I sistemi di riferimento
In topografia la necessità di utilizzare un sistema di riferimento (SdR) deriva dal fatto di dover
collocare un rilievo all’interno di un contesto nazionale, continentale o globale per produrre
cartografia.
Un corpo rigido nello spazio ha sei gradi di libertà per cui è compiutamente definito quando si
conoscono ad esempio le coordinate di un suo punto e di tre direzioni angolari verso un altro punto,
rispetto ad un sistema di riferimento.
Prescindendo da deformazioni, si può definire un sistema di riferimento come una terna di assi
orientata, posta in un punto convenzionale e dai quali si può univocamente conoscere la posizione
di altri punti stabili nel tempo attraverso la misura di tre grandezze, cartesiane od angolari.
Il topografo deve poterne conoscere una sua materializzazione in prossimità del rilievo da eseguire
per poterlo utilizzare con la strumentazione.
Scelta del sistema di riferimento
Come collocare e orientare un sistema di riferimento è molto importante per poi poter passare tra
differenti sistemi (nel cambiare sistema di riferimento si fa l’ipotesi che il corpo sia “rigido” e cioè
che la reciproca distanza di due suoi punti non cambi nel tempo, cosa che vedremo, data la sempre
più raffinata misurazione tra punti della crosta terrestre, non è poi sempre così scontata).
Per collocare l’origine degli assi si potrebbe definire un centro geometrico ed un’orientazione
locale, tuttavia, per collegare rilievi su tutta la superficie terrestre è più comodo utilizzare una terna
collocata nel centro della Terra.
Allo scopo si può decidere di utilizzare come origine il centro di massa che è un punto sempre poco
noto ma con gli anni meglio definibile, grazie ai satelliti che si spostano lungo le loro orbite in
funzione del campo di gravità terrestre.
L’orientamento dell’asse Z del nostro sistema di riferimento, può coincidere con l’asse di rotazione
terrestre. Ma il polo astronomico varia negli anni quindi per superare questo problema si può
scegliere un orientamento in direzione di un polo medio misurato per un certo periodo di anni
attraverso tecniche satellitari ed astronomiche.
Uno dei due assi posti nel piano equatoriale (che costituiscono così una terna cartesiana ortogonale),
formerà con l’asse Z un piano passante convenzionalmente per Greenwich.
Ogni sistema di riferimento (mondiale, europeo o nazionale) è legato all’epoca in cui sono state
effettuate le misure, infatti nel nome è riportata la data: ROMA40, GRS67, GRS80, WGS84,
ETRF89, PZ90, IGM95, ITRF2000 ecc..
Il più recente è stato calcolato dallo IERS (Intertional Earth Rotation and Reference System
Service) nel 2010 e prende il nome di ITRS2008 (International Terrestrial Reference System 2008
le misure fatte arrivavano sino al 2008).
La materializzazione fisica sul terreno dei sistemi di riferimento avviene mediante cippi, capisaldi,
chiodi o semplicemente con stazioni permanenti GNSS (Global Navigation Satellite System).
La materializzazione è legata all’epoca in cui fisicamente si appongono i capisaldi che tuttavia, a
causa dei moti della crosta terrestre oppure ai terremoti, frane o altri eventi, subiscono degli
spostamenti nel tempo.
Tutti i sistemi di riferimento globali si vorrebbero e si autodefiniscono geocentrici, ma le nuove e
migliori misure che si hanno con il passare degli anni, inducono ad adottare parametri ellissoidici
differenti che hanno bisogno di ricalcolare dei punti del vecchio sistema con formule di
rototraslazione spaziale, e spesso anche dei fattori di scala.
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Fornire delle coordinate relative di un punto rispetto all’altro in una terna cartesiana geocentrica è
molto scomodo per capire se l’ultimo punto si trova più a nord, a sud, a est od a ovest del primo.
L’ingegnere è abituato a riferirsi ad una superficie per rappresentare la planimetria ed
eventualmente ad una differente superficie per l’altimetria. È certo più intuitivo indicare di un punto
la latitudine e la longitudine, (ed eventualmente altezza ortometrica) piuttosto che tre coordinate
riferite al centro di massa della Terra.
Allo scopo, associato ad ogni sistema di riferimento è connessa la superficie di un ellissoide di
rotazione (la sezione equatoriale è una circonferenza) che rappresenta una forma media della Terra
molto prossima a quella fisica.
Ogni sistema di riferimento è noto attraverso quattro costanti, due di queste definiscono la forma e
le dimensioni dell’ellissoide di rotazione associato, le altre due servono per calcolare la variazione
del campo gravitazionale (costante gravitazionale geocentrica e velocità di rotazione angolare).
I più noti sistemi di riferimento globali hanno associato un ellissoide di rotazione con questi
parametri:
GRS 67
GRS 80
WGS 84
a = 6378160 m
a = 6378137 m
a = 6378137 m
s = 1/298,247167427
s =1/298,257222101
s = 1/298,257223563
ω rad= 7,2921151467×10 5 rad/s
ω rad= 7,2921150000×10 5 rad/s
−
−
a = semiasse equatoriale
s = schiacciamento
ω = velocità angolare responsabile del potenziale “normale”
Vanno infine citati anche i sistemi di riferimento locali, intendendo con ciò che il centro
dell’ellissoide non coincide con il centro di massa della Terra ma vi è un orientamento
dell’ellissoide in un punto preciso, ove si fa coincidere la verticale con la normale all’ellissoide.
Il più noto sistema di riferimento locale italiano è il sistema ROMA40 che utilizza l’ellissoide di
Hayford orientato a Monte Mario, i cui parametri sono:
a = 6378388 m
s =1/297
I più moderni sistemi di riferimento globali hanno sigle quali ITRSXXXX che vanno associati al
loro “frame di materializzazione ITRFXXXX. Con XXXX si indica l’anno di riferimento (la
validità ovviamente si estende oltre a tale anno).
Insieme ai sistemi globali si utilizzano sistemi di riferimento che meglio si adattano localmente a
realtà continentali, nel nostro caso sistemi di riferimento europei (la cui sigla inizia per E).
Sono ormai obsoleti i sistemi di riferimento nazionali (italiani), anche se è necessario che se ne parli
perché gran parte della cartografia italiana è stata costruita in questi sistemi di riferimento ed è
ancora disponibile presso i vari Enti cartografici dello Stato italiano (IGM, Regioni, Catasto ecc.).
Ogni continente ha un sistema di riferimento diverso in quanto se si analizzano alcune stazioni
“permanenti GNSS” europee (che sono stazioni che costantemente forniscono i propri dati a tutta la
comunità scientifica mondiale), è possibile calcolare la loro posizione relativa negli anni, in tal
modo si possono trovare con continuità quali sono i loro spostamenti rispetto ad un sistema i
riferimento globale. Si osserva che questi spostamenti nell’arco di un decennio non sono per nulla
trascurabili.
Ad esempio la stazione di Matera (MATE) ha uno spostamento nel sistema di riferimento mondiale
ITRS86 di 3 cm all’anno che vuol dire in 10 anni 30 cm. Se dovessimo adottare un sistema di
riferimento globale anche per l’Italia dovremmo prevedere un rifacimento delle cartografie a grande
scala almeno ogni 20 anni.
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Se si analizza tuttavia lo spostamento di Matera, riferito a punti di controllo situati nel continente
europeo, si troverebbero spostamenti ben minori, dell’ordine di 8 mm all’anno.
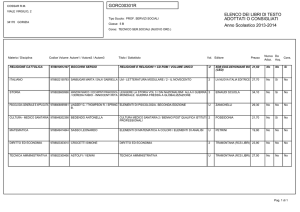
Stazione
GRAS
MEDI
NOTO
CAGL
MATE
VENE
ZIMM
VX
(m/anno)
− 0,0120
− 0,0142
− 0,0163
− 0,0070
− 0,0189
− 0,0153
− 0,0111
ITRF86
VY (m/anno)
VZ (m/anno)
+ 0,0189
+ 0,0214
+ 0,0188
+ 0,0127
+ 0,0192
+ 0,0136
+ 0,0173
+ 0,0106
+ 0,0118
+ 0,0157
+ 0,0079
+ 0,0136
+ 0,0140
+ 0,0126
VX
(m/anno)
+ 0,0006
− 0,0065
− 0,0105
+ 0,0036
− 0,0083
− 0,0001
− 0,0017
ETRF89
VY (m/anno)
VZ (m/anno)
+ 0,0021
+ 0,0001
− 0,0032
+ 0,0000
+ 0,0000
+ 0,0001
+ 0,0021
− 0,0030
− 0,0011
+ 0,0022
+ 0,0041
+ 0,0019
+ 0,0001
+ 0,0022
Velocità medie annuali di alcune stazioni permanenti nei sistemi ITRF (Internazionale o globale) ed
ETRF (Europeo)
Questo risultato è valido con maggiore o minore precisione anche per tutte le altre stazioni di
controllo del continente europeo e indica un moto relativo continentale grossomodo autonomo. La
stesa constatazione è verificabile all’incirca anche per gli altri continenti.
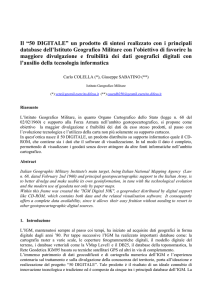
Da qui l’idea di dotare l’Europa di un proprio sistema di riferimento che, pur connesso al sistema di
riferimento globale, permetta di non aggiornare la cartografia con elevata frequenza.
Fig. 1) Stazioni permanenti della rete europea EUREF che materializzano il sistema di riferimento ETRS
I sistemi di riferimento italiani
Prima dell’unità d’Italia esistevano tanti sistemi di riferimento, materializzati da reti costruite per
triangolazioni ma avevano basi e stazioni di emanazioni differenti con precisioni differenti.
Nel 1863 la Commissione Geodetica Italiana (C.G.I.) decise un rifacimento ex novo della
triangolazione nazionale e nei 40 anni successivi, sino al 1902, vennero eseguiti i lavori di
campagna per la creazione di una rete continua e di uniforme precisione. I risultati condussero ad
una rete con un errore medio delle osservazioni che rimaneva attorno a 0,7 secondi sessagesimali.
Nei 16 anni seguenti venne portata a termine l’operazione di calcolo e compensazione; in un primo
tempo venne compensata la rete a Nord di Roma e quella sarda, in seguito si giunse alla
pubblicazione dei dati che riguardavano il nord Italia (1908).
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
L’Italia settentrionale venne divisa in tre reti parziali, ciascuna dipendente da una base e nel
calcolare le lunghezze dei lati compensati, con riferimento alle basi di Udine, Somma Lombardo e
Piombino, ci si ritrovò sui punti di riattacco con un’ovvia discordanza di lati di confine. Venne
condotto quindi un calcolo di una triangolazione intermedia che funzionasse da riattacco tra le tre
triangolazioni che si pensavano differenti per disomogeneità delle basi e venne eseguito un calcolo
semplificato della somma delle tre reti,.
Il calcolo venne eseguito utilizzando l’ellissoide di Bessel ( a = 6377397 m α =1/ 299,1) orientato a
Genova con i seguenti valori astronomici (del pilastrino dell’osservatorio)
ϕ = 44° 23’ 08”,235
λ = 0°
α = 117° 31’ 08”,91con direzione riferita all’azimuth della geodetica Genova – Monte Telegrafo
Ricordiamo che “orientare” un ellissoide significa imporre un “contatto” in un punto tra le
coordinate geografiche ricavabili con osservazioni astronomiche e quelle ellissoidiche, ed un
azimuth astronomico identico ad un azimuth ellissoidico. Per quel punto “di emanazione” si avrà:
⎧Φ = ϕ
⎪
⎨Λ = λ
⎪ H = h N = 0
(
)
⎩
In cui, con le lettere (ϕ, λ) si è indicata la latitudine e longitudine geografica, mentre con (Φ, Λ) si
indica la latitudine e longitudine astronomiche. La lettera h verrà utilizzata per indicare l’altezza
ellissoidica, H sarà la quota ortometrica ed N l’ondulazione del geoide.
Fig. 2) La rete geodetica italiana e la sua compensazione “a blocchi”
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Successivamente venne eseguito il calcolo di raccordo con la rete sarda.
Nel 1910 venne affrontato il problema della compensazione della rete a Sud di Roma, suddivisa in
quattro sottoreti, dimensionate sulle basi di Foggia, Lecce, Crati e Catania.
Nel calcolo si introdussero anche le importanti equazioni di condizione sul riattacco laterale per
ciascuna base, evitando gli errori introdotti nella precedente compensazione delle tre reti a Nord,
pur mantenendo il riferimento al precedente ellissoide. Tuttavia si trascurarono le correzioni sui lati
di confine con le reti settentrionali, propagando gli errori residui delle reti settentrionali a quelle
meridionali.
Alla fine del 1936 vennero conclusi i lavori integrativi della rete altoatesina, saldando le basi di
Udine e Somma Lombardo.
Il 30 Novembre del 1940, la C.G.I, decise di adottare come superficie di riferimento l’ellissoide di
Hayford che venne orientato sul vertice di I^ ordine Roma Monte Mario coi seguenti valori
astronomici:
ϕ = 42° 55’ 25”,51
λ = (12° 27’ 08”,40 ad Est di Greenwich)
α = 6° 35’ 00”,88 tra Monte Mario e Monte Soratte
A partire dal 1947, a guerra finita, utilizzando apposite tavole e studi del prof. Boaga, i calcoli di
tutta la rete nazionale furono condotti sul piano della rappresentazione conforme di Gauss.
Ci si rese presto conto delle necessità di una rete italiana che “colloquiasse” con i vertici della rete
europea che si era definita in quegli anni anche per le altre nazioni europee.
Si pensò quindi di inserire la rete italiana all’interno di una più vasta rete europea e , con l'ED50 si
adottò finalmente un sistema europeo. I lavori preparatori richiesero una compensazione di serie di
triangoli disposti a catena che interessa tutta l’Europa e in parte l’Africa settentrionale (vedi fig.3).
Fig. 3) Rete europea utilizzata per rendere omogenei i vertici europei negli anni ‘50
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
L’ED50 è un sistema che ha consentito di rendere omogenea la cartografia a piccola e media scala a
livello europeo. L’ellissoide è quello internazionale (o di Hayford) con orientamento medio europeo
a Posdam (Germania); l’origine delle longitudini è Greenwich.
A questo sistema è associata la rappresentazione cartografica UTM (UTM-ED50) disegnando sulla
cartografia italiana, un doppio reticolato.Per il passaggio tra i due diversi insiemi di coordinate
(planimetriche) che differiscono:
• per diversi parametri della proiezione (sempre Gauss, ma false origini diverse)
• diverso datum (stesso ellissoide ma orientato diversamente)
• diversa compensazione delle reti che materializzano il datum,
si utilizzano espressioni approssimanti (polinomi) valide in ambito locale che tuttavia non
differiscono molto da rototraslazioni con variazione di scala.
A poco prima degli anni 60 si può collocare l’avvento dei distanziometri ad onde e in quegli anni
venne realizzata anche la misura di una nuova base di Piombino con fili di invar che consentì di
apportare delle correzioni alle coordinate dei punti.
Gli anni successivi al 1960 segnarono l’impegno dell’IGM nella misura dei lati vicini a quelli delle
triangolazioni di altri Stati e la determinazione con geodimetri di numerosi lati e la misura di
azimuth di Laplace.
Finalmente, nel 1983,con l’avvento dei computer e di programmi di compensazione, il prof. Bencini
realizzò una compensazione rigorosa in un unico blocco della rete fondamentale.
Il calcolo ha dato origine ad un nuovo sistema di coordinate denominato IGM83, in cui ellissoide e
punto di emanazione sono rimasti fissi. Purtroppo non furono mai adottate le coordinate ricavate da
questa compensazione.
Fig. 4) La rete geodetica italiana IGM83, realizzata attraverso triangolazioni e trilaterazioni
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
La ridondanza di tale calcolo è più del doppio (2,2) rispetto alla precedente rete di triangolazione.
La dimensione delle maglie è di circa 40 km. Per il calcolo delle coordinate piane dei vertici
trigonometrici è stata conservata la rappresentazione di Gauss utilizzando tre fusi, il fuso Ovest,il
fuso Est ed un fuso ausiliario.
La rete trigonometrica “classica”, realizzata per triangolazione e in seguito per metodi misti di
triangolazione trilaterazione e misure di azimuth di Laplace constava alla fine del 1980 di circa
20000 vertici trigonometrici suddivisi in quattro ordini ed uniformemente distribuiti sul territorio
nazionale.
La rete IGM83 è poi stata ricompensata nel 1989, aggiungendo alle misure già fatte anche misure
distanziometriche ottenute con l’uso di distanziometri ad onde ma i risultati della compensazione,
hanno avuto una vita breve con l’avvento di strumentazione basata sul GPS.
La Rete IGM95
L’adozione del Sistema Globale alla metà degli anni ’90 fu una scelta obbligata se si volevano
sfruttare le gradi potenzialità offerte dai sistemi di posizionamento satellitare.
Infatti dal 1989 sino al 1995 vennero misurati con strumentazione GPS circa 2000 punti della rete
fondamentale IGM in prossimità di vertici di ordine elevato e molti altri più punti di reti di
infittimento arrivando nel 2005 ad avere una rete con una densità di circa un punto ogni 5 km.
I punti scelti sono stazionabili con ricevitori GPS, per cui dalla vecchia rete trigonometrica sono
stati eliminati, ad esempio, i punti posti su campanili.
La rete così formata prese il nome di rete IGM95, e rappresentava la materializzazione italiana del
sistema di riferimento ETRS89 in cui l’ellissoide è sempre il WGS84, (per la precisione, orientato
in modo leggermente diverso).
Si è fatta coincidere la rete europea ETRF con quella internazionale ITRF per un preciso istante
cioè per l’anno 1989, da quella data in poi si è assunta per l’Europa una velocità media nulla mentre
in realtà nel sistema assoluto il blocco europeo ed euroasiatico aveva velocità diversa da zero nel
sistema ITRS
Fig. 5) I vertici della rete IGM95 (a sinistra), ed una monografia di uno dei vertici, completa di
documentazione fotografica (a destra)
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Questa rete è senza dubbio più precisa della rete trigonometrica tradizionale, ma occorre sempre
tener conto che in 22 anni sono avvenute deformazioni valutabili con altre misure GPS, oltretutto
più precise per l’affinamento di strumenti e metodi.
Per questa rete l’IGM scelse di appoggiarsi al sistema di riferimento europeo ETRS, scelta che
permise di rimuovere le deformazioni medie della placca, ma non le deformazioni della nostra
penisola.
A queste deformazioni vanno aggiunte quelle locali, legate ad eventi rari. Ad esempio, a seguito del
terremoto dell’Aquila del 2009, le stazioni permanenti attorno all’area interessata si sono spostate di
più di 20 centimetri.
A causa delle deformazioni locali e puntuali cui è soggetto il territorio, occorrerebbe controllare ed
aggiornare la posizione di questi vertici con una certa frequenza, con un conseguente aumento dei
costi ed un continuo aggiornamento delle cartografie esistenti.
L’ideale è quindi quello di poter disporre di una rete non statica (come erano le precedenti reti
dell’IGM), ma dinamica, (sempre in ricalcalo) che si estenda su tutto il territorio nazionale
utilizzando come “centrini” del sistema di riferimento, le stazioni permanenti GPS, analogamente a
quanto già fatto per il sistema di riferimento globale (IERS) e per quello europeo (EUREF).
Fig. 6) I movimenti del blocco euroasiatico negli anni e la loro cristallizzazione nel sistema
ETRF2000 per l’Europa
Si tratta quindi di avere a disposizione una rete di vertici che mantenga il sistema di riferimento in
tempo reale e che rilevi la dinamica della crosta terrestre, mantenendosi direttamente connessa sia al
sistema di riferimento europeo che al sistema di riferimento globale.
A questo punto l’IGM giunse all’idea di superare i problemi correlati alle reti statiche dotandosi di
un nuovo sistema di riferimento dinamico, connesso al sistema di riferimento europeo (ETRF2000)
e mondiale.
Le fasi di creazione di questo nuovo sistema sono state due:
- il passaggio da un sistema globale IERS ad un sistema europeo ad una precisa data
- convertire la precedente rete IGM95 a quella dinamica europea adottata.
La Rete Dinamica Nazionale
La Rete Dinamica Nazionale1 (RDN) è costituita da una serie di stazioni permanenti GPS
stabilmente materializzate, che ricevono con continuità i segnali satellitari GNSS e li trasmettono in
1
Si veda: L. Baroni, F. Cauli, D. Donatelli, G. Farolfi, R. Maseroli,
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
tempo reale ad un Centro di Calcolo presso il Servizio Geodetico dell’IGM. Queste osservazioni
sono necessarie per lo studio dei movimenti crostali sia a livello nazionale che locale.
L’esigenza è quella di dotare la nazione di un Riferimento Geodetico atto a supportare qualunque
attività geodetica e quindi anche quelle che richiedono le precisioni più elevate.
L’utilizzo delle stazioni permanenti GPS che costituiscono la RDN ha altresì lo scopo di distribuire
le correzioni per il posizionamento in tempo reale (RTK), metodologia che necessita di riferimenti
dotati di alte precisioni, non raggiunte dalla realizzazione dell’ETRF89.
Come riferimento temporale è stato scelto il 2008.0 (secondo le direttive EUREF).
I calcoli necessari alla definizione della posizione delle stazioni della RDN sono stati svolti dal
Servizio Geodetico dell’IGM, utilizzando il software BERNESE.
La RDN è stata costituita selezionando 99 stazioni permanenti GPS (fra quelle già esistenti in Italia)
omogeneamente distribuite, con una interdistanza media di 100 ÷ 150 km ed che in modo da
consentirne l’accesso su tutto il territorio nazionale; sono incluse, di diritto, tutte le otto stazioni
italiane già calcolate nei sistemi internazionali ITRS e IGS (Matera, Noto, Medicina, Padova,
Torino, Genova, Cagliari e Lampedusa).
Sono state inoltre incluse nella RDN le stazioni ITRS di Sofia, Graz, Wettzel, Zimmerwald e Grasse
situate al di fuori del territorio nazionale e anche altre stazioni appartenenti alle reti che forniscono
le correzioni per il posizionamento in tempo reale, in modo da facilitare il loro successivo
allineamento al Riferimento Ufficiale Nazionale.
I dati utilizzati provengono da osservazioni relative a 4 settimane GPS: 1459, 1460, 1461 e 1462
(28 giorni complessivi dal 23/12/2007 al 19/01/2008 compresi) scaricati in formato RINEX a 30”.
Fig. 7) Le basi calcolate nel giorno 10 gennaio 2008
Servizio Geodetico - Istituto Geografico Militare - Firenze “ La Rete Dinamica Nazionale nel passaggio al nuovo
sistema di riferimento ETRS2000”
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
La conversione da IGM95 a RDN
Per poter convertire i punti della vecchia rete in quelli della Rete Dinamica Nazionale (RDN),
occorreva organizzare una raccolta di dati, possibilmente in maniera automatica, di un certo numero
di stazioni permanenti storicamente stabili ed affidabili.
La raccolta dei dati ha interessato 45 stazioni permanenti collegate in modo da avere una omogenea
distribuzione sul territorio, con particolare riguardo alle zone marginali al fine di contenere la
propagazione degli errori.
Ciascuna delle 45 stazioni è stata collegata a non meno di 3 punti IGM95 limitrofi misurando
altrettante baseline GPS.
La stabilità dei punti IGM95 utilizzati per il riattacco è stata verificata chiudendo i poligoni
costituiti dalle basi misurate in aggiunta a quelle d’impianto; tale controllo ha consentito anche di
verificare la possibilità di mantenere buone precisioni utilizzando congiuntamente basi misurate in
tempi diversi.
Unendo quindi le nuove basi di collegamento alla compensazione d’impianto, e fissando le 45
stazioni permanenti, utilizzando il software GEOLAB, è stata ricalcolata ai minimi quadrati l’intera
rete IGM95.
Successivamente sono stati ricalcolati tutti i successivi raffittimenti della rete, fino alla totalità degli
oltre 4000 punti IGM95 fino ad oggi realizzati.
Il passaggio tra i vari sistemi
La transizione fra i sistemi ETRF89 ed ETRF2000 non deriva da una semplice trasformazione
geometrica ma può essere calcolata quando vi siano sufficienti misure che legano alcuni (o molti
punti) nei due sistemi
In passato i metodi adottati utilizzavano costanti additive di longitudine e latitudine o metodi grafici
con linee isotransitive, oppure rototraslazioni con variazioni di scala, che però non permettevano di
scindere il problema planimetrico da quello altimetrico; alla fine si è seguita la strada di adottare
algoritmi polinomiali.
Il metodo attualmente adottato dall’I.G.M. si basa su matrici di differenze di coordinate, dette
grigliati, che derivano da un confronto fra le coordinate nei due sistemi di tutta la rete e che hanno
consentito il passaggio fra i Sistemi ETRF89 ed ETRF2000.
Le griglie sono state calcolate a partire dalle differenze Δϕ e Δλ di tutti i punti creando, per mezzo
di un algoritmo “pseudo-interpolatore”, una superficie approssimante secondo il principio della
minima curvatura, disponibile nel software Surfer®.
Applicando l’algoritmo di approssimazione del software Surfer®, e partendo da matrici
spazialmente irregolari delle differenze, sono stati generati tre grigliati spazialmente regolari, uno
per la latitudine, uno per la longitudine e uno per la quota, che rappresentano le rispettive superfici
interpolanti.
L’IGM ha valutato queste deformazioni su tutta Italia e le ha calcolate su griglie molto fitte, con
passo sempre inferiore a 10 secondi sessagesimali. Applicando tali valori deformativi, contenuti in
griglie che hanno l’estensione dei fogli in scala 1:50000, si può recuperare la vecchia cartografia e
riportarla nel sistema di riferimento europeo.
Le 3 griglie così calcolate sono state implementate nei software della serie Verto® , consentendo
la realizzazione di versioni aggiornate che includono anche il nuovo sistema ETRF2000.
In particolare le 3 versioni di Verto® fino ad ora in cessione sono state aggiornate, rispettivamente:
la versione: Verto2+
nella versione:
Verto2k
la versione: Verto2mila nella versione:
Verto2ks
la versione: Verto3
nella versione:
Verto3k
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
I grigliati disponibili sono:
- GR1 conversione tra i sistemi ROMA40 – ED50 – ETRF89 geoide Italgeo 99
- GR2 conversione tra i sistemi ROMA40 – ED50 – ETRF89 geoide Italgeo 2005
- GK1 conversione tra i sistemi ROMA40 – ED50 – ETRF89 – ETRF2000 geoide Italgeo99
- GK2 conversione tra i sistemi ROMA40 – ED50 – ETRF89 – ETRF2000 geoide Italgeo2005
Fig. 8) Grigliati italiani di trasformazione planimetrica e passo tra i grigliati
Essendo la procedura approssimata, lascia residui di piccola entità sui punti noti (il 99% dei residui
è inferiore ad 1 centimetro in planimetria, inferiore a 2 centimetri in quota).
Data la piccola entità di tali residui, inferiori agli e.q.m. tipici dei punti IGM95, si è deciso di
modificare le coordinate ETRF2000 della rete IGM95 accordandole con i risultati della griglia, in
modo tale da non avere residui.
Le monografie dei punti IGM95 con coordinate nel sistema ETRF89 (fino ad ora impropriamente
chiamato WGS84) sono state aggiornate dal Servizio Geodetico nel ETRF2000.
Anche per quanto concerne la cartografia catastale espressa nel sistema Cassini-Soldner oppure
dell’IGM espressa nei vecchi sistemi di riferimento il passaggio tra due sistemi di riferimento non è
possibile con una formula empirica chiusa.
Generalmente si effettua il passaggio dai sistemi più vecchi a quelli più recenti sino al sistema
ETRF89, in cui il grosso della trasformazione è sicuramente assorbito da una rototraslazione, ma vi
sono deformazioni non isotrope non compensabili con un singolo fattore di scala2; dopo, attraverso
il software Verto® , nella varie versioni o attraverso il software Cartlab® del prof. Virgilio Cima od
altri che stanno per nascere, in genere prodotti da enti cartografici regionali, si esegue il passaggio,
con l’uso dei grigliati all’attuale sistema ETRF2000.
2
Vedasi A.Cina,F.Ferrante, M.Piras, C. Porporato: “La trasformazione del DATUM catastale ai DATUM Roma40 e
ETRF2000” - Rivista dell’Agenzia dl Territorio n.1/2012
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Fig.9) Maschera iniziale del SW CartLab3®
Fig.10) Output del SW CartLab3®
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Fig.11) Output del SW Verto3K®
Alla fine del febbraio 2012 è stato pubblicato un provvedimento in Gazzetta Ufficiale con il quale
l’Italia ha adottato il nuovo sistema di riferimento denominato ETRF2000 (2008.0).
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education