caricato da
chiaracavallaronwg
Isolamento Passivo delle Vibrazioni: Sospensione Veicolo Stradale

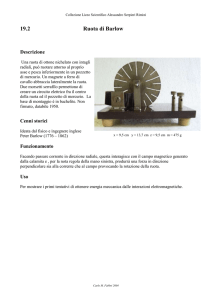
ESEMPIO DI APPLICAZIONE DELL’ISOLAMENTO PASSIVO DELLE VIBRAZIONI: LA SOSPENSIONE DI UN VEICOLO STRADALE. 1. Premessa Le ruote di un veicolo sono generalmente connesse al telaio mediante il sistema di sospensione che, essendo deformabile, garantisce il contatto ruote-suolo anche quando il veicolo ha più di tre ruote (sistema iperstatico). Le sospensioni sono costituite da un cinematismo, una molla ed uno smorzatore ed hanno il compito di: • consentire alla ruota di seguire le irregolarità del profilo stradale senza distaccarsi e quindi senza che vi sia perdita di aderenza (le asperità della superficie vengono assorbite dalla deformabilità del pneumatico); in tal modo il pneumatico e la strada possono scambiarsi le forze longitudinali (traenti e frenanti) e quelle laterali che nascono in presenza di azioni trasversali (forza centrifuga in curva, vento laterale, pendenza trasversale del suolo, . .) ; • ridurre le accelerazioni cui sono sottoposti passeggeri ed oggetti trasportati; • garantire l’assetto desiderato nelle diverse condizioni di marcia. Le caratteristiche del sistema di sospensione influenzano pertanto sia la tenuta di strada che il confort di un veicolo. La deformabilità della sospensione può comportare l’insorgere di oscillazioni del veicolo che devono essere rapidamente smorzate dagli smorzatori (detti anche ammortizzatori). 2. Dinamica della monosospensione Alcune utili indicazioni sul funzionamento di un veicolo munito di sospensioni vengono fornite dal modello di monosospensione (o quarter car model, Fig.2.1a) costituito da ¼ della massa del veicolo, m (massa sospesa), connessa ad una ruota mediante una sospensione di rigidità k e smorzamento ; nello schema viene indicato con mw la massa della ruota e degli organi ad essa solidali (massa non sospesa) e con kw , w la rigidezza radiale e lo smorzamento della ruota con pneumatico. Il sistema è ha due gradi di libertà; in prima approssimazione e possibile considerare la ruota rigida e priva di massa risultando: mw m/10 e kw 10 k. In tal modo si ottiene un sistema ad un sol grado di libertà, i cui risultati possono considerarsi validi se la frequenza di eccitazione risulta minore della seconda frequenza naturale del sistema. Si supponga che la monosospensione proceda in rettilineo, a velocità costante V, su un profilo stradale onduloso; l’ondulosità del profilo stradale è caratterizzata da una certa periodicità e quindi, in prima approssimazione, si può considerare la sua armonica fondamentale di lunghezza d’onda L ed ampiezza Xk (Fig. 2.1b). Tali grandezze dipendono dalla categoria della strada; ad esempio, le strade con fondo di buona qualità (autostrade,..) presentano una armonica fondamentale avente lunghezza d’onda pari a circa 5÷10 m ed una ampiezza di circa 5 mm. Lo schema può considerarsi valido se il diametro della ruota è molto minore della lunghezza d’onda in modo che l’asse della ruota possa seguire l’andamento del profilo (se risultasse, ad es., L<<D, la ruota toccherebbe solo le creste dell’onda). Sulle stesse strade vi possono essere dei tratti caratterizzati da una lunghezza d’onda dell’armonica principale notevolmente maggiore; ciò può accadere, per esempio, sui viadotti per la presenza dei giunti tra le campate, posti a distanze generalmente comprese tra 25 e 40m. 2 m k v m k Xk mw kw w L a) b) Fig. 2.1 Il profilo stradale impone un moto verticale armonico all’asse della ruota che forza la massa sospesa m a vibrare con un periodo T che dipende dalla velocità di avanzamento V e dalla lunghezza d’onda L, risultando: T=L/V. Il moto relativo verticale tra l’asse della ruota e la massa m può valutarsi immaginando di vincolare la massa m in modo che possa traslare solo lungo la direzione verticale ed imponendo al profilo stradale un moto orizzontale con velocità orizzontale costante pari a –V (Fig.2.2). x m k m k v x(t) O G Ok x k(t)=X kcos( t) Fig. 2.2 Ci si riconduce allo schema di figura 2.2b; la traccia dell’asse della ruota (Ok) è forzata a muoversi lungo la direzione verticale con legge armonica: xk (t ) = X k cost . Risultando: = 2 2 = T L /V ; corrispondente frequenza vale: f = V . L Di conseguenza, la massa m assume la seguente legge di moto: x(t ) = X cos(t − ) essendo: - X = Xk A , l’ampiezza del moto (A = coefficiente di amplificazione); 3 - ϕ, il ritardo di fase del moto della massa x(t) rispetto al moto imposto all’asse della ruota xk(t); L’ampiezza del moto della massa sospesa m può desumersi della trasmissibilità dello spostamento, definita come rapporto tra l’ampiezza dello spostamento imposto alla ruota e l’ampiezza del moto della massa m. Dallo studio dei sistemi vibranti è noto che la trasmissibilità dello spostamento assume la seguente espressione: T= X = Xk 1 + 2 cr n 2 2 2 1 − + 2 2 cr n n 2 Nella figura 2.3, sono rappresentate le curve della trasmissibilità in funzione del rapporto / n , per diversi valori del rapporto di smorzamento : = = cr 2 km Poiché risulta: / n = f / f n = V /(Lfn ) , si ha che, per un assegnata lunghezza d’onda, la trasmissibilità di una monosospensione, avente frequenza naturale fn, dipende dalla velocità di avanzamento V. Dal grafico si evince che: - indipendentemente dallo smorzamento, la trasmissibilità è sempre unitaria in corrispondenza del valore 2 del rapporto delle frequenze; - l'adozione delle sospensioni consente di ridurre la trasmissibilità dello spostamento se il rapporto delle frequenze è maggiore di 2 ; in tali condizioni la trasmissibilità aumenta al crescere di ; - per valori del rapporto delle frequenze minori di 2 , l'introduzione delle sospensioni incrementa la trasmissibilità degli spostamenti; la presenza dello smorzatore consente di contenere l’ampiezza X del moto verticale della massa sospesa - se lo smorzamento assume valore infinito (assenza di sospensione), la trasmissibilità assume valore unitario per ogni valore della velocità. 4 Fig. 2.3 Al variare della velocità di avanzamento si ha risonanza quando la frequenza f della forzante eguaglia la frequenza naturale fn del sistema; ciò avviene per un valore della velocità di avanzamento detta velocità critica di avanzamento: Vcr = L f n . In tali condizioni l’ampiezza dalle oscillazioni della massa sospesa possono essere più o meno amplificate a seconda dello smorzamento degli ammortizzatori. Le frequenze fisiologicamente tollerate dall’uomo sono comprese nell’intervallo 12 Hz; per tale motivo le sospensioni dei veicoli vengono proporzionate in modo che le frequenze naturali ricadano nell’intervallo suddetto. Una monosospensione avente frequenza naturale di 1 Hz, che avanza su un profilo armonico con lunghezza d’onda L=5m, ha quindi una velocità critica pari a: Vcr=5m/s=18km/h; se invece la lunghezza d’onda del profilo stradale è pari a 30m (es. transito su un viadotto) si ha: Vcr = 30m/s = 108km/h. Dal diagramma di figura 2.3 si vede che al crescere della velocità di avanzamento l’ampiezza del moto verticale della massa sospesa tende ad annullarsi; è importante però valutare anche l’andamento dell’accelerazione verticale al variare della velocità V poiché da essa dipendono le forze d’inerzia verticali. Al crescere della velocità di avanzamento infatti si riduce l’ampiezza del moto ma aumenta la pulsazione del moto e di conseguenza il modulo dell’accelerazione X2 della massa sospesa. Per avere un buon compromesso tra piccola ampiezza del moto e bassa accelerazione si dimostra che il rapporto cr deve valere circa 0.354. Esempio di dimensionamento: Se il veicolo ha una massa M=1200kg, la massa sospesa della monosospensione vale circa: m=300kg. Per avere una frequenza naturale di 1Hz la rigidezza equivalente della sospensione deve valere: K=(2*)2 * 300 = 11844 N/m Scegliendo: c=0.3, si ha: = √𝑚 ∗ 𝐾 = Ns/m. 5 Dal diagramma della trasmissibilità per c=0.3 e per il valore fissato di n=2* si ottiene un massimo valore di trasmissibilità pari a T= 1.9946 in corrispondenza del rapporto di pulsazione n = 0.9295