LEZIONE N. 3
TRASFORMAZIONI DI GALILEO E PRINCIPIO DI
RELATIVITA’ GALILEIANA
Il termine “trasformazioni di Galileo” fu introdotto nell’uso dal fisico Philipp Frank nel 1909.
La posizione assunta da Galilei nel Dialogo fu l’esito di anni di ricerche locali, ovvero di ricerche che, anziché tentare
di risolvere l’impossibile problema globale del motus, affrontarono problemi quanto mai ristretti o parziali: il pendolo,
i piani inclinati, il moto dei proiettili.
Galilei dovette infatti dichiarare che lo spazio è omogeneo e isotropo, e che, di conseguenza, non sono realizzabili
esperimenti di meccanica grazie ai quali distinguere uno stato di quiete da uno stato di moto rettilineo e uniforme,
anche se tutta la conoscenza allora disponibile sui moti doveva negare proprio queste cose e riusciva a negarle proprio
con l’appello all’esperienza. Stiamo attenti: la base empirica era contraria allo spazio galileiano, e Galilei, pur avendo
capito moltissime cose grazie all’esperienza, dovette alla fine sostenere che la verità sul moto dipendeva
dall’impossibilità di fare esperimenti atti a distinguere la quiete dal moto. Anzi la base empirica è contraria ancora
oggi allo spazio galileiano, anche se ci facciamo caso solo quando ci rendiamo conto dell’impressionante fatto per cui
la fisica di senso comune è, per così dire, aristotelica.
Sotto questo profilo è sbagliato dichiarare che gli ostacoli principali che Galilei dovette affrontare riguardavano
questa o quella legge galileiana sul moto. Ed è sbagliato perché le leggi galileiane sul moto, così come appaiono nei
Discorsi e dimostrazioni, si riducono a quelle sul moto rettilineo e naturalmente accelerato, e a qualche teorema sulle
traiettorie dei proiettili.
La spettacolare grandezza della fisica galileiana è collocata, invece, nel principio di relatività, il quale garantisce
l’invarianza delle leggi del movimento sotto condizioni precise circa la natura stessa dello spazio.
Galilei introduce, nelle descrizioni spaziali, la fisica: la introduce in forme tali da cambiare la nozione di spazio
usualmente inferibile dalle percezioni intersoggettive degli osservatori.
Questo versante della rivoluzione galileiana è manifesto nel famosissimo passo del Dialogo dove si discute il problema
della nave.
Questo brano è problematico in modo profondo perché getta luce sulla necessità di abbandonare lo spazio come mero
ente di percezione e sulla conseguente necessità di reinterpretare le osservazioni sul moto a un principio
astrattissimo.
L’argomento di Galilei dice che si possono realizzare alcune esperienze al fine di concludere che tutte le esperienze
possibili nulla dicono sulla distinzione fra stato di quiete e stato di moto non accelerato. Questo argomento dichiara
che le leggi del moto sono invarianti per osservatori in quiete o in moto non accelerato. E la cosa più incredibile,
allora, è che l'argomento di Galilei nega che esistano osservatori nel senso normale del termine: non esistono infatti
osservatori che, con esperimenti di meccanica, possano capire se stanno in un sistema di riferimento o in un altro.
L’argomento della nave elimina di fatto il ruolo degli osservatori, svuota del suo tradizionale contenuto una classe
enorme di esperienze e invita i parlanti a riclassificare tutta la base empirica in nome dell’invarianza delle leggi di
natura: il che giustifica l’atteggiamento di chi oggi battezza il punto di vista galileiano con l’espressione “principio di
relatività di Galilei”.
L’invarianza delle leggi della meccanica galileiana comporta, di necessità, che lo spazio non sia quello della
percezione di senso comune, ma sia invece una struttura ovunque isotropa e omogenea. E, sulla base dei testi
galileiani, dobbiamo concludere che Galilei capì di aver scoperto questa struttura controintuitiva e si rese conto di
doverla comunicare ad altri facendo leva su esempi intuitivi e facili come quelli concernenti il volo delle mosche in
ogni direzione.
L’invarianza galileiana, però comporta anche che il tempo sia, in modo assai poco intuitivo, uniforme.
Se pretendiamo che nello spazio debba valere l’equivalenza circa le posizioni e le direzioni, dobbiamo anche
pretendere che siano tra loro equivalenti gli istanti in cui un oggetto è in certe posizioni.
Lo spazio galileiano e il tempo galileiano, pur essendo ormai problematici rispetto allo spazio e al tempo consegnatici
dal linguaggio quotidiano, avevano in comune con questi ultimi la caratteristica di essere raffigurabili come cose
esterne ai recettori sensoriali: cose che stanno nel mondo dove si muovono gli oggetti corporei.
La struttura di queste cose che stavano nel mondo era pur sempre enigmatica. Essa doveva ad esempio costituire lo
scenario dove erano disposte le qualità primarie degli oggetti corporei – il numero, la figura e il moto – che, secondo
Galilei e altri studiosi, erano l’obiettivo centrale da cogliere.
1
DALLE ORIGINI ALLA RELATIVITA’ GALILEIANA
Un concetto di <<relatività>> è praticamente esistito fin da quando si è cominciato a distinguere fra destra e
sinistra, avanti e dietro, alto e basso, ed infine prima e dopo. Infatti, e ciò è immediato, tali concetti implicano un ben
determinato riferimento, altrimenti non hanno un significato univoco. Perché però i suddetti concetti possano essere
quantificati, occorre che le varie grandezze in gioco possano essere misurate. In definitiva, gran parte della storia
della relatività è parallela alla storia della definizione delle grandezze da misurare e della loro effettiva misura con
una precisione sempre maggiore. Non si può quindi fare a meno di citare i primi successi nelle misure e calcoli di
tempo e di spazio, ossia per quest’ultimo, di lunghezze, aree e volumi.
Limitandoci alle civiltà del vicino Oriente, possiamo dire che i primi risultati riguardanti la misura di
lunghezze, aree e volumi risalgono (circa 1500 a.C.) alla matematica babilonese ed egiziana. L’acquisizione
fondamentale dei relativi calcoli (ovviamente necessari, e verificati sufficienti, per il commercio) fu di portare a
riconoscere la tridimensionalità dello spazio e soprattutto l’indipendenza (ovviamente sperimentale) dal luogo e
dall’orientamento: cioè a riconoscere che, ad esempio, il volume di un corpo di data forma non dipende dal luogo e
dall’orientamento (mettiamo, rispetto ai punti cardinali).
Per avere un’idea dei progressi e dei risultati ottenuti già in epoche molto antiche, si può citare un papiro
egiziano del XVII secolo a.C., conservato a Mosca, in cui è riportato tra l’altro il calcolo del volume di una piramide
tronca e quello dell’area di una mezza sfera. Tali risultati, lungi dall’essere banali, sono invece assolutamente
fondamentali, in quanto hanno permesso la scoperta della geometria del tipo che oggi chiamiamo euclidea. (Se si vuole
un semplice esempio di possibilità di una geometria non invariante per traslazione e rotazione, basta pensare alla
geometria sopra un ellissoide a tre assi di lunghezza diversa.)
Parallelamente allo studio delle proprietà geometriche dei corpi (oggi diremo dello spazio), si deve avere lo
studio della variabile tempo: premessa indispensabile per un approccio alla soluzione di problemi dinamici. I primi
calendari risalgono ancora ai babilonesi e agli egiziani: ne sono state studiate molte versioni, e l’inizio di ricerche in
proposito può essere fissato intorno al 3000-2500 a.C. L’uso scientifico del calendario, ed una specie di verifica
sperimentale della sua utilità nello studio dei fenomeni naturali, si ebbe quando esso cominciò ad essere usato per la
previsione di fenomeni celesti notevoli, che per la <<lentezza>> dell’orologio usato, non potevano essere altro che le
eclissi.
La più antica previsione d’eclissi di Luna di cui sia rimasta traccia risale ai babilonesi, all’epoca dei
Sargonidi (722-607 a.C.) Quanto alle eclissi di Sole, la prima previsione di cui si abbia notizia è attribuita a Talete di
Mileto che avrebbe indicato la data del 31 luglio 597 a.C., oppure, secondo altri, del 28 maggio 585 a.C.; tuttavia la
critica storica tende a considerare dubbio che Talete abbia veramente potuto fare la previsione che gli si attribuisce.
La suola dei Pitagorici (fondata da Pitagora di Samo, che visse dal 582 al 500 a.C. circa) cercò addirittura di
formulare una teoria alla struttura dello spazio e del tempo, affermando che questi sono composti di <<monadi>>. Ne
risulta subito che due segmenti qualsiasi, essendo entrambi composti di un numero intero di monadi, devono risultare
commensurabili (oggi potremmo chiamare tale teoria la quantizzazione delle lunghezze e quindi della geometria). La
scoperta degl’incommensurabili da parte della stessa scuola fece crollare l’intera teoria, ed obbligò ad accettare l’idea
del continuo, semplicemente come opposto a discreto, sia per lo spazio sia per il tempo. Incidentalmente, osserviamo
che tale questione è ancora tutt’altro che sistemata al giorno d’oggi: invero vi sono stati molti tentativi d’introdurre
una lunghezza fondamentale, cioè di <<quantizzare>> lo spazio e il tempo, ma con risultati finora del tutto incerti
Ulteriori e ben importanti tentativi d’organizzazione della conoscenza furono poi fatti, com’è universalmente
risaputo, da Aristotele (384-322 a.C.). Per quanto riguarda lo spazio, egli assume che esso sia continuo (proprio per il
fallimento delle <<monadi>> dei Pitagorici) e tridimensionale. Quanto alla struttura del tempo, egli la discute in gran
dettaglio, e – a dirla in breve – si serve continuamente del <<parallelo>> con la retta. Oggi diremmo che la topologia
dello spazio è in Aristotele del tipo
3
1
E (euclidea tridimensionale), quella del tempo del tipo E (euclidea
4
monodimensionale), e quella complessiva dello spazio-tempo è data da E , ossia è il semplice prodotto topologico
delle due. Ove si volesse indurre tale topologia mediante una metrica, si potrebbe ad esempio scegliere subito, per
esprimere l’elemento di lunghezza d’arco, la relazione
ds 2 dx 2 dy 2 dz 2 dt 2
(Si noti comunque che per avere una chiara impostazione e definizione delle proprietà geometriche dello
spazio, occorrerà attendere Euclide (330-260 a.C.) e la sua scuola. Orbene, nei suoi famosi <<Postulati>> nulla
appare sull’orientamento del sistema di riferimento: siamo quindi in piena relatività euclidea, la quale afferma che le
proprietà geometriche delle figure sono invarianti per traslazione e rotazione.)
In Aristotele si trova la parola relatività (Fisica IV ( ), 1, 208b, 15) in relazione ai concetti di alto-basso,
avanti-dietro, sinistra-destra. Questi concetti per il grande filosofo greco sono relativi a <<noi>>: <<essi, infatti, –
dice – non sono sempre la stessa cosa>>, e questo è un vero e proprio principio di relatività nel senso moderno; ma
riguardo alla Natura, egli fa poi distinzioni assolute, perché afferma che <<l’alto non è qualsiasi cosa, ma là dove si
portano il fuoco ed il leggero>>. Secondo Aristotele esiste, quindi un riferimento assoluto, ed il principio di relatività
sopra ricordato non è accettato per la Natura.
2
Non solo: per lui lo spazio deve essere sempre <<pieno>>; il vuoto viene rigettato perché (Fisica IV
( ), 8, 215a, 20) in tal caso <<un corpo o dovrà essere in quiete ovvero necessariamente sarà spostato all’infinito>>.
Siffatta proprietà, che non è altro che il principio d’inerzia, viene rigettata come assurda e assunta come <<prova>>
dell’impossibilità del vuoto. Lo stato di moto è in Aristotele essenzialmente distinto dallo stato di quiete e non può
essere mantenuto a lungo senza cause esterne: ad esempio un sasso lanciato in aria continua il suo moto per un cero
tempo perché l’aria è spostata, circola all’indietro e quindi spinge il corpo in avanti.
Tali concetti, soprattutto per l’autorità di Aristotele, restarono a lungo in tutta la fisica posteriore, seppure
non senza provocare talvolta dubbi e discussioni.
Ma è solo con il risveglio prerinascimentale che i dubbi assunsero carattere di aperta confutazione. As
esempio Jean Buridan di Béthune (1300-1358 circa), rettore della Sorbona, osservò, osando confutare Aristotele, che
<<una barca spinta rapidamente contro la corrente di un fiume, non si arresta mai di colpo, e continua a muoversi per
un bel tratto anche quando si cessa di spingerla. Eppure il barcaiolo vi sta sopra, in piedi, non si sente affatto spinto
posteriormente dall’aria, anzi sente che l’aria fa resistenza al moto del suo corpo>>.
Esempi di genere simile si moltiplicano in seguito, ma, per cominciare ad incrinare seriamente la teoria
aristotelica del riferimento assoluto, occorrerà attendere Copernico(1473-1543), e l’introduzione del moto della Terra
nel suo sistema (questo concetto riprende ed estende un’antica idea di Aristarco di Samo del III secolo a.C.). Una
convincente dimostrazione dei moderni principi della meccanica si ebbe solo con Galilei (1564-1642), mediante un
continuo ricorso all’esperienza.
Si può dire che con Galilei inizia la vera fisica moderna, come scienza sperimentale. La preminenza della
ricerca sperimentale è uno dei punti fondamentali a cui si appoggia tutto il lavoro del Galilei. Di origine sperimentale
sono infatti le conclusioni riguardanti il principio d’inerzia, come ritroviamo in: <<...è lecito aspettarsi che, qualunque
grado di velocità si trovi in un mobile, gli sia per sua natura indelebilmente impresso, purché siano tolte le cause
esterne di accelerazione o di ritardamento: il che accade soltanto nel piano orizzontale: infatti nei piani declivi è di già
presente una causa di accelerazione, mentre in quelli acclivi di ritardamento: da ciò segue parimenti che il moto sul
piano orizzontale è anche eterno; infatti, se è equabile, non scema o diminuisce, né tanto meno cessa>> (*)1
Da ciò Galilei fa presto ad arrivare al principio di relatività galileiana, cioè ad affermare che in un
riferimento in moto rettilineo uniforme rispetto ad un altro in cui si sia verificato il principio d’inerzia nulla può dare
una percezione del moto. Scrive infatti: <<…fate muover la nave con quanta si voglia velocità; ché (pur che il moto sia
uniforme e non fluttuante in qua e in là) voi non riconoscerete una minima mutazione in tutti i nominati effetti, né da
alcuno di quelli potrete comprender se la nave cammina o pure sta ferma: voi saltando passerete nel tavolato i
medesimi spazi che prima, né, perché la nave si muova velocissimamente, farete maggior salti verso la poppa che verso
la prua…>>.
Abbiamo quindi con Galilei un principio di relatività che afferma l’inesistenza di un riferimento assoluto (che
era invece affermato esistere da Aristotele) per i fenomeni meccanici meccanici, e l’impossibilità di rivelare un moto
rettilineo uniforme.
Notiamo esplicitamente che nulla viene affermato da Galilei a proposito del tempo: questo mantiene ancora lo
stesso significato che in Aristotele e non cambia al passare da un riferimento inerziale ad un altro, pure inerziale, in
moto uniforme rispetto al primo. I principi galileiani si ritrovano riformulati in modo rigoroso, nell’opera di Newton 2,
e sono ancora oggi insegnati nei corsi istituzionali di fisica.
1
Conviene fare qualche precisazione su cosa si debba oggi intendere per moto <<equabile>>. Nella geometria euclidea
è ben noto come si possano attribuire delle coordinate <<euclidee>>, ad esempio come si possa fabbricare un righello
con tacche a distanze uguali, ed infine come si possa verificare sperimentalmente la validità della geometria euclidea
con sole misure di lunghezza. Analogamente però si deve procedere per il tempo, secondo lo schema seguente:
si assume (principio d’inerzia) che un corpo non soggetto a forze esterne si muova di moto rettilineo,
si definisce il tempo in modo tale che a spazi percorsi eguali corrispondano intervalli di tempo eguali,
si verifica sperimentalmente che con vari corpi di diverse velocità e direzioni il tempo, come sopra definito
<<scorre con la stessa velocità>>.
La consueta asserzione che per il principio d’inerzia un corpo libero è in quiete o in moto rettilineo uniforme è da
ritenersi totalmente superata. L’asserzione invero si riferisce al termine <<rettilineo>>; il termine <<uniforme>> è
infatti la definizione del tempo. A questo proposito si può notare che Aristotele aveva bensì i mezzi per verificare la
geometria, ma per il tempo non poteva fare altro che limitarsi ad una definizione soggettiva.
2
Is. Newton: Philosophiae Naturalis Principia Mathematica (jussu Societatis regiae, London, 1687)
3
Con linguaggio moderno potremmo enunciare nel seguente modo il principio di relatività galileiana:
a) il tempo è assoluto (aristotelico), cioè l’unico <<grado di libertà>> è l’origine dei tempi (nonché –
ovviamente – la velocità degli orologi), ma il tempo risulta poi lo stesso in ogni riferimento, inerziale o
no;
b) non esiste per lo spazio un sistema di riferimento assoluto;
c) le leggi della meccanica sono le stesse in qualunque riferimento inerziale, cioè sono invarianti per
trasformazioni di Galilei.
Questo enunciato esprime un principio di relatività perché le coordinate e la velocità di un mobile assumono
significato relativo, cioè indipendente dal sistema di riferimento (inerziale) usato.
La relatività galileiana, per riferimenti inerziali non in moto l’uno rispetto all’altro (ma in generale con
origine ed orientamento diverso) si riduce alla relatività euclidea, secondo la quale le proprietà dei corpi
risultano invarianti per trasformazioni di Euclide, cioè per traslazioni e rotazioni.
4
IDEA FONDAMENTALE:
La trasformazione di coordinate appartenenti allo stesso sistema di riferimento inerziale è una questione puramente
matematica, mentre la trasformazione di coordinate appartenenti a sistemi di riferimento inerziali differenti è un
problema che cade nel campo della fisica. Questo problema può essere risolto solo per mezzo di esperimenti.
Trasformazioni geometriche di coordinate
Esse sono determinate dalla definizione dei sistemi di coordinate come risultato di costruzioni geometriche. Queste
trasformazioni non includono il tempo. Queste trasformazioni non includono un cambiamento dei valori delle quantità
fisiche.
Trasformazioni fisiche di coordinate
Corpi diversi per i quali esistono differenti sistemi di riferimento possono essere in moto relativo l’uno con l’altro.
Ciascun riferimento ha il suo proprio sistema di coordinate e il tempo è misurato in differenti punti del sistema usando
orologi che sono a riposo e sono sincronizzati.
Cerchiamo un legame tra le coordinate e il tempo in vari sistemi di riferimento se essi sono in moto relativo. Questo
problema non può essere risolto con considerazioni puramente geometriche. E’ essenzialmente un problema fisico che
è trasformato in problema geometrico solamente quando la velocità relativa dei vari sistemi di riferimento è zero
cosicché non ci sono differenze fisiche tra i vari riferimenti ed essi non possono essere trattati come un sistema singolo.
Sistemi di riferimento inerziali e principio di relatività
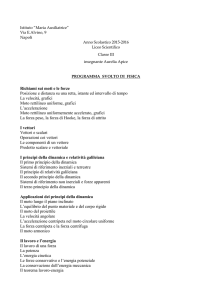
Il moto più semplice di un corpo rigido è una traslazione uniforme su una linea retta. In corrispondenza, il moto
relativo più semplice di un sistema di riferimento è la traslazione uniforme su una linea retta. Introduciamo un sistema
di coordinate cartesiano (x ,y ,z) nel sistema detto in quiete K e nel sistema in moto (x’, y, ’z’). Assumiamo che la
stessa lettera ,solo con apice, sia usata per individuare la stessa quantità nel sistema considerato in moto.
Y
Y
K
v
K’
X
Z
X’
Z’
Da una moltitudine di esperimenti segue che in tutti i sistemi di riferimento che si muovono uniformemente su una
retta rispetto alle stelle fisse e quindi relativamente uno all’altro, tutti i fenomeni meccanici si svolgono
identicamente.
Si assume che i campi gravitazionali siano trascurabilmente piccoli. Tali riferimenti sono chiamati inerziali
perché la legge di inerzia di Newton è verificata in essi, cioè un corpo lontano da altri corpi si muove di moto
rettilineo uniforme relativamente al sistema di riferimento.
Il principio di relatività stabilisce che tutte le leggi fisiche sono identiche in tutti i sistemi di riferimento
inerziali. La natura inerziale dei sistemi di riferimento e la validità del principio di relatività in essi sono dovuri alle
proprietà dello spazio e del tempo, Esistono infiniti sistemi di riferimento inerziali. Tutti questi sistemi si muovono di
moto rettilineo uniforme l’uno rispetto all’altro.
Il principio di relatività è un postulato, cioè un’assunzione fondamentale che necessita di una verifica
sperimentale. Questo è dovuto a due ragioni.
Prima di tutto, nel range dei fenomeni fisici investigati, un’affermazione può essere verificata
sperimentalmente soltanto con l’accuratezza permessa dalle tecniche di misurazione contemporanee. Un principio,
tuttavia, è assoluto in natura, vale a dire che qualunque sia l’accuratezza dell’esperimento, i risultati saranno sempre
in accordo con il principio.
In secondo luogo, ci sono alcuni fenomeni fisici che non sono ancora stati scoperti. Il principio che tutti i
fenomeni che saranno scoperti in futuro obbediranno al principio di relatività va oltre i confini della verifica
sperimentale. Qui il principio di relatività è un postulato e tale rimarrà sempre. Ma tutto ciò non lo sminuisce per
niente. Tutti i concetti scientifici, leggi e teorie sono state portate avanti per una certa classe di fenomeni fisici e sono
valide solo entro certi limiti. Superare i limiti d’applicabilità non trasforma i concetti scientifici, leggi e teorie in
oggetti privi di senso. Il progresso nella scienza significa semplicemente un’estensione del range d’applicabilità delle
teorie esistenti.
5
TRASFORMAZIONI DI GALILEI
Il passaggio da un sistema di riferimento ad un altro in moto rispetto al primo, fu realizzato molto prima dell’avvento
della teoria della relatività. Il primo che usò questa tecnica nel problema dell’urto tra sfere fu Huygens.
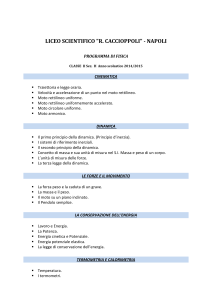
In un sistema di riferimento arbitrario K un evento è descritto dai quattro numeri x, y, z, t, da tre coordinate del
punto,in cui ha luogo l’evento, e dal momento di tempo in cui è avvenuto. Vogliamo sapere come saranno i quattro
numeri x’, y’, z’, t’ in un altro sistema di riferimento K’ in moto rispetto a K.
K
z’ K’ M
r' V
Y
y’
r
O’
x’
R
x
O
z
I due sistemi di riferimento K e K’ con gli assi x, y, z e x’, y’, z’ diretti arbitrariamente. Il sistema K’ si muove
V . Il raggio vettore del punto M, uguale al vettore r nel sistema K, nel sistema K’ è
uguale ad r ' . Secondo la regola di somma vettoriale r r ' R , dove R è il raggio vettore dell’origine O’.
Questa relazione è valida per ogni istante di tempo ed R varia secondo la legge R Vt R0 , dove R0 è il raggio
relativamente a K con velocità
vettore che determina l’origine O’ al tempo t = 0. Tenendo presente che all’istante t = 0 entrambe le origini
R Vt e si ottiene la legge di trasformazione in forma vettoriale
r ' r Vt
dove le componenti del vettore V sono definite nel sistema K.
coincidono,
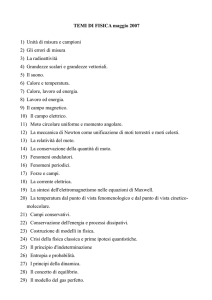
A questo punto si può sfruttare l’isotropia dello spazio e ruotare ognuno dei due sistemi K e K’ intorno alle rispettive
origini. E’ conveniente farlo nel seguente modo. Ruotando i sistemi di riferimento, orientiamo gli assi x e x’ lungo la
direzione della velocità relativa dei sistemi K e K’. Poi ruotando i sistemi lungo gli assi comuni x ed x’, orientiamo gli
assi y , y’ e z, z’ parallelamente gli uni agli altri. In tal modo, non perdendo di generalità fisica, siamo giunti alle
posizioni reciproche dei sistemi di coordinate mostrati nella seconda figura
K
K’
y
y’
M
V
r
r'
O
R
y
O’
Vt
z
x, x’
x’ = x – Vt
x
z
z’
6
In questo caso la velocità V ha componenti (V,0,0).
In fisica classica le coordinate di un <<evento>> si trasformano nel passaggio dal riferimento K a K’ secondo le
formule delle <<trasformazioni di Galilei>>:
x’ = x - Vt
y’ = y
z’ = z
t’ = t
7