Programmi motori e “Central
Governor Model”
Programmi Motori
• Il rapporto con l’ambiente è possibile
attraverso comportamenti motori la cui
efficacia è in rapporto, tra l’altro, ad un
complesso sistema di integrazione centrale
che prende il nome di “Controllo Motorio
Centrale”
I diversi movimenti umani
• I movimenti possono essere ordinati gerarchicamente su
una scala che va da quelli automatici, stereotipati e rapidi
ad un estremo a quelli relativamente lenti flessibili/adattabili
e controllati volontariamente all’altro.
• Su questa scala, i movimenti riflessi sarebbero piazzati ad
un estremo e quelli volontari e fini (ad es.: infilare un ago)
all’altro .
Movimenti
riflessi
La maggior parte dei
movimenti della vita
quotidiana
Movimenti
fini, abili
• La maggior parte delle attività quotidiane si pone tra
questi due estremi.
• In questo modo attività molto differenti come
dipingere e zappare la terra dipendono sia da un
certo grado di controllo cosciente sia, nello stesso
tempo, dall’attività di proprietà inconsce / riflesse
quali la rapidità di attivazione, la stereotipia e
l’automaticità.
• Molti movimenti fini coscienti che richiedono abilità e
precisione possono utilizzare dei componenti che
sono automatici e stereotipati . Guidare una
macchina è un’azione che richiede un alto livello di
coscienza e controllo ma alcuni movimenti quali
premere la frizione, una volta appresi, possono
essere stereotipati.
Complessità dei movimenti
• La complessità dei movimenti non isolati è dovuta al
fatto che
– L’attività coinvolge simultaneamente parecchie articolazioni
– Molti muscoli diversi sono coinvolti nella genesi di anche un
solo singolo movimento (es.: flessione o estensione) a livello
di una singola articolazione
– Alcuni muscoli attraversano due articolazioni e perciò
possono avere azioni multiple
– I movimenti hanno aspetti “sequenziali” sia in termini di
successione temporale ( precisa durata di attivazione definita
e diversa per i vari muscoli) sia in termini di livello ed
accuratezza nella produzione di forza
– Questa complessità implica che, anche per un’attività
apparentemente semplice quale tirare un calcio, l’insieme di
istruzioni muscolari sia esteso e complesso
Una domanda importante
• Il quesito centrale rispetto al controllo del movimento è “come fa
il SNC a produrre questi complessi insiemi di istruzioni per
regolare i movimenti?”
• Ricava le istruzioni disegnando uno schema ex novo ogni volta
che compiamo un movimento?
• O sfrutta una serie di componenti già presenti in una sorta di
“magazzino” di patterns motori che possono essere appresi e/o
ereditati?
• Se si basa su questo “magazzino”, che livello di complessità
hanno le istruzioni immagazzinate? Sono dei semplici
componenti che devono essere assemblati tra loro per costituire
comportamenti motori utilizzabili o sono dei comportamenti
motori già definiti nel loro insieme ?
Teoria del Programma Motorio
• molti movimenti umani sembrano essere altamente
automatizzai e “pre-programmati” es.: salire le scale,
alzarsi in piedi, calciare o lanciare una palla, pedalare
• In tali azioni sembra come se l’attività sia scatenata,
da processi decisionali del SNC e poi “vanno avanti
da sole” senza necessità di un grande controllo
cosciente
Teoria del Programma Motorio
• La Teoria del Programma Motorio prevede che il
SNC contenga dei “sets di istruzioni” per i movimenti
che sono utilizzati regolarmente.
• L’analogia più comunemente utilizzata è quella con i
programmi software che danno le istruzioni ad un
computer per eseguire compiti specifici.
• La teoria implica che i movimenti siano “prestrutturati” ma essi sono evidentemente non del tutto
stereotipati– vi è una certa flessibilità precostituita
che si adatta alle diverse circostanze ambientali
Proprietà dei Programmi Motori
• Istruzioni anticipatorie specificano l’operazione che
deve essere compiuta sia come sequenza che come
tempi
• Una volta che il programma è stato lanciato continua
sino al suo termine (è difficile modificarlo od anche
arrestarlo mentre è in corso)
• Il programma opera in maniera largamente
indipendente dall’informazione sensoriale (è “openloop”)
Prove a favore dell’esistenza di
Programmi Motori
• In generale non è possibile identificare una data
porzione del SNC, o particolari gruppi di neuroni che
contengano programmi motori specifici
• Ciò può essere dovuto alla mancanza di tecniche di
indagine sufficientemente sofisticate o perché i
programmi motori non sono specificatamente
localizzati in una singola area, o per entrambe le
ragioni.
• Vi sono tuttavia prove indirette che implicano
fortemente l’esistenza di programmi motori
prova I:
Relazioni tra complessità del
movimento e tempo di reazione (RT)
• Il RT ad uno stimolo specifico dipende dalla
complessità della risposta richiesta.
• I movimenti di risposta aventi le seguenti
caratteristiche hanno RT più lunghi:
– Coinvolgimento di più di un arto
– Durata di esecuzione più lunga
– Numero di articolazioni coinvolte maggiore
L’ esperimento di Henry & Rogers (1960)
•
3 diversi tempi di risposta (sollevare un singolo dito da un’interuttore)
allo stesso stimolo (gong)
1. singolo dito che si solleva da un’interuttore elettronico + nessuna
azione associata
2. singolo dito che si solleva da un’interuttore elettronico + veloce
afferramento di una pallina da tennis sospesa ad uno spago
3. singolo dito che si solleva da un’interuttore elettronico +
movimento complesso che coinvolge il colpire due palline da
tennis e schiacciare un bottone
•
RT (ms) medi associati :
1. 150
2. 195
3. 208
•
La conclusione è che l’attivazione di programmi motori che prevedono
risposte più complesse (“programmazione della risposta”) è più lunga
e perciò si allunga il RT totale
prova II: Deafferentazione
• Tagliando le fibre sensitive a livello delle radici dorsali,
all’emergenza del midollo, si impedisce all’informazione
propriocettiva proveniente dal sistema somatosensoriale di
raggiungere il SNC.
• Le scimmie deafferentate sono tuttavia in grado di portare a
termine la maggior parte delle attività in modo sufficientemente
accurato : es. arrampicarsi, mangiare, spulciarsi
• Questi movimenti non si basano molto sul feedback sensoriale
propriocettivo per la loro esecuzione che viene conseguita
attraverso programmi motori
• Molto diverso è il caso dei movimenti fini ed abili quali la
manipolazione di oggetti con le dita, il che indica in questi casi
un ruolo maggiore per il feedback sensoriale e un
corrispondente ruolo inferiore per i programmi motori.
prova III:
Patterns EMG durante il blocco di movimenti
• Esperimento tipico:
– I soggetti vengono allenati a muovere
rapidamente una leva tra due posizioni usando il
braccio
– L’EMG viene registrato durante tali movimenti.
Senza che il soggetto lo sappia qualche volta (in
maniera casuale) la leva viene bloccata in una
delle due posizioni in modo che il soggetto non la
possa più muovere.
– Nonostante ciò i patterns EMG che ne risultano
sono praticamente identici sia per i movimenti
bloccati che per quelli non bloccati
Cosa fanno i programmi motori?
• Per un singolo comportamento motorio il programma
motorio specifica :
–
–
–
–
Quali muscoli sono coinvolti
L’ordine di attivazione dei muscoli
La forza di contrazione relativa dei diversi muscoli
La temporizzazione e la sequenza di attività dei diversi
muscoli (quando e per quanto tempo)
– La durata di attivazione dei diversi muscoli (per quanto
tempo ogni singolo muscolo)
Programmi Motori e Aggiustamenti Posturali
• Nella maggior parte dei movimenti, la primissima
attività muscolare si registra a livello di regioni
corporee per nulla coinvolte nel movimento stesso
• Es.: quando si solleva il braccio l’azione è preceduta
da attività muscolare a livello lombare e degli arti
inferiori.
• Questa attivazione rappresenta degli “Aggiustamenti
Posturali ” il cui scopo è di prevenire che il
movimento che segue disturbi l’equilibrio del corpo*
*sollevare il braccio modifica l’equilibrio sollevando il centro di massa e
provocando un momento torcente a livello del tronco
• Gli Aggiustamenti Posturali sono in gran parte inconsci
• Fanno parte integrale dei programmi motori che prevedono i
rispettivi movimenti
• Gli Aggiustamenti Posturali “anticipano” il disturbo dell’equilibrio
che verosimilmente i movimenti seguenti saranno in grado di
produrre e non richiedono in sé un feedback sensoriale
• Un feedback sensoriale sottoforma di riflessi posturali, può
tuttavia essere utilizzato una volta che il movimento è in corso
per la messa a punto fine (“fine-tuning”) degli aggiustamenti
posturali anticipatori.
• Se il soggetto si appoggia ad una parete od ad un altro supporto
gli aggiustamenti posturali sono molto inferiori il che indica una
flessibilità precostituita dei programmi motori
Programmi Motori e Central Pattern
Generators (CPGs)
• CPGs sono una classe particolare di programmi
motori
• Producono i patterns necessari per attività semplici,
di solito ritmiche, quali la locomozione,la
masticazione, la deglutizione, la respirazione
• La differenza principale tra i CPGs e altri programmi
motori è che i CPGs sono in gran parte se non del
tutto geneticamente-determinati, mentre programmi
motori più complessi sono appresi
• A causa della loro relativa semplicità, è stato
possibile identificare (nelle specie con SN più
semplice – invertebrati) circuiti neuronali specifici che
sottostanno ad alcuni CPGs.
• Ciò non è stato ancora possibile con programmi
motori appresi più complessi.
• Pertanto conosciamo meglio i CPGs dei programmi
motori meno complessi
Central Pattern Generators CPG
• Sono definiti come “circuiti neuronali geneticamente
determinati che producono patterns motori coordinati
in assenza di feedback sensoriale e in risposta ad
inputs brevi o tonici”
• I CPGs variano molto per organizzazione neurale e
proprietà
• molti CPGs sono allocati nel midollo spinale (ad es.:
locomozione) ma alcuni sono allocati nelle parti
profonde del SNC (ad es.: respirazione)
CPGs e riflessi
• Non vi è una distinzione netta e precisa tra un riflesso
complesso ed un CPG, sia in termini di comportamento motorio
prodotto che di circuiteria neuronale sottostante.
• Alcuni movimenti che prima erano considerati riflessi
(grattamento) ora si pensa siano prodotti da CPGs
• Il riflesso miotattico è tuttavia non controllato da un CPG – la
sua circuiteria neuronale è di gran lunga troppo semplice.
• Il riflesso di evitamento flessorio coinvolge una sequenza di
movimenti a livello di tre differenti articolazioni (ed una serie di
azioni controlaterali) ed è basato su una circuiteria neuronale
relativamente complessa per cui è controverso se sia o no un
CPG.
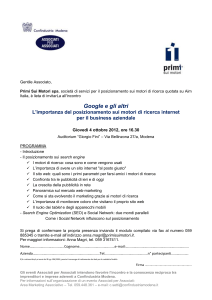
Clione:
la farfalla di
mare
Il parapodio a pinna (lato
superiore) è fatto
ondeggiare su e giù per
produrre la locomotzione
CPG natatorio nel mollusco
Clione
• è il CPG più semplice
possibile
• Due neuroni,
producono movimenti
antagonistici della pinna
•Ciascuno produce un
PA che dura ca. 100 ms
• L’inibizione reciproca fa
sì che mentre una cellula
è attiva l’altra sia inibita
(NB nei mammiferi non
esistono singole cellule
che producono effetti
inibitori ed eccitatori)
•“rebound postinibitorio” la cellula
diviene più eccitabile dopo che è
stata inibita (la soglia si abbassa)
CPGs ritmici
•La maggior parte dei CPGs noti producono patterns di
movimento ritmici (cammino, nuoto, peristalsi)
•Nei CPGs ritmici, gruppi muscolari meccanicamente
opposti lavorano in coordinazione, di solito alternando la
loro attività
•Ciò richiede una rete neuronale
•Gruppi differenti di neuroni innervano muscoli differenti
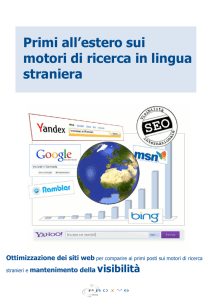
Modello del “Semi-Centro” di Brown
mm. flessori
Input discendente
o afferente
mm. estensori
CPG
motoneuroni
•I neuroni inibitori (rossi) forniscono l’inibizione reciproca.
•Il circuito fornisce l’attivazione alternata di estensori e flessori.
CPG e locomozione umana
• Sebbene manchi una prova diretta sembra certo che vi sia un
CPG spinale per la locomozione umana
• Tra le prove vi è il fatto che patterns locomotori come il riflesso
reciproco di contrazione permangono nei pazienti paraplegici
• Il CPG è probabilmente distribuito lungo vari metameri del
midollo spinale piuttosto che concentrato in un area specifica
• Ciò non sorprende date:
– La nostra origine evolutiva da animali quadrupedi
– La distanza tra le aree del midollo da cui originano i nervi e gli arti
Vi sono 3 aspetti di ciascun CPG che contribuiscono al
patterns eccitatorio globale che produce:
1. Le proprietà cellulari dei singoli neuroni
2. Le proprietà delle connessioni sinaptiche
interneuronali (eccitatorie o inibitorie, con influenza
forte o debole)
3. Le modalità di interconnessione tra i neuroni
(questi aspetti influiscono anche sui programmi motori più complessi)
Neuroni Generatori
• I neuroni generatori sono in grado di produrre spontaneamente
potenziali di azione (ritmo cardiaco nel nodo seno-atriale) con
un meccanismo cellulare (che dipende dalle caratteristiche
specifiche di ciascuna cellula) di questo tipo:
• Tipicamente la membrana cellulare dei neuroni generatori è più
permeabile ai cationi extracellulari.
• Questi cationi pertanto penetrano lentamente all’interno e
depolarizzano la cellula
• Quando viene raggiunto il potenziale soglia, il neurone
generatore scarica uno o più potenziali di azione.
• La ripolarizzazione riporta il potenziale di membrana al suo
valore originario e riprende l’ingresso lento di cationi che
innesca un nuovo ciclo di depolarizzazione
Potenziali
generatori nel
nodo seno atriale
(coniglio)
Notare la
depolarizzazione
spontanea graduale
tra i potenziali di
azione
• Ciascun CPG è tipicamente composto da un
certo numero di neuroni generatori. Il ritmo
complessivo si deve alle loro interazioni
• L’ output dei neuroni generatori è poi
ulteriormente modificato da altri neuroni
all’interno del CPG, soprattutto mediante
interconnessioni e caratteristiche delle varie
sinapsi, al fine di produrre il pattern di
comando voluto per i diversi motoneuroni
interessati al comportamento motorio
previsto.
Neuroni di Comando
• I Neuroni di Comando, localizzati nei “centri
superiori” del SNC, possono influire sui CPG in vari
modi:
– Attivandoli (“accesi”)
– Deattivandoli (“spenti”)
– Regolandoli parametricamente
Modulazione Sensoriale
• Per definizione, i CPG possono produrre specifici
patterns eccitatori indipendentemente dall’input
sensoriale afferente.
• L’input sensoriale è tuttavia necessario per il
funzionamento corretto dei CPG
• L’informazione sensoriale serve particolarmente per:
– Contribuire alla generazione ed al mantenimento dell’attività
ritmica
– Iniziare le fase di transizione
– Regolare la grandezza dell’attività in corso
– Modificare l’intensità delle risposte riflesse
Modulazione Sensoriale :
a) genera e mantiene l’attività ritmica
• Un CPG è in grado di produrre un output riconoscibile anche se
è disconnesso dall’input sensoriale, da quello proveniente dai
centri superiori e da quello proveniente dai muscoli che innerva.
• La presenza di questo output è necessaria per classificare un
circuito neurale come CPG
• In queste condizioni tuttavia il pattern motorio deve essere
attivato artificialmente: nell’animale intatto è il feedback
sensoriale che contribuisce all’attivazione
• Una volta attivato l’output del CPG può essere relativamente
normale in quanto a ritmo ma gli altri aspetti del pattern motorio
sono completamente diversi e divengono normali solo se è
disponibile il feedback sensoriale.
Modulazione Sensoriale :
b) inizia la fase di transizione
• Vi è evidenza che la transizione tra la fase di stance e quella di
swing durante la locomozione è regolata da:
– grado di estensione dell’anca segnalato al SNC dalla scarica dei
fusi muscolari
– Gli organi tendinei del Golgi degli estensori rinforzano l’attività dei
muscoli in cui sono localizzati (NB un rovesciamento del normale
effetto inibitorio dell’attività degli o. di Golgi).
• L’abilità del CPG di “alternare” l’influenza dell’input afferenziale
degli o. del Golgi da eccitatoria ad inibitoria è un esempio di
come gli interneuroni possano essere usati da parte del SNC ad
un livello strategico.
Modulazione Sensoriale :
c) regola l’intensità dell’attività in corso
• Il feedback sensoriale rinforza l’attività in
muscoli che sono già attivi.
• La modificazione del riflesso da stiramento
durante la fase di stance del cammino ne è
un esempio.
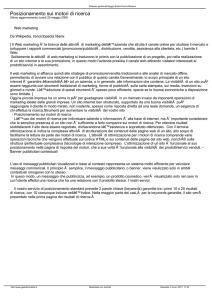
feedback afferente e
modello del
semicentro di Brown
linee blu : feedback afferente dai
fusi muscolari (Ia, II) e dai c.
tendinei del Golgi (Ib)
Rosso: interneuroni inibitori
Verde: motoneuroni
Nero pieno: interneuroni eccitatori
Nero vuoto : neuroni generatori
CPG
Feedback afferente e
modello del semi centro
Via 1: connessioni
monosinaptiche eccitatorie dai fusi
muscolari afferenti ai motoneuroni
estensori (“riflesso di stiramento”)
Rinforzo della trasmissione sinaptica
nella fase di stance
Aiutano ad incrementare l’
attività estensoria nella fase di
stance
Feedback afferente e
modello del semi centro
Via 2: connessioni disinaptiche
inibitorie dai c. di Golgi ai moto
neuroni estensori (es.:“riflesso
di stiramento”)
I c. di Golgi hanno un “ruolo
protettivo” nel prevenire i
danni da eccessiva
produzione di forza da parte
del muscolo.
Feedback afferente e
modello del semi centro
Via 3: connessione eccitatoria
disinaptica dalle afferenze del fuso
muscolare e dai c. Di Golgi (NB
Golgi in questo momento ha
un’influenza eccitatoria)
Agisce attraverso l’ interneurone
eccitatorio, che è attivo durante la fase
di stance grazie agli imput provenienti
dal CPG, che funge da interuttore sulla
Via 3
Aiuta ad incrementare l’attività
estensoria nella fase di stance
Feedback afferente e
modello del semi centro
Via 4: attivazione polisinaptica del
CPG del semicentro estensorio
grazie alle afferenze a feedback
dalle fibre afferenti Ia e II
Aiuta ad incrementare l’ attività
estensoria nella fase di stance
Feedback afferente e
modello del semi centro
Via 5: il Feedback dai fusi dei
flessori di anca e caviglia
determina il punto di transizione
dalla fase di stance a quella di
swing.
Nota: la fine della fase di stance
avviene quando I flessori sono stirati
ad un determinato livello soglia
La Via è attiva solo durante la fase
di stance.
Feedback afferente e
modello del semi centro
Queste vie sono un esempio di
come i CPGs sono in grado di
usare le informazioni afferenti per
produrre effetti diversi nei
differenti stadi di un
movimento.
Lo fanno “accendendo” e
“spegnendo” diversi circuiti
neuronali a cui i neuroni afferenti
forniscono l’input.
Gli interneuroni sono un elemento
cruciale che consente questa
alternanza
Come si inseriscono i programmi motori
ed i CPG nello schema generale
• In termini di “livelli” di organizzazione motoria, i
programmi motori sono localizzati tra i centri cerebrali
superiori ed i moto neuroni.
• La regolazione da parte dei centri superiori prevede
la loro:
– “accensione” e “spegnimento”
– regolazione dei parametri generali quali la velocità della
locomozione o la frequenza e la profondità della
respirazione.
Stimoli esterni od interni
Altri centri motori
Centri superiori
La gerarchia
del controllo
motorio
CPG/ programmi motori
motoneuroni
(Verde: feedback sensoriale )
muscoli
Comportamento motorio