Lezione 3
Lezione 3
Materiale di riferimento
Sommario
1. R. Shankar, E. B. Fernandez, "VLSI and computer
architecture", Academic Press, Inc., 1989, cap. 10 – 21,
pagg. 357 - 460
2. G. Bucci, "Architetture degli elaboratori elettronici",
McGraw-Hill, 2001, cap. 2, pp. 41 –76.
3. P. Lapsley, J. Bier, A. Shoham, E.A. Lee, "DSP
Processor Fundamentals - Architectures and Features",
IEEE Press, New York, 1997, cap 4, cap. 7.
4. K. Hintz, D. Tabak, "Microcontrollers - Architecture,
Implementation and Programming", Mc Graw - Hill, 1992,
cap. 2.
5. Berkeley Design Technology, Inc.(BDTi), “DSPs adapt to
new challenges”, reperibile sul sito del corso.
• Caratteristiche generali di una architettura
• Criteri per la classificazione delle
architetture
• Architetture di tipo RISC
• Architetture di tipo CISC
• Architetture per mC e DSP
• Repertorio di istruzioni dei mC e dei DSP
• Modi di indirizzamento
Simone Buso - Microcontrollori e DSP - Lezione 3
1
Simone Buso - Microcontrollori e DSP - Lezione 3
Architettura di un processore
Architettura di un processore
L’architettura di un processore è l’insieme
delle risorse che ne consentono la
programmazione in linguaggio macchina.
Questa viene talvolta indicata come
architettura lato utente (user architecture),
per distinguerla da quella lato sistema
(system architecture), che si riferisce invece
alle risorse richieste dal sistema operativo
(in un processore general purpose). Per noi
solo la prima accezione ha senso, dato che
non ci occuperemo di sistemi operativi per
mC e DSP (sebbene ne esistano).
Indipendentemente dalla sua implementazione,
la finalità di un’architettura è sempre quella
di fornire un supporto efficiente alla
programmazione di un processore. La
definizione di efficienza di una architettura
è però un concetto mutevole nel tempo e
largamente dipendente dalle applicazioni.
Alcune architetture privilegiano il
raggiungimento di elevate prestazioni, altre
la facilità di uso, altre ancora la
programmabilità ad alto livello dei processori.
Simone Buso - Microcontrollori e DSP - Lezione 3
3
Architettura di un processore
4
Classificazione delle architetture
Discutere l’architettura di un processore
significa valutare i seguenti aspetti:
E’ possibile classificare le architetture in
funzione delle caratteristiche dell’insieme di
istruzioni che rendono disponibili al
programmatore.
1. struttura delle istruzioni;
2. modi di indirizzamento dei dati;
In alternativa, è possibile una classificazione
basata sulla filosofia di programmazione
sottintesa dall’architettura stessa (linguaggio
ad alto livello di riferimento).
3. funzioni realizzate dalle istruzioni.
La definizione di una architettura sottintende
sempre una precisa organizzazione hardware.
Organizzazione e architettura sono quindi due
aspetti collegati della progettazione di un
processore.
Simone Buso - Microcontrollori e DSP - Lezione 3
Simone Buso - Microcontrollori e DSP - Lezione 3
2
I due criteri hanno tra loro una considerevole
sovrapposizione.
5
Simone Buso - Microcontrollori e DSP - Lezione 3
6
1
Classificazione delle architetture
Classificazione delle architetture
Le caratteristiche di maggiore interesse per
un insieme di istruzioni sono le seguenti:
La simmetria di un insieme di istruzioni
indica il grado di uniformità dei modi di
indirizzamento tra le diverse istruzioni. Un
insieme di istruzioni si dice simmetrico
quando esistono poche differenze nei modi
di indirizzamento possibili per le varie
istruzioni e quindi quando tutti gli operatori
possono essere applicati a tutti i tipi di
dati. Un set di istruzioni simmetrico implica
quindi una maggiore uniformità nei formati
delle istruzioni.
•
•
•
•
•
•
•
•
Simmetria
Ortogonalità
Compattezza
Flessibilità
Velocità di esecuzione
Costo
Facilità di debugging
Corrispondenza con linguaggi di alto livello
Simone Buso - Microcontrollori e DSP - Lezione 3
7
Classificazione delle architetture
La compattezza delle istruzioni indica la
dimensione del codice macchina che viene
generato nella compilazione di un dato
programma. Alcune architetture favoriscono
la compattezza più di altre (relazione con la
complessità delle istruzioni).
La flessibilità indica invece la facilità con la
quale è possibile modificare l’insieme di
istruzioni, e.g. aggiungendone di nuove in
una successiva versione del processore.
Questo consente di avere un formato di
istruzioni unico e costante, favorendo
l’allineamento delle stesse in memoria e
quindi la velocità del processore.
9
Classificazione delle architetture
Simone Buso - Microcontrollori e DSP - Lezione 3
10
Classificazione delle architetture
La facilità di debugging indica la leggibilità
del codice generato dalla
compilazione/scrittura di un programma.
Questa è importante per la ri-usabilità e
portabilità del codice.
La velocità di esecuzione è chiaramente un
parametro fondamentale per una
architettura. Questa è sempre in relazione
con il costo del processore.
Si parla di costo di una architettura
intendendo il costo del processore che la
pone in atto. Questo a sua volta è funzione
della tecnologia impiegata, della complessità
dei circuiti da realizzare (area di silicio
richiesta) e del volume di produzione atteso.
Simone Buso - Microcontrollori e DSP - Lezione 3
8
Classificazione delle architetture
L’ortogonalità delle istruzioni indica
direttamente la regolarità nella struttura
della parola che rappresenta un’istruzione.
Un set di istruzioni ortogonali presenta
parole della stessa lunghezza, in cui le
dimensioni dei campi associati alle specifiche
funzioni (e.g OPCODE) sono sempre le
stesse.
Simone Buso - Microcontrollori e DSP - Lezione 3
Simone Buso - Microcontrollori e DSP - Lezione 3
E’ anche associata alla maggiore o minore
somiglianza del codice macchina con un
linguaggio di alto livello (corrispondenza).
Alcune architetture rendono disponibili
costrutti tipici dei linguaggi ad alto livello
(cicli for, repeat, etc.).
11
Simone Buso - Microcontrollori e DSP - Lezione 3
12
2
Classificazione delle architetture
Architetture RISC
Sulla base dei parametri appena discussi una
possibile classificazione delle architetture è
la seguente:
Le architetture RISC sono quelle nelle quali
le istruzioni sono meno numerose (poche
decine) e più semplici possibile. La semplicità
è relativa sia al formato che alle
funzionalità delle istruzioni.
Queste hanno tutte le stesse dimensioni (es.
16 bit) e struttura di parola identica.
• Architetture RISC
Basate su registri
Basate su accumulatore/stack (obsolete)
• Architetture di tipo CISC
Von Neumann estese
Orientate ad oggetti/linguaggi
Siccome la decodifica (quasi sempre cablata)
risulta molto semplice, le architetture RISC
permettono spesso l’esecuzione di tutte le
istruzioni in un solo ciclo macchina.
Orientate alla sicurezza (poco diffuse)
Simone Buso - Microcontrollori e DSP - Lezione 3
13
Architetture RISC
Architetture RISC
L’area risparmiata consente la realizzazione
di strutture come banchi di registri o
memorie cache, che accelerano
ulteriormente l’esecuzione dei programmi.
L’organizzazione della CPU è quindi quasi
sempre del tipo a molti registri.
15
Simone Buso - Microcontrollori e DSP - Lezione 3
Architetture CISC
Architetture CISC
Le architetture di tipo CISC sono
caratterizzate da insiemi molto numerosi di
istruzioni (anche centinaia), di struttura
variabile ed, in genere, piuttosto complessa.
La decodifica è in questo caso spesso
microprogrammata, per semplificare la
realizzazione dell’unità di controllo.
Inoltre l’esecuzione delle istruzioni richiede
quasi sempre più cicli macchina.
Architetture CISC sono comuni a molti
processori per uso generico (fino ai primi
anni ‘90), piuttosto rare nei mC e DSP.
Le architetture di tipo CISC sono realizzate
in diverse varianti. La versione più comune
sottende un’organizzazione hardware di tipo
Von Neumann, con eventuali potenziamenti
(si parla di architetture Von Neumann
estese). I principali interventi di
miglioramento consistono nell’introduzione di:
1. memorie cache;
2. coprocessori;
Simone Buso - Microcontrollori e DSP - Lezione 3
14
Le prime realizzazioni di processori RISC
avevano una organizzazione della CPU basata
su un accumulatore e/o un piccolo stack.
Queste avevano istruzioni senza operandi,
quindi di massima semplicità, ma
comportavano un intenso traffico di dati da
e per la memoria.
Le prestazioni delle CPU sono aumentate nel
tempo molto più rapidamente di quelle delle
memorie che sono il “collo di bottiglia” di un
processore. Le organizzazioni a stack sono
quindi state progressivamente abbandonate.
La semplificazione dell’unità di controllo
prodotta dalle architetture RISC comporta
un considerevole risparmio di area di silicio
(riduzione dei costi).
Simone Buso - Microcontrollori e DSP - Lezione 3
Simone Buso - Microcontrollori e DSP - Lezione 3
16
3. blocchi di debugging (funzioni di
“program tracing”).
17
Simone Buso - Microcontrollori e DSP - Lezione 3
18
3
Architetture CISC
Architetture per mC e DSP
Specialmente nel passato (anni ‘80), si sono
avute realizzazioni di processori orientate ai
linguaggi o agli oggetti. I primi miravano ad
interpretare direttamente a livello hardware
le istruzioni di qualche linguaggio ad alto
livello (LISP, FORTH, ..).
I processori orientati agli oggetti tentavano
invece di rendere astratta l’organizzazione a
basso livello del processore, lasciando
all’utente la possibilità di creare oggetti di
varie classi (es. istruzioni) con una
struttura predefinita a livello hardware.
Le architetture di alcuni mC di progettazione
più datata (anni ’70) sono di tipo CISC (es.
Intel 8XC196, Renesas H8S, …). Si tratta
di processori estremamente diffusi, ma
raramente utilizzati in prodotti di nuova
concezione.
Simone Buso - Microcontrollori e DSP - Lezione 3
Più recentemente si sono andate affermando
architetture di tipo RISC, specialmente per i
dispositivi destinati ad usi intensivi (controllo
real-time). Le caratteristiche di questi
processori sono spesso equivalenti a quelle di
un DSP (a virgola fissa).
19
Simone Buso - Microcontrollori e DSP - Lezione 3
20
Architetture per mC e DSP
Architetture per mC e DSP
Le architetture per DSP sono normalmente
ispirate alla filosofia RISC, quindi sono
sostenute da CPU che prevedono un notevole
numero di registri e sistemi di controllo
cablati.
I DSP presentano tuttavia caratteristiche
che li differenziano notevolmente dai
processori RISC di tipo general-purpose.
Il formato delle istruzioni è compatto, ma
include numerosi campi, per aumentare la
potenza delle singole istruzioni.
Questo approccio tende a rendere il
repertorio di istruzioni asimmetrico e non
ortogonale, con conseguenti difficoltà nella
programmazione e successivo debugging.
Specialmente le prime realizzazioni su larga
scala (Texas Instruments, Motorola), si
caratterizzavano per la complessità del
linguaggio assembly e la impossibilità
materiale di ottenere una efficiente
programmazione ad alto livello (scarsa qualità
dei compilatori).
Simone Buso - Microcontrollori e DSP - Lezione 3
21
Architetture per mC e DSP
Simone Buso - Microcontrollori e DSP - Lezione 3
Architetture per mC e DSP
L’aumento della complessità degli algoritmi
usati nelle applicazioni più recenti (anni ‘90)
dei DSP (e.g. telefonia mobile) ha spinto
verso la realizzazione di architetture più
facilmente programmabili.
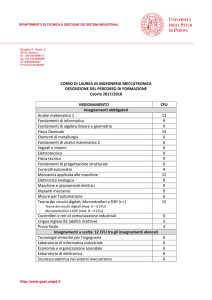
DSP convenzionale: una
istruzione complessa è
ripetuta ntaps volte.
DSP con architettura
VLIW: molte semplici
istruzioni vengono
eseguite in parallelo.
All’atto della creazione
del codice macchina,
sono collocate all’interno
di una singola VLIW.
Una soluzione molto utilizzata è denominata
VLIW (Very Long Instruction Word). Questa
architettura combina molte (4, 8) istruzioni
semplici in una sola macro-istruzione, che
viene letta tutta in una volta dalla CPU. Le
istruzioni componenti vengono eseguite in
parallelo, quindi in un solo ciclo (risc → cisc).
Simone Buso - Microcontrollori e DSP - Lezione 3
22
23
Simone Buso - Microcontrollori e DSP - Lezione 3
24
4
Architetture per mC e DSP
Architetture per mC e DSP
Il fatto che le istruzioni base siano molto
semplici rende più facile la realizzazione di
compilatori efficienti. Il fatto che la
potenza delle singole istruzioni si riduca,
richiede però più memoria per il codice
compilato. Questo si traduce in un aumento
di costo.
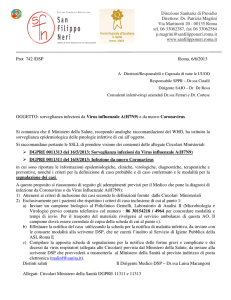
Sono stati tentati approcci differenti:
a) istruzioni a lunghezza variabile;
b) approccio SIMD;
Alcuni DSP presentano architetture con
istruzioni a lunghezza variabile.
Le istruzioni di tipo aritmetico, usate
all’interno di algoritmi di calcolo, sono di tipo
VLIW, per favorire il parallelismo e
flessibilità nell’indirizzamento dei dati.
Invece, istruzioni di tipo diverso (e.g.
istruzioni di controllo, manipolazione di bit)
sono di formato più compatto, per favorire
una minore occupazione di memoria.
c) processori “su misura”.
Simone Buso - Microcontrollori e DSP - Lezione 3
25
Architetture per mC e DSP
Simone Buso - Microcontrollori e DSP - Lezione 3
26
Architetture per mC e DSP
Altri DSP fanno uso di architetture SIMD
(Single Instruction, Multiple Data). Queste
consentono l’esecuzione in parallelo della
stessa istruzione su dati differenti,
incrementando così le prestazioni.
Questo approccio, in alcuni casi (serie Texas
C64, AD Blackfin o Tiger SHARC) viene
combinato con il VLIW. L’obiettivo in questo
caso è l’incremento massimo della potenza di
calcolo.
Benchmark: occupazione di memoria
Simone Buso - Microcontrollori e DSP - Lezione 3
27
Architetture per mC e DSP
28
Repertorio delle istruzioni nei DSP
Il repertorio delle istruzioni di un DSP, è
fortemente orientato al calcolo e include una
ampia gamma di funzioni aritmetiche, logiche
e matematiche.
Infine, per alcuni prodotti vengono utilizzati
DSP su misura (licensable cores). In questo
caso l’utilizzatore può definire un repertorio
di istruzioni ottimizzato per la sua specifica
applicazione, arrivando anche a personalizzare
l’organizzazione hardware del chip.
Per velocizzare l’esecuzione di alcuni tipici
algoritmi (DFT, filtri FIR,…), vengono inoltre
offerti modi di indirizzamento specifici.
Benchè questo approccio porti a realizzazioni
estremamente ottimizzate (nessuna risorsa
viene sprecata) introduce tempi di sviluppo
molto lunghi, costi elevati e scarsa
flessibilità.
Simone Buso - Microcontrollori e DSP - Lezione 3
Simone Buso - Microcontrollori e DSP - Lezione 3
Tra una famiglia di DSP e un’altra, possono
esserci differenze anche notevoli nel
repertorio delle istruzioni: alcuni elementi
sono però molto comuni.
29
Simone Buso - Microcontrollori e DSP - Lezione 3
30
5
Istruzioni aritmetiche nei DSP
Istruzioni aritmetiche nei DSP
La moltiplicazione è sempre presente e viene
eseguita in un solo ciclo, spesso in diverse
modalità (intera, frazionaria, con o senza
segno). E’ possibile far seguire alla
moltiplicazione una operazione di shift e/o
somma sull’accumulatore, che vengono eseguiti
nello stesso ciclo macchina. Alla
moltiplicazione è dedicato un apposito circuito
esterno alla ALU e denominato MAC.
In alcune unità è disponibile anche l’istruzione
di divisione, ma, di norma, questa non è
presente a livello hardware.
Alcuni DSP presentano la possibilità di
operare in aritmetica saturata, mettendo al
riparo da effetti indesiderati dovuti a
overflow dell’accumulatore, causati ad es. da
ripetute istruzioni di moltiplicazione e somma
(MAC).
Sempre per agevolare lo sviluppo di algoritmi
di calcolo, anche le istruzioni di shift logico
e aritmetico sono molto flessibili. Fanno
spesso uso di un circuito apposito detto
barrel shifter. Esso rende possibile scalare
agevolmente i dati durante l’elaborazione.
Simone Buso - Microcontrollori e DSP - Lezione 3
31
Istruzioni aritmetiche nei DSP
32
Istruzioni aritmetiche nei DSP
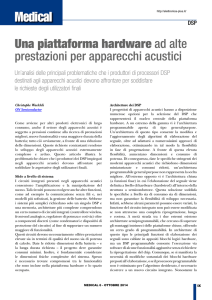
a7 a6 a5 a4 a3 a2 a1 a0 Operando a 8 bit
Molti DSP consentono al programmatore la
scelta della strategia con cui gestire le
operazioni che comportano la riduzione del
numero di bit dedicati alla rappresentazione
di un dato (es: right shift). Le opzioni
sono:
1. troncamento;
b3 b2 b1 b0
Scalo su 4 bit
b3b2b1b0 = a7a6a5a4
b3b2b1b0 = a7a6a5a4 + a3
2. arrotondamento (elimina l’errore
sistematico introdotto dalle operazioni
di troncamento);
3. arrotondamento convergente.
Simone Buso - Microcontrollori e DSP - Lezione 3
Simone Buso - Microcontrollori e DSP - Lezione 3
troncamento
arrotondamento
Arrotondamento convergente
b3b2b1b0 = a7a6a5a4 + a3
b3b2b1b0 = a7a6a5a4 + a4
33
se a3a2a1a0 <> 10002
se a3a2a1a0 = 10002
Simone Buso - Microcontrollori e DSP - Lezione 3
Istruzioni aritmetiche nei DSP
Repertorio delle istruzioni nei DSP
Nel repertorio delle istruzioni aritmetiche
sono talvolta presenti funzioni come:
a) radice quadrata;
b) funzioni trigonometriche (sinx, cosx).
Queste non sono però mai realizzate a livello
hardware e quindi richiedono molti cicli
macchina per essere calcolate.
In aggiunta alle istruzioni che realizzano le
operazioni aritmetiche fondamentali, tutti i
DSP dispongono di ulteriori istruzioni che
consentono ad esempio:
1. spostamento di dati;
2. confronto rapido di dati;
3. manipolazione di bit;
4. ripetizione di segmenti di codice;
5. salti, chiamate a subroutine;
6. emulazione di aritmetica a virgola mobile
(per i DSP a virgola fissa).
Risulta alle volte più conveniente ricorrere ad
approssimazioni polinomiali delle funzioni
suddette, che possono essere calcolate in
modo molto efficiente.
Simone Buso - Microcontrollori e DSP - Lezione 3
35
Simone Buso - Microcontrollori e DSP - Lezione 3
34
36
6
Repertorio delle istruzioni nei mC
Repertorio delle istruzioni nei mC
Storicamente, i mC hanno sempre avuto un
repertorio di istruzioni orientato al controllo
di processi più che al calcolo (elaborazione
numerica di segnali).
Molto spesso le funzioni aritmetiche più
avanzate (e.g. moltiplicazione) erano
presenti solo a livello di istruzione (i.e. non
c’era il moltiplicatore hardware).
L’esecuzione di queste istruzioni richiedeva
quindi numerosi cicli macchina.
Questo rendeva spesso problematica la
realizzazione di controlli real-time.
Attualmente, l’organizzazione dei mC (di alta
gamma) ricalca quella dei DSP a virgola fissa
di una decina di anni fa.
Il repertorio delle istruzioni di questi
dispositivi è quindi simile a quello di un DSP
(filosofia RISC, elevata regolarità,
programmabilità ad alto livello, …) e spesso
è presente il moltiplicatore hardware.
Gli accorgimenti descritti in precedenza per
l’incremento delle prestazioni (parallelismo)
non sono però riprodotti nei mC,
essenzialmente per questioni di costo.
Simone Buso - Microcontrollori e DSP - Lezione 3
37
Simone Buso - Microcontrollori e DSP - Lezione 3
Repertorio delle istruzioni nei mC
Struttura delle istruzioni
Per le applicazioni in tempo reale e
comunque in ambito industriale, spesso i mC
vengono preferiti ai DSP perché includono al
loro interno tutte le periferiche necessarie
all’interfacciamento con i tipici sistemi da
controllare (azionamenti, convertitori di
potenza, etc.).
Inoltre sono spesso più economici, dissipano
minore potenza (adatti alle applicazioni
embedded), e sono assai meno suscettibili ai
disturbi elettromagnetici tipici dell’ambiente
industriale.
Tanto nei mC che nei DSP le istruzioni hanno
strutture abbastanza regolari.
Simone Buso - Microcontrollori e DSP - Lezione 3
Tipicamente sono disponibili istruzioni fino a
tre operandi. La struttura della instruction
word (IW) è spesso funzione dell’opcode (si
riduce però la velocità di decodifica).
Il campo OPCODE è suddiviso in sotto-campi
con funzioni specifiche.
OPCODE
39
operando #2
operando #1
operando #3
Simone Buso - Microcontrollori e DSP - Lezione 3
Struttura delle istruzioni
Modi di indirizzamento
E’ possibile sviluppare architetture con
istruzioni senza operandi (macchine a stack).
Esse risultano però poco efficienti e sono
ormai state abbandonate.
Le istruzioni con un solo operando del tipo:
ADD X
sottintendono la presenza di un registro
accumulatore.
Nelle organizzazioni delle CPU a molti
registri diventano possibili istruzioni come:
ADD X, Y, Z
I più comuni modi di indirizzamento dei dati
sono:
Simone Buso - Microcontrollori e DSP - Lezione 3
38
40
• immediato: l’operando è esplicitamente
inserito nell’IW;
• a registro: l’operando è in un registro
della CPU (specificato nella IW);
• diretto o assoluto: l’istruzione contiene
l’indirizzo in memoria dell’operando;
• indiretto: l’istruzione contiene l’indirizzo
in memoria dell’indirizzo dell’operando
(puntatore).
41
Simone Buso - Microcontrollori e DSP - Lezione 3
42
7
Modi di indirizzamento
Modi di indirizzamento
DSP e mC spesso utilizzano unità per la
generazione degli indirizzi (AGU) che sono
esterne all’ALU e lavorano in background.
Ciò rende possibili modi di indirizzamento
anche più sofisticati e efficienti:
• indiretto su registro: l’indirizzo del
puntatore è contenuto in un registro
(sono possibili incrementi, offset, …);
Altri modi di indirizzamento, molto comuni
nei mC e nei DSP sono:
• indiretto con auto-incremento: l’IW
contiene l’indirizzo di un puntatore, cui
viene automaticamente sommato ±1
(talora ±2);
• indiretto con offset (indicizzato): il
puntatore viene sommato ad una costante
inclusa nell’IW per formare l’indirizzo del
dato.
• circolare: facilita la gestione di vettori di
dati (tipico dei DSP);
• a bit rovesciati: per la DFT (solo DSP).
Simone Buso - Microcontrollori e DSP - Lezione 3
43
Simone Buso - Microcontrollori e DSP - Lezione 3
Indirizzamento circolare
X0 X1 X2 X3
r
w
puntatore puntatore di
di lettura scrittura
r
X1 X2
X0
X3
w
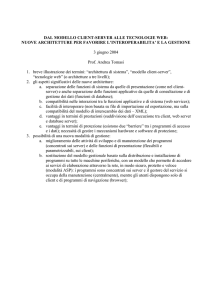
Indirizzamento a bit rovesciati
Quando uno dei
puntatori (r o w)
raggiunge la fine
del vettore deve
essere resettato.
Quando uno dei puntatori
(r o w) raggiunge la fine
del vettore passa in modo
automatico alla posizione di
partenza.
Simone Buso - Microcontrollori e DSP - Lezione 3
44
45
x0
x1
x2
x3
x4
x5
x6
x7
Y0
Y1
Y2
Y3
Y4
Y5
Y6
y7
0
1
2
DFT
3
4
5
6
7
=
=
=
=
=
=
=
=
X[000]
X[100]
X[010]
X[110]
X[001]
X[101]
X[011]
X[111]
=
=
=
=
=
=
=
=
X0
X4
X2
X6
X1
X5
X3
X7
X0
X1
X2
X3
X4
X5
X6
X7
La lettura a bit
rovesciati di una
sequenza ordinata
produce proprio
la sequenza di
uscita X della
DFT: è allora
immediato creare
il vettore
ordinato Y.
Simone Buso - Microcontrollori e DSP - Lezione 3
000
001
010
011
100
101
110
111
=
=
=
=
=
=
=
=
0
1
2
3
4
5
6
7
000
100
010
110
001
101
011
111
=
=
=
=
=
=
=
=
0
4
2
6
1
5
3
7
46
8