caricato da
common.user20906
1 Barbieri Leonardo Elaborato Maturita

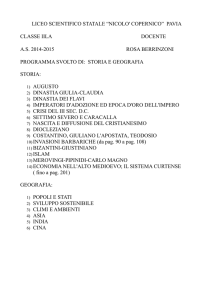
ISTITUTO D’ISTRUZIONE SUPERIORE "G.VERONESE – G. MARCONI" SEDE CENTRALE “G. VERONESE”: Via P. Togliatti, 833 - 30015 CHIOGGIA (VE) Indirizzi: liceo Scientifico – Scienze Applicate – Classico – Linguistico – Scienze Umane Tel. 041/5542997-5543371 – Fax 041/2436753 SEZIONE ASSOCIATA “G. MARCONI”: Via T. Serafin, 15 – 30014 CAVARZERE (VE) Indirizzi: Professionale Manutenzione e Assistenza Tecnica – IeFP (Meccanico) Tecnico Biotecnologie Sanitarie - Tecnico Elettrotecnica ed Elettronica (Elettrotecnica) Tecnico Biotecnologie Ambientali (serale) Tel. 0426/51151 – Fax 0426/310911 e-mail: [email protected] – C.F. 81002030278 - Cod. Min. VEIS00200G ------------------------------------------------------------------------------------------------------I.I.S. “Veronese-Marconi” Sede di Cavarzere (VE) RELAZIONE PERCORSO per le COMPETENZE TRASVERSALI e per l’ORIENTAMENTO (PCTO ex AS-L) TRIENNIO 2016/2019 Nome Cognome: Leonardo Barbieri Classe: 5E Indirizzo: Elettrotecnica ed elettronica Data di consegna: 31/05/2021 pag. 1 Sommario SISTEMI TRIFASE .......................................................................................................................................... 3 Che cos’è ................................................................................................................................................. 3 Le sue origini............................................................................................................................................ 3 Sistema trifase simmetrico ed equilibrato ................................................................................................ 5 Sistema e simmetrico e squilibrat............................................................................................................. 5 Esercizio................................................................................................................................................... 6 THE ASSEMBLY LINE ....................................................................................................................................10 What is ...................................................................................................................................................10 Who invented .........................................................................................................................................10 How it is organized..................................................................................................................................11 The first problems ...................................................................................................................................12 Automation ............................................................................................................................................12 Uso del PLC per l’inversione di marcia di un motore asincrono trifase .........................................................13 Che cos’è il PLC .......................................................................................................................................13 SCHEMA DI POTENZA (l’inversione di marcia di un motore asincrono trifase): .........................................14 SCHEMA DI COMANDO (l’inversione di marcia di un motore asincrono trifase): ......................................15 SCHEMA KOP ..........................................................................................................................................16 SCHEMA FUP ..........................................................................................................................................17 FUNZIONE BOOLEANA ............................................................................................................................19 AWL ........................................................................................................................................................20 DEFINIZIONE DI FUNZIONI ED INTEGRALI INDEFINITI ...................................................................................21 Definizione di funzione ...........................................................................................................................21 Classificazioni delle funzioni ....................................................................................................................22 Integrale indefinito .................................................................................................................................23 LA NASCITA DELL’ EDUCAZIONE FISICA IN ITALIA.........................................................................................25 Agli inizi dell’ottocento ...........................................................................................................................25 La nascita e lo sviluppo della prima società di ginnastica .........................................................................26 Periodo fascista ......................................................................................................................................27 pag. 2 SISTEMI TRIFASE Che cos’è Un sistema trifase, nell'elettrotecnica, indica un sistema combinato di 3 circuiti a corrente alternata (di produzione, distribuzione e utilizzo dell'energia elettrica). Esso è impiegato nell'industria, nelle officine e nelle grandi utenze dove la potenza in gioco è medio-alta e dove vengono impiegati i motori asincroni trifase. Nel sistema trifase sono presenti tre conduttori di fase oltre al neutro (quest'ultimo non è sempre richiesto). Il potenziale del neutro è sempre 0 Volt e tra questo e le fasi sono presenti tre tensioni con le seguenti caratteristiche: forma d'onda sinusoidale stessa frequenza stessa ampiezza sfasate tra loro di 120° Le ultime due condizioni sono vere solo nei sistemi simmetrici che comunque costituiscono la quasi totalità dei casi. Le sue origini Mikhail Osipovich Dolivo-Dobrovolsky fondatore dei sistemi elettrici polifase , sviluppò il generatore elettrico trifase e un motore elettrico trifase (1888) e studiò i collegamenti stella e triangolo . Il trionfo del sistema trifase fu mostrato in Europa all'Esposizione Elettrotecnica Internazionale del 1891. pag. 3 Con l’introduzione del trifase e il trasformatore si dimostrò, che la trasmissione di grandi potenze su grandi distanze è vantaggiosa sopratutto per le perdite di corrente durante l distribuzione, inizialmente le prime reti di distribuzione a scopo commerciale sono da attribuire a T. A. Edison, nel 1882 a Londra e New York, in corrente continua, i rendimenti di trasmissione di queste prime linee non superavano il 50%. In America, Westinghouse è il grande protagonista della nascita e sviluppo dell’alternata: acquista i brevetti europei per le macchine rotanti e ingaggia Tesla come consulente, insieme realizzeranno il primo motore ad induzione pronto per essere commercializzato. Alla fine del XIX secolo la comunità scientifica è divisa dal conflitto per la scelta fra corrente alternata e corrente continua: anche tramite scorrettezze e dispetti ciascuno schieramento cerca di far prevalere la propria idea. Alla fine è la corrente alternata a imporsi per la sua grande versatilità. La connessione per creare un sistema trifase può essere: a stella, se i tre generatori condividono un terminale, a triangolo, in caso contrario. Le tensioni stellate corrispondono alle tensioni dei tre generatori monofase che compongono il generatore trifase. pag. 4 Sistema trifase simmetrico ed equilibrato Nel caso di sistema trifase simmetrico ed equilibrato, i tre generatori monofase che costituiscono il generatore trifase sono isofrequenziali (cioè con la stessa frequenza) e le 2 loro fasi differiscono di 3 π radianti (120°) Sistema e simmetrico e squilibrat Invece quando si collegano tre impedenze non uguali tra loro a stella e poi ad un sistema simmetrico di tensioni si dice che il sistema e simmetrico e squilibrato. Per cui si ha rappresentazione vettoriale di questo genere: pag. 5 Esercizio PM1= 10 Kw cosϕM1= 0.8 Φm1=arcos 0.8 = 36.87° PM2= 100 Kw cosϕM2= 0.85 Φm2=arcos 0.85 = 31.79° 1. pag. 6 PM1= E1 (230)* I1(M1)* cosϕM1 3 ̅ (M1)= 10∗10 = 54.5 A 𝐼1 230∗0.8 I1(M1)= I1(M1) * e j(90°-ϕ1) = 54.5 * e j(90°-36.87°) = 54.5 e j 53,13 PM2= √3 * U * I * cosϕ I= 100∗103 𝑃𝑀2 √ = 3∗𝑈∗𝑐𝑜𝑠𝜙 √3∗400∗0.85 = 170 A ̅̅̅̅= 𝐸1 ̅̅̅̅ e j90° 𝐸1 ̅̅̅̅= 𝐸2 ̅̅̅̅ e j330° 𝐸2 ̅̅̅̅ 𝐸3= ̅̅̅̅ 𝐸3 e j210° ̅ (M2)= I1(M2) * e j(90°-ϕ1(M2)) = 170 * e j(90°-31.79°) = 170* e j 58,21 𝐼1 ̅ (M2)= 170 * e j(58.21°+ 120°) =170 e j 178.21 𝐼3 ̅ (M2)= 170 * e j(178.21° + 120°) = 170 e j 298.21 𝐼2 pag. 7 ̅̅̅̅̅= 𝐼1 ̅ (M1) + 𝐼1 ̅ (M2) = 54.5 𝑒 j(53.13°) + 170 𝑒 j(58.21°) = 𝐼𝐿1 54.5 (cos 53.13° + j sen 53.13°) + 170 (cos 58.21° + j sen 58.21°) = 54.5 (0.6 + j0.8) + 170 (0.53+ j 0.85)= 32.7 + j 43.6 + 90.1 + j 144.5 = 122.8 + j188.1 = 224.65 𝑒 j(58.86°) ̅̅̅̅̅ = 𝐼2 ̅ (M2)= 170 𝑒 j298.21 ° 𝐼𝐿2 ̅̅̅̅̅ = 𝐼3 ̅ (M2)= 170 𝑒 j178.21° 𝐼𝐿3 2. Φ1 = Φ E1 - ΦIL1 = 90° - 56.86° = 33.14° Φ2 = Φ E2 - ΦIL2 = 330° - 298.21° = 31.78° Φ3 = Φ E3 - ΦIL3 = 210° - 178.21° = 31.79° 3. P = PM1 + PM2 = 10 * 103 + 100 * 103 = 110 Kw QM1 = E1 * I1(M1) senΦM1 = 230 * 54.5 * sen 36.8 = 9.8 KVAR QM2 = √3 * U * I * senΦM2 = √3 * 400 * 170 * sen 31.79 = 62 KVAR Q = QM1 + QM2 = 9.8 *103 + 62 *103 = 71.8 KVAR pag. 8 S = √𝑃2 + 𝑄2 = √110 ∗ 103 + 71.8 ∗ 103 = 181.8 KVAR S = √3 * U * IL Corrente di linea IL = 5 √ = 3∗𝑈 181.8 ∗ 103 √3 ∗ 400 = 188 A METODO METODO DI DIFF. ANALITTICO BOUCHEROT IL1 224.65 188 +36.65 A IL2 170 188 -18 A IL3 170 188 -18 A 4. TgΦ = 𝑄 𝑃 = 71.8 ∗ 103 110 ∗ 103 = 0.65 Φ= 32.31° cosΦ = 0.85 METODO METODO DI DIFF. ANALITTICO BOUCHEROT Φ1 33.14° 32.31° +0.83 Φ2 31.79° 32.31° -0.52 Φ3 31.79° 33.31° -0.52 pag. 9 THE ASSEMBLY LINE What is An assembly line is a manufacturing process used in modern industries in the early 1900s, which intended to optimize the work of workers and reduce the time required for the assembly of a complex product. Who invented The American engineer Taylor was the first person to deal with this problem, for this reason it takes the name of Taylorism or the scientific organization of work. Frederick Winslow Taylor According to Taylor, it was necessary to break down as much as possible the production process of a given object. This allowed to: entrust to every worker the same job in equal times optimize the production time In addition, labour costs would decrease and wages would increase, but also production increased. The first forms of assembly line were born in the early 1800s, in the shipyards of the British Navy. pag. 10 It was not until 1913, however, that the assembly line became a standard procedure used in the civil manufacturing industry thanks to the American Henry Ford, owner of an automobile factory (Ford Motor Company), which perfected the assembly line method and adopted the principle of division of roles of workers, extending the use of conveyor belt. the first assembly lines for automobiles How it is organized An assembly line is generally made up of a conveyor belt, which flows carrying the different objects to be assembled to obtain the finished product. Each worker can assemble a single piece, through repetitive and mechanical movements, allowing a considerable saving in production time. Thanks to a team of engineers, Ford developed entire factories based on the concept of the assembly line. Ford achieved excellent results by prompting many other industries to copy his method, a new way of understanding serial production that took the name of Fordism. The first car built following this method was the Ford Model T. pag. 11 first model made with the assembly chain The first problems But this highly repetitive and mechanical way of working for the workers of the time, often caused discomfort of the psyche and motor disturbances. Ford received much criticism for the problems that the new production methods he used produced in his employees, and for this reasons he decided to install medical garrisons in factories to reduce these inconveniences. revolution in the industrial field Automation In modern plants, the human contribution is however limited. Most of the assembly lines are automated and the most repetitive jobs are carried out by industrial robots. In fact, these new technologies, as well as speeding up work, do not require a monthly salary and are extremely precise about the work to be done. This causes production to increase and the labour force to fall agai pag. 12 Uso del PLC per l’inversione di marcia di un motore asincrono trifase Che cos’è il PLC Il PLC è un’apparecchiatura elettronica programmabile in grado di interpretare ed eseguire le istruzioni dei programmi in essa memorizzati, interagendo con un circuito di controllo attraverso dispositivi d’ingresso (input) e d’uscita (output). In origine nella gestione o controllo dei processi industriali. Funzionamento; Il microprocessore (CPU) collocato all’interno del PLC, controlla i segnali provenienti in ingresso (input) dal sistema sottoposto a controllo, li elabora secondo il programma impostato dall’utente e determina di conseguenza le operazioni che gli attuatori, connessi in uscita (output), dovranno compiere. Flessibilità; La possibilità di adeguare un sistema a nuove esigenze di processo senza rivoluzionarne la configurazione fisica (hardware), ma solo agendo sul programma (software) Riciclo; Il PLC può essere riutilizzato più e più volte per la medesima applicazione o per nuovi sistemi, anche in condizioni ostili. pag. 13 Alimentatore; L'alimentatore è necessario per il funzionamento della CPU, eroga una tensione continua di pochi Volt (in genere da 5 a 24V). L’alimentazione degli ingressi è data dall’PLC, mentre le uscite sono alimentate dall’esterno. SCHEMA DI POTENZA (l’inversione di marcia di un motore asincrono trifase): Rappresenta le apparecchiature o le parti di apparecchiature che “collaborano”, mediante lo scambio di contatti. pag. 14 SCHEMA DI COMANDO (l’inversione di marcia di un motore asincrono trifase): Lo schema funzionale (o di comando) rappresenta in modo semplice il funzionamento delle apparecchiature che compongono l'impianto. Graficamente è caratterizzato da due linee orizzontale che rappresentano i conduttori di alimentazione e da una serie di linee verticale dove sono inseriti i componenti dell'impianto. pag. 15 SCHEMA KOP Il linguaggio KOP, nato a fine anni 60, ed è un linguaggio grafico, ecco perché è anche denominato come Ladder Diagram (LD). E’ utilizzato per la programmazione dei controllori logici programmabili (PLC), divenuto ormai il linguaggio standard di programmazione. E’ formato da segmenti, ognuno contiene i componenti dell’impianto indicandoli con una precisa classificazione I0.0, I0.1,Q.0.1,ecc.. Che corrispondono agli ingressi o uscite del PLC. pag. 16 SCHEMA FUP E’ un linguaggio grafico di programmazione che rappresenta la logica mediante i box dell'algebra booleana. pag. 17 Le tabelle della verità delle 5 porte logiche di base sono riportate in figura: La porta NOT inverte (o nega) il segnale di ingresso La porta NAND equivale a un AND la cui uscita è negata (l’output è falso solo se entrambi gli input sono veri) La porta NOR equivale a un OR la cui uscita è negata (l’output vero solo se entrambi gli input sono falsi). La porta AND ha output vero se e solo se entrambi gli input sono veri La porta OR ha output vero se almeno uno dei due input è vero pag. 18 FUNZIONE BOOLEANA 𝑌1 = ̅̅̅̅ 𝐹2 𝐴𝑁𝐷 ̅̅̅ 𝑆1 𝐴𝑁𝐷 (𝑆2 𝑂𝑅 𝐾1) 𝐴𝑁𝐷 ̅̅̅̅ 𝐾2 = 𝐴1.0 ̅̅̅̅̅̅ 𝐸0.0 𝐴𝑁𝐷 ̅̅̅̅̅̅ 𝐸0.1 𝐴𝑁𝐷 (𝐸0.2 𝑂𝑅 𝐴1.0) 𝐴𝑁𝐷 ̅̅̅̅̅̅̅ 𝐴1.1 = 𝐴1.0 ̅̅̅̅ 𝐴𝑁𝐷 𝑆1 ̅̅̅ 𝐴𝑁𝐷 (𝑆3 𝑂𝑅 𝐾2) 𝐴𝑁𝐷 𝐾1 ̅̅̅̅̅ = 𝐴1.1 𝑌2 = 𝐹2 ̅̅̅̅̅̅̅𝐴𝑁𝐷 𝐸0.1 ̅̅̅̅̅̅ 𝐴𝑁𝐷 (𝐸0.3 𝑂𝑅 𝐴1.1) 𝐴𝑁𝐷̅̅̅̅̅̅̅ 𝐸0.0 𝐴1.0 = 𝐴1.1 Y3 = F2 A1.2 = E0.0 ̅̅̅̅ 𝑌4 = 𝐾1 ̅̅̅̅̅̅ A1.3 = 𝐴1.0 𝑌5 = 𝐾1 A1.4 = A1.0 𝑌6 = 𝐾2 A1.5 = A1.1 Le funzioni Booleane e il processo di Minimizzazione In materia di circuiti digitali, soprattutto in ambito di progettazione logica dei circuiti ha un'importanza notevole il processo di Minimizzazione di una funzione booleana, in termini di porte AND, OR e NOT. In sostanza, si può dire che data una funzione booleana esistono molteplici sue rappresentazioni, pur non cambiando il suo numero caratteristico, quindi, trovare tra tutte le sue rappresentazioni o forme, quella che ha il numero minimo di porte elementari. pag. 19 AWL UN E0.0 UN E0.1 U( O E0.2 O A1.0 ) UN A1.1 = A1.0 UN E0.0 UN E0.1 U( O E0.3 O A1.1 ) U A1.0 = A1.1 U E0.0 = A1.2 UN A1.0 =A 1.3 U A1.0 = A1.4 U A1.1 = A1.5 E’ un linguaggio di programmazione testuale. Quando si crea un programma in AWL, le singole istruzioni corrispondono in larga misura alle operazioni con le quali la CPU elabora il programma. pag. 20 DEFINIZIONE DI FUNZIONI ED INTEGRALI INDEFINITI Definizione di funzione In matematica, una funzione è una relazione tra due insiemi, chiamati dominio e codominio della funzione, che associa a ogni elemento del dominio uno e un solo elemento del codominio. Si dice che x è l'argomento della funzione ovvero la variabile indipendente, mentre y= f (x), detta (espressione analitica), è un valore della variabile dipendente della funzione. Come abbiamo visto le funzioni matematiche sono dei particolari tipi di relazioni, che dato un valore di input permettono di calcolare un risultato o output. Una delle sue applicazioni più immediate è quindi quella di permetterci di calcolare determinati valori che ci servono nella risoluzione di un problema. pag. 21 Classificazioni delle funzioni La funzione è algebrica se y= f(x) che la descrive solo, per la variabile x, operazioni di addizione, sottrazione, moltiplicazione, divisione, elevamento di potenza o estrazione di radice. Una funzione è algebrica se; Razionale intera o polinomiale se è espressa tramite un polinomi, in particolare se il polinomio è di primo grado rispetto la variabile x, la funzione è lineare. Se il polinomio in x è di secondo grado, la funzione è quadratica; Razionale fratta se è espressa mediante quozienti di polinomi; Irrazionali se la variabile indipendente x compare sotto il segno di radice. Se una funzione y= f(x) non è algebrica, si dice trascendente. pag. 22 Integrale indefinito Prima però diamo un’ occhiata alle funzioni PRIMITIVE. Una funzione f(x) è una primitiva della funzione f’(x) definita nell’intervallo (a; b). La condizione di derivabilità si ha se f(x) è derivabile in tutto (a; b). In generale, se una funzione f’(x) ammette una primitiva f(x), allora ammette infinite primitive del tipo f(x) + c , con c numero reale qualunque. Interpretazione geometrica: Poiché tutte le primitive di una funzione f’(x) sono funzioni del tipo f(x) + c, geometricamente sono rappresentate da infinite curve piane , dette CURVE INTEGRALI, a ogni valore di c corrisponde una curva. Tutte le funzione hanno la stessa derivata perché nei punti con la stessa ascissa hanno tangente parallela. pag. 23 L’integrale indefinito di una funzione f’(x) è l’insieme di tutte le primitive f(x) +c, con c numero reale qualsiasi. Si indica con ʃ f’(x) dx. La funzione f’(x) è detta funzione integranda e la variabile x variabile di integrazione. La primitiva f(x) che si ottiene per c=0 si chiama primitiva fondamentale. Una funzione che ammette una primitiva (quindi infinite primitive), si dice integrabile pag. 24 LA NASCITA DELL’ EDUCAZIONE FISICA IN ITALIA Agli inizi dell’ottocento In Italia l’attenzione per la ginnastica cominciò a manifestarsi quando ci si rese conto di quanto fosse importante l’educazione fisica per l’unità della nazione, non solo per migliorare fisicamente, ma prepararsi mentalmente e formare il carattere, cosa che per i soldati era ed è di vitale importanza. (Educare infatti deriva dal latino ex ducere, ovvero “tirare fuori” in questo caso le proprie abilità). Per questo in Sardegna fu assunto un ginnasta svizzero, Rodolfo Obermann (1812-1868), che inizialmente fece scuola al corpo dei bersaglieri. L’efficacia dei suoi allenamenti portò alla decisione di estendere questa attività a tutti i reparti militari. pag. 25 La nascita e lo sviluppo della prima società di ginnastica Obermann fondò la prima società di ginnastica italiana nel 1844 a Torino avendo molto successo, tanto che il governo del Regno di Sardegna decise di rendere obbligatoria l’attività fisica nelle scuole elementari e superiori. Prima con la legge Casati del 1859, che rendette obbligatoria l’educazione fisica nelle scuole elementari, poi De Sanctis, ministro della pubblica istruzione, nel 1878, ha introdotto l’insegnamento obbligatorio dell’educazione fisica in tutte le scuole italiane, estendendo anche alle donne. Ma i pochi fondi, la mancanza di strutture debite e la scarsa professionalità degli insegnanti, ostacolò questa disciplina. Le cose migliorarono con Eugenio Baumann (1843-1917), medico e insegnante di ginnastica, il quale rivoluzionò il metodo di insegnamento dell’ educazione fisica applicando metodologie pedagogiche, igienico-biologiche e psicologiche, concentrandosi soprattutto sull’attenzione, la disciplina e l’obbedienza degli allievi. Proponendo una serie di pesanti e monotoni esercizi pre-militari. pag. 26 Una posizione diversa era quella divulgata da Angelo Mosso (1846-1910), scienziato di grande fama, che sosteneva che il metodo di Baumann fosse troppo pesante, che i veri interessi degli alunni sono il gioco e lo sport, attività più libere e ricreative, Mosso denunciò inoltre la pericolosità dei grandi attrezzi che includevano grandi sforzi a volte eccessivi e violenti, per ragazzi meno preparati. Dunque si penso ad una soluzione, con la legge n. 805 del ministro Credaro, che in sostanza è un compromesso tra le due metodologie, ma l’attività sportiva nella scuola continuò il suo modesto sviluppo con pochi impianti, programmi, personale scarsamente preparato e pochissimi finanziamenti. Periodo fascista Durante il periodo fascista, lo sport viene utilizzato nelle scuole per indottrinare politicamente la popolazione giovanile. Furono emanati 5 programmi relativi al insegnamento dell’educazione fisica. Nelle scuole vennero dedicate 2 ore settimanali all'insegnamento dell'educazione fisica e i programmi d'insegnamento, pubblicati a cura dell'ONB (opera nazionale balilla), prevedevano: per le prime due classi di elementari era prevista un'attività ginnica di carattere ricreativo; dalla terza classe in poi, il programma prevedeva anche il saluto romano, collettivo in classe e fuori, il saluto individuale, l'attenti, il riposo e la marcia in gruppo; nelle ultime due classi, erano previste evoluzioni «dalla file per uno contromarcia in fuori e in dentro; terziglia in linea e a sinistra; per tre fianco destro o sinistro»; per i giovani tra i 16 e i 18 anni erano previsti esercizi a corpo libero e agli attrezzi, volteggi, lanci, corse piane e ad ostacoli e marce non superiori ai 20 km. Fondamentale era alternare l'allenamento individuale con quello collettivo e di utilizzare le forme sportive anche per i fini dell'addestramento militare (in particolare, i lanci sono utilizzati per far pratica nel lancio delle bombe. pag. 27 Nel 1937 l’ONB fu sciolto e sostituito dalla GIL (Gioventù italiana Littorio) dipendente dal partito fascista e non più dal governo, in modo da legare ancor di più il paese e l’attività fisica al partito fascista. E’ chiaro che le pratiche motorie di quel periodo erano a scopo militare, oltre ad essere sotto il controllo del partito fascista. La maggior parte delle federazioni era riunita sotto il patrocinio del Comitato Olimpico Nazionale Italiano (C.O.N.I.), che aveva il compito di coordinare e disciplinare le manifestazioni sportive in Italia, oltre che provvedere alla protezione, al controllo ed allo sviluppo degli impianti sportivi della nazione. Al fine di garantire la partecipazione degli sportivi italiani alle gare olimpiche. Fondamentale è stata la legge del 7 febbraio 1958 che contribuiva a consolidare l’insegnamento dell’educazione fisica nelle scuole italiane. Inoltre venne risolto anche il problema della carenza di materiali e attrezzature da parte del C.O.N.I. che realizzo dei “campi scuola” grazie anche alla collaborazione con scuole ed enti locali. pag. 28 SITOGRAFIA Sistemi trifase: https://www.leonardocanducci.org/wiki/ee4/il_sistema_trifase, https://it.wikipedia.org/wiki/Sistema_trifase#:~:text=Un%20sistema%20trifase%2C%20n ell'elettrotecnica,la%20stessa%20frequenza%20(isofrequenziali), https://www.ipscarrara.edu.it/attachments/article/2767/Il%20sistema%20trifase%20parte %201.pdf. The assembly line: https://en.wikipedia.org/wiki/Assembly_line La nascita dell’educazione fisica in Italia: https://motricitascuola.altervista.org/attivita%20motoria/scuola.html?/attivita%20motoria/ chi_eravamo_come_siamo/sport_xix_ad_oggi/italia.html Definizione di funzione ed integrali indefinito: https://library.weschool.com/lezione/primitive-e-integrali-indefiniti-definizione-espiegazione-7762.html Uso del PLC per l’inversione di marcia di un motore asincrono trifase: https://it.wikipedia.org/wiki/Controllore_logico_programmabile pag. 29