Momento di una forza, equilibrio di un corpo rigido, macchine semplici
v.2 - giugno 2016
1
Momento di una forza. Coppia di forze
F
F
O
b
b
−F
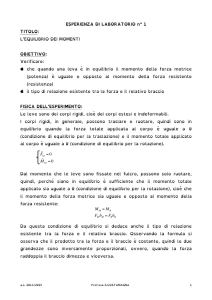
Figura 1: Braccio del momento di una forza (sin); coppia di forze (destra)
Si definisce il momento di una forza M rispetto a un punto (polo) il prodotto del modulo della forza F per il
braccio b, dove quest’ultimo è definito come la distanza del punto (polo) dalla retta di azione della forza.
M =F ·b
L’unità di misura del momento è il Newton per metro (N ·m). Il momento ha segno positivo se imprime una rotazione
in senso antiorario, negativo se imprime una rotazione in senso orario. Il momento risultante rispetto a un punto si
ottiene sommando algebricamente tutti i momenti esercitati dalle forze in gioco.
Quando abbiamo due forze di uguale modulo F ma verso opposto, separate da una certa distanza b, si parla di
coppia di forze. La distanza b tra le due rette d’azione è detto braccio della coppia, e il momento della coppia di
forze , rispetto a un qualsiasi punto O, è: M = F · b.
2
Equilibrio di un corpo rigido.
Un oggetto, esteso nelle tre dimensioni dello spazio, è un corpo rigido quando esso è indeformabile. Ciò si verifica
se, per ogni coppia di punti appartenente all’oggetto, la loro distanza si mantiene costante.
Un corpo rigido è in equilibrio se non trasla e non ruota, e ciò accade se sono contemporaneamente nulli:
• la risultante di tutte le forze applicate al corpo, comprese le reazioni vincolari (eq. per traslazione):
F~1 + F~2 + F~3 + .... = 0
• il momento risultante dei momenti di tutte le forze applicate al corpo, calcolati rispetto a un punto qualunque
(eq. per rotazione):
MO1 + MO2 + MO3 + .... = 0
È importante notare che la somma delle forze è una somma vettoriale, di tutte e sole le forze agenti sull’oggetto. Per
quanto riguarda i momenti, va sottolineato che essi devono tutti essere calcolati rispetto allo stesso polo O.
1
3
Macchine semplici.
Una macchina semplice è uno strumento che permette di equilibrare una forza, detta forza resistente, con un’altra
forza, detta forza motrice. Il rapporto tra il modulo della forza resistente e il modulo della forza motrice è detto
guadagno:
FR
G=
FM
Se il guadagno è maggiore di 1 si dice che la macchina è vantaggiosa, se è minore di 1 si dice che la macchina è
svantaggiosa. Esempi di macchine semplici sono le leve e il piano inclinato.
3.1
Leve
La leva è costituita da un’asta rigida in grado di ruotare attorno a un punto fisso O detto fulcro. La condizione di
equilibrio della leva, che deriva dalla condizione di annullamento del momento risultante di un corpo rigido, è:
FR · bR = FM · bM
dove FR e FM sono rispettivamente forza resistente e motrice, e bR e bM sono i bracci della forza resistente e
motrice.
O
F
I genere
M
FR
R
FM
FM
II genere
F//
O
F
α
R
l
F
h
Fg
FR
III genere
O
α
FM
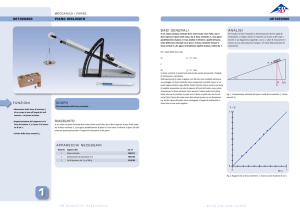
Figura 2: Leve di I, II e III genere (sin); piano inclinato (destra)
Le leve sono di tre tipi, esemplificati nella figura 2. La leva di secondo genere è sempre vantaggiosa (bM > bR
!), mentre la leva di terzo genere è sempre svantaggiosa (bM < bR !).
3.2
Piano inclinato
Il piano inclinato senza attrito può essere interpretato come una macchina semplice (vantaggiosa), dove la forza
resistente è costituita dalla forza peso dell’oggetto, e la forza motrice è la forza (parallela al piano inclinato )
necessaria a contrastare la componente parallela della forza peso. Una forza appena maggiore di questa è sufficiente
a far salire l’oggetto lungo il piano. Dall’analisi della scomposizione illustrata in figura 2, si ottiene:
FM = F// = Fg
h
l
√
Se α = 30◦ , h/l = 1/2 = 0, 5, mentre se α = 45◦ , h/l = 1/ 2 = 1/1, 41 = 0, 707.
2