Premessa
La teoria della decisione di Bayes fornisce una delle metodologie
fondamentali per il riconoscimento di forme inteso come “pattern
classification”.
E’ basata sull’ipotesi fondamentale che il problema di
decisione/classificazione possa essere formulato in termini probabilistici.
Le probabilità coinvolte possono essere note o stimate.
La teoria di Bayes consente di tenere in conto sia le probabilità legate
alle diverse decisioni che i loro “costi” (o “rischi”) in modo da prendere
la decisione più “utile” (o meno “costosa/rischiosa”) in senso
probabilistico.
RICONOSCIMENTO DI FORME
Fondamenti di Teoria della Decisione
Inizieremo ad illustrare i fondamenti della teoria della decisione
Bayesiana assumendo che tutte le “probabilità” coinvolte nel
problema di decisione siano note
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
1
Concetti noti: Il criterio di decisione MAP
Corso di Riconoscimento di Forme a.a. 2006/07
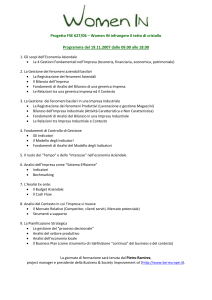
Ipotizziamo che la fase di
elaborazione d’immagine abbia
estratto (con il processo detto di
“segmentazione”) le sagome
dei pesci, ed un modulo di
“feature extraction” abbia
calcolato la luminosità media
delle regioni che coincidono
con tali sagome. Vogliamo
attribuire
alla
classe
salmone/branzino
ciascuna
delle tre regioni/sagome estratte
Prof. Ing. F. Roli
2
•Supponiamo innanzitutto che non sia possibile definire in
modo deterministico il prossimo tipo di pesce che arriverà sul
nastro trasportatore
•Il prossimo pesce che arriverà sul nastro può essere un
salmone od un branzino con una certa probabilità. Nella teoria
della decisione di Bayes questa situazione si formalizza con il
concetto di “stati di natura” (“classi”). Nel nostro esempio
abbiamo due stati/classi: 1 e 2
•Lo stato di natura , = 1 o = 2 , è una variabile aleatoria
Le due classi/stati potrebbero, ad es., essere equiprobabili
(stesse probabilità a priori):
P( 1) = P( 2) (equiprobabilità delle classi/stati)
P(
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
Esempio branzino/salmone: Criterio MAP
Rivediamo il criterio di decisione MAP, visto nei corsi di telecomunicazioni per
il progetto del ricevitore ottimo, considerando di nuovo l’esempio “giocattolo”
relativo alla classificazione di salmoni e branzini….
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
3
1)
+ P(
2)
= 1 (se non ci sono altri tipi di pesci)
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
4
Esempio branzino/salmone
Esempio di p(x |
•Supponiamo di dover decidere senza poter esaminare il
pesce che arriva sul nastro. L’unica regola di decisione
razionale è:
Decidi per 1 se P( 1) > P( 2), altrimenti decidi per 2
•Ovviamente questa regola di decisione “cieca” può
funzionare solo se P( 1) >> P( 2), o viceversa, e le
decisioni/classi hanno gli stessi “costi”
Nella maggioranza dei casi dobbiamo esaminare l’oggetto
(“pattern”) prima di classificarlo
•Possiamo acquisire delle “misure” (“feature”) per descrivere
il “pattern”
•Ad es. una misura continua x (riflettanza luminosa del
pesce).
• Poichè diversi esemplari avranno diversi valori di riflettanza
luminosa, descriveremo x come una variabile aleatoria la cui
distribuzione p(x | i) dipende dal tipo del pesce
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
5
i)
monodimensionale
•p(x | i) è la funzione di densità di probabilità di x dato lo
stato/classe (class-conditional probability density function)
Se x è la “luminosità” media della regione d’immagine associata
all’oggetto di classe i, allora la differenza fra le p(x | i) descrive le
differenze “attese” di luminosità fra i due tipi di pesce
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
Regola di Bayes
Esempio di P( i| x) monodimensionale
•Supponiamo di conoscere sia le probabilità a priori P( j) dei
due tipi di pesce che le loro funzioni di densità condizionale
p(x | j), j=1,2
•Se misuriamo la luminosità x di un pesce, per “classificarlo”
possiamo usare la naturale regola probabilistica:
p( j , x) = P( j | x) p(x) = p(x | j) P( j)
•Che possiamo riscrivere come regola di Bayes:
Esempio di P( i| x) per cui P(
P(
j
| x) = p(x |
j)
1)=2/3
e P(
6
2)=1/3
P ( j) / p(x)
Probabilità a Posteriori = (Verosimiglianza * Probabilità a
Priori) / Evidenza
Notare che: p ( x ) =
2
j =1
Corso di Riconoscimento di Forme a.a. 2006/07
p(x |
j
)P (
j
Fondamenti di Teoria della Decisione
)
Prof. Ing. F. Roli
7
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
8
Criterio MAP
•Se le funzioni di densità condizionale sono note, la regola di
decisione più razionale è quella a Massima Probabilità a
Posteriori (MAP, maximum a posteriori probability):
Se P(
Se P(
| x) > P(
1 | x) < P(
1
| x) allora è più razionale scegliere
2 | x) allora è più razionale scegliere
2
1
•Altra formulazione del criterio MAP:
Se p(x | 1) P( 1) > p(x | 2) P( 2) allora la classe vera è
altrimenti la classe vera è 2
p( x /
l ( x) =
p( x /
Test di
verosimiglianza
2
Confronto il rapporto di
verosimiglianza l(x) con una
soglia che non dipende da x
Criterio MAP e ML
1
>
<
)
2)
1
1
P( 2 )
=
P( 1 )
2
•Questa regola è razionale nel senso che minimizza l’errore per
un certo x:
P(errore | x) = P( 1 | x) se decidiamo per 2
P(errore | x) = P( 2 | x) se decidiamo per 1
•Notare che l’ “evidenza” p(x) non conta.
Casi particolari:
•Se p(x| 1)=p(x| 2), allora decido solo sulla base delle
probabilità a priori delle classi
•Se P( 1)=P( 2), allora decido solo sulla base delle
verosimiglianze (Criterio ML, Maximum Likelihood)
•E si dimostra che minimizza anche l’errore medio:
P(errore) =
+
+
P(errore, x )dx = P(errore x) p( x)dx
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
9
Corso di Riconoscimento di Forme a.a. 2006/07
Interpretazione geometrica: regioni di decisione
R1 = {x R: l(x) > } e R2 = {x R: l(x) < } (un campione x
tale che l(x) = può essere inserito arbitrariamente in R1 o in R2).
2),
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
10
MAP e ML con più classi
Un test di verosimiglianza è definito non appena siano noti il rapporto di
verosimiglianza l(x) e la soglia . Fissato il test di verosimiglianza sono
univocamente definite le regioni di decisione R1 e R2 nello spazio R del
parametro x.
–Fissate le densità di probabilità p(x| 1) e p(x|
pertanto univocamente determinate dalla soglia
N.B. Confronto il rapporto di
verosimiglianza con il rapporto fra i
“priors”
R
le regioni R1 e R2 sono
Esempio con Gaussiane
Ovviamente la regola di decisione MAP a più classi è:
x
i
P(
i
| x) > P (
j
| x)
i
j, i=1,...,c
E la regola ML viene di conseguenza
Dal punto di vista della soglia di decisione , è ovvio che ci saranno più
soglie. Definite, di volta in volta, fra le due classi s e t tali che:
P(
s
| x) > P(
i
| x)
P(
t
| x) > P (
i
| x)
s, t
i, s
t i=1,...,c
Nell’esempio riportato, le soglie di decisione saranno in corrispondenza di
x12 e x23
R1 = R 1( )
R2 = R2( )
R1
Corso di Riconoscimento di Forme a.a. 2006/07
R2
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
11
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
12
Elementi di calcolo della probabilità di errore
Elementi di calcolo della probabilità di errore
•Nel caso semplice a due classi:
P(errore) = P{x R2 , 1} + P{x R1 , 2 } =
= P ( 1 ) P{x R2 | 1} + P( 2 ) P{x R1 | 2 } =
= P ( 1 ) p ( x | 1 )dx + P ( 2 ) p( x | 2 )dx
R2
•Nel caso a più classi è più semplice passare attraverso il calcolo
della probabilità di classificazione corretta:
R1
Nella pratica si ha spesso un errore
aggiuntivo (“reducible error”) perché
la soglia ottimale è difficile da stimare
Fondamenti di Teoria della Decisione
13
Prof. Ing. F. Roli
i
| x) > P (
i=1
j
| x)
i
j, i=1,...,c
P ( errore /
Ri
)P(
i
14
Prof. Ing. F. Roli
Pertanto possiamo scrivere la probabilità di errore come:
=
i
Fondamenti di Teoria della Decisione
c
p( x /
i
i = 1 C [ Ri ]
c
i =1
Corso di Riconoscimento di Forme a.a. 2006/07
P ( errore ) =
La probabilità di errore si può scrivere come:
P ( errore ) =
i=1
MAP e minimizzazione della probabilità di errore
Vediamo ora in dettaglio perché la regola MAP seguente garantisce di
minimizzare la probabilità di errore.
P(
i=1
Fattibile solo per Gaussiane monodimensionali con stessa varianza !
MAP e minimizzazione della probabilità di errore
i
c
E’ chiaro che il calcolo della probabilità di errore richiede di calcolare
degli integrali multipli (in generale in Rd) estesi alle regioni di decisione,
Provare a fare i conti !
il che è un problema analiticamente complesso.
=x* è subottima, e infatti genera un
errore “aggiuntivo”
x
c
P(errore) = 1 P(corretto)
La soglia ottimale è =xB (soglia
ottima Bayesiana, per cui ho l’errore
minimo, detto Bayes error)
Corso di Riconoscimento di Forme a.a. 2006/07
c
P(corretto) = P{x Ri , i } = PP
i {x Ri / i } = Pi p(x| i )dx
c
P(
i =1
)
i) 1
)P(
i
)dx =
c
i ) dx = 1
p( x /
P(
i =1
Ri
i
)
p( x /
i
) dx
Ri
Da cui si vede che minimizzare la probabilità di errore è equivalente a
massimizzare la probabilità di corretta classificazione:
Dove: P ( errore /
i
)=
p( x /
i )dx
c
P(
C [ Ri ]
C [Ri] è l’insieme delle regioni “complemento” di Ri, cioè C[ Ri ] =
i =1
c
UR
j
j =1, j i
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
15
i
)
p(x /
i
) dx
Ri
Ma questo significa che le regioni di decisione Ri vanno definite in modo tale
che P( j | x) = p(x | j)P ( j) sia massima, il che dimostra che la regola MAP
minimizza la probabilità di errore.
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
16
Cenno alla maggiorazione della probabilità di errore
•Date le difficoltà di calcolo, esistono dei metodi, calcolabili più semplicemente,
per avere una maggiorazione della probabilità di errore
•Chernoff bound
Ora generalizzeremo i concetti visti in corsi precedenti:
•Bhattacharyya bound
1. Consentendo l’uso di più di una misura (“feature space”): x =
(x1, x2,…., xd) vettore a “d” elementi
Per chi è interessato si veda il Capitolo 2.8 del libro Pattern Classification, di R. O.
Duda, P. E. Hart, e D. G. Stork, John Wiley & Sons, 2000
•Anche se più semplici si tratta comunque di formule calcolabili analiticamente
solo nel caso Gaussiano, che comunque danno delle maggiorazioni spesso poco
precise; quindi poco utili nella pratica, a meno che la maggiorazione non mi dia
un errore già accettabile per la mia applicazione. Inoltre se le distribuzioni non
sono Gaussiane la maggiorazione può risultare inaffidabile.
Per tali motivi nel seguito del corso vedremo alcuni metodi
sperimentali che si utilizzano per stimare la probabilità di errore di un
algoritmo di classificazione.
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
17
Dall’errore al rischio
P ( errore / x
i
c
)=
P(
j =1, j i
j
| x) = 1
P(
i
| x)
In certe applicazioni gli errori possono avere costi diversi, e quindi le relative
probabilità vanno pesate diversamente. Se i costi possono essere diversi la
sommatoria di cui sopra non è più definibile come una “probabilità”. Si parla
pertanto di rischio R( i / x)
i
| x) =
c
j =1
w ij P (
Corso di Riconoscimento di Forme a.a. 2006/07
2. Consentendo la presenza di più di due classi
3. Introducendo il concetto di “rischio”, come generalizzazione
del concetto di errore
4. Consentendo di “non decidere”, se decidere è troppo
costoso/rischioso ed è fattibile rinviare la decisione o farla
prendere da un “altro” (opzione di “rigetto”)
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
18
Teoria del Minimo Rischio
Dalla formula dell’errore per un generico pattern x è facile vedere che stiamo
assumendo che tutti gli errori, o meglio le probabilità di commettere un errore
perché j i , abbiano lo stesso “costo” unitario.
R(
Teoria della Decisione di Bayes
j
| x)
I pesi wij rappresentano i
costi degli errori. In seguito li
indicheremo come ( i / j)
Notare che wii può essere
diverso da zero (“guadagno”)
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
19
•Il criterio MAP non tiene conto degli eventuali “rischi/costi” associati ai
diversi errori di classificazione
•In molte applicazioni questo criterio di decisione è del tutto
inappropriato, perché le decisioni/“azioni” relative a diverse
classificazioni possono avere costi molto diversi
•La teoria del minimo rischio (detta anche teoria dell’utilità in campo
economico) tiene conto sia delle probabilità degli eventi che dei costi
associati alle diverse decisioni/azioni
Formulazione del problema:
–insieme delle classi:
= { 1, 2, ..., c};
–insieme delle azioni/decisioni possibili
classificazione: A = { 1, 2, ..., a};
in
funzione
della
Per noi l’azione/decisione sarà quasi sempre una classificazione
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
20
Teoria del Minimo Rischio
Esempio di matrice dei costi per Intrusion Detection Systems
I costi delle azioni che è possibile intraprendere dipendono dalle
classificazioni e sono definiti da una matrice dei costi :
! ( 1 | 1)
# ( | )
2
1
=#
# M
# ( | )
% a 1
( 1 | 2 ) L ( 1 | c )"
( 2 | 2 ) L ( 2 | c )$
$
M
O
M
$
( a | 1) L ( a | c )$&
La
funzione
( i| j )
indica la “perdita/costo”
che si avrebbe compiendo
l’azione i quando lo stato
di natura/classe è j
Esempio di matrice dei costi per l’intrusione in un sistema informatico
={ 1= intrusione in atto,
2=
2=traffico
normale}; A= {
1=
continuo a erogare servizio};
! 0
= #
% 21
12
0
"
$
&
blocco il “server”,
Sistema informatico bancario:
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
12
<<
21
Prof. Ing. F. Roli
21
Criterio di decisione a rischio minimo
c
j =1
( i|
j )P(
x
i
R(
R( j| x) ' R( i| x) i = 1, 2, ..., R
i
| x) < R (
j
| x)
i
j, i=1,...,a
Fondamenti di Teoria della Decisione
0
2
2
1
2
Attacco
3
User to
Root
0
2
2
2
Attacco
Remote
to Local
4
2
0
2
2
Attacco
Probing
1
2
2
0
2
Denial of
Service
3
2
2
1
0
Traffico
Normale
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
22
Prof. Ing. F. Roli
Prof. Ing. F. Roli
Esaminiamo il caso
azione=classificazione
•Sia
i
particolare
di
due
sole
l’azione di decidere che la classe corretta è
ij=
(
i
| j) il costo di scegliere
i
classi
R(
1
x) =
11
P(
1
x) +
R(
2
x) =
21
P(
1
x) +
12
se il vero stato di natura
P(
22
23
decidere
1
se R(
Corso di Riconoscimento di Forme a.a. 2006/07
1
|x) < R(
2
e
i
2
P(
2
x)
x)
•La regola di decisione fondamentale è:
Dato il pattern x si sceglie l’azione i a rischio minimo. Abbiamo
così una regola di decisione per ogni pattern x.
Corso di Riconoscimento di Forme a.a. 2006/07
Denial of
Service
•Possiamo riscrivere il rischio condizionato come:
Criterio di decisione a rischio minimo:
j
Attacco
Probing
•Sia
è j
j | x) = E { ( i | )| x}
Il rischio condizionato può essere visto come un costo medio
xa
Attacco
Attacco
User to Remote
Root
to Local
Rischio minimo per classificazione binaria
•Supponiamo di voler eseguire l’azione
seguito
i in
all’osservazione di un pattern x. Dato che non sappiamo quale è il
vero stato di natura, ma conosciamo P( j|x), possiamo dire che il
rischio condizionato associato all’azione i è
R( i |x) =
Traffico
Normale
|x), e viceversa per
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
2
24
Rischio minimo per classificazione binaria
Classificazione a minimo errore e matrice dei costi 0-1
•In termini di probabilità a posteriori:
Nella classificazione l’azione i viene interpretata come
l’assegnazione del “pattern” x alla classe i.
decido
se
1
(
21
11
)P(
1
x) > (
12
)P(
22
x)
2
Una funzione di costo semplice e naturale in questi casi è:
•Applicando la regola di Bayes otteniamo:
decido
1 se
(
11 ) p ( x
21
1) > (
1 ) P(
22 ) p ( x
12
2 ) P(
(
2)
•Inoltre è ragionevole assumere che 21> 11. Mettendo in
p ( x 1 ) p ( x 2 ) la
evidenza il rapporto di verosimiglianza
regola di Bayes può essere interpretata come segue:
1
p( x
p( x
se l (x) =
Corso di Riconoscimento di Forme a.a. 2006/07
1)
2)
>
(
(
) P(
11 ) P (
12
2)
22
21
Fondamenti di Teoria della Decisione
1)
R (
1
i
| x) =
i
i , j = 1, ..., c
j
Matrice dei costi 0-1 o
“zero-one loss function”
c
(
j=1
=
=
|
j
)P (
| x)
j
| x) = 1
j
P(
Fondamenti di Teoria della Decisione
i
se P(
i
| x) > P(
j
| x)
Classificazione a minimo errore e “regioni” di decisione
j
=
12
22
21
11
Se
Esempi
Se
.
P( 2 )
=
P( 1 )
=
=
allora x
0
1
1
0
0
1
Corso di Riconoscimento di Forme a.a. 2006/07
2
0
a llo r a
a llo ra
12
21
i
Se gli errori su 1 costano di
più allora la soglia diventa
più
restrittiva
e
di
conseguenza si riduce R1
In termini di rapporto di verosimiglianza:
Se
26
Prof. Ing. F. Roli
Con la matrice dei costi 0-1 la regola di decisione è la classica
MAP (maximum a posteriori probability):
Assegno x a
| x)
i
i
Corso di Riconoscimento di Forme a.a. 2006/07
Classificazione a minimo errore
i
P (
j
25
Prof. Ing. F. Roli
0 i = j
Tutti gli errori hanno lo stesso costo unitario. Il rischio con questa
funzione di costo è esattamente la probabilità media di errore:
Decido per 1 se il rapporto di verosimiglianza eccede una
soglia che è indipendente dall’osservabile x
decido
j) =
i,
se:
1
=
=
Fondamenti di Teoria della Decisione
p( x |
p( x |
P (
P (
2
1
2P (
P (
Prof. Ing. F. Roli
1)
2)
>
)
=
)
2
1
)
)
La classe 1 deve essere tanto
più “verosimile” quanto più
12 > 21
a
=
b
In Figura
a
è la soglia per il caso di P(
La soglia
b
è relativa al caso
12
>
Corso di Riconoscimento di Forme a.a. 2006/07
2)
e
12
=
21
=1
21
La regione R1 ovviamente si riduce se
27
1)=P(
12
>
Fondamenti di Teoria della Decisione
21
Prof. Ing. F. Roli
28
Nota su “test” di verosimiglianza e “regioni” di decisione
Un test di verosimiglianza riporta il problema della decisione in
uno spazio delle “feature” d-dimensionale ad un test mono
dimensionale sulla singola grandezza scalare , senza bisogno di
conoscere esplicitamente le regioni di decisione.
Esempio di problemi nell’uso del minimo rischio nella rivelazione attacchi
informatici
={ 1= intrusione in atto,
2=
2=traffico
normale}; A= {
continuo a erogare servizio};
! 0
Matrice dei costi:
= #
% 21
12
0
1=
blocco il “server”,
"
$
&
La regola di decisione a minimo rischio è:
–Le regioni di decisione possono essere anche sottoinsiemi molto
complessi dello spazio delle “feature” (anche non connessi,
vedremo degli esempi in seguito), ma un loro calcolo esplicito non
è essenziale per la classificazione di un dato campione x.
–Per classificare x è sufficiente calcolare l(x) e confrontarne il
valore con la soglia .
blocco il "server" se l (x) =
p ( x attacco)
>
p ( x normale)
E’ ovviamente ragionevole che sia:
12
<<
12
21
P( normale)
=
P (attacco)
21
Come fissare i costi ?
Come fissare le probabilità priori ?
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
29
Problemi nell’uso del minimo rischio nella rivelazione attacchi informatici
Come fissare i costi ?
Corso di Riconoscimento di Forme a.a. 2006/07
21
l ( x) =
R = R ( ( x ) x ) p ( x ) dx
1
P (normale)
= * P*
P (attacco)
R=
•E mi accorgo che poter stimare P* mi aiuta a decidere i costi
12
<<
21
per avere un
Prof. Ing. F. Roli
( i|
j ) p(x /
j )P(
j )dx
•Questa verifica ci consentirà anche di introdurre alcuni concetti importanti nelle
applicazioni (probabilità di falso e mancato allarme), e di vedere un problema di
classificazione binaria come un problema di “test di ipotesi” (“hypothesis testing”)
Per vedere la teoria in un caso concreto, consideriamo il problema della
verifica d’identità mediante riconoscimento di impronte
•Se non posso stimare P* ? Vedremo il criterio del Minimax
Fondamenti di Teoria della Decisione
c
•E’ interessante verificare che il criterio di decisione “locale” (cioè applicato per ogni
pattern x) a minimo rischio minimizza il rischio globale su tutto lo spazio delle
“feature”
•Metto bene in evidenza la relazione fra le probabilità a priori ed i costi
Corso di Riconoscimento di Forme a.a. 2006/07
a
i =1 j =1
p ( x / attacco)
1
> * P* =
p( x / normale)
•Tanto più P* è grande, tanto più dovrò scegliere
algoritmo sensibile agli attacchi
30
Minimizzazione del rischio globale
Se riscrivo le cose nel seguente modo:
12
Prof. Ing. F. Roli
•Dato che l’azione intrapresa dipende dall’osservazione del pattern x
attraverso la funzione (x), il Rischio Globale è
Come fissare le probabilità priori ?
=
Fondamenti di Teoria della Decisione
31
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
32
Verifica d’ipotesi nel riconoscimento d’impronte
•La verifica
dell’ipotesi
d’identità viene
fatta sulla base di d
misure, dette
minuzie, estratte
dall’immagine
dell’impronta
Si deve decidere fra due ipotesi (classi):
Dante Rossi
•Genuino
•Impostore
Sono
Dante Rossi !
A. Neri
B. Verdi
C. Bianchi D. Rossi E. Gialli
Database di impronte digitali
MINUTIAE
EXTRACTION
Regioni di decisione
Verification
Score
MINUTIAE
VERIFICATION
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
+ 21P( genuino/ impostore) Pim
( postore)+ 22P( genuino/ genuino) P(genuino)
R1
R1
Pgenuino
(
|impostore) = ps
( |impostore)ds =PMA, Pgenuino
(
|genuino) = ps
( |genuinods
) =1 PMA
PFA) Pimp + 12PFAPgen + 21PMAPimp + 22(1 PMA)Pgen
R2
R1) l’utente è un impostore
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
34
Prof. Ing. F. Roli
Riscrivendo il rischio in forma integrale:
R=
p(s|impostore)ds Pimp +
11
+
R1
p(s|impostore)ds Pimp +
21
p(s|genuino)ds Pgen
22
R2
poichè p(s|impostore)ds = 1
R2
R=
p(s|genuino)ds Pgen +
12
R1
R1
p(s|impostore)ds Pimp +
11
R1
R2
p(s|genuino)ds
R1
p(s|genuino)ds Pgen +
12
R1
p(s|impostore)ds +
21Pimp
21Pimp + 22Pgen +
22Pgen
p(s|genuino)ds =
22Pgen
R1
Pimp(
11
21)p(s|impostore) + Pgen( 12
22 )p(s|genuino)ds
R1
Per minimizzare il rischio l’integrando deve essere negativo
Pgen=P(genuino); Pimp=P(impostore);
Prof. Ing. F. Roli
p(s|genuino)ds = 1
p(s|impostore)ds
R1
PMA: Probabilità di Mancato Allarme (o False Acceptance Rate, FAR)
Fondamenti di Teoria della Decisione
Altrimenti (s
+ 21Pimp
PFA: Probabilità di Falso Allarme (o False Reject Rate, FRR)
Corso di Riconoscimento di Forme a.a. 2006/07
Se s appartiene a R2 allora l’identità è verificata (genuino)
R2
Pim
( postore|impostore) = ps
( |impostore)ds =1 PFA, Pim
( postore|genuino) = ps
( |genuinods
) =PFA
(1
Ora ipotizziamo che
p(s/genuino) e
p(s/impostore) siano
perfettamente note
Minimizzazione rischio globale
( postore)+ 12P( impostore/ genuino) P(genuino)+
R = E{rischio} = 11P( impostore/ impostore) Pim
11
Impostori
33
Il decisore ottimale deve definire le regioni R1 e R2 in modo tale da
minimizzare il rischio globale atteso:
R=
•Sulla base di queste
distribuzioni vengono
definite le regioni di
decisione R1 e R2
Ipotizziamo che lo spazio S degli “score” d’identità sia suddiviso in due regioni R1 e R2 tali
che:
Probabilità di falso e mancato allarme
R2
Genuini
•Si confrontano le
minuzie delle
impronte
La decisione è presa sulla base dello “score”,
numero reale fra 0 ed 1
Corso di Riconoscimento di Forme a.a. 2006/07
•Esempio di
distribuzioni
campionarie degli
“score” dei genuini e
degli impostori
35
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
36
Minimizzazione rischio globale
Pimp (
Criterio di decisione Minimax
21 )p(s|impostore) + Pgen ( 12
11
Pimp (
11 )p(s|impostore) > Pgen ( 12
21
p(s|impostore) Pgen (
>
p(s|genuino) Pimp (
12
22 )
21
11 )
•In alcuni casi reali le probabilità a priori possono variare nel
tempo, od essere difficilmente stimabili (attacchi informatici,
spamming, ecc.). Serve allora una strategia di classificazione che
possa funzionare anche in assenza della conoscenza delle
probabilità a priori
22 )p(s|genuino) < 0
22 )p(s|genuino)
Ma l’ultima è la regola di decisione “locale” a minimo rischio da applicare
ad ogni “pattern” “s”
Abbiamo quindi dimostrato che tale regola, se applicata ad ogni pattern s,
minimizza il rischio globale
•Un approccio (utilizzato in molti problemi dell’ingegneria) è
quello di dimensionare la soluzione sul “caso peggiore”
•Progettiamo il classificatore in modo da minimizzare il rischio
nel caso peggiore al variare delle probabilità a priori
•Minimax: Minimizzo il rischio Massimo
•E’ chiaro che si tratta di un progetto sul caso “peggiore”. Sarà
sovradimensionato, e quindi con prestazioni peggiori delle
migliori ottenibili, quando non mi trovo nel caso peggiore
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
37
Prof. Ing. F. Roli
Criterio di decisione Minimax
Consideriamo un problema a due classi e le regioni di decisione
(inizialmente non note) R1 e R2. Il rischio globale si può scrivere come:
(
R=
11
* P1 * p ( x
1
)+
12
* P2 * p ( x
2
) )dx +
P2 = P(
(
21
* P1 * p ( x
1
)+
22
* P2 * p ( x
2
) )dx
2
)
)2
Sapendo che P2=1- P1 e che
R (P1 ) =
22
+(
12
22
)
p( x
p(x
11
22
)+ (
21
11
)
=1
)1
2
p( x
) dx +
1 )d x
1
N.B. obiettivo dei passaggi
algebrici è esprimere R in funzione
di P1 e ridurre il numero di integrali
)dx + (
22
)2
Corso di Riconoscimento di Forme a.a. 2006/07
p(x
)2
)1
!
+ P1 #(
%#
1 )d x
Fondamenti di Teoria della Decisione
12
)
p( x
)1
Prof. Ing. F. Roli
"
)
dx
$
2
&$
39
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
38
Criterio di decisione Minimax
R ( P1 ) =
22
+(
12
22
)
!
"
... + ...$
2 ) dx + P1 * #... +
#%
)2
)1 $
&
p( x
)1
P1 = P( 1 )
)1
+
Corso di Riconoscimento di Forme a.a. 2006/07
Ricordiamo che i costi e le probabilità a priori definiscono univocamente la soglia
, che assieme alle densità definisce le regioni di decisione R1 e R2 ed il rischio.
p( x /
l ( x) =
p( x /
1
1) >
2) <
2
R1 = { x : l ( x ) >
(
(
12
21
) P(
11 ) P (
22
)
=
)
1
2
} , R2 = { x : l ( x ) < }
•Nel caso in esame al variare di P1 varierà la soglia (P1), le relative regioni di
decisione, e quindi il rischio. Questo non mi consente di controllare il rischio.
Problema: poiché P1 è incognita vorrei controllare il rischio a cui
vado incontro, nel senso di poterlo valutare una volta per tutte
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
40
Criterio di classificazione Minimax
R (P1 ) =
Minimax: Rischio in funzione di P(
!
"
+
*
+
+
)
dx
P
...
...
...
#
$
12
2
1
#
$&
)1
)
)
2
1
%
14444
4244444
3
22 + (
22 )
p( x
-
Rmm , minimax risk
Questa equazione mostra che una volta definite le regioni di
decisione (R1 e R2), il rischio globale è lineare in P1.
Se R1 e R2 sono tali che il termine in parentesi quadre è nullo, allora
il rischio è indipendente dalle probabilità a priori.
Questa è la soluzione minimax, ed il rischio minimax, Rmm, è:
R mm =
22
+
(
12
22
)
p(x
2
11
+
(
11 )
21
)
p(x
11
Nei casi pratici di
classificazione si ha
22= 11=0
22
0
0,2
0,4
0,6
0,8
1
P1
Dalla formula precedente di R(P1) è facile vedere che:
) dx =
)1
=
1)
1 ) dx
P1 = 0 implica che la regione R1 è vuota, e quindi R=
22
P1 = 1 implica che la regione R2 è vuota, e quindi R=
11
2
Verificate per esercizio questa uguaglianza
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
41
Prof. Ing. F. Roli
Minimax: Retta di Rischio
-
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
Minimax: retta a rischio massimo
-
R(P*1)
-
max
-
11
0,2
0,4
0,6
max
11
P1*
22
P1 *
22
0
42
P1
0,8
1
0
P1
0,2
0,4
0,6
0,8
1
Supponiamo che in un certo istante si abbia P( 1)=P1*=0.6 , e
quindi il rischio associato alle regioni di decisione R1(P1*) e
R2(P1*) sia R(P1*)
A questo punto è chiaro che per evitare di avere variazioni incontrollate del
rischio conviene scegliere il valore di P1* che determina la retta a pendenza nulla
Se poi nel tempo P1 varia, dalla formula precedente si vede che il
rischio varierà linearmente, essendo le regioni di decisione
determinate sulla base di P1*=0.6
In questo modo minimizzo il massimo rischio che si ha al variare delle
probabilità a priori delle classi (Minimax). Qualsiasi altra scelta produce infatti
una retta di rischio che può dare dei valori di rischio superiori al variare di P1*
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
43
Le relative regioni di decisione R1(P1*) e R2(P1*) danno il rischio massimo Rmax
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
44
Minimax: retta a rischio massimo
-
-
Calcolo empirico della retta a rischio massimo
!
#( 11 22 ) + ( 21 11 ) p(x 1)dx + ( 22 12 ) p(x
#%
)2
)1
max
11
P1 *
22
P1
0
0,2
0,4
0,6
0,8
1
Per trovare le regioni di decisione R1( ) e R2( ) della retta Minimax:
!
#(
#%
11
22
) +(
21
11
)
p(x
1 )dx +
(
"
12 ) p( x 2 )dx$ = 0
$&
)1
22
)2
E’ quindi necessario determinare le regioni di decisione che soddisfano questa
equazione
Cosa fattibile in alcuni casi trattabili analiticamente, ma difficile in molti casi
pratici
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
)2
1 ) dx
p( x
2 ) dx
=0
)1
p( x
1 ) dx
)2
=
p( x
2 ) dx
)1
La soglia . è quella che rende uguali le due probabilità di errore (PFA=PMA).
Nel riconoscimento di impronte viene detta soglia EER (Equal Error Rate)
Genuini
Impostori
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Notare che la soglia
. che rende uguali le
due probabilità di
errore (PFA=PMA) non
coincide
necessariamente con
la soglia ottima
Bayesiana. Sto infatti
usando il criterio
Minimax, e non il
criterio “puro” del
minimo rischio
Prof. Ing. F. Roli
R1 = { x : l ( x ) >
*} , R 2 = { x : l ( x ) <
*}
Notare che:
*
(
(
12
21
) P(
11 ) P (
22
E’ come se cercassimo la soglia ottima .
senza usare la conoscenza della probabilità
a priori e dei costi !
2)
1)
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
46
Calcolo empirico della retta a rischio massimo: Caso generale
Per matrici di costo 0-1
p( x
Se notiamo che i due integrali sono gli errori commessi su ciascuna delle due
classi (come abbiamo visto in alcune applicazioni tali errori sono detti PFA e
PMA), allora è chiaro che questi errori sono controllabili mediante la scelta della
soglia . Ed in linea di principio posso cercare un valore . che soddisfi
l’equazione precedente. Tale valore identificherà le regioni R1( .) e R2( .).
45
Calcolo empirico retta a rischio massimo per costi 0-1
"
2 )dx$ = 0
$&
47
!
#(
#%
11
22 ) + (
21
11
)
1 )dx + (
p(x
22
)2
12
)
p(x
)1
"
)
dx
$ =0
2
$&
In generale per poter effettuare il calcolo empirico ho bisogno di un
“classificatore” del quale posso controllare le regioni di decisione R1 e R2.
Cosa non sempre fattibile facilmente
Nel caso di costi 0-1 posso cercare di variare i “parametri” del classificatore in
modo da ottenere:
p( x
)2
1 ) dx
=
p( x
2 ) dx
)1
Praticamente significa che vario i parametri e poi stimo le due probabilità
d’errore per cercare di renderle uguali
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
48
Criterio di decisione di Neyman-Pearson
Quando non sono noti nè le probabilità a priori nè i valori da attribuire alle
componenti della matrice di rischio, si può utilizzare il criterio di decisione di
Neyman-Pearson.
Questo criterio è anche utilizzato nelle applicazioni dove si vuole fissare una
certa probabilità di falso allarme e minimizzare poi la probabilità di mancato
allarme (es. nelle applicazioni radar o nel riconoscimento biometrico)
– Si fissa una certa PFA (prob. di falso allarme) desiderata, PFA = .
– Il criterio di Neyman-Pearson minimizza la PMA sotto il vincolo PFA = .
– A tal fine si introduce un moltiplicatore di Lagrange / 0, minimizzando
il seguente funzionale per il caso a due classi:
!
"
F = PMA + ( PFA
) = p ( x | 1 ) d x + # p( x | 2 ) d x
$=
#% R1
$&
R2
!
"
p( x | 2 ) d x
= p( x | 1 ) d x + #1
$=
#% R2
$&
R2
= (1
)+
[ p( x |
1)
p( x |
2 )]d x
Criterio di Neyman-Pearson nel caso a due classi
Il problema è quello di definire il dominio R2 che risolve il problema di minimo
vincolato.
– Trascurando il termine costante nel funzionale, il problema di
minimizzazione è pertanto:
min [ p( x |
11 R2 0 R R2
1 PFA = p( x |
1
R1
1)
p( x |
2 )dx
2 )]dx
=
– Entrambi i termini integrandi in parentesi quadra sono positivi: si ha
quindi il minimo quando la funzione integranda è negativa per ogni x
R2. Pertanto R2 = {x R: p(x| 1) < p(x| 2)} = {x R: l(x) < }.
– Ne consegue il seguente criterio di decisione:
l( x ) =
p( x |
p( x |
1)
2
)
¤
1
2
R2
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
49
Criterio di Neyman-Pearson: calcolo della soglia
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
50
Neyman-Pearson: esempio nel caso biometrico
Il metodo di Neyman-Pearson genera nuovamente un test di verosimiglianza.
La soglia del test coincide col moltiplicatore
e si calcola imponendo la
condizione di vincolo.
– Poiché PFA = PFA( ), l’equazione PFA = identifica implicitamente i
valori ammissibili di .
– Più esplicitamente, introducendo la variabile aleatoria l= l(x) (funzione
di x), si ha:
Genuini
Impostori
+
PFA = P{l ( x) > | 2 } = pl (l| 2 )dl = 2 =
dove
+
pl (l |
2
*
) dl =
*
Non è detto che variando PFA vari con continuità (soprattutto quando si
usano distribuzioni “stimate” dai dati). Nella pratica si cerca di soddisfare
“sperimentalmente” il vincolo PFA '
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
51
In questo caso è semplice trovare una soglia
calcolata sulle distribuzioni
stimate che mi dia una PFA ' . Non faccio altro che provare sperimentalmente
tante soglie fino a che non trovo quella che rispetta il vincolo.
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
52
Neyman-Pearson e curva ROC
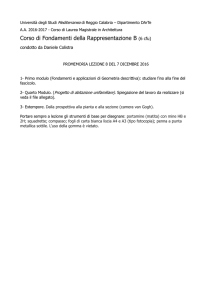
Criterio di decisione con opzione di rigetto
Per analizzare le prestazioni al variare della soglia si utilizza la curva ROC
(Receiver Operating Characteristic).
•Anche nel caso ottimale di
classificatore che mi fornisce l’errore
minimo di Bayes (soglia xB in figura),
non è detto che questo livello di errore
sia applicativamente accettabile.
La curva ROC rappresenta l’andamento della PD in funzione della PFA al variare
della soglia.
PD
Consente di analizzare come può
•Esempio: “screening” per diagnosi
medica. Voglio che il numero di “falsi
negativi” sia pari a zero
variare il compromesso fra le
probabilità di falso e mancato allarme
•E’ abbastanza intuitivo che questo
implica
Con il criterio di Neyman-Pearson al variare della soglia ottengo diverse PFA e
diversi valori della probabilità PD di corretta rilevazione (PD=1- PMA).
1
La curva ROC è tanto migliore
quanto più posso ottenere una PFA
piccola ed una PD grande.
La ROC ideale è la funzione
“rettangolo”
Esempi di ROC
Corso di Riconoscimento di Forme a.a. 2006/07
Modo “ovvio” di non sbagliare
è “non decidere”
PFA
1
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
53
Classificazione con opzione di rigetto
x
d
x R
CLASSIFICATORE
o,
Corso di Riconoscimento di Forme a.a. 2006/07
La matrice
i
! ( 0 | 1)
# ( | )
1
1
=#
# M
# ( | )
% c 1
Rigetto
classe che contiene i “rigetti”
Fondamenti di Teoria della Decisione
E’ chiaro che questo implica che sia
razionale “astenersi”, e che ci sia una
ulteriore fase di decisione (manuale od
automatica)
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
54
dei costi, di dimensione (c+1) c, sarà pertanto:
Prof. Ing. F. Roli
55
( 0 | 2 ) L ( 0 | c )"
( 1 | 2 ) L ( 1 | c )$
$
M
O
M $
( c | 1) L ( c | c )$&
Il criterio di decisione è sempre quello a minimo rischio:
x
i
R(
i
| x) < R (
j
| x)
i
j, i=0,1,..,c
La differenza sostanziale è che in alcuni casi può essere meno rischioso non
decidere, cioè rigettare, quando:
R(
Corso di Riconoscimento di Forme a.a. 2006/07
Per ridurre la probabilità di errore si
può decidere di astenersi dalla decisione
(opzione di rigetto)
Matrice dei costi e minimo rischio con rigetto
E’ intuitivo che l’opzione di rigetto implica che si debba aggiungere una
decisione/classificazione in più rispetto alla precedente formulazione del
problema di classificazione:
–insieme delle classi:
= { 1, 2, ..., c};
–insieme delle azioni/decisioni possibili in funzione della
classificazione: A = { o, 1, 2, ..., a};
–nel caso della pura classificazione: A = { o, 1, 2, ..., c};
Ho quindi una classe in più :
che sbagliare è molto costoso
(almeno oltre un certo livello di
errore), e quindi è necessario
cautelarsi
0
| x) < R (
Corso di Riconoscimento di Forme a.a. 2006/07
j
| x)
j
Fondamenti di Teoria della Decisione
0
Prof. Ing. F. Roli
56
Classificazione binaria con costi uguali
Classificazione binaria con costi uguali
Vediamo il caso con due sole classi e costi uguali rispetto alle classi:
=
Costo rigetto =
r
Il rischio totale R si può scrivere come:
R =
r
r
( 0 | 1)
( 0 | 2)
c
e
= ( 1 | 1)
+
( 1| 2)
+
c
e
( 2 | 2)
( 2 | 1)
Costo errore =
e
Costo classificazione corretta =
=
c (spesso
{
R1 = { x
R2 = { x
R : R(
0
R : R(
1
R : R(
Corso di Riconoscimento di Forme a.a. 2006/07
2
| x) < R (
| x) < R (
| x) < R(
j
j
j
| x)
j
| x)
j
| x)
j
Fondamenti di Teoria della Decisione
+
}
1}
2}
0
Prof. Ing. F. Roli
+
57
Il compromesso errore-rigetto
r P ( rigetto ) +
e P (errore) +
c P (corretto )
poichè P ( rigetto) + P (errore) + P (corretto) = 1 possiamo scrivere
R=(
r
c ) P ( rigetto ) + ( e
[P (erro re, x
c [ P ( c o r r e tto , x
r
e
c
!
#P(
#%
1)
c ) P (errore)
!
#P(
%#
1)
) + P (erro re, x
1
1 )dx + P (
p(x /
!
#P(
#%
1)
2
2
) + P ( c o r r e tto , x
2 )
p(x /
R0
p(x /
1 )dx + P (
2 )
R2
p(x /
1 )dx + P (
2 )
2
)] =
"
)
d
x
+$ +
2
$&
"
)
d
x
+
$+
2
&$
p(x /
"
$
)
d
x
+
2
$&
R2
Corso di Riconoscimento di Forme a.a. 2006/07
)]+
)]+
p(x /
R1
R1
Fondamenti di Teoria della Decisione
58
Prof. Ing. F. Roli
Nelle applicazioni le specifiche di progetto sono spesso del tipo: minimizzare la
probabilità di errore con P(rigetto) minore of uguale a “r” (es. errore<1% con
rigetto<15%)
Questi requisiti possono essere soddisfatti dalla regola di decisione, con
opzione di rigetto, di Chow (C.K. Chow, 1957, 1970):
i
Si parla di compromesso errore-rigetto (error-reject trade-off)
Il compromesso è anche chiaro da P(corretto)=1-P(rigetto)-P(errore)
Praticamente questo significa che posso ridurre l’errore aumentando il rigetto,
e viceversa. Come è ovvio intuitivamente.
Fondamenti di Teoria della Decisione
1
) + P ( r ig e tto , x
R0
se m ax P (
Da quest’ultima formulazione del rischio globale risulta chiaro che ogni valore
del rischio può essere ottenuto fissando il “rigetto” o l’“errore”, e facendo variare
l’altra quantità
Corso di Riconoscimento di Forme a.a. 2006/07
1
Compromesso errore-rigetto e regola di Chow
E quindi, dall’equazione precedente:
R=
[ P ( r ig e tto , x
e
c=0)
Applicando il criterio del minimo rischio si avranno tre regioni di decisione:
R0 = x
r
Prof. Ing. F. Roli
59
i
/ x) / T
altrim enti rigetta x
con T =
e
r
e
c
x
i
•T è la soglia di rigetto
•T varia fra 0 e 1perchè
c
'
r
•Per T=0 ( e= r) ho la classica regola
MAP
Si dimostra (C.K. Chow, 1957) che questa regola di decisione minimizza l’errore
(o massimizza l’accuratezza) per ogni ogni valore della probabilità di rigetto
Intuitivamente si capisce che la regola di Chow minimizza l’errore rigettando i
pattern la cui classificazione non è abbastanza “affidabile”
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
60
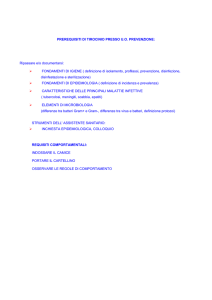
Esempio di uso regola di Chow
Esempi compromesso errore-rigetto
Errore
P( 1|x)
•Curva ideale
P( 2|x)
•Al crescere della soglia T cresce
il rigetto e diminuisce l’errore
(compromesso errore-rigetto)
T
Rigetto
x
R
R0
1
R2
Esempi
di
compromesso
accuratezza-rigetto per diversi
algoritmi di riconoscimento di
caratteri (OCR)
•Due classi Gaussiane
•Soglia di rigetto T definisce la regione di rigetto R0
•L’esempio fa capire che si può ridurre a zero l’errore pur di aumentare la soglia T
fino a che la regione R0 non contiene tutti i pattern errati. Cioè rigetto tutti gli errori
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
61
Corso di Riconoscimento di Forme a.a. 2006/07
Funzioni discriminanti e superfici/regioni di decisione
x
i
R( i | x) < R(
j
i
| x) i j, i=1,...,c
i
•Per il caso generale possiamo porre gi(x)=-R( i|x) ; la massima
funzione discriminante corrisponde al minimo rischio.
•Per il caso ad errore minimo: gi(x)=P(
1/x)
•In particolare per la classificazione a minimo errore le seguenti
scelte sono equivalenti:
g i ( x) = P (
i
x) =
p(x
p(x
g i ( x) = p ( x
i
g i ( x) = ln ( p ( x
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
63
Corso di Riconoscimento di Forme a.a. 2006/07
) P(
i
i
) P(
i
)
c
j =1
se
Corso di Riconoscimento di Forme a.a. 2006/07
62
•La scelta di gi(x) non è univoca; possiamo sostituire ogni gi(x)
con f(gi(x)), dove f( ) è una funzione monotona crescente.
•Un modo alternativo di
rappresentare i classificatori è
basato sull’uso di un insieme
di funzioni discriminanti
gi(x), i=1,..,c.
•Assegnamo x alla classe
gi(x)> gj(x) per ogni j i
Prof. Ing. F. Roli
Funzioni discriminanti e superfici/regioni di decisione
Allo stato attuale un “classificatore” è per noi una “macchina” che prende in
ingresso il pattern x e lo classifica secondo l’algoritmo del minimo rischio:
x
Fondamenti di Teoria della Decisione
i
j
) P(
i
))
)
) ) + ln (P (
Fondamenti di Teoria della Decisione
j
)
Prof. Ing. F. Roli
64
Funzioni discriminanti e superfici/regioni di decisione
•Nel caso di due sole classi è possibile definire un’unica funzione
discriminante g(x)5 g1(x)- g2(x)
•Le funzioni discriminanti
dividono lo spazio delle
“feature” in c regioni di
decisione R1 … Rc.
•Se g(x)>0 si decide per
•I confini di separazione fra le
regioni (“decision boundaries”)
sono definiti dall’equazione
gi(x)=gj(x) fra le due funzioni
discriminati a valore massimo
g ( x) = P (
g (x) = ln
•Esempio in due dimensioni, due classi con distribuzioni Gaussiane delle classi. Le
superfici di decisione sono iperboli. La regione R2 non è semplicemente connessa.
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
65
Principali fonti bibliografiche
Capitoli 2.1, 2.2, 2.3, 2.4, 2.5, 2.6, del libro Pattern Classification, di R. O. Duda,
P. E. Hart, e D. G. Stork, John Wiley & Sons, 2000
Cap. 1 del libro Statistical Pattern Recognition di Andrew Webb, John Wiley &
Sons, 2002
C.K. Chow, On optimum error and reject trade-off, IEEE Trans. on Information
Theory 16 (1970) 41-46
Fonti varie rielaborate dal docente
Corso di Riconoscimento di Forme a.a. 2006/07
1,
altrimenti per
2
•Fra le varie forme in cui possiamo esprimere la g(x), per un
problema a due classi le seguenti sono le più convenenti:
•Se gi(x)> gj(x) per ogni j i,
allora x Ri, e viene assegnato
alla classe i.
Corso di Riconoscimento di Forme a.a. 2006/07
Funzione discriminante per due classi
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
67
1
x) P (
p(x
p (x
2
x)
)
P(
+ ln
P(
2)
1
)
2)
1
•Un classificatore che lavora su un problema a due classi viene
anche detto classificatore dicotomico
Corso di Riconoscimento di Forme a.a. 2006/07
Fondamenti di Teoria della Decisione
Prof. Ing. F. Roli
66