")
7.6 Distribuzione Esponenziale.
111
7.6. Distribuzione Esponenziale.
Un n.a. continuo X con densità di probabilità
(
λe−λx se x ≥ 0,
(76)
f (x) =
λ ∈ R+
0
se x < 0,
si dice che ha distribuzione esponenziale di parametro λ e si indica con
X ∼ Exp(λ).
La distribuzione esponenziale viene utilizzata ad esempio quando X rappresenta
• il tempo di durata di un dispositivo (non soggetto ad usura);
• il tempo di attesa del verificarsi di un certo evento (arrivo di un
cliente in una coda, arrivo di una telefonata).
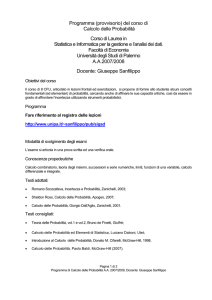
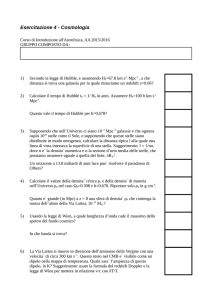
F IGURA 7.3. Densità Esponenziale
L’area sotto la curva y = f (x) al crescere del parametro λ si concentra
sempre più verso l’origine.
Ricordiamo che l’area totale sotto la curva è uguale a 1. Infatti
R +∞
−∞
f (x) =
R +∞
0
λe−λx dx = [−e−λx ]+∞
= 1.
0
La distribuzione esponenziale è l’analogo nel continuo della distribuzione
geometrica. Infatti nel discreto il tempo di attesa può esser visto come il
numero di prove necessarie per il verificarsi di un evento (numero di lanci
di una moneta fino a quando per la prima volta esce testa).
La funzione di ripartizione è data da
(R x
λe−λt dt , se x > 0,
0
F (x) =
0,
se x ≤ 0.
G.Sanfilippo
7.6 Distribuzione Esponenziale.
Osservando che
Rx
0
112
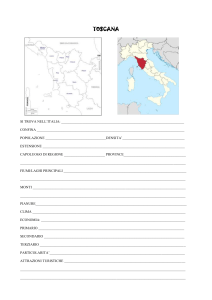
λe−λt dt = [−e−λt ]x0 = 1 − e−λx , si ottiene
(
1 − e−λx , se x > 0,
F (x) =
0,
se x ≤ 0.
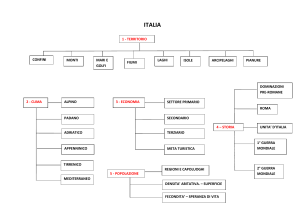
F IGURA 7.4. Funzione di Ripartizione della distribuzione Esponenziale
La funzione S(x) = 1 − F (x) = P (X > x), detta funzione di sopravvivenza, è data da
(
e−λx , se x > 0,
S(x) =
1,
se x ≤ 0,
La previsione è
R +∞
P(X) = 0 xλe−λx dx = · · · = λ1 ,
mentre
R +∞
P(X 2 ) = 0 x2 λe−λx dx = · · · =
Quindi la varianza e lo scarto sono rispettivamente
V ar(X) = P(X 2 ) − [P(X)]2 =
σX = λ1 .
2
λ2
1
λ2
.
,
Lo scarto quadratico medio coincide con la previsione.
Nota: il calcolo diretto della previsione e della varianza di X si può evitare utilizzando la funzione Gamma (vedi distribuzione beta).
Proprietà di Assenza di memoria. Un numero aleatorio continuo e non
negativo X ha distribuzione esponenziale se e solo se vale la seguente
proprietà (detta di assenza di memoria)
(77)
P (X > x0 + x|X > x0 ) = P (X > x), ∀x0 , x ∈ R+
0.
Se X rappresenta il tempo (aleatorio) fino al guasto di un dispositivo, la
proprietà di assenza di memoria ha il seguente significato: supposto che il
G.Sanfilippo
7.6 Distribuzione Esponenziale.
113
dispositivo non si guasti sino al tempo x0 , la probabilità che non si guasti per
un ulteriore tempo x è la stessa che il dispositivo non si guasti nell’intervallo
[0, x].
Tale proprietà è valida per le apparecchiature che, durante il loro funzionamento, non sono soggette ad usura (o, più realisticamente, quando l’usura è
trascurabile).
dim.(⇒) Hp) X ∼ Exp(λ); Th) vale la (77).
P (X > x0 + x|X > x0 ) =
P (X>x0 +x,X>x0 )
P (X>x0 )
=
−λ(x +x)
0 +x)
0 +x)
= S(x
= e e−λx0 0 = e−λx =
= PP(X>x
(X>x0 )
S(x0 )
= S(x) = P (X > x) .
(⇐)Hp) vale la (77); Th) X ∼ Exp(λ).
Da quanto visto nella precedente dimostrazione la proprietà di assenza di
memoria si può scrivere anche come:
S(x0 + x)
= S(x) ,
S(x0 )
cioè
S(x + x0 ) = S(x)S(x0 ) .
Essendo la funzione di sopravvivenza definita come 1 − F (x), con F (x)
crescente, allora S(x) è positiva e decrescente e quindi
S(x) > 0, S 0 (x) < 0, ∀x ∈ R.
Osserviamo che
S 0 (x+x0 )
S(x+x0 )
quindi
=
S(x0 )S 0 (x)
S(x0 )S(x)
=
S 0 (x)
S(x)
= −λ, λ > 0,
0
(x)
D[ln(S(x))] = SS(x)
= −λ ⇒
ln(S(x)) = −λx + k ,
allora
S(x) = e−λx ek .
Essendo X un n.a. non negativo, si ha S(0) = 1, per cui ek = 1. Allora
S(x) = e−λx ,
ovvero X ∼ Exp(λ).
G.Sanfilippo
7.7 Distribuzione normale standard
114
7.7. Distribuzione normale standard
Un n.a. continuo X, con densità di probabilità
2
(78)
f (x) =
x
√1 e− 2
2π
, x ∈ R,
si dice che ha distribuzione normale standard (di parametri 0,1) e si indica
con X ∼ N0,1 = N . La densità f (x) si indica con N (x), mentre la funzione di ripartizione F (x) si indica con Φ(x). Di tale funzione non è possibile
dare un’espressione, ma si possono cercare soltanto alcuni valori riportati
su apposite tavole.
Alcune proprietà:
1. il diagramma della densità ha un andamento a forma di campana (con
il massimo nell’origine e due flessi in x = −1, x = 1) ed è simmetrico
rispetto all’asse y, cioè N (x) è una funzione pari (N (−x) = N (x));
2. dalla simmetria di N (x), per ogni x ∈ R si ha Φ(−x) = 1 − Φ(x),
e quindi
Rx
P (|X| ≤ x) = P (−x ≤ X ≤ x) = −x N (t)dt =
= Φ(x) − Φ(−x) = 2Φ(x) − 1 ;
P (|X| > x) = 1 − P (|X| ≤ x) = 2[1 − Φ(x)] ;
3. in particolare
Φ(1) ' 0.8413 , Φ(2) ' 0.9772 , Φ(3) ' 0.9987 ,
e quindi
P (|X| ≤ 1) = 2Φ(1) − 1 ' 0.6826 ;
P (|X| ≤ 2) = 2Φ(2) − 1 ' 0.9544 ;
P (|X| ≤ 3) = 2Φ(3) − 1 ' 0.9974 .
Calcoliamo la previsione di X. Osservando che xN (x) è una funzione
dispari si ha
R +∞
R0
R +∞
x2
x2
x2
P(X) = −∞ x √12π e− 2 dx = −∞ x √12π e− 2 dx + 0 x √12π e− 2 dx =
R0
R +∞
y2
x2
(posto y = −x) = − +∞ y √12π e− 2 (−dy) + 0 x √12π e− 2 dx =
R +∞
R +∞
y2
x2
= − 0 y √12π e− 2 dy + 0 x √12π e− 2 dx = 0 .
Oppure, poichè
R +∞
0
x2
x √12π e− 2 dx =
R +∞
0
√1 e−t dt
2π
si ha
P(X) = − √12π +
G.Sanfilippo
√1
2π
= 0.
=
√1
2π
,
7.8 Distribuzione Normale
115
Si può verificare che
2
Z
+∞
x2 N (x)dx = · · · = 1 ,
P(X ) =
−∞
e quindi:
V ar(X) = P(X 2 ) = 1 .
7.8. Distribuzione Normale
In generale, si dice che X ha una distribuzione normale di parametri m, σ,
con m ∈ R, σ > 0, se la densità di X ha la seguente forma:
(79)
f (x) = Nm,σ (x) =
√ 1 e−
2π σ
(x−m)2
2σ 2
, x ∈ R.
In simboli, si scrive: X ∼ Nm,σ . La funzione di ripartizione si indica con
Φm,σ (x).
Il diagramma della densità ha un andamento a forma di campana (con il
massimo in x = m e due flessi in x = m − σ, x = m + σ) ed è simmetrico
rispetto alla retta x = m.
Dato un numero aleatorio X ∼ Nm,σ consideriamo il numero aleatorio
Y = aX + b, con a > 0, b ∈ R. Si ha Y ∼ Nam+b,aσ . Infatti, indicando con
G la funzione di ripartizione di Y e g la sua densità, si ha:
G(y) = P (Y ≤ y) = P (X ≤
y−b
y−b
) = Φm,σ (
),
a
a
e quindi
g(y) = G0 (y) = Φ0m,σ (
(
1 1
= √
e−
a 2π σ
2
y−b
a −m
2
2σ
)
y−b 1
y−b 1
) · = Nm,σ (
)· =
a
a
a
a
2
(y−my )
(y−(am+b))2
−
1
1
−
2
2(aσ)2
=√
e
=√
e 2σy =
2π aσ
2π σy
= NmY ,σY (y) ,
dove
(80)
mY = am + b ,
σY = aσ .
Pertanto Y ∼ Nmy ,σy . Se invece consideriamo il numero aleatorio Y =
aX +b, con a < 0, b ∈ R si può dimostrare, procedendo in maniera analoga
a quanto fatto nel caso a > 0, che risulta Y ∼ NmY ,σY , con
(81)
mY = am + b ,
σY = −aσ .
In altri termini, se dal n.a. X, con distribuzione normale, si passa al n.a.
G.Sanfilippo
7.8 Distribuzione Normale
116
Y = aX + b, con a 6= 0, la distribuzione rimane di tipo normale, con i parametri che cambiano come indicato nella (80), oppure (81). In particolare,
se Z = aX + b, con a = σ1 , b = − m
, ovvero Z = X−m
, si ha
σ
σ
1
m
1
(82)
mZ = m + (− ) = 0 , σZ = σ = 1 ,
σ
σ
σ
cioè la distribuzione di Z è una normale standard, ovvero Z ∼ N0,1 . Allora,
, si ha P(Z) = 0, σZ = 1, e che X =
tenendo conto che, se Z = X−m
σ
σZ + m, si ottiene
2
P(X) = P(σZ + m) = m, σX
= V ar(σZ + m) = σ 2 .
Pertanto i parametri m, σ di un numero aleatorio X ∼ Nm,σ sono rispettivamente la previsione e lo scarto quadratico medio. Lo stesso risultato si
può ottenere con calcoli diretti, verificando che
Z +∞
xNm,σ (x)dx = · · · = m ,
P(X) =
Z
−∞
+∞
V ar(X) =
(x − m)2 Nm,σ (x)dx = · · · = σ 2 .
−∞
Sia X ∼ Nm,σ , e per ogni x ∈ R consideriamo l’evento (X ≤ x). Si ha
X −m
x−m
(X ≤ x) ⇐⇒
≤
.
σ
σ
Inoltre, poichè
X −m
Z=
∼ N0,1 ,
σ
si ha
Φm,σ (x) = P (X ≤ x) = P X−m
≤ x−m
= P Z ≤ x−m
= Φ( x−m
).
σ
σ
σ
σ
Inoltre, per ogni k > 0, si ha
P (|X − m| ≤ kσ) = P (m − kσ ≤ X ≤ m + kσ) =
= Φm,σ (m + kσ) − Φm,σ (m − kσ) = Φ( m+kσ−m
) − Φ( m−kσ−m
)=
σ
σ
Φ(k) − Φ(−k) =
= 2Φ(k) − 1 .
In particolare
• P (m − σ ≤ X ≤ m + σ) = 2Φ(1) − 1 = 0.6826
• P (m − 2σ ≤ X ≤ m + 2σ) = 2Φ(2) − 1 = 0.9544
• P (m − 3σ ≤ X ≤ m + 3σ) = 2Φ(3) − 1 = 0.9974
• P (m − 1.96σ ≤ X ≤ m + 1.96σ) = 2Φ(1.96) − 1 = 0.95
Come mostrano le formule precedenti, utilizzando le tavole della distribuzione normale standard è possibile calcolare i valori di una distribuzione
normale con parametri m, σ arbitrari.
G.Sanfilippo
7.10 Distribuzione Beta.
117
7.9. Funzione Gamma
La funzione Γ(·) è cosı̀ definita
Z +∞
(83)
Γ(α) =
xα−1 e−x dx, ∀α ∈ R+ .
0
Applicando l’integrazione per parti a Γ(α + 1) si ottiene
Γ(α + 1) = αΓ(α)
infatti posto
h(x) = xα
h0 (x) = αxα−1
−x
g(x) = −e
g 0 (x) = e−x
si ha
Γ(α + 1) =
R +∞
0
xα e−x dx =
= [h(x)g(x)]+∞
−
0
R +∞
+α
= [−xα e−x ]+∞
|
{z 0 }
0
R +∞
0
R +∞
0
h(x)g 0 (x)dx =
h0 (x)g(x)dx =
xα−1 e−x dx = αΓ(α).
=0
In particolare
Γ(1) =
R +∞
0
x1−1 e−x dx =
R +∞
0
e−x dx = 1
e quindi se considero solo i valori interi di α si ha
Γ(n + 1) = nΓ(n) = . . . = n!Γ(1) = n! n ∈ N
La funzione Γ applicata al numero intero n restituisce il fattoriale di n − 1.
7.10. Distribuzione Beta.
Dati due parametri r, s entrambi positivi, un n.a. continuo X con densità di
probabilità data da
(
Γ(r+s) r−1
x (1 − x)s−1 , se x ∈ (0, 1),
Γ(r)Γ(s)
(84)
Br,s (x) =
0,
altrimenti
si dice che ha distribuzione beta, di parametri r ed s, e si indica nel seguente
modo: X ∼ Br,s (x).
La distribuzione Br,s (x) con r, s = 1 diviene la distribuzione U(0, 1), infatti
per x ∈ (0, 1)
Γ(r+s) r−1
x (1 − x)s−1 =
Γ(r)Γ(s)
Γ(2)
1!
= Γ(1)Γ(1)
x0 (1 − x)0 = 0!0!
= 1.
Alcuni grafici della funzione densità al variare dei parametri r, s sono illustrati nelle Figure 7.6, 7.8, 7.10.
Si può dimostrare che
R1
0
G.Sanfilippo
xr−1 (1 − x)s−1 dx =
Γ(r)Γ(s)
Γ(r+s)
,
7.10 Distribuzione Beta.
118
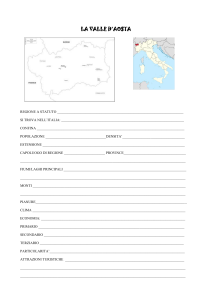
F IGURA 7.5. Beta r=1, s=1
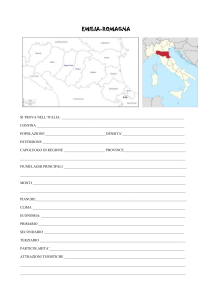
F IGURA 7.6. Beta r=1.5, s=0.5
F IGURA 7.7. Densità Beta, r=0.5, s=0.5
pertanto
R +∞
R 1 Γ(r+s) r−1
B (x)dx = 0 Γ(r)Γ(s)
x (1 − x)s−1 dx =
= 1.
r,s
−∞
Γ(r)Γ(s) Γ(r+s)
= Γ(r+s) Γ(r)Γ(s)
La previsione di X è data da
R +∞
R1
P(X) = −∞ xBr,s (x)dx = 0
=
Γ(r+s) Γ(r+1)Γ(s)
Γ(r)Γ(s) Γ(r+s+1)
G.Sanfilippo
=
Γ(r+s) r
x (1
Γ(r)Γ(s)
Γ(r+s) (r)Γ(r)Γ(s)
Γ(r)Γ(s) (r+s)Γ(r+s)
=
− x)s−1 dx =
r
r+s
.
7.11 Distribuzione Gamma.
119
F IGURA 7.8. Densità Beta, s=1
F IGURA 7.9. Densità Beta, r=3, s=1.5
F IGURA 7.10. Densità Beta, r=3.5, s=3.5
In modo analogo si prova che
R +∞
P(X 2 ) = −∞ x2 Br,s (x)dx =
=
r(r+1)
(r+s)(r+s+1)
Γ(r+s)
Γ(r)Γ(s)
R1
0
xr+1 (1 − x)s−1 dx =
,
e quindi
V ar(X) = P(X 2 ) − [P(X)]2 =
G.Sanfilippo
rs
(r+s)2 (r+s+1)
.
7.11 Distribuzione Gamma.
120
7.11. Distribuzione Gamma.
Data la funzione Γ(·)
Z
Γ(α) =
(85)
+∞
xα−1 e−x dx, ∀α ∈ R+
0
e posto x = λy, con λ > 0, si ha
Z +∞
λα y α−1 e−λy dy, ∀α ∈ R+
(86)
Γ(α) =
0
Un numero aleatorio X ha distribuzione gamma di parametri α > 0, λ > 0
e si indica con X ∼ Gα,λ se la sua densità è
λα α−1 −λx
Gα,λ (x) =
x e , x > 0.
Γ(α)
A volte al posto di λ come parametro si utilizza Θ = λ1 . In tal caso si ha
x
xα−1 e− θ
Gα,θ (x) = α
, x > 0.
λ Γ(α)
Il parametro Θ dicesi parametro di scala e il parametro α dicesi parametro
di forma. E’ facile verificare che
Z +∞ α
λ
Γ(α)
xα−1 e−λx dx =
= 1.
Γ(α)
Γ(α)
0
Se X ∼ Gk,λ , con k ∈ N, la distribuzione Gamma dicesi anche distribuzione di Erlang.
E SERCIZIO 7.2. Verificare che la funzione di ripartizione di un numero
aleatorio X ∼ Gk,λ , con k ∈ N, è data da
F (x) = P (X ≤ x) = 1−P (X > x) = 1−
k−1
X
(λx)i
i=0
i!
e−λx = 1−P (Y ≤ k−1),
con Y numero aleatorio con distribuzione di Poisson di parametro λx, cioè
Y ∼ P(λx).
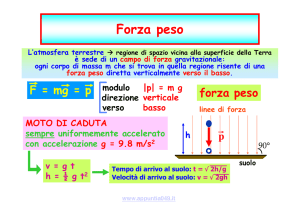
Se α = 1 si ottiene Gα,λ = Exp(λ). Pertanto un numero aleatorio X
con distribuzione esponenziale di parametro λ è un numero aleatorio con
distribuzione gamma di parametro α = 1 e λ. Il grafico, per λ = 1, è
rappresentato in Figura 9.7. Nelle Figure 9.8, 9.9, 9.10 sono rappresentate,
rispettivamente, le distribuzioni G2,1 , G4,1 , G8,1 .
E SERCIZIO 7.3. Verificare che per un numero aleatorio X ∼ Gα,λ si ha
α
α
2
= 2.
P(X) = , σX
λ
λ
Infatti
Z
P(X) =
0
G.Sanfilippo
+∞
λα α−1 −λx
1
x
x e dx =
Γ(α)
λΓ(α)
Z
0
+∞
λα+1 xα e−λx dx =
7.11 Distribuzione Gamma.
121
1
0.8
0.6
0.4
0.2
0
2
4
x
6
8
10
F IGURA 7.11. Exp(λ), λ = 1
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
2
4
x
6
8
10
F IGURA 7.12. Gα,λ , α = 2, λ = 1
=
Γ(α + 1)
α
= .
λΓ(α)
λ
Inoltre, poichè
2
Z
P(X ) =
0
G.Sanfilippo
+∞
x2
λα α−1 −λx
Γ(α + 2)
α(α + 1)
x e dx = 2
=
Γ(α)
λ Γ(α)
λ2
7.11 Distribuzione Gamma.
122
0.2
0.15
0.1
0.05
0
2
4
x
6
8
10
F IGURA 7.13. Gα,λ , α = 4, λ = 1
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
2
4
6
8
10
x
12
14
16
18
20
F IGURA 7.14. Gα,λ , α = 8, λ = 1
si ha
2
σX
= P(X 2 ) − [P(X)]2 =
G.Sanfilippo
α(α + 1) α2
α
− 2 = 2.
2
λ
λ
λ
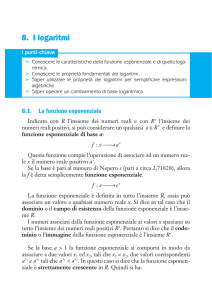
7.11 Distribuzione Gamma.
F IGURA 7.15. Densità di probabilità di alcune distribuzioni
di Erlang. Fonte Wikipedia
G.Sanfilippo
123
CAPITOLO 8
Affidabilità
124
8.1 Affidabilità
125
8.1. Affidabilità
Ricordiamo che, dato un n. a. X non negativo con distribuzione esponenziale di parametro λ, vale la seguente proprietà di assenza di memoria
P (X > x + y | X > y) = P (X > x) = · · · =
(87)
= e−λx , ∀ x > 0 , y > 0 .
Dalla (87), considerando l’evento contrario, si ottiene
P (X ≤ x + y | X > y) = P (X ≤ x) =
(88)
= 1 − e−λx , ∀ x > 0 , y > 0 ,
e, più in generale,
P (x + y < X ≤ x + y + ∆x | X > y) =
= P (x < X ≤ x + ∆x) = F (x + ∆x) − F (x) =
(89)
= (1 − e−λ(x+∆x) ) − (1 − e−λx ) =
= e−λx (1 − e−λ∆x ) , ∀ x > 0 , y > 0 .
Se la distribuzione di X non è esponenziale le formule precedenti non
valgono e, per fissati valori x, y, potrà risultare
P (X > x + y | X > y) < P (X > x) ,
(90)
oppure
P (X > x + y | X > y) > P (X > x) ,
(91)
o in casi particolari
P (X > x + y | X > y) = P (X > x) .
(92)
Se X rappresenta il tempo aleatorio fino al guasto di una data apparecchiatura, il fatto che vale la (87) corrisponde all’assenza di usura, mentre la (90)
e la (91) corrispondono rispettivamente al caso di usura positiva (invecchiamento dell’apparecchiatura) e di usura negativa (ringiovanimento dell’apparecchiatura).
Indicando con f (x) la densità di probabilità e con S(x) la funzione di
sopravvivenza, se consideriamo l’evento condizionato (x < X ≤ x +
∆x | X > x), con ∆x abbastanza piccolo , si ha (sotto opportune condizioni)
P (x < X ≤ x + ∆x | X > x) =
(93)
=
G.Sanfilippo
R x+∆x
x
f (x)dx
S(x)
'
f (x)∆x
S(x)
P (x<X≤x+∆x)
P (X>x)
= h(x)∆x .
=
8.1 Affidabilità
126
f (x)
La funzione non negativa h(x) = S(x)
si chiama funzione di rischio (o
intensità, o tasso di avaria) di X e, come abbiamo visto, permette di approssimare P (x < X ≤ x + ∆x | X > x) con h(x)∆x.
Assegnare f (x) è equivalente ad assegnare h(x). Infatti, data la densità
f (x), si ha
Z +∞
f (x)
f (t)dt ,
h(x) = R +∞
·
S(x) =
f (t)dt
x
x
Viceversa, data la funzione di rischio h(x), si ha
f (x)
S 0 (x)
h(x) =
=−
,
S(x)
S(x)
e quindi
S 0 (x)
= DlnS(x) = −h(x) .
S(x)
Allora
Z x
lnS(x) = −
h(t)dt + c ,
0
dove c è una costante arbitraria. Ricordando che per un n.a. non negativo è
S(0) = 1, si ha lnS(0) = c = 0 e quindi
S(x) = e−
(94)
Rx
0
h(t)dt
,
da cui segue
(95)
f (x) = h(x)S(x) = h(x)e−
Rx
0
h(t)dt
.
La funzione di rischio, oltre ad essere non negativa, soddisfa la seguente
proprietà
Z +∞
h(x)dx = +∞ .
0
Infatti tale condizione segue dalla (94), osservando che
Z +∞
lim S(x) = lim
f (t)dt = 0 .
x→+∞
x→+∞
x
Osserviamo anche che, come appare dalla (93), se la funzione di rischio
h(x) è crescente l’apparecchiatura subisce un’usura positiva (invecchiamento). Infatti, si ha
P (x < X ≤ x + ∆x | X > x) =
= · · · = 1 − e−
R x+∆x
x
h(t)dt
S(x)−S(x+∆x)
S(x)
,
da cui, se h(x) è crescente, per x1 < x2 si ha
Z x1 +∆x
Z x2 +∆x
h(t)dt <
h(t)dt .
x1
Allora
−
1−e
G.Sanfilippo
x2
Rx
1 +∆x
x1
h(t)dt
<1−e
−
Rx
2 +∆x
x2
h(t)dt
,
=
8.1 Affidabilità
127
e quindi
P (x1 < X ≤ x1 + ∆x | X > x1 ) <
< P (x2 < X ≤ x2 + ∆x | X > x2 ) .
Con lo stesso ragionamento, si dimostra che se h(x) è decrescente c’è usura
negativa (ringiovanimento).
Infine, il caso in cui h(x) è costante (assenza di usura) è caratteristico della
distribuzione esponenziale. Infatti, se
f (x) = λe−λx , ∀ x ≥ 0 ,
allora
f (x)
λe−λx
= −λx = λ .
S(x)
e
Viceversa, se h(x) = cost = λ > 0, allora
h(x) =
f (x) = h(x)S(x) = λe−
Rx
0
λdt
= λe−λx , ∀ x ≥ 0 .
Alcuni modelli particolari di funzioni di rischio sono:
(a) h(x) = α + βx;
(b) h(x) = cxβ .
Nel caso (a) (modello lineare), essendo
Z +∞
h(x) ≥ 0 ,
h(x)dx = +∞ ,
0
segue che le costanti α e β devono essere non negative ed almeno una
positiva, cioè devono soddisfare le condizioni
α ≥ 0,
β ≥ 0,
α + β > 0.
Pertanto, nel caso β > 0, h(x) è crescente, mentre nel caso β = 0, h(x)
è costante e la corrispondente distribuzione è esponenziale di parametro α.
Con il modello lineare, quindi, non si può rappresentare la situazione di
usura negativa.
Nel caso (b), dalle proprietà di h(x) segue intanto che dev’essere c > 0.
Inoltre, non può essere β ≤ −1, altrimenti, per ogni fissato x > 0, si
avrebbe
Z x
ctβ dt = +∞ ,
0
e quindi risulterebbe
S(x) = e−
Rx
0
ctβ dt
= 0, ∀x > 0.
Pertanto, dev’essere β > −1 e possiamo distinguere tre casi:
(i) − 1 < β < 0;
(ii) β > 0;
(iii) β = 0.
Nel primo caso h(x) è decrescente e quindi siamo in presenza di usura negativa; nel secondo caso h(x) è crescente (usura positiva); nel terzo caso
h(x) è costante (assenza di usura) e la distribuzione è esponenziale di parametro c.
G.Sanfilippo
8.1 Affidabilità
128
La distribuzione di probabilità corrispondente alla funzione di rischio h(x) =
cxβ è detta distribuzione di Weibull ed ha la seguente densità
f (x) = cxβ e−
G.Sanfilippo
Rx
0
ctβ dt
c
= cxβ e− β+1 x
β+1
.
")