappresenta il
momento magnetico che un campo magnetico di intensità unitaria induce, sia per
effetto della precessione sia per effetto dell'orientamento, nella molecola. In un
mezzo con N molecole per unità di volume la magnetizzazione risulta M = Nm;
abbiamo quindi che:
M = Nαm μ0 Hm.
(10.8)
Utilizzando la relazione M = χmH e la (10.6), ricaviamo dalla (10.8) la
seguente relazione:
(10.9)
valida se il campo molecolare è quello dato dalla (10.6) e se tutte le molecole
sono adeguatamente descritte mediante il loro campo di dipolo ed hanno lo stesso
momento magnetico.
Per la maggior parte dei materiali diamagnetici e paramagnetici, a causa della
debole magnetizzazione, il termine
1
M, che compare nella (10.6), risulta
3
trascurabile e quindi il campo magnetico molecolare può essere approssimato con
il campo macroscopico. Assumiamo allora la relazione:
χm = N αm μ0.
(10.10)
10.3 Origine del diamagnetismo
Consideriamo l'elettrone di un atomo di idrogeno in moto rotatorio intorno al
nucleo su un'orbita circolare di raggio r, con velocità v0. Al moto rotatorio
dell'elettrone di carica - e possiamo immaginare associata una corrente
equivalente avente una intensità I=e/T, dove T, il periodo del moto di rotazione, è
uguale a 2πr/v0. Si ha così che:
I=
ev0
2πr
(10.11)
Inoltre, seguendo la convenzione sul verso della corrente, essa fluisce in verso
opposto al moto dell'elettrone. Il modulo del momento magnetico di questa spira
di corrente è dato dal prodotto della superficie della spira πr2 per la corrente I, e
risulta:
(10.12)
10.3]
ORIGINE DEL DIAMAGNETISMO
75
la direzione ed il verso sono quelli indicati in Fig. 10.1 e dipendono ovviamente
dal verso di rotazione dell'elettrone. L'elettrone, di massa me, per il suo moto
possiede inoltre un momento angolare:
L = mev0r
(10.13)
diretto perpendicolarmente al piano dell'orbita nel verso mostrato in Fig. 10.1.
FIG.
10.1 - Momento magnetico m0 e momento angolare L associati ad un elettrone in
moto su un'orbita circolare.
Come si vede in figura, i due vettori L ed m0 risultano antiparalleli ; invertendo il
verso di rotazione dell'elettrone risulta invertito sia il verso di L sia quello di m0.
Il rapporto tra i due vettori è indipendente dalla velocità dell'elettrone essendo
dato da:
(10.14)
Supponiamo ora che sull'atomo di idrogeno agisca un campo magnetico
molecolare Bm che per semplicità assumeremo diretto perpendicolarmente al
piano dell'orbita, come indicato in Fig. 10.2. Mediante l'elettrodinamica classica si
può dimostrare che il raggio dell'orbita rimane inalterato al variare della velocità
dell'elettrone. Tenendo conto di questo risultato, del quale però tralasciamo
FIG.
10.2 - L'applicazione di un campo magnetico modifica la velocità dell'elettrone
ruotante ma non il raggio dell'orbita.
76
ORIGINE ATOMICA DELLE PROPRIETÀ MAGNETICHE
[CAP. 10
lasciamo la dimostrazione, possiamo facilmente ricavare la nuova velocità
dell'elettrone. In assenza di campo magnetico, come riportato nel paragrafo 6.1, in
ogni punto dell'orbita la forza coulombiana esercitantesi tra il nucleo e l'elettrone
è in equilibrio con la forza centrifuga:
(10.15)
con ω0 = v0/r. La presenza del campo magnetico fa si che sull'elettrone agisca una
ulteriore forza, la forza di Lorentz FL = - e (v × Bm), che, in aggiunta a quella
coulombiana, deve eguagliare la forza centrifuga. Si ha così:
(10.16)
dove con v abbiamo indicato la velocità dell'elettrone in presenza di campo
magnetico. Ponendo allora ω = v/r e sostituendo la (10.15) nella (10.16)
troviamo:
(10.17)
da cui deriva:
(10.18)
Dato che (ω2 - ω 0 ) = (ω - ω0) (ω + ω0), supponendo che ω differisca poco da
2
ω0, è (ω2 - ω 0 ) ≅ 2ω (ω - ω0) e la (10.18) diviene:
2
(10.19)
dalla quale si ricava che la variazione della velocità angolare dell'elettrone dovuta
al campo magnetico è:
(10.20)
Nell'esempio di Fig. 10.2, per la particolare scelta del verso di rotazione
dell'elettrone e della direzione del campo magnetico, la velocità angolare dell'elettrone subisce un incremento positivo uguale a Δω. Se invertissimo il verso di
rotazione dell'elettrone, o in maniera del tutto equivalente prendessimo per il
campo magnetico la direzione opposta rispetto a quella di Fig. 10.2, la velocità
angolare dell'elettrone subirebbe una diminuzione uguale a Δω. La quantità ± Δω,
indicata sovente con il simbolo ωL, prende il nome di frequenza di Larmor. Dalla
(10.14) e (10.20) si ricava inoltre che:
(10.21)
10.3]
ORIGINE DEL DIAMAGNETISMO
77
Si può allora concludere che l'applicazione del campo magnetico all'atomo di
idrogeno fa sì che al moto primitivo di rotazione dell'elettrone intorno al nucleo si
sovrapponga un altro moto rotatorio con velocità angolare ωL in verso antiorario
intorno alla direzione del campo stesso.
Per ricavare la (10.20) è stata necessaria una approssimazione: abbiamo cioè
supposto che w differisse poco da ω0. Tale approssimazione rimane valida
fintantoché è possibile supporre che Δω / ω0 « 1 e quindi, per la (10.20), finché:
(10.22)
Poiché ω0 ha lo stesso ordine di grandezza della frequenza della luce visibile, e cioè
circa 10
+ 15
s-1, e 2me / e =
2 ⋅ 9 ⋅ 10−31
~ 10-11 troviamo che l'approssimazione
−19
1,6 ⋅ 10
vale se:
Bm « 104 weber/m2
(10.23)
valore di campo magnetico considerevolmente più grande di quelli normalmente
utilizzati.
FIG.
10.3 a) b) - Precessione del momento angolare intorno alla direzione del campo
magnetico applicato.
Abbiamo trattato, per ragioni di semplicità, il caso molto particolare dell'atomo
di idrogeno, prendendo inoltre il piano dell'orbita dell'elettrone perpendicolare al
campo magnetico esterno. In generale si ha invece a che fare con atomi forniti di
più elettroni, le orbite dei quali sono disposte su piani che formano angoli diversi
con la direzione del campo. È possibile tuttavia dimostrare che per un elettrone con
orbita posta su un piano inclinato rispetto a Bm la presenza del campo magnetico
induce un moto rotatorio in verso antiorario intorno alla direzione del campo stesso
con velocità angolare ωL (1). Consideriamo l'esempio riportato in Fig. 10.3 a) e b)
relativo all'istante in cui il momento
(l) Per una trattazione più rigorosa vedi Classical Mechanics di H. Goldstein pag. 176178.
78
ORIGINE ATOMICA DELLE PROPRIETÀ MAGNETICHE
[CAP. 10
mento angolare L di un elettrone avente un'orbita posta su un piano inclinato
rispetto al campo magnetico giace nel piano y = 0. Il modulo del momento
meccanico della coppia esercitata dal campo Bm sul momento magnetico m0 è :
(10.24)
mentre la direzione ed il verso sono quelli dell'asse y.
Nell'intervallo di tempo dt il momento angolare subisce, per effetto della coppia,
una rotazione e passa dalla posizione OA' alla posizione OB', compiendo un angolo
dα'; la lunghezza A'B' rappresenta così la variazione del momento angolare. Questa
variazione è inoltre uguale a:
Ldα' = L sen ϑ dα
(10.25)
dove dα è l'angolo di rotazione sul piano z = 0 compiuto dalla proiezione del
vettore L. Sappiamo inoltre che il momento meccanico
della coppia deve
essere uguale alla derivata rispetto al tempo del momento angolare che per quanto
detto risulta essere L sen ϑ dα/dt. Da tutto questo si deduce che :
(10.26)
e tenendo conto della (10.21) si trova infine che:
(10.27)
La quantità dα/dt può essere riguardata come la velocità di rotazione intorno
alla direzione del campo magnetico del vettore L ; tale vettore descrive nel tempo
la superficie laterale di un cono con il vertice in O e con un angolo di
semiapertura uguale a ϑ'. Il vettore L è d'altra parte in ogni istante perpendicolare
al piano contenente l'orbita dell'elettrone per cui si deduce che questo piano, per
effetto della presenza del campo magnetico, varia nel tempo conpiendo un moto
di precessione intorno al campo con velocita angolare ωL. In conclusione
possiamo
FIG. 10.4
- Momento magnetico generato dalla precessione di Larmor.
10.3]
ORIGINE DEL DIAMAGNETISMO
79
siamo dire che in presenza di un campo magnetico esterno gli elettroni acquistano
un moto di precessione intorno al campo con velocità angolare ωL. Il moto di
precessione si sovraimpone al moto primitivo degli elettroni e ne altera la
frequenza di rivoluzione su un piano perpendicolare al campo. Tutti gli elettroni
precedono nello stesso verso intorno al campo mentre la frequenza di precessione si
somma o si sottrae a quella di rivoluzione a seconda del verso con il quale
l'elettrone percorre l'orbita rispetto la direzione di Bm.
Prendiamo nuovamente in esame un atomo di idrogeno con l'orbita dell'elettrone
posta in un piano perpendicolare a Bm. Il moto rotatorio che l'elettrone compie
intorno al campo con velocità angolare ωL può essere interpretato come una
corrente IL che fluisce in una spira di raggio r come è mostrato in Fig. 10.4. Per le
convenzioni fatte la corrente, essendo prodotta dal moto di un elettrone, fluisce in
verso opposto al moto di questo e risulta uguale a:
(10.28)
A questa corrente è associato un momento magnetico di modulo m = IL S con
S = πr2 che per la (10.28) è:
(10.29)
dove il segno meno indica che il verso di m è opposto a quello di Bm.
Più in generale se l'orbita dell'elettrone è inclinata rispetto al campo magnetico
applicato essa, come abbiamo dimostrato, precede intorno a Bm ed il momento
magnetico indotto è in questo caso:
(10.30)
dove ρ è il raggio quadratico medio della proiezione dell'orbita su un piano
perpendicolare a Bm. Per un atomo contenente Z elettroni il momento magnetico
diviene:
2
(10.31)
Se gli elettroni sono distribuiti con simmetria sferica si ha in media nel tempo
2
2
2
2
che xi = yi = zi =1/3 ri , indicando con ri
2
la distanza quadratica media dell'i-
esimo elettrone dal nucleo. Da questo si deduce che
quindi la (10.31) può essere scritta nella forma:
ρi2 = xi2 + yi2 = 2/3 ri 2 e
(10.32)
80
ORIGINE ATOMICA DELLE PROPRIETÀ MAGNETICHE
[CAP. 10
La polarizzabilità magnetica dell'atomo indotta dalla precessione è così:
(10.33)
e per una sostanza che possiede N atomi per unità di volume, approssimando il
campo molecolare Hm con H e usando perciò la relazione (10.10) per cui χm =
Nαmμ0, si ha che:
(10.34)
Indicando con a2 la media dei quadrati delle distanze degli elettroni dal nucleo
abbiamo che:
(10.35)
e quindi che:
(10.36)
Se assumiamo a2 ~ 10-20 m, N ~ 5 ⋅ 1028 m-3 e Z ~ 10 si ottiene per la
suscettività χmd un ordine di grandezza di 10-5.
Per riassumere possiamo trarre le seguenti conclusioni:
1) - la suscettività indotta dalla precessione di Larmor è negativa ed è quindi la
causa del diamagnetismo ;
2) - il diamagnetismo è una proprietà comune a tutta la materia;
3) - la suscettività diamagnetica non dipende dalla temperatura.
Ricordiamo infine che la (10.36) vale solamente nel caso di atomi aventi
simmetria sferica e non per le molecole.
10.4 L'origine del paramagnetismo
Le sostanze diamagnetiche sono quelle per le quali gli atomi e le molecole
hanno un momento magnetico proprio nullo. Il paramagnetismo al contrario è un
fenomeno che interessa i materiali formati da atomi o molecole dotati di momento
magnetico proprio. In assenza di campo magnetico i dipoli atomici, per effetto
dell'agitazione termica, sono orientati a caso. Quando al materiale paramagnetico
viene applicato un campo magnetico ogni dipolo magnetico m0 acquista una
energia potenziale uguale a - m0 Bm cos ϑ dove ϑ è l'angolo compreso tra l'asse del
dipolo e il campo magnetico. L'energia
10.4]
L'ORIGINE DEL PARAMAGNETISMO
81
termica del sistema tende ad orientare in maniera del tutto casuale i dipoli
magnetici; tuttavia, poiché l'energia potenziale del sistema in presenza del campo
magnetico diminuisce se gli assi magnetici dei dipoli ruotano in maniera tale da
assumere orientamenti paralleli al campo magnetico, un parziale allineamento dei
dipoli alla direzione del campo è una configurazione favorita dal punto di vista
energetico. Dato tuttavia che la energia termica, eccetto per temperature molto
basse, è molto maggiore della energia potenziale, l'allineamento dei dipoli, che è
contrastato per effetto delle collisioni, è fortemente influenzato dall'agitazione
termica. Ad ogni modo l'orientamento, anche se parziale, dei momenti magnetici
propri degli atomi o molecole produce macroscopicamente una magnetizzazione
parallela al campo magnetico applicato.
Il problema di determinare la magnetizzazione risultante è un problema di
statistica, che può essere affrontato in maniera classica, ammettendo che tutte le
orientazioni del momento magnetico rispetto al campo siano possibili o in maniera
quantistica supponendo che solo alcune di queste siano permesse.
Discuteremo brevemente la trattazione classica, sviluppata da Langevin, che è
del tutto analoga a quella già descritta per la polarizzazione delle molecole polari
nel paragrafo 5.4.
Utilizzando punto per punto quanto detto in quella occasione possiamo scrivere
che la componente media del momento magnetico proprio in direzione di Bm è data
da:
(10.37)
Ponendo y =
m0 Bm
x = cosϑ la (10.37) diviene:
kT
(10.38)
dalla quale ricaviamo:
(10.39)
⎛
1⎞
La quantità L (y) = ⎜⎜ coth y − ⎟ è nota come funzione di Langevin ed ha
y⎠
⎝
l'andamento già mostrato in Fig. 5.4.
Nel caso di deboli campi magnetici, e cioè quando l'energia magnetica è
82
ORIGINE ATOMICA DELLE PROPRIETÀ MAGNETICHE
[CAP. 10
piccola rispetto all'energia termica, poiché y « 1, possiamo sviluppare la cotangente
iperbolica in serie:
(10.40)
Fermando lo sviluppo al secondo termine e sostituendo nella espressione della
funzione di Langevin, si ottiene L(y) = y/3 e di conseguenza la (10.39) si scrive:
(10.41)
La polarizzabilità magnetica dovuta all'effetto paramagnetico è quindi:
(10.42)
e, tenendo conto che anche per i materiali paramagnetici il campo molecolare
differisce di poco dal campo macroscopico, per la (10.10) si ha che la suscettività
paramagnetica è :
(10.43)
Quest'equazione, che prende il nome di legge di Curie mostra come la
suscettività dovuta al paramagnetismo sia positiva e inversamente proporzionale
alla temperatura.
Il momento magnetico proprio m0 è dell'ordine di qualche magnetone di Bohr,
dove un magnetone di Bohr è uguale a eh/4πme = 9,27⋅ 10-24 ampere⋅metro2. La
legge di Curie, che fornisce valori in buon accordo con i dati sperimentali per i gas
e per alcuni solidi, diviene inesatta per campi magnetici molto forti e per
temperature molto basse quando comincia a manifestarsi il fenomeno della
saturazione, cioè del quasi completo orientamento dei poli magnetici in direzione
del campo.
Evidentemente le sostanze paramagnetiche subiscono anche il fenomeno del
diamagnetismo ma quest'ultimo risulta completamente mascherato dall'effetto
paramagnetico, fortemente preponderante. Per una sostanza paramagnetica solida a
temperatura ambiente che obbedisce alla legge di Curie, prendendo m0= 10-23
ampere ⋅ m2 ed N ~ 5 ⋅ 10+28 m-3, si vede che χmp ~ 10-3.
10.5 Il ferromagnetismo e la legge di Curie-Weiss
Le sostanze ferromagnetiche, costituite da atomi o molecole dotati di momento
magnetico proprio, a differenza delle sostanze paramagnetiche, sono caratterizzate
dal fatto che già in presenza di campi magnetici relativamente
10.5]
IL FERROMAGNETISMO E LA LEGGE DI CURIE-WEISS
83
deboli mostrano una magnetizzazione molto elevata, quasi prossima al valore di
saturazione ; questa magnetizzazione in parte permane anche quando il campo
viene rimosso. Un tale comportamento sembra dimostrare che i dipoli magnetici
delle sostanze ferromagnetiche presentino una grande facilità ad allinearsi
parallelamente e a mantenere questo orientamento anche quando il campo
magnetico esterno è riportato a zero.
Per spiegare queste peculiari caratteristiche dei materiali ferromagnetici, Weiss
nel 1907 avanzò le seguenti due ipotesi:
1) ogni campione di materiale ferromagnetico è formato da un gran numero di
piccole regioni, dette domini, ognuna delle quali è spontaneamente magnetizzata
con una intensità di magnetizzazione all'incirca uguale a quella di saturazione ;
2) entro ogni dominio la magnetizzazione spontanea è sostenuta dalla esistenza di
un campo molecolare molto intenso responsabile dell'allineamento dei momenti
magnetici atomici.
L'evidenza sperimentale dell'esistenza dei domini magnetici è stata ottenuta
cospargendo con polveri molto sottili magnetizzabili o con soluzioni contenenti
particelle magnetizzabili la superficie di campioni di materiali ferromagnetici
opportunamente preparati e osservando al microscopio le figure formate dalle
polveri e i loro mutamenti al variare della magnetizzazione. Si è così trovato che i
domini di Weiss hanno dimensioni lineari molto piccole, comprese tra 10-2 e 10-6
cm, ma tali comunque da contenere un gran numero di atomi. In ogni dominio
l'intensità di magnetizzazione, che come abbiamo detto è quasi uguale al valore di
saturazione, è orientata preferenzialmente in direzioni correlate agli assi del
cristallo; queste direzioni vengono chiamate direzioni di facile magnetizzazione.
Poiché ogni dominio può presentare differenti direzioni di facile magnetizzazione
si ha che in un materiale nello stato smagnetizzato in ogni dominio il vettore
magnetizzazione ha un diverso orientamento ed è per questo motivo che
globalmente il materiale presenta una magnetizzazione risultante nulla (Fig. 10.5a).
L'applicazione di un debole campo magnetico produce l'espansione, a spese di
domini confinanti, di quei domini che hanno il momento magnetico con una
componente parallela al campo (Fig. 10.5b). Questo movimento dei confini
FIG.
10.5 - Magnetizzazione di un materiale ferromagnetico; a) materiale magnetizzato; b)
magnetizzazione per deformazione dei confini dei domini; c) magnetizzazione per rotazione
dei momenti magnetici dei domini
84
ORIGINE ATOMICA DELLE PROPRIETÀ MAGNETICHE
[CAP. 10
dei domini è reversibile ed è collegato al tratto lineare della curva 1 di Fig. 9.8 del
ciclo di isteresi del materiale.
Per campi magnetici più elevati le modificazioni dei confini dei domini
divengono irreversibili e per campi magnetici molto intensi si verifica infine una
parziale rotazione dei momenti magnetici dei domini (Fig. 10.5c) verso la direzione
del campo e la comparsa pertanto di una magnetizzazione di saturazione per tutto il
materiale. Ci proponiamo ora di determinare mediante un metodo grafico la
dipendenza della magnetizzazione M di un materiale ferromagnetico dal campo
magnetico applicato H. A questo scopo al fine di giustificare la magnetizzazione
spontanea dei domini assumiamo, seguendo quanto fu suggerito da Weiss, che il
campo molecolare in luogo della (10.6) sia invece dato dalla relazione:
Hm=H+γM
(10.44)
con H campo macroscopico e γ una costante detta costante di Weiss. Il termine γM
della (10.44) rappresenta l'effetto di interazione esistente tra i dipoli magnetici
atomici di un singolo dominio, responsabile della tendenza all'allineamento quasi
totale. La costante γ, che per le sostanze paramagnetiche come abbiamo visto ha un
valore uguale a 1/3, per i materiali ferromagnetici presenta un valore assai elevato
compreso tra 103 e 104. Non è possibile tuttavia giustificare un valore così elevato
del campo interno γM sulle basi della fisica classica ed infatti esso fu spiegato da
Heisenberg nel 1928 applicando la meccanica quantistica.
Noi ci limiteremo ad accettare la validità della (10.44) senza cercare di determinarne l'origine.
Considerando ora un campione di materiale costituito da N molecole per unità di
volume, tutte dello stesso tipo e dotate di momento magnetico proprio m0, avremo,
sulla base di quanto dimostrato nel paragrafo precedente, che la magnetizzazione M
del materiale, tenendo conto della (10.39), è data da:
(10.45)
Dalla (10.44) si ha inoltre che:
(10.46)
Ricordando che y =
m0 μ0
H m , questa espressione si può scrivere nella forma:
KT
(10.47)
Se tracciamo in un unico grafico, come mostrato in Fig. 10.6, la (10.45) e la
(10.47) in funzione della variabile y possiamo determinare dall'intersezione
10.5]
IL FERROMAGNETISMO E LA LEGGE DI CURIE-WEISS
85
FIG. 10.6 - Soluzione grafica delle equazioni (10.45) e (10.47):
(a) è la funzione Nm0 L(y) ;
(b) nel caso T<0, H ≠ 0;
(c) nel caso T<0, H = 0;
la temperatura nei casi (a) e (b) è la stessa;
(d) nel caso T=0, H = 0.
delle due curve il valore della magnetizzazione M del materiale relativo al campo
magnetico applicato. La (10.47) in particolare è rappresentata nel grafico da una retta
di coefficiente angolare:
(10.48)
che incontra l'asse delle ordinate nel punto - H/γ.
Come risulta dalla (10.48) il coefficiente angolare della retta (10.47) è
direttamente proporzionale alla temperatura del materiale.
Se aumentiamo o diminuiamo il campo magnetico H mantenendo costante la
temperatura, la retta (10.47) si sposta nel grafico rispettivamente verso destra o verso
sinistra rimanendo tuttavia sempre parallela a se stessa. Per H uguale a zero la retta
passa per l'origine delle coordinate (linea c di Fig. 10.6) ed il punto di intersezione tra
le due curve in questo caso fornisce il valore della magnetizzazione residua del
materiale per quella data temperatura. Consideriamo ora la retta passante per
l'origine, limitiamoci cioè al caso in cui H = 0, ed aumentiamo la temperatura del
campione. Il coefficiente angolare della retta all'aumentare della temperatura
aumenta fino a che per un dato valore di T la retta risulta tangente nell'origine alla
curva Nm0L(y). In questa situazione (linea d di Fig. 10.6) non esiste un punto di
intersezione tra le due curve e pertanto il campione considerato non presenta più una
magnetizzazione residua. Il coefficiente angolare relativo al valore della temperatura,
indicata con 0, per la quale si verifica quanto detto, vale:
(10.49)
86
ORIGINE ATOMICA DELLE PROPRIETÀ MAGNETICHE
[CAP. 10
ossia per la (10.48) e le (10.39) e (10.40):
(10.50)
e quindi:
(10.51)
La temperatura 0 prende il nome di temperatura di Curie ed è caratteristica del
materiale in esame.
Al di sopra della temperatura di Curie, come detto, il materiale non presenta più
magnetizzazione residua e perde quindi le sue caratteristiche ferromagnetiche per
comportarsi come un materiale paramagnetico.
Per il tratto lineare nella (10.45) abbiamo visto che si può scrivere:
(10.52)
Sostituendo ad Hm la (10.44) si ha che:
(10.53)
da cui si ricava:
(10.54)
e per la (10.51):
(10.55)
Da questa espressione si deduce che la suscettività magnetica del materiale è :
(10.56)
Arriviamo così a concludere che i materiali ferromagnetici al di sopra della
temperatura di Curie si comportano come sostanze paramagnetiche con la sola
10.5]
IL FERROMAGNETISMO E LA LEGGE DI CURIE-WEISS
87
differenza che al posto della temperatura T bisogna considerare la temperatura (T - 0).
La temperatura di Curie per il ferro e le sue leghe è compresa tra 700 e 1300 °K.
Ponendo nella (10.51) m0 uguale ad un magnetone di Bohr e cioè 9,27⋅ 10-24
ampere⋅m2, il numero N di atomi di ferro per metro cubo uguale a 8⋅5⋅10+28 m-3, e K=
1,38⋅10-23 joule/grado, si ottiene che γ ~ 4θ. Per cui prendendo θ= 800 °K abbiamo
che γ = 3200, confermando così l'elevato valore che per essa avevamo già
preannunciato.
11
L'induzione elettromagnetica
11.1
Introduzione
Gli esperimenti condotti da Oersted, Ampère ed altri avevano mostrato come
fosse possibile produrre effetti magnetici mediante fenomeni elettrici. Non si aveva
invece alcuna prova che valesse anche l'opposto e cioè che fenomeni magnetici
potessero generare effetti elettrici. Fu Faraday che nel 1831 compì l'importante
scoperta che doveva completare la connessione tra elettricità e magnetismo
osservando come una variazione di flusso di campo magnetico fosse in grado di
indurre una corrente in un circuito conduttore. Questa scoperta non solo fu fonte di
notevoli applicazioni pratiche quali ad esempio quelle dei generatori e dei
trasformatori ma, introducendo il principio che ad ogni campo magnetico variabile è
associato un campo elettrico, risultò fondamentale per la formulazione della teoria
del campo elettromagnetico di cui ci occuperemo in dettaglio nel capitolo 13.
In questo capitolo illustreremo la formulazione della legge di Faraday
sull'induzione elettromagnetica e le sue principali conseguenze.
11.2 La legge dell'induzione elettromagnetica
Se, ripetendo uno dei primi esperimenti di Faraday, avviciniamo un magnete ad
un circuito, in cui sia inserito uno strumento per misurare deboli intensità di corrente,
quale un galvanometro, notiamo che questo rivela un passaggio di corrente che
permane fintantoché il magnete è in movimento rispetto al circuito. La corrente che
fluisce nel circuito prende il nome di corrente indotta ed il fenomeno viene chiamato
induzione elettromagnetica.
90
L'INDUZIONE ELETTROMAGNETICA
[CAP. 11
Il medesimo effetto può essere prodotto muovendo il circuito rispetto al magnete
tenuto fermo, oppure avvicinando al circuito invece di un magnete una bobina
percorsa da corrente o tenendo fissi il magnete o la bobina e deformando il circuito.
È possibile infine ottenere una corrente indotta nel circuito ponendo accanto a questo
una bobina percorsa da corrente e facendone variare l'intensità.
L'insieme di tutte queste osservazioni si trova raccolto in due leggi ; la prima,
formulata nel 1845 da Neumann, e nota come legge di Faraday-Neumann, afferma
che:
quando il flusso del vettore induzione magnetica B concatenato con un circuito
varia nel tempo, nel circuito si induce una forza elettromotrice proporzionale alla
variazione del flusso.
La seconda, dovuta a Lenz, si enuncia invece nel modo seguente:
ogni variazione in un sistema magnetico produce un'azione che tende ad opporsi
alla variazione stessa.
Se consideriamo allora un circuito indeformabile e indichiamo con Φ (B) il valore
istantaneo del flusso ad esso concatenato del vettore induzione magnetica troviamo
che le due leggi sono espresse dall'equazione:
(11.1)
La quantità
è chiamata forza elettromotrice indotta e come può facilmente
dimostrarsi ha le dimensioni di un potenziale elettrico. La sua unità di misura nel
sistema M.K.S. è pertanto il volt che, come del resto già sappiamo, risulta eguale a
un weber/secondo. Disponendo di uno strumento per la misura di differenze di
potenziale come l'elettrometro, aprendo il circuito e collegando gli estremi ai
morsetti dello strumento, potremmo effettivamente misurare il valore della forza
elettromotrice
indotta dalla variazione del flusso magnetico.
Assunto inoltre che la resistenza del circuito sia R, applicando la legge di Ohm, si
ha che l'intensità della corrente indotta è data da:
(11.2)
Il segno meno che compare nella (11.1) è conseguenza della legge di Lenz. Si può
provare infatti che la corrente indotta dalla forza elettromotrice (11.1) fluisce nel
circuito in un verso tale da opporsi alla variazione del flusso del vettore B che la
produce. Prendiamo per esempio in considerazione il circuito C di Fig. 11.1. Se il
flusso del vettore B, prodotto ad esempio da un vicino magnete e concatenato con il
circuito, ha la direzione indicata nella figura e noi operiamo in modo da ottenere un
suo aumento, avvicinando il magnete,
11.2]
LA LEGGE DELL'INDUZIONE ELETTROMAGNETICA
91
FIG. 11.1
- Applicazione della legge di Lenz. La curva tratteggiata rappresenta una linea di
forza del campo magnetico generato dalla corrente indotta in C da un aumento del flusso
di B.
allora nel circuito, per la legge 11.1, si genera una forza elettromotrice la quale
induce in C una corrente che per la legge di Lenz deve avere il verso indicato in
figura. La corrente indotta a sua volta, per la prima formula di Laplace, è sorgente
di un campo B diretto in verso opposto a quello iniziale e che, sottraendosi a
questo, tende ad annullare l'incremento del flusso e quindi ad opporsi alla
variazione che lo ha prodotto.
Un ragionamento analogo vale nel caso in cui nel circuito C si produca una
diminuzione dal flusso di B prendendo naturalmente per la corrente indotta il
verso opposto e facendo attenzione che ora il campo da questa generato si somma
con il campo iniziale.
Ricordando le definizioni:
(11.3)
e
(11.4)
e sostituendo nella legge (11.1) si trova:
(11.5)
Per un circuito indeformabile e stazionario possiamo portare la derivata
rispetto al tempo sotto il segno di integrale dove diviene una derivata parziale.
Applicando inoltre all'integrale di sinistra della (11.5) il teorema di Stokes si ha:
(11.6)
92
L'INDUZIONE ELETTROMAGNETICA
[CAP. 11
Poiché S è una superficie arbitraria che ha per contorno la linea C del
circuito, dalla (11.6), che deve valere per qualunque superficie appoggiata su C,
si ottiene:
(11.7)
Questa espressione rappresenta la forma differenziale della legge di Faraday-Neumann sull'induzione elettromagnetica ed ha una validità molto più generale
della (11.1). Infatti per essa possiamo affermare che in ogni regione dello
spazio, sia essa vuota o contenga materiali dielettrici o conduttori, ove si abbia
un campo magnetico variabile nel tempo si ha anche un campo elettrico non
conservativo.
11.3 Flusso tagliato e flusso concatenato
È importante notare come la equazione (11.1) rappresenti una legge sperimentale indipendente non deducibile da altre leggi.
Tuttavia esiste un caso speciale, quello del flusso tagliato di B, in cui la forza
elettromotrice indotta può essere dedotta mediante la forza di Lorentz e la
conservazione dell'energia. Diciamo di essere in presenza di flusso tagliato ogni
qualvolta un circuito si muove in una regione ove esiste un campo magnetico o
quando una sorgente di campo magnetico è messa in moto rispetto al circuito.
Consideriamo come esempio un circuito chiuso formato da una sbarra
conduttrice in moto su due guide anch'esse conduttrici e poste a distanza l. Il
circuito sia alimentato da un generatore di forza elettromotrice continua 0 e la
sbarra si muova, mantenendo il contatto elettrico con le guide, in una regione
ove esiste un campo magnetico uniforme diretto perpendicolarmente al piano
contenete il circuito, come mostrato in Fig. 11.2.
FIG.
11.2 - Sbarra conduttrice in moto.
Nella sbarra fluisce una corrente che ad un dato istante ha un valore I e
quindi su essa agisce una forza F = IBl risultante delle forze di Lorentz operanti
sugli elettroni costituenti la corrente. Per azione della forza F la sbarra subisce
una accelerazione e supponendo che in un certo istante sia v la sua velocità
abbiamo che il lavoro compiuto su essa nell'unità di tempo è Fv. Questo
11.3]
FLUSSO TAGLIATO E FLUSSO CONCATENATO
93
lavoro è compiuto dal generatore che quindi, indicando con R la resistenza del
circuito, fornisce una potenza:
(11.8)
Da questa espressione si ricava che la corrente I è inferiore al valore I0 = 0/R
che si avrebbe nel caso in cui la sbarra fosse fissa. Dividendo la (11.8) per RI
otteniamo :
(11.9)
da cui deduciamo che la variazione di corrente è uguale a:
(11.10)
Arriviamo così a determinare che sul circuito opera, oltre alla forza
elettromotrice
0,
anche una forza elettromotrice
Fv
che tende a far circolare
I
corrente in verso opposto a quello della corrente prodotta da
scrivere che:
0.
Possiamo allora
(11.11)
dove il segno meno sta ad indicare che la forza elettromotrice
forza elettromotrice
0.
è opposta alla
Dato poi che F=IlB si trova che:
(11.12)
e, poiché lds è uguale all'area da spazzata nell'unità di tempo dalla sbarra, la
(11.12) diviene infine:
(11.13)
dr
che è proprio l'espressione della forza elettromotrice derivante dalla legge di
Faraday-Neumann.
Il caso del flusso concatenato si ha quando sia il circuito in cui si induce la
corrente sia il circuito sorgente del campo magnetico sono fissi ed indeformabili e
la variazione del flusso è dovuto a variazioni di corrente. In questo caso la legge
di Faraday-Neumann non è più giustificabile mediante la forza di Lorentz ma
esprime qualche cosa di completamente nuovo.
94
L'INDUZIONE ELETTROMAGNETICA
11.4
[CAP. 11
Autoinduttanza
Prendiamo in esame un circuito rigido isolato stazionario percorso da corrente e consideriamo il flusso del campo magnetico generato dalla corrente e
concatenato con lo stesso circuito. Il flusso magnetico dipende dalla geometria
del circuito e dal valore della corrente e pertanto la sua variazione, se il circuito è
indeformabile, è dovuto alla variazione della corrente. Abbiamo cosi:
(11.14)
La quantità dΦ/dI è una costante caratteristica del circuito e se il flusso è
direttamente proporzionale alla corrente è uguale a Φ/I. Si definisce
autoinduttanza del circuito il rapporto:
(11.15)
Per la (11.14) e (11.15) la legge (11.1) diviene:
(11.16)
L'unità di misura dell'autoinduttanza nel sistema M.K.S. è denominata henry.
Dalla (11.15), tenendo conto che l'unità di misura del flusso di B è il weber e
quello della intensità di corrente è l'ampere, deriva che:
Un circuito pertanto ha autoinduttanza di un henry quando, essendo
concatenato da un flusso di induzione magnetica di un weber, in esso fluisce una
corrente di un ampere.
Come applicazione pratica della (11.15) calcoliamo il valore
dell'autoinduttanza di un solenoide di lunghezza l costituito da N spire per unità
di lunghezza percorse da una corrente I.
Supponendo che le dimensioni del solenoide siano tali da poter applicare
l'approssimazione di solenoide infinito, per il teorema della circuitazione di
Ampère si ottiene per il vettore induzione magnetica il valore:
B = μ0NI.
(11.17)
II flusso concatenato con ciascuna spira di superficie S del solenoide è:
Φ = μ0N I S
(11.18)
11.4]
AUTOINDUTTANZA
ed il flusso totale concatenato con tutte le NI spire vale:
Φ = μ0N2 I l S.
Per la (11.15) troviamo così che l'autoinduttanza del solenoide è:
L = μ0 N2 l S.
95
(11.19)
(11.20)
Prendendo N = 104 m-1, l = 0,1 m, S = π(10-2)2 m2 si ottiene una bobina con un
valore di autoinduttanza di circa 4 ⋅ 10-3 henry.
Un altro esempio interessante, anche per le applicazioni pratiche nel campo
delle trasmissioni delle radiofrequenze, è quello del sistema formato da due
cilindri coassiali conduttori di raggi a e b con a < b, come mostrato in Fig. 11.3.
FIG.
11.3 - Cilindri conduttori coassiali.
Sul cilindro conduttore interno scorre in ogni punto una corrente I mentre sul
conduttore esterno scorre una corrente di modulo uguale ma di verso opposto. Se
consideriamo una circonferenza di raggio r, avvolta intorno al conduttore interno,
con a < r < b, e calcoliamo lungo essa la circuitazione del vettore B, tenendo
conto che le linee di forza in questo caso sono circonferenze con centro sull'asse
del cilindro interno, si ha che:
(11.21)
Lo stesso calcolo eseguito lungo una circonferenza di raggio r >b, esterna cioè
al secondo conduttore, dà come risultato che il vettore B in punti esterni ai due
cilindri coassiali è dovunque nullo poiché la circonferenza concatena due correnti
di modulo uguale ma di verso opposto.
Il flusso di B attraverso la superficie S indicata in Fig. 11.3 vale:
(11.22)
dove a B si è sostituita l'espressione (11.21). Dalla (11.15) si determina quindi
96
L'INDUZIONE ELETTROMAGNETICA
[CAP. 11
che l'induttanza per unità di lunghezza del sistema dei due cilindri è:
(11.23)
11.5 Mutua induttanza
Al posto di un unico circuito isolato consideriamo ora il caso di n circuiti
ognuno percorso da corrente. Se allora indichiamo con Φij il flusso del vettore B
concatenato con l'i-esimo circuito prodotto dalla j-esimo circuito, possiamo
scrivere che il flusso totale concatenato con l'i-esimo circuito è:
(11.24)
La forza elettromotrice indotta sull'i-esimo circuito è pertanto data da:
(11.25)
Se ogni circuito è indeformabile in modo che, come già detto nel precedente
paragrafo, le variazioni di flusso siano dovute solo a variazioni di correnti, la
(11.25) si può anche scrivere nella forma:
(11.26)
Qualora il flusso dipenda linearmente dalla corrente, come è usuale che avvenga
in assenza di mezzi non lineari, le quantità dΦij /dIj sono uguali a Φij /dIj e risultano
costanti indipendenti dalla corrente. Si definisce mutua induttanza tra l'i-esimo ed il
j-esimo circuito il rapporto :
(11.27)
mentre la quantità dΦij /dIi rappresenta l'autoinduttanza dell'i-esimo circuito come è
stata definita nel paragrafo precedente.
Nel caso che il flusso dipenda linearmente dalla corrente, dalla (11.27) discende
che:
Φij = IjMij
(11.28)
e cioè che il flusso concatenato con l'i-esimo circuito dovuto al campo magnetico
prodotto dall'j-esimo è proporzionale alla corrente Ij che fluisce in quest'ultimo
tramite il loro coefficiente di mutua induttanza Mij.
11.6]
L'ENERGIA MAGNETICA
97
È possibile dimostrare che per i coefficienti di mutua induzione vale la
relazione Mij = Mji, e cioè che l'interazione tra due circuiti è la stessa sia che uno
di loro venga considerato come sistema attivo sia che esso venga considerato
come sistema passivo. Per provare quanto detto limitiamoci a considerare due soli
circuiti e ricordiamo che l'energia potenziale W di un circuito di superficie S
percorso da corrente I posto in un campo magnetico B, può essere scritta,
introducendo il momento magnetico dm = In da, nella forma:
(11.29)
L'energia potenziale del primo circuito dovuta al campo prodotto dal secondo è
allora:
W1 = -I1Φ12 = -I1I2 M12
(11.30)
dove si è tenuto conto che, per la (11.28), Φ12 = I2 M12
D'altra parte l'energia potenziale del secondo circuito dovuta al campo
prodotto dal primo è:
(11.31)
Dato che W1 è uguale a W2, eguagliando la (11.30) alla (11.31), arriviamo così
a dimostrare che M12 = M21.
11.6 L'energia magnetica
In questo paragrafo vogliamo fare qualche breve considerazione sull'energia
necessaria per produrre un campo magnetico di determinato valore in una regione
dello spazio. A tale scopo ci serviremo di un esempio del tutto particolare per poi
estrapolare il risultato ottenuto al caso generale.
Consideriamo un solenoide di lunghezza l e sezione S costituito da N spire di
filo conduttore per unità di lunghezza e sia R la resistenza totale
dell'avvolgimento. Se gli estremi del solenoide sono collegati ai poli di un
generatore di forza elettromotrice 0 nelle spire fluisce una corrente I.
Sul solenoide per effetto della variazione del flusso del campo magnetico,
inizialmente nullo, agisce una forza elettromotrice indotta S. La legge di Ohm
relativa al sistema assume pertanto la forma:
(11.32)
Poiché
= -dΦ (B)/dt la (11.32) diviene:
(11.33)
98
L'INDUZIONE ELETTROMAGNETICA
[CAP. 11
Durante un tempo dt attraverso il circuito passa una quantità di carica dq = I dt
ed il generatore conseguentemente compie un lavoro:
dW =
0I
dt = Id Φ + RI2dt.
(11.34)
Integrando questa espressione dall'istante iniziale t = 0, quando la corrente e il
campo magnetico nel solenoide sono nulli, ad un istante generico t1; al quale
corrisponde una data corrente I1 e un dato campo magnetico B1; abbiamo:
(11.35)
È facile riconoscere che il secondo termine a destra della (11.35) rappresenta
l'energia fornita dal generatore e dissipata in calore per effetto Joule dall'istante
iniziale fino all'istante t1. Il primo termine fornisce invece il lavoro Wm che il
generatore ha compiuto contro la forza elettromotrice indotta per portare la
corrente dal valore iniziale nullo al valore I1.
La variazione di flusso concatenato con le Nl spire del solenoide supposte
rigide è uguale a:
dΦ = N l S dB.
(11.36)
In un solenoide per il quale vale l'approssimazione di solenoide infinito, si ha
B = μ0 N I e quindi:
(11.37)
Sostituendo la (11.36) e la (11.37) nel primo integrale della (11.35) troviamo
che il lavoro compiuto dal generatore contro la forza elettromotrice indotta
risulta:
(11.38)
L'energia Wm fornita dal generatore 0 viene quindi utilizzata per creare un
campo magnetico di valore B1 all'interno del solenoide. Possiamo immaginare
così che questa energia, che chiameremo energia magnetica, si trovi localizzata
ove il campo B è diverso da zero, e cioè all'interno del solenoide. Essa sarà
disponibile per essere trasformata in altre forme di energia. Dato poi che lS
rappresenta il volume occupato dal solenoide, appare logico supporre che tale
energia magnetica sia distribuita all'interno del solenoide in maniera uniforme;
essa avrà quindi una densità volumetrica:
(11.39)
avendo utilizzato la relazione B = μ0H.
11.6]
L'ENERGIA MAGNETICA
99
Il risultato a cui siamo pervenuti con la (11.38) e la (11.39), anche se dedotto
per un caso particolare, è del tutto generale ed applicabile a qualunque problema
di magnetismo. Possiamo così affermare che l'energia necessaria per generare un
campo magnetico B in una regione di volume V è in generale data da :
(11.40)
e che questa energia, sotto forma di energia magnetica, si trova distribuita nel
volume V con una densità data dalla (11.39). L'espressione (11.39) resta valida
anche nel caso in cui si sia in presenza di mezzi materiali, purché siano lineari,
avendo supposto che il flusso di B è linearmente proporzionale alla corrente. Per
un materiale isotropo lineare di permeabilità magnetica μ. essa si riduce alla
forma:
(11.41)
Può essere inoltre interessante vedere come l'energia magnetica
immagazzinata in un avvolgimento, quale ad esempio il solenoide già preso in
considerazione all'inizio di questo paragrafo, possa essere espressa in funzione
del valore dell'autoinduttanza. Nella (11.32) la frazione di energia erogata dal
generatore e immagazzinata sotto forma di energia magnetica è data
dall'integrale:
(11.42)
Per la (11.15) sappiamo inoltre che dΦ = Ld I, per cui:
(11.43)
Più in generale, prendendo spunto dal risultato della (11.43), possiamo dire
che l'energia magnetica spesa in un circuito di autoinduttanza L per portare la
corrente dal valore zero ad un dato valore I è uguale al semiprodotto del quadrato
dell'intensità di corrente per l'autoinduttanza del circuito, cioè:
(11.44)
12
Circuiti in corrente continua ed alternata
12.1
Introduzione
Una rete o circuito elettrico consiste in un insieme di conduttori e generatori di
forze elettromotrici collegati tra loro allo scopo di trasferire dell'energia elettrica
da un punto ad un altro. Per quanto riguarda quello che esporremo in questo
capitolo, assumeremo che l'energia fornita dai generatori al sistema o venga
dissipata per effetto Joule oppure venga immagazzinata sotto forma di energia
elettrica e magnetica. Nel caso di correnti variabili nel tempo(1) considereremo
quindi trascurabile qualunque perdita di energia per irraggiamento
elettromagnetico, che d'altra parte diviene significativa solo a frequenze
sufficientemente alte o per sistemi appositamente progettati.
Questa ultima ipotesi risulta in effetti di importanza rilevante in quanto ci
permette di elaborare per i circuiti elettrici una teoria basata su concetti integrali,
come il potenziale, la corrente, il flusso magnetico, la carica in luogo del campo
elettrico, della densità di corrente, del campo magnetico, della densità di carica e
di rappresentare così i conduttori facenti parte di un circuito mediante grandezze
macroscopiche come la resistenza, la capacità e l'induttanza senza essere obbligati
ad introdurre le loro proprietà microscopiche.
Verranno analizzati circuiti risultanti dalla combinazione di generatori di forze
elettromotrici costanti o variabili nel tempo, i cosiddetti elementi attivi,
(1) In molti testi questa limitazione viene introdotta accennando al fatto che la teoria
sviluppata resta valida solo nel caso di fenomeni lentamente variabili nel tempo.
Affermazioni di questo genere appariranno più chiare dopo la lettura del Capitolo 13.
102
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
e di resistori, condensatori o induttori, gli elementi passivi, che supporremo
concentrati in determinati punti del circuito e collegati tra loro, nella maniera più
varia ma sempre in modo da formare cammini chiusi, mediante fili conduttori la
cui resistenza verrà considerata nulla.
I componenti fisici reali di un circuito saranno rappresentati mediante elementi
ideali, intendendo come tali degli elementi caratterizzati unicamente dalla
grandezza attinente al loro nome particolare. Questo significa per esempio che un
resistore sarà caratterizzato solo dal valore della sue resistenza, un capacitore solo
dal valore della sua capacità, un induttore solo dal valore della sua induttanza. Se
vorremo tener conto del fatto che un resistore reale presenta oltre che una certa
resistenza anche un piccolo valore di capacità ed induttanza dovremo considerare
nello schema del circuito non soltanto un resistore ma anche un induttore ed un
capacitore collegati tra loro in modo opportuno.
Come ultima restrizione va ricordato che supporremo i valori delle resistenze,
induttanze e capacità costanti, e che pertanto per tutti gli elementi dei circuiti
verrà assunto un comportamento lineare.
Dal paragrafo 12.2 al paragrafo 12.7 tratteremo solamente problemi
riguardanti correnti continue e saremo quindi interessati a circuiti formati
unicamente da resistori ideali e da generatori di forze elettromotrici costanti.
Nei paragrafi successivi affronteremo invece problemi relativi a situazioni
variabili nel tempo e in particolare a circuiti percorsi da correnti alternate.
12.2 Generatori di tensione e di correnti costanti
Si definisce generatore ideale di tensione una sorgente capace di fornire una
differenza di potenziale costante, uguale alla sua forza elettromotrice,
indipendentemente dalla corrente che circola nel circuito interposto tra i suoi poli.
Questo tipo di sorgente viene detto ideale perché, come abbiamo visto nel
paragrafo 7.9, ogni generatore reale presenta un comportamento assai diverso.
Sappiamo infatti che la differenza di potenziale (1) ai terminali di un generatore di
forza elettromotrice
I, è uguale a:
0
e di resistenza interna r, quando esso eroga una corrente
(12.1)
Appare allora evidente che un generatore reale può essere schematizzato come
un generatore ideale di tensione con una resistenza r in serie, come è
rappresentato in Fig. 12.1a). Dalla (12.1) risulta inoltre che la differenza di
potenziale tra i poli del generatore coincide con la sua forza elettromotrice solo
nel caso in cui I = 0, cioè solo a circuito aperto.
Per un'analisi delle reti resistive è importante introdurre un ulteriore concetto,
cioè quello di generatore ideale di corrente. Si chiama generatore ideale di
corrente
(1) In questo capitolo, come in quello sulle correnti continue, indicheremo il potenziale
con il simbolo V e la differenza di potenziale con Δ V.
12.3]
LE LEGGI DI KIRCHHOFF
103
FIG.
12.1 - Rappresentazione di un generatore di forza elettromotrice £0.
a) come un generatore di tensione costante
b) come un generatore di corrente costante.
una sorgente capace di fornire una corrente costante indipendentemente dalla
differenza di potenziale esistente tra i suoi estremi. Assunta questa definizione è
possibile dimostrare che un generatore reale di forza elettromotrice
0
e
resistenza interna r è equivalente a un generatore ideale di corrente I0 = 0/r in
parallelo con una resistenza r, secondo lo schema di Fig. 12.1 b). Immaginando
infatti di inserire tra i terminali del generatore di corrente I0 un carico, che
lasciamo completamente indeterminato, nel quale circoli una corrente I, in base
allo schema di Fig. 12.1 b) si ha, dato che la corrente I0 fornita dal generatore si
ripartisce proporzionalmente tra r ed il carico esterno, che la differenza di
potenziale tra gli estremi del generatore risulta:
ΔV = (I0 - I) r.
(12.2)
Nel caso di circuito aperto, quando cioè I = 0, si ha che ΔV=I0r =
Possiamo così scrivere la (12.2) nella forma:
0.
(12.3)
identica alla (12.1).
Negli esempi che saranno presentati nei paragrafi seguenti considereremo i
generatori sempre come generatori ideali e assumeremo che la resistenza interna
corrispondente ad ogni generatore sia rappresentata da una elemento della rete
anche se non verrà esplicitamente indicato come tale.
12.3 Le leggi di Kirchhoff
Prima di affrontare il problema riguardante le reti resistive vogliamo dare la
definizione di tre termini di cui faremo frequente uso in seguito. Chiameremo
nodo un punto di connessione tra tre o più elementi della rete, ramo l'insieme
degli elementi collegati in serie posti tra due nodi, e infine maglia un percorso
chiuso formato da elementi della rete. Nel circuito di Fig. 12.2, per esempio, i
punti
104
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
A, B, C e D sono dei nodi, gli elementi compresi tra A e D formano un ramo,
mentre il percorso chiuso ACDA costituisce una maglia.
L'analisi di una rete resistiva consiste nella determinazione dei valori delle
correnti che attraversano tutti i singoli elementi che la compongono o ugualmente
nella determinazione delle differenze di potenziale esistenti tra gli estremi degli
stessi elementi. In generale tale analisi, sia per le complesse connessioni che si
possono verificare tra i resistori sia per l'esistenza di generatori di forze
elettromotrici in punti diversi della rete, non può essere condotta semplicemente
scomponendo la rete nei suoi elementi in serie e in parallelo, ma deve
necessariamente fare ricorso ad un metodo più sistematico basato su un opportuno
insieme di equazioni per le correnti o per le tensioni incognite. Il metodo è
chiamato metodo di Kirchhoff e si fonda su due leggi dette leggi di Kirchhoff. Tali
leggi, note rispettivamente come legge dei nodi e legge delle maglie, si enunciano
nella seguente maniera:
1 ) La somma delle intensità delle correnti entranti in un nodo è uguale alla
somma delle intensità delle correnti uscenti dallo stesso nodo.
2) La somma algebrica (nel senso che verrà precisato) delle forze elettromotrici
contenute in una maglia, è uguale alla somma delle differenze di potenziale ai
capi di ciascuno degli elementi della maglia.
Più in particolare possiamo dire che la prima legge esprime il principio della
continuità della corrente, e cioè che le cariche non si creano e non si distruggono,
e che la seconda rappresenta la natura conservativa del campo elettrostatico, e
cioè che la variazione totale del potenziale su un cammino chiuso è uguale a zero.
Partendo da queste due leggi esistono differenti maniere per scrivere il sistema di
equazioni atto a determinare le incognite del problema. Noi illustreremo
successivamente, utilizzando sempre lo stesso circuito come esempio, tre metodi
distinti, quello delle correnti dei rami, quello delle correnti delle maglie ed infine
quello delle tensioni dei nodi.
12.4 II metodo delle correnti dei rami
Il metodo delle correnti dei rami consiste, assegnato ad ogni singolo ramo un
simbolo ed una direzione per la corrente e fissato un verso di percorrenza per le
maglie, nel ricavare dalle leggi di Kirchhoff due sistemi di equazioni per le
correnti. Per illustrarne l'applicazione utilizzeremo l'esempio di Fig. 12.2, dove
abbiamo indicato con l1, I2,..., I6 le correnti incognite dei rami e abbiamo scelto
per tutte le maglie come verso di percorrenza quello antiorario.
L'applicazione della prima legge di Kirchhoff ai nodi A, B, C e D del circuito
di Fig. 12.2 fornisce rispettivamente le seguenti relazioni:
(a) I1=I3 + I5
(b) I2=I3 + I6
(c) I5=I4 + I6
(d) I1=I2 + I4
12.3]
IL METODO DELLE CORRENTI DEI RAMI
105
L'applicazione della seconda legge di Kirchhoff richiede qualche ulteriore
considerazione. Innanzitutto nello scrivere le equazioni per ogni maglia bisogna
fare attenzione a prendere la caduta di potenziale RI ai capi di ogni resistore con il
segno positivo o negativo a seconda che la corrente del ramo percorra il resistore
in verso concorde o discorde a quello scelto come verso di percorrenza della
maglia. Se il valore di una corrente di ramo risulta avere, alla fine del calcolo,
segno negativo significa che la corrente circola in quel ramo in verso opposto a
quello scelto inizialmente. In secondo luogo bisogna ricordare che
FIG. 12.2
- Rete resistiva. Analisi mediante le correnti dei rami.
le forze elettromotrici vanno considerate con segno positivo o negativo a seconda
che esse tendano a fare circolare la corrente nello stesso verso o in verso opposto
a quello scelto come verso di percorrenza delle maglie. Sono da considerarsi così
con segno positivo le forze elettromotrici che, seguendo il verso di percorrenza
fissato per le maglie, vengono attraversate passando lungo il circuito dal polo
negativo a quello positivo dei rispettivi generatori. Tenuto conto di quanto detto,
abbiamo allora che la seconda legge di Kirchhoff fornisce per la maglia ADCA la
relazione:
(A D C A)
Il Rl+I5 R5 + I4 R4.= -
(12.5a)
1
e per le altre maglie:
(A C B A)
I3 R3 - I5 R5 - I6R6 = 0
(12.5b)
(C D B C)
I2R2 – I4R4 + I6R6 =
2
(A D B A)
IlRl + I2R2 + I3R3=-
1+
(A D B C A)
I1R1+I2R2 + I5R5 + I6R6= -
(12.5c)
(12.5d)
2
1+
2
(12.5e)
106
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
(A C D B A)
I2R2 + I3R3 - I4R4 - I5R5=
2
(A D C B A)
I1Rl + I3R3 + I4R4 - I6R6= -
1
[CAP. 12
(12.50)
(12.5g)
Esaminando le equazioni dei sistemi (12.4) e (12.5) è facile constatare come
esse non siano tutte indipendenti tra loro. Si vede per esempio che dalle equazioni
(12.4) risulta essere (a) = (b) - (c) + (d) e che dalle equazioni (12.5) risulta essere
(a) + (b) + (c) = (d).
È possibile infatti dimostrare che in generale per una rete resistiva il numero di
equazioni indipendenti per i nodi è (Nn - 1), dove Nn rappresenta il numero di nodi
della rete, e che il numero di equazioni indipendenti per le maglie è uguale al
numero Nm di maglie indipendenti della rete (1) Il numero totale di equazioni
indipendenti risulta cosi essere (Nm + Nn - 1). D'altra parte, poiché si può anche
provare che il numero totale dei rami di una rete resistiva è (Nm + Nn - 1),
abbiamo che il numero delle correnti incognite risulta uguale al numero di
equazioni indipendenti.
Nel caso dell'esempio di Fig. 12.2 il numero dei nodi è 4 ed il numero di
maglie indipendenti 3 ; il numero di equazioni indipendenti è allora 6, che
coincide con il numero delle correnti incognite dei rami da noi prese in
considerazione.
12.5 II metodo delle correnti di maglia
Un diverso metodo di analisi di una rete resistiva, che in confronto al metodo
delle correnti dei rami esposto nel precedente paragrafo risulta più semplice
coinvolgendo un numero di equazioni minore, è quello delle correnti di maglia.
Per illustrare l'applicazione di questo metodo riprendiamo in esame il circuito di
Fig. 12.2 ed indichiamo con I1; I2 ed I3 le correnti che fluiscono in ciascuna delle
tre maglie indipendenti del circuito secondo il verso indicato in Fig. 12.3.
Poiché con questa scelta ognuna delle correnti di maglia è sia entrante sia
uscente da ciascun nodo che incontra lungo il suo cammino, la prima legge di
Kirchhoff risulta automaticamente soddisfatta, con il risultato che per risolvere il
problema della determinazione delle correnti incognite in luogo di (Nm + Nn -1)
equazioni abbiamo ora a che fare solo con Nm equazioni indipendenti. Per il
circuito di Fig. 12.3 si devono considerare al posto delle 6 equazioni che
risultavano necessarie applicando il metodo delle correnti di ramo, solamente le
seguenti 3 equazioni ricavate dalla seconda legge di Kirchhoff:
(A D C A)
I1R1 + (I1 - I2) R4 + (I1 - I3) R5 = -
(B C D B)
(A C B A)
I2R2 + (I2 - I1) R4 + (I2 - I3) R6 =
I3R3 + (I3 - I1) R5 + (I3 - I2) R6 = 0
1
2
(12.6)
(1) Si definisce maglia indipendente una maglia che non sia ottenibile come somma di
altre maglie.
12.5]
IL METODO DELLE CORRENTI DI MAGLIA
107
FIG. 12.3 - Analisi mediante le correnti di maglia.
che si possono anche scrivere:
I1 (R1 + R4 + R5) - I2R4 - I3R5 = -
1
- I1 R4 + I2(R2 + R4 + R6) – I3R6 = 2
- I1 R5 + I2R6 + I3(R3 + R5 + R6) = 0
(12.7)
Se per semplicità di calcolo poniamo R11 = (R1 + R4 + R5), R22 = (R2 + R4 + R6),
R33 = (R3 + R5 + R6), R12 = R21 = - R4, R13 = R31 = - R5 ed R23 = R32 = - R6, il
sistema (12.7) può essere scritto in maniera più compatta nella forma:
I1 R11 + I2 R12 + I3R13 = -
1
- I1 R21 + I2R22 + I3R23 = 2
(12.7)
I1 R31 + I2R32 + I3R33 = 0
Questo sistema può essere risolto operando successive sostituzioni di variabile
ma, come è facile riscontrare già nel caso del nostro esempio che è pure tra i più
semplici, un tale metodo di soluzione appare estremamente lungo e laborioso;
ancora più lo sarebbe per un circuito formato da un numero di maglie indpendenti
maggiore di tre.
Risulta in generale pertanto più conveniente risolvere il sistema (12.8) mediante la
teoria dei determinanti e la regola Cramer. Secondo questa regola, se noi
indichiamo con Δ il determinante formato dei coefficienti Rij delle correnti e con Δ
sostituendo la colonna i-esima dei coefficienti con la colonna delle forze
elettromotrici, si ha che la corrente i-esima è data da
(12.9)
108
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
In particolare per il nostro circuito avremo che la corrente I1 risulta uguale a :
(12.10)
che, ricordando la regola per il calcolo dei determinanti di terzo ordine, diviene :
(12.11)
dove:
(12.12)
Analogamente può essere eseguito il calcolo esplicito delle espressioni per le
rimanenti correnti, I2 ed I3.
Vanno sottolineate alcune caratteristiche generali, che risultano importanti per
l'analisi del comportamento delle reti resistive. Innanzitutto va notato come nella
relazione (12.11) la corrente I1 risulti una funzione lineare delle forze
elettromotrici. Questo significa in altre parole che ogni corrente che fluisce in un
ramo o in una maglia della rete è la somma delle correnti che circolerebbero se
ogni forza elettromotrice operasse singolarmente. Questa affermazione rappresenta
il cosiddetto teorema di sovrapposizione per le reti in corrente continua con forze
elettromotrici costanti, ed è una conseguenza della linearità assunta inizialmente
per gli elementi singoli della rete. Tale proprietà permette di affrontare l'analisi di
una rete anche in modo differente da quello precedentemente seguito. Potremmo
cioè risolvere successivamente problemi separati assumendo di volta in volta che
solo una delle forze elettromotrici della rete sia diversa da zero, calcolare i valori
delle correnti ed ottenere il risultato finale per ciascuna corrente sommando le
soluzioni trovate in maniera indipendente.
Un'altra importante considerazione consegue dalla osservazione che il
determinante A dei coefficienti del sistema (12.8) risulta simmetrico rispetto alla
diagonale principale (Rij = Rji). Ricordando che i coefficienti Rij (con i ≠ j)
rappresentano gli elementi del circuito in comune tra due maglie possiamo
formulare il teorema di reciprocità secondo il quale la corrente prodotta per
esempio nella maglia uno da una forza elettromotrice posta nella maglia due è
uguale alla corrente prodotta nella maglia due dalla stessa forza elettromotrice posta
nella maglia uno. I coefficienti Rij con i ≠ j prendono il nome di mutue resistenze tra
la maglia i-esima e j-esima, mentre i coefficienti Rij con i = j, che rappresentano la
resistenza totale incontrata dalla i-esima corrente nell'i-esima maglia, prendono il
nome di autoresistenze della i-esima maglia.
12.6]
12.6
METODO DEI NODI
109
Metodo dei nodi
L'analisi di una rete resistiva può in taluni casi, qualora risulti più semplice,
essere compiuta con riferimento ai nodi piuttosto che alle maglie. Per ogni elemento
resistivo del circuito sappiamo che vale la legge di Ohm ΔV = RI che, introducendo
la conduttanza G =1/R, può anche scriversi nella forma I = ΔVG.
Sfruttando questa relazione è possibile eseguire lo studio di una rete
considerando differenze di potenziale al posto di correnti, generatori di corrente al
posto di generatori di tensione e conduttanze al posto di resistenze.
Prendiamo ancora in esame come esempio il circuito utilizzato precedentemente.
Tale circuito può essere rappresentato secondo lo schema di Fig. 12.4
FIG. 12.4
- Analisi mediante il metodo della tensione dei nodi.
dove abbiamo sostituito ai generatori di tensione opportuni generatori di corrente
ed indicato i singoli conduttori della rete invece che con i valori delle loro
resistenze mediante i valori corrispondenti delle conduttanze. Poiché hanno
significato fisico solo le differenze di potenziale, possiamo assumere il potenziale
di uno dei nodi, per esempio il nodo D, come potenziale di riferimento, che per
comodità supporremo uguale a zero. Segue immediatamente che la legge di
Kirchhoff sulle maglie risulta soddisfatta, mentre dalla legge di Kirchhoff sui nodi
è possibile ricavare (Nn - 1) equazioni indipendenti. Per il circuito di Fig. 12.4,
comprendente quattro nodi, abbiamo tre equazioni indipendenti. Indicando con V1
V2 e V3 rispettivamente i potenziali dei nodi A, E e C e ricordando che il potenziale
in D è stato preso uguale a zero, esse sono:
nodo A
I01 = V1 G1 + (Vl - V2) G3 + (V1 - V3) G5
nodo B
I02 = V2 G2 + (V2 - Vl) G3 + (V2 - V3) G6
nodo C
0 = V3G4 + (V3 - V1) G5 + (V3 - V2) G6
(12.13)
110
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
ovvero :
(12.14)
È ora possibile mediante il metodo di Cramer ricavare i valori delle tensioni
dei nodi e poi risalire tramite la legge di Ohm ai valori delle correnti circolanti in
ogni resistore. Generalizzando quanto sopra esposto possiamo dire che per
l'analisi di una rete contenete Nn nodi valgono le seguenti regole:
a) scegliere innanzitutto un nodo di riferimento rispetto al quale riferire i
potenziali di tutti gli altri nodi;
b) nell'equazione per un dato nodo il coefficiente del potenziale di quel nodo deve
essere la somma delle conduttanze connesse a quel nodo; il coefficiente del
potenziale degli altri nodi deve essere sempre negativo e uguale alla
conduttanza connessa tra essi ed il nodo in questione;
c) la soluzione generale è del tipo:
(12.15)
dove Δ rappresenta il determinante dei coefficienti del sistema di equazioni per
Nn nodi e Δi è il determinante che si ottiene da Δ sostituendo la i-esima colonna
con la colonna dei termini noti (le correnti dei generatori) del sistema.
12.7 Il teorema di Thevenin
Un teorema in molti casi utile per lo studio dei circuiti resistivi è il teorema di
Thevenin. Questo teorema afferma che qualunque combinazione di resistori e di
generatori di forze elettromotrici avente due terminali può essere rappresentata
in maniera equivalente come un generatore di forza elettromotrice ed una
resistenza in serie.
Per provare la validità di questo teorema riferiamoci come esempio alla rete
del tutto arbitraria di Fig. 12.5a). Immaginiamo che essa sia contenuta in una
scatola chiusa da cui escano due terminali attraverso i quali, quando fra essi sia
inserito un generico carico, fluisca una corrente I ed esista una differenza di
potenziale ΔV.
Utilizzando il metodo delle maglie e considerando la differenza di potenziale
A V tra i due terminali come un generatore di forza elettromotrice, siamo in grado
di determinare il valore della corrente I. Nel paragrafo 12.5, e precisamente con la
relazione (12.11), abbiamo visto infatti che in generale ogni corrente è una
funzione lineare delle forze elettromotrici contenute nella rete con coefficienti che
dipendono dai valori delle resistenze. Immaginiamo allora che la rete in esame sia
formata da n forze elettromotrici, 1, 2, ...,
, R2,..., Rm, con n ed m qualsiasi, e prendiamo
n,
e da m resistori di resistenza R1
12.7]
FIG. 12.5
IL TEOREMA DI THEVENIN
111
- a) rete resistiva
b) circuito equivalente secondo il teorema di Thevenin.
ΔV come una caduta di potenziale nel verso scelto per I come positivo, quindi con il
segno negativo. Potremo scrivere che:
(12.16)
dove G1, G2,..., Gn e g sono dei coefficienti che hanno le dimensioni dell'inverso di
una resistenza. Risolvendo la (12.16) rispetto a ΔV, otteniamo:
(12.17)
Se poi poniamo:
(12.18)
ed:
(12.19)
la (12.17) diviene :
(12.20)
che è proprio, come volevamo dimostrare, l'espressione già nota della differenza di
potenziale esistente tra i terminali di un circuito formato da un generatore di forza
elettromotrice
ed una resistenza r in serie, come quello mostrato in Fig. 12.5b).
112
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
Una delle applicazioni più importanti del teorema di Thevenin è legata al
calcolo della potenza trasferita da un circuito attivo, un circuito cioè contenente
forze elettromotrici, ad un carico o ad un circuito passivo, privo cioè di forze
elettromotrici. Nel paragrafo 7.10 abbiamo dimostrato come il massimo
trasferimento di potenza tra un generatore di resistenza interna r ed un carico di
resistenza R si ha quando r = R. Dall'equivalenza, precedentemente dimostrata,
della rete di Fig. 12.5a) con quella di Fig. 12.5b), composta da un generatore e da
una resistenza r in serie, deriva immediatamente che il massimo trasferimento di
potenza dal circuito attivo di Fig. 12.5a) ad un carico R, che potremmo inserire tra
i suoi terminali, si ha nel caso in cui r = R. (1)
Quando tale condizione è verificata si dice che generatore e carico sono
adattati. Questa condizione risulta ancora più importante nei circuiti in corrente
alternata dove dall'adattamento tra la resistenza interna del generatore e quella del
carico non dipende solo il massimo trasferimento di potenza ma anche, per esempio, la risposta in frequenza e la linearità.
12.8
Fenomeni transitori
Finora sono stati considerati circuiti alimentati da forze elettromotrici costanti
e formati solamente da resistori. Vogliamo adesso esaminare circuiti alimentati da
forze elettromotrici costanti o variabili nel tempo in maniera periodica contenenti,
oltre che resistori, anche condensatori ed induttori. Quello che si osserva in
circuiti di questo genere è che, indipendentemente dal tipo di forza elettromotrice
ad esso applicata, la corrente che si instaura nel circuito presenta sempre
inizialmente un comportamento variabile nel tempo, non periodico, detto
comportamento transitorio. Solo a partire da un certo istante la corrente assume
un comportamento stazionario, e cioè nel caso di circuiti alimentati da generatori
di forza elettromotrice costante, la corrente ha un andamento costante, mentre nel
caso di circuiti alimentati da generatori di forza elettromotrice variabile nel tempo
in modo periodico la corrente ha un andamento periodico analogo. In realtà questa
affermazione non è completamente esatta perché, come vedremo, il
comportamento stazionario a tutto rigore viene raggiunto dalla corrente solo dopo
un tempo infinitamente lungo. Tuttavia, dopo un conveniente intervallo di tempo,
è possibile considerare l'andamento della corrente stazionario entro
l'approssimazione desiderata.
Il problema che si pone a questo punto è di vedere in quale modo debbano
essere generalizzate le leggi di Kirchhoff, introdotte nei paragrafi precedenti, per
poter essere utilizzate nell'analisi dei circuiti percorsi da correnti variabili nel
tempo.
Sembra evidente che la prima legge di Kirchhoff, secondo la quale è impossibile che in un punto di un circuito percorso da corrente si formi un accumulo
(1) Per generatori con bassa resistenza interna non è possibile assorbire la massima
potenza senza danneggiare lo stesso generatore. Questa legge riveste quindi un interesse
pratico nel caso di generatori con un'alta resistenza interna.
12.8]
FENOMENI TRANSITORI
113
di carica, resti valida qualora venga applicata ai valori delle correnti che fluiscono
nel circuito istante per istante.
Essa si enuncia allora dicendo che:
1) la somma delle intensità di corrente istantanee entranti in un nodo è
uguale alla somma delle intensità di correnti istantanee uscenti dallo stesso
nodo.
La presenza di condensatori nel circuito non invalida questa affermazione. In
effetti sulle due armature di un condensatore si accumulano delle quantità di
carica ma esse sono di segno opposto e uguale in modulo per cui non si manifesta
alcun eccesso di carica di dato segno.
La seconda legge di Kirchhoff riguarda invece la conservazione della energia;
essa afferma che la variazione di potenziale lungo una maglia percorsa da
corrente deve essere uguale a zero. Se nel circuito sono presenti non solo resistori
ma anche condensatori ed induttori l'energia fornita dai generatori di forza
elettromotrice non soltanto fa circolare le cariche nei conduttori ma produce anche campi elettrici e magnetici, a causa della presenza dei condensatori e degli
induttori. Si ha cosi che l'energia erogata dai generatori è in parte dissipata sotto
forma di calore nei resistori ed in parte immagazzinata come energia potenziale in
condensatori ed induttori. Una singola carica che compia il percorso chiuso di una
maglia del circuito non può presentare, quando torni al punto di partenza, né un
guadagno né una diminuzione d'energia. Affinchè allora la variazione totale del
potenziale lungo la maglia sia uguale a zero, come espresso dalla seconda legge
di Kirchhoff, bisogna considerare non solo le forze elettromotrici e le cadute RI di
potenziale ai capi dei resistori ma anche la differenza di potenziale ai capi dei
condensatori e degli induttori. Poiché le differenze di potenziale dovute a
resistori, condensatori ed induttori, tendono ad opporsi al passaggio delle correnti
prodotte dai generatori, le indicheremo genericamente con il termine di forze
controelettromotrici. Tenendo conto inoltre del fatto che i valori delle correnti,
delle forze elettromotrici e delle forze contro-elettromotrici vanno considerati
tutti allo stesso istante, la seconda legge di Kirchhoff si esprime dicendo che:
2) la somma algebrica delle forze elettromotrici istantanee contenute in una
maglia è uguale alla somma delle forze controelettromotrici istantanee
contenute nella stessa maglia.
Per quanto riguarda le modalità con le quali va scelto il segno nelle somme
delle forze elettromotrici e controelettromotrici vale quello che è stato detto per i
circuiti resistivi in corrente continua e cioè che il segno viene determinato
considerando il verso di percorrenza delle maglie scelto a priori.
Come esempio di comportamento transitorio consideriamo ora tre semplici
circuiti alimentati da generatori di forza elettromotrice costante.
12.8.1 Circuito R-L in serie
Sia dato il circuito R-L di Fig. 12.6 alimentato da un generatore di forza
elettromotrice costante
Per questo circuito la seconda legge di Kirchhoff
114
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
fornisce la relazione, valida ad un generico istante t:
(12.21)
Il secondo termine a destra di questa espressione rappresenta la differenza di
potenziale ai capi dell'induttanza che è uguale alla forza elettromotrice indotta
nell'induttanza - LdI/dt cambiata di segno, dato che nella legge di Kirchhoff essa
viene considerata non tra le forze elettromotrici ma tra quelle controelettromotrici.
FIG. 12.6
- Circuito R-L in serie con generatore di forza elettromotrice costante.
L'equazione (12.21) può essere scritta nella forma:
(12.22)
ed integrata tra l'istante iniziale t = 0, corrispondente alla chiusura dell'interruttore
S, ed un generico istante t. Otteniamo così:
essendo C una costante di integrazione.
scriversi :
(12.23)
La formula precedente può anche
(12.24)
La costante A può essere determinata tenendo conto che per t = 0, al momento
cioè della chiusura dell'interruttore, si ha I = 0, per cui
pertanto in definitiva:
/R – A = 0. Si ha
(12.25)
12.8]
FENOMENI TRANSITORI
115
dove /R rappresenta il valore della corrente che si instaura dopo un tempo
infinito. La quantità L/R indicata spesso con τ, viene chiamata costante dì tempo
del circuito e rappresenta il tempo necessario alla corrente per divenire uguale ad
(1 - 1/e) volte il valore finale /R (circa il 63 % del valore finale). In un circuito
quindi a parità di resistenza il tempo impiegato dalla corrente per raggiungere il
suo valore stazionario è tanto maggiore quanto è maggiore il valore
dell'induttanza. L'induttanza limita così la rapidità di crescita della corrente.
Dopo un intervallo di tempo pari a cinque costanti di tempo il valore della
corrente diviene uguale a 0,993 volte il suo valore finale. Si commette quindi un
errore del 7 0 00 , affermando che in tale istante la corrente è uguale al suo valore
massimo
/R ed entro questa approssimazione la corrente può essere
considerata stazionaria. (Per un circuito formato da una resistenza di 1000 Ω ed
una induttanza di 1 mH la costante di tempo vale 10-6 secondi). L'andamento
della corrente nel circuito R -L è quello mostrato in Fig. 12.7.
FIG.
12.7 - Andamento in funzione del tempo della corrente del circuito della figura
precedente (τ = L/K).
La pendenza dI/dt nell'istante iniziale vale 1/τ ( /R). Questo significa che se
la corrente continuasse ad aumentare con la stessa velocità raggiungerebbe il suo
valore finale in un tempo uguale ad una costante di tempo τ.
Se ad un determinato istante l'interruttore del circuito venisse aperto, tra le sue
estremità si genererebbe una differenza di potenziale dovuta alla forza
elettromotrice indotta che tenderebbe a mantenere la corrente. Questa differenza
di potenziale, se sufficientemente alta, potrebbe produrre un arco tra gli estremi
dell'interruttore attraverso il quale fluirebbe la corrente. Nel caso di un solenoide
di 10 mH di induttanza percorso da una corrente di 1000 A in cui si riducesse a
zero la corrente in 1 ms, si produrrebbe tra gli estremi dell'interruttore una
differenza di potenziale di 10 KV.
116
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
12.8.2 Circuito R-C in serie
Come secondo esempio prendiamo in esame il circuito in serie R-C alimentato
da un generatore di forza elettromotrice costante
FIG. 12.8
, mostrato in Fig. 12.8.
- Circuito R-C in serie con generatore di forza elettromotrice costante.
Per questo circuito la seconda legge di Kirchhoff fornisce, per un istante
qualsiasi dopo la chiusura dell'interruttore S, la relazione:
(12.26)
La quantità q (t) / C rappresenta la differenza di potenziale ai capi del
condensatore all'istante t e q(t) è la carica accumulata nel condensatore allo stesso
istante. La caduta di potenziale, come per il resistore, è nella direzione della
corrente.
Poiché I =
dq
la (12.26) può essere scritta come:
dt
(12.27)
o anche:
(12.28)
Integrando la (12.28) tra l'istante t = 0 in cui si chiude il circuito ed un istante
generico t otteniamo:
(12.29)
La costante contenuta in questa espressione viene determinata tenendo conto
che per t = 0 si ha q = 0, essendo il condensatore scarico al momento
12.8]
FENOMENI TRANSITORI
117
della chiusura dell'interruttore. La (12.29) diviene allora:
(12.30)
e la corrente che fluisce nel circuito è:
(12.31)
Facciamo notare che /R è la corrente che si stabilirebbe nel circuito nel caso
in cui il condensatore fosse cortocircuitato. La quantità RC viene chiamata
costante di tempo del circuito e rappresenta il tempo necessario alla corrente per
diminuire di un e-esimo. Dopo un tempo dell'ordine di 5 costanti di tempo la
corrente nel circuito può essere considerata praticamente nulla ed il condensatore
carico, anche se in teoria ciò accade in un tempo infinito. In Fig. 12.9 è
rappresentato l'andamento della corrente che fluisce nel circuito in funzione del
tempo.
FIG. 12.9
- Andamento temporale della corrente del circuito di Fig. 12.8 (τ = RC).
Come ulteriore esercizio immaginiamo di cortocircuitare il generatore di Fig.
12.8 dopo aver caricato il condensatore. Per ogni istante successivo a questa
operazione vale l'espressione:
(12.32)
che è analoga alla (12.26), ad eccezione del termine a destra.
Mediante lo stesso metodo utilizzato precedentemente e tenendo conto che
all'istante in cui il generatore viene cortocircuitato sulle armature del condensatore
118
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
si ha q =
[CAP. 12
C, otteniamo che :
(12.33)
la quale fornisce la legge di scarica del condensatore. Anche in questo caso dopo
un tempo pari a 5 o 6 costanti di tempo si può praticamente considerare il
condensatore scarico.
12.8.3
Circuito R-L-C in serie
Consideriamo infine il circuito composto da una resistenza R, una induttanza L
ed una capacità C in serie, mostrato in Fig. 12.10. Immaginiamo di aver caricato il
condensatore con una carica q0, cui corrisponde una differenza di potenziale tra le
armature Δ V0, e di chiudere successivamente l'interruttore S del circuito ad un
istante che assumeremo come t = 0.
FIG. 12.10
- Circuito R-L-C in serie.
Il condensatore nel circuito compie le funzioni di un generatore di forza
elettromotrice con una differenza di potenziale variabile nel tempo, man mano
che esso si scarica. Dalla seconda legge di Kirchhoff si ricava l'equazione del
circuito :
(12.34)
o, tenendo conto che ΔV è legato alla carica del condensatore in ogni istante dalla
relazione ΔV=q/C, anche:
(12.35)
Se deriviamo la (12.35) rispetto al tempo e consideriamo che /= -dq/dt (il
segno meno è qui dovuto al fatto che la carica del condensatore diminuisce
12.8]
FENOMENI TRANSITORI
119
al fluire della corrente) si ottiene la seguente equazione differenziale del secondo
ordine omogenea:
(12.36)
Una soluzione della (12.36) è data da:
(12.37)
dove I1 e I2 sono costanti da determinare mediante le condizioni iniziali, e k1 e k2
devono essere le radici dell'equazione:
(12.38)
cioè:
(12.39)
1/ 2
⎛ R2
1 ⎞
R
Ponendo
= a ed ⎜⎜ 2 −
⎟
2L
⎝ 4 L LC ⎠
= b abbiamo che la soluzione della
(12.37) si scrive in generale:
(12.40)
La quantità b può essere reale, nulla o immaginaria a seconda che sia:
(12.41)
Discutiamo questi tre casi separatamente:
I) b reale
In questa ipotesi le due quantità kl e k2 risultano entrambe reali e negative; gli
esponenziali della (12.40) sono quindi decrescenti e la corrente I(t) per t → ∞
tende a zero. Un circuito di questo tipo viene chiamato sovrasmorzato.
Per determinare le costanti I1 ed I2 imponiamo le condizioni iniziali e cioè:
I(0) = 0 e q(0) = q0. Ponendo t = 0 nella (12.40) si ha che:
I1+ I2 = 0
(12.42)
da cui:
I1 = -I2.
(12.43)
120
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
Dalla (12.35), sempre calcolata per t = 0, si ha invece che:
(12.44)
Sostituendo nella (12.44) la (12.40) e tenendo conto della (12.43), dopo
semplici passaggi, si arriva al risultato:
(12.45)
1
Ponendo
= ω 0 l'espressione della corrente diventa:
LC
(12.46)
Un andamento tipico di questa espressione è mostrato in Fig. 12.11 a).
II) b nullo
La soluzione dell'equazione (12.36) è in tal caso:
(12.47)
dove I1 e I2 sono le costanti di integrazione e a = R/2L.
Seguendo il procedimento utilizzato precedentemente per determinare I1 ed I2
si ottiene:
(12.48)
Un circuito con tale comportamento è detto criticamente smorzato e presenta
un andamento della corrente quale quello di Fig. 12.11b).
III) b immaginario
Questo è il caso più interessante poiché l'andamento della corrente risulta
oscillatorio smorzato come mostrato in Fig. 12.11c). La soluzione dell'equazione
differenziale diviene:
(12.49)
dove I1 e I2 sono le costanti di integrazione, α =
il simbolo j indichiamo la quantità
−1 .
R
e β =
2L
2
1
R
− 2 . Con
LC 4 L
12.8 ]
FENOMENI TRANSITORI
121
FIG. 12. 11 - Andamento in funzione del tempo della corrente in un circuito R-L-C in serie.
a) b reale, circuito sovrasmorzato (R = 300 Ω, L = 0,l H, C= 10 μF);
b) b nullo, circuito criticamente smorzato (R = 200 Ω, L = 0,1 H, C= 10 μF);
c) b immaginario, circuito oscillante smorzato (R = 20 Ω, L = 0,l H, C= 10 μF).
122
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
Se determiniamo le costanti I1 e I2 imponendo le condizioni iniziali del circuito
in esame I(0) = 0 e q (0) = q0, operando nella identica maniera del caso I), troviamo
per la corrente l'espressione:
(12.50)
Per la nota relazione
e
jβt
−e
2j
− jβt
= senβt
la (12.50) si scrive anche:
(12.51)
e ponendo I 0 =
q0ω 02
β
otteniamo in conclusione:
(12.52)
Dalla (12.52) si vede che l'ampiezza delle oscillazioni sinusoidali risulta
smorzata in maniera esponenziale per la presenza del termine e-αt. L'ampiezza delle
oscillazioni della corrente diminuisce in effetti poiché l'energia del circuito,
costituita dall'energia inizialmente immagazzinata nel condensatore, in ogni istante
successivo alla chiusura dell'interruttore, risulta in parte ripartita tra energia
elettrica del condensatore ed energia magnetica dell'induttore, ed in parte dissipata
nella resistenza per effetto Joule. Accade così che al tendere di t all'infinito essa
viene completamente trasformata in calore. Solo nel caso in cui potessimo
considerare un circuito con R nulla si avrebbe che la corrente, essendo α = 0,
sarebbe oscillante con ampiezza costante. Infatti, non dovendo considerare l'effetto
Joule, per aver posto R = 0, e trascurando, secondo quanto detto nel paragrafo 12.1,
ogni emissione di radiazione elettromagnetica, per un circuito in serie L-C saremmo
2
in assenza di ogni fenomeno dissipativo e l'energia iniziale, cioè 1 / 2 q0 / C , si
conserverebbe risultando in ogni istante ripartita tra l'energia del condensatore, WC,
e l'energia dell'induttore, WL.
Varrebbe cioè la relazione:
(
)
(12.53)
Per dimostrare la validità della (12.53) calcoliamo esplicitamente i valori di WC
e di WL. L'energia WC (t) può essere ricavata ricordando che essa è legata alla
differenza di potenziale ΔV esistente tra le armature di un condensatore dalla
formula 1/2 (CΔV2). La differenza di potenziale tra le piastre del condensatore del
circuito in esame è variabile nel tempo e può essere ottenuta dalla (12.34) ponendo
R = 0 e utilizzando come espressione per la corrente la (12.52)
con α = 0 e β =ω0= 1 / LC .
12.9]
CORRENTI ALTERNATE
123
Abbiamo così:
(12.54)
e conseguentemente l'energia del condensatore è:
(12.55)
L'energia magnetica dell'induttore vale
1 2
LI (t ) e se prendiamo per la corrente
2
I la (12.52) con le stesse considerazioni fatte precedentemente, otteniamo:
(12.56)
Sommando la (12.55) e la (12.56) ed esplicitando il valore di I0 che, per un
circuito con R = 0, è uguale a q0 ω0 si trova :
(12.57)
come volevasi dimostrare.
Da notare infine, come deriva dalla (12.57), che ad ogni quarto di periodo
l'energia del circuito L-C risulta essere o tutta elettrica o tutta magnetica.
12.9 Correnti alternate
In una regione dello spazio, ove esista un campo magnetico B uniforme,
inseriamo una spira piana rigida conduttrice di superficie S connessa, mediante un
giunto a contatti rotanti, ad un circuito di resistenza R. Se la spira viene messa in
rotazione con velocità angolare costante co, come si vede in Fig. 12.12, su essa
agisce, secondo la legge di Faraday, una forza elettromotrice indotta uguale a
-dΦ (B)/dt.
FIG.
12.12 - Spira conduttrice ruotante in presenza di campo magnetico uniforme.
124
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
Indicando con ϑ l'angolo formato tra il vettore B e la normale n al piano della
spira, si ha che il flusso di B attraverso la superficie della spira è:
(12.58)
L'angolo ϑ dipende dal tempo secondo la legge ϑ = ωt + α essendo a l'angolo
tra B ed n all'istante iniziale t = 0.
La forza elettromotrice indotta operante sulla spira vale allora:
(12.59)
e di conseguenza la corrente che percorre il circuito di resistenza R risulta essere :
(12.60)
Ponendo I0 = ω BS/R la (12.60) può essere scritta più compattamente nella
forma:
(12.61)
che fornisce la tipica espressione per una corrente variabile sinusoidalmente nel
tempo.
La quantità I0, indicata generalmente con il nome di ampiezza o valore di picco
della corrente, rappresenta il valore massimo che essa può assumere in modulo.
L'argomento della funzione sinusoidale, (ωt + α), è detto fase della corrente, e a
in particolare viene chiamata fase iniziale. Con una opportuna scelta dell'origine
della variabile temporale la fase iniziale a può essere posta uguale a zero. Nel
nostro esempio questo si verificherebbe se facessimo in modo che il piano della
spira fosse perpendicolare al vettore B nell'istante t = 0.
La relazione (12.61) fornisce il valore istantaneo della corrente, variabile nel
tempo con l'andamento riportato in Fig. 12.13. Dalla figura appare evidente come
durante ogni rivoluzione o ciclo della spira la corrente inverta la sua direzione
all'interno di essa.
La velocità angolare co di rotazione della spira che, come appare dalla espressione (12.61), determina la periodicità della funzione sinusoidale e quindi della
corrente, prende il nome di pulsazione e viene misurata in radianti al secondo. La
quantità v = ω/2π, uguale al numero di volte che la corrente assume lo stesso valore
in un secondo, è chiamata frequenza (1) della corrente e viene misurata in cicli al
secondo o hertz (Hz) (1 Hz = l ciclo al secondo).
(1) Spesso nei paragrafi successivi ci capiterà, per comodità o per consuetudine, di
chiamare frequenza la pulsazione.
12.9]
CORRENTI ALTERNATE
FIG. 12.13
125
- Corrente variabile sinusoidalmente nel tempo.
Il periodo di rivoluzione T della spira, corrispondente all'intervallo di tempo
intercorrente tra due valori identici della corrente, per esempio l'intervallo di
tempo tra due massimi, è legato alla frequenza e alla pulsazione dalle relazioni :
(12.62)
Usando la relazione:
(12.63)
si può scrivere:
⎛
⎝
dove α = ⎜ α −
'
π⎞
(12.64)
⎟ . È facile rendersi conto allora che la corrente può essere
2⎠
rappresentata, operando una opportuna scelta della fase iniziale, utilizzando
indifferentemente o la funzione seno o la funzione coseno. Nel seguito di questo
capitolo tuttavia preferiremo esprimere le correnti alternate mediante la funzione
coseno nella seguente maniera:
(12.65)
risultando questa formula essere in molti casi vantaggiosa.
Per introdurre il concetto di corrente alternata abbiamo fatto uso dell'esempio
di una spira ruotante in un campo magnetico uniforme dando in questo modo
un'idea, seppure estremamente semplice e schematica, di come sia possibile
126
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
realizzare un generatore di forza elettromotrice variabile nel tempo
sinusoidalmente. D'ora in avanti ogni qualvolta considereremo un circuito
percorso da corrente alternata di frequenza M supporremo che ad esso sia
applicato un generatore capace di fornire una forza elettromotrice del tipo:
(12.66)
di ampiezza 0 e frequenza ω, responsabile del passaggio della corrente. Il
problema fondamentale della teoria dei circuiti in corrente alternata, di cui ci
occuperemo nei paragrafi successivi, è la determinazione dell'ampiezza e della
fase della corrente che fluisce in un circuito qualsiasi, formato da resistori
condensatori ed induttori, quando ad esso sia applicato un generatore di forza
elettromotrice del tipo (12.66).
12.10 Rappresentazione mediante vettori ruotanti
Nello studio dei circuiti a corrente alternata si dimostra molto utile la
rappresentazione delle grandezze variabili sinusoidalmente nel tempo, dette
fasori, come proiezioni di vettori ruotanti in grafici polari. In Fig. 12.14 viene
mostrato come esempio la rappresentazione della corrente (12.65). Il vettore OP,
di lunghezza proporzionale al valore di picco I0, ruota in verso antiorario (1), con
velocità angolare ω, uguale alla pulsazione della corrente, formando un angolo ϑ
con l'asse di riferimento x. Ponendo ϑ = (ωt + ϕ), otteniamo per la proiezione del
vettore OP sull'asse x l'espressione: .
(12.67)
che fornisce il valore istantaneo della corrente I.
Per dimostrare l'efficacia di questo metodo, eseguiamo il calcolo della somma
di due correnti che fluiscano nel medesimo circuito. Le due correnti possono
FIG.
12.14 - Rappresentazione di un fasore mediante un vettore ruotante.
(1) Il verso di rotazione antiorario è stato preso affinchè l'angolo ϑ risultasse crescente
in questo verso secondo la convenzione dei grafici polari.
12.10]
RAPPRESENTAZIONE MEDIANTE VETTORI RUOTANTI
127
essere ottenute per esempio per mezzo di due spire diverse (per maggiore
generalità vogliamo considerare correnti di ampiezza diversa) ruotanti in una
regione di campo magnetico uniforme intorno allo stesso asse con velocità
angolare ni e giacenti su due piani che all'istante t = 0 formano un angolo ϕ.
Scegliamo inoltre come istante t = 0 quello per cui l'orientamento del piano
della prima spira rispetto alla direzione del campo magnetico è tale da rendere
nullo l'angolo di fase iniziale della prima corrente. Per quanto detto nel paragrafo
precedente, avremo che le due correnti saranno:
I1 =I01 cos ωt
e
I2 = I02 cos (ωt + ϕ).
(12.68)
(12.69)
Le correnti I1 e I2 si dicono sfasate tra loro di un angolo ϕ ed in questo caso
particolare si dice che la corrente I2 precede la corrente I1 o anche che la corrente
I1 è in ritardo sulla corrente I2. In Fig. 12.15 è riportato il grafico delle due
correnti.
12.15 - Andamento temporale di due correnti sinusoidali di uguale pulsazione ω, di
ampiezza diversa e sfasate tra loro di un angolo ϕ.
FIG.
Nel circuito collegato alle due spire rotanti fluisce una corrente I, pari alla
somma della (12.68) e della (12.69), che risulta essere:
(12.70)
La corrente I può essere scritta nella forma:
(12.71)
128
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
se, come si ricava dalla Fig. 12.16 a) applicando la regola del parallelogrammo ai
due vettori rotanti, si prende (1):
(12.72)
e
(12.73)
In Fig. 12.16a) il valore istantaneo (12.71) della corrente I è dato dalla proiezione sull'asse di riferimento x del vettore risultante.
Poiché i vettori ruotano tutti con la medesima velocità angolare co, lo sfasamento esistente tra essi rimane invariato nel tempo ed uguale a quello che avevano all'istante iniziale. La differenza di fase può essere determinata facilmente
per mezzo di un diagramma, come quello mostrato in Fig. 12.16 b), detto
diagramma
FIG.
12.16 - Somma di due correnti sinusoidali di uguale frequenza: a) diagramma dei fasori,
b) diagramma stazionario.
stazionario in cui i vettori sono fissi e gli sfasamenti tra i fasori sono calcolati
rispetto ad uno preso come riferimento, nel nostro caso per esempio I1
(1) Il procedimento seguito è del tutto equivalente, come è facile verificare, a trasformare
analiticamente la (12.70) con note formule di trigonometria, come si suol fare ad esempio
nello studio della composizione dei moti armonici.
12.11]
RAPPRESENTAZIONE MEDIANTE NUMERI COMPLESSI
129
Il metodo appena illustrato può essere evidentemente applicato a più di due
correnti e vale inoltre anche per le differenze di potenziale esistenti ai capi dei
componenti di un circuito in corrente alternata, rappresentabili esse pure mediante
vettori ruotanti.
12.11 Rappresentazione mediante numeri complessi
Consideriamo il numero complesso:
z = a + jb
(12.74)
dove a e b sono rispettivamente la componente reale e quella immaginaria del
numero complesso e j = − 1 rappresenta l'unità immaginaria. Mediante l'uso dei
grafici di Argand o di Gauss è possibile fornire una rappresentazione geometrica del
numero complesso. Prendiamo infatti in esame il piano complesso di Fig. 12.17 nel
quale l'asse x costituisce l'insieme dei numeri reali e l'asse y quello dei numeri
immaginari puri. In questo piano il numero (12.74) può essere riguardato come un
vettore OP, applicato alla origine degli assi con componente lungo l'asse (reale) x
uguale ad a e con componente lungo l'asse (immaginario) y uguale a b.
FIG. 12.17
- Rappresentazione geometrica di un numero complesso.
Se indichiamo con ϑ = arctg b/a l'angolo che il vettore OP forma con l'asse x e
con r= (a2 + b2)1/2 la sua ampiezza, si ricava facilmente che:
(12.75)
e
(12.76)
Per queste due relazioni e per la formula di Eulero:
(12.77)
130
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
il numero complesso (12.74) si può anche scrivere nella forma:
(12.78)
dove r è detto modulo e ϑ argomento del numero complesso.
Abbiamo visto che correnti o tensioni variabili sinusoidalmente nel tempo sono
rappresentabili come proiezioni lungo l'asse x di vettori ruotanti con velocità angolare
uguale alla frequenza ω. Appare evidente a questo punto la correlazione esistente tra
il metodo dei vettori ruotanti e la rappresentazione geometrica dei numeri complessi
nei grafici di Argand. Infatti i vettori ruotanti relativi a grandezze sinusoidali variabili
con frequenza w possono essere scritti come numeri complessi nella forma (12.74) o
in quella (12.78), forme che abbiamo dimostrato essere equivalenti, con un
argomento ϑ = (ωt + ϕ) ed un modulo r uguale al valore di picco della grandezza.
Una corrente alternata di frequenza ω, ampiezza I0, fase iniziale ϕ, si scrive così in
maniera complessa:
(12.79)
ed il suo valore istantaneo, che coincide con la proiezione del vettore lungo l'asse x, o
asse reale, è quindi uguale alla parte reale (1) I0 cos (ωt + ϕ) del numero complesso.
In conclusione possiamo riassumere dicendo che un problema concernente
correnti o tensioni alternate può essere trattato nel campo complesso scrivendo queste
quantità nella forma (12.78). Il risultato finale del calcolo è generalmente un numero
complesso e la quantità alla quale siamo interessati, quella che ha significato fisico, è
la parte reale del numero complesso. Il suo valore di picco si ottiene prendendo il
modulo del numero complesso mentre la fase è data dall'arcotangente del rapporto tra
il coefficiente della parte immaginaria e la parte reale.
Per dimostrare come il metodo dei numeri complessi riunisce in sé la comodità
della rappresentazione mediante vettori e la semplicità del calcolo algebrico,
riconsideriamo il problema del calcolo della corrente somma delle due correnti
(12.68) e (12.69), che adesso scriviamo in notazione complessa:
(12.80)
ed
(12.81)
Se per la corrente risultante prendiamo la espressione I = I 0 e
j (ωt + ϕ ' )
vale la
relazione:
(12.82)
(1) Può essere usata indifferentemente anche la parte immaginaria ma ovviamente una volta
deciso quali delle due componenti considerare è necessario attenersi nell'ambito di un dato
problema sempre alla stessa scelta.
12.12]
L' IMPENDENZA
131
Tenendo conto che il termine ejωt nella (12.82) si semplifica e sfruttando la
proprietà per cui in una eguaglianza tra numeri complessi le parti reali e quelle
immaginarie devono essere separatamente fra loro eguali, ricaviamo che:
(12.83)
e che:
(12.84)
Quadrando e sommando le due espressioni otteniamo il valore di picco della
corrente /:
(12.85)
e dividendo la seconda espressione per la prima abbiamo lo sfasamento ϕ' tra la
corrente I e la corrente I1 presa come riferimento:
(12.86)
La (12.85) e (12.86) coincidono con le pressioni (12.72) e (12.73) precedentemente
calcolate dalla determinazione geometrica del risultante di due vettori rotanti.
12.12
L'impedenza
La differenza di potenziale (1) ai capi di un resistore di resistenza R percorso da
una corrente alternata I = I0cosoωt è:
(12.87)
Tra le estremità di un induttore di induttanza L in cui circoli la stessa corrente I
abbiamo invece:
(12.88)
Infine tra le armature di un condensatore di capacità C in cui fluisce la corrente
I0 cos ωt la differenza di potenziale all'istante t è:
(12.89)
(1) Per comodità in questo paragrafo indichiamo la differenza di potenziale con V in luogo
di ΔV.
132
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
Esaminando queste tre espressioni si nota come la corrente e la tensione, che nel
caso del resistore sono in fase, nel caso dell'induttore e del condensatore risultano
sfasate di un angolo uguale a π/2, e in particolare si osserva che per l'induttore è la
tensione a precedere la corrente mentre per il condensatore è la corrente a precedere
la tensione.
È bene chiarire subito a questo riguardo che quando affermiamo che una corrente
precede o segue una tensione non vogliamo con questo far riferimento ad una
relazione del tipo causa-effetto. Va ricordato infatti che le espressioni sinusoidali da
noi considerate per le correnti e per le tensioni alternate sono caratteristiche del
comportamento stazionario del circuito e valgono quindi quando l'andamento
transitorio iniziale può essere considerato sufficientemente smorzato. Così la corrente
alternata prodotta dalla spira ruotante di paragrafo 12.9 sarà uguale alla (12.61) o alla
(12.65) solamente dopo un numero sufficientemente grande di rivoluzioni. I rapporti
di fase a cui prima accennavamo tra corrente e tensione sono perciò tipici del
comportamento assunto da queste grandezze dopo un intervallo di tempo, preso a
partire dall'istante in cui la corrente ha cominciato a circolare, grande rispetto alla
costante di tempo del circuito.
Immaginiamo ora che la corrente I0 cos ωt fluisca attraverso un resistore di
resistenza R ed un induttore di induttanza L posti in serie. Tra gli estremi del sistema
esiste una differenza di potenziale:
(12.90)
somma delle differenze di potenziale di ogni singolo elemento.
Similmente se un sistema, costituito da un resistore di resistenza R e da un
condensatore di capacità C posti in serie, è percorso dalla corrente I0 cos ωt la
differenza di potenziale agli estremi risulta essere:
(12.91)
Abbiamo ricavato la (12.90) e la (12.91) per mostrare come non sia immediato
trovare una relazione semplice tra tensioni e correnti alternate, del tipo della legge di
Ohm per i circuiti in corrente continua, per la presenza nelle espressioni di due
termini, uno in fase ed uno sfasato di π/2. Questa difficoltà tuttavia può essere
superata facendo uso della notazione complessa. Se scriviamo infatti la corrente che
fluisce in un elemento, o sistema di elementi di un circuito, nella forma I=I0 ejωt e la
differenza. di potenziale esistente ai suoi estremi nella forma V = V0 ej(ωt + ϕ), essendo
ϕ la differenza di fase tra tensione e corrente, abbiamo che vale la semplice
relazione:
(12.92)
12.12]
L' IMPENDENZA
133
La quantità complessa Z prende il nome di impedenza dell'elemento o della
combinazione.
Se scrivessimo le relazioni (12.87), (12.88) e (12.89) in forma complessa,
troveremmo che l'impedenza di un resistore si riduce a una quantità sempre reale ed
uguale al valore della sua resistenza R, e che l'impedenza di un induttore o di un
condensatore si riduce al contrario a una quantità sempre immaginaria
ed uguale rispettivamente a jwL od a − j
1
ωC
La relazione in forma complessa corrispondente alla (12.90) si scrive:
(12.93)
e applicando la (12.92) si ha che l'impedenza per un sistema in serie R-L è:
(12.94)
Con il medesimo procedimento si ricava per il sistema in serie R-C un valore :
(12.95)
Notiamo che sia nella (12.94) sia nella (12.95) la parte reale della impedenza è
uguale al valore R della resistenza mentre la parte immaginaria per la serie R-L è
uguale ad jωL e per la serie R-C è uguale ad – j (l/ωC).
In generale l'impedenza di un elemento o di un sistema di elementi, si scrive nella
forma:
Z = (R + jX )
con una parte reale R che rappresenta la resistenza ed una parte immaginaria il cui
coefficiente (reale) X dicesi reattanza. Dato che per un induttore ed un condensatore,
come abbiamo visto, l'impedenza, essendo puramente immaginaria, coincide (a parte
il fattore j) con la reattanza e poiché la reattanza di un induttore è positiva e quella di
un condensatore è negativa, si è soliti chiamare reattanza induttiva una X positiva e
reattanza capacitiva una X negativa. Dagli esempi sopra riportati deduciamo inoltre
che le impedenze si compongono analogamente alle resistenze nei circuiti in corrente
continua. Quindi N impedenze in serie si sommano:
Z = Z1 + Z 2 + ...... + Z N
(12.96)
ed N impedenze in parallelo si compongono secondo la regola:
(12.97)
134
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
L'inverso della impedenza Z è chiamata ammettenza e normalmente viene
indicata con il simbolo Y.
Per meglio capire quanto finora esposto ricapitoliamo i punti essenziali della
trattazione complessa. Dato un elemento, od un sistema di elementi con due estremi,
di impedenza Z, percorso da una corrente I0 ejωt, la differenza di potenziale V0 ej(ωt + ϕ)
esistente ai suoi estremi è:
(12.98)
con un valore istantaneo, uguale alla parte reale della (12.98), dato da:
(12.99)
Sostituendo le espressioni di V ed I e semplificando, la (12.98) diviene:
(12.100)
e da questa, per una proprietà dei numeri complessi ('), si ricava che:
(12.101)
e che:
(12.102)
In un grafico complesso, in cui la fase della corrente venga presa come
riferimento, il vettore corrente risulta parallelo all'asse reale x. Il vettore che
rappresenta la tensione ha un modulo proporzionale alla (12.101) e forma con l'asse
x un angolo ϕ dato dalla (12.102). Il vettore della tensione può essere inoltre pensato
come il risultante della somma di un vettore parallelo all'asse x, dipendente dalla
resistenza R, e di un vettore, dipendente dalla reattanza X, parallelo all'asse y e
precisamente ruotando rispetto all'asse x di più o meno π/2 a seconda che la reattanza
sia induttiva o capacitiva.
Per quando riguardo poi le leggi di Kirchhoff, esse continuano naturalmente a
valere anche nel campo complesso purché scritte in termini di quantità complesse.
1) la somma delle correnti complesse entranti in un nodo è uguale alla somma delle
correnti complesse uscenti dallo stesso nodo;
2) la somma algebrica delle forze elettromotrici complesse contenute in una maglia
è uguale alla somma delle cadute di potenziale complesse esistenti lungo la
maglia.
(1) Ricordiamo che se due numeri complessi, z1 = x1 +jy1 e z2 = x2 +jy2, sono uguali, z1 = z2,
(
saranno uguali anche i loro moduli, x12 + y12
= arctg y2/x2
)
1/ 2
(
= x 22 + y 22
)
1/ 2
, ed i loro argomenti arctg y1/x1
12.13]
CIRCUITO R-L-C IN SERIE
135
12.13 Circuito R-L-C in serie
Esaminiamo il comportamento del circuito in serie di Fig. 12.18 formato da una
resistenza R, una induttanza L e una capacità C, al quale è applicato un generatore di
forza elettromotrice alternata di caratteristiche note:
(12.103)
Dopo la chiusura dell'interruttore S, che supponiamo avvenire all'istante t = 0, il
circuito è percorso da una corrente I che, per la seconda legge di Kirchhoff, deve
soddisfare la relazione:
(12.104)
Derivando rispetto al tempo e facendo uso della relazione I = dq/dt, la (12.104)
diviene:
(12.105)
È immediato notare che se la forza elettromotrice
fosse costante nei tempo la
(12.105) coinciderebbe con l'equazione (12.36), già analizzata nel paragrafo 12.8 con
differenti condizioni iniziali.
FIG.
12.18 - Circuito R-L-C in serie con generatore di forza elettromotrice alternata.
Nel caso invece in cui
è variabile nel tempo la (12.105) è una equazione
differenziale del secondo ordine non omogenea. Per un teorema di analisi la sua
soluzione è data dalla somma della soluzione generale dell'equazione omogenea
associata più un integrale particolare dell'equazione disomogenea. Da un punto di
vista fisico la soluzione dell'equazione omogenea associata corrisponde al
comportamento transitorio iniziale della corrente nel circuito mentre l'integrale
particolare fornisce il comportamento stazionario valido per tempi sufficientemente
lunghi.
136
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
Questo significa in altre parole che una volta smorzatosi il contributo iniziale, che
è sempre decrescente nel tempo, la corrente assume un andamento oscillante
stazionario con frequenza uguale a quella del generatore di forza elettromotrice
applicato al circuito. Tali oscillazioni prendono il nome di oscillazioni forzate.
Come abbiamo visto nel paragrafo 12.8 la soluzione dell'equazione omogenea
associata della (12.105) è:
(12.106)
con kl e k2 che dipendono dai valori degli elementi componenti il circuito ed I1 ed I2
che costituiscono le costanti di integrazione. Per determinare l'integrale particolare
della (12.105) facciamo uso della trattazione complessa scrivendo
cercando una soluzione del tipo:
=
0 ej(ωt+ϕv) e
(12.107)
Per determinare i valori di I0 e ϕ1, sostituiamo la (12.107) nella (12.105) ed
eseguiamo le derivate; abbiamo allora l'espressione:
(12.108)
che con semplici operazioni algebriche si riduce a:
(12.109)
Ponendo poi:
(12.110)
e:
(12.111)
la (12.109) si trasforma nella:
(12.112)
La (12.110) rappresenta l'impedenza del circuito che, essendo formato da un
sistema di elementi in serie, è uguale alla somma delle impedenze dei tre elementi.
Seguendo il procedimento illustrato nel paragrafo precedente è facile ottenere il
valore dell'ampiezza della corrente:
(12.113)
12.13]
CIRCUITO R-L-C IN SERIE
137
dove con | Z | indichiamo il modulo dell'impedenza, e il valore della differenza di
fase tra tensione e corrente:
(12.114)
Le due ultime relazioni determinano completamente le caratteristiche della
corrente stazionaria del circuito, e quindi l'integrale particolare della (12.105). Si
potrà allora calcolare la soluzione generale. Prima di procedere a questo calcolo
esplicito, è però interessante vedere come sia possibile arrivare agli stessi risultati
applicando il metodo dei vettori ruotanti nel piano complesso. I tre termini a destra
dell'equazione (12.104), sono delle tensioni alternate e possono essere rappresentati
quindi come proiezioni sull'asse reale x di un piano complesso di tre vettori
ruotanti, vedi Fig. 12.19, ciascuno con le seguenti caratteristiche :
I) un vettore di modulo RI0 e fase iniziale ϕI, quindi parallelo al vettore corrente.
II) un vettore di modulo ωLI0 e fase iniziale (ϕI + π/2), ruotato perciò di 90° in senso
antiorario rispetto al primo vettore.
III) un vettore di modulo I0/ωC e di fase iniziale (ϕI - π/2), ruotato perciò di 90° in
senso orario rispetto al primo vettore.
Il valore istantaneo della forza elettromotrice, a sinistra della (12.104), è dato
allora dalla proiezione sull'asse x del vettore di modulo 0 risultante dei tre vettori
di Fig. 12.19a).
Ciò è mostrato in Fig. 12.19b), dove abbiamo prima eseguito la somma dei due
vettori antiparalleli di modulo ωLI0 e I0/ωC e poi la somma del risultante
FIG.
12.19 - Applicazione del metodo dei vettori ruotanti.
a) Le differenze di potenziale ai capi degli elementi del circuito di Fig. 12.18 come proiezioni
di vettori ruotanti.
b) valore istantaneo della forza elettromotrice come proiezione del vettore risultante dei tre
vettori della figura precedente.
138
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
di questi due con il terzo, di modulo RI0. Dalla stessa figura si trova facilmente:
(12.115)
e
(12.116)
relazioni che, come volevamo dimostrare, coincidono con la (12.113) e la (12.114).
Nel caso in cui la frequenza ω della forza elettromotrice applicata sia uguale alla
frequenza propria del circuito :
(12.117)
l'impedenza Z del circuito, come risulta dalla (12.110), diventa una quantità reale
coincidente con il valore R della resistenza. In questa condizione di funzionamento,
detta di risonanza, l'ampiezza I0 della corrente stazionaria ha un valore massimo pari
ad 0/R e la differenza di fase ϕ tra tensione e corrente diventa nulla. L'effetto di
risonanza non è tipico solo dei circuiti in corrente alternata, ma si riscontra in molti
differenti fenomeni fisici. In generale possiamo dire che esso si verifica
ogniqualvolta si applica ad un determinato sistema una forza variabile, che a seconda
dei casi può essere meccanica, elettrica, magnetica, caratterizzata da una frequenza il
cui valore coincide con una delle frequenze proprie del sistema.
Particolarmente interessante per determinare le proprietà di un circuito risonante è
il cosiddetto fattore di qualità, Q0 definito come :
(12.118)
Questa quantità, che può essere introdotta in maniera molto più generale (1),
risulta direttamente collegata con la larghezza del massimo di risonanza della
corrente, vale a dire della curva I0(ω). Infatti, tenendo conto della (12.118),
l'ampiezza della corrente I, si scrive:
(12.119)
(1) Per un sistema oscillante si definisce fattore di qualità il rapporto adimensionale tra
l'energia immagazzinata nel sistema e l'energia media dissipata. In maniera analoga il Q0 può
essere definito anche come il rapporto ω0/γ tra la frequenza propria del sistema ω0 e la
quantità γ che rappresenta l'inverso del tempo richiesto perché l'energia del sistema decresca
di l/e rispetto al suo valore iniziale.
12.13]
CIRCUITO R-L-C IN SERIE
139
ed il rapporto tra la resistenza R ed il modulo della impedenza | Z |, vale:
(12.120)
Entrambe queste espressioni per co = co0 presentano un massimo e, come può
riscontrarsi in Fig. 12.20 e 12.21, all'aumentare del parametro Q0 tale massimo
diviene sempre più stretto ed in particolare per l'intensità di corrente sempre più
elevato. Per definire quantitativamente un tale comportamento determiniamo quei
valori di u>, indicati con o^ ed o>2, per i quali il valore di
R/\ Z | diviene l/j/2 del suo valore massimo (1). Tale condizione si verifica quando
12.20 - Comportamento risonante dell'ampiezza della corrente in funzione di ω/ω0 per un
circuito in serie R-L-C.
FIG.
(1) Questi valori della frequenza prendono il nome di punti di potenza dimezzata.
140
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
12.21 - Rapporto R/Z in funzione di ω/ ω0 per un circuito in serie R-L-C. (Scala
logaritmica per ascisse ed ordinate).
FIG.
(12.121)
relazione che è soddisfatta da quattro differenti valori di ω, due negativi e due
positivi. I due valori positivi, ai quali evidentemente siamo interessati, sono:
(12.122)
La differenza tra questi due valori della frequenza, detta anche ampiezza
12.13]
CIRCUITO R-L-C IN SERIE
141
di banda, risulta essere:
(12.123)
Come volevamo dimostrare troviamo così che la larghezza del massimo di
risonanza (1) è inversamente proporzionale al Q0 del circuito.
In Fig. 12.22 è riportato l'andamento della differenza di fase tra tensione e
corrente in funzione di ω/ω0.
È interessante notare che per ω < ω0 la differenza di fase è negativa ; quindi la
corrente precede la tensione e la reattanza X del circuito risulta capacitiva ; per
ω >ω0 la differenza di fase è positiva, ed è allora la tensione a precedere la
corrente e la reattanza X del circuito è induttiva.
12.22 - Andamento della differenza di fase tra tensione e corrente in funzione di ω/ω0
per un circuito R-L-C in serie.
FIG.
(1) In molti casi la resistenza di un circuito risuonante è quella dell'avvolgimento con il
quale è costruito l'induttore e pertanto Q0 diventa una proprietà di quest'ultimo. Per bobine
di alta qualità utilizzate in circuiti a radio-frequenza il fattore di qualità è dell'ordine di 100.
142
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
Tornando infine al problema di determinare la soluzione generale dell'equazione
(12.105), siamo ora in grado di scrivere che essa, in forma complessa, risulta
essere:
(12.124)
con I0 e ϕI, dati dalla (12.113) e dalla (12.114), I1 ed I2 costanti da determinarsi
imponendo le condizioni iniziali che per il nostro caso sono I (0) = 0 e q (0) = 0 e
con k1 e k2 che, se ci limitiamo al caso di circuito oscillante smorzato, per quanto
visto nel paragrafo 12.8, sono uguali a:
(12.125)
dove:
Imponendo la prima condizione iniziale, I(0) = 0, alla espressione (12.124)
calcolata per t = 0 si trova che :
(12.126)
Imponendo la seconda condizione iniziale, q (0) = 0, alla espressione (12.104)
calcolata per t = 0 e utilizzando per I la (12.124) si ha inoltre:
(12.127)
Risolvendo il sistema formato dalla (12.126) e dalla (12.127) otteniamo le due
costanti I1 ed I2 che sostituite nella (12.124) danno:
(12.128)
Il valore istantaneo della corrente I(t) è allora uguale alla parte reale della
(12.128). Ricordando inoltre che:
(12.129)
possiamo scrivere in conclusione che:
12.14]
POTENZA DISSIPATA NEI CIRCUITI A CORRENTE ALTERNATA
143
Per t tendente all'infinito il valore della corrente si riduce al primo termine a
destra che, come abbiamo già detto, rappresenta il comportamento stazionario. In
pratica è sufficiente attendere un tempo dell'ordine di qualche 1/α perché il secondo
termine a destra divenga trascurabile e la corrente assuma il suo valore stazionario.
In Fig. 12.23 è rappresentato un tipico andamento per la corrente (12.130).
FIG.
12.23 - Andamento della corrente in funzione del tempo in un circuito del tipo di Fig.
12.18 con comportamento oscillatorio smorzato (R = 20Ω, L = 0,1 H, C = 10μF , ω0 =
103Hz).
12.14 Potenza dissipata nei circuiti a corrente alternata
In questo paragrafo cercheremo di determinare una relazione che fornisca la
potenza dissipata in un elemento di circuito percorso da corrente alternata, simile a
quella da noi a suo tempo ricavata per il caso di un puro resistore di resistenza R
attraversato da una corrente continua I, e cioè P = RI2.
Abbiamo visto che se ad un elemento di impedenza Z applichiamo un generatore di
forza elettromotrice
= 0 cos(ωt + ϕv) in esso fluisce una corrente I = I0 cos (ωt
+ ϕI) con ampiezza e fase determinabili secondo le regole generali introdotte nei
paragrafi precedenti. Ponendo per comodità ϕI = 0 e ϕv = ϕ, la potenza fornita dal
generatore è data allora da:
(12.31)
144
CIRCUITI IN CORRENTE CONTINUA E ALTERNATA
[CAP. 12
Questa quantità è variabile nel tempo per cui, se vogliamo ottenere una informazione di maggiore interesse pratico, è preferibile ricavare la potenza media
fornita dal generatore integrando la (12.131) su un ciclo completo e dividendo poi
il risultato per un intervallo di tempo pari ad un periodo T. Abbiamo così :
(12.132)
Il primo integrale a destra della (12.132) può essere calcolato utilizzando una
delle relazioni (12.129):
(12.133)
mentre si vede facilmente che il secondo integrale è nullo.
La (12.132) fornisce quindi il risultato:
(12.134)
Se calcoliamo il valore quadratico medio della corrente I2, troviamo che esso
vale:
(12.135)
È consuetudine definire valore efficace della corrente alternata la radice
quadrata del suo valore quadratico medio, e cioè:
(12.136)
Per la forza elettromotrice si ricava naturalmente la relazione analoga:
(12.137)
Sostituendo la (12.136) e la (12.137) nella (12.134) si ha che:
(12.138)
La quantità cos ϕ, che appare in questa ultima espressione, viene chiamata
fattore di potenza e poiché :
(12.139)
12.14]
POTENZA DISSIPATA NEI CIRCUITI A CORRENTE ALTERNATA
145
essa ha valore uno per un elemento puramente resistivo, cioè con reattanza nulla, ed
è zero per un elemento puramente reattivo come un condensatore od un induttore.
[
]
1/ 2
Dato poi che 0= R 2 + X 2 I 0 la (12.134) può essere scritta, facendo
uso anche della (12.139), come:
(12.140)
ottenendo in modo tale una espressione analoga a quella valida nel caso di resistori
percorsi da corrente continua, con la sola differenza che per le correnti alternate
nell'espressione della potenza media bisogna considerare il valore efficace della
corrente. Come era da aspettarsi troviamo inoltre che solo la parte resistiva
dell'elemento dissipa energia, trasformandola in calore, mentre la potenza media
dissipata nella parte reattiva è nulla.
13
Teoria del campo elettromagnetico
13.1 Equazioni differenziali di Maxwell
Abbiamo visto come nello studio dei fenomeni elettrici e magnetici si potessero
considerare alcune leggi fondamentali da cui ricavare il complesso dei risultati
sperimentali. Ricorderemo il teorema di Gauss dell'elettrostatica che per una
distribuzione continua di cariche elettriche con densità p può scriversi nella
seguente forma differenziale:
div D = ρ
(D = εE);
(13.1)
il teorema di Gauss per la magnetostatica :
(B = μH);
div B = 0
(13.2)
il teorema di Ampère, che per una distribuzione continua di correnti costanti di
densità J può scriversi:
rot H=J
(13.3)
la legge dell'induzione elettromagnetica:
rot E = −
∂B
∂t
(13.4)
148
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
Esse si possono riunire nel seguente sistema di equazioni differenziali:
(13.5)
con:
A queste possiamo aggiungere l'equazione di continuità:
(13.6)
che esprime la conservazione della carica elettrica.
Osserviamo che applicando l'operatore divergenza alla (13.3) si ha:
per cui, essendo per un vettore u qualsiasi div rot u = 0, si ha:
(13.7)
che è in contrasto con l'equazione di continuità (13.6). Da questa discende infatti
che la (13.7) non è in generale valida, ma che essa lo è solo per i fenomeni
∂B
= 0 o, come si suol dire, in regime
stazionari per i quali vale la condizione
∂t
permanente.
L'equazione rot H = J non è quindi valida in generale, ma solo per i regimi
stazionari o permanenti. Ciò può essere verificato in modo intuitivo nella maniera
seguente.
Si consideri il circuito di Fig. 13.1 che consiste in un piccolo condensatore a
facce piane caricato da una corrente I(t). Tracciato un contorno C che contenga
13.1 - Verifica della legge di circuitazione di Ampere. Le superfici S1 ed S2 si
appoggiano al contorno C.
FIG.
13.1]
EQUAZIONI DIFFERENZIALI DI MAXWELL
149
il conduttore che adduce la corrente, consideriamo due superficie S1 e S2 che si
appoggiano a tale contorno; di queste S1 sia esterna alla regione compresa fra le
armature del condensatore, mentre S2 tagli proprio tale regione. Applicando allora
il teorema di Ampère (che non è altro che l'espressione finita della legge
differenziale rot H = J) al contorno C e alla superficie S1 avremo:
(13.8)
Applicando lo stesso teorema al contorno C e alla superficie S2 avremo invece :
(13.9)
Evidentemente la (13.8) e la (13.9) sono fra loro in contraddizione. La ragione
fisica di ciò va cercata nel fatto che, come ha chiarito Faraday, nel dielettrico (che
può essere anche il vuoto) contenuto fra le armature del condensatore si generano
delle correnti, dette di spostamento, che chiudono per cosi dire il circuito e delle
quali chiaramente non si è tenuto conto scrivendo la (13.9). L'equazione rot H = J
va pertanto scritta nel modo seguente: rot H = J + Js essendo Js la densità della
corrente di spostamento.
Per determinare l'espressione di Js possiamo procedere in un modo formale, ma
assai semplice, che consiste sostanzialmente nel generalizzare opportunamente la
legge di Ampère in modo da renderla valida anche per i fenomeni variabili e
compatibile con l'equazione di continuità (13.6).
Dovrà essere infatti:
rot H = J
rot H = J + Js ≡ u
per regimi stazionari
per regimi non stazionari.
Il vettore da determinarsi u è pertanto tale che, nel caso di regimi stazionari, si
dovrà ridurre a J e in ogni caso (per il fatto che esso è uguale a rot H ) dovrà
soddisfare alla: div u = 0. Osserviamo che in conseguenza della (13.6) si ha:
da cui, tenendo conto della (13.1), si ricava:
(13.10)
cioè :
(13.11)
150
Prendendo
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
tutte le condizioni richieste risul
teranno evidentemente soddisfatte. Con ciò l'equazione differenziale di Ampère
verrà ad essere costituita dalla:
(13.12)
valida in generale.
Le equazioni differenziali (13.5) verranno così ad essere sostituite dalle seguenti:
(13.13)
che riassumono pertanto tutte le leggi fondamentali della elettrologia e del
magnetismo, e che valgono per campi comunque variabili col tempo. Esse
costituiscono il sistema delle equazioni di Maxwell. Si osservi che, dato il
procedimento adottato per generalizzare l'equazione rot H = J, l'equazione di
continuità (13.6) risulta pure contenuta nel sistema di equazioni di Maxwell. Ad
ogni modo per verificare direttamente questa affermazione applichiamo l'operatore
divergenza alla seconda delle (13.13). Si ha:
(13.14)
trasformando il secondo membro per mezzo della prima delle (13.13) e ricordando
che per un vettore u qualsiasi si ha div rot u = 0, si ottiene immediatamente
l'equazione di continuità (13.6).
Quest'ultima osservazione mette anche in rilievo il fatto che le equazioni che
costituiscono il sistema (13.13) non sono fra loro indipendenti. D'altra parte,
tenendo conto delle relazioni strutturali D = εE, B = μH, esse risultano in numero
di otto equazioni scalari in solo sei funzioni incognite (le tre componenti di E e le
tre componenti di H). Precisamente, tenendo conto del procedimento ora seguito
per ricavare l'equazione di continuità, possiamo considerare come effettivamente
indipendenti le equazioni
(13.15)
13.1]
EQUAZIONI DIFFERENZIALI DI MAXWELL
151
(vale a dire quelle che contengono le sorgenti del campo ρ, J) a cui vanno aggiunte
le relazioni strutturali D = εE, B = μH. Abbiamo così due equazioni vettoriali che
definiscono i due vettori E e H. Queste due equazioni, con le corrispondenti
condizioni iniziali e al contorno, determinano E e H completamente. In altri
termini, il sistema di equazioni di Maxwell è un sistema completo. È anche facile
rendersi conto dell'unicità della soluzione di tali equazioni. Infatti se, per ipotesi, si
assumesse l'esistenza di due soluzioni distinte avremmo, come conseguenza della
linearità delle equazioni di Maxwell, che anche la differenza di dette soluzioni
sarebbe pure una soluzione delle equazioni corrispondenti a sorgenti nulle (J = 0,
ρ = 0) e a valori iniziali e al contorno pure nulli. Ma tale soluzione risulta
identicamente nulla. Notiamo infine che l'equazione
tenendo conto che :
può essere scritta nella forma:
dove ovviamente il termine
∂P
è diverso da zero solo in presenza di mezzi
∂t
materiali.
Il termine che abbiamo chiamato densità di corrente di spostamento, risulta scisso in
∂E
due parti: la prima soltanto, cioè ε 0
, deve effettivamente essere considerata una
∂t
densità di corrente di spostamento, dovuta cioè a variazione nel tempo del campo
∂P
elettrico; la seconda,
rappresenta una densità di corrente dovuta alle cariche
∂t
∂P
legate. Ricordando la relazione σp = P ⋅ n appare che
ha le dimensioni di una
∂t
densità di corrente.
Consideriamo un dielettrico in cui vi siano N dipoli per unità di volume, ognuno
con momento di dipolo p, che nell'intervallo di tempo dt subisca una variazione dp.
Tale variazione può essere attribuita ad uno spostamento di un tratto dl subito da
una carica q. È allora dp = q dl.
La densità di carica che si sposta è ρ = Nq ed essa produce una densità di
corrente data da:
essendo P = Np la densità di polarizzazione macroscopica.
152
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
13.2 Conservazione dell'energia e vettore di Poynting
Consideriamo una regione dello spazio di volume V racchiusa da una superficie
S entro la quale esista un campo elettromagnetico e delle correnti elettriche che, per
effetto Joule, dissipino una potenza PJ. La forza per unità di volume (o densità di
forza) che agisce sulle cariche è:
(13.16)
Dove si è supposto che la corrente sia dovuta al moto di particelle di carica q
con velocità v in numero di N per unità di volume. Il lavoro che la densità di forza f
compie nell'unità di tempo sulle cariche, cioè la densità di potenza, è :
(13.17)
avendo utilizzata la definizione J = Nqv. Il risultato, come era prevedibile, non
dipende dal campo magnetico dato che la forza magnetica è perpendicolare allo
spostamento della carica e quindi non compie lavoro. La potenza dissipata per
effetto Joule nel volume V è allora:
(13.18)
Sostituendo a J l'espressione che si ricava dalla seconda delle equazioni di
Maxwell (13.13) abbiamo:
(13.19)
Trasformiamo questa espressione valendoci della formula (vedi tabella 1.1) di
calcolo vettoriale:
(13.20)
e utilizzando per rot E la espressione che risulta dalla quarta delle equazioni
(13.13), troviamo che:
(13.21)
Osservando poi che:
13.3]
QUANTITÀ DI MOTO ELETTROMAGNETICA
153
si ottiene:
(13.22)
ove si è indicato con W l'energia del campo elettromagnetico contenuta nel volume
V e cioè:
(13.23)
Trasformando il primo integrale al secondo membro della (13.21) mediante il
teorema di Gauss e introducendo il vettore:
(13.24)
si ha:
(13.25)
L'equazione (13.21) si scrive pertanto:
(13.26)
La (13.26) esprime la legge di conservazione dell'energia per il campo
elettromagnetico. Essa mette in evidenza il fatto che l'energia del campo in una
regione dello spazio varia a causa di due fattori: la dissipazione per effetto Joule
entro il volume V ed il flusso di energia che entra o esce da tale regione
attraversando la superficie S che la racchiude.
Si osservi che il secondo termine del secondo membro della (13.26) tiene conto
del flusso dell'energia elettromagnetica attraverso la superfìcie S delimitante il
volume V. È perciò chiaro che S = (E × H) è un vettore associato al propagarsi
dell'energia elettromagnetica nello spazio. Esso è denominato vettore di Poynting.
13.3 Quantità di moto elettromagnetica
Consideriamo un campo elettromagnetico E, B, che agisce in un volume V su
una distribuzione continua di cariche con densità variabile ρ. Possiamo dire che
sulla carica dq =ρ dυ si esercita la forza elettromagnetica :
(13.27)
154
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
essendo:
(13.28)
la densità della forza. La forza risultante su tutto il volume V è allora:
(13.29)
Notiamo che per il caso che stiamo trattando la corrente è determinata
completamente dal moto delle cariche per cui:
(13.30)
Usando quindi le equazioni di Maxwell:
(13.31)
possiamo eliminare ρ e v dalla (13.28) ottenendo:
(13.32)
tenendo poi presente che:
(13.33)
la (13.32) si trasforma nella seguente espressione:
(13.34)
Integrando sul volume V otteniamo:
(13.35)
dove con Σ abbiamo indicato simbolicamente il complesso dei quattro termini
rimanenti. Ma, come si può verificare dopo opportune manipolazioni (1), l'ultimo
(1) Vedi per esempio J. D. Jackson: Classica! Electrodynamics pag. 190-194.
13.4]
POTENZIALI DEL CAMPO ELETTROMAGNETICO
155
mo integrale può essere trasformato in un integrale di superficie di un'espressione
contenente solo i quadrati delle diverse componenti di E e di H. Di conseguenza
in un sistema isolato, sul quale agiscono solo forze elettromagnetiche, prendendo
un volume V sufficientemente grande (al limite infinito) in modo che E ed H si
annullino sulla superficie, tale integrale risulta nullo. Possiamo quindi scrivere:
(13.36)
La forza F agendo sulle cariche contenute in V impartisce a queste una accelerazione. Denotiamo con GM la quantità di moto totale delle particelle cariche in
V. Per la legge di Newton possiamo scrivere:
(13.37)
Dalla (13.36) si ricava pertanto:
(13.38)
da cui si vede che, per un sistema elettromagnetico isolato, la quantità di moto
meccanica GM non è una costante del movimento, ma è invece tale la grandezza
che si ottiene aggiungendo ad essa il termine:
(13.39)
Detto termine prende il nome di quantità dì moto o impulso elettromagnetico. Il
vettore:
(13.40)
ha pertanto il significato di densità della quantità di moto elettromagnetica.
13.4 Potenziali del campo elettromagnetico
Riprendiamo in considerazione il sistema (13.13) delle equazioni di Maxwell.
L'espressione :
div B = 0
(13.41)
dice che il vettore B è a divergenza nulla, ossia, come si suol dire, che esso è un
vettore solenoidale. Come conseguenza di questo fatto sappiamo che esiste
156
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
un vettore A detto potenziale magnetico o potenziale vettore tale che :
B = rot A.
Con questa posizione l'altra equazione di Maxwell:
(13.42)
(13.43)
si può scrivere:
(13.44)
∂A
è a rotore nullo o, come si suol dire, irro
∂t
tazionale. Per un noto teorema di calcolo vettoriale esiste uno scalare ψ tale che :
la quale esprime che il vettore E +
(13.45)
Ponendo poi ψ = - ϕ, si potrà scrivere :
(13.46)
Chiameremo ϕ potenziale scalare o potenziale elettrico.
È importante notare il fatto che i potenziali A e ϕ, funzioni di x, y, z, e di t,
introdotti per mezzo delle relazioni (13.42) e (13.46), non risultano
completamente determinati. Nei problemi pratici di elettrodinamica si limita la
notevole arbitrarietà, che è una conseguenza delle predette incomplete definizioni,
imponendo la condizione che A e ϕ soddisfino all'equazione supplementare (detta
di Lorentz):
(13.47)
Si noti che questa condizione non comporta alcuna limitazione alle soluzioni
dei problemi fisici, i quali si debbono sempre poter esprimere come relazioni fra
le grandezze E e H che definiscono effettivamente il campo : e queste grandezze
sono completamente determinate dalle equazioni di Maxwell, indipendentemente
dal fatto che esse si esprimano in funzione di altre grandezze, quali i potenziali A
e ϕ, che possono o no venir definiti in modo completo.
Vogliamo ora scrivere, limitandoci per semplicità al caso di un mezzo
omogeneo isotropo e lineare (ε = cost) le equazioni differenziali del secondo
ordine a cui soddisfano i potenziali A e ϕ.
13.4]
POTENZIALI DEL CAMPO ELETTROMAGNETICO
157
Sostituendo la (13.46) nell'equazione:
(13.48)
si ha:
(13.49)
Tenendo conto dell'equazione supplementare (13.47) e della relazione:
(13.50)
si ottiene l'equazione:
(13.51)
Analogamente, sostituendo nell'equazione:
(13.52)
la (13.42) e la (13.46), tenendo conto delle relazioni tra H e B e tra E e D, si ha:
(13.53)
Trasformando il primo membro per mezzo della nota relazione di calcolo vettoriale :
(13.54)
si ha:
(13.55)
onde, tenendo al solito conto dell'equazione supplementare (13.47), si trova:
(13.56)
Le (13.51) e (13.56) costituiscono le equazioni differenziali del secondo ordine a
cui soddisfano i potenziali del campo elettromagnetico.
158
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
Di notevole interesse sono le soluzioni di queste equazioni, che ci limitiamo a
riportare senza dimostrazione:
(13.57)
dove si è posto v = 1 / εμ = 1/J/e/z e la scrittura [ ]t - r/v sta ad indicare il valore
che la funzione entro parentesi assume in ogni punto Q (distante r da P) al tempo
t - r/v (essendo r/v il tempo necessario per percorrere con la velocità v la distanza
r).
Queste soluzioni esprimono quindi il ben noto fatto che una perturbazione
elettromagnetica si propaga in un mezzo qualsiasi omogeneo con la velocità
costante v ; in altri termini i potenziali ϕ e A, generati da una certa distribuzione
di cariche e di correnti, si fanno sentire nei vari punti dello spazio con un certo
ritardo. Per questa ragione ϕ e A, dati dalla (13.57), si dicono potenziali ritardati
e le equazioni (13.51) e (13.56) che li definiscono si dicono equazioni dei
potenziali ritardati.
13.5 Equazione generale delle onde
Una delle più importanti applicazioni delle equazioni di Maxwell consiste
nella possibilità di dimostrare che, come conseguenza di esse, esistono campi
elettromagnetici che si possono propagare in un mezzo con legge analoga a quella
dei moti ondosi. Si suole pertanto parlare di onde elettromagnetiche.
Premettiamo una osservazione sul vettore densità di corrente J. Nel caso che il
mezzo, supposto omogeneo, sia conduttore, vale la legge di Ohm:
J=σE
(13.58)
essendo σ la conducibilità elettrica. Se il mezzo è isolante si pone invece σ = 0
per cui J = 0.
Tratteremo dapprima il caso di un mezzo conduttore omogeneo indefinito.
Applicando l'operatore rotore ai vettori che costituiscono i due membri
dell'equazione:
(13.59)
abbiamo :
(13.60)
13.5]
EQUAZIONE GENERALE DELLE ONDE
159
che ponendo D = ε E, J = σ E si scrive:
(13.61)
Valendosi dell'altra equazione di Maxwell:
(13.62)
e ricordando la relazione vettoriale valida per un vettore u qualsiasi rot rot u =
grad div u - ∇2 u, la (13.61) si scrive:
(13.63)
Ma essendo per un mezzo omogeneo:
(13.64)
si ottiene per H l'equazione delle onde:
(13.65a)
Considerando ora il vettore E, con un procedimento del tutto analogo e
supponendo il mezzo privo di cariche libere, per cui ρ = 0 e quindi div D = 0. si
ottiene:
(13.65b)
Le equazioni precedenti nel caso di un mezzo isolante, per cui σ = 0, si riducono
alle:
(13.66)
Si noti che le equazioni delle onde (13.65), o le (13.66) per un mezzo isolante,
determinano E e H in maniera non completa. Infatti esse sono state ricavate dalle
primitive equazioni di Maxwell eseguendo delle derivazioni per cui non è detto
che le loro soluzioni siano necessariamente tutte anche soluzioni
160
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
delle equazioni di Maxwell. Per avere soluzioni delle onde che siano soluzioni
anche delle equazioni di Maxwell occorre sostituire le soluzioni delle equazioni
delle onde nelle primitive equazioni di Maxwell e vedere quali condizioni si
devono imporre affinchè anche quest'ultime equazioni siano effettivamente
soddisfatte.
Facciamo notare che, introducendo l'operatore dalembertiano ≡
∂2
≡ ∇ 2 − εμ 2 l'equazione delle onde si può scrivere nella forma:
∂t
H=0
e
E=0
13.6 Onde piane in un mezzo omogeneo isolante.
Ponendo :
(13.67)
le (13.66) si scrivono:
(13.68)
Ricordiamo che queste sono una conseguenza delle equazioni di Maxwell le quali,
per il caso che stiamo trattando, si scrivono:
(13.69)
Ci proponiamo di trovare, se è possibile, una soluzione particolare delle
(13.69), e quindi anche delle (13.66), la quale risulti indipendente dalle variabili y
e z. Detta soluzione dovrà cioè essere tale che i vettori E e H siano funzioni
13.6]
ONDE PIANE IN UN MEZZO OMOGENEO ISOLANTE
161
unicamente di x e di t. Fisicamente ciò significa che tali vettori avranno, ad un
dato istante, lo stesso valore in tutti i punti di un piano normale all'asse x. In
conseguenza dell'ipotesi assunta ogni componente del campo elettrico e
magnetico soddisferà alla seguente equazione che deriva immediatamente dalle
(13.66):
(13.70)
La (13.70) è la nota equazione delle corde vibranti di cui è conosciuta la
soluzione. Nel caso generale, questa è del tipo:
(13.71)
essendo le fi delle funzioni generiche.
Ci limitiamo qui a provare che la f1 (x - vt) e la f2 (x + vt) sono soluzioni della
(13.70), procedendo per semplice sostituzione.
Si ha infatti (indicando con l'apice la derivata della funzione rispetto al suo
argomento) :
(13.72)
da cui si vede che la (13.70) risulta soddisfatta.
In modo analogo si verifica che la f2 (x + vt) è pure soluzione della (13.70).
Essendo poi questa un'equazione lineare, anche la
è soluzione della stessa.
Veniamo ora al significato fisico delle funzioni f1 (x - vt) e f2 (x + vt). La prima
rappresenta una perturbazione che si propaga lungo il verso positivo dell'asse x
con velocità v (onda progressiva), la seconda una perturbazione che si propaga
lungo il verso negativo dello stesso asse con la stessa velocità v (onda
regressiva).
Infatti la perturbazione f1 all'istante t1 e nel punto x1 ha il valore f1 (x1 - vt1). Ma
tale valore, come è mostrato in Fig. 13.2, è ritrovato nel punto x2 = x1 + Δx
all'istante t2 = t1 + τ dato che si ha:
(13.73)
e questo vale solo se gli argomenti della funzione f1 sono uguali ; ne deduciamo
che nel tempo τ la perturbazione ha subito uno spostamento Δx = (x2 - x1) = ντ,
muovendosi quindi con la velocità v in direzione delle x positive.
162
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
13.2 - Onda progressiva: perturbazione propagante lungo il verso positivo dell'asse x
con velocità v = (x2 - x1) /τ
FIG.
È d'altra parte facile mostrare che la quantità v = 1 / εμ ha le dimensioni di
una velocità. Infatti:
(13.74)
Nel caso dello spazio libero si ha che v = c = 1 / ε 0 μ 0 = 2,9979 ⋅ 108 m/s che
rappresenta la velocità della luce nel vuoto.
Considerazioni analoghe si possono fare per l'interpretazione di f2 (x + vt).
Cerchiamo ora di esplicitare le espressioni delle componenti di E e di H.
Cominciamo con l'osservare che per le componenti Ex, Hx le equazioni div E = 0 e
divH = 0 danno:
(13.75)
e le rimanenti due equazioni di Maxwell relative al rotore di E e di H portano
alle:
Avremo quindi (introducendo delle funzioni generiche ψi, χi, γi, δi):
(13.76)
(13.77)
Per le applicazioni pratiche interessano solo i fenomeni che si manifestano nei
campi variabili, per cui potremo trascurare gli effetti delle componenti longitudinali costanti c1 e c2 ed assumere Ex = Hx = 0. Con questa posizione la
soluzione considerata rappresenterà delle onde trasversali che si propagano,
13.6]
ONDE PIANE IN UN MEZZO OMOGENEO ISOLANTE
163
sovrapponendosi, nei due sensi dell'asse x, con velocità v. Di regola poi nelle
applicazioni si hanno da considerare onde che si propagano solo in un senso
dell'asse x (ad esempio in avanti, cioè lungo il senso positivo dell'asse x);
porremo quindi :
Con ciò la soluzione in considerazione sarà rappresentata dalle espressioni:
(13.78)
Ricordiamo però che, come già si è detto, le varie funzioni che compaiono
nelle (13.78) non sono tra loro indipendenti, ma risultano legate da relazioni.
Infatti, nell'eliminazione operata per dedurre le equazioni del secondo ordine
(13.68) da quelle primitive di Maxwell, si sono eseguite le derivazioni, per cui
non è detto che le soluzioni delle (13.68) soddisfino anche le (13.69).
Occorre pertanto sostituire le (13.78) nelle (13.69) e vedere quali condizioni si
devono imporre affinchè queste ultime risultino soddisfatte. Eseguendo tale
sostituzione si trovano precisamente le seguenti condizioni:
(13.79)
(l'apice indica derivazione rispetto all'argomento della funzione). Tenendo conto
dell'espressione di v si ha che le equazioni della prima coppia sono identiche fra
loro e così pure quelle della seconda. In definitiva le varie funzioni risultano fra
loro legate dalle relazioni (naturalmente la costante di integrazione può essere
presa eguale a zero):
(13.80)
da cui derivano per conseguenza le seguenti:
(13.81)
Questo legame può anche essere scritto in forma sintetica vettoriale. Infatti,
denotato con i il versore dell'asse x, che nel nostro caso coincide con la direzione
di propagazione, si ha:
(13.82)
164
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
con E perpendicolare a i ma diretto in modo qualsiasi. Possiamo così concludere
che per un'onda «piana», un'onda cioè in cui campo elettrico e campo magnetico
risultano costanti su ogni piano perpendicolare alla direzione di propagazione,
campo elettrico, campo magnetico e direzione di propagazione formano una
terna ortogonale. Inoltre le ampiezze di E e di H sono legate in ogni punto ed in
ogni istante, dalle relazioni (13.81) e la velocità di propagazione è data dalla
(13.67).
I risultati ottenuti sono tali da poter essere messi in diretto raffronto con alcuni
dati sperimentali. Allo scopo osserviamo che, secondo quanto risulta dall'ottica,
si definisce indice dì rifrazione assoluto di un mezzo la quantità :
(13.83)
dove c rappresenta la velocità di propagazione della luce nel vuoto e v la velocità
di propagazione della luce nel mezzo. Confrontando questa relazione con la
(13.67) troviamo, come risultato derivante dalle equazioni di Maxwell, che deve
essere:
(13.84)
Praticamente però, dato che la permeabilità magnetica relativa dei corpi trasparenti, e quindi non ferromagnetici, è estremamente prossima ad uno, si ha con
sufficiente approssimazione che:
(13.85)
Il confronto fra i valori sperimentali di n e quelli di ε r , è mostrato nella tabella
13.1 dove sono riportati gli indici di rifrazione corrispondenti alla riga D del
sodio.
Tabella 13.1.
Sostanza
Ossigeno .........................
Azoto ..............................
Idrogeno .........................
Aria. ..................... .........
Anidride Carbonica .......
Acqua ............................
Vetro (flint) ..................
Solfuro di carbonio .......
Benzolo ...........................
Allume ..........................
n
εr
1,000272
1,000297
1,000132
1,000295
1,000473
1,333
1,51
1,63
1,502
1,46
1,000273
1,000300
1,000138
1,000294
1,000450
9
2,5
1,65
1,514
2,58
13.7]
ONDE SINUSOIDALI
165
Come si vede, la relazione (13.85) è in alcuni casi ben verificata, specialmente
per i gas, in altri casi invece essa cade completamente in difetto. La ragione di
questa discrepanza è da ricercarsi nel fatto che la costante dielettrica, quale risulta
dalle misure ordinarie, è dedotta dalla polarizzazione elettrica della sostanza sotto
l'azione di campi elettrici costanti; i campi elettrici della radiazione luminosa sono
invece variabili con frequenze dell'ordine di 1015 periodi al secondo, e per tali
frequenze l'azione del campo elettrico è assai diversa che per i campi statici : in
altri termini, i fenomeni di polarizzazione e conseguente-mente i valori di εr,
dipendono dalla frequenza del campo elettrico stesso. Ne consegue che anche n è
funzione della frequenza, cioè che in generale il mezzo è dispersivo: questo è di
regola il comportamento delle sostanze. E poiché, com'è ovvio, er tende al valore
elettrostatico per v → 0, ossia λ → ∞, è da presumere che la (13.85) sia verificata
tanto meglio quanto maggiore è il valore di λ in corrispondenza del quale viene
misurato l'indice di rifrazione: difatti le onde hertziane la verificano già meglio
che non le luminose (1).
D'altra parte l'equivalenza fra onde luminose ed onde elettromagnetiche è stata
successivamente dimostrata in modo diretto e completo. Difatti l'odierna tecnica
elettronica permette di realizzare opportuni generatori di microonde di lunghezze
così corte (onde millimetriche) da sovrapporsi a quelle dell'estremo spettro
infrarosso di alcune molecole. L'esperienza permette di verificare come il
comportamento dei due tipi di onde sia perfettamente equivalente.
13.7
Onde sinusoidali
Se nella soluzione dianzi ottenuta dell'equazione delle onde, che, come
abbiamo detto, rappresenta il propagarsi di un'onda piana, poniamo ulteriormente
Ez = 0, si ottiene dalle (13.81) che Hy = 0 e che:
(13.86)
In questa soluzione particolare il campo elettrico varia nel tempo mantenendosi
sempre parallelo all'asse y: si suol dire che l'onda è polarizzata rettilineamente
lungo l'asse y. Se in particolare si considerano onde in cui la vibrazione del campo
elettrico avviene secondo una legge sinusoidale, (vedi Fig. 13.3) e cioè ad
esempio:
(13.87)
(1) Le onde hertziane hanno lunghezze d'onda comprese tra 104 e 10-4 metri, mentre
le onde luminose sono caratterizzate da lunghezze d'onda comprese tra 10-6 e 10-7
metri.
166
FIG. 13.3
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
- Onda sinusoidale polarizzata linearmente.
per la (13.86) abbiamo:
(13.88)
Queste soluzioni rappresentano fisicamente la propagazione di un'onda
monocromatica avente lunghezza d'onda λ, ampiezza E0y per il campo elettrico e
H0z, per il campo magnetico e fase iniziale β. Per un istante t fissato abbiamo che
la distanza tra due punti nei quali il campo assume lo stesso valore è uguale alla
lunghezza d'onda. Se ci poniamo fissi in un punto, l'intervallo di tempo, chiamato
periodo ed indicato con il simbolo T, che è necessario attendere perché il campo
riacquisti lo stesso valore risulta legato alla lunghezza d'onda ed alla velocità di
propagazione dalla relazione:
(13.89)
1
dell'onda, la lunghezza d'onda λ e la velocità di
T
propagazione v vale perciò la relazione:
Tra la frequenza v =
(13.90)
Chiameremo inoltre pulsazione dell'onda la quantità ω = 2πv. Da un punto di
vista analitico sono però possibili anche soluzioni dell'equazione (13.69) che si
possono ottenere dalla sovrapposizione di tante funzioni del tipo (13.87) e (13.88),
ma ognuna di esse è caratterizzata da un diverso valore della frequenza v; si può
pure dimostrare che ogni generica soluzione del tipo (13.77) può essere
rappresentata come sovrapposizione di una successione discreta (serie di Fourier)
o continua (integrale di Fourier) di onde sinusoidali di frequenza diversa. Da un
punto di vista fisico, questo risultato trova riscontro nel fatto che ogni vibrazione
elettromagnetica complessa si può risolvere spettroscopicamente
13.7]
ONDE SINUSOIDALI
167
in tante vibrazioni semplici di frequenza diversa (principio di sovrapposizione).
Si noti che finora abbiamo sempre assunto per semplicità l'asse x (di versore i)
come direzione di propagazione dell'onda. Ciò è rispecchiato ad esempio nella
formula (13.82).
Esplicitando questa nel caso di un'onda monocromatica possiamo scrivere:
(13.91)
essendo cp la fase dell'onda che, definendo :
e ricordando le relazioni tra λ, v, ν ed ω è data da:
(13.92)
(13.93)
Come è facile vedere dalla (13.93), ad un determinato istante t = t0 le superficie a
fase costante (superficie equifase) sono dei piani perpendicolari all'asse x. In altri
termini E ed H assumono gli stessi valori in tutti i punti di un piano x = cost.
Se si suppone invece che l'onda piana si propaghi lungo una direzione individuata da un versore generico u (non necessariamente coincidente con l'asse
delle ascisse) le superficie a fase costante sono allora, in un dato istante, i piani
normali a tale direzione. Pertanto, ad un istante fissato t = t0, un punto generico P,
la cui posizione è individuata rispetto ad un'origine O dal vettore r = OP,
appartiene alla superficie di fase coincidente con il piano Π (in Fig. 13.4 né è
disegnata la traccia) passante per P e normale alla direzione del versore u.
FIG.
13.4 - Onda piana che propaga in una direzione generica u.
Ciò equivale ad assumere, come fase ϕ, anziché la (13.93), l'espressione:
ϕ = (k ⋅ r - ωt + β)
(13.94)
168
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
dove si è posto:
k = k u.
(13.95)
Il vettore k, parallelo alla direzione di propagazione dell'onda, viene chiamato
vettore di propagazione.
Si può quindi scrivere l'equazione generale dell'onda piana nel modo seguente:
(13.96)
con E arbitrario purché perpendicolare ad u. La (13.96) costituisce la cosiddetta
equazione del raggio per la radiazione elettromagnetica.
13.8 Rappresentazione complessa delle onde
Se una radiazione monocromatica di frequenza v =
ω
propaga lungo il senso
2π
positivo dell'asse x, la grandezza vibrante ψ è espressa, secondo quanto visto nel
paragrafo precedente, dalla equazione:
(13.97)
Un'altro modo di rappresentare un'onda monocromatica si ha scrivendo
l'equazione (13.97) sotto forma complessa:
(13.98)
dove con j abbiamo indicato la quantità − 1 .
Si osservi infatti che anche questa espressione è una soluzione dell'equazione
delle onde (13.70). In questa rappresentazione è poi evidente che la ψ è una
quantità complessa, ma si conviene di far corrispondere ad essa la stessa
grandezza fìsica che, nella rappresentazione reale consueta, viene ad essere
rappresentata dalla parte reale della (13.98). Con questa convenzione le scritture
(13.97) e (13.98) risultano equivalenti. Infatti si può scrivere:
(13.99)
prendendo, secondo la convenzione fatta, la sola parte reale di questa espressione
si ha proprio la (13.97).
L'espressione esplicita dei vettori E ed H che caratterizzano l'onda piana
(13.96) propagante nella generica direzione individuata dal versore u nella
13.9]
ONDE PIANE MONOCROMATICHE IN UN MEZZO CONDUTTORE
169
rappresentazione complessa è data da:
(13.100)
con E0 arbitrario purché perpendicolare ad u.
13.9 Onde piane monocromatiche in un mezzo conduttore
Dato un mezzo conduttore omogeneo indefinito, caratterizzato nelle equazioni
di Maxwell dal termine J = σE, le equazioni delle onde elettromagnetiche che in
esso propagano si possono ancora dedurre seguendo un procedimento analogo a
quello usato per il caso di un mezzo isolante.
Tali equazioni risultano essere:
(13.101)
Nel caso di un'onda piana monocromatica che propaga lungo l'asse x, si ha per
una generica componente ψi (x, t) trasversale di E e di H l'espressione:
dove la funzione complessa Φ (x) soddisfa all'equazione :
(13.102)
(13.103)
Questa ammette una soluzione del tipo:
dove γ risulta dato dall'equazione algebrica:
(13.104)
(13.105)
La tecnica ordinaria dell'algebra dei numeri complessi permette, posto
γ = α + jβ, di determinare parte reale a e coefficiente β del numero complesso γ.
170
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
Si trova con qualche calcolo:
(13.106)
L'onda piana che propaga nel verso positivo dell'asse x è caratterizzata
dall'espressione:
(13.107)
che rappresenta un'onda smorzata nella direzione di propagazione. Nel caso in cui
σ » εω il coefficiente di smorzamento assume l'espressione assai semplice :
(13.108)
Il termine d=1/β misura la distanza alla quale un'onda elettromagnetica che
penetra in un mezzo conduttore si riduce nell'intensità a 1/e-esimo (vale a dire
~ 1/3) del suo valore iniziale. Ad esempio per l'argento, per frequenze dell'ordine
di 1010 hertz, si ha σ = 3-107 mho/m, per cui
(13.109)
da cui si vede come la penetrazione delle onde sia assai piccola.
13.10 Quantità di moto, energia, intensità di un'onda elettromagnetica
Come abbiamo visto nei paragrafi 13.2 e 13.3 a un campo elettromagnetico
contenuto in una regione di volume V in un mezzo di natura qualsiasi sono associate una energia W e una quantità di moto Gem date da :
(13.110)
essendo w e g le densità rispettivamente di energia e di quantità di moto:
(13.111)
Nel caso di un'onda elettromagnetica piana che propaga in un mezzo omogeneo
13.10]
QUANTITÀ DI MOTO, ENERGIA, INTENSITÀ DI UN'ONDA
171
ricordiamo che essa è caratterizzata da due vettori ortogonali E e H i cui
moduli soddisfano alla relazione ε E= μ H
e che la velocità di propaga
zione è data da v =
1
εμ
Avremo pertanto:
(13.112)
(13.113)
essendo S il vettore di Poynting.
Dal confronto delle due si ottiene:
(13.114)
e
(13.115)
essendo u il versore della direzione di propagazione dell'onda.
È questa una relazione assai importante che stabilisce uno stretto legame fra
l'energia e la quantità di moto della radiazione che propaga in un mezzo e
in particolare nel vuoto (per cui si ha v = c= 1 / ε 0 μ0 ).
Si noti che, secondo l'ipotesi dei quanti, la radiazione è costituita da fotoni
ciascuno dei quali propaga, ad esempio nel vuoto, con velocità c e trasportando
una energia hv. Dalla (13.115) consegue che ad ogni fotone è pure associata
hv
una quantità di moto
u.
c
Questo risultato trova una precisa conferma sperimentale, ad esempio nell'effetto Compton.
L'energia trasportata da un'onda elettromagnetica nell'unità di tempo attraverso
una superficie unitaria ortogonale alla direzione di propagazione è uguale
a wv. Considerando la (13.112) e ricordando che v= 1 / εμ possiamo inoltre
scrivere che:
(13.116)
In particolare se il campo E ha un andamento sinusoidale del tipo:
(13.117)
172
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
la (13.116) diviene:
(13.118)
Questa quantità è una funzione del tempo rapidamente variabile e i suoi valori
istantanei non possono essere misurati sperimentalmente. In pratica per
rappresentare gli effetti osservabili di una radiazione, soprattutto di quella
luminosa, si preferisce definire una nuova grandezza I, detta intensità dell'onda
elettromagnetica uguale al valore medio dell'energia trasportata dall'onda
nell'unità di tempo attraverso l'unità di superficie normale alla direzione di
propagazione. Tale definizione tiene conto essenzialmente del fatto che
normalmente i rivelatori della radiazione visibile sono sensibili agli effetti termici
della luce i quali risultano proporzionali alla quantità media di energia assorbita
nell'unità di tempo. Eseguendo allora la media temporale della (13.118) troviamo
che per l'intensità I vale la relazione:
(13.119)
dove la media è stata eseguita su un tempo pari ad un periodo T dell'onda.
Come abbiamo già mostrato nel paragrafo 12.14 l'integrale che compare nella
(13.119) vale T/2 e pertanto:
(13.120)
Facciamo notare che quest'ultima espressione è valida solo nel caso particolare di
un'onda piana per cui valgono le relazioni (13.81) per la componente del vettore
elettrico e di quello magnetico. Nel caso più generale vale la relazione:
dove w rappresenta il valor medio della densità di energia elettromagnetica.
Il fatto che all'energia elettromagnetica sia sempre associata una quantità di
moto ha come conseguenza l'esistenza di una pressione, che la radiazione
elettromagnetica esercita su di uno schermo sul quale incida.
Consideriamo dapprima il caso di uno schermo perfettamente assorbente. Sia S
la sezione di detto schermo ed w la densità di energia trasportata sullo schermo
nell'unità di tempo da parte della radiazione, che supponiamo dapprima incidere
normalmente. Se tale radiazione è costituita da un gruppo d'onde (1) di lunghezza
l, la quantità di energia raccolta sullo schermo, nel
(1) Per gruppo d'onde di lunghezza l s'intende una successione di onde che si estende
per un tratto / lungo la direzione di propagazione.
13.10]
QUANTITÀ DI MOTO, ENERGIA, INTENSITÀ DI UN ONDA
173
l
tempo t = è W=wlS; a questa energia è associata una quantità di moto data da
c
wlS
. Questa quantità di moto, posseduta dalla radiazione viene trasmessa
G em =
c
interamente allo schermo assorbente, sul quale pertanto, in virtù del noto teorema
dell'impulso (Ft = G) si esercita una pressione p data dalla relazione :
(13.121)
da cui, ricordando che è
l
= t si ricava:
c
p = w (schermo assorbente e incidenza normale) .
(13.122)
Se lo schermo, anziché assorbente, è invece perfettamente riflettente, esso
subisce una pressione doppia, perché invertendo il gruppo d'onde, a cui è associato il propagarsi della radiazione, il suo verso, in seguito all'urto sullo schermo,
si ha una variazione della quantità di moto doppia di quella che si manifesta nel
processo di assorbimento. Si ha cioè:
p = 2w (schermo riflettente e incidenza normale).
(13.123)
Supponiamo ora che la radiazione, anziché propagare lungo la direzione
normale dello schermo, sia distribuita isotropicamente in tutte le direzioni dello
spazio. Sia:
w = εE2
(13.124)
la densità dell'energia elettromagnetica associata alla radiazione. Riferendosi ad
un sistema di assi cartesiani ortogonali si ha:
(13.125)
onde potremo scrivere:
w = wx + wy + w z
(13.126)
avendo posto:
(13.127)
Ma, avendo supposto che la distribuzione spaziale della radiazione sia
isotropa, si ha wx = wy = wz, onde per la (13.126) il valore comune di queste tre
grandezze è :
(13.128)
174
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
Si deduce quindi immediatamente, ricordando i risultati stabiliti nel caso
dell'incidenza normale, che la pressione esercitata dalla radiazione elettromagnetica, distribuita in modo isotropo nello spazio, su di uno schermo assorbente
vale:
(13.129)
e quella su di uno schermo riflettente:
(13.130)
13.11 Condizioni al contorno per campi variabili
Le condizioni al contorno che debbono essere soddisfatte da campi elettrici e
magnetici sulla superficie di separazione fra mezzi diversi possono essere dedotte
ricorrendo alle equazioni stesse cui soddisfano i campi, vale a dire in questo caso
alle equazioni di Maxwell. D'altra parte problemi di questo tipo sono stati da noi
affrontati nello studio del comportamento dei vettori E, D e B, H in elettrostatica
e magnetostatica per cui qui ci limiteremo a ricavare in modo coinciso le sole
relazioni fondamentali.
13.5 - Calcolo delle condizioni al contorno sulla superficie di separazione Σ per i
vettori elettrici e magnetici.
FIG.
Data una superficie Σ di separazione tra due mezzi qualsiasi, consideriamo,
come mostrato in Fig. 13.5, un piccolo cilindro intersecato da Σ con superficie di
base Δa. Integrando l'equazione di Maxwell:
(13.131)
su tutto il volume V del cilindretto otteniamo:
(13.132)
13.11]
CONDIZIONI AL CONTORNO PER CAMPI VARIABILI
175
Applicando il teorema della divergenza all'integrale a sinistra abbiamo:
(13.133)
dove a rappresenta la densità superficiale di carica posta su Σ, che in particolare
può anche essere nulla. È facile vedere che facendo tendere a zero l'altezza del
cilindretto gli unici contributi non nulli al flusso D sono quelli attraverso le due
basi. Dopo semplici passaggi si trova così che:
(13.134)
avendo indicato con D1n e D2n le componenti del vettore D normali alla superficie
Σ, in punti molto prossimi ad essa, rispettivamente nel primo e nel secondo
mezzo. Se ripetiamo lo stesso calcolo con l'altra equazione di Maxwell:
(13.135)
ricaviamo le condizioni al contorno per le componenti di B normali alla superficie
Σ, e cioè:
(13.136)
Prendiamo ora in esame un piccolo cammino chiuso C, come mostrato in Fig.
13.5, con basi di lunghezza Δl ed altezza Δh, intersecato dalla superficie di
separazione Σ. Calcoliamo il flusso attraverso C di rot E.
Essendo :
(13.137)
Si ha:
(13.138)
Trasformando l'integrale a sinistra mediante il teorema di Stokes questa
espressione diviene:
(13.139)
Se facciamo tendere a zero l'altezza Ah del circuito C, mantenendo le due basi da
parti opposte rispetto a Σ, possiamo calcolare l'integrale di linea lungo C
considerando i soli due tratti di lunghezza Δl mentre l'integrale di superficie si
176
TEORIA DEL CAMPO ELETTROMAGNETICO
annulla purché
[CAP. 13
∂B
sia finito. Dalla (13.139) ricaviamo pertanto:
∂t
(13.140)
relazione che fornisce le condizioni di contorno per le componenti di E tangenti
alla superficie Σ.
Con procedimento analogo, partendo dalla quarta equazione di Maxwell:
(13.141)
troviamo infine che per le componenti di H tangenziali a Σ vale la condizione al
contorno:
(13.142)
dove Js è la corrente superficiale, misurata in ampere per metro, che fluisce sulla
superficie di separazione attraverso il circuito C. La corrente Js rappresenta una
corrente finita in uno strato infinitesimo ed è diversa da zero solo nel caso di
conducibilità infinita di uno dei due mezzi.
Come problema particolare supponiamo che il primo mezzo sia il vuoto o un
dielettrico ed il secondo un conduttore con conducibilità infinita. In questo caso
la profondità di penetrazione del campo elettromagnetico nel conduttore, come
risulta da quanto detto nel paragrafo 13.9, è nulla e perciò E2, D2, B2 e H2 sono
uguali a zero.
Riconsiderando allora sotto questa ipotesi le quattro espressioni appena
ricavate per le condizioni al contorno dei campi, troviamo che esse per il nostro
esempio si riducono a:
(13.143)
Si vede così come sulla superficie di separazione compaiono cariche indotte e
correnti con valori che sono determinati dall'intensità del campo elettromagnetico
applicato.
13.12 Riflessione e rifrazione delle onde elettromagnetiche
Immaginiamo due mezzi dielettrici separati da una superficie, rappresentata in
Fig. 13.6 mediante il piano xy. Consideriamo un'onda piana monocromatica (1)
che provenendo dal primo mezzo incida sulla superficie di separazione:
(1) Si può dimostrare che quanto ricaveremo nel seguito di questo paragrafo vale non
solo nel caso di un'onda monocromatica ma anche per un'onda qualsiasi.
13.12]
RIFLESSIONE E RIFRAZIONE DELLE ONDE ELETTROMAGNETICHE
177
l'esperienza mostra che una parte dell'onda viene trasmessa (o rifratta) ed una
parte riflessa. Indichiamo con ϑ l'angolo di incidenza rispetto alla normale alla
superficie di separazione orientata come l'asse z e prendiamo l'asse y in modo che
il piano yz contenga la direzione di propagazione dell'onda incidente e coincida
quindi con il piano di incidenza (definito come il piano contenente la normale alla
superficie di separazione e la direzione di propagazione).
FIG.
13.6 - Riflessione e rifrazione di un'onda elettromagnetica su una superficie di
separazione tra due dielettrici.
Per quanto detto, avremo che i coseni direttori della direzione di propagazione,
individuata dal vettore k di modulo k = ω/v1 (v1 essendo la velocità dell'onda nel
primo mezzo), rispetto agli assi cartesiani sono:
(13.144)
Facendo uso della notazione complessa possiamo scrivere il vettore E dell'onda
incidente mediante l'espressione:
(13.145)
Le componenti del campo E lungo l'asse x ed y (la componente lungo l'asse z non
è essenziale ai fini di quanto vogliamo dimostrare) sono:
(13.146)
178
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
Per quanto riguarda le onde riflessa e rifratta generate dall'onda incidente non
faremo altra ipotesi limitativa se non quella che esse sono due onde piane,
lasciando completamente indeterminate le loro ampiezze, le frequenze e le direzioni di propagazione. Se allora indichiamo con α x′ , α ′y , α z′ i coseni direttori
rispetto ai tre assi del vettore di propagazione dell'onda riflessa di modulo
k' = ω'/v1 e con α x′′ , α ′y′ , α z′′ , i coseni direttori del vettore di propagazione
dell'onda rifratta di modulo k' = ω'/v2, le componenti x ed y del campo elettrico
dell'onda riflessa sono:
(13.147)
e quelle dell'onda rifratta sono:
(13.148)
La condizione al contorno (13.140) per la componente tangenziale del vettore
E sulla superfìcie di separazione tra i due mezzi, e cioè per z = 0, nel nostro caso
si scrive:
(13.149)
ed
(13.150)
Sostituendo nelle (13.149) e (13.150) le espressioni (13.146), (13.147) e (13.148)
si ottiene:
(13.151)
e
(13.152)
Ogni termine contenuto nelle (13.151) e (13.152) dipende dalle variabili t, x ed y
e poiché le due espressioni devono essere valide per qualunque valore di queste
tre variabili è necessario che i coefficienti delle variabili negli esponenti siano
uguali. Abbiamo quindi che deve essere:
(13.153)
13.13]
CENNO ALLE ONDE EMERGENTI O CONVERGENTI IN UN PUNTO
179
La prima della (13.153) impone che le frequenze delle onde riflessa e rifratta
devono essere uguali a quelle dell'onda incidente. La seconda delle (13.153) dice
invece che le direzioni di propagazione delle onde riflessa e rifratta giacciono nel
piano di incidenza.
Riferendoci al disegno di Fig. 13.6, nel quale abbiamo indicato con &' e B" gli
angoli formati con l'asse z normale alla superficie di separazione tra i due mezzi,
dalle direzioni di propagazione dell'onda riflessa e dell'onda rifratta, abbiamo che:
(13.154)
Combinando le (13.154) con l'ultima delle (13.153) ricaviamo che:
(13.155)
Per quanto ricavato precedentemente, e cioè che ω = ω', sappiamo che k = k' e
pertanto la prima delle (13.155) diviene:
(13.156)
che rappresenta la legge della riflessione per la quale l'angolo di incidenza è
uguale all'angolo di riflessione. Dato inoltre che k ′ =
ω
v1
=
ω
c
n1 ed k ′′ =
ω
v2
=
ω
c
n2
la seconda delle (13.155) si scrive:
(13.157)
che rappresenta la nota legge di Snell per la rifrazione e cioè : il rapporto tra il
seno dell'angolo di incidenza e il seno dell'angolo di rifrazione è costante ed
uguale al rapporto tra la velocità dell'onda nel primo e la velocità dell'onda nel
secondo mezzo o ugualmente al rapporto tra l'indice di rifrazione assoluto del
secondo mezzo e l'indice di rifrazione assoluto del primo mezzo. Con nl2
indichiamo l'indice di rifrazione relativo del secondo mezzo rispetto al primo.
Per quanto riguarda il problema della determinazione dell'ampiezza dei vettori
elettrici e magnetici associati all'onda riflessa e all'onda rifratta in funzione
dell'ampiezza dei vettori dell'onda incidente e delle caratteristiche del mezzo,
nonché la discussione dei differenti possibili risultati, rimandiamo il lettore ad un
testo di elettromagnetismo più specializzato o ad un testo di ottica.
13.13 Cenno alle onde emergenti o convergenti in un punto
In un mezzo isolante omogeneo indefinito le onde emergenti o convergenti
sono rappresentate dalla soluzione dell'equazione delle onde:
180
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
(13.158)
corrispondente al caso che la ϕ sia funzione, oltre che del tempo t, della sola
distanza r da un punto fisso O, che diremo sorgente dell'onda. Esprimendo il
laplaciano in coordinate polari si ha:
(13.159)
Ponendo :
(13.160)
si ottiene per la χ l'equazione delle corde vibranti:
(13.161)
la cui soluzione generale è, come sappiamo, data da :
(13.162)
Il primo termine corrisponde a un'onda emergente da O, per cui:
(13.163)
il secondo a un'onda convergente per cui:
(13.164)
In particolare per un'onda monocromatica emergente o convergente avremo
rispettivamente :
(13.165)
o in forma esponenziale:
(13.166)
13.14]
RADIAZIONE DI UNA CARICA IN MOTO ACCELERATO
181
Naturalmente le relazioni fra i vettori E e H sono analoghe a quelle che abbiamo
visto nel caso delle onde piane.
13.14 Radiazione di una carica in moto accelerato
Sappiamo che cariche in moto vario emettono radiazioni elettromagnetiche ; in
questo paragrafo ci proponiamo di ricavare, anche se in maniera molto semplificata, l'espressione della potenza irradiata da una singola carica.
Consideriamo per esempio un elettrone che si muova nel vuoto con velocità u ;
la potenza P irradiata da questa carica in moto si ottiene calcolando il flusso del
vettore di Poynting S = (E × H) attraverso una superficie sferica contenente la
carica al suo centro; abbiamo:
(13.167)
Per calcolare questo integrale dobbiamo conoscere i valori che E ed H, generati
dall'elettrone, assumono sulla superficie sferica. Tali valori possono essere determinati per mezzo del potenziale scalare ϕ e del potenziale vettore A secondo
quanto è stato mostrato nel paragrafo 13.4.
Schematizzeremo l'elettrone come una distribuzione di carica di densità
volumetrica ρ in moto con velocità u localizzata in una regione molto piccola
dello spazio. I potenziali elettromagnetici generati nel vuoto da questa
distribuzione di carica nel punto r all'istante t secondo la (13.57) si scrivono
allora:
(13.168)
e
(13.169)
dove con r' abbiamo indicato la posizione delle sorgenti del campo all'istante
r − r′
t′ = t −
, precedente quindi l'istante t in cui si valuta l'effetto in r. La
c
difficoltà nell'eseguire il calcolo degli integrali che compaiono nella (13.168) e
(13.169) è dovuto principalmente al fatto che per i vari elementi di volume dυ'
dobbiamo considerare la funzione integrando a istanti t' diversi.
Prendendo in esame l'espressione del potenziale scalare ϕ, vediamo alla luce
di questa affermazione che l'integrale ρ (r ′, t ′)dυ ′ non rappresenta la carica
∫
totale situata nello spazio, carica che si otterrebbe nel caso in cui l'integrando
182
TEORIA DEL CAMPO ELETTROMAGNETICO
[CAP. 13
fosse considerato tutto allo stesso istante, ma che esso tiene conto in effetti del
moto delle cariche.
Per meglio chiarire questo concetto supponiamo di voler calcolare il potenziale
scalare ϕ al tempo t in un punto P distante r dall'origine delle coordinate.
Immaginiamo allora una sfera con centro nel punto P che si contragga con velocità uguale alla velocità delle onde elettromagnetiche nel vuoto e che si riduca al
punto P all'istante t. La superficie sferica in esame passa in particolare per un
punto r', in cui è situata la densità di carica che genera il campo, all'istante
r − r′
t′ = t −
. Sì può allora pensare che la superficie sferica cosi concepita
c
raccolga nella sua contrazione tutti i contributi alle densità di carica poste nello
spazio nei diversi punti r' negli istanti corrispondenti t'. Se la distribuzione di
carica ρ fosse ferma nello spazio la quantità di carica dq spazzata da un elemento
dS della superficie sferica che si contrae di dr nel tempo dt sarebbe dq = ρ dS dr.
Ma se la carica si muove con velocità u, diretta come mostrato in Fig. 13.7, allora
questa quantità risulta diminuita di:
Essendo dr/c = dt e dS dr = dυ', la quantità di carica effettivamente spazzata
da dS è:
._
(13.170)
dalla quale otteniamo che:
(13.171)
Ponendo questa espressione nella (13.168) si ricava che:
(13.172)
Se poi la distribuzione di carica è limitata ad un volume molto piccolo, come è nel
caso di un elettrone di carica e, i termini dipendenti dalla distanza variano molto
lentamente per cui possiamo considerare l'integrando come costante e scrivere :
(13.173)
13.14]
FIG.
RADIAZIONE DI UNA CARICA IN MOTO ACCELERATO
183
13.7 - Superficie sferica che si contrae con velocità c.
In maniera analoga per il potenziale vettore si ottiene:
(13.174)
Queste due espressioni rappresentano i potenziali di Lienard-Wiechert per
l'elettrone; dal procedimento seguito consegue che le grandezze fra le parentesi [ ]
r − r′
devono essere calcolate all'istante t ′ = t −
. Ritornando al nostro pro
c
blema del calcolo della potenza irradiata dall'elettrone in moto abbiamo che
l'espressione (13.167) in coordinate sferiche si scrive:
(13.175)
dove con (E × H)n indichiamo la componente normale alla superficie sferica del
vettore di Poynting e con R il raggio della superficie stessa.
Il campo elettrico E, per quanto detto nel paragrafo 13.4, è legato al potenziale
vettore A e al potenziale scalare ϕ dalla relazione:
(13.176)
Possiamo immaginare che a grandi distanze la radiazione emessa dall'elettrone sia
approssimabile con un'onda piana e quindi supporre che per le componenti
tangenti di E e di H valga la relazione E =
μ0
H
ε0
Per semplificare il calcolo trascureremo inoltre tutte le componenti di E e di H
che vanno a zero più rapidamente di 1/R. Come appare infatti dalla
184
TEORIA DEL CAMPO
ELETTROMAGNETICO
[CAP. 13
(13.175) per R molto grande il contributo di queste componenti è trascurabile (1).
Tale ipotesi permette di limitarci nella determinazione di E al solo calcolo del
∂A
termine −
essendo evidente che le componenti derivanti da - grad ϕ tendono
∂t
a zero più rapidamente di 1/R per R tendente all'infinito.
Il moto dell'elettrone avvenga lungo la direzione mostrata in Fig. 13.8 rispetto
al sistema di riferimento (in coordinate sferiche) assunto e l'elettrone passi per il
centro della sfera attraverso la quale vogliamo calcolare il flusso del vettore di
Poynting.
FIG. 13.8
- Elettrone in moto con velocità u.
Se la velocità u dell'elettrone è infine molto minore della velocità c della luce
allora la (13.174) si riduce a:
(13.177)
La sola componente di A tangente alla sfera è quindi:
(13.178)
e pertanto la componente tangente di E vale:
(13.179)
Per quanto detto possiamo scrivere:
(13.180)
(1) Con questa approssimazione si intende considerare solo il contributo del cosiddetto
campo di radiazione.
13.14]
dove u =
RADIAZIONE DI UNA CARICA IN MOTO ACCELERATO
185
du
rappresenta l'accelerazione dell'elettrone. Dalla (13.180) risulta
dt
che la potenza irradiata è diversa da zero solo se il moto della carica è accelerato,
dipende dal quadrato dell'accelerazione ed ha un massimo per ϑ = π/2,
perpendicolarmente cioè alla direzione del moto della carica.
Per la (13.175) si ha in definitiva che la potenza totale istantanea irradiata
dall'elettrone in moto abbastanza lento, per cui sono trascurabili le correzioni
relativistiche, è data da:
(13.181)
14
Onde elettromagnetiche in cavi coassiali e
guide d'onda
14.1
Introduzione
Nel capitolo precedente abbiamo illustrato le principali proprietà delle onde
elettromagnetiche nel caso di propagazione libera in un mezzo lineare, isotropo
ed omogeneo.
Ci sembra interessante aggiungere qualche semplice considerazione anche per
quanto riguarda la propagazione delle onde elettromagnetiche in quelle strutture,
quali i cavi coassiali e le guide d'onda, che sono normalmente utilizzate per la
trasmissione di segnali elettromagnetici in un sistema costituito da un generatore
di forza elettromotrice variabile nel tempo e da un carico.
Nello studio della propagazione dei campi elettromagnetici in tali strutture,
cioè della propagazione guidata, appaiono alcune caratteristiche delle onde che
differiscono da quelle tipiche della propagazione libera.
14.2
Onde in un cavo coassiale
Per la trasmissione di onde, soprattutto alle alte frequenze, trova ampia
applicazione il cavo coassiale. Esso è costituito da un filo conduttore
generalmente di rame posto lungo l'asse (o come si suol dire coassialmente)
all'interno di un conduttore cilindrico cavo e da questo separato mediante un
materiale isolante. Nei cavi coassiali flessibili normalmente il conduttore esterno
è formato da una calza di rame ed il materiale isolante riempie tutto lo spazio tra
conduttore centrale e conduttore esterno.
188
ONDE ELETTROMAGNETICHE IN CAVI COASSIALI
[CAP. 14
In questo paragrafo vogliamo determinare il comportamento dei campi,
elettrico e magnetico, delle cariche e delle correnti all'interno del cavo.
Assumiamo che il cavo sia formato da un conduttore cilindrico interno di
raggio a e da un conduttore cilindrico esterno cavo di raggio b e che il materiale
dielettrico fra essi frapposto abbia permittività dielettrica relativa εr e
permeabilità magnetica relativa μr ~1. Supponiamo inoltre il cavo infinitamente
lungo e caratterizziamo con la coordinata z, presa lungo l'asse, i piani
perpendicolari al cavo, a partire da un estremo.
Consideriamo l'equazione di Maxwell:
div D = ρ
(14.1)
e la superficie cilindrica S, mostrata in Fig. 14.1, coassiale con il conduttore centrale, limitata da due basi circolari di raggio r poste sui piani di coordinate z e
z + Δz. Chiamiamo q~ (z, t) la densità di carica lineare nel punto z e all'istante t,
cioè la grandezza dq/dz essendo dq la carica infinitesima distribuita sul tratto di
conduttore compreso fra z e z + dz.
FIG. 14.1
- Cavo coassiale.
Calcoliamo, per mezzo della (14.1), il flusso del vettore D attraverso la superficie S sopra definita assumendo che, come nel caso elettrostatico, il vettore D sia
diretto radialmente. Si trova così che:
(14.2)
Prendiamo ora in esame un cammino circolare C di raggio r con il centro sull’asse
FIG. 14.2
- Sezione di un cavo coassiale.
del conduttore interno, come mostrato in Fig. 14.2, posto sul piano perpendicolare
al cavo di coordinata z.
14.2]
ONDE IN UN CAVO COASSIALE
189
Utilizzando l'equazione di Maxwell:
(14.3)
calcoliamo il flusso di rot H attraverso la superficie S di contorno C. Applicando
il teorema di Stokes al termine che costituisce il primo membro dell'equazione,
abbiamo che:
(14.4)
Poiché il vettore D è diretto radialmente, l'ultimo integrale a destra è nullo e cosi
dalla (14.4) si ottiene che:
(14.5)
Consideriamo quindi il circuito C1 di Fig. 14.3 posto su un piano radiale ed
FIG. 14.3
- Determinazione del comportamento del campo elettrico e magnetico in un cavo
coassiale.
eseguiamo il calcolo del flusso attraverso la superficie S1, che ha per contorno C1
dei vettori che costituiscono i due membri della equazione:
(14.6)
applicando anche in questo caso al vettore a sinistra il teorema di Stokes, si ha :
(14.7)
Esplicitando questa equazione per il contorno in considerazione, è facile vedere
che deve essere:
(14.8)
190
ONDE ELETTROMAGNETICHE IN CAVI COASSIALI
[CAP. 14
e quindi che:
(14.9)
Se ripetiamo lo stesso procedimento per l'equazione:
(14.10)
su un circuito C2 posto in un piano perpendicolare alla direzione radiale r, di cui
in Fig. 14.3 è mostrata l'intersezione con il piano del foglio, ricaviamo inoltre che:
(14.11)
Se ora deriviamo la (14.9) rispetto a z e utilizziamo la (14.11) e le relazioni
B = μH e D = εE arriviamo per E all'equazione delle onde:
(14.12)
dove υ =
1
εμ
Operando in eguai maniera sulla (14.11) si arriva all'equazione
delle onde anche per H.
Ricordando la (14.2) deduciamo allora che anche per q deve valere
l'equazione:
(14.13)
~
La densità lineare di carica q (z, t) lungo il cavo ha pertanto un andamento del
tipo:
(14.14)
se ci limitiamo a considerare solo l'onda progressiva.
Immaginiamo adesso che ad una estremità del cavo, considerato sempre di
lunghezza infinita, sia applicato un generatore di forza elettromotrice variabile nel
tempo che fornisca una differenza di potenziale:
(14.15)
In un piano di coordinata z la differenza di potenziale tra il conduttore esterno e
quello interno del cavo vale:
(14.16)
14.3]
IL CAVO COASSIALE RAPPRESENTATO MEDIANTE ELEMENTI
191
che per la (14.2) e per la relazione D = eE si riduce a:
(14.17)
2πε
rappresenta la
b
ln
a
capacità C per unità di lunghezza di due cilindri coassiali, per cui :
Nel paragrafo 3.9 abbiamo mostrato che la quantità
(14.18)
Da questa espressione deduciamo che anche la differenza di potenziale V (z, t),
essendo proporzionale a q~ (z, t), deve soddisfare l'equazione delle onde. Potremo
quindi assumere in maniera del tutto generale:
(14.19)
Siamo arrivati così a dimostrare che lungo il cavo coassiale si propaga un'onda di
potenziale data dalla (14.19). A questo punto è facile far vedere come i campi E,
D, H e B, la densità lineare di carica q~ e la corrente I possano essere espresse in
funzione del potenziale V(z, t).
In particolare mediante la (14.18) e la (14.19) si ha che:
(14.20) e
utilizzando la (14.2), la (14.11) e la (14.5) si ricava che:
(14.21)
Questi risultati mostrano che tutte le quantità elettromagnetiche, per ogni z e t,
sono proporzionali e che viaggiano lungo il cavo con velocità v. Vogliamo far
notare che nella nostra esposizione, avendo considerato un cavo infinito, ci siamo
limitati alla discussione della sola onda progressiva. Evidentemente però la
soluzione generale comprende anche un'onda regressiva che assume significato
nel caso in cui il cavo sia limitato, a seguito degli effetti di riflessione che si
possono verificare sulle sezioni estreme del cavo.
14.3 Il cavo coassiale rappresentato mediante elementi concentrati
È possibile dimostrare che tutte le grandezze elettromagnetiche caratteristiche
di una linea di trasmissione sono descrivibili rappresentando il cavo coassiale, di
cui essa è costituita, come un circuito formato dalla successiva
192
ONDE ELETTROMAGNETICHE IN CAVI COASSIALI
[CAP. 14
ripetizione di una opportuna combinazione di elementi concentrati (condensatori, induttori, resistori), i valori dei quali dipendono dalla capacità, induttanza,
resistenza e conduttanza distribuita del cavo. Questo concetto è visualizzato
nella Fig. 14.4.
FIG.
14.4 - Linee di trasmissione in cui il cavo coassiale è rappresentato mediante
elementi concentrati.
Tale rappresentazione è ovviamente approssimata se gli elementi concentrati
hanno dimensioni finite mentre risulta esatta nel caso limite in cui ogni elemento
diventa infinitamente piccolo.
In questo paragrafo ci limiteremo a ricavare l'espressione del potenziale V e
della corrente I in ogni punto z della linea ad ogni istante t, assumendo che
l'origine della coordinata 2 sia situata in corrispondenza del carico su cui è chiusa
la linea. Per semplicità utilizzeremo inoltre la notazione complessa e supporremo
che tutte le grandezze abbiano una dipendenza temporale del tipo ejωt. Questo
significa che considereremo la linea alimentata da un generatore di forza
elettromotrice alternata di pulsazione ω.
FIG.
14.5 - Elementi in serie in un tratto dz di una linea di trasmissione.
Se con V rappresentiamo il potenziale e con I la corrente nel punto z del cavo
all'istante t, la variazione del potenziale passando dal punto z al punto z + dz,
come può dedursi dalla Fig. 14.5, è data da:
(14.22)
~
~
dove con R e L abbiamo indicato rispettivamente la resistenza e l'induttanza per
per unità di lunghezza del cavo o meglio la loro densità lineare e cioè la derivata
delle rispettive grandezze rispetto a z.
~
La quantità R dz è dunque la consueta resistenza ohmica di un tratto di
~
lunghezza dz dei conduttori che costituiscono il cavo ed L dz l'induttanza di un
tratto
14.3]
IL CAVO COASSIALE RAPPRESENTATO MEDIANTE ELEMENTI
193
dz dei due conduttori cilindrici coassiali. L'espressione (14.22) esprime così il fatto
che la variazione di potenziale dV lungo un tratto dz della linea è uguale alla
somma della caduta di potenziale per il passaggio della corrente I nella resistenza
~
R dz più la caduta di potenziale dovuta alla variazione della corrente nella
~
induttanza L dz.
La variazione di potenziale dV lungo un tratto infinitesimo dz del cavo per la
(14.22) è allora:
(14.23)
che eseguendo la derivata rispetto al tempo della corrente diviene:
(14.24)
Ponendo poi:
(14.25)
la (14.24) si scrive:
(14.26)
~
La quantità Z rappresenta così la densità lineare di impedenza della linea
coassiale.
FIG.
14.6 - Elementi in parallelo in un tratto dz di una linea di trasmissione.
La variazione di corrente dI tra un punto z e un punto z + dz del cavo, come si
deduce dalla Fig. 14.6, risulta essere:
(14.27)
~
dove G è la densità lineare di conduttanza del cavo, conseguenza diretta delle
perdite attraverso il dielettrico posto tra conduttore esterno e conduttore interno, e
~
C è la densità lineare di capacità dei due conduttori cilindrici coassiali. Il termine
~
C ∂V/∂t
194
ONDE ELETTROMAGNETICHE IN CAVI COASSIALI
[CAP. 14
contenuto nella (14.27) non è altro che la corrente che fluisce nel condensatore di
~
capacità C dz durante la sua carica.
Analogamente a quanto fatto in precedenza per la tensione V, la (14.27) può
essere trasformata nella:
(14.28)
~
Se con Y indichiamo la densità lineare di ammettenza del cavo, e cioè:
(14.29)
Deriviamo ora la (14.26) rispetto a z:
(14.30)
e combiniamo il risultato con la (14.28); otteniamo:
(14.31)
Procedendo in maniera identica con l'equazione (14.28) si trova che:
(14.32)
È immediato verificare che la (14.31) ammette, per quanto riguarda la
dipendenza spaziale, una soluzione del tipo:
(14.33)
~~
con γ = ZY . L'espressione completa per il potenziale, tenendo conto della
dipendenza temporale, è allora:
(14.34)
Per la corrente I vale l'analoga espressione:
(14.35)
Le costanti V1, V2, I1, ed I2 vanno determinate tenendo conto del carico su cui la
linea è chiusa e del generatore ad essa applicato.
Il potenziale e la corrente definiti dalle (14.34) e (14.35) sono quantità
complesse; le grandezze tìsicamente osservabili, secondo la convenzione da noi
fatta, si ottengono prendendo la parte reale di queste espressioni.
14.3]
IL CAVO COASSIALE RAPPRESENTATO MEDIANTE ELEMENTI
195
Seguendo un metodo del tutto diverso da quello illustrato nel paragrafo
precedente siamo così ugualmente arrivati a concludere che in ogni punto del cavo
ed ad ogni istante il potenziale e la corrente, e quindi ogni altra grandezza
elettromagnetica, risultano dati dalla somma di due termini che rappresentano
fisicamente due onde viaggianti in versi opposti.
Nelle (14.34) e (14.35) il primo termine a destra rappresenta un'onda viaggiante
in direzione opposta a z, diretta quindi dal generatore al carico, mentre il secondo
termine è un'onda viaggiante nella direzione concorde a z, e cioè dal carico al
generatore. Usualmente la prima onda viene chiamata onda incidente e la seconda
onda riflessa (1). Limitiamoci a considerare la sola onda incidente di tensione e di
corrente. Sostituendo Vt eyz e I1 eyz nelle (14.26) e (14.28) troviamo :
(14.36)
e
(14.37)
~
Dividendo la prima per γ e la seconda per Y e moltiplicando membro a membro
si ottiene:
(14.38)
~ ~
La quantità Z / Y , che riveste una notevole importanza nella teoria delle linee,
prende il nome di impedenza caratteristica della linea e normalmente viene indicata
~
~
con il simbolo Z0. Nel caso in cui si possa considerare R = 0 e G = 0, nel limite
cioè in cui il cavo risulti non dissipativo, l'impedenza caratteristica diviene :
(14.39)
In tal caso l'impedenza Z0 è una quantità puramente reale e dipende
esclusivamente dalle caratteristiche costruttive del cavo : geometria dei due
conduttori e permettività dielettrica dell'isolante impiegato. I cavi coassiali più
comunemente utilizzati presentano una impedenza caratteristica di 50, 60 e 75 ohm.
Si può dimostrare che se il carico su cui è chiusa la linea di trasmissione ha una
impedenza uguale all'impedenza caratteristica del cavo l'onda riflessa è nulla (2).
(1) Nel paragrafo precedente l'onda riflessa non era stata considerata poiché trattavamo il
caso di cavo infinitamente lungo.
(2) Per approfondire questi argomenti vedi per esempio il testo di H. M. Skilling: «Eletric
Transmission Lines», della McGraw-Hill Book Company Inc.
196
ONDE ELETTROMAGNETICHE IN CAVI COASSIALI
[CAP. 14
14.4 Guida d'onda rettangolare
Per guida d'onda si intende un tubo metallico cavo, di sezione rettangolare o
circolare, utilizzato per la trasmissione di onde elettromagnetiche, generalmente di
frequenza superiore ad 1 GHz (109 hertz).
Limitando la nostra attenzione ad una guida d'onda di sezione rettangolare, che
supponiamo delimitata da superficie metalliche con conducibilità elettrica infinita e
riempita con un mezzo di permittività dielettrica s e permettività magnetica n (in
particolare il vuoto o l'aria) ci proponiamo di determinare il comportamento dei
campi elettrici e magnetici che in essa propagano.
Sia data una guida d'onda rettangolare di larghezza a e di altezza b posta,
rispetto al sistema di coordinate cartesiane scelto, secondo quanto è mostrato in
Fig. 14.7.
FIG. 14.7
- Guida d'onda rettangolare.
Il primo problema da affrontare è quello di specificare l'andamento dei campi
dell'onda elettromagnetica che propaga nella guida. Questi, infatti, per la presenza
delle pareti metalliche e per la conseguente necessità di soddisfare le condizioni al
contorno, risultano alquanto più complicati di quelli di un'onda piana, come si
presentava nella propagazione libera, per esempio nel vuoto. Nell'ipotesi particolare
che le superficie metalliche della guida siano infinitamente conduttrici, come è
stato mostrato nel paragrafo 13.11 la componente di E tangente e la componente di
H normale alla superficie devono annullarsi. Assumiamo che per l'onda che si
propaga nella guida in direzione z il campo elettrico E sia parallelo all'asse x. Le
condizioni al contorno per E impongono che in ogni piano perpendicolare a z ed a
ogni istante t la componente Ex debba annullarsi per i valori y = 0 ed y = a.
Per quanto riguarda il campo magnetico H le cose sono alquanto più complicate.
Se considerassimo infatti un'onda piana, il vettore H sarebbe diretto parallelamente
all'asse y. Ma per le condizioni al contorno la componente di H normale alla
superficie metallica deve annullarsi per y = 0 e y = a, e d'altronde le linee di forza
di H devono essere linee chiuse. Per soddisfare contemporaneamente
14.4]
GUIDA D'ONDA RETTANGOLARE
197
queste due condizioni dobbiamo supporre che le linee di H, rimanendo in un piano
perpendicolare ad x, passino curvando dalla direzione y alla direzione z e si
richiudano su se stesse girando intorno alle linee di forza del vettore E dirette
parallelamente ad x (vedi Fig. 14.8). Risulta così, a differenza di quanto accade per
l'onda piana in propagazione libera, che per l'onda che si propaga nella guida esiste
una componente di H longitudinale e cioè parallela alla direzione di propagazione.
Un'onda caratterizzata da un andamento dei campi come quello ora descritto e per la
quale il campo elettrico giace tutto su un piano perpendicolare alla direzione di
propagazione prende il nome di onda trasversale elettrica.
FIG. 14.8 - Guida d'onda rettangolare.
a) Sezione trasversale. Linee di forza del campo elettrico (continue) e del campo magnetico
(tratteggiate) ;
b) Sezione longitudinale. Linee di forza del campo magnetico.
Si può dimostrare che nella guida si propagano anche delle onde per le quali il
vettore H è perpendicolare alla direzione di propagazione mentre il vettore E
presenta una componente longitudinale. Queste sono le cosiddette onde trasversali
magnetiche (1).
Per gli scopi che ci siamo proposti, e cioè di ricavare semplicemente le principali
caratteristiche dei campi elettrici e magnetici nella guida, ci limitiamo a considerare
il caso di un'onda trasversale elettrica con il campo elettrico diretto parallelamente
all'asse x. Assumeremo inoltre che la dipendenza spaziale e
(1) L'onda elettromagnetica completamente trasversale, con E ed H perpendicolari alla
direzione di propagazione, viene indicata in forma abbreviata con le lettere TEM (trasversale
elettrica magnetica); l'onda trasversale elettrica viene indicata con TE e quella trasversale
magnetica con TM.
198
ONDE ELETTROMAGNETICHE IN CAVI COASSIALI
[CAP. 14
temporale per tutte le componenti dei campi dell'onda elettromagnetica sia, come
per l'onda piana monocromatica, del tipo e (γz + jωt ) dove la quantità γ, che
rappresenta il coefficiente di propagazione dell'onda, deve essere determinato
imponendo che la soluzione soddisfi le equazioni di Maxwell.
Poiché per le condizioni al contorno la componente Ex deve annullarsi nei punti
y = 0 ed y = a, assumeremo per E una dipendenza dalla variabile y data da
sen
π
a
y . Si ha così che:
(14.40)
Dalle equazioni di Maxwell, tenendo conto che Ev = E2 = Hx = O, che all'interno
della guida p = O e J = 0 e ricordando inoltre le relazioni D = E E, B = y. H,
ricaviamo :
1) div D = 0
(14.41)
2) div B = 0
(14.42)
3)
(14.43)
(14.44)
(14.44)
4)
(14.45)
(14.46)
(14.47)
(14.47)
Facciamo notare che nel ricavare le equazioni ( 14.41)-(14.47)
è stata eseguita la derivazione rispetto alla variabile temporale. Dalla (14.43) e
(14.44)
14.4]
GUIDA D'ONDA RETTANGOLARE
199
mediante la (14.40) si trova che:
(14.48)
(14.49)
che esprimono, in funzione della componente Ex del campo elettrico, le due componenti non nulle del campo magnetico H. Sostituendo ora nella (14.45) le (14.40),
(14.48) e (14.49) dopo alcune semplificazioni si ha che:
(14.50)
Da questa relazione deduciamo che affinchè nella guida si abbia propagazione è
necessario che la quantità a destra entro parentesi sia negativa in modo che γ sia
una quantità immaginaria. Deve essere quindi:
(14.51)
e poiché la velocità di propagazione libera dell'onda è υ =
1
εμ
e inoltre ω = 2π v,
la disuguaglianza (14.51) diviene:
(14.52)
e cioè:
(14.53)
Possiamo pertanto concludere che l'onda propaga nella guida solo se γ =jβ, con β
reale, e questo si verifica solo se l'onda ha nel vuoto una lunghezza che è minore di
due volte la larghezza della guida. La lunghezza d'onda λc tale che :
(14.54)
prende il nome di lunghezza d'onda critica e rappresenta la massima lunghezza
d'onda che possa propagare in una guida di larghezza a.
15
Cenni sulla teoria della relatività ristretta
15.1 Relatività della meccanica galileiana
15.1.1 Il principio della relatività in meccanica. Sistemi inerziali
La meccanica è stata la prima branca della fisica che si è sviluppata in maniera
consistente soprattutto per opera di Galileo e di Newton. Essa si occupa del
comportamento dei corpi, e sostanzialmente del loro movimento, quando essi siano
sollecitati da azioni esterne. Le leggi della meccanica consistono pertanto in
relazioni fra le diverse grandezze, ad esempio velocità, accelerazione, energia,
momento angolare, ecc., che caratterizzano il comportamento dei corpi stessi.
Queste grandezze sono in generale funzione della posizione spaziale del corpo e del
tempo. Esse sono cioè funzioni del tipo: A= A(x, y, z; t). Ciò implica, per la
descrizione dei fenomeni meccanici, l'introduzione di un sistema di riferimento,
caratterizzato per esempio da una terna di assi cartesiani x, y, z, e l'impiego di un
misuratore (orologio) del tempo t. Una legge meccanica sarà pertanto una relazione
del tipo:
f (A, B, C, ...) = 0
(15.1)
fra le diverse grandezze A, B, C,.... considerate in un sistema di riferimento S, e
funzioni quindi delle variabili x, y, z; t.
Un problema importante è quello di stabilire come le relazioni (15.1) si
trasformino quando i fenomeni vengono descritti, anziché nel riferimento S, in un
altro riferimento S′ in movimento rispetto a S.
202
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Dette x', y', z', le coordinate di un punto qualsiasi rispetto a S' e t' il tempo
misurato in S' (lasciamo per ora impregiudicato se si dovrà assumere o no, t' = t),
avremo che il legame tra le coordinate di un punto nel riferimento S' e quelle del
medesimo punto nel riferimento S sarà espresso da certe relazioni:
(15.2a)
ovvero
(15.2b)
Le grandezze A, B, C,..., considerate nel sistema S', assumeranno pertanto delle
espressioni del tipo:
e, in generale, la legge espressa nel riferimento S dalla (15.1) sarà espressa nel
riferimento S' da una relazione del tipo:
È evidente, e si può del resto rendersene conto con considerazioni elementari,
che in generale, vale a dire se il moto di S' rispetto a S è un moto vario generico, si
ha:
Orbene, com'è stato illustrato da Galileo in alcune celebri pagine dei «Dialoghi
sui Massimi Sistemi» (Giornata II), riveste un interesse particolare la
considerazione di sistemi di riferimento dotati di moto rettilineo e uniforme l'uno
rispetto all'altro. Infatti in questo caso, partendo da osservazioni di carattere fisico,
Galileo ha introdotto, erigendolo a principio fondamentale della meccanica, il
seguente principio della relatività:
le leggi che governano i fenomeni meccanici in due sistemi di riferimento S e S',
dotati di moto rettilineo e uniforme l'uno rispetto all'altro, hanno la stessa forma.
Vale a dire se tali fenomeni sono descritti in S dalla relazione matematica
(15.1), in S' saranno descritti dalla relazione:
f(A', B', C. ...) = 0 ;
la f è la stessa nei due riferimenti.
15.1]
RELATIVITÀ DELLA MECCANICA GALILEIANA
203
Di particolare importanza fra le leggi della meccanica è quella espressa
dall'equazione fondamentale della dinamica:
m0 a = F
(15.3)
essendo m0 la massa del corpo, a la sua accelerazione e F la forza risultante agente
su di esso.
La (15.3) è stata stabilita da Newton e ritenuta valida in un sistema di
riferimento associato al Sole ed avente gli assi rigidamente collegati con le
cosiddette stelle fisse, con quelle stelle cioè che da secoli non presentano alcuna
modificazione sensibile nelle loro posizioni relative. Il sistema di riferimento a cui
stiamo alludendo è noto come sistema delle stelle fisse. Naturalmente, se si accetta
questa convenzione, nel sistema collegato con la Terra, evidentemente dotato di
moto accelerato rispetto a quello delle stelle fisse, la (15.3) non potrà più essere
scritta nella forma F' = m0 a' : è infatti noto che nel passaggio dal primo al secondo
sistema di riferimento, compaiono, come conseguenza del teorema di Coriolis, dei
nuovi termini (forze apparenti) dovuti al moto della Terra rispetto alle stelle fisse.
Pertanto, anche se in pratica tali termini sono molto piccoli per cui, almeno per i
problemi più comuni, si possono ritenere completamente trascurabili, è F' ≠ m0 a'.
In base però al principio di relatività galileiana l'equazione (15.3) si trasformerà
invece in una della stessa forma F' = m0 a', quando dal sistema S delle stelle fisse si
passa ad un altro sistema di riferimento in moto rettilineo uniforme rispetto ad esso.
Tutti i sistemi di riferimento costituiti dal sistema delle stelle fisse e da quelli in
moto rettilineo uniforme rispetto a questo, per i quali, come si è detto, vale
l'equazione fondamentale della dinamica nella forma (15.3), si sogliono chiamare
sistemi inerziali. Essi svolgono un ruolo fondamentale nello studio della meccanica,
per cui è importante definirli in base alle loro proprietà intrinseche. Assumeremo
che un sistema è inerziale se le relazioni spaziali in esso, quali risultano determinate
da regoli rigidi fermi nel riferimento, seguono la geometria euclidea e se in esso
esiste un tempo universale, per il quale una particella libera obbedisce al principio
di inerzia, vale a dire rimane ferma o continua a muoversi di moto rettilineo
uniforme.
In base a queste proprietà le particelle libere, poste in condizioni di riposo in
punti fissi del sistema di riferimento, ivi rimangono. Si può pertanto descrivere un
riferimento inerziale come un aggregato di particelle-campione libere e mutuamente
ferme, a distanze costanti misurate da regoli rigidi. Queste distanze soddisfano ai
teoremi della geometria euclidea. In un siffatto riferimento le linee rette sono delle
geodetiche e le particelle libere non appartenenti all'aggregato di definizione si
muoveranno in linea retta. Si potrà poi supporre che alle particelle campione
dell'aggregato-riferimento siano associati degli orologi che misurano l'istante di
passaggio delle particelle in moto. Con la locuzione tempo universale si vuoi
intendere che è possibile accordare e sincronizzare gli orologi associati alle diverse
particelle campione in modo che col tempo segnato da ognuno di essi le leggi della
meccanica risultino omogenee e isotrope (cioè ad esempio: proiettili identici sparati
da fucili identici in ogni punto e
204
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
lungo una qualunque direzione si muovono con la stessa velocità). Si può ritenere,
con buona approssimazione, che la scala dei tempi definita da vari processi che si
ripetono in modo identico, come ad esempio le vibrazioni di un atomo eccitato, si
mantenga sincronizzata col tempo inerziale.
Il sistema delle stelle fisse e quelli che si ottengono da questo con una
traslazione rettilinea ed uniforme soddisfano approssimativamente alle proprietà
che abbiamo enumerato per caratterizzare i sistemi inerziali. Inoltre, perché il
principio di inerzia sia valido in un sistema, occorre che ivi sia trascurabile la
gravita. Anche questa proprietà può essere realizzata approssimativamente in
regioni sufficientemente lontane da distribuzioni di masse. Osserviamo ancora, che
per una larga classe di fenomeni, anche il riferimento del nostro laboratorio,
sebbene in lenta rotazione rispetto al sistema delle stelle fisse e non esente da
gravita, può essere considerato come inerziale.
15.1.2 La trasformazione di Galileo
Come abbiamo detto, il principio di relatività di Galileo esige che le leggi della
meccanica mantengano la stessa forma quando si passi da un sistema di riferimento
a un altro dotato di moto rettilineo uniforme rispetto al primo. In particolare,come
conseguenza di ciò, si richiede che la legge di Newton F = m0 a conservi la sua
forma passando da un sistema inerziale ad un altro. È pertanto di fondamentale
importanza verificare se tale esigenza è effettivamente soddisfatta. Allo scopo è
necessario anzitutto stabilire le formule di trasformazione che permettono di
passare dalle coordinate x, y, z, t di S a quelle x', y', z', t' di S' in moto rispetto a S
con una velocità w costante; in altri termini si devono esplicitare le formule di
trasformazione (15.2) per il caso che ci interessa di una traslazione uniforme. Non è
possibile fare ciò senza introdurre alcune ipotesi relative alle proprietà dello spazio
e del tempo ed a quelle del movimento.
Nella fisica prerelativisttica le due principali ipotesi che si assumevano erano
essenzialmente le seguenti:
1a Ipotesi: «Esistenza di un tempo assoluto». — Abbiamo detto precedentemente
come sia possibile definire in ogni singolo sistema inerziale un tempo universale.
Nella fisica prerelativistica si suppone che sia possibile regolare gli orologi, che nei
vari sistemi inerziali misurano il tempo, in modo che il valore di questo sia lo
stesso in ogni sistema. Ad un tempo t di S può corrispondere, cioè, in S' un tempo
t' = t.
2a Ipotesi: «Reciprocità del moto». — Dati due sistemi S e S' in moto l'uno
rispetto l'altro, è equivalente dal punto di vista cinematico supporre il primo
«fermo» e S' in moto con velocità w, oppure il secondo «fermo» e il primo in moto
con velocità - w (1).
(1) Per punto di vista cinematico si vuol qui intendere che l'ipotesi assunta riguarda
unicamente la struttura delle formule di trasformazione per il passaggio dalle coordinate
(x, y, z; t) dì S a quelle (x', y', z'; t') di S' mentre non si fa assolutamente alcuna asserzione
sulla relazione che lega le leggi di un fenomeno osservato in S e quelle dello stesso
osservato in S'.
15.1]
RELATIVITÀ DELLA MECCANICA GALILEIANA
205
Questa ipotesi comporta che, se il passaggio da S a S' è retto dalla formula
necessariamente quello da S' a S dovrà essere retto dalla:
Si tratta quindi, sulla base delle due ipotesi assunte e tenendo presenti le
proprietà che caratterizzano i sistemi inerziali, di determinare il legame fra r e r',
ossia fra x, y, z e x', y', z'.
Allo scopo ricordiamo anzitutto che in ogni sistema inerziale deve valere il
principio di inerzia. Ciò comporta che, se un punto materiale non soggetto a forze si
muove di moto rettilineo uniforme rispetto a S, e cioè se si ha:
si deve avere un moto rettilineo uniforme anche in S', e cioè deve aversi (si ricordi
che è t' = t) :
Ciò è possibile, com'è noto, se x', y', z' sono funzioni lineari di x, y, z e t.
Convenendo poi di fissare l'origine dei tempi e l'origine degli assi nei due sistemi in
modo che per t = 0 si abbia : x = 0, y = 0, z = 0 e x' = 0, y' = 0, z' = 0, le relazioni
cercate dovranno essere omogenee, e quindi della forma:
(15.4)
e si tratterà di determinare i 12 coefficienti ahk.
Supponendo per semplicità di considerare una traslazione lungo l'asse x e di
prendere gli assi di S' coincidenti all'istante iniziale con quelli di S, dovremo avere :
Inoltre, essendo gli assi y e z trattati allo stesso modo (data l'isotropia dello
spazio), avremo:
indicando il valore comune di questi coefficienti (che eventualmente sarà una
funzione di w) con λ(w), la seconda e la terza delle (15.4) si ridurranno a:
(15.5)
206
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Ma, per l'ipotesi della reciprocità del moto, gli stessi risultati si dovranno avere
considerando S in moto con velocità - w rispetto a S'. Dovranno quindi valere anche
le relazioni:
che, confrontate con le precedenti, danno:
(15.6)
D'altra parte un'inversione del verso positivo di x e x' porta a sostituire - w a w,
senza però che nulla muti nei riguardi di y e z. Dovendo pertanto le equazioni che
in questo modo si ottengono, e cioè:
coincidere con le (15.5), si avrà:
onde dalla (15.6):
ossia:
Avendo però supposto gli assi y' e z' rispettivamente equiversi con y e z,
dovremo prendere senz'altro il segno +, per cui in definitiva avremo:
Osserviamo ora che, siccome i punti fermi rispetto a S' debbono, rispetto a S,
traslare con velocità w lungo il verso positivo dell'asse x, si deve avere che, quando
x' è costante, lo è anche x - wt; pertanto la prima delle (15.4) dovrà avere la forma:
Per l'ipotesi della reciprocità del moto, dovrà allora valere anche la:
.
La compatibilita di queste due equazioni richiede che sia:
15.1]
RELATIVITÀ DELLA MECCANICA GALILEIANA
207
Le formule di trasformazione cercate sono pertanto le seguenti:
(15.7)
Da esse si deducono quelle inverse :
(15.8)
Esse sono note come trasformazioni di Galileo o galileiane.
Di queste formule vogliamo ricordare due conseguenze importanti. La prima
riguarda la misura della lunghezza di uno stesso segmento eseguita nei due sistemi
S e S'.
Detti A e B gli estremi del segmento, in S si avrà per detta lunghezza:
In S' avremo invece:
ora, in virtù delle (15.7), si ha:
onde:
Tale lunghezza è cioè invariante, risultando sempre la stessa in tutti i riferimenti
in moto rettilineo ed uniforme l'uno rispetto all'altro.
L'invarianza di una lunghezza risulta pertanto una conseguenza delle due ipotesi
assunte per dedurre la trasformazione di Galileo. È immediato verificare che questa
trasformazione potrebbe anche dedursi assumendo, accanto all'ipotesi dell'esistenza
di un tempo assoluto (t = t') l'ipotesi dell'invarianza della lunghezza di un segmento
(l = l'). In questo caso la reciprocità del moto risulterebbe una conseguenza delle
due ipotesi assunte (t = t', l = l').
La seconda conseguenza delle trasformazioni di Galileo concerne il cosiddetto
teorema di composizione delle velocità, che si ricava immediatamente derivando le
(15.7) rispetto al tempo:
(15.9a)
o anche, in notazioni vettoriali,
(15.9b)
208
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
dove si è posto per definizione:
È questo il teorema di composizione delle velocità della meccanica newtoniana.
15.1.3 Invarianza delle leggi di Newton rispetto ad una trasformazione galileiana
Ammesso che le formule di passaggio da un riferimento inerziale S ad un altro
pure inerziale S' siano date da una trasformazione di Galileo, è possibile verificare
se la equazione fondamentale della dinamica soddisfi o no il principio di relatività
galileiana.
Per precisare il problema supponiamo che il sistema in considerazione sia
costituito da un insieme di masse puntiformi : su ogni coppia di queste si eserciti
una forza, derivabile da un potenziale V, la cui direzione coincida con la
congiungente i due punti materiali e la cui intensità sia funzione solo della loro
distanza. Avremo allora per un insieme di n punti:
La forza agente sull'i-esimo punto materiale sarà data da :
(15.10)
La forma di queste equazioni comporta che le componenti della forza dovuta
all'azione dell'i-esimo sul k-esimo punto materiale e quelle della forza dovuta
all'azione del k-esimo sull'i-esimo punto materiale siano eguali e di segno
15.1]
RELATIVITÀ DELLA MECCANICA GALILEIANA
209
opposto, cioè:
per cui la somma di tutte le forze agenti su tutti gli n punti materiali è nulla:
Le equazioni differenziali di Newton per il sistema sono:
(15.11)
dove m0 è la massa dell'i-esimo punto materiale.
Passando da S a S' con la trasformazione (15.8) osserviamo che le grandezze
xi - xk e rìk rimangono, per quanto abbiamo mostrato alla fine del paragrafo
precedente, invariate. Lo stesso avverrà quindi anche per la grandezza V la quale,
espressa in funzione delle nuove coordinate, conserva la stessa forma e assume gli
stessi valori che nel primitivo sistema di riferimento.
Avendosi poi:
i secondi membri delle equazioni (15.11) risulteranno invariati rispetto alla
trasformazione di Galileo (15.7).
Si verifica poi facilmente che anche i primi membri delle (15.11), per effetto
della relazione t = t', rimangono invariati per una trasformazione galileiana.
Possiamo pertanto concludere che le equazioni fondamentali della dinamica
mantengono non solo la stessa forma, ma addirittura rimangono invariate passando
dal riferimento S a quello S' per mezzo di una trasformazione galileiana. Esse sono
cioè invarianti rispetto ad una siffatta trasformazione. Si noti che questa proprietà
da esse posseduta è più stringente di quella richiesta dal principio di relatività
galileiana; questo infatti richiede che dette equazioni si trasformino in altre della
stessa forma senza che i singoli termini mantengano il loro valore: in altre parole il
principio di relatività richiede solo che le equazioni della meccanica siano
covarianti rispetto ad una trasformazione galileiana.
Si osservi inoltre che, come deriva immediatamente dalla loro forma vettoriale e
dell'essere le m0i degli invarianti, le equazioni della meccanica newtoniana sono
covarianti anche rispetto a una rotazione degli assi, ossia rispetto a una
trasformazione che lasci invariata l'espressione:
210
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Questa proprietà analitica delle equazioni di Newton traduce l'isotropia e
l'omogeneità dello spazio sede dei fenomeni fisici.
Vogliamo osservare che anche le altre branche della meccanica, come la
trattazione della materia continua (elasticità, idrodinamica, ecc.) o la meccanica dei
corpi rigidi, si possono dedurre dalla meccanica dei punti materiali introducendo
opportune interazioni del tipo (15.10) e operando certi passaggi al limite. È
evidente, anche senza un esame particolareggiato, che i risultati precedenti, ottenuti
applicando una trasformazione galileiana a un sistema di punti materiali, si
estendono anche a queste branche della meccanica.
Osserviamo infine che, in questo paragrafo, si è supposto che le forze siano di
tipo posizionale, cioè dipendenti dalle sole coordinate di posizione. Se esse, pur
essendo derivabili da un potenziale, dipendono anche dalla velocità, (come per
esempio le forze di Lorentz, che un campo magnetico B esercita su una massa
puntiforme, carica elettricamente e in moto con velocità v, e cioè, F = e v × B), non
vale più la proprietà di invarianza (o di semplice covarianza) richiesta dal principio
di relatività galileiana. La ragione di ciò, nella fisica prerelativistica, veniva
attribuita al fatto che tali forze descrivono delle proprietà elettromagnetiche, e le
leggi nell'elettromagnetismo, come diremo particolareggiatamente nel prossimo
paragrafo, si ritenevano valide non in tutti i sistemi inerziali ma solo in un
particolare sistema di riferimento collegato ad un ipotetico mezzo, riempiente tutto
lo spazio, denominato etere. In altri termini, nella fisica prerelativistica il principio
di relatività si riteneva applicabile ai soli fenomeni meccanici.
Vedremo come la teoria della relatività abbia modificato, e in modo essenziale,
il punto di vista della fisica prerelativistica mostrando l'inconsistenza di tale ipotesi
dell'etere ed estendendo il principio di relatività anche ai fenomeni elettromagnetici.
15.2 I fenomeni elettromagnetici e l'ipotesi dell'etere
15.2.1 Apparente dipendenza delle equazioni di Maxwell dal sistema di riferimento
Le leggi dei fenomeni elettromagnetici sono notoriamente compendiate dalle
equazioni di Maxwell:
(15.12)
dove rispettivamente E e H denotano il campo elettrico ed il campo magnetico, D e
B i vettori induzione elettrica e magnetica, ε e μ. la costante dielettrica e la
permeabilità magnetica, ρ e J la densità di carica e di corrente elettrica.
15.2]
I FENOMENI ELETTROMAGNETICI E L'IPOTESI DELL'ETERE
211
Secondo la concezione maxwelliana le equazioni del campo elettromagnetico si
devono intendere riferite ad un qualsiasi sistema di riferimento immobile rispetto
all'etere, considerato questo come la sede di tutti i fenomeni elettromagnetici. Quale
conseguenza di questa concezione, veniva a porsi il problema di trovare le
equazioni dell'elettromagnetismo valide in un sistema di riferimento in moto
rispetto all'etere, problema che evidentemente implicava la necessità di fissare il
modo di comportarsi dell'etere rispetto ai corpi in moto entro di esso. La questione è
analoga a quella che abbiamo visto presentarsi nello studio dei fenomeni meccanici,
quando si faccia corrispondere al sistema assoluto (o delle stelle fisse) della
meccanica, quello dell'elettromagnetismo (cioè l'etere). In un punto importante però
le equazioni di Newton differiscono da quelle di Maxwell: mentre infatti le prime
sono, come abbiamo visto, invarianti rispetto ad una trasformazione galileiana, le
seconde non lo sono affatto.
Ciò ha come conseguenza che le equazioni del campo elettromagnetico
assumono forma diversa in dipendenza del movimento (anche rettilineo ed
uniforme) rispetto all'etere del sistema di riferimento entro il quale si osservano i
fenomeni elettromagnetici. Si arriva così alla conclusione che dovrebbe essere
possibile istituire delle esperienze atte a mettere in luce, dall'osservazione di
fenomeni elettromagnetici che su di esso si svolgano, il moto di un corpo (o di un
mezzo) rispetto all'etere.
Terminiamo questo argomento ricordando un'importante scoperta fatta da
Lorentz nel 1904, relativa ad una singolare proprietà di cui godono le equazioni di
Maxwell e sulla quale avremo occasione di ritornare diffusamente in seguito : tali
equazioni, anziché di fronte alla trasformazione galileiana espressa dalla (15.7)
risultano covarianti (nel senso che conservano la stessa forma) rispetto alla seguente
trasformazione:
(15.13)
che si dice appunto trasformazione di Lorentz.
Si noti che, a differenza delle trasformazioni galileiane, quelle lorentziane
richiedono, nel passaggio da un sistema di riferimento ad un altro in moto rispetto
al primo, un cambiamento anche nella variabile temporale; a questo proposito anzi
è notevole il fatto che il legame tra t e t' inveiva anche le variabili di posizione. E
infine interessante osservare che la trasformazione lorentziana (15.13) si riduce alla
corrispondente trasformazione galileiana (15.7) per β = 0, cioè per c = ∞.
15.2.2 L'esperimento di Michelson
Come già abbiamo avuto occasione di dire, la non invarianza delle equazioni di
Maxwell rispetto ad una trasformazione galileiana induce a ritenere che sia
possibile mettere sperimentalmente in risalto il movimento di un corpo (o mezzo),
entro il quale si eseguono delle esperienze relative a fenomeni elettromagnetici,
rispetto al sistema di riferimento assoluto (etere).
212
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Per raggiungere tale scopo si può per esempio pensare di ricercare, istituendo
opportune esperienze di ottica, come la velocità della luce misurata da un
osservatore terrestre vari a seconda della direzione in cui essa si propaga:
l'interpretazione dei fenomeni fisici fornitaci dalla fisica prerelativistica, che
comporta fra l'altro l'ammissione dell'esatta validità del teorema della composizione
delle velocità espresso dalla formula (15.9b), porterebbe a ritenere che la velocità
della luce misurata dall'osservatore terrestre debba risultare massima quando la luce
si propaga nella stessa direzione ma in verso contrario a quello del moto della Terra
e minima nel caso opposto. La più celebre esperienza a questo riguardo è quella
eseguita per la prima volta da Michelson nel 1879 e ripetuta successivamente da lui
e da altri sperimentatori (tra cui notevoli le misure di Kennedy) con sempre
maggiore precisione ed in diverse condizioni sperimentali. Ne daremo una
descrizione schematica.
Un raggio luminoso (Fig. 15.1) SO incide su di una lastra semiargentata s sotto
un angolo di 45° : esso si scinde in due raggi OA e OB, che vengono riflessi su se
stessi da due specchi s' e s" e rinviati sulla lastra s, dove ciascuno di essi si scinde
ancora in altri due raggi. Consideriamo i due raggi sovrapposti che escono in
direzione OC, i quali hanno percorso rispettivamente i cammini SOAOC e SOBOC.
In C si osserveranno fenomeni di interferenza che dipenderanno dalla differenza di
fase dei due raggi provocata dalla differenza di tempo impiegata dalla luce a
percorrere i due tratti OAO e OBO.
FIG.
15.1 - Interferometro di Michelson.
Supponiamo ora che la Terra si muova rispetto al sistema di riferimento assoluto
(cioè l'etere) e sia w la velocità di tale movimento. Orientando per ragioni di
semplicità il braccio SA dell'interferometro lungo la direzione del vettore w, la
velocità con cui la luce si muove lungo il tratto OA dell'apparecchio è per un
osservatore terrestre (ritenendo valido il teorema (15.9b) di composizione delle
velocità) eguale a c - w, mentre la velocità con cui la luce percorre il tratto AO sarà
c + w. Di conseguenza il tempo τ1 impiegato a percorrere il tratto OA+AO, posto
OA = ll, sarà:
15.2]
I FENOMENI ELETTROMAGNETICI E L'IPOTESI DELL'ETERE
213
dove si è posto al solito β = w/c. Essendo β in pratica molto piccolo (dell'ordine di
10-4) potremo sviluppare τ1 in serie di potenze di β e ritenere trascurabili le potenze
di β superiori alla seconda; onde:
Per il calcolo del tempo τ2 impiegato dal secondo raggio a percorrere il
cammino OB + BO, occorre anzitutto tener presente qual'è il cammino effettivo che
detto raggio percorre (Fig. 15.2).
FIG.
15.2 - Illustrazione dell'esperienza di Michelson.
Sia O' la posizione del punto O di Fig. 15.1 all'istante di partenza e sia O" la sua
posizione al tempo τ2 quando il raggio riflesso da s" incontra di nuovo la lastra s.
Il segmento O' O" è allora uguale a w τ2 Il cammino completo, effettivamente
percorso dal raggio, è dunque:
Questo cammino si può ritenere eguale a cτ2, in quanto è percorso dalla luce in
direzione praticamente perpendicolare a quella del movimento della Terra.
Si ha perciò:
La differenza di tempo, che determina lo stato di interferenza in C, risulta
pertanto :
Se ora si ruota tutto l'apparecchio di 90° attorno a O, la posizione reciproca dei
cammini l1 e l2 rispetto all'etere viene ad essere scambiata e di conseguenza
214
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
si avrà per il tempo di ritardo:
Ne deriva che, con la rotazione dell'apparecchio, si dovrebbe osservare uno
spostamento delle frange corrispondente ad un ritardo:
dalla misura di questo spostamento sarebbe possibile dedurre β e quindi w.
L'esperienza, eseguita ripetutamente con estrema precisione e in diverse ore del
giorno e della notte (quindi con diversi orientamenti del piano dell'apparecchio
rispetto alle stelle fisse) e in tutte le epoche dell'anno, ha sempre dato per risultato
w = 0 entro i limiti dell'errore sperimentale (che in certi casi non superavano i 0,3
km/s). E, fatto estremamente interessante, un uguale risultato ha pure dato
l'esperienza di Michelson eseguita con luce solare, cioè con una sorgente in moto
relativo rispetto all'osservatore. Che la velocità della luce non dipenda dal moto
della sorgente è dimostrato anche dalle osservazioni di De Sitter sulle stelle doppie
e da altri esperimenti. Il risultato dell'esperienza di Michelson ha trovato una
conferma indiretta in varie altre esperienze (Trouton e Noble, Des Coudres,
Trouton e Rankine, ecc.) relative a fenomeni elettromagnetici, i quali, secondo le
concezioni preeinsteiniane, avrebbero pure dovuto venir influenzati da un eventuale
moto della Terra rispetto all'etere: anche tutte queste esperienze hanno invece dato
risultato negativo.
Dall'esito dell'esperienza di Michelson e delle altre ora menzionate, sembrerebbe
naturale di dover trarre la seguente conclusione: la Terra è ferma rispetto al sistema
assoluto dei fenomeni elettromagnetici, cioè rispetto all'etere; dal punto di vista
cinematico ciò equivale a dire che detto sistema assoluto coincide con un sistema di
riferimento fisso rispetto alla Terra. Ma accettando questa conclusione deriverebbe
un'inaspettata posizione di privilegio per la Terra, tale da far pensare addirittura ad
una specie di ritorno al sorpassato geocentrismo tolemaico. Per di più
all'accettazione di una siffatta conclusione, che pur sembrerebbe una immediata
conseguenza del risultato negativo dell'esperienza di Michelson, si oppongono i
risultati di altre esperienze, qualcuna delle quali discuteremo brevemente nel
paragrafo seguente.
15.2.3
Difficoltà della fisica prerelativistica
Come abbiamo detto, dal risultato dell'esperienza di Michelson sembra derivare
in maniera immediata e senza possibilità di dubbio che il sistema assoluto, rispetto
al quale si ritengono riferite le equazioni di Maxwell, coincida con un sistema
collegato alla Terra. Vogliamo ora mostrare come questo risultato, oltre che del
tutto inaspettato e sorprendente, è difficilmente conciliabile coi risultati di altre
esperienze. Ci limiteremo qui alla discussione di due fenomeni:
15.2]
I FENOMENI ELETTROMAGNETICI E L'IPOTESI DELL'ETERE
215
l'aberrazione astronomica annua e la propagazione della luce in un mezzo materiale
in movimento.
Aberrazione astronomica annua. Il fenomeno fu scoperto da Bradley nel 1727 e
consiste nel fatto che le stelle, nel corso di un anno, descrivono, in apparenza, una
piccola ellisse sulla volta celeste.
Una spiegazione accurata di questo fenomeno richiederebbe lo studio
particolareggiato delle onde nelle lenti e nei prismi degli strumenti di osservazione;
ma, se si concepiscono i raggi luminosi come la traiettoria dell'energia delle onde
luminose, ci si può attenere alla spiegazione più semplice e intuitiva fornita dalla
teoria dell'emissione e che porta ai medesimi risultati.
FIG.
15.3 - Aberrazione della luce stellare.
Detta (Fig. 15.3) cu (u è un vettore unitario nella direzione Stella-Terra) la
velocità della luce rispetto al sistema assoluto e w0 quella della Terra, sempre
rispetto a detto sistema, la velocità della luce relativa a un osservatore terrestre per
il teorema galileiano dei moti relativi sarà rappresentata dal vettore:
La luce risulterà quindi all'osservatore terrestre come provenienete lungo la
direzione u'. Pertanto se si indica con ϕ l'angolo formato dai due vettori w0 e u e
con ψ0 quello compreso fra i due vettori u e u', applicando il teorema dei seni al
triangolo TAB si trova:
(15.14a)
essendo poi
una quantità assai piccola, la relazione precedente
si può scrivere con buona approssimazione:
(15.14b)
216
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Per il moto di rivoluzione della Terra, il vettore w0, se diverso da zero, ruoterà in
un anno di un angolo di 360°. Ne segue che la visuale TS' volta dalla Terra alla stella
subisce una variazione periodica, descrivendo in un anno un cono ellittico col
vertice nell'occhio dell'osservatore.
Per poter eseguire un confronto quantitativo fra la (15.14b) ed i risultati
sperimentali prendiamo in considerazione, per semplificare le cose, una stella
circumpolare, per la quale ϕ = 90°.
Facendo due osservazioni della stella a sei mesi di distanza, avremo (Fig. 15.4)
che la prima volta essa apparirà nella direzione TS', e la seconda lungo TS", cioè
lungo la direzione simmetrica di TS' rispetto alla verticale TN: l'angolo compreso fra
le due visuali della stella, che è il dato fornito direttamente dall'esperienza, risulta
essere di 41".
FIG.
15.4 - Aberrazione della luce di una stella circumpolare.
Orbene se, in accordo alla conclusione che sembrava doversi dedurre
dall'esperienza di Michelson, si assumesse il sistema assoluto fisso con la Terra,
avremmo w0 = 0 e quindi ψ0 = 0, e cioè assenza assoluta del fenomeno
dell'aberrazione, in contraddizione con i risultati sperimentali. Questi si spiegano
invece nella maniera più semplice supponendo il sistema assoluto fisso rispetto al
Sole; infatti in questo caso w0 rappresenta la velocità della Terra rispetto al Sole, la
quale, com'è noto dall'esperienza, è uguale a 3 ⋅ 106 cm/s, onde:
L'angolo di aberrazione di una stella circumpolare risulterà quindi:
in perfetto accordo con i risultati sperimentali.
Esperienza di Fizeau. Un'altra esperienza interessante, per mettere in rilievo le
difficoltà cui si va incontro nel tentativo di stabilire quale sia il sistema assoluto cui
si debbono ritenere riferite le equazioni di Maxwell, è quella eseguita nel. 1851 per
opera di Fizeau. Nella nostra descrizione sommaria ci riferiremo alla disposizione
escogitata da Zeemann (Fig. 15.5).
15.2]
FIG.
I FENOMENI ELETTROMAGNETICI E L'IPOTESI DELL'ETERE
217
15.5 - Esperimento di Fizeau
Entro due tubi disposti parallelamente si fa scorrere dell'acqua in direzioni
opposte, ma con la stessa velocità w. Un raggio «a» di luce monocromatica incontra
una lastra semiargentata L, la quale scinde il raggio in due; uno di questi passa per
trasparenza e l'altro viene riflesso. Questi due raggi poi si riflettono rispettivamente
sugli specchi M1 e M2 e vengono inviati nei due tubi entro cui scorre l'acqua, per poi
penetrare nel prisma a riflessione totale P che ne scambia i cammini; mediante gli
specchi Ml e M2 e la lastra L, i due raggi sono nuovamente riuniti ed entrano nel
cannocchiale C, attraverso il quale si possono osservare le frange di interferenza. Si
noti che i due raggi compiono esattamente lo stesso cammino, ma entro i due tubi un
raggio si muove secondo la corrente dell'acqua e l'altro nel senso contrario. Il fatto
che, quando l'acqua nei due tubi è in moto, si osservino delle frange parrebbe
dimostrare che la velocità della luce rispetto ad un riferimento terrestre è diversa nei
due tubi in cui l'acqua si muove in sensi opposti, come se cioè il sistema assoluto
(etere) fosse trascinato dall'acqua in moto. Ammettendo anzi un trascinamento
completo (1) e accettando al solito la validità del teorema galileiano della
composizione delle velocità, deriva che la velocità della luce rispetto al riferimento
terrestre è nei due tubi rispettivamente V - w e V + w, denotando con V la velocità
c
della luce nell'acqua (se n è l'indice di rifrazione, è V = ). Di conseguenza il primo
n
raggio impiegherà ad attraversare i due tubi, di lunghezza comune l, il tempo:
ed il secondo:
La differenza dei tempi impiegati dai due raggi è pertanto:
(1) L'ipotesi di un trascinamento completo dell'etere da parte di un corpo in moto è
suggerita dal fatto che, mediante essa, immediatamente si spiega il risultato negativo
dell'esperienza di Michelson. Si viene così ad ammettere che il sistema cui sono riferite le
equazioni dell'elettromagnetismo è sempre solidale col corpo (o mezzo) nel quale il campo
elettromagnetico si propaga.
218
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Si può rilevare e misurare questa differenza mediante lo spostamento che
subiscono le frange di interferenza rispetto alla posizione che esse hanno quando
l'acqua è immobile.
L'esperienza dimostra però in modo indubbio che lo spostamento che si osserva
non corrisponde affatto alla formula ora trovata, ma le cose vanno, almeno con buona
approssimazione, come se la velocità del mezzo fosse ridotta da w a:
Ciò farebbe supporre che, almeno in questo fenomeno, anziché totalmente, l'etere
sia solo parzialmente trascinato con un coefficiente di trascinamento k = 1 - 1/n2.
Questo risultato sembra però inconciliabile col risultato dell'esperienza di Michelson
la cui spiegazione, come abbiamo detto precedentemente, parrebbe richiedere
l'ipotesi di un trascinamento totale dell'etere.
15.3
15.3.1
I principi della relatività ristretta
Il principio della relatività secondo Einstein
Dal complesso dei fatti sperimentali dianzi ricordati, discende come questi
appaiono in contraddizione fra di loro quando si tenti di interpretarli alla luce della
concezione fisica preeinsteiniana, basata sull'idea dell'esistenza di un riferimento
(etere) sede dei fenomeni elettromagnetici e sull'accettazione delle leggi galileiane
per il passaggio da un sistema di riferimento a un altro, animato rispetto al primo di
moto rettilineo uniforme, leggi che tra l'altro comportano l'esistenza di un tempo
assoluto invariabile col moto dell'osservatore.
In un primo tempo si tentò di superare queste difficoltà attribuendo all'etere
proprietà sempre diverse, ma, a parte l'artificiosità di siffatti tentativi che da un punto
di vista concettuale erano difficilmente accettabili, per tale via non fu possibile
arrivare ad una teoria che rendesse conto esattamente, partendo da un gruppo di
ipotesi coerenti, di tutti i fenomeni osservati.
Da un punto di vista concettuale si può anche osservare che il diverso
comportamento dei fenomeni meccanici da quelli elettromagnetici, rispetto al
passaggio da un sistema inerziale ad un altro, appare contrario allo spirito unitario
che sembra reggere tutti i fenomeni fisici; ciò soprattutto se si pensa che è difficile
immaginare un esperimento che riguardi la dinamica newtoniana, nel quale non
abbiano un ruolo essenziale anche fenomeni elettromagnetici (come ad esempio
procedimenti ottici di osservazione, ecc.).
La situazione era a questo punto quando nel 1905 comparve una celebre memoria
di Albert Einstein, nella quale si sosteneva che per superare tutte le difficoltà era
necessario sottoporre anzitutto ad una critica rigorosa gli stessi concetti e postulati
sperimentali su cui era costruita l'intera fisica e dai quali in particolare si deducevano
le leggi di trasformazione galileiane.
Anzitutto Einstein, basandosi sul fatto che tutti i tentativi di scoprire il riferimento
associato all'etere non avevano ottenuto alcun risultato e che anche
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
219
i fenomeni elettromagnetici si dimostravano insensibili a un moto rettilineo ed
uniforme del sistema di riferimento nel quale venivano descritti, pensò di estendere il
principio galileiano di relatività, valido per i fenomeni meccanici, a tutti i fenomeni
fisici.
Egli enunciò pertanto il seguente principio della relatività (ristretta): «Un sistema
di riferimento in moto traslatorio uniforme rispetto ad un sistema inerziale non può
essere da questo distinto per mezzo di un qualsiasi esperimento fisico».
Ciò equivale a dire che, se S è un sistema inerziale e S' è un sistema dotato di
moto rettilineo uniforme rispetto a S, anche S' è inerziale. Il principio di relatività di
Einstein può pertanto essere enunciato anche nella seguente forma : tutti i sistemi di
riferimento inerziali sono equivalenti per la formulazione di tutte le leggi fisiche.
Come si vede il principio di relatività di Einstein non è altro che un'estensione del
principio di Galileo dalla meccanica all'intera fisica.
Una conseguenza immediata del principio di Einstein è l'abolizione del concetto
di etere. Infatti, anche se l'etere esistesse, in virtù del principio della relatività
einsteiniana non sarebbe possibile in alcun modo mettere in rilievo il moto rispetto ad
esso degli altri sistemi inerziali : ciò fisicamente equivale ad ammettere che l'etere
non esista del tutto.
Si osservi che i sistemi inerziali a cui si fa riferimento nell'enunciazione del
principio einsteiniano della relatività ristretta vanno intesi come definiti in base alle
loro proprietà intrinseche (come si è detto al paragrafo 15.2.1) e non in relazione al
moto rispetto al sistema delle stelle fisse.
Vogliamo infine sottolineare che il principio di relatività einsteiniana riguarda
tutta la fisica e non solo la meccanica e l'elettromagnetismo. Così, ad esempio, anche
i campi delle forze nucleari, che non sono riducibili a campi elettromagnetici,
debbono soddisfare al suddetto principio.
15.3.2
Critica della trasformazione di Galileo
Il principio della relatività einsteiniana esige che le leggi dell'elettromagnetismo
conservino la stessa forma, passando da un sistema inerziale S ad un altro S'. D'altra
parte, se per tali leggi si assumono le equazioni di Maxwell e per formule di
trasformazione quelle di Galileo, sappiamo che tale esigenza non è verificata ; è stato
appunto per questa circostanza che si era formulata l'ipotesi dell'etere con il
conseguente problema di determinare il sistema di riferimento ad esso associato.
È chiaro che si potrà uscire da questo apparente circolo chiuso solo supponendo
che o le equazioni di Maxwell o le formule di Galileo siano insoddisfacenti e
sostituendole con altre tali da soddisfare al principio di relatività. D'altra parte
l'accuratezza con cui le equazioni di Maxwell hanno potuto essere verificate
escludono l'utilità di una loro modifica. Perciò Einstein rivolse la sua indagine critica
alle formule di trasformazione di Galileo e alle ipotesi sulle quali queste erano
fondate: quella della reciprocità del moto e quella dell'esistenza di un tempo assoluto.
220
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Partendo da questa critica Einstein arrivò alla conclusione che era proprio la
seconda di dette ipotesi, cioè quella della esistenza di un tempo assoluto, che doveva
essere abbandonata.
Per definire un tempo universale comune a tutti i sistemi inerziali, com'è stato
supposto per la deduzione delle formule di trasformazione gaMleiane, è necessario
definire cosa si intende per simultaneità. Nella fisica prerelativistica si supponeva che
l'affermazione «due eventi
si verificano simultaneamente» avesse significato
indipendentemente dal sistema di riferimento. Naturalmente, perché sia effettivamente
così, deve essere possibile escogitare un esperimento capace di provare se due eventi
sono simultanei. Ed in realtà, se i due eventi si verificano nello stesso posto dello
spazio, si può ad esempio ricorrere ad un sistema di contatori in coincidenza, come si
fa nello studio dei raggi cosmici: infatti un dispositivo di questo tipo scatta solo se i
due eventi si verificano simultaneamente.
Se i due eventi hanno invece luogo in due posizioni diverse dello spazio, il
dispositivo precedente non serve più. In questo caso occorre inviare, da ciascuno dei
due punti ove si sono verificati gli eventi, un segnale ad un dispositivo di coincidenza.
Se esistesse la possibilità di trasmettere segnali istantaneamente, cioè con velocità
infinita, ciò non introdurrebbe nessuna complicazione. Purtroppo però non si
conoscono segnali con questa proprietà, perché tutti i segnali che si possono
effettivamente realizzare si trasmettono con una velocità finità, per cui essi richiedono
un tempo finito per andare da un punto ad un altro. In questo caso nella definizione di
simultaneità entra in gioco il modo di propagarsi dei segnali usati: è ovvio che
converrà scegliere un tipo di segnale la cui velocità di trasmissione dipenda dal minor
numero di parametri possibili. A questo riguardo i più adatti sembrano i segnali
elettromagnetici (in particolare quelli luminosi), perché la loro trasmissione non
richiede la presenza di alcun mezzo materiale e perché la loro velocità nello spazio
vuoto non sembra dipendere nè dalla direzione di propagazione, nè dalla lunghezza
d'onda, nè dall'intensità della radiazione usata.
È per questa ragione che nella fisica, com'è stato soprattutto mostrato dalla teoria
einsteiniana della relatività, il fenomeno della propagazione della luce riveste una
importanza fondamentale. Prima perciò di esporre come sia possibile dare una
definizione della simultaneità di due eventi, che hanno luogo in punti diversi dello
spazio, premetteremo qualche osservazione sul fenomeno della propagazione della
luce.
15.3.3
Considerazioni sulla propagazione della luce
Nell'originaria interpretazione della teoria di Maxwell, la luce era descritta come
una perturbazione ondosa che si propagava in seno all'etere, immaginato come un
mezzo statico e permeante tutti i corpi.
In questa descrizione alcune delle caratteristiche principali della propagazione
ondosa trovavano una spiegazione immediata. Non così invece altre caratteristiche.
In particolare abbiamo a suo tempo insistito sulle contraddizioni cui portavano
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
221
i diversi esperimenti escogitati allo scopo di mettere in evidenza il moto di
riferimenti (ad esempio la Terra) rispetto all'etere. Come risultato di tali esperimenti,
sembrava impossibile mettere in evidenza una dipendenza della velocità di
propagazione della luce non solo dalla sorgente, ma anche dal sistema di riferimento
(inerziale) in cui il fenomeno veniva osservato.
Sulla base degli stessi esperimenti, Einstein formulò per la propagazione della luce
la seguente ipotesi (detta della costanza della velocità della luce):
I segnali luminosi nel vuoto si propagano rettilineamente, con la stessa velocità
costante c ad ogni istante, in tutte le direzioni, in tutti i sistemi inerziali. Dalle misure
più recenti si ha che c = 2,997930 ⋅1010 cm/s.
Come abbiamo detto, questa asserzione è un'ipotesi e non una proprietà deducibile,
almeno in modo semplice, da una teoria ondulatoria o corpuscolare. Essa, come
vedremo, verrà assunta come uno dei postulati da cui dedurre le formule di
trasformazione da sostituire a quelle galileiane. Sebbene, a prima vista, possa anche
sembrare contraria al modello intuitivo che siamo soliti farci del fenomeno della
propagazione della luce per la descrizione dei fenomeni ordinari della vita quotidiana,
tuttavia essa ci riuscirà comprensibile non appena ci saremo familiarizzati col pensiero
relativistico e, in modo particolare, coi concetti di spazio e di tempo quali derivano
dalla revisione critica di Einstein.
L'ipotesi della costanza della velocità della luce comporta in particolare che detta
velocità sia indipendente dal movimento della sorgente luminosa. Ciò risultava, come
abbiamo già accennato, dal fatto che l'esperienza di Michel-son aveva dato lo stesso
risultato sia usando luce proveniente da una sorgente terrestre sia luce solare. È stato
anche (1963) possibile provare questa assunzione con un apposito esperimento
terrestre (Alvàger, Nilsson e Kjellman). Il principio sul quale l'esperimento è basato è
il seguente. Un nucleo di carbonio 12 (C12) colpito da una particella a dà luogo a un
processo di scattering anelastico con conseguente transizione in uno stato eccitato del
nucleo che acquista anche una certa energia cinetica di rinculo ; analogamente si
comporta un nucleo di ossigeno 16 (O16). Mentre però il C12 eccitato emette un raggio
gamma prima di fermarsi, l'O16 lo emette dopo essersi fermato. Utilizzando
un'attrezzatura capace di rilevare i raggi γ dopo che questi hanno coperto una certa
distanza, i ricercatori citati hanno constatato che non vi era alcuna differenza fra i
percorsi coperti dai raggi γ provenienti dagli atomi di carbonio, sorgente in moto, e da
quelli provenienti dagli atomi di ossigeno, sorgente fissa : pertanto risultano eguali
anche le velocità dei due raggi. Dato che i raggi γ non sono altro che radiazione
elettromagnetica come la luce, questa esperienza dimostra l'indipendenza della
velocità dei segnali luminosi dal moto della sorgente.
15.3.4 Il carattere relativo della simultaneità
Mostreremo ora come l'ipotesi introdotta sulla propagazione della luce sia in grado
di fornire un criterio per risolvere la questione da noi posta alla fine del paragrafo
15.3.2, ossia per decidere se due eventi che si verificano in punti diversi dello spazio
siano o no simultanei. A questo proposito osserviamo che,
222
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
nella fisica prerelativistica, si è sempre ritenuto come sicuramente acquisito che in
ogni caso il giudizio sulla contemporaneità o meno di due eventi dovesse essere lo
stesso in tutti i sistemi di riferimento, indipendentemente dal loro moto. Con la teoria
della relatività si viene invece ad adottare la seguente definizione di simultaneità: due
eventi che si producono nei punti P e Q di un sistema di riferimento inerziale S sono
simultanei in S se e solo se la luce emessa in tali punti al manifestarsi dei due eventi
arriva simultaneamente al punto di mezzo del segmento PQ nel sistema S. Questa
definizione implica l'assunzione dell'ipotesi formulata al paragrafo precedente sulla
propagazione della luce. Siano ora
e
due eventi che si verificano
simultaneamente nei punti P e Q di un riferimento inerziale S e sia M il punto di
mezzo di PQ in S. Considerato ora un secondo sistema inerziale S′, mobile lungo la
direzione di PQ, siano P' e Q' i punti in S' nei quali si verificano
e e sia M' il
punto di mezzo di P' Q' in S' (Fig. 15.6a): per la simultaneità degli eventi e
in S, i
segnali luminosi si incontreranno in M. Dato però che l'incontro avviene (per la
velocità finita della luce) con un certo ritardo dopo l'emissione dei segnali, all'istante
di detto incontro M e M' saranno spostati l'uno rispetto all'altro (Fig. 15.6b). Siccome
ovviamente i segnali non possono incontrarsi e in M e in M', ne deriva che gli eventi
simultanei in S, non sono più tali in S'. Se ne conclude che la simultaneità in punti
diversi è un concetto relativo, dipendendo dal moto del sistema di riferimento. Ciò
porta inevitabilmente a rinnegare l'ipotesi di Newton del tempo assoluto.
FIG. 15.6
- a), b) dimostrazione del carattere relativo della simultaneità.
Ovviamente la definizione di simultaneità data precedentemente permette di
sincronizzare due o più orologi in riposo l'uno rispetto all'altro. Infatti, supposto di
avere due orologi l'uno nel punto P l'altro nel punto Q, basterà inviare da P verso Q un
segnale luminoso all'istante t0 segnato dall'orologio in P. L'orologio in Q risulterà
sincronizzato con quello in P se all'arrivo del segnale luminoso esso segnerà il tempo
t1, tale che t1 - t0 = d/c, essendo d la distanza da Q a P.
La correlazione invece del tempo segnato dai due orologi in P e in Q, quando Q si
muove rispetto a P, è più complicata e verrà discussa in seguito.
15.3.5 La trasformazione di Lorentz
Abbandonata cosi una delle ipotesi fondamentali sulle quali nella fisica
prerelativistica si fondava la deduzione delle formule di trasformazione che
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA.
223
permettevano di passare da un sistema di riferimento S a un altro S' in moto rettilineo
uniforme rispetto al primo, occorrerà riprendere la deduzione di tali formule di
trasformazione da noi sviluppata nel paragrafo 15.1.2.
Si assumeranno ora le seguenti due ipotesi :
1a Ipotesi: «Costanza della velocità della luce» — come è stata enunciata nel
paragrafo 15.3.3.
2a Ipotesi: «Reciprocità del moto» — nella stessa forma enunciata al paragrafo 15.1.2.
Seguendo passo per passo la deduzione del paragrafo 15.1.2 delle trasformazioni di
Galileo, anche qui il principio d'inerzia imporrà che le relazioni cercate siano della
forma:
Supponendo ora per semplicità di considerare una traslazione lungo l'asse x, e di
prendere gli assi mobili coincidenti all'istante iniziale con quelli fissi, e ripetendo per
gli assi y e z le stesse considerazioni del paragrafo 15.1.2, si arriva immediatamente a
stabilire che le formule di trasformazione potranno ridursi alla forma:
(15.15a)
Tenendo presente che eseguendo una riflessione dell'asse x in S e dell'asse x' in S', e
cioè x→ - x e x' → - x', il sistema S risulta traslare rispetto a S' con velocità +w, e cioè
nello stesso modo in cui, prima della riflessione, S' traslava rispetto a S, si deduce che
deve essere: μ.(-w) = μ (w).
Le due ultime equazioni delle (15.15a) potranno quindi riscriversi:
(15.15b)
Risolvendo la seconda rispetto a t' e tenendo conto della prima si ha:
(15.16a)
ove si è posto:
(15.16b)
Per calcolare il coefficiente μ (w) ricorriamo al principio della costanza della
velocità della luce : un raggio luminoso partito per esempio all'istante t' = t = 0
224
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
dall'origine comune O' = O dei due sistemi S' e S deve, dopo un tempo rispettivamente
t' e t, aver raggiunto tutti i punti della superficie di una sfera di centro O' = O e raggio
rispettivamente ct' e ct. Dovranno cioè valere contemporaneamente le due equazioni :
Considerando i due punti di intersezione della sfera con l'asse x (rispettivamente x'),
le equazioni precedenti si riducono alle:
la prima di queste ci dà:
x = ct
e
x = - ct ;
in corrispondenza di questi valori, dalla prima equazione delle (15.15b), tenendo conto
della (15.16a), si ottiene:
(15.17)
che, dovendo essere soddisfatte per ogni valore di t, comportano che:
Sottraendo membro a membro, e tenendo conto della (15.16b) si ha:
Scartando la soluzione negativa, dato che x e x' sono equiversi, si ottiene:
e di conseguenza per la (15.17):
(1) È facile verificare che le μ e v da noi trovate sono soluzioni del sistema (15.17); anzi sono
le uniche soluzioni del problema fisicamente significative.
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
225
Riunendo i risultati ottenuti, si ha in definitiva:
(15.18a)
Si può verificare inoltre che questi valori soddisfano la relazione:
La trasformazione (15.8a) ha cioè la proprietà di lasciare invariata la forma
quadratica.
Le (15.18) esprimono la celebre trasformazione di Lorentz, che sostituisce la
trasformazione di Galileo della fisica prerelativistica. Come abbiamo già avuto
occasione di dire (paragrafo 15.1.1) e come mostreremo più avanti, tale
trasformazione gode della proprietà di lasciare covarianti le equazioni di Maxwell del
campo elettromagnetico.
Le formule inverse delle (15.18a) si possono ottenere o risolvendo questo sistema
rispetto a x, y, z, t, o anche più semplicemente (per l'ipotesi della reciprocità del moto)
scambiando x, y, z, t, con x', y', z', t', e w con - w; esse sono quindi:
(15.18b)
Giova osservare che le (15.18a) e (15.18b), quando in esse si faccia tendere c a ∞
(e quindi β a 0), si riducono alle (15.7), (15.8) del paragrafo 15.1.2 della
trasformazione galileiana.
Ciò era d'altronde da aspettarsi, perché il far tendere c a ∞ equivale ad ammettere
che i segnali luminosi si propaghino istantaneamente : ma in questo caso, come
sappiamo, ha senso la definizione di tempo assoluto (t = t'), e quindi le ipotesi assunte
in questo paragrafo per dedurre le formule di trasformazione da S a S' coincidono con
quelle nel paragrafo 15.1.2 per la deduzione della trasformazione galileiana.
Comunque questa osservazione ci assicura che quando w « c la trasformazione
galileiana è valida con buona approssimazione e nessuna difficoltà si incontra
praticamente nell'adozione delle equazioni della meccanica prerelativistica: d'altronde
in questo caso, che si verifica nella maggior parte dei problemi che si incontrano nello
studio delle proprietà dei corpi macroscopici, l'esperienza testimonia della correttezza
dei risultati che da tali equazioni conseguono.
Si noti che le (15.18a) non danno la trasformazione più generale che, pur essendolineare in modo da soddisfare il principio di relatività applicato alla legge d'inerzia,
lasci invariata l'espressione x2 + y2 + z2 - c2t2. Le (15.18a) costituiscono cioè, come si
suol dire, una trasformazione speciale di Lorentz. La trasformazione più generale è
più complicata: essa si ottiene componendo
226
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
la traslazione rappresentata dalla (15.18a) con un numero opportuno di rotazioni
spaziali ordinarie. Ci riserviamo ad ogni modo di studiare più particolareggiatamente
in seguito le proprietà analitiche delle trasformazioni di Lorentz e di discutere la loro
interpretazione geometrica.
Osserviamo infine che in alcune trattazioni si preferisce procedere alla deduzione
della trasformazione di Lorentz partendo dal principio di relatività einsteiniana. Basta
allora ammettere che la velocità della luce abbia, in tutte le direzioni, il valore c in un
particolare sistema di riferimento (ad esempio quello delle Stelle fisse), per dedurre
che essa dovrà avere lo stesso valore c, in tutte le direzioni, anche in qualsiasi altro
sistema che si muova rispetto al primo di moto traslatorio uniforme. Ci sembra però
che da un punto di vista concettuale sia più opportuno tenere distinto il principio di
relatività dalle ipotesi che si devono assumere per stabilire formule di passaggio da
un sistema di riferimento inerziale a un altro (confronta il procedimento
corrispondente per la deduzione della trasformazione di Galileo).
Infatti il problema di determinare le formule per il passaggio da un sistema di
riferimento a un altro si pone indipendentemente dal fatto che le leggi della fisica
soddisfino o meno il principio di relatività.
15.3.6 Conseguenze immediate della trasformazione di Lorentz
Con l'aiuto delle equazioni (15.18a) che costituiscono la trasformazione di Lorentz
si possono trarre alcune immediate conclusioni circa il modo di confrontare misure di
lunghezza e di intervalli di tempo, eseguite in due sistemi di riferimento S e S' in
moto rettilineo ed uniforme l'uno rispetto all'altro.
Supponiamo, ad esempio, che in S e in S' si misuri la lunghezza di una sbarra
parallela all'asse x, la quale si trovi in quiete rispetto a S'. È ovvio come si procederà
in S' nell'eseguire tale misura. Per quanto concerne invece il riferimento S, rispetto a
cui la sbarra si muove con velocità w, per eseguire la misura si dovrà, in un dato
istante, segnare su di un segmento di retta (asse x) le posizioni simultanee (rispetto ad
S) dei due estremi di essa e poi, al solito modo, misurare la distanza fra i due segni.
Nel riferimento fermo S', per quanto abbiamo detto, per eseguire la misura si potrà
riportare semplicemente lungo la sbarra data il regolo-unità un numero opportuno di
volte. Denotando con A e B gli estremi della sbarra, nel riferimento S' si troverà così
la lunghezza della sbarra:
l' = x'B - x'A .
Nel riferimento S invece si segnerà in uno stesso istante (che assumeremo come
istante O, misurato dall'orologio di S) i due segni dell'asse x che corripondono, come
abbiamo detto, agli estremi della sbarra. Se essi sono xA e xB, la lunghezza della sbarra
rispetto a S sarà
l = xB - xA.
Le (15.18a) forniscono una relazione che lega l con l'. Infatti dalla prima
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
227
di esse si trova:
e quindi:
ossia:
(15.19)
Se ne conclude che la lunghezza / della sbarra in movimento è minore della sua
lunghezza l' di quiete. In altri termini la sbarra in moto risulta contratta nel rapporto
1− β 2 .
È facile vedere invece che, come conseguenza della seconda e della terza delle
(15.18), per una sbarra disposta normalmente nella direzione del suo moto non vi
deve essere differenza fra i risultati delle misure eseguite nei sistemi di riferimento S
e S'.
Consideriamo ora due eventi
che, rispetto ad S', avvengono entrambi
nello stesso punto (e sia questo l'origine degli assi del sistema di riferimento S'
fermo), uno all'istante 0 e uno all'istante τ' ; essi avranno dunque in S' le coordinate :
Dalle (15.18a) si ricava che gli stessi eventi, osservati in S, avvengono negli
istanti :
per cui la durata τ = t2 - t1 misurata da un orologio in S sarà:
(15.20)
Se ne conclude che la durata τ di un fenomeno in un corpo in movimento è
maggiore di quella dello stesso fenomeno in un corpo fermo; in altri termini la durata
di un fenomeno risulta dilatata, a causa del moto, nel rapporto 1/ 1 − β 2 . Si suoi
dire, sia pure impropriamente, che un orologio viene rallentato dal movimento.
228
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Il significato fisico dei risultati precedenti può essere chiarito in base alle seguenti
considerazioni. Prendiamo in esame le misure di lunghezza e supponiamo, per fissare
le idee, che un osservatore terrestre ed un osservatore su un treno, dotato di moto
rettilineo uniforme rispetto alla terra, procedano alla misura della lunghezza di un
oggetto nei loro rispettivi sistemi di riferimento. Due aste a risposo nello stesso
riferimento sono da considerarsi della stessa lunghezza se è possibile disporle l'una
accanto all'altra in modo che i loro rispettivi punti estremi A, A' e B, B' coincidano.
Lo stesso criterio può essere usato per confrontare lunghezze su due corpi in moto
relativo se dette lunghezze sono fra loro parallele e perpendicolari alla direzione del
moto relativo. Se invece esse sono parallele alla direzione occorre un'analisi un po'
più particolareggiata. Consideriamo pertanto un'asta Y a riposo in un sistema di
riferimento inerziale, e due aste identiche AB e A' B' in moto con velocità uguali ed
opposte nella direzione Y. Non è difficile immaginare un dispositivo che stabilisca in
quali punti di Y i due estremi destri e sinistri delle aste si incontrano. Le formule
relativistiche prevedono che la distanza fra i suddetti punti sarà minore della
lunghezza di una singola asta a riposo e che sarà tanto più piccola quanto maggiore è
la velocità. Vogliamo renderci conto di come questa contrazione sia strettamente
connessa con il carattere relativo della simultaneità. Supponiamo infatti che le aste
AB e A' B' di Fig. 15.7 siano a riposo rispettivamente nei sistemi S e S' e che Y sia a
riposo nel riferimento S". Per ragioni di simmetria, gli eventi
in
corrispondenza dei quali A incontra A' e B incontra B', rispettivamente, sono
simultanei in S''. L'incontro in S" di segnali luminosi da A e B, avverrà esattamente
nel punto di mezzo delle posizioni spaziali di A e B. Nel riferimento S, invece,
precede
onde A'B' è da considerarsi più corto di AB. Analogamente in S' si ha che
precede
, onde AB è da considerarsi più corto di A'B'.
FIG.
15.7 - Misurazione della lunghezza in sistemi inerziali in moto relativo.
Illustreremo ora con un esempio il significato della misura relativistica del tempo
e delle relazioni fra i valori che, con tale misura, si ottengono in sistemi in moto
relativo. Sia dato un corpo (ad es. un treno) che si muova parallelamente rispetto a
un altro
(ad es. un secondo treno) con velocità v. Sia S un sistema di riferimento
solidale col primo corpo (mobile) e S' uno solidale col secondo( fermo) (Fig. 15.8),
Supponiamo che nei punti A, B, C di
di coordinate (in S) rispettivamente
x = - d, 0, + d si verifichi contemporaneamente (istante t = 0) un evento (ad es.
accensione di una lampadina).
Nel sistema S', solidale co) corpo , tali eventi non risulteranno più contemporanei
15.3]
FIG. 15.8
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
229
- Confronto delle misurazioni di durate temporali in sistemi inerziali in moto relativo.
temporanei ma si verincheranno, in virtù della formula t ′ =
t−β
x
c negli istanti :
1− β 2
Se successivamente, all'istante t = τ, sul corpo (sistema S) si produce una nuova
serie di eventi (ad es. spegnimento contemporaneo delle lampade in A, B, C) avremo
che tali eventi su
(sistema S') si verificheranno negli istanti:
La durata dei fenomeni (lampadina accesa) in A, B, C, che nel riferimento S è
uguale a t, risulterà anche in S' la stessa per tutti e tre i fenomeni, essendo essa :
in accordo con la formula di dilatazione del tempo. Reciprocamente, assunto che
all'istante t' = 0 si producano su
(sistema S') una serie di eventi contemporanei in
A', B', C' (di coordinate x' — d, 0, + d), essi su (sistema S in moto rispetto a S' con
velocità - v) si verincheranno rispettivamente negli istanti :
Analogamente una seconda serie di eventi contemporanei in S' all'istante
230
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
t' = τ verrà osservata in S ad istanti diversi :
La durata dei fenomeni in A', B', C', determinati dai due successivi eventi, e che in
S' è data da t, in S risulterà:
Come si vede dall'esempio ora illustrato i sistemi S e S' sono completamente
equivalenti nella descrizione dei fenomeni.
Verifiche sperimentali. La formula (15.20) ha trovato una verifica sperimentale
diretta nello studio di due fenomeni:
a) la dipendenza della vita media di un mesone in moto dalla sua velocità;
b) l'esistenza di un effetto Doppler trasversale.
Incominciamo col considerare il primo di questi fenomeni:
a) Dipendenza dalla velocità della vita media di un mesone in moto. È noto che la
maggior parte dei mesoni che si osservano al livello del mare o ad altezze di qualche
migliaio di metri sono mesoni μ (di massa pari a ~ 206 volte la massa dell'elettrone e
carica ± e). Una numerosa serie di esperienze di diverso tipo ha dimostrato con
sicurezza che il mesone μ è radioattivo, vale a dire che esso si disintegra
spontaneamente, dopo una vita media τ0
2,15 ⋅ 10-6 s, in un elettrone (con carica
dello stesso segno del mesone) più due neutrini.
Procedimenti sperimentali, cui ora accenneremo, permettono di misurare
indipendentemente la vita media di un mesone μ a riposo e quella di un mesone μ.
che si muove con velocità nota. È così possibile determinare sperimentalmente la
dipendenza della vita media di disintegrazione dalla velocità della particella e
stabilire quindi se tale dipendenza è in accordo con quella prevista dalla teoria della
relatività.
Per la misura diretta della vita media τO del mesone a riposo si ricorre al metodo
seguente ideato da C. G. Montgomery, W. E. Ramsey, D. B. Cowie e D. D.
Montgomery, migliorato da F. Rasetti e usato con ulteriori perfezionamenti da altri. I
mesoni incidenti, rivelati da un contatore di Geiger-Mùller, sono frenati ed arrestati
da una massa di metallo assorbente; dopo un certo tempo dal loro arrivo, essi si
disintegrano e l'elettrone emesso, lanciato fuori dalla massa del metallo, è a sua volta
rivelato per mezzo di un altro contatore.
Tramite un'opportuna tecnica elettronica si registrano le coincidenze fra i segnali
del contatore d'entrata, ritardati di un certo intervallo di tempo t0, ed i segnali del
contatore d'uscita.
In pratica si osservano i conteggi sulla scala del contatore d'entrata e quelli sulla
scala del dispositivo di coincidenza dopo un certo intervallo di tempo Δt a partire da
un'origine dei tempi convenuta ; dalla prima scala si ottiene il numero N0 di mesoni
arrivati nella massa metallica durante il tempo Δt, dalla
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
231
seconda il numero N0 f(Δt) di mesoni disintegrati nello stesso intervallo di tempo. La
differenza N0 - N0f(Δt) costituisce il numero N(Δt) dei mesoni presenti nella massa
metallica all'istante Δt.
⎞
⎛
1
Dalla legge fondamentale per il decadimento radioattivo ⎜⎜ dN = − Ndt ⎟⎟ si ricava
τ0
⎠
⎝
immediatamente la relazione che lega il numero di particelle residue al tempo Δt ;
sarà :
Ripetendo le osservazioni ad intervalli di tempi successivi e riportando in
(Δt ) in corrispondenza a vari Δt, i
carta semilogaritmica i valori sperimentali per ln
N0
punti risultano effettivamente allineati ed il coefficiente angolare della retta
interpolata è l'inverso della vita media τO.
Il valore più attendibile, determinato con misure di questo tipo, è:
Data la brevità della vita media del mesone, se non valesse la legge relativistica di
trasformazione del tempo per un evento che si verifica in un corpo in moto,
risulterebbe difficile spiegare il fatto che, come dimostra l'esperienza, i mesoni
provenienti dagli alti strati dell'atmosfera siano, capaci di attraversare diversi
chilometri di atmosfera; infatti, anche supponendo che essi si muovano con la
velocità della luce, dovrebbero percorrere in media soltanto un tratto di circa 600 m
nel tempo τO. Tenendo invece conto della teoria della relatività, per un mesone dotato
di energia:
con m0 = massa di riposo del mesone
essendo
la velocità del mesone, la vita media misurata nel sistema di riferimento terrestre
avrà il valore:
e di conseguenza la distanza percorsa in media del mesone risulterà data da:
232
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Dalla formula precedente risulta in particolare che un mesone di energia pari a
1 GeV=109 eV= 1 ⋅ 591 ⋅ 10-3 erg potrà percorrere in media, prima di disintegrarsi,
una distanza di circa 6,4 km. Il lungo percorso che un mesone è in grado di
compiere, nonostante la sua breve vita media, può essere considerato come una
conferma qualitativa della legge relativistica di trasformazione del tempo (1).
Una verifica quantitativa di questa legge nel fenomeno della disintegrazione del
mesone n è stata ottenuta da B. Rossi e B. D. Hall. Il principio del loro metodo di
misura è il seguente: per mezzo di misure di assorbimento dei mesoni nell'atmosfera,
dalla legge:
che regola tale fenomeno di assorbimento, si ricava il percorso medio L relativo a
mesoni in uno stretto intervallo di energia attorno ad un valore E. D'altra parte il
percorso medio L di un mesone di energia totale E = mc2 è:
Nelle loro esperienze Rossi e Hall osservavano mesoni di energia ≥ 5 ⋅ 108 eV; per
mesoni di tale energia è:
vale a dire:
Si può quindi porre nella (15.21), senza commettere alcun sensibile errore, v = c; da
cui si ottiene:
(15.22)
I risultati sperimentali dimostrano che il rapporto L/E è sensibilmente costante
(1) Si noti che, se si osservasse il fenomeno ih un sistema di riferimento S solidale col
mesone, la vita media di questo risulterebbe eguale a τO, mentre il cammino che il
mesone deve percorrere per arrivare sulla superficie terrestre risulterebbe in S eguale a
l = L 1 − β 2 ,che può ancora essere percorso durante la vita media τO del mesone, dato
che l = L 1 − β 2 =υτ0.
Si vede da ciò come la descrizione del fenomeno sia del tutto indipendente dal sistema di
riferimento rispetto al quale esso si osserva.
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
233
al variare di E, come richiesto dalla (15.22). Inoltre il valore numerico di tale
rapporto risulta pari a circa 4,5 ± 0,6 km/GeV, onde tenendo conto del valore della
massa di riposo del mesone μ si trova:
in ottimo accordo con le misure dirette sopra citate.
Verifiche analoghe sono state eseguite anche su mesoni π prodotti artificialmente
in macchine acceleratrici.
b) Effetto Doppler trasversale. Un'altra verifica sperimentale della formula (15.20)
per la dilatazione relativistica del tempo si può avere attraverso l'osservazione del
cosiddetto effetto Doppler trasversale.
È noto come la fisica classica dia un'interpretazione elementare dell'effetto
Doppler, vale a dire del cambiamento di frequenza della luce emessa da una sorgente
in moto con una velocità v rispetto a un sistema S. Precisamente, secondo la fisica
classica, se v0 è la frequenza della radiazione emessa dalla sorgente O in un sistema
fermo rispetto a questa, la frequenza v, misurata in un punto P nel sistema S' in moto
rispetto a S con velocità v, risulta data da:
(15.23)
denotando con ϑ l'angolo di v con PO.
Nella trattazione relativistica del fenomeno, detto T0 il periodo della sorgente
della radiazione (misurato nel sistema S), si avrà che nel sistema S' tale periodo
risulterà uguale a:
da cui si deduce immediatamente la relazione che lega le frequenze corrispondenti:
La formula relativistica dell'effetto Doppler si otterrà pertanto dalla formula
classica (15.23) sostituendo in questa v* a v0. Si ha così:
(15.24)
Supponendo in particolare che il moto della sorgerrte~avvenga lungo la retta PO,
si dovrà porre cosϑ = - 1 o cos ϑ = 1, a seconda che trattisi di avvicinamento
234
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
mento della sorgente al riferimento S' o di allontanamento; avremo pertanto:
che costituisce la legge del cosiddetto effetto Doppler longitudinale, il solo
considerato nella trattazione ordinaria elementare.
Supponendo invece la sorgente in moto normalmente alla direzione di
osservazione (cosϑ = 0), si avrà:
che costituisce la legge del cosiddetto effetto Doppler trasversale, per il quale la
grandezza v - v0, contrariamente all'effetto longitudinale, è proporzionale circa a β2, e
quindi di assai più difficile osservazione, tanto che tale effetto non era mai stato
messo in evidenza prima dell'avvento della teoria della relatività.
L'effetto Doppler trasversale, tipicamente relativistico, è estremamente difficile da
rilevare, non solo perché si tratta di un effetto assai piccolo (dell'ordine di β2), ma
anche perché una piccolissima deviazione nel dispositivo sperimentale dalla perfetta
ortogonalità fra direzione del moto della sorgente e direzione di osservazione è causa,
in conformità della (15.24), della comparsa di un effetto legato al termine β cos ϑ del
primo ordine, che rende illusoria la misura dello spostamento spettrale dovuto
all'effetto Doppler del secondo ordine.
È ovvio d'altra parte che un tentativo di misura delle correzioni relativisti-che,
legate ai termini in β2, sull'effetto Doppler longitudinale (cosϑ = 1) è così fortemente
mascherato dall'esistenza dell'effetto legato ai termini del primo ordine in β, che solo
una conoscenza assai più precisa di quella che in pratica si ha per il valore di β
potrebbe rendere tale tentativo coronato da successo.
Ives e Stilwell hanno superato le difficoltà ora ricordate, che per un certo tempo
erano state ritenute insormontabili, osservando simultaneamente la radiazione emessa
da una stessa sorgente nei due sensi opposti di una medesima direzione (precisamente
per ϑ assai vicino a 0 ed a π). Si ha allora, ponendo rispettivamente nella (15.24) ,
ϑ = 0 e ϑ = π:
o, nella scala delle lunghezze d'onda:
Il baricentro delle due righe prodotte per effetto Doppler corrisponderà
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
235
alla lunghezza d'onda:
e pertanto non coincide, come invece prevedeva la teoria prerelativistica, con la
posizione della riga non spostata emessa dalla stessa sorgente a riposo nel sistema di
osservazione; rispetto a questa posizione, che corrisponde alla lunghezza d'onda λ0,
tale baricentro è spostato, verso il rosso, di una quantità:
(15.25)
Per via sperimentale è pertanto possibile misurare lo spostamento del secondo
ordine Δ'λ. e confrontarlo con il valore teorico, che può essere calcolato prendendo
per il valore della velocità βc, con cui si sposta la sorgente, quello che può dedursi
dalla misura dello spostamento spettrale del primo ordine:
(15.26)
Le esperienze ideate da Ives e Stilwell si realizzano impiegando uno speciale tubo
a raggi canale che permette di ottenere un fascio di ioni rigorosamente
monocromatico. Normalmente si usa un tubo contenente idrogeno molecolare, le cui
molecole vengono dissociate e ionizzate bombardandole con gli elettroni emessi da
un filamento. Sul percorso degli ioni così prodotti si stabilisce, tramite una coppia di
elettrodi forati, che permettono il passaggio degli ioni, una d.d.p. acceleratrice molto
elevata. Per mezzo di uno spettrografo a reticolo a forte dispersione si esaminano le
radiazioni emesse dal fascio di atomi di idrogeno (ottenuti dalla ricombinazione degli
ioni con gli elettroni all'uscita del campo elettrico), osservando il raggio propagantesi
verso la fenditura e l'altro nel senso opposto.
I risultati sperimentali ottenuti da Ives e Stilwell esaminando la riga Hβ (4861 Å)
dell'idrogeno e operando con tensioni fino a oltre 40 000 V sono riportati sul
diagramma di Fig. (15.9). L'accordo fra teoria ed esperienza, come si vede, è
eccellente.
FIG. 15.9
- Effetto Doppler trasversale.
236
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Si noti che in questa esperienza le velocità degli atomi emettitori non superavano
il valore di 0,007 c.
15.3.7 La composizione delle velocità nella cinematica relativistica
Ci proponiamo ora di ricavare dalle formule di trasformazione lorentziana un
teorema analogo a quello della composizione delle velocità che, nella fisica
prerelativistica, deriva immediatamente dalle formule di trasformazione galileiana.
Sia v la velocità di un punto mobile rispetto a S e v' quella dello stesso punto rispetto
a S', il quale si muove con velocità w costante rispetto a S.
Per definizione si ha:
(15.27)
D'altra parte, differenziando le (15.18b), si ottiene (avendo scelto gli assi
x e x' dei due sistemi di riferimento coincidenti con la linea di applicazione
del vettore w):
(15.18c)
Dividendo rispettivamente dx, dy, dz per dt si ricava:
e, ricordando le definizioni (15.27) si hanno le formule:
(15.28a)
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
237
le quali, assieme alle loro inverse che si ricavano immediatamente applicando il
principio di reciprocità del moto e cioè le:
(15.28b)
sostituiscono le corrispondenti formule galileiane (15.9a) e (15.9b) del paragrafo
15.1.2, ed a queste si riducono, come facilmente si verifica, per β « 1.
Una caratteristica importante, che si nota nelle formule (15.28) consiste nel fatto
che anche le componenti della velocità del punto mobile perpendicolari alla velocità
di trascinamento sono alterate quando quest'ultima velocità viene composta con la
velocità del punto mobile rispetto al primo sistema : ciò risulta infatti dalle ultime
due equazioni del gruppo (15.28).
Dalle (15.28) è pure facile dedurre la relazione che lega i moduli della velocità
del corpo mobile rispetto ai sistemi di riferimento S e S'. Si ha infatti con calcoli
immediati :
da cui introducendo i moduli delle velocità e con ovvi passaggi:
(15.29)
Dalle formule di composizione delle velocità nella cinematica relativistica si può
dedurre immediatamente che la velocità della luce nel vuoto, c, può essere
considerata, in questa teoria, come il valore limite superiore di ogni possibile
velocità che possa essere impressa ad un corpo o a un segnale fisico qualsiasi.
Infatti, in accordo con la prima delle equazioni (15.28), anche attribuendo a S' una
velocità w = c rispetto a S, e al punto mobile una velocità (rispetto a S') pure eguale
a c e diretta lungo x (che è pure la direzione del vettore w), nel sistema S si misurerà
una velocità del punto mobile data da:
(basta che sia w = c, oppure vx = c, perché risulti v'x = c).
D'altronde il carattere limite della velocità della luce nella cinematica
relativistica risulta evidente anche dalle formule (15.19) e (15.20), che danno la
contrazione delle lunghezze e la dilatazione degli intervalli temporali.
238
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Infatti dette formule perdono per w > c, cioè per β > 1, ogni loro significato, in
quanto, corrispondentemente a tali valori, il fattore
1 − β 2 diverrebbe
immaginario.
Vedremo più avanti come una verifica diretta delle formule relativistiche di
composizione delle velocità sia data dall'esperienza già ricordata di Fizeau.
15.3.8 Il cronotopo: definizione e proprietà
Vogliamo ora studiare un metodo geometrico, dovuto a Minkowski, per
rappresentare le trasformazioni lorentziane ed in genere tutti i risultati della
cinematica relativistica. In questa rappresentazione l'insieme di una quaterna di
valori per le variabili x, y, z, t, si assume a coordinate di un punto cronotopico o
evento elementare in uno spazio a quattro dimensioni detto spazio-tempo o
cronotopo.
L'ordinario spazio geometrico (x, y, z) è allora l'insieme tridimensionale dei
punti cronotopici simultanei (cioè per t = cost).
Mentre un punto P si muove nello spazio ordinario tridimensionale, variano le
sue coordinate spaziali insieme al tempo. La sua storia (cinematica) è rappresentata
dalla successione delle posizioni assunte dal punto rappresentativo nel cronotopo:
l'insieme di tali posizioni forma una linea, detta linea universale, o linea oraria, o
linea cronotopica. L'inclinazione della linea rispetto all'asse t, determinata dai
dx dy dz
valori delle derivate
, , , che sono funzioni di t, indica in ogni istante la
dt dt dt
velocità vettoriale del punto mobile rispetto al sistema di riferimento spaziale.
Essendo dx, dy, dz, dt gli incrementi che subiscono le coordinate di un punto-evento
del cronotopo quando si passa da detto punto ad un altro infinitamente vicino, si
definisce quadrato dell'elemento lineare del cronotopo la forma differenziale:
ds2 = c2dt2 - dx2 - dy2 - dz2 .
(15.30)
Per la speciale forma che ha questo elemento lineare (che ricorda la distanza di
due punti nello spazio ordinario), il cronotopo della relatività ristretta si dice
pseudoeuclideo. Con le locuzioni ora introdotte, si può affermare che le
trasformazioni lorentziane sono quelle che lasciano invariata la forma dell'elemento
lineare del cronotopo.
Vogliamo ora studiare un metodo geometrico, basato sulla rappresentazione
cronotopica, atto a mettere in luce le proprietà della trasformazione di Lorentz. Tale
metodo permette in particolare lo studio da un punto di vista formale delle relazioni
esistenti tra le varie grandezze fisiche in due diversi sistemi di riferimento.
Immaginiamo in un primo tempo, per metterci nel caso più semplice e intuitivo,
di avere un punto materiale che si muova lungo l'asse x. Per la descrizione della
storia cinematica del punto ci si potrà riferire, anziché al cronotopo
quadrimensionale, ad un piano determinato degli assi x e t. Per ragioni di comodità.
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
239
assumiamo al posto della variabile t una nuova variabile Θ = ct convenendo anche
di assumere la stessa unità di lunghezza per la misura delle ascisse e per quella
delle ordinate (Fig. 15.10). Il nostro piano x, Θ è evidentemente un piano
FIG. 15.10
- Passato, presente e futuro nel cronotopo di Minkowski.
cronotopico, in quanto ogni suo punto rappresenta un punto-evento. Il moto del
nostro punto materiale sarà quindi rappresentato da una linea oraria nel piano x, Θ.
La condizione che il punto materiale si muova lungo l'asse x con una velocità
inferiore a quella della luce è espressa da:
cioè dal fatto che il coefficiente angolare della linea oraria in un punto qualsiasi di
questa deve essere minore di uno, ossia che la tangente della linea oraria in un suo
punto qualsiasi deve formare con l'asse dei tempi un angolo inferiore a 45°. Se si
tracciano perciò le due rette formanti un angolo di 45° con l'asse dei tempi (asse Θ)
ed aventi per equazioni:
tutte le linee orarie passanti per l'origine e corrispondenti a punti materiali che si
muovono con velocità minore di c (com'è richiesto dalla teoria della relatività)
risultano interne all'angolo tratteggiato compreso tra queste due rette, le quali sono
evidentemente le linee orarie di un punto che, partendo dall'origine, si muove con
la velocità della luce lungo l'asse delle x rispettivamente nel senso positivo ed in
quello negativo. In altre parole, dati due punti eventi
appartenenti alla
stessa retta di luce, un segnale luminoso emesso all'istante t = 0 nel punto x = 0
raggiunge il punto dell'asse x corrispondente all'ascissa di
nell'istante
corrispondente all'ordinata di .
Le due rette di luce dividono il piano cronotopico in tre parti: una (futuro fisico)
costituita da tutti i punti-eventi raggiunti dai segnali che partono dall'origine e che
si trasmettono con velocità inferiore a quella della luce, un'altra (passato fisico)
costituita da tutti i punti-eventi da cui possono partire dei segnali
240
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
diretti verso l'origine ed aventi velocità inferiore a quella della luce, ed infine una
terza costituita da punti-eventi per i quali passano le linee orarie di ipotetici
(fisicamente un esistenti) segnali che dovrebbero trasmettersi con velocità superiore
a quella della luce : i punti della terza zona non possono quindi avere alcuna
relazione con il punto-evento che abbiamo assunto come origine.
Si osservi esplicitamente che nelle considerazioni ora fatte l'origine degli assi non
rappresenta alcun punto-evento particolare, ma un punto-evento qualsiasi, quale ad
esempio quello in cui si trova l'osservatore. Rispetto a tale punto-evento si hanno
perciò tre zone cronotopiche di cui l'una rappresenta il futuro attivo, costituita dagli
eventi su cui l'osservatore può agire con un'azione fìsica; l'altra il passato passivo,
costituita dall'insieme degli eventi che possono aver avuto un'influenza fisica
qualsiasi sullo stato in cui si trova l'osservatore; e la terza una sorta di presente
inerte, costituito dall'insieme degli eventi su cui l'osservatore non può avere alcuna
influenza fisica e che a loro volta non possono esercitare alcuna influenza
sull'osservatore.
È facile estendere le considerazioni precedenti ad eventi che si svolgono in un
cronotopo a tre dimensioni (di coordinate x, y, Θ) vale a dire al caso di punti
materiali, che si svolgono in un piano ordinario xy. Immaginiamo allo scopo un
segnale luminoso il quale all'istante t = 0 parta dal punto O (x = 0, y = 0) ed arrivi
all'istante t nel. punto P (x, y).
L'equazione del raggio sarà:
ossia :
Questa equazione individua nel cronotopo tridimensionale (x, y, Θ) un cono retto
avente il vertice nell'origine, le cui sezioni con piani paralleli al piano x, y sono
cerchi col centro sull'asse Θ. Le generatrici di questo cono di luce sono le linee
orarie dei raggi luminosi partenti da O (x = 0, y = 0) in tutte le direzioni del piano
xy. Perciò un segnale luminoso emesso da O nell'istante t = 0 raggiunge il punto P
(x, y) nell'istante t che corrisponde alla coordinata appartenente al punto-evento
della falda superiore del cono di luce avente per proiezione sul piano xy il punto P.
Le considerazioni precedenti si possono infine estendere al caso generale in cui
il punto materiale si muove comunque nello spazio ordinario, in corrispondenza del
quale si ha da considerare un cronotopo tetradimensionale. Questo verrà ad essere
suddiviso ancora in tre zone: futuro fisico, che è la zona cronotopica contenuta
all'interno dell'ipercono anteriore, contenuta cioè all'interno della falda superiore
(Θ > 0) dell'ipercono di equazione:
passato fisico, costituito dalla zona cronotopica contenuta all'interno della falda
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
241
inferiore (Θ <0) dell'ipercono; presente inerte costituito dalla zona crono-topica
esterna all'ipercono di luce.
15.3.9 Superamento delle difficoltà della fisica prerelativistica
Abbiamo già avuto occasione di dire come nella fisica prerelativistica i risultati
di diverse misure ed esperienze — quali in particolare l'esperienza di Mi-chelson,
l'esperienza di Fizeau e la misura dell'aberrazione annua delle stelle — fossero in
inconciliabile contradizione fra di loro nonostante che si fosse ricorso, nel tentativo
di darne una spiegazione accettabile, all'introduzione di ipotesi artificiose e del tutto
improbabili sul comportamento dell'etere. Vogliamo ora mostrare come tali risultati
trovino invece un'immediata spiegazione nelle formule dianzi dedotte per la
cinematica relativistica.
a) Esperienza di Michelson. Il risultato negativo dell'esperienza di Michelson si
spiega quale conseguenza ovvia del postulato relativistico sulla costanza della
velocità della luce, il quale d'altra parte fu assunto proprio col preciso scopo di
giustificare il risultato di tale esperienza. Risultando infatti la velocità di una raggio
luminoso che propaga in uno dei bracci dell'interferometro sempre eguale a e ed
essendo l'interferometro fermo rispetto ad un osservatore terrestre, i bracci OA e OB
di detto interferometro (Fig. 15.1) avranno nel sistema di riferimento terrestre
sempre le stesse lunghezze l1 e l2. Sarà pertanto:
ed a rotazione avvenuta:
onde per il ritardo che dovrebbe produrre uno spostamento delle frange di
interferenza, si ha:
in accordo con l'esperienza.
b) Aberrazione annua delle stelle. Come abbiamo detto a suo tempo, questo
fenomeno si osserva confrontando le posizioni di una stella in due istanti diversi t e
t'. Considerando un sistema di riferimento solidale con la Terra, esso verrà ad
assumere agli istanti t e t' due posizioni diverse, che noi assumeremo come sistemi
S e S', e potrà quindi essere considerato in moto rispetto a S con la velocità w (se
l'intervallo t e t' è di sei mesi w risulterà eguale in modulo al doppio della velocità
w0 della Terra nel suo moto di rivoluzione). Scelti allora (Fig. 15.11) gli assi in
modo che l'asse x risulti orientato come il vettore w, sia a l'angolo che il raggio di
luce che arriva sulla Terra all'istante t forma con l'asse
242
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
y nel sistema S (si suppone il piano xy coincidente col piano che contiene la
direzione di w e il raggio ST), e sia α' il corrispondente angolo misurato all'istante t'
in S'.
FIG. 15.11
- Aberrazione di una stella.
La componente della velocità della luce lungo l'asse x nel sistema S è c sen α,
quella lungo x' in S' è invece e sen α'. Applicando allora la prima delle (15.28)
avremo :
da cui, dividendo ambo i membri per c, si ricava:
Togliendo + 1 ad entrambi i membri, dopo averli moltiplicati per β, e riducendo
allo stesso denominatore si ha:
da cui con semplici passaggi algebrici:
Essendo β « 1, potremo porre α' = α + ε e considerare β e ε come infinitesimi
del primo ordine. Sviluppando i calcoli in prima approssimazione si ottiene:
da cui la formula che da l'aberrazione:
(15.31)
In questa formula α — α' rappresenta l'angolo compreso fra le direzioni della
stella agli istanti t e t', cioè la misura dell'aberrazione della stella.
15.3]
I PRINCIPI DELLA RELATIVITÀ RISTRETTA
243
La formula (15.31), tenendo conto del significato dei simboli, coincide
praticamente con la (15.14) dedotta al paragrafo 15.2.3 basandosi sull'ipotesi,
dimostratasi poi insostenibile, dell'esistenza di un sistema privilegiato, da assumersi
come sede di tutti i fenomeni elettromagnetici, solidale col Sole. Anzi, il confronto
fra la (15.31) e la (15.14) è particolarmente significativo nel caso dell'aberrazione
che si rileva osservando una stella circumpolare a intervalli di sei mesi: infatti, in
questo caso, gli angoli ϕ di (15.2.3) e α di questo paragrafo risultato
rispettivamente eguali a 90° ed a 0°, l'angolo α - α' coincide con 2ψ0, la velocità w
che compare nella (15.31) viene ad essere uguale a 2w0 e di conseguenza le due
formule vengono proprio ad identificarsi (1).
e) Esperienza di Fizeau. Questa esperienza è direttamente interpretabile per mezzo
del teorema relativistico della composizione delle velocità. Prendendo infatti (Fig.
15.5) la direzione di propagazione della luce nell'acqua come asse x, dovremo
applicare la prima delle (15.28) per ottenere la velocità V della luce (che si propaga
nel liquido in moto) rispetto all'osservatore. Si ottiene così:
dove si deve prendere il segno + o il segno - a seconda del senso del moto del
liquido. Essendo w « c/n, potremo sviluppare in serie di potenze di β/n e trascurare
le potenze superiori alla prima, onde:
che, come abbiamo detto a suo tempo (cfr. paragrafo 15.2.3), costituisce la formula
richiesta per la spiegazione dei risultati sperimentali.
(1) Si noti che in generale la trattazione anche relativistica che si da nei vari testi
dell'aberrazione delle stelle non è corretta: infatti essa si basa di regola nel confrontare il
moto del raggio luminoso, rispetto ad un osservatore terrestre, con quello rispetto ad un
sistema associato al Sole od alla Stella considerata. Questo modo di procedere porta a
calcolare una grandezza che non è quella che in realtà ci forniscono le misure sperimentali e
che consiste nel confronto dei risultati ottenuti in due riferimenti solidali con la Terra in due
istanti diversi ; per di più esso porta al risultato (sperimentalmente dimostrato errato) di una
dipendenza del fenomeno dell'aberrazione stellare della velocità della Stella rispetto
all'osservatore.
244
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
15.4 Elettrodinamica Relativistica
15.4.1 Covarianza delle equazioni di Maxwell rispetto ad una trasformazione di
Lorentz
Il principio di relatività enunciato da Einstein esige che esso sia valido per tutti i
fenomeni fisici e non solo per quelli meccanici come esigeva invece lo stesso
principio secondo l'enunciato di Galileo. Ciò comporta la covarianza delle leggi che
regolano i fenomeni fisici quando si passa da un sistema di riferimento S a un altro
S' in moto rettilineo uniforme rispetto al primo. Tale passaggio, nella teoria
relativistica ristretta, avviene secondo una trasformazione di Lorentz che, nel caso
in cui all'istante iniziale t = t' = 0 si assumano coincidenti gli assi xyz e x' y' z' e la
traslazione w di S' rispetto a S avvenga lungo l'asse x=x', è del tipo speciale:
(15.32)
In particolare dunque dovranno essere covarianti rispetto a tale trasformazione
le equazioni di Maxwell nel vuoto:
(15.33)
con
Si osservi a questo proposito che il fatto che da queste equazioni si possa
dedurre la legge di propagazione dei raggi luminosi con velocità costante
c = 1 / ε 0 μ 0 rispetto a un sistema di riferimento inerziale non è condizione
sufficiente per assicurare che le equazioni di Maxwell siano covarianti rispetto a
una trasformazione di Lorentz. Infatti la legge di propagazione di un raggio
luminoso è solo un caso particolare dei fenomeni descritti dalle equazioni di
Maxwell e non è affatto evidente a priori che anche le leggi dei numerosi altri
fenomeni derivanti da queste equazioni soddisfino alle richieste condizioni di
invarianza.
15.4]
ELETTRODINAMICA RELATIVISTICA
245
La dimostrazione che l'intero sistema di equazioni di Maxwell (15.33) sia
covariante rispetto alle trasformazioni (15.32) è stata data, come già abbiamo
accennato (cfr. paragrafo 15.2.1), dallo stesso Lorentz ancor prima dell'avvento
della relatività einsteiniana.
Ometteremo tale dimostrazione, limitandoci a scrivere esplicitamente le •leggi
di trasformazione dei vettori E e B.
Esse sono:
(15.34)
Per le densità di carica e corrente si hanno ancora le formule di trasformazione:
avendo indicato con ρ0 la densità di carica nel sistema per cui w = 0.
Si noti che come conseguenza delle relazioni soprascritte e delle formule di
trasformazione per le coordinate spaziotemporali si ha che la carica elettrica dq
contenuta in un volume dV = dx dy dz :
è un invariante, cioè la carica dq è la stessa in tutti i sistemi inerziali. Questo
risultato vale in particolare per la carica e dell'elettrone e di qualsiasi altra particella
carica.
Un carattere preliminare delle formule di trasformazione (15.34) è che ciascuno
dei vettori E', B' dipende simultaneamente da E e da B: in altri termini la
separazione di un campo elettromagnetico nelle sue parti elettrica e magnetica
dipende dal moto del sistema di riferimento, per cui un campo che in un sistema
può venir considerato come puramente elettrico, in un altro sistema in moto rispetto
al precedente viene a possedere anche componenti magnetiche.
Questa caratteristica ha un significato geometrico profondo: infatti si potrebbe
dimostrare che il complesso delle sei componenti Ex, Ey, Ez, Bx, By, Bz, che
caratterizzano il campo elettromagnetico sono le componenti di un tensore
emisimmetrico Fαβ (α, β = 1, 2, 3, 4) associato alla varietà quadrimensionale detta
cronotopo o spazio-tempo (cfr. paragrafo 15.3.8).
246
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Ricordiamo ora che i vettori E e B del campo elettromagnetico si possono
derivare da un vettore A (potenziale vettore) e da uno scalare ϕ (potenziale
scalare) per mezzo delle relazioni:
Dalle formule di transizione (15.34) di E, B rispetto a una trasformazione di
Lorentz (15.32) è allora possibile ricavare le formule di trasformazione di ϕ, A.
Esse risultano date da:
(15.35)
Dal punto di vista dell'interpretazione geometrica si potrebbe anche qui
dimostrare che il complesso delle quattro componenti Ax, Ay, Az ϕ sono le
componenti Aα (α= 1, 2, 3, 4) di un vettore associato alla varietà quadrimensionale
detta cronotopo o spazio-tempo (cfr. paragrafo 15.3.8).
Si potrebbe infine verificare la covarianza sia delle equazioni dei potenziali
ritardati sia delle condizioni supplementari di Lorentz.
Osserviamo che la legge di trasformazione delle componenti del campo elettromagnetico non solo ha il vantaggio di mettere in evidenza la covarianza delle
equazioni di Maxwell rispetto ad una trasformazione di Lorentz e di permettere
l'esecuzione rapida dei calcoli per il passaggio da un sistema di riferimento ad un
altro, ma porta pure ad una nuova concezione del campo elettromagnetico stesso.
Questa concezione è una conseguenza dell'intima fusione del campo elettrico con
quello magnetico, i quali nella teoria della relatività costituiscono un ente unico;
essa permette inoltre di dare, anche nella approssimazione della fisica
prerelativistica (vale a dire quando si trascurano i termini dell'ordine di β2 = v2/c2),
un'interpretazione di alcuni fenomeni elettromagnetici diversa e forse più
espressiva di quella ordinaria. Illustreremo questa circostanza su di un esempio
semplice. In due riferimenti S e S' in moto relativo con velocità w si consideri
l'azione di un campo elettromagnetico su di una carica che si muove solidamente
ad S. Secondo l'ordinaria concezione maxwelliana in S si constaterà che il campo
elettrico esercita sulla carica q una forza:
F = qE
mentre il campo magnetico non esercita alcuna azione. Nel sistema S', rispetto al
quale la carica si muove con velocità w, si constaterà invece che il campo elettrico
E esercita ancora un'azione data dalla formula precedente, mentre il campo
15.41
ELETTRODINAMICA RELATIVISTICA
247
magnetico B eserciterà (come conseguenza della legge elementare di Laplace che
da origine alla cosiddetta forza di Lorentz) una forza : qw × B, onde
complessivamente :
F' = q (E + w × B).
Secondo la concezione relativistica invece, per trovare la forza esercitata sulla
carica e misurata in S' basterà applicare la formula di trasformazione del campo
elettrico per il passaggio dal sistema S a quello S' che, nell'approssimazione in cui
intendiamo eseguire i calcoli, risulta : E' = E + w × B, onde :
F' = qE' = q (E + w × B)
che coincide con la precedente. Da ciò si vede come, secondo la concezione
relativistica, la validità della legge di Lorentz non deve essere assunta come un
fatto sperimentale nuovo indipendente dalle equazioni del campo elettromagnetico
(il che si verifica nell'ordinaria concezione maxwelliana), ma è strettamente legata
alle leggi di trasformazione di detto campo.
15.4.2 Campo di un elettrone in moto e suo irraggiamento
Ci proponiamo ora di calcolare il campo di una particella carica dotata di moto
qualsiasi, allo scopo di derivare poi l'energia emessa sotto forma di irraggiamento.
L'applicazione delle formule relativistiche di trasformazione si dimostra
particolarmente utile a questo riguardo.
Cominceremo a trattare un caso particolarmente semplice, consistente nel
calcolo del campo elettromagnetico generato da una carica q puntiforme dotata di
moto rettilineo ed uniforme rispetto all'osservatore.
Detto S (O, x, y, z, t) un sistema di riferimento solidale con l'osservatore,
introduciamo un altro sistema S' (O', x', y', z', t'), solidale con la carica in moto con
velocità v rispetto al sistema S. Sia R' (x', y', z') la posizione della carica all'istante t'
= O (che supporremo coincidere con t = 0) nel sistema S'.
Essendo, come si è detto, questo sistema solidale con la particella in qualsiasi
istante, questa occuperà sempre la posizione R'. Vogliamo calcolare il campo
all'istante t = 0 nel punto O, che supporremo coincidere in tale istante con O'. In S'
il campo generato dalla particella (ferma) sarà un campo puramente elettrostatico,
vale a dire si avrà:
(15.36)
Si tratta ora di calcolare il campo osservato nel sistema S. Ciò può conseguirsi
per mezzo di una trasformazione di Lorentz. Assumendo per semplicità l'asse x di S
coincidente con x' di S', potremo applicare le formule (15.35) per la trasformazione
dei potenziali; avremo cosi:
(15.37)
248
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Esprimeremo r' in funzione delle coordinate relative al sistema S. Dato che,
come abbiamo già osservato, la posizione R' (riferita al sistema S') è indipendente
dal tempo, potremo eseguire il calcolo di r' per un istante qualsiasi: per esempio
l'istante t' in corrispondenza del quale si ha:
(15.38)
vale a dire:
Per l'invarianza delle equazioni ora scritte, avremo che per le coordinate x, y, z,
t, che caratterizzano lo stesso evento in S, si avrà pure:
(15.38a)
vale a dire:
Ma dalle formule della trasformazione speciale di Lorentz si ha:
Sostituendo in questa formula a ct ed a ct' le loro espressioni che si ricavano
rispettivamente dalla (15.38) e dalla (15.38a), si ottiene:
x
rappresenta la proiezione del vettore v, diretto lungo x, sulla
r
→
r
direzione r del vettore RO vale a dire la velocità radiale − v ⋅ calcolata all'istante
r
r
t = - r/c, cioè ad un istante precedente di un tempo quello (assunto come t = 0) in
c
cui l'osservatore determina il campo nel punto O. Conscguentemente le (15.37)
danno, per i potenziali del campo, ad un istante t:
Osserviamo che − v
dove le entità entro [
] denotano valori ritardati, cioè misurati all'istante che
precede r/c quello considerato dall'osservatore in O.
15.4]
ELETTRODINAMICA RELATIVISTICA
249
Le formule precedenti possono anche scriversi in forma vettoriale nel modo
seguente :
(15.39a)
Il significato fisico delle equazioni scritte discende immediatamente dal fatto
ben noto che le azioni elettromagnetiche si propagano con la velocità e. Infatti
(Fig. 15.12) esse danno il potenziale in un punto P (ove si esegue la misura)
FIG. 15.12
- Illustrazione del carattere ritardato delle azioni elettromagnetiche.
all'istante in cui la particella, muovendosi lungo la sua traiettoria rettilinea, passa
per un punto B. Nelle formule che determinano tale campo non figura però la
distanza r0 = BP, che separa la posizione della particella dal punto di osservazione
all'istante della misura, ma quella r = AP che separa la particella dal punto di
osservazione nell'istante in cui da essa partiva l'azione elettromagnetica che
giungerà in P all'istante considerato. Se indichiamo con r0 il raggio vettore che
congiunge la posizione B (all'istante t) della particella col punto di osservazione
P, e con r il raggio vettore che congiunge il punto A, ove si trovava la particella
all'istante t – r/c, con il punto P, si ha infatti :
come risulta chiaro tenendo presente che r/c è il tempo impiegato dall'azione
elettromagnetica per propagarsi da A a P, e che tale tempo è eguale a quello
impiegato dalla particella per spostarsi da A a B.
Si noti che essendo v costante si ha: [v] = v onde le (15.39a) possono scriversi:
(15.39b)
Queste formule, da noi dimostrate per una particella carica dotata di moto
rettilineo ed uniforme, sono valide in realtà per moti qualsiasi della particella.
250
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Esse vengono indicate nella letteratura come formule dei potenziali di WiechertLiénard.
Dall'espressione scritta dei potenziali A e ϕ si possono ricavare i vettori del
campo elettromagnetico E e B per mezzo delle solite relazioni:
I calcoli sono abbastanza complessi, per cui ci limiteremo a dare i risultati
finali. Si trova:
(15.40)
dove si è posto:
Come si verifica facilmente si ha:
cioè, il campo magnetico è ovunque perpendicolare al raggio vettore. Il campo
(15.40) può essere scomposto in due parti:
a) il campo E1 H1 che dipende solo dalle velocità ed è inversamente
proporzionale al quadrato della distanza:
(15.41)
b) il campo E2, H2 che dipende dall'accelerazione ed è inversamente
proporzionale alla prima potenza della distanza:
(15.42)
15.5]
DINAMICA RELATIVISTICA
251
Si può facilmente verificare che:
e che E2 e H2 sono perpendicolari al raggio vettore. Si ha inoltre la relazione fra i
moduli dei vettori:
cioè :
In altri termini le parti E2,H2 dei vettori E e H che dipendono dalla
accelerazione sono fra loro legate nel modo caratteristico di un'onda
elettromagnetica. I campi E2, H2 rappresentano un'onda sferica emessa
dall'elettrone. Il campo parziale El , H1, che dipende solo dalla velocità, è il campo
elettrostatico che si muove con l'elettrone, mentre il campo E2, H2, che è dovuto
all'accelerazione, è un campo di radiazione. A distanze grandi dall'elettrone il
campo di radiazione è predominante poiché esso si smorza più lentamente con la
distanza del campo elettrostatico. Possiamo infine calcolare l'energia irradiata
dalla carica in moto sotto forma di onde elettromagnetiche. La potenza irradiata P
sarà data dal flusso del vettore di Poynting S attraverso una superficie chiusa S
che circonda la carica. Considerando per semplicità una sfera di raggio R con il
centro nella posizione della carica all'istante t - R/c, avremo:
Tenendo conto delle espressioni (15.42) per il campo di radiazione E2, H2 si
trova, con qualche calcolo che per semplicità tralasciano, il risultato finale:
(15.43)
da cui si vede come la potenza irradiata sia proporzionale al quadrato
dell'accelerazione della particella carica.
15.5 Dinamica Relativistica
15.5.1 Generalizzazione relativistica dell'equazione di Newton
La legge fondamentale della dinamica prerelativistica è, come si è detto a suo
tempo (cfr. paragrafo 15.3), covariante (anzi invariante) rispetto ad una
252
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
trasformazione galileiana, ma non covariante rispetto a una trasformazione
lorentziana. La dinamica relativistica dovrà quindi essere fondata su leggi diverse
da quelle della dinamica newtoniana, pur dovendosi in pratica ridurre a questa per
velocità piccole rispetto a quella della luce.
Anzi in un sistema di riferimento nel quale il punto materiale è a riposo varrà
esattamente l'equazione :
(15.44)
della dinamica newtoniana (equazione del moto incipiente).
Si pone pertanto il problema di cercare quali modifiche si debbono apportare
alla (15.44) onde renderla covariante rispetto a una trasformazione di Lorentz.
Dato che il problema, nel suo caso più generale, è piuttosto complesso, ci
limiteremo a considerare il caso di particolare interesse fisico di una particella di
carica e sottoposta all'azione di un campo elettromagnetico caratterizzato dai
vettori E e B.
Nella meccanica newtoniana tale equazione si scrive:
(15.45)
essendo:
la quantità di moto della particella.
Già sappiamo come si trasformano, rispetto a una trasformazione di Lorentz le
varie grandezze che compaiono nella (15.45) all'infuori della quantità di moto p e
in particolare della massa che in essa compare.
Per trovare l'espressione relativistica di p = m0v in un sistema in moto
ricorreremo allo studio dell'urto fra due particelle sulla base delle leggi di
trasformazione delle velocità che già abbiamo stabilito nella cinematica
relativistica come conseguenza della trasformazione di Lorentz.
15.5.2 Massa relativistica di una particella
Come si è visto nel paragrafo 15.3.7, nella teoria einsteiniana il teorema di
composizione delle velocità della meccanica newtoniana risulta modificato ed
espresso dalle formule (15.28).
Ciò implica una variazione anche dei teoremi che regolano l'urto fra le
particelle. Vogliamo ora mostrare come tale variazione porti sostanzialmente a un
risultato di notevole importanza: la massa di un corpo dipende dalla sua velocità e
quindi risulta diversa in riferimenti inerziali in moto relativo l'uno rispetto l'altro.
Consideriamo l'urto frontale fra due particelle elastiche identiche ed
esaminiamo l'evento in due sistemi di riferimento S ed S', con S' che trasla rispetto
ad S con velocità w diretta lungo l'asse x. Si scelga il sistema S' in modo che
15.5]
DINAMICA RELATIVISTICA
253
in esso le due particelle si muovano con velocità v' e - v' parallelamente all'asse x.
Nel sistema S esse, prima dell'urto, avranno velocità rispettivamente v1 e v2. Allo
scopo di non introdurre a priori alcuna restrizione su un'eventuale dipendenza della
massa dalla velocità, denoteremo in S la massa della prima parti-cella con ml e
quella della seconda con m2.
Nell'urto dovranno conservarsi la massa totale M del sistema costituito dalle due
particelle e la quantità di moto totale.
Scrivendo tali reazioni nel sistema S avremo:
(15.46)
avendo denotato V la velocità comune in S delle due particelle all'atto dell'urto che
corrisponde alla velocità zero in S'.
Le formule relativistiche ((15.28) di paragrafo 15.3) per la composizione delle
velocità ci daranno quindi per il fenomeno in esame (essendo nel nostro caso v'1 =
v' e v2= - v'):
(15.47)
Eliminando M, v1 e v2 dalle (15.46) e (15.47) otteniamo:
Tenendo presente la relazione (15.29) di paragrafo 15.3.7 che lega i moduli delle
velocità v e v' di un punto misurate in due sistemi di riferimento S e S' in moto
relativo l'uno rispetto all'altro con velocità w si trova per il nostro caso:
Dividendo la seconda per la prima e semplificando si ha immediatamente:
(15.48)
Essendo le particelle identiche esse avranno in un sistema a riposo la stessa
massa m0. La (15.48) esprime pertanto che la massa di una particella in un
riferimento
254
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
rispetto al quale si muove con velocità v è inversamente proporzionale al fattore
1 − v 2 / c 2 . In altri termini possiamo dire che la massa m di una particella dipende
dalla sua velocità v conformemente alla relazione
(15.49)
dove m0 rappresenta la massa a riposo della particella.
Nella teoria di Einstein si arriva dunque a questo risultato nuovo : la massa di
una particella, da intendere ovviamente come misura della sua inerzia, è funzione
della velocità; tale funzione è rappresentata graficamente in Fig. 15.13. Come si
vede da questa figura, per velocità piccole rispetto a c (β2 « 1), la massa m della
particella è quasi costante e praticamente coincide con la massa propria o
intrinseca m0, vale a dire con la massa a riposo: si noti che la differenza relativa fra
massa della particella in moto e massa a riposo non supera il milionesimo finché la
velocità non supera i 400 km/s. La massa a riposo è pertanto la massa della
particella della meccanica newtoniana. Col crescere della velocità la massa
d'inerzia aumenta e tende a diventare ∞ per v → c: questa circostanza illumina un
altro aspetto del carattere di valore limite che ha, come già abbiamo più volte
riscontrato nello studio della cinematica (paragrafo 15.3) la velocità della luce nella
teoria della relatività. Vedremo a suo tempo come la (15.49) sia suscettibile di
un'accurata verifica sperimentale.
FIG.
15.13 - Dipendenza della massa dalla velocità.
15.5.3
Equazione del moto di una particella carica in un campo elettromagnetico.
Espressione dell'energia cinetica
Sulla base dei risultati precedenti assumeremo come equazione relativistica di
una particella carica in un campo elettromagnetico la seguente:
(15.50)
15.5]
DINAMICA RELATIVISTICA
255
dove:
Si può verificare che applicando una trasformazione di Lorentz e tenendo
presente le leggi di variazione di t (paragrafo 15.3.5), di v (paragrafo 15.3.7) e di
E, B (paragrafo 15.4.1) la (15.50), valida in un sistema inerziale S, si trasforma in
un'altra per il sistema S' della stessa forma.
Vogliamo studiare ora alcune conseguenze dell'equazione (15.50) che,
ponendo al solito:
(15.51)
si scrive:
Come nella meccanica prerelativistica, definiremo la potenza P della forza F
come:
P = F ⋅ v.
Dalla (15.51) si ha, data l'ortogonalità dei vettori v e v × B:
P = F ⋅ v = eE ⋅ v,
(15.52)
cioè la potenza esercitata dalla sola forza elettrica (il campo magnetico non
compie alcun lavoro).
Per l'equazione (15.50) della dinamica si ha inoltre:
da cui con facili passaggi algebrici:
Si conclude quindi che il lavoro elementare dL è il differenziale esatto della
quantità mc2. Integrando fra t1 e t2 si ha:
(15.53)
256
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Questa relazione si può mettere sotto una forma identica a quella che esprime
nella dinamica newtoniana il teorema della energia cinetica. A questo scopo
assumeremo per l'energia cinetica relativistica la seguente espressione:
dove K è una costate che potremo scegliere in modo che per v = 0 si abbia T = 0.
Sarà perciò K= - m0c2 e di conseguenza l'espressione relativistica dell'energia
cinetica sarà la seguente:
(15.54)
È facile verificare che per v « c questa espressione si riduce a quella consueta
della meccanica newtoniana. Infatti, tenendo presente lo sviluppo in serie di
potenze di β2 dell'espressione (1 — β2)-1/2, e cioè
si ha approssimativamente:
Si osservi che, secondo la (15.54) l'energia cinetica di un punto materiale va
crescendo e tende a ∞ per v → c : ciò significa che per imprimere ad un corpo la
velocità c occorre spendere un lavoro ∞, fatto questo in evidente relazione col
carattere di velocità limite posseduto nella teoria della relatività della velocità
della luce.
Con la espressione (15.54) dell'energia cinetica, la (15.53) si scrive:
e cioè: il lavoro eseguito dalle forze elettromagnetiche sulla particella in moto
operando per un intervallo di tempo t2 - tl è eguale alla variazione dell'energia
cinetica della particella nello stesso intervallo di tempo. La (15.53) esprime
dunque, come avevamo detto, la generalizzazione relativistica del noto teorema
dell'energia cinetica o delle forze vive.
15.5.4 Massa ed energia
Dall'espressione (15.54) dell'energia cinetica si può ricavare:
15.5]
DINAMICA RELATIVISTICA
257
che esprime come, nella teoria della relatività, l'acquisto da parte di un corpo di
un'energia cinetica T si manifesti come un incremento della massa inerziale da m0
a m. In altri termini si può dire che all'energia cinetica T posseduta da un corpo è
legata una massa T/c2. Se si tiene poi presente che l'energia cinetica T può
trasformarsi in altre forme di energia (potenziale, termica, elettromagnetica,
chimica, ecc.), appare del tutto spontaneo generalizzare il risultato dianzi ottenuto
affermando che a una quantità di energia E corrisponde, in qualunque forma essa
si manifesti, una massa m legata ad E dalla relazione:
(15.55a)
Ciò induce, in modo del tutto naturale, ad associare una massa, e quindi
un'inerzia, ad ogni forma di energia e ad assumere che reciprocamente ad una
massa qualsiasi, in moto o a riposo, sia associata una quantità di energia data da
E = mc2. In particolare un corpo a riposo di massa m0 possiede un contenuto di
energia, detta intrinseca, pari a m0c2. La conseguenza immediata di una siffatta
concezione è che ad ogni variazione ΔE dell'energia di un corpo, comunque
questa possa venir provocata (per mezzo di effetti cinetici, di fenomeni elettrici,
magnetici, termici, chimici, ecc.), ci si deve attendere una corrispondente
variazione della massa complessiva del corpo data da:
(15.55b)
Tale variazione di massa è in generale estremamente piccola ed in pratica
trascurabile. Infatti dalla relazione scritta discende che ad una variazione
energetica di un Joule corrisponde una variazione di massa pari a ~ 1,1 ⋅ 10-12 g.
Inversamente alla massa a riposo anche piccolissima di una particella corrisponde un contenuto energetico enorme ; infatti, sempre in virtù della relazione
(15.55) la massa di un grammo risulta equivalente a ben 9 ⋅ 1020 erg = 9 ⋅ 1013
joule.
Si osservi che dalla relazione tra massa ed energia deriva che anche quando
non entrano,in gioco velocità così elevate da rendere sensibile l'influenza del
fattore 1 / 1 − β 2 , in un sistema isolato tali grandezze (non relativistiche) M0, E
non si conservano separatamente come si ammetteva nella teoria prerelativistica,
ma ciò che resta costante attraverso tutte le trasformazioni è la combinazione M0
c2 + E (principio generalizzato dalla conservazione dell'energia).
Si noti ancora che l'equivalenza, come impropriamente si suoi dire, tra massa
ed energia comporta pure che al propagarsi di una certa energia E con velocità v è
necessariamente associata una quantità di moto:
(15.56)
258
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Una relazione di questo tipo era d'altronde già nota, come conseguenza della
teoria di Maxwell, nello studio della propagazione dell'energia posseduta dalle
onde elettromagnetiche; risultato questo che appare ora come un caso particolare
di un teorema del tutto generale.
15.5.5
Verifiche sperimentali
a) Dipendenza della massa dalla velocità. È possibile, mediante esperienze
dirette, verificare la legge relativistica della dipendenza della massa dalla velocità.
I vari dispositivi usati nelle numerose esperienze eseguite a questo riguardo sono
sostanzialmente gli stessi che vengono usati per la determinazione della carica
specifica dell'elettrone. Osserviamo esplicitamente che la possibilità di
determinare la dipendenza della massa dell'elettrone in moto dalla velocità, con
esperienze di questo tipo, si fonda sull'ipotesi che la carica elettrica e dell'elettrone sia una grandezza invariante.
Tutti i metodi usati prima del 1940, tra i quali ricordiamo quello ben noto delle
parabole di J. J. Thomson, per la determinazione della variabilità della massa
dell'elettrone in funzione della sua velocità erano però affetti da un certo errore
dovuto soprattutto al fatto che, usandosi per la deflessione delle parti-celle un
condensatore piano a facce parallele, la focalizzazione era piuttosto scarsa;
sebbene quindi i risultati permettessero di affermare con certezza che la massa
dell'elettrone è una funzione crescente della velocità, l'incertezza dei valori
misurati era tale da non permettere di verificare se tale funzione fosse quella
espressa dalla formula di Einstein o quella espressa dall'altra formula proposta da
Abraham:
e che ebbe storicamente una notevole importanza.
Solo nel 1940 fu ideato (da M. M. Rogers, Reynolds e F. T. Rogers) un
metodo di misura più preciso; la differena importante tra questo metodo ed i
precedenti sta nell'uso di un campo elettrico radiale piano, realizzabile con
notevole perfezione grazie ad una tecnica messa a punto soprattutto per opera di
Dempster, che permette una migliore messa a fuoco.
In linea di principio l'esperimento non differiva però dagli schemi consueti;
ossia, si misuravano le deflessioni di un fascette di particelle cariche (in questo
caso elettroni) prima in un campo magnetico costante, poi nel campo elettrico
radiale. Le misure venivano eseguite su fasci di raggi β del Ra (B + C) che emette
elettroni di tre energie diverse e ben definite. L'accurata precisione con cui erano
realizzate le varie parti del dispositivo sperimentale di Rogers permetteva una
precisione dell'ordine dell'1 %. I risultati ottenuti per le tre energie degli elettroni
emessi dal Ra(B + C) sono rappresentati in Fig. 15.14.
Dall'esame di questa si vede chiaramente come i punti sperimentali giacciano
sulla curva tracciata in base alla formula di Einstein; inoltre la differenza fra i
valori dati da questa curva e quelli dati dalla curva che corrisponderebbe alla
formula di Abraham supera di circa 10 volte l'errore sperimentale.
15.5]
FIG. 15.14
DINAMICA RELATIVISTICA
259
- Verifica sperimentale della dipendenza della massa dalla velocità.
Le esperienze di M. M. Rogers, Reynolds e F. T. Rogers provano quindi entro
i limiti degli errori sperimentali (che come abbiamo detto non superano l' 1%),
che (almeno per gli elettroni) la legge di variazione della massa con la velocità è
quella prevista dalla teoria della relatività.
Ulteriori verifiche sono state eseguite usando fasci di elettroni monocromatici
prodotti in macchine acceleratrici (ad esempio betatroni).
b) Bilancio energia-massa nelle reazioni nucleari. Una verifica sperimentale del
principio generale di equivalenza massa-energia è stata conseguita nello studio di
numerose reazioni nucleari nelle quali si conosce, attraverso misure dirette
(eseguite con lo spettrografo di massa), la massa delle particelle reagenti e nelle
quali l'energia (sviluppata od assorbita) ha pure potuto essere misurata
direttamente. Prenderemo ad esempio una reazione particolarmente semplice ma
assai comune, del tipo:
(15.57)
denotando con A0 il nucleo urtato, A1 la particella urtante, A3 il nucleo residuo ed
A2 la particella emessa. Indicando con E0, El, E2, E3 le energie cinetiche delle
varie particelle in gioco nel sistema del centro di massa, avremo per l'energia
liberata nella reazione:
(15.58)
Questa grandezza, secondo la concezione einsteiniana dell'equivalenza tra
massa ed energia, dovrà essere legata alla differenza ΔM fra le masse a riposo
delle particelle al primo membro e quelle delle particelle al secondo membro della
(15.57) dalla relazione:
(15.59)
260
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
Considereremo particolareggiatamente la reazione nucleare:
(15.60)
che permette la verifica della (15.59) con un'incertezza che comporta un errore
inferiore all'1 %.
Tale reazione è stata ottenuta per la prima volta da Crockroft e Walton
bombardando il litio con protoni accelerati mediante l'applicazione di un campo
elettrico generato da una d.d.p. di qualche centinaio di migliaia di volt. Il
dispositivo sperimentale per lo studio di tale reazione è schematicamente il
seguente : un fascio di protoni (provenienti da un acceleratore elettrostatico)
incide su una lastra di litio e sul cammino delle particelle a uscenti da questa è
interposto un foglio di mica a spessore variabile, per mezzo del quale si misura
l'assorbimento e quindi l'energia delle particelle. Infine una camera a
ionizzazione, collegata con un'amplificatore, permette di misurare il numero delle
particelle stesse. Dai valori dell'energia cinetica delle particelle a si deduce:
D'altra parte le masse delle particelle in gioco nella relazione sono ben note
attraverso misure dirette per mezzo dello spettrografo di massa. Si ha precisamente (esprimendo le masse in unità atomiche):
Alla reazione (15.60) è pertanto associata una variazione di massa pari a
0,01858, cioè, in conseguenza della relazione di equivalenza (15.59), pari a 17,27
MeV; questo coincide con uno scarto di circa l'1 % col valore misurato di Q.
Si conoscono oggigiorno numerose reazioni nucleari, che permettono la
verifica sperimentale della relazione di Einstein con un errore probabile di
qualche % ; alcune di queste sono riportate nella Tabella 15.1.
Tabella 15.1.
Tipo di
reazione
Nuclei
iniziali
α-p
F
19
9 +
p-α
L
p-γ
ΔM.c2
Nuclei
finali
(MeV)
Q
(MeV)
α
Ne
22
10
+p
1.53
1.58
7
3
+p
He
4
2
+α
17.27
17.13
L
7
3
+p
Be
8
4
+γ
17.12
17.1
d-α
O
16
8 +
d
N
14
7 +
α
3.11
3.13
d- p
N
14
7 +
d
N
15
7 +
p
8.57
8.55
n-γ
H 11 + n
+γ
2.20
2.237
H
2
1
15.5]
DINAMICA RELATIVISTICA
261
Concludendo possiamo affermare che il confronto fra l'energia sviluppata nelle
reazioni nucleari e le differenze di massa ottenute per mezzo di misure con lo
spettrografo di massa costituisce una verifica sufficientemente precisa del
principio di equivalenza tra massa ed energia.
c) Verifiche globali dell'equazione della dinamica. Tutta la teoria della relatività
ristretta, ed in particolare le equazioni relativistiche del moto di una carica in un
campo elettromagnetico, trovano la conferma più evidente e sensazionale nel
ruolo fondamentale che esse hanno ormai assunto in due campi della tecnica:
quello dell'elettronica e quello delle macchine acceleratrici.
Infatti sia nel funzionamento di tubi elettronici di vario tipo (tubi a raggi
catodici, valvole termoioniche, magnetron, klystron, ecc.) sia nella progettazione
delle grandi macchine acceleratrici (betatroni, sincrotroni, ciclotroni, acceleratori
lineari di risonanza, ecc.), che vengono impiegate nei laboratori di ricerca,
tecnologici e medicali, allo scopo di accelerare ioni ed elettroni fino ad imprimere
loro velocità corrispondenti a tensioni acceleratrici di diverse decine di GeV, è
necessaria la considerazione delle leggi relativistiche della meccanica e
dell'elettromagnetismo.
15.5.6 Cenno alla teoria della relatività generale
La teoria della relatività ristretta permette la descrizione dei fenomeni
meccanici ed elettromagnetici per mezzo di leggi valide in tutti i sistemi di
riferimento inerziali (e quindi in assenza di gravitazione) e dotati di moto relativo,
l'uno rispetto all'altro, rettilineo e uniforme.
Successivamente Einstein ha generalizzato la sua teoria in modo da renderla
adatta alla descrizione anche dei fenomeni gravitazionali ed alla formulazione di
leggi valide qualunque sia il moto del sistema di riferimento; tale estensione
costituisce la cosiddetta teoria della relatività generale. In questa i fenomeni fisici
sono descritti in un cronotopo la cui metrica non è più caratterizzata da un ds2
pseudoeuclideo, ma da una forma più generale del tipo:
i cui coefficienti gαβ funzioni a priori qualunque del punto cronotopico, sono
determinati dalla distribuzione di materia. In essa tutti i sistemi di riferimento
sono equivalenti per una formulazione delle leggi della natura, indipendentemente
dalla presenza di un campo gravitazionale o dal loro moto relativo comunque
vario. In altri termini nella teoria della relatività generale le leggi fisiche devono
esprimersi per mezzo di formule covarianti rispetto a trasformazioni generali di
coordinate che fanno passare da un sistema di riferimento qualsiasi ad un altro
pure qualsiasi.
La teoria della relatività ristretta si presenta come un caso limite di quella
generale, quando i campi gravitazionali diventano di intensità trascurabile ed il
moto relativo dei sistemi di riferimento diventa rettilineo ed uniforme.
262
CENNI SULLA TEORIA DELLA RELATIVITÀ RISTRETTA
[CAP. 15
La teoria della relatività generale ha trovato a tutt'oggi brillanti conferme
sperimentali specie nello studio di fenomeni astronomici.
Essa ha dato la spiegazione dello spostamento del perielio di Mercurio, che era
stato osservato prima della formulazione della teoria stessa; ha previsto l'esistenza
di uno spostamento delle righe spettrali della luce originata in stelle dense (ad
esempio la luce proveniente dalla compagna di Sirio) e l'esistenza di una
deflessione, per l'effetto di campi gravitazionali (come quello del Sole), di un
raggio di luce che propaghi nello spazio: anche questi due effetti sono stati
accuratamente verificati. Oggigiorno il progredire della tecnica sperimentale
(applicazione dell'effetto Mössbauer) ha permesso la verifica dello spostamento
gravitazionale anche per mezzo di esperienze terrestri, nelle quali si misura
l'effetto su tale spostamento delle piccole variazioni che il campo gravitazionale
subisce passando, ad esempio, dal livello del mare ad un'altezza di qualche decina
di metri.
INDICE ANALITICO
Ago magnetico, 10, 29
Alnico, 66
Ammettenza, 134
Ampère,
principio di equivalenza di-, 12, 29
teorema di-, 29, 48, 148
Ampiezza di banda, 140
Argand, grafici di, 129
Autoinduttanza, 94
- di un solenoide, 94
- di due cilindri coassiali, 95
Biot Savart, legge di, 16
Campo magnetico,
- di una spira, 20
-di un filo, 15, 18
-di un solenoide, 21
- di un materiale, 53
- molecolare, 72, 83
nel vuoto, 3
Cariche magnetiche, 11
Cavo coassiale, 187, 191
Circuiti
forze tra -, 24
- in corrente alternata, 123-145
-in corrente continua, 101-112
Circuito,
-adattato, 112
costante di tempo di un-, 115, 117
-elettrico, 101
forza agente su un -, 5
frequenza propria di un -, 138
- magnetico, 62
- oscillatorio smorzato, 120
potenza dissipata in un-, 143
- RC in serie, 116
- RL in serie, 113
- RLC in serie, 118, 135
- smorzato, 120
- sovrasmorzato, 119
Coefficiente di propagazione, 169, 198
Coefficiente di smorzamento, 170
Condizioni al contorno, 49, 174
Continuità, equazione di, 148
Coppia magnetica, 8
Corrente alternata, 123-145
ampiezza di una-, 124
fase di una-, 124
potenza efficace di una -, 145
pulsazione di una -, 144
valore istantaneo di una -, 124, 126, 130
Corrente istantanea, 113
Corrente di polarizzazione, 151
Corrente di spostamento, 149
Corrente indotta, 89
Correnti atomiche, 38
Cronotopo, 238
Curie,
legge di -, 82
temperatura di -, 86
Curie, Weiss, legge di, 86
Dalembertiano, 160
Demagnetizzazione,
264
INDICE ANALITICO
campo di -, 67
curva di -, 62, 69
Diagramma stazionario, 128
Diamagnetismo, 56, 72
origine del -, 74
Dilatazione temporale, 227, 229
Dinamica relativistica, 251
Dispersivo, mezzo, 165
Doppler, effetto, 233
- longitudinale, 234
- trasversale, 234
Einstein, principio di relatività di, 219
Elettrodinamica relativistica, 244
Elettromagnetica, quantità di moto, 153, 170
Elettrone,
moto di un - in campo magnetico, 13
radiazione di un - in moto, 181, 247
Energia,
- cinetica relativistica, 256
conservazione dell'-, 152
-elettromagnetica, 153, 170
- intrinseca, 257
- magnetica, 97
densità di - magnetica, 98
Equifase, superficie, 167
Equivalenza massa-energia, 257, 259
Etere, 210, 217, 219
Faraday, Neumann, legge di, 90
Fasore, 126
Fattore di qualità, 138
Ferromagnetismo, 56, 57, 72, 82
Fizeau, esperienza di, 216, 243
Flusso disperso, 62
Forza,
-coercitiva, 61
- controelettromotrice, 113
- elettromotrice indotta, 90
-elettromotrice variabile, 126
- magnetica motrice, 63
Galileo, trasformazioni di, 204, 207, 225
Gauss, grafici di, 129
Generatore,
- ideale di corrente, 102
- ideale di tensione, 102
Guida d'onda, 196
Henry, definizione dell', 16, 94
Invarianza della lunghezza, 207
Impendenza, 131
- in parallelo, 133
- in serie, 133
Impendenza caratteristica, 195
Inerziale sistema, 201, 205, 219
Induzione elettromagnetica, 89
Induzione magnetica,
definizione del vettore -, 3, 6, 9
flusso dell'-, 33
flusso tagliato dell'-, 92
flusso concatenato dell'-, 92
linee di forza dell'-, 15, 34, 63, 68
Induzione residua, 61
Intensità magnetica, definizione del vettore,
48
Isteresi, ciclo di. 57
Ives e Stilwell, esperienze di, 235
Kirchhoff, leggi di, 103, 113, 134
Lamina magnetica, 12
Langevin, funzione di, 81, 84
Laplace,
prima formula di -, 17
seconda formula di -, 7
Larmor, frequenza di, 76
Legge di,
-Biot e Savart, 16
-Curie, 82
- Curie-Weiss, 86
- Faraday-Neumann, 90
-Kirchhoff, 103, 113, 134
-Lenz, 90
-Snell, 179
Lenz, legge di, 90
Lienard-Wickert,
potenziali di - per l'elettrone, 183, 250
Lorentz,
equazioni di -. 156
forza di -, 4
trasformazione di -, 211,222, 225, 236, 244
Luce,
costanza della velocità della -, 221, 223
INDICE ANALITICO
propagazione della -, 220, 223
velocità della -, 162
Lunghezza d'onda critica, 199
Maglia, 104
- indipendente, 106
metodo delle correnti di -, 106
Magneti permanenti, 66
Magnetizzazione,
corrente di -, 41, 43
curva di -, 60
densità di corrente di -, 45, 46
- di saturazione, 60
- per orientamento, 72, 80
- residua, 85
vettore intensità di -, 40
Magnetostatica
- nel vuoto, 1-37
- nella materia, 39-87
Massa,
- a riposo, 253
relativistica, 254
Masse magnetiche, 11
Maxwell, equazioni di, 147, 150, 160, 210,
244
Mesone, vita media del, 230
Michelson, esperimento di, 211, 218, 241
Minkowski, spazio di, 238
Momento magnetico,
- di spin, 40, 71
- di un ago magnetico, 11
- di una spira, 9, 29, 37
- di un atomo, 79, 82
- di un elettrone, 74
-orbitale, 40, 71
-proprio, 71, 80
Mutua induttanza, 96
Mutua resistenza, 108
Newton, equazione di, 201, 203, 208, 211,
251
Nodi, metodo dei, 109
Nodo, 104
Numero complesso, 129
Onda,
- convergente, 179
- emergente, 179
energia di un'-, 170
fase di un'-, 167
-incidente, 195
intensità di un'-, 172
-monocromatica, 166
-piana, 160, 169
- polarizzata rettilinearmente, 165
- progressiva, 161
quantità di moto di un'-, 170
- regressiva, 161
-riflessa, 195
- sinusoidale, 165
- trasversale elettrica, 197
-trasversale magnetica, 197
-velocità di un'-, 162
Onde,
equazioni delle -, 158
- in guida d'onda, 196
-in un cavo coassiale, 187, 194
-in un conduttore, 158, 169
-in un isolante, 159, 160
riflessione delle -, 176
rifrazione delle -, 176
Oscillazioni,
- forzate, 136
- smorzate, 120
Paramagnetismo, 56, 72
origine del -, 80
Permeabilità magnetica,
- del vuoto, 16
- dì un materiale, 57, 58, 61, 63
relativa, 57
Piano d'incidenza, 177
Polarizzabilità magnetica, 74, 80, 82
Poli di una calamita, 52, 68
Poli magnetici, 12, 42, 51
densità superficiale di -, 52
densità volumetrica di -, 52
Potenza, 143
fattore di -, 143
Potenziale,
- scalare, 156
- scalare magnetico, 26, 28
-vettore magnetico, 34, 35, 156
Potenziali ritardati, 158, 183, 248
Poynting, vettore di, 152
Pressione elettromagnetica, 172
Propagazione guidata, 187
265
266
INDICE ANALITICO
Radiazione,
campo di -, 250
- di una carica accelerata, 181, 247
Ramo, 103
metodo delle correnti di -, 105
Reattanza, 133
-capacitiva, 133
-induttiva, 133
Reciprocità del moto, 204, 223
Reciprocità, teorema di, 108
Relatività,
principio di - galileiana, 202, 208
principio di - einsteiniana, 218
- ristretta 201-262
Rifrazione, indice di, 164
Riluttanza, 63
- in parallelo, 66
in serie, 65
Risonanza, 138
Rossi e Hall, esperienza di, 232
Sovrapposizione, teorema di, 108
Spazio-tempo, 238
Spostamento gravitazionale, 262
Stelle doppie, 214
Stelle fisse, sistema delle, 203
Suscettività magnetica, 56, 74, 80, 82, 86
Schermaggio magnetico, 66
Simultaneità, 220, 221
Snell, legge di, 179
Solenoide, 21, 23, 95, 97
Weber, definizione del, 5
Weiss
costante di -, 84
campo molecolare di -, 84
Tempo
-assoluto, 204
universale, 203
Thevenin, teorema di, 110
Traferro, 64
Transitorio, comportamento, 112
Valori efficaci, 143
Velocità, composizione delle, 207, 236
Vettore di propagazione, 168
Vettori ruotanti, 126, 137
")