Capitolo VI
I SEGNALI GAUSSIANI
VI.1 – Variabili aleatorie normali o gaussiane.
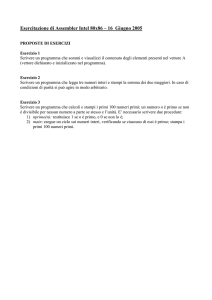
Sia W una variabile aleatoria caratterizzata dalla seguente densità di probabilità:
1
pW ( w) =
(VI.1.1)
e
2π
−
w2
2
rappresentata in Fig. VI.1.
Una tale variabile aleatoria presenta:
a) valor medio nullo.
pW (w)
Infatti è:
mW ≡ E {W } =
(VI.1.2)
∞
1
2π
∫−∞ we
−
w2
2
dw = 0
essendo l’integrando una funzione dispari di w .
b) varianza unitaria.
w
Infatti, essendo il valor medio nullo, è:
Fig.VI.1 Densità di probabilità di una
variable aleatoria normale o gaussiana.
2
σW
(VI.1.3)
{ }=
=E W
2
∞
1
2π
∫−∞ w e
2
−
w2
2
dw
{ ( )} = −w exp ( ) dw , diviene, sviluppando l’integrale per parti:
che, notando che è d exp
(VI.1.4)
σW2 =
1
−
w2
2
−
∞
∫ wd ⎡⎣ − exp
2π −∞
( )
−
w2
2
w2
2
1 ⎡
− w exp
2π ⎣
⎤=
⎦
( )
−
w2
2
∞
⎤ +
⎦ −∞
1
2π
∫
∞
−∞
e
−
w2
2
dw = 1
dove si è tenuto conto che è, per la condizione di normalizzazione:
w2
∞ −
1
(VI.1.5)
∫ e 2 dw = 1
2π −∞
Una variabile aleatoria siffatta si definisce normale (o gaussiana) a valor medio nullo e
varianza unitaria e si scrive:
W ≈ N (0,1)
(VI.1.6)
Di particolare interesse è la funzione Q , definita dalla
Q( x) =
(VI.1.7)
1
2π
∫
∞
x
e
−
w2
2
dw
Essa non può essere espressa in forma chiusa; tuttavia se ne possono dare efficaci approssimazioni per valori elevati del suo argomento. A tale scopo si ha:
∞
∞ 1
∞ 1
− w2 / 2
− w2 / 2
− w2 / 2
∫x e dw = ∫x w we dw = ∫x w d −e dw =
(VI.1.8)
2
∞
∞ 1
∞ 1
2
1
2
2
e− x / 2
=
−e− w / 2 − ∫ 2 e − w / 2 dw =
− ∫ 2 e − w / 2 dw
x
x
w
x
w
w
x
(
(
)
(
)
)
D’altra parte poiché, per x > 0 , è:
∞ 1
∞ w
1
2
2
0 < ∫ 2 e − w / 2 dw = ∫ 3 e− w / 2 dw < 3
(VI.1.9)
x w
x w
x
∫
∞
x
2
we − w / 2 dw =
2
e− x / 2
x3
-48-
G. Mamola: Fondamenti di Comunicazioni Elettriche
si ottiene:
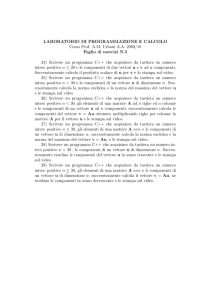
1
1 ⎞
e− x / 2
⎛
⎜1 − 2 ⎟ < Q( x) <
2π x ⎝ x ⎠
πx
e− x
(VI.1.10)
Q( x)
2
1
10−1
e
2π
−x / 2
2 /2
2
( x > 0)
Nella Fig.VI.2 sono riportati i limiti dati dalla
x
(VI.1.10) unitamente all’andamento della funzione
Q( x) .
−2
10
Sia X una variabile aleatoria definita dalla
X = aW + b
(VI.1.11)
2
1
10−3
e
2π
−x / 2
x
con a
⎛1 − 1 ⎞
⎝ x2 ⎠
e b costanti reali. Per determinare la
(a ≠ 0)
densità di probabilità di X , basta osservare che la
probabilità
0,5
1
1,5
2
x
che
Fig. VI.2 – Funzione Q e suoi limiti.
I x ≡ ⎡⎣ x −
che
I w ≡ ⎡⎣ w −
Δx
2
,x +
W
Δw
2
Δx
2
X
appartenga
all’intervallo
3
X
⎤⎦ è eguale alla probabilità
appartenga
all’intervallo
, w + ⎤⎦ (v. Fig. VI.3). In altre
Δw
2
parole, supponendo Δw
e Δx
x
Δx
X = aW + b
abbastanza
Δw
piccoli, si deve avere:
p X ( x) Δx = pW ( w) Δw
(VI.1.12)
w
W
Fig.VI.3– Determinazione della d.d.p. della v.a. X .
dove si è tenuto conto del fatto che le
probabilità interessate sono quantità positive. La (VI.1.12), essendo w =
riscritta come segue:
(VI.1.13)
pX ( x) =
pW
( )=
x −b
a
Δx
Δw
1
pW
a
x −b
a
, può essere
( )
x −b
a
e cioè:
pX ( x) =
(VI.1.14)
−
1
2πa
2
e
( x − b )2
2 a2
Dalla (VI.1.11) si ricava il valore medio:
mX = E { X } = aE {W } + b = b
(VI.1.15)
e la varianza;
(VI.1.16)
σ X2 = E {( X − mX ) 2 } = E {( X − b)2 } = E {(aW )2 } = a 2
per cui la (VI.1.14) assume la forma:
(VI.1.17)
pX ( x) =
−
1
2πσ
2
X
e
( x − m X )2
2 σ 2X
che costituisce la più generale espressione delle densità di probabilità di una variabile aleatoria gaussiana caratterizzata da un valor medio μ x e da una varianza σ 2x . Si scrive:
(VI.1.18)
48
X ≈ N (m X , σ 2X )
I segnali gaussiani
-49-
VI.2 – Vettori aleatori a valori reali, normali o gaussiani.
Sia W un vettore aleatorio a valori reali ad n dimensioni:
⎡W1 ⎤
⎢W ⎥
(VI.2.1)
W = ⎢ 2⎥
⎢ ⎥
⎢ ⎥
⎣Wn ⎦
caratterizzato dalla densità di probabilità congiunta delle sue componenti:
n
⎛
⎞
1
1
(VI.2.2)
pW (w ) =
exp ⎜ − 12 ∑ wi2 ⎟ =
exp − 12 wT w
⎜
⎟
n
n
(2 π )
(2 π )
i =1
⎝
⎠
(
)
È facile verificare che le componenti Wi (i = 1, 2 … n) sono variabili aleatorie gaussiane, statisticamente indipendenti, con valor medio nullo e varianza unitaria. Infatti dalla (VI.2.2) si
ha:
pW (w ) =
(VI.2.3)
n
∏
1
− wi2
e 2
1
2π
i =1
La pW (w ) è ottenuta dal prodotto delle n densità di probabilità marginali:
1
pWi (wi ) =
(VI.2.4)
Risulta:
(VI.2.5)
2π
e
1
− wi2
2
{ }
2
mWi = E {Wi } = 0 ; σW
= E Wi 2 = 1
i
(i = 1, 2, … , n )
Inoltre le componenti di W sono, come è facile verificare, statisticamente indipendenti;
cioè:
⎧1
E {WrWs } = ⎨
⎩0
(VI.2.6)
r = s
r ≠ s
Le (VI.2.5) e (VI.2.6) sono riassunte nelle:
(VI.2.7)
mW = E {W } = 0
{
; ΣW = E WW T
}
⎡1
⎢0
=⎢
⎢
⎢
⎣0
0
1
0
0⎤
0 ⎥⎥
=I
⎥
⎥
1⎦
Un vettore aleatorio di questo tipo è pertanto caratterizzato da un vettore dei valori medi
nullo e da una matrice di correlazione ΣW unitaria. Un vettore siffatto si dice normale (o
gaussiano) e si denota come segue:
W ≈ N (0, I )
(VI.2.8)
Sia ora
X = AW + a
(VI.2.9)
un vettore aleatorio a valori reali ottenuto da W per trasformazione affine la cui matrice A ,
di dimensioni n × n , si suppone non singolare. Per dedurre la densità di probabilità congiunta p X ( x ) delle componenti del vettore X in funzione dell’analoga densità pW ( w ) delle
componenti del vettore W , basta osservare che, detto Δx un elemento infinitesimo dello
spazio n , si deve avere:
(VI.2.10)
p X ( x ) Δx = pW (w ) Δw
dove Δw denota l’elemento dello spazio
n
che, per effetto della trasformazione (VI.2.9),
porta a Δ x . È noto dalla Geometria che è
49
-50-
G. Mamola: Fondamenti di Comunicazioni Elettriche
Δx = det( J ) Δw
(VI.2.11)
essendo J la matrice jacobiana della trasformazione, il cui generico elemento è definito
dalla J ij =
∂xi
. Si ha J = A . Pertanto, ricordando la (VI.2.9) è:
∂w j
pW ⎡ A−1( x − b )⎤
⎣
⎦ =
pX ( x ) =
det( A)
(VI.2.12)
=
1
(2π) det( A)
n
1
(2π) det( A)
n
exp ⎡ − 12 ( x − b )T ( AT )−1 A−1( x − b)⎤ =
⎣
⎦
exp ⎡ − 12 ( x − b )T ( AAT )−1( x − b )⎤
⎣
⎦
Dalla (VI.2.9), tenendo conto delle (VI.2.7), si deducono le espressioni del vettore dei valori medi e della matrice di covarianza del vettore aleatorio X .
m X = E { X } = AE {W } + a = a
(VI.2.13)
Σ X = E ( X − m X )( X − m X )T = E AwwT AT = AAT
{
} {
}
e di conseguenza la (VI.2.12) può essere riscritta nella forma:
1
exp ⎡⎣ − 12 ( x − m X )T (Σ X ) −1 ( x − m X ) ⎤⎦
pX ( x) =
(VI.2.14)
n
(2π) det(Σ X )
essendo det(Σ X ) = det( AAT ) = det( A) det( AT ) = [ det( A) ] .
2
Viceversa è facile mostrare che è sempre possibile definire almeno una trasformazione
affine, del tipo della (VI.2.9), che conduca ad un vettore X ≈ N ( m X , Σ X ) , a partire dal vettore W ≈ N (0, I ) . In altre parole ciò equivale a dire che, dati i parametri m X e Σ X che caratterizzano un vettore aleatorio X , è sempre possibile determinare un vettore a e una
matrice A che soddisfino le (VI.2.13). Per quanto riguarda il vettore a è:
a = mX
(VI.2.15)
mentre una possibile soluzione per la matrice A è (v. Appendice):
(VI.2.16)
A = U diag( λ1 , λ 2 , , λ n )U T
dove U denota la matrice composta dagli autovettori ui e diag( λ1 , λ 2 ,
, λ n ) una matri-
ce diagonale composta dagli autovalori della matrice Σ X :
U = [ u1
(VI.2.17)
u2
un ] ; diag( λ1 , λ 2 ,
⎡ λ1
⎢
⎢ 0
, λn ) = ⎢
⎢
⎢ 0
⎣
0
λ2
0
0 ⎤
⎥
0 ⎥
⎥
⎥
λ n ⎥⎦
Un vettore aleatorio è definito normale (o gaussiano) quando la sua densità di probabilità congiunta è della forma espressa dalla (VI.2.14). La statistica di un vettore gaussiano è
pertanto completamente determinata se si conosce il vettore dei valori medi m X e la matrice di covarianza Σ X . Poiché è:
{
} {
} {
}
(VI.2.18) Σ X = E ( X − m X )( X − m X )T = E XX T − Xm TX − m X X T + m X m TX = E XX T − m X m TX
tale statistica è anche definita dal vettore dei valori medi m X e dalla matrice di correlazio-
{
}
ne RX = E XX T . Si scrive:
(VI.2.19)
X ≈ N (mX , Σ X )
È importante osservare che ogni trasformazione lineare di un vettore gaussiano produce
un vettore anch’esso gaussiano. Sia:
50
I segnali gaussiani
-51-
Y = TX + h
(VI.2.20)
un generica trasformazione lineare in cui Y denota un vettore ad m dimensioni, T la matrice di trasformazione, supposta non singolare, di dimensioni (m × n) ed h un vettore di n
dimensioni. Tenendo conto della (VI.2.9) si ha:
Y = T ( AW + b) + h = (TA)W + (Tb + h)
(VI.2.21)
che definisce un vettore gaussiano ad n dimensioni.
VI.3 – I segnali gaussiani.
Un segnale aleatorio s (t, ζ ) , a valore reale, si dice normale o gaussiano se l’insieme dei
suoi campioni presi in corrispondenza a una generica n -pla d’istanti t1, t2 , …, tn , costituisce
un vettore aleatorio gaussiano. In altri termini se, detto x = [ x1
x2
xn ] , con xi = s (ti , ζ )
T
risulta:
(VI.3.1)
ps1 , s2 …, sn ( x ) =
1
( 2π )
n
det(Σ s )
dove ms = [ ms (t1 ), ms (t2 ),…, ms (tn )]
T
exp ⎡⎣ − 12 ( x − ms )T Σ −s 1 ( x − ms ) ⎤⎦
∀n ∈ , ∀(t1 , t 2 , … , t n ) ∈
n
è un vettore la cui i -esima componente è ottenuta calco-
lando il valore medio del segnale ms (t ) = E {s (t , ζ )} nell’istante ti , e il generico elemento della
matrice Σ s
(VI.3.2)
{
}
σ s (ti , t j ) = E ⎡ s (ti , ζ ) − s (ti , ζ ) ⎤ ⎡ s (t j , ζ ) − s (t j , ζ ) ⎤
⎣
⎦⎣
⎦
esprime la covarianza delle variabili aleatorie individuate dal segnale agli istanti ti e t j .
Ci si rende facilmente conto del fatto che un segnale gaussiano stazionario in senso lato
lo è anche in senso stretto. Infatti, se il segnale è stazionario in senso lato, almeno fino al
secondo ordine, gli elementi della sua matrice di covarianza dipendono soltanto dalle differenze tra gli istanti di tempo ti e t j e il valore medio del segnale è indipendente dal tempo,
quindi tale è anche il vettore ms che compare nella sua densità di probabilità. La statistica
del segnale è allora invariante rispetto a qualsiasi traslazione dell’origine dei tempi.
Poiché dalla (VI.3.2) discende:
σs (ti , t j ) = Rs (ti , t j ) − E {s(ti , ζ)} E s(t j , ζ) = Rs (ti , t j ) − ms (ti )ms (t j )
(VI.3.3)
{
}
la funzione di covarianza può essere espressa in termini della funzione di autocorrelazione
e del valore medio; la statistica di un segnale gaussiano, quindi, risulta perfettamente nota
se si conosce il valore medio e la funzione di autocorrelazione.
VI.4 - Trasformazioni lineari di segnali gaussiani.
Sia y (t , ζ ) un segnale aleatorio dipendente dal segnale x(t , ζ ) mediante una trasformazione lineare del tipo:
(VI.4.1)
∞
y (t , ζ ) = ∫ ϕ(t , τ) x(τ, ζ )d τ
−∞
dove ϕ(t , τ) denota una funzione peso dipendente dalle variabili t e τ .
Dividendo il dominio d’integrazione nella (VI.4.1) in intervalli disgiunti di ampiezza Δ ,
l’integrale può essere calcolato mediante la:
51
-52-
G. Mamola: Fondamenti di Comunicazioni Elettriche
N
y (t , ζ ) = lim Δ ∑ ϕ(t , iΔ) x(iΔ, ζ )
(VI.4.2)
N →∞
Δ→ 0
i =− N
Valutando la precedente in t = jΔ , con j ∈
, si ottiene:
N
y ( j Δ, ζ ) = lim Δ ∑ ϕ( j Δ, iΔ ) x(iΔ, ζ )
(VI.4.3)
N →∞
Δ→ 0
j∈
i =− N
L’argomento del limite nella (VI.4.3) può essere interpretato, per fissati N e Δ , come la
componente j -esima y j = y ( j Δ, ζ ) =
N
∑ ϕ( jΔ, iΔ) x(iΔ, ζ)
di un vettore aleatorio Y ottenuto dal
i =− N
prodotto tra una matrice T il cui generico elemento è Δ ⋅ ϕ( j Δ, iΔ ) e un 2 N + 1 vettore aleatorio gaussiano la cui i -esima componente vale x(iΔ,ζ ) . Y pertanto, indipendentemente dai
valori di N e Δ , è un vettore aleatorio gaussiano e tale resta passando al limite per N → ∞
e Δ → 0 . Quindi y(t,ζ) è un segnale gaussiano, la sua densità di probabilità, a qualunque
ordine, dipende soltanto dal valor medio e dalla funzione di autocorrelazione.
Dalla (VI.4.1), prendendo il valore medio statistico di ambo i membri, si ha, con ovvio
significato dei simboli:
(VI.4.4)
∞
∞
−∞
−∞
my (t ) = E { y (t , ζ )} = ∫ ϕ(t , τ) E { x(τ, ζ )} d τ = ∫ ϕ(t , τ)mx (τ)d τ
La funzione di autocorrelazione vale:
Ry (t1 , t2 ) = E { y (t1 , ζ ) y (t2 , ζ )} =
=E
(VI.4.5)
=∫
{∫
∞
∞
−∞
∫
=∫ ∫
∞
−∞ −∞
∞
∞
−∞ −∞
}
∞
ϕ(t1 , τ1 ) x (τ1 , ζ )d τ1 ∫ ϕ(t2 , τ2 ) x(τ2 , ζ )d τ2 =
−∞
E { x(τ1 , ζ ) x(τ2 , ζ )} ϕ(t1 , τ1 )ϕ(t2 , τ 2 )d τ1d τ2 =
Rx (τ1 , τ2 )ϕ(t1 , τ1 )ϕ(t2 , τ2 )d τ1d τ2
avendo denotato con Rx (t1 , t2 ) la funzione di autocorrelazione di x(t,ζ ) .
Sia a(ζ ) una variabile aleatoria dedotta da un segnale x(t,ζ ) gaussiano mediante una
trasformazione lineare della forma:
(VI.4.6)
∞
a(ζ ) = ∫ ϕ(τ) x(τ, ζ )d τ
−∞
essendo ϕ(τ) una funzione peso. Procedendo come prima e cioè dividendo il dominio
d’integrazione nella (VI.4.6) in intervalli disgiunti di ampiezza Δ , l’integrale può essere calcolato mediante la:
(VI.4.7)
N
a (ζ ) = lim Δ ∑ ϕ(iΔ) x(i Δ, ζ )
N →∞
Δ→ 0
i =− N
Per fissati N e Δ è immediato riconoscere che la quantità a(ζ) , in quanto combinazione
lineare di quantità congiuntamente gaussiane, è una variabile aleatoria gaussiana la cui
densità di probabilità del primo ordine dipende dal valor medio e dalla funzione di autocorrelazione.
Dalla (VI.4.6), prendendo il valore medio statistico di ambo i membri, si ha:
(VI.4.8)
e:
52
∞
∞
−∞
−∞
ma = E {a(ζ )} = ∫ ϕ(τ) E { x(t , ζ )} d τ = ∫ ϕ(τ)mx (τ)d τ
I segnali gaussiani
{
}
Ra2 = E a 2 (ζ ) =
=E
(VI.4.9)
=∫
{∫
∞
∞
−∞
∫
=∫ ∫
∞
−∞ −∞
∞
∞
−∞ −∞
∞
-53-
}
ϕ(τ1 ) x(τ1 , ζ )d τ1 ∫ ϕ(τ2 ) x(τ2 , ζ )d τ2 =
−∞
E { x(τ1 , ζ ) x(τ2 , ζ )} ϕ(τ1 )ϕ(τ2 )d τ1d τ2 =
Rx (τ1 , τ2 )ϕ(τ1 )ϕ(τ2 )d τ1d τ2
53
-54-
G. Mamola: Fondamenti di Comunicazioni Elettriche
APPENDICE
Ortogonalizzazione della matrice di covarianza.
Sia {λ i }i =1 l’insieme degli autovalori (supposti distinti) della matrice di covarianza Σ di
n
una vettore gaussiano X . Se ui rappresenta l’autovettore (supposto normalizzato) corrispondente all’autovalore λ i si ha:
Σui = λ i ui
(1)
Sia U la matrice composta da tutti gli autovettori e cioè:
⎡ ⎡ u11 ⎤ ⎡ u21 ⎤
⎢⎢ ⎥ ⎢ ⎥
u
u
(2)
U = [ u1 u2
un ] = ⎢ ⎢ 12 ⎥ ⎢ 22 ⎥
⎢⎢ ⎥ ⎢ ⎥
⎢⎢ ⎥ ⎢ ⎥
⎢⎣ ⎣u1n ⎦ ⎣u2 n ⎦
in cui uij rappresenta la componente j -esima del vettore ui .
ΣU = [ Σu1 Σu1
(3)
dove diag(λ1 , λ 2 ,
(4)
⎡ ⎡ λ1u11 ⎤
⎢⎢
λu ⎥
= ⎢ ⎢ 1 12 ⎥
⎢⎢
⎥
⎢⎢
⎥
⎣⎢ ⎣λ1u1n ⎦
Σun ] = [ λ1u1
⎡ λ 2 u21 ⎤
⎢λ u ⎥
⎢ 2 22 ⎥
⎢
⎥
⎢
⎥
⎣ λ 2 u2 n ⎦
⎡ ⎡ u11 ⎤ ⎡ u21 ⎤
⎢⎢ ⎥ ⎢ ⎥
u
u
= ⎢ ⎢ 12 ⎥ ⎢ 22 ⎥
⎢⎢ ⎥ ⎢ ⎥
⎢⎢ ⎥ ⎢ ⎥
⎣⎢ ⎣u1n ⎦ ⎣u2 n ⎦
= U diag(λ1 , λ 2 ,
⎡ λ n un1 ⎤ ⎤
⎢λ u ⎥ ⎥
⎢ n n2 ⎥ ⎥ =
⎢
⎥⎥
⎢
⎥⎥
⎣ λ n unn ⎦ ⎦⎥
⎡ un1 ⎤ ⎤ ⎡λ1
⎢u ⎥ ⎥ ⎢ 0
⎢ n2 ⎥ ⎥ ⎢
⎢ ⎥⎥ ⎢
⎢ ⎥⎥ ⎢
⎣ unn ⎦ ⎥⎦ ⎣ 0
54
0⎤
0 ⎥⎥
=
⎥
⎥
λn ⎦
0
λ2
0
, λn )
, λ n ) denota la matrice diagonale
diag(λ1 , λ 2 ,
⎡ λ1
⎢0
, λn ) = ⎢
⎢
⎢
⎣0
0⎤
0 ⎥⎥
⎥
⎥
λn ⎦
0
λ2
0
U −1ΣU = diag(λ1 , λ 2 ,
, λn )
da cui:
(6)
λ n un ]
λ 2 u1
Dalla (3) si deduce, premoltiplicando per U −1 :
(5)
⎡ un1 ⎤ ⎤
⎢u ⎥ ⎥
⎢ n2 ⎥ ⎥
⎢ ⎥⎥
⎢ ⎥⎥
⎣ unn ⎦ ⎥⎦
Si ha:
Σ = U diag(λ1 , λ 2 ,
, λ n )U −1