Dispensa n. 2 del corso di
PLANETOLOGIA
(Prof. V. Orofino)
LA DINAMICA DEL SISTEMA SOLARE
Università del Salento
Corso di Laurea Magistrale in Fisica
A.A. 2011-2012
Ultimo aggiornamento: Agosto 2011
1. Introduzione
Se un corpo del Sistema Solare risentisse della sola interazione gravitazionale
con il Sole, esso si muoverebbe intorno alla nostra stella su traiettorie (orbite
kepleriane) descritte esattamente dalle leggi di Keplero. Un tale moto, conforme alla
soluzione del problema dei due corpi, si chiama moto non perturbato. Tuttavia
ciascun corpo del Sistema Solare risente non solo dell’attrazione solare, ma anche di
quella di tutti gli altri corpi in orbita intorno al Sole. Come conseguenza di ciò, nessun
membro del Sistema Solare si muove su una traiettoria rigorosamente iperbolica,
parabolica, ellittica né tanto meno circolare. Le deviazioni delle reali traiettorie dei
corpi rispetto alle orbite kepleriane vengono chiamate perturbazioni ed il moto è detto
perturbato.
In questa dispensa verranno trattati gli aspetti fondamentali della teoria delle
perturbazioni gravitazionali, con particolare riguardo per il problema ristretto dei tre
corpi, di cui vengono presentati diversi esempi, tra cui l’effetto fionda utilizzato nelle
missioni spaziali. Sono infine discussi altri meccanismi perturbativi, stavolta non
gravitazionali, che influiscono marcatamente sul moto orbitale di piccoli corpi intorno
al Sole. Un’altra importante applicazione del problema dei tre corpi, ossia la teoria
statica e dinamica delle maree, sarà invece trattata in dettaglio nella prossima
dispensa.
2. Perturbazioni gravitazionali: problema dei tre corpi
Le perturbazioni dei corpi del Sistema Solare sono in genere alquanto
complicate e non è per niente facile tenerne conto. Tuttavia il processo perturbativo
può essere compreso nei suoi aspetti fondamentali tramite il seguente esempio.
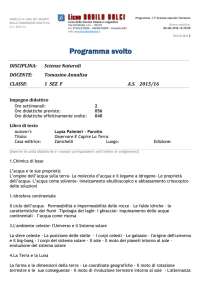
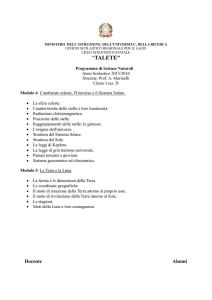
Consideriamo tre corpi celesti: il Sole S di massa M; il pianeta P di massa mP
posto ad una distanza r dal centro del Sole; ed il corpo C di massa mC posto ad una
distanza rS dal centro del Sole ed rP dal centro del pianeta P (v. fig. 1).
Tutti e tre i corpi esercitano gli uni sugli altri interazioni gravitazionali
descritte dalla legge di attrazione universale di Newton. La descrizione cinematica di
questo sistema costituisce un tipico esempio del cosiddetto problema dei tre corpi. In
base alla teoria del problema dei due corpi, il moto del sistema Sole-corpo può essere
trattato considerando il Sole fisso nell’origine O di un sistema di riferimento inerziale
2
ed il corpo C, di massa pari alla massa ridotta μ del sistema, in orbita intorno al Sole
per effetto di una forza:
r
M mC
r
rˆS ,
F = μ aS = − G
rS2
dove r̂S è il versore diretto da S a C.
Fig. 1 – Geometria del problema dei tre corpi
In altre parole l’interazione gravitazionale con il Sole fa sì che il corpo sia
dotato di un’accelerazione:
M mC
M + mC
r
aS = − G
rˆS = − G
rˆS .
2
rS2
μ rS
(1)
D’altra parte, a causa della presenza del pianeta P, il corpo risulta dotato anche
di un’accelerazione:
m
r
a P = − G P2 r̂P ,
rP
(2)
3
(dove r̂P è il versore diretto da P a C) dovuta appunto all’interazione gravitazionale
del corpo con il pianeta.
Inoltre, per effetto dell’attrazione gravitazionale del pianeta con il Sole,
quest’ultimo risente di una forza:
r
M mP
r
r̂
F0 = M a 0 = − G
r2
(dove r̂ è il versore diretto da P ad S) che produce un’accelerazione:
m
r
a 0 = − G 2P r̂ .
r
(3)
Ovviamente il Sole è dotato anche di un’accelerazione dovuta all’attrazione
gravitazionale esercitata dal corpo C, ma di questa si è già tenuto implicitamente
conto nello scrivere la (1).
Per l’osservatore inerziale in O il corpo è quindi soggetto ad un’accelerazione
risultante:
r
r r
a = aS + aP .
Volendo determinare la traiettoria del corpo rispetto al Sole, occorre fare
riferimento all’osservatore non inerziale solidale con S e pertanto dotato di
r
accelerazione a 0 rispetto ad O. In tale sistema non inerziale C è dotato di
un’accelerazione:
r
r r
r
r
r
r
v
a ′ = a − a 0 = a S + ( a P − a 0 ) = a S + a ′P .
(4)
Il primo addendo all’ultimo membro della (4) rappresenta l’accelerazione del moto
relativo dovuto soltanto all’attrazione solare; essa determina il moto kepleriano di C
intorno ad S. Il secondo addendo costituisce la cosiddetta accelerazione perturbatrice
che causa gli scostamenti del moto di C rispetto a quanto descritto dalle leggi di
Keplero. Essa è la differenza vettoriale tra l’accelerazione che il pianeta P imprime al
corpo in esame e quella con cui P agisce sul Sole. L’accelerazione perturbatrice è
associata alla forza perturbatrice data da:
4
r
r
FP = mC a ′P .
La fig. 1 mostra che nel caso generale la direzione dell’accelerazione
perturbatrice, e di conseguenza della forza perturbatrice, non è quella della retta PC
r
congiungente il corpo sotto esame con il corpo perturbatore. L’accelerazione a ′P
risulta diretta verso il corpo P responsabile della perturbazione solo nel caso in cui C
e P sono allineati con il Sole ed inoltre sono dalla stessa parte rispetto a quest’ultimo
(secondo l’ordine SCP o SPC).
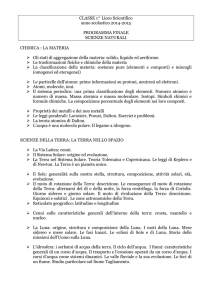
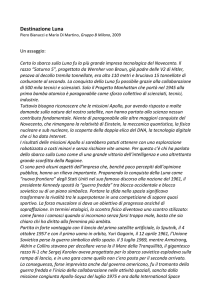
Il moto degli astri fa sì che il modulo e la direzione dell’accelerazione
perturbatrice varino continuamente nel tempo. Come si vede dalla fig. 2a, il massimo
valore del modulo dell’accelerazione perturbatrice si ha nel punto C1, ossia quando il
corpo viene a trovarsi tra S e P; in tal caso (v. fig. 2b) si può scrivere:
r
r
r
a ′P = a P − a 0 = − G
m
mP
rˆ + G 2P rˆ .
2
(r − rS )
r
Pertanto:
a ′P = − G
⎡
2 r rS − rS2
mP
mP
1
1 ⎤
ˆ
ˆ
+
r
=
G
m
−
=
G
m
. (5)
r
G
⎥
P ⎢
P
2
(r − rS ) 2
r2
r2 ⎦
(r − rS ) 2 r 2
⎣ (r − rS )
Se poi rS è piccolo rispetto ad r, allora la (5) assume la forma semplificata:
a ′P = G
2 rS m P
.
r3
(5’)
Nel punto C3 l’accelerazione comunicata dal pianeta al corpo secondario è quasi
esattamente la stessa di quella in C1, dal momento che risulta:
r
r
r
a ′P = a P − a 0 = − G
m
mP
rˆ + G 2P rˆ .
2
(r + rS )
r
da cui appunto:
5
a ′P = − G
2 r rS + rS2
2r m
mP
mP
ˆ
ˆ
r
+
G
r
=
G
m
≈ G S3 P .
P
2
2
2 2
(r + rS )
r
(r + rS ) r
r
Si vede quindi che in C1 e C3 l’accelerazione perturbatrice è inversamente
proporzionale non al quadrato ma al cubo della distanza del corpo perturbatore P dal
centro di forza S.
(a)
(b)
Fig. 2 – (a) Accelerazioni del Sole (S) e del corpo secondario (C) dovute all’interazione con il pianeta
perturbatore (P) in quattro punti dell’orbita di C intorno ad S. (b) Situazione geometrica nel punto C1
dove si ha la massima l’influenza gravitazionale del pianeta perturbatore.
3. Problema ristretto dei tre corpi e punti di Lagrange
Un importante caso particolare del problema dei tre corpi è il cosiddetto
problema ristretto dei tre corpi che si presenta quando uno dei corpi è molto meno
6
massivo degli altri due. Tale problema è particolarmente interessante poiché nel
Sistema Solare ci sono molti esempi che possono essere accuratamente descritti dal
problema ristretto dei tre corpi. Nel XVII secolo il matematico Joseph Lagrange ha
provato che, scelto un sistema di riferimento non inerziale con origine O nel centro di
massa del sistema dei due corpi maggiori C1 e C2 e corotante con essi intorno ad un
asse passante per O e perpendicolare al piano contenente i due corpi, esistono cinque
punti di equilibrio per il terzo corpo C3. In tali punti, cioè, la forza risultante
dall’attrazione combinata di C1 e C2 su C3 è esattamente bilanciata dalla risultante
delle forze fittizie (centrifuga e di Coriolis) dovute alla rotazione del sistema di
riferimento. In altre parole, se il corpo minore C3 fosse in uno di questi particolari
punti, detti punti di Lagrange, allora le mutue attrazioni gravitazionali esercitatesi tra i
tre corpi sarebbero tali da mantenere inalterate nel tempo le distanze reciproche tra di
essi. I primi tre punti di Lagrange, L1, L2 ed L3, sono posti sulla congiungente C1C2.
Gli altri due, L4 ed L5, coincidono invece con i vertici dei due triangoli equilateri C1
L4 C2 e C1 L5 C2.
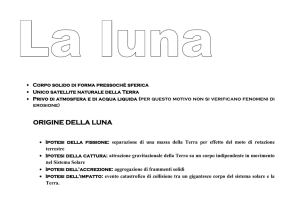
In fig. 3 sono riportati ad esempio i punti di Lagrange nel caso in cui i due
corpi maggiori sono il Sole e la Terra. In realtà i punti L1, L2 ed L3 (detti punti
coallineati) sono punti di equilibrio instabile, nel senso che un inizialmente piccolo
scarto dalla posizione di equilibrio tende ad aumentare esponenzialmente con un
tempo-scala che, ad esempio, nel caso del sistema Sole-Terra, è di circa 23 giorni per
i punti L1 ed L2 e di 150 anni per il punto L3. Al contrario i punti L4 ed L5 (detti punti
triangolari) sono punti di equilibrio stabile, a patto però che il rapporto tra le masse
dei due corpi maggiori soddisfi la condizione m1 /m2 > 25.
Questi due ultimi punti lagrangiani sono particolarmente importanti proprio
perché sono posizioni d’equilibrio stabile, se la precedente condizione è soddisfatta.
In altre parole un corpo C3 con massa molto minore degli altri due continua ad
orbitare intorno al corpo principale C1 come se il corpo perturbatore C2 non
esistesse: infatti in L4 ed L5 l’accelerazione perturbatrice si annulla.
Nel Sistema Solare esistono centinaia di oggetti collocati nei punti lagrangiani
triangolari L4 ed L5 di vari sistemi Sole-Pianeta o Pianeta-Satellite; essi sono detti
collettivamente troiani, poiché i primi ad essere scoperti sono stati appunto i Troiani,
un gruppo di asteroidi che prendono il loro nome da Ettore, il più grande corpo di
questa famiglia, e che orbitano intorno al Sole nei punti L4 ed L5 del sistema SoleGiove. Anche Marte, Nettuno e forse anche Urano possiedono i loro asteroidi troiani.
7
Non così Saturno, nel cui sistema esistono però satelliti troiani di alcune delle lune
maggiori. Finora non sono stati ancora scoperti, invece, asteroidi di tipo troiano del
sistema Sole-Terra.
Fig. 3 – Punti lagrangiani del sistema Sole-Terra
Sempre in tale sistema particolarmente degni di nota sono i tre punti
coallineati di Lagrange. Nel punto L1 la NASA ha collocato in orbita intorno al Sole il
satellite d’osservazione solare SOHO, proprio perché in questa posizione il Sole non
viene mai eclissato dalla Terra, mentre nel punto L2 saranno collocati diversi satelliti,
tra cui il Webb Space Telescope (il telescopio spaziale di nuova generazione che sarà
probabilmente lanciato nel 2018), appunto perché quella posizione offre riparo dalla
radiazione solare1. Al contrario dei primi due, il punto L3 non riveste alcuna
importanza pratica per i voli spaziali, a causa del fatto che esso rimane
permanentemente dietro al Sole, nascosto alla vista di qualunque osservatore terrestre.
Questa circostanza ha però sollecitato la fantasia degli scrittori di fantascienza i quali,
ignorando l’intrinseca instabilità dinamica dell’orbita di tale punto intorno al Sole,
(1): Ovviamente, siccome i punti L1 ed L2 sono punti di equilibrio instabile, questi satelliti, per
mantenere la loro orbita, avranno bisogno di periodiche correzioni d’assetto.In particolare il
Webb orbiterà ad alone attorno a L2, evitando di restare sull'asse Sole-Terra in modo da
potersi alimentare tramite i pannelli fotovoltaici.
8
hanno ipotizzato l’esistenza di un fantomatico pianeta, il Pianeta X, posizionato
proprio nel punto L3. Non sono pochi, infatti, i romanzi ed i film che parlano di
invasioni della Terra da parte degli ipotetici abitanti di tale pianeta.
4. Problema ristretto dei tre corpi (moto perturbato): esempi tipici
4.1 Il sistema Terra, Sole, Luna
Per la Luna, il corpo centrale (centro di forza) è la Terra, mentre il principale
corpo perturbatore è il Sole. In perfetta analogia con la (1), l’accelerazione della Luna
dovuta all’attrazione terrestre vale:
aT = G
mT m L
m +m
= G T 2 L ,
2
μ rT
rT
(6)
dove mT ed mL sono rispettivamente la massa della Terra e della Luna, μ è la massa
ridotta del sistema Terra-Luna, mentre rT è la distanza che separa i due corpi.
L’accelerazione della Luna dovuta all’attrazione solare è data invece da:
aS = − G
M
,
rS2
dove, come prima, M è la massa del Sole ed rS è la distanza della Luna dal Sole.
Confrontando queste due accelerazioni si trova che aS è due volte e mezzo più grande
di aT, e ciò sembrerebbe alquanto strano, visto che la Luna è legata
gravitazionalmente alla Terra e non al Sole. In realtà, come discusso nel paragrafo
precedente, l’accelerazione che perturba il moto della Luna rispetto alla Terra non è
solo quella dovuta all’attrazione solare, ma è la differenza vettoriale tra
l’accelerazione che il Sole imprime alla Luna e quella con cui il Sole agisce sulla
Terra. Il massimo valore di tale accelerazione perturbatrice, in analogia con la (5’), è
dato da:
a ′S = G
2 rT M
,
r3
(7)
9
dove r è la distanza Terra-Sole; si noti che tale distanza è molto maggiore della
distanza Terra-Luna rT, per cui ha senso applicare la (5’). Confrontando la (7) con la
(6) si vede che:
2 rT M
3
3
a ′S
2 M ⎛ rT ⎞
r
=
=
⎜ ⎟ ∼ 0.011,
mT + m L
aT
mT + m L ⎝ r ⎠
rT2
ossia l’accelerazione perturbatrice solare è circa 1/90 di quella dovuta all’attrazione
terrestre. E ciò spiega appunto perché la Luna risulta legata gravitazionalmente alla
Terra e non al Sole.
4.2 Il sistema Sole, Giove, Terra
Il moto della Terra intorno al Sole è perturbato da tutti gli altri pianeti, ma tra
questi quello che esercita l’azione di gran lunga più importante è Giove, il pianeta più
massivo del Sistema Solare. Utilizzando la (5’) e la (1), dove stavolta rS è la distanza
Terra-Sole, r è la distanza Giove-Sole, mentre mP ed mC sono rispettivamente la
massa di Giove e della Terra, si ricava che:
2 rS m P
3
3
2 m P ⎛ rS ⎞
a ′P
r
=
=
⎜ ⎟ ∼ 1.4 × 10-5 .
M + mC
aS
M + mC ⎝ r ⎠
2
rS
In altre parole il modulo dell’accelerazione perturbatrice in questo caso è di diversi
ordini di grandezza inferiore rispetto a quello dell’accelerazione dovuta all’attrazione
solare. In effetti l’orbita della Terra, e più in generale di un qualunque altro pianeta,
subisce perturbazioni gravitazionali abbastanza lievi e quindi si scosta relativamente
poco dall’orbita puramente kepleriana. Tuttavia anche queste blande perturbazioni,
integrate nel tempo, possono dare luogo ad effetti tutt’altro che trascurabili.
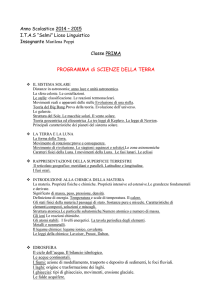
Un primo effetto è una variazione periodica dell’eccentricità dell’orbita
attorno al suo valor medio. Un altro effetto riguarda una precessione del piano orbitale
rispetto al piano dell’equatore celeste, che comporta una lenta rotazione della linea
degli equinozi in verso opposto a quello del moto orbitale e dà luogo al ben noto
fenomeno della precessione degli equinozi. Infine si ha anche una precessione del
10
semiasse maggiore dell’orbita (cioè una rotazione dell’orbita sul suo proprio piano).
Ciò significa che l’orbita della Terra non è chiusa, ma l’asse maggiore dell’ellisse
ruota molto lentamente attorno al fuoco dove si trova il Sole: questo effetto è detto
anticipo del perielio (v. fig. 4). Tali variazioni hanno luogo per tutti i pianeti in tempi
molto lunghi; nel caso della Terra, ad esempio, il periodo di tutti e tre i processi è
dell’ordine dei 104 − 105 anni, ma anche così essi hanno prodotto effetti rimarchevoli,
contribuendo a modificare lentamente ma in modo molto evidente le condizioni
climatiche del nostro pianeta.
11
(a)
(b)
(c1)
(c2)
Fig. 4 – Effetti perturbativi sul moto planetario: (a) oscillazioni dell’eccentricità dell’orbita; (b)
precessione del piano dell’orbita rispetto al piano dell’equatore celeste (genera una lenta rotazione della
linea degli equinozi, rispetto ad un asse passante per il Sole e normale al piano orbitale, nel verso
indicato dalle frecce); (c) anticipo del perielio (in questo caso la rotazione dell’asse maggiore dell’ellisse
intorno al suo fuoco F (c1) genera un’orbita aperta detta a rosetta (c2)).
12
4.3 Il sistema Sole, Giove, cometa
Al contrario del caso precedente, le orbite dei corpi minori del Sistema Solare,
ossia corpi dalle dimensioni molto minori di quelle planetarie (come ad esempio gli
asteroidi, le comete ed i meteoroidi), possono subire perturbazioni particolarmente
intense e violente, provocate da un terzo corpo massiccio, in genere un pianeta gigante
come Giove o Saturno. Esse possono causare drastici cambiamenti orbitali su tempiscala dell’ordine dei giorni. Questa marcata differenza rispetto al caso del moto dei
pianeti deriva dal fatto che questi ultimi sono separati da grandi distanze; al contrario i
corpi minori possono trovarsi a passare a distanze dai pianeti molto minori di quelle
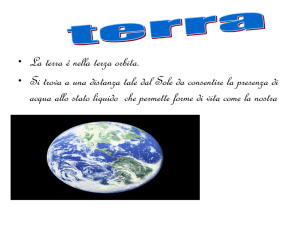
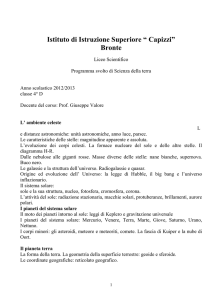
interplanetarie. Ad esempio, se si analizza il grafico in fig. 5, si può dire che quando
una cometa si avvicina per la prima volta al Sole, provenendo dalle regioni più remote
del Sistema Solare, essa si trova su un livello di energia totale prossimo allo zero,
descrivendo un’orbita ellittica fortemente eccentrica con un periodo molto maggiore
di 200 anni. In tal caso, a seguito di uno o più incontri ravvicinati con Giove o
Saturno, l’energia totale della cometa potrebbe ad esempio scendere ad un valore
corrispondente al livello (2); l’orbita si tramuterebbe quindi in una caratterizzata da
più bassi valori del semiasse maggiore e dell’eccentricità ed il corpo si trasformerebbe
in una cometa di corto periodo, diventando un membro permanente del Sistema Solare
interno. Un processo di questo tipo si è verificato ad esempio per la cometa di Halley,
catturata nella parte interna del Sistema Solare circa 230 mila anni fa da un incontro
ravvicinato col pianeta Giove. In seguito a tale perturbazione la cometa ha assunto
una nuova orbita, molto simile a quella attuale che è caratterizzata da un periodo di 76
anni, un afelio a 35 unità astronomiche dal Sole (oltre l’orbita di Nettuno) ed un
perielio a 0.6 unità astronomiche (tra l’orbita di Mercurio e quella di Venere).
Il processo inverso a quello ora descritto si realizza quando un corpo, avente
inizialmente un’energia corrispondente per esempio al livello (2) di fig. 5, assorbe
energia tramite un incontro ravvicinato con un terzo corpo, “saltando” ad un livello
energetico caratterizzato da un’energia positiva (ad esempio quello indicato con (3)
nella fig. 5). In tal caso esso muta la sua orbita in iperbolica ed è pertanto destinato ad
abbandonare il Sistema Solare. L’energia minima necessaria perché un corpo si
svincoli dal livello (2) è stata indicata con Ed in fig 5. E’ molto probabile che questo
tipo di meccanismo di espulsione abbia operato molto spesso in passato nel Sistema
Solare, soprattutto nella fase immediatamente successiva alla sua formazione.
13
Fig. 5 – Andamento radiale del potenziale effettivo Ep,eff , che, insieme con il valore dell’energia totale
E del corpo, determina il tipo di traiettoria seguita da quest’ultimo.
4.4 Orbite delle sonde interplanetarie: effetto fionda
Per lanciare una navicella spaziale dal nostro pianeta verso un altro corpo del
Sistema Solare bisogna fornirle un’energia sufficiente per vincere la forza di gravità
terrestre ed immetterla su un’orbita eliocentrica che interseca quella del corpo
bersaglio. E’ inoltre vantaggioso raggiungere l’oggetto celeste a bassa velocità
relativa, soprattutto se la sonda non deve compiere un semplice incontro ravvicinato
(flyby) con il corpo, ma deve entrare in orbita intorno ad esso o atterrarvi.
Viaggi interplanetari tra corpi posti su orbite pressoché circolari e coplanari
(come accade in genere per i pianeti) possono essere realizzati tramite le cosiddette
orbite di trasferimento di Hohmann. Si tratta di un tipo di orbita ellittica tangente alle
due orbite circolari del corpo di partenza e di arrivo. In particolare la traiettoria risulta
tangente in perielio all’orbita del corpo più interno, mentre in afelio a quella del corpo
più esterno. In genere le orbite di trasferimento di Hohmann richiedono la minima
massa di combustibile necessaria per i viaggi interplanetari.
14
Le traiettorie seguite dalle sonde spaziali lanciate verso Marte o Venere sono
di fatto delle orbite di trasferimento di Hohmann, ma altre destinazioni richiedono
tragitti più complicati che utilizzano un meccanismo molto sfruttato in astronautica, il
cosiddetto effetto fionda (gravity assist) da parte di un pianeta intermedio. Tale
meccanismo di accelerazione o decelerazione della navicella può essere spiegato
qualitativamente come segue (v. fig. 6).
Fig. 6 – Geometria dell’effetto fionda
Nel sistema di riferimento solidale con
il pianeta la sonda, per effetto
dell’interazione gravitazionale con quest’ultimo, cambia solo in direzione la propria
r
r
velocità da V−′ a V+′ .
Nel sistema di riferimento solidale con il Sole, invece, la velocità della sonda
r
r
r
r
r
r
cambia in generale anche in modulo da V− = V−′ + V a V+ = V+′ + V .
Se la sonda passa “a monte” del pianeta, ossia se interseca l’orbita di quest’ultimo in
un punto da cui il pianeta è appena passato, la velocità della sonda aumenta; se la
sonda passa “a valle” del pianeta, ossia se ne interseca l’orbita in un punto da cui il
pianeta deve ancora passare, allora la velocità della sonda diminuisce (v. fig. 6). In
15
questo modo è possibile far variare (in genere aumentare) la velocità della sonda
rispetto al Sole.
Siccome la velocità richiesta per mandare una sonda direttamente dalla Terra a
Mercurio è piuttosto alta, per risparmiare combustibile le navicelle spaziali che finora
hanno raggiunto tale pianeta hanno sfruttato l’effetto fionda ad opera di Venere.
Inoltre l’effetto fionda da parte di Giove viene usualmente utilizzato per inviare sonde
verso Saturno ed oltre (v. fig. 7).
Fig. 7 – Schema della traiettoria seguita dalla sonda Cassini verso il sistema di Saturno. La prima parte
della traiettoria (in verde), dal lancio fino al primo fly-by di Venere, è molto simile ad un’orbita di
trasferimento di Hohmann. Si notino i fly-by di Venere, Terra e Giove, con i relativi effetti fionda,
necessari per inviare la sonda verso il suo obiettivo.
Tutto ciò riguarda le sonde con motori a combustibile chimico che bruciano
velocemente il loro combustibile ricevendo una spinta intensa e di breve durata.
I motori a propulsione elettrica, invece, sono molto più efficienti, esercitando una
spinta piccola ma costante che altera lentamente l’orbita della sonda; tale traiettoria
assume pertanto una tipica forma a spirale.
5. Forze dissipative ed orbite dei corpi minori
Oltre alla forza di gravità, altre forze agiscono sui corpi del Sistema Solare a
causa dell’assorbimento o dell’emissione di radiazione elettromagnetica da parte dei
corpi stessi. Mentre la gravità agisce sull’intero volume di un corpo, tali forze
16
riguardano soltanto la superficie. Pertanto queste forze non gravitazionali sono più
efficaci sui piccoli corpi che hanno un elevato rapporto superficie/volume.
Tre principali meccanismi di tipo radiativo influenzano le orbite dei corpi
minori:
a) pressione di radiazione, che spinge le particelle (principalmente quelle
micrometriche) lontano dal Sole;
b) effetto Poynting-Robertson, che provoca una spiralizzazione verso il Sole delle
particelle (soprattutto di quelle di dimensioni di qualche decina di micrometri);
c) effetto Yarkovsky, che è in grado di modificare le orbite di corpi di dimensioni che
vanno dal metro alle decine di chilometri.
Un quarto meccanismo, il cosiddetto effetto YORP, pur non essendo in grado di
alterare le orbite dei corpi, produce variazioni significative dei periodi di rotazione
assiale di asteroidi fino a 20 km di diametro.
Infine un quinto meccanismo, non di tipo radiativo ma corpuscolare, è dovuto
all’interazione dei grani interplanetari con il vento solare; esso è in grado di dar luogo
a modifiche orbitali simili a quelle prodotte dall’effetto Poynting-Robertson,
importanti soprattutto per particelle submicrometriche.
5.1 Pressione di radiazione
La forza repulsiva associata alla pressione di radiazione del Sole si esercita su
tutti i corpi del Sistema Solare; essa è esprimibile come:
r
LS A Q pr
FR ≈ G
rˆ ,
4π c r 2
dove A è la sezione geometrica del corpo, LS la luminosità solare, r la distanza dal
Sole, c la velocità della luce nel vuoto e Qpr un parametro adimensionale detto
coefficiente di pressione di radiazione che tiene conto dell’efficienza di assorbimento
e di diffusione della radiazione da parte del corpo (Qpr = 1 per corpi perfettamente
assorbenti). Per particelle piccole rispetto alla lunghezza d’onda della radiazione
incidente si ha che Qpr « 1, mentre per particelle grandi tale coefficiente assume valori
tipicamente dell’ordine dell’unità.
La forza associata alla pressione di radiazione che si esercita su un corpo
sferico grande rispetto alla lunghezza d’onda della radiazione incidente è
17
proporzionale alla sezione geometrica del corpo πR2, mentre la forza gravitazionale è
proporzionale alla sua massa (4/3)πR3ρ, sicché il rapporto tra le due forze scala come
1/(ρR). Per grani in orbita eliocentrica, tale rapporto è espresso numericamente tramite
il parametro adimensionale β, definito come:
β =
Q pr
FR
= 5.7 × 10 −5
FG
ρR
con raggio e densità in unità c.g.s.. Siccome entrambe le forze che compaiono nella
precedente scalano come r−2, tale rapporto è indipendente dalla distanza eliocentrica.
La pressione di radiazione solare è importante solo per particelle
micrometriche: grani più piccoli non risentono molto di tale pressione in quanto Qpr
decresce rapidamente al decrescere del raggio sotto la lunghezza d’onda di picco dello
spettro solare, mentre particelle più grandi hanno un piccolo valore del parametro β a
causa dei grandi valori di R.
L’effettiva attrazione gravitazione del Sole è data da:
r ′
(1 − β ) G m M S
FG = −
rˆ
r2
ossia la particella “sente” una massa del Sole pari a (1 − β) MS invece di MS.
Ovviamente per piccole particelle con β > 1 la forza d’attrazione del Sole è
meno intensa di quella associata alla pressione di radiazione solare e pertanto tali
particelle vengono rapidamente espulse dal Sistema Solare. In realtà, le tipiche
velocità con cui piccoli grani di polvere sono espulsi da alcuni corpi, quali le comete,
sono tali da far si che queste particelle vengano allontanate dal Sistema Solare se
β > 0.5.
5.2 Effetto Poynting-Robertson
L’effetto Poynting–Robertson è un complesso fenomeno relativistico sul quale
a tutt’oggi non esiste una teoria quantitativa universalmente accettata (Burns et al.,
1979; Srikanth, 1999). Consideriamo una stella, quale può essere ad esempio il nostro
Sole, ed un grano che le orbita attorno con velocità v (v. fig. 8a). Il diagramma polare
dell’intensità della radiazione emessa dal grano nel riferimento della particella è
18
rappresentato evidentemente da una circonferenza (v. fig. 8b): l’intensità è isotropa
come pure la quantità di moto ad essa associata. Tuttavia tale descrizione vale solo nel
sistema di riferimento della particella, mentre nel sistema di riferimento della stella si
può provare (Burns et al., 1979) che il diagramma polare della radiazione emessa è
piccato in avanti, cioè nella direzione della velocità v della particella (v. fig. 8c). In
altre parole nel sistema di riferimento della stella la quantità di moto associata alla
radiazione emessa non è più isotropa ma anch’essa piccata in avanti. La maggiore
quantità di moto emessa in avanti dalla particella dà quindi luogo ad una sorta di
“effetto razzo”, per cui il grano riceve una spinta opposta a v e tende a rallentare.
a
b
c
Fig. 8 – a) Rappresentazione schematica di un grano in orbita attorno ad una stella. b) Diagramma
polare dell’intensità della radiazione emessa dal grano nel sistema di riferimento ad esso solidale. c)
Idem come in (b) ma nel sistema di riferimento della stella centrale.
In particolare nel caso del Sole, l’assorbimento della radiazione solare produce
sulla particella una forza ritardante pari a:
r
LS A Q pr
v r
(1 − R ) v
FPR = −
2 2
c
4π c r
dove vR è la componente radiale della velocità della particella. Per un grano sferico,
posto su un’orbita circolare, la precedente può essere più convenientemente scritta
come:
r
LS R 2 Q pr
FPR = −
4 c2
GMS
vˆ
r5
19
in cui è evidenziata la dipendenza di tale forza dalle caratteristiche della particella e
del Sole.
In assenza della forza di Poynting–Robertson, ad una distanza fissata r0 dal
Sole, in condizioni di equilibrio, la forza centrifuga, FC, rilevata da un osservatore non
inerziale solidale con il grano, è bilanciata dalla forza gravitazionale dovuta al Sole,
FG , ossia risulta FC = FG. Si ha, pertanto:
m v2 / r0 = G MS m / r02
(8)
con MS massa del Sole ed m massa del grano.
L’effetto Poynting–Robertson, come già visto, rallenta la velocità del grano e
quindi diminuisce l’intensità della forza centrifuga nella (8); poiché la FG rimane
costante, ci si ritrova in una situazione in cui FC < FG; pertanto la particella si avvicina
al Sole spiralizzando verso di esso fino a sublimare in prossimità della stella.
Ciò può essere visto anche da un punto di vista energetico. Infatti, partendo
dall’espressione dell’energia totale del grano E = − G MS m / r , si ricava la relazione:
ΔE = (G MS m / r2) Δr .
(9)
Siccome la forza di Poynting–Robertson agente sul grano nel sistema di
riferimento del Sole è di fatto paragonabile ad una forza d’attrito, tale forza tende a
dissipare l’energia della particella che così diminuisce; ma per la (9) una diminuzione
dell’energia meccanica equivale ad un riduzione di r, e quindi la particella spiralizza
verso il Sole.
Tipicamente l’effetto Poynting–Robertson è efficace per particelle di
dimensioni comprese tra 1 e 100 μm (Mukai, 1989).
5.3 Effetto Yarkovsky
Consideriamo un corpo in rotazione lenta attorno al proprio asse ed in orbita
intorno al Sole che lo riscalda. L’emisfero pomeriggio/sera è tipicamente più caldo
dell’emisfero opposto (notte/mattino) di una quantità ΔT « T (con T temperatura media
giornaliera). Evidentemente la radiazione emessa dal corpo non è isotropa come quella
emessa da un corpo isotermo, ma anche nel sistema di riferimento solidale con il corpo
(e non solo in quello solidale col il Sole − v. par. 5.2) il diagramma polare della
20
radiazione emessa è piccato dalla parte dell’emisfero più caldo. Siccome anche la
quantità di moto associata alla radiazione emessa non è isotropa ma anch’essa piccata
dalla parte dell’emisfero pomeriggio/sera, ne consegue, come nel caso dell’effetto
Poynting-Robertson, un “effetto razzo”, per cui il grano riceve una spinta dalla parte
dell’emisfero più caldo. A questo punto è facile vedere che, se la rotazione assiale è
prograda (ossia nello stesso verso di quella orbitale), allora l’emisfero più caldo è
quello posteriore (nel senso del moto orbitale) e pertanto il corpo viene accelerato con
conseguente allargamento dell’orbita; altrimenti, se la rotazione assiale è retrograda,
allora l’emisfero più caldo è quello anteriore, cosicché il corpo viene decelerato con
conseguenze identiche a quelle prodotte dall’effetto Poynting-Robertson, ossia una
progressiva riduzione del semiasse orbitale. Tale effetto è noto con il nome di effetto
Yarkovsky diurno.
Da un punto di vista più quantitativo si può dire che, per un corpo sferico di
raggio R, assumendo che la temperatura dell’emisfero notte/mattino sia T − ΔT/2,
mentre quella dell’emisfero pomeriggio/sera T +ΔT/2, la forza dovuta all’eccesso di
emissione da parte dell’emisfero più caldo vale:
4
r
ΔT
8
2 σT
cos φ vˆ
FY = π R
c
T
3
(10)
dove φ è l’obliquità del corpo, ossia l’angolo tra l’asse di rotazione e la normale al
piano orbitale, mentre gli altri simboli hanno l’usuale significato.
Le considerazioni qualitative sopra riportate discendono direttamente dalla
(10), ricordando che, per un oggetto che ruota in verso progrado, per definizione di
obliquità si ha 0° ≤ φ < 90°, mentre per una rotazione retrograda risulta 90° ≤ φ ≤ 180°.
L’effetto Yarkovsky altera in modo significativo le orbite di corpi con
dimensioni comprese tra qualche metro ed una decina di chilometri. La prima evidenza
osservativa di tale effetto è stata ottenuta usando misure delle deviazioni orbitali
mostrate dall’asteroide 6489 Golevka rispetto a quanto previsto sulla base di modelli
puramente gravitazionali.
21
APPENDICE
Il moto della Luna
Il moto apparente della Luna sulla sfera celeste
Il comportamento della Luna in cielo è molto più complicato di quello del Sole
e pertanto la descrizione del moto lunare merita di essere trattata più in dettaglio
rispetto a quanto fatto nel corso di astronomia generale. La Luna compie una
rivoluzione intorno alla Terra muovendosi su una traiettoria ellittica, inclinata di circa
5.15° rispetto all’eclittica, ad una distanza media di circa 60 volte il raggio del nostro
pianeta (v. fig. A1). Siccome la Terra a sua volta orbita intorno al Sole, la traiettoria
risultante della Luna rispetto alla nostra stella è quella mostrata in fig. A2.
Le distanze estreme raggiunte dalla Luna durante la sua rivoluzione sono
rispettivamente 55.4 volte il raggio medio terrestre, la minima (al perigeo), e 66.1
volte, la massima (all'apogeo). La linea ideale congiungente l'apogeo ed il perigeo è
detta linea degli apsidi; a causa delle azioni gravitazionali combinate dovute alla
Terra e al Sole, essa ruota nel piano dell’orbita in senso diretto (cioè in direzione del
moto orbitale della Luna) in modo tale che in 3232.59 giorni solari medi viene
compiuto un giro completo rispetto alla posizione delle stelle sulla sfera celeste.
Fig. A1 – Orbita della Luna intorno alla Terra e linea dei nodi
22
23
I punti di intersezione tra l'orbita lunare e il piano dell'orbita terrestre sono detti
nodi (v. fig. A1). Il nodo ascendente corrisponde al punto in cui la Luna attraversa il
piano orbitale della Terra salendo da latitudini eclittiche negative (australi) a latitudini
positive (boreali). Il nodo discendente, invece corrisponde al punto di intersezione in
cui la Luna scende dalle latitudini eclittiche boreali a quelle australi. Questi due
particolari punti si muovono sotto l'effetto combinato dell'attrazione gravitazionale del
Sole e della Terra sulla Luna. Tale moto di precessione dei nodi dell'orbita lunare è
retrogrado, cioè diretto in senso opposto rispetto alla direzione del moto della Luna
nella sua orbita. Una rotazione completa dei nodi richiede 6793.39 giorni solari che
corrispondono a 18.61 anni solari. Il fenomeno della precessione dei nodi lunari venne
probabilmente scoperto solamente in maniera indiretta sulla base dell'osservazione
della cadenza delle eclissi, oppure in seguito ad un lungo e continuo lavoro di
osservazione dello spostamento dei punti di sorgere e di tramontare dell'astro
all'orizzonte naturale locale.
Le periodicità della Luna
Il moto della Luna presenta molte periodicità, tra le quali le principali sono il
mese sinodico ed il mese siderale. Il mese sinodico è definito come l'intervallo
richiesto alla Luna per passare da una determinata fase alla successiva dello stesso
tipo, per esempio da un plenilunio al successivo. La lunghezza del mese sinodico
lunare vale 29.5306 giorni solari medi (pari a 29 giorni, 12 ore, 44 minuti e 2.9
secondi). Il mese siderale lunare invece è l'intervallo che intercorre in media tra due
passaggi consecutivi della Luna nella medesima posizione tra le stelle. La lunghezza
del mese siderale vale 27.3217 giorni solari medi (ossia 27 giorni, 7 ore, 43 minuti e
11.5 secondi), quindi risulta essere più corto di circa 2 giorni rispetto a quello
sinodico. Il motivo di questa differente lunghezza dei due tipi di mese viene discusso
nel corso di astronomia generale ed è comunque evidente dall’esame della fig. A2.
Ragionando dal punto di vista dello sviluppo dei calendari lunisolari è
necessario prendere in esame anche altre due periodicità: il mese draconitico e quello
anomalistico. Il nodo ascendente dell'orbita lunare, per effetto del suo moto retrogrado
di precessione, si muove in modo da andare incontro alla Luna e quindi l'intervallo tra
due passaggi consecutivi allo stesso nodo è più corto se paragonato al periodo di
rivoluzione siderale. Questo periodo è detto mese draconitico e vale attualmente 27
giorni, 5 ore, 5 minuti e 35.8 secondi di tempo medio. Il mese anomalistico è invece
24
l'intervallo tra due passaggi della Luna al perigeo, cioè l'intervallo di tempo richiesto
in media per tornare due volte consecutive nello stesso punto della sua orbita. La
durata del mese anomalistico è 27 giorni, 13 ore, 18 minuti e 33.2 secondi di tempo
medio. Tale periodo è più lungo del precedente a causa del fatto che il moto di
rotazione della linea degli apsidi avviene nella stessa direzione del moto orbitale (v.
paragrafo precedente).
Infine abbiamo il mese tropico che rappresenta l'intervallo di tempo tra due
congiunzioni eclittiche successive tra la Luna e il punto Gamma o punto equinoziale
primaverile, cioè il punto occupato dal Sole all'equinozio di primavera. Il mese tropico
è più corto del mese siderale di circa 7 secondi perché la direzione del punto
equinoziale primaverile non è fissa nello spazio, ma per effetto del fenomeno della
precessione degli equinozi si sposta in senso retrogrado lungo l'eclittica andando
incontro alla Luna.
Riassumendo, esistono quindi cinque tipi di rivoluzioni lunari: 1) la
rivoluzione sinodica (detta anche lunazione), 2) la rivoluzione tropica, 3) la
rivoluzione siderale, 4) la rivoluzione draconitica, 5) la rivoluzione anomalistica.
Proprio a causa di questa complessità del moto apparente del nostro satellite naturale,
un gran numero di famosi matematici tra i quali Newton, Gauss, Eulero, Laplace,
Delaunay e molti altri dedicarono gran parte della loro vita a sviluppare metodi di
calcolo che fossero in grado di prevedere con la massima accuratezza possibile la
posizione della Luna nel cielo. Tutti questi sforzi vennero compiuti dal XVII secolo in
poi sotto la spinta della necessità di determinare quanto più accuratamente possibile la
posizione delle navi in mare durante la navigazione oceanica.
Il movimento dei punti di levata e di tramonto della Luna
Come abbiamo visto l'orbita della Luna interseca quella della Terra in due
punti, i nodi, che sono soggetti al fenomeno periodico della precessione retrograda;
inoltre l'orbita del nostro satellite naturale è inclinata rispetto a quella della Terra di
un angolo, denominato i pari, in media, a 5.15°. Tale valore è soggetto ad una
variazione periodica di ampiezza pari a 0,15° e periodo di 173.3 giorni. A sua volta
l'eclittica è inclinata rispetto all'equatore celeste di un angolo, indicato con e, pari
attualmente a 23.45° e lentamente variabile nel tempo oscillando grosso modo da 22° a
24° in un periodo di 41013 anni.
25
Il particolare valore dell'inclinazione dell'orbita della Luna implica che, nelle
regioni geografiche corrispondenti all'Europa, durante l'inverno, nelle notti di
plenilunio, la Luna sia visibile molto in alto nel cielo. Durante l'estate invece si
verifica la situazione opposta, cioè nelle notti di plenilunio la Luna è abbastanza bassa
sull'orizzonte.
Per effetto del moto di precessione dei nodi può accadere che, ad una certa
epoca, il nodo ascendente vada a coincidere con la posizione del punto Gamma, cioè il
punto di intersezione tra l'equatore celeste e l'eclittica. Come mostrato in fig. A3, in
questo caso la Luna, muovendosi lungo la sua orbita, raggiunge il punto di massima
distanza angolare al di sopra dell'equatore celeste, cioè la sua massima declinazione
boreale geocentrica, la quale risulta pari a δ =(+ e + i), vale a dire 28.6°. In quel
giorno (l’ultimo fenomeno di questo tipo è avvenuto il 15 settembre 2006) la Luna, in
un dato luogo, sorge molto a nord, più a settentrione rispetto al punto di levata del Sole
al solstizio d'estate, durante il quale l'astro diurno arriva ad avere una declinazione pari
solamente a δ =+e. La Luna allora si dice essere al lunistizio estremo superiore e il
suo punto di levata all'orizzonte astronomico locale è detto punto d'arresto superiore.
L'azimut di levata della Luna (contato dalla direzione nord del meridiano astronomico
locale muovendosi positivamente ad est), dato dall’equazione:
⎛ sin δ ⎞
⎟⎟ ,
a L ≈ arccos ⎜⎜
⎝ cos ϕ ⎠
assume allora il minimo valore consentito durante il ciclo di 18.6 anni. Questo valore
dipende anche dalla latitudine ϕ del luogo di osservazione ed è numericamente tanto
minore quanto più il luogo di osservazione si avvicina al polo nord della Terra.
Una situazione interessante si verifica qualora il luogo di osservazione sia
posto ad una latitudine maggiore o uguale a ϕ = (90°− e − i): in questo caso l'astro
notturno diventa temporaneamente circumpolare e anche questo fenomeno si ripete
ogni 18.61 anni. Attualmente la latitudine critica perchè il fenomeno possa essere
visibile vale 61.4° (v. fig. A4). A tali latitudini, mezzo mese draconitico dopo il
lunistizio superiore, cioè dopo 13.6 giorni, l'astro percorrerà la sua traiettoria nel cielo
rimanendo sempre sotto l'orizzonte astronomico locale. In prossimità di quei giorni la
traiettoria lunare andrà gradualmente abbassandosi fino ad essere percorsa interamente
sotto l'orizzonte.
26
Fig. A3 – Giacitura del piano dell’orbita lunare rispetto a quello dell’eclittica nell’istante in cui il nodo
ascendente della Luna coincide con il punto Gamma. In tale configurazione, che si ripete ogni 18.61
anni, la Luna raggiunge la sua massima inclinazione orbitale sul piano equatoriale, ossia la massima
declinazione, pari a e + i, ed è al lunistizio estremo superiore.
Fig. A4 – Traiettoria della Luna al lunistizio estremo superiore, per un osservatore ad una latitudine
geografica di 61.4°. L’astro diventa circumpolare e può essere visto tutto il giorno.
Quando la Luna si trova al lunistizio estremo superiore e quindi il suo punto di
levata all'orizzonte astronomico locale è posizionato al punto d'arresto superiore, allora
quella notte l'astro culmina molto alto e passa al meridiano locale alla sua massima
altezza, in accordo con l’equazione che fornisce l’altezza alla culminazione, ossia:
27
h = δ − ϕ + 90°.
Mezzo mese draconitico dopo, avendo la Luna percorso metà della sua orbita,
essa si trova nella posizione opposta, motivo per cui la sua declinazione raggiunge il
minimo valore possibile pari a δ =(− e − i), raggiungendo il lunistizio estremo
inferiore, quindi −28.6°, utilizzando i valori attuali (anno 2007) di e ed i (v. fig. A5).
In tal caso il punto di levata della Luna risulta spostato più a sud del punto di levata
del Sole al solstizio d'inverno. Tale punto è indicato con il nome di punto d'arresto
inferiore in quanto la declinazione della Luna è minima ed il punto di levata è quello
di massimo azimut consentito per una determinata latitudine geografica. In quella
notte particolare la Luna sorge nella direzione sud-est, rimanendo però molto bassa
sull'orizzonte durante il suo movimento nel cielo e tramonta in direzione sud-ovest.
Fig. A5 – Andamento della declinazione lunare. La variazione a breve periodo (mensile) viene
modulata da quella a lungo periodo (18.6 anni) dovuta alla precessione dei nodi.
A questo punto appare interessante prendere in esame contemporaneamente sia
la posizione del Sole che quella della Luna e fare alcune considerazioni. In questo caso
si rileva che se l'epoca in cui la Luna è al lunistizio superiore (massima declinazione)
28
in coincidenza con il solstizio estivo, allora l'astro deve giungere in questo particolare
punto della sua orbita alla fase di Luna nuova e quindi, mezzo mese dopo, essa giunge
invece alla sua minima declinazione poco prima del plenilunio. Nel caso il lunistizio
superiore coincida con il solstizio invernale, allora la Luna raggiunge la sua massima
declinazione quando è piena e mezzo mese draconitico dopo, al lunistizio estremo
inferiore (minima declinazione) poco prima del novilunio.
Dopo 9.3 anni dal lunistizio superiore, poiché la linea dei nodi ha compiuto una
rotazione di 180°, è il nodo discendente che risulta allineato con il punto Gamma. In
questo caso la Luna si troverà ai lunistizi intermedi, cioè la massima e la minima
declinazione raggiungibili saranno rispettivamente δ = (e − i) e, mezzo mese
draconitico dopo, δ = (− e + i), cioè rispettivamente 18.3° sopra e 18.3° sotto
l'equatore celeste (v. fig. A7).
Fig. A6 – Giacitura del piano dell’orbita lunare rispetto a quello dell’eclittica all’epoca in cui, dopo
9.3 anni dal lunistizio estremo superiore, è il nodo discendente dell’orbita lunare che coincide con il
punto Gamma. In tale configurazione, che si ripete ogni 18.61 anni, la Luna assume la minima
inclinazione orbitale sul piano equatoriale, con una declinazione pari a e − i, ed è al lunistizio
intermedio superiore. Dopo mezzo mese lunare l’astro si troverà sulla sinistra della figura, con una
declinazione pari a − e + i, e sarà al lunistizio intermedio inferiore.
Quando la declinazione della Luna vale δ = (e − i) (lunistizio intermedio
superiore), l'astro sorge in corrispondenza di un punto dell'orizzonte astronomico
locale posto più a sud rispetto al punto di levata del Sole al solstizio d'estate, ma più a
29
nordd rispetto all punto di leevata dell'asstro diurno agli
a equinozzi. Mezzo m
mese dracon
nitico
doppo, la declinnazione ragggiunta dallla Luna saarà pari a δ = (− e + i) (lunisstizio
inteermedio infeeriore) e quuindi il suo punto
p
di lev
vata, all'orizzzonte astroonomico lo
ocale,
saràà intermedio tra le poosizioni dellla levata solare
s
equinnoziale e qquella solstiiziale
inveernale. Queeste due paarticolari poosizioni van
nno sotto il
i nome di punti d'arrresto
inteermedi.
Appare allora eviddente che, nel
n passaggiio tra le decclinazioni δ = (e − i) e δ =
(− e + i), l'escuursione dell'altezza dellla Luna nel cielo durannte mezzo m
mese dracon
nitico
è consistentem
c
mente minoore di queella che si rileva quuando l'astrro è posto alle
decllinazioni massime.
Riassum
mendo quannto detto possiamo allo
ora affermarre che nel caaso della Lu
una è
neceessario connsiderare i quattro puunti fondam
mentali di levata nelll'arco orieentale
delll'orizzonte astronomico
a
o locale e i corrispondeenti quattro punti di traamonto nelll'arco
occiidentale (v. fig. A7).
Fig. A7 – Punti di levatta e di tramonto della Luna ai lunistizi
Tenenddo conto ancche dei punnti di levataa e tramontoo del Sole aai solstizi e agli
equinozi, rilevviamo che dal
d punto di
d vista arch
heoastronom
mico, escluudendo le stelle,
s
dobbbiamo conssiderare benn 14 posiziooni (8 lunari e 6 solari)) di cui la m
metà al sorg
gere e
l'altra metà al trramonto.
30
L'esistenza dei numerosi allineamenti su questi particolari punti d'arresto
sperimentalmente rilevati in una grande quantità di siti europei che si collocano
cronologicamente dalla preistoria alla proto-storia è un dato di fatto che non può essere
trascurato; ecco che la valenza rituale della Luna potrebbe essere una giustificazione
più appropriata per spiegare l'esistenza degli allineamenti rilevati.
31