Elementi di propulsione elettrica di veicoli
INDICE
1. Introduzione ---------------------------------------------------------------------------------------------2 2. Generalità ------------------------------------------------------------------------------------------------2 2.1. Caratteristica meccanica per la propulsione -------------------------------------------------------------- 2 2.2. Controllo dei mezzi ------------------------------------------------------------------------------------------ 5 3. Azionamenti basati sulla macchina in corrente continua ----------------------------------------8 3.1. Generalità------------------------------------------------------------------------------------------------------ 8 3.2. Equazioni elementari della macchina in corrente continua --------------------------------------------- 8 3.3. Avviamento e indebolimento di campo di azionamenti con macchine in corrente continua prive di
convertitori elettronici ----------------------------------------------------------------------------------------------- 9 4. Mezzi di trazione a Frazionatore ------------------------------------------------------------------- 11 4.1. Il funzionamento ideale del frazionatore ---------------------------------------------------------------- 11 4.2. Frazionatore alimentante macchina a collettore -------------------------------------------------------- 14 4.2.1. Limiti della regolazione ------------------------------------------------------------------------------------------------ 15 4.3. Utilizzo del frazionatore in azionamenti con motore in corrente continua ------------------------- 15 5. Mezzi di trazione con azionamenti asincroni trifasi --------------------------------------------- 17 5.1. 5.2. 5.3. 5.4. Introduzione ------------------------------------------------------------------------------------------------- 17 Richiami del funzionamento della macchina asincrona a tensione e frequenza costante --------- 18 Funzionamento a flusso costante ------------------------------------------------------------------------- 20 Funzionamento a flusso variabile ------------------------------------------------------------------------ 24 6. Mezzi di trazione con azionamenti sincroni trifasi ---------------------------------------------- 26 6.1. 6.2. 6.3. 6.4. 6.5. Richiami del funzionamento della macchina sincrona isotropa e anisotropa ---------------------- 26 Caratteristica meccanica limite (macchina anisotropa) ----------------------------------------------- 28 Caratteristica meccanica limite (macchina isotropa) -------------------------------------------------- 31 Controllo----------------------------------------------------------------------------------------------------- 34 Alimentazione dei motori di un veicolo ----------------------------------------------------------------- 34 Elementi di propulsione di veicoli a pantografo, pag. 1
1. Introduzione
La propulsione elettrica, che utilizza un azionamento elettrico per la generazione del moto di
veicoli è utilizzata in certa misura quasi tutti gli ambiti veicolari: strada (biciclette elettriche, veicoli a due e quattro ruote alimentati a batteria, autoveicoli a propulsione ibrida), ferrovia (veicoli ferroviari con alimentazione da pantografo o a propulsione diesel-elettrica, tram, filobus, metropolitane) mare (navi a propulsione diesel-elettrica o turbo-elettrica, sommergibili con alimentazione a
batteria o a celle a combustibile) aria (taluni veicoli a propulsione elettrica, detti All Electric Aircrafts – AEA).
Fra questi settori, nel campo di interesse del corso di studi di Ingegneria dei Veicoli sono da
considerare la propulsione elettrica stradale e ferroviaria.
Nel modulo di Sistemi elettrici di Bordo la parte relativa alla propulsione elettrica si dedicherà
alla propulsione elettrica stradale, mentre quella ferroviaria verrà trattata nel secondo periodo in
apposito modulo.
Taluni argomenti a comune, ad esempio il funzionamento a frequenza variabile delle macchine
trifasi, verranno trattati nel primo modulo a livello semplificato e approfondito nel secondo modulo.
La propulsione elettrica stradale inevitabilmente tratta argomenti che risulteranno poi di grande
utilità nella trattazione dei veicoli a propulsione ibrida, in cui la potenza prodotta dal sottosistema
di propulsione elettrica è solo una frazione della potenza globalmente necessaria alle necessità del
veicolo.
L’approccio semplificato del primo modulo, ha fra l’altro, il vantaggio di facilitare la trattazione
dei veicoli a propulsione ibrida.
Su molti degli argomenti trattati nel presente documento verranno svolte simulazioni numeriche
durante le esercitazioni, durante le quali, fra l’altro, dettagli del funzionamento non visualizzabili
con trattazioni matematiche semplificate, potranno essere correttamente visualizzate ed analizzate.
2. Generalità
2.1. Caratteristica meccanica per la propulsione
Per caratteristica meccanica dell’apparato propulsivo di un veicolo1 intendiamo il diagramma
coppia-velocità che riporta in ascisse la velocità del veicolo e in ordinata il massimo valore che in
corrispondenza di tale velocità il veicolo può sviluppare, in determinate condizioni di
alimentazione dell’apparato propulsivo.
Questa caratteristica può essere tracciata per un veicolo apropulsione meccanica, o per un
veicolo a propulsione elettrica. le determinate condizioni di alimentazione dell’appparato
propulsivo saranno, rispettivamente, l’alimentazione elettrica della macchina elettrica utilizzata per
la propulsione o la portata di combustibile o il grado di immissione del combustibile nel caso di
motore a combustione interna.
Per caratteristica meccanica limite intendiamo il diagramma che associa ad ogni velocità del
mezzo la massima coppia da esso erogabile. Nella fig. 1 sono indicati esempi di andamento della
caratteristica meccanica di un veicolo dotato di motore a combustione interna, con i vari valori del
rapporto di riduzione realizzato mediante il cambio di velocità, nonché l’andamento ottenibile, con
accorgimenti che verranno illustrati in seguito, con un sistema di propulsione elettrica privo di
1
Normalmente si utilizza la terminologia anglosassone e in luogo di apparato propulsivo si adotta l’espressione power train.
Elementi di propulsione di veicoli a pantografo, pag. 2
cambio di velocità.
Si può osservare come la caratteristica limite del sistema a propulsione elettrica possa essere in
qualche modo assimilata all’inviluppo delle caratteristiche meccaniche limite ai vari rapporto del
cambio di un veicolo dotato di motore a combustione interna.
Fig. 1: Esempi di caratteristiche meccaniche limite di veicoli a propulsione convenzionale ed elettrica.
In effetti la caratteristica meccanica limite riportata nella parte destra della fig. 1 può essere considerata come una caratteristica ideale: fra la velocità base e la velocità massima la forza ha un andamento iperbolicamente decrescente con la velocità, realizzando un andamento a potenza costante. tutta la potenza disponibile da parte del power train, quindi è utilizzabile nell’intero campo di
velocità fra vbase e vmax (nella figura 200 km/h). Per marcia a più bassa velocità sarà disponibile una
maggiore forza di trazione, utilizzabile ad esempio per accelerazioni o marcia in salita mentre per
la marcia in piano a velocità costante, che non richiede una elevata forza di trazione, è possibile
raggiungere velocità elevate.
Man mano che la velocità decresce, partendo da quella massima, quindi, la massima forza di
trazione aumenta. Proseguendo così, si raggiunge inevitabilmente il limite di aderenza del contatto
ruota strada, (o ruota rotaia nel caso dei treni), e non risulta utile scendere ulteriormente con la zona
di funzionamento a potenza costante.
Per un’autovettura la forza di trazione massima che conviene realizzare è dell’ordine di 10 kN,
come rappresentato in figura.
Infatti il coefficiente di aderenza difficilmente raggiunge il valore unitario. La massima forza trasmissibile alla strada da un veicolo di massa di 10 Mg con coefficiente di aderenza unitario è quindi proprio 10 kN nell’ipotesi di trascurare, alle basse velocità, le resistenze al moto del veicolo (che effettivamente per quelle velocità risultano essere
molto modeste rispetto al limite di aderenza stesso).
Il rapporto vmax/vbase è un parametro di grande importanza nella valutazione di un apparato
propulsivo e viene spesso denominato elasticità dell’azionanamento o, in campo internazionale,
speed ratio.
Quando si ragiona sul veicolo la caratteristica meccanica del power train viene normalmente
riportata, come nella fig. 1, riportando sull’asse orizzontale la velocità del veicolo e sull’asse verticale la forza di trazione. Quando si ragiona invece specificatamente sull’apparato propulsivo stesso
può risultare conveniente sostituire la velocità traslazionale del veicolo con la velocità angolare
della macchina che produce il moto, la forza di trazione con la coppia erogata.
A parità di rapporto al cambio di velocità fra la macchina e le ruote, quando esistente, i due tipi
di grafici hanno forma molto simile, in quanto da un lato la velocità angolare dell’albero delle macchine di propulsione è sostanzialmente proporzionale alla velocità traslazionale del veicolo (la proporzionalità è più marcata per i veicoli ferroviari, in cui fenomeni di scorrimento dell’accoppiamento ruota-sede di rotolamento sono trascurabili), dall’altro anche le coppie sono sostanzialmente proporzionali alle forze propulsive: lo sarebbero esattamente se si trascurassero le perdite di
coppia negli organi meccanici di trasmissione fra l’albero della macchina e la ruota, ruota inclusa.
Nel caso di presenza di cambio meccanico, per quanto detto, la caratteristica C-, con buona
approssimazione, ha la stessa forma di una delle caratteristiche riportate nella parte sinistra della
fig. 1, in corrispondenza di una qualunque delle marce del cambio.
1,2
A
1
F*
0,8
B
F/F*
R
0,6
0,5*P/Pmax
0,4
P
0,2
0
0
0,2
0,4
0,6
0,8
1
/ max
Fig. 2: Caratteristica meccanica limite ideale
di un mezzo di trazione
Per caratteristica meccanica limite (o caratteristica meccanica alle massime prestazioni) di un
veicolo intendiamo il diagramma che associa ad
ogni velocità del mezzo la massima coppia da esso
erogabile. Nella fig. 2 è indicato un andamento della caratteristica meccanica limite che possiamo
considerare ideale. Ovviamente il concetto di caratteristica meccanica limite può essere utilizzato anche nella rappresentazione della caratteristica meccanica di un azionamento propulsivo nel piano C.
Nel primo tratto si ha una forza di trazione costante. Questo andamento è coerente con la necessità di porre un limite, a prescindere in questo momento da considerazioni sulla potenzialità dei
motori di trazione, alla forza di trazione per evitare slittamenti per superamento del coefficiente di
aderenza.
Nel caso dei veicoli ferroviari si osserva in realtà una certa riduzione del coefficiente di aderenza al crescere della
velocità, e questo trova talvolta riscontro nella caratteristica meccanica limite ad attribuita ai relativi azionamenti
propulsivi, che possono avere il tratto A, invece che costante, leggermente decrescente.
In questo primo tratto la potenza generata dal veicolo cresce con la velocità, in maniera lineare
se la forza è costante. Raggiunta la potenza nominale deve necessariamente iniziare un tratto a forza decrescente. L’ideale consiste nell’avere una erogazione di potenza costante in un ampio campo
di velocità: in tal modo si sfrutta al meglio la potenza del power-train, ottenendosi veicoli flessibili
nell’utilizzo, nel senso che sono in grado di sfruttare la loro potenza massima in ampi campi di velocità.
Ad esempio si può citare il caso ferroviario, per i quali risulta interessante poter adoperare efficacemente medesime
motrici per pesanti convogli merci o veloci convogli passeggeri.
Nella stessa figura è mostrato un possibile andamento della forza resistente al moto R. L’intersezione delle caratteristiche relative alla forza motrice e quella resistente individua il punto di funzionamento di equilibrio P relativo alla vettura funzionante alle massime prestazioni e con il dato andamento della forza resistente.
In generale una sola curva sulla caratteristica meccanica risulta insufficiente alle esigenze della
propulsione; deve infatti risultare possibile la marcia a varie velocità, per un certo andamento della
forza resistente. Punti di funzionamento appartenenti alla zona compresa fra la caratteristica meccanica limite e gli assi sono di norma anche possibili.
Nel caso della propulsione veicolare si dà grande valore alla possibilità che la propulsione elettrica offre di rinunciare al cambio meccanico, con i relativi vantaggi di complessità, costo, ingombro, comfort di marcia.
Al fine di evitare di sovradimensionare eccessivamente l’azionamento, per ottenere questo risulElementi di propulsione di veicoli a pantografo, pag. 4
tato risulta evidente poter disporre di un’ambia zona della caratteristica meccanica a velocità costante. Il rapporto fra la velocità massima e la velocità base di un azionamento viene spesso denominata elasticità dell’azionamento, (o speed ratio in letteratura internazionale). Al fine di realizzare un buon azionamento stradale di tipo ferroviario è opportuno poter disporre di un’elasticità almeno pari a 3, mentre per un azionamento stradale vengono richiesti valori più ampi, dell’ordine di
5-6, in ragione della variabilità molto maggiore del campo di velocità utilizzate: basse velocità in
ambito urbano, medie in ambito extraurbano, alte nella marcia autostradale.
Occorre rimarcare che anche se la fig. 2 riporta soltanto il primo quadrante del piano C-, normalmente la macchina elettrica (e l’azionamento composto da essa e dal suo convertitore) è in grado di funzionare su tutti e quattro i quadranti del medesimo piano: marcia avanti e indietro, protrazione e frenatura.
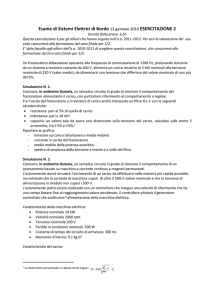
A titolo di esempio si riportano nella figure le zone di possibile funzionamento (con anche indicazione dei valori di efficienza all’interno di esse) delle due macchine elettriche presenti nella Toyota Prius (I serie).
Il diagramma a sinistra riguarda il cosiddetto generatore, per il quale è possibile un funzionamento continuativo significativo su tutti e quattro i quadranti; quello a destra riguarda il cosiddetto
motore per il quale è significativo solo il semipiano con velocità positive, in quanto velocità negative sono usate solo per la retromarcia nella quale il motore a bassissime velocità e potenza e per
brevi durate, quindi senza particolari esigenze di efficienza.
Fig. 3: Regioni di funzionamento e valori di efficienza delle due macchine elettriche
della Toyota Prius serie I (2)
2.2. Controllo dei mezzi
Il controllo dei veicoli viene realizzato da un pilota, il quale ne determina il moto agendo sui
comandi: colante, leva del cambio, pedali.
Per quanto riguarda l’azione sul volante, essa non ha effetti sul funzionamento dell’azionamento
propulsivo, e non va quindi considerato nell’ambito in cui ci muoviamo in questo documento.
L’azione sulla leva del cambio ha invece effetti, ma nel caso della propulsione elettrica la leva
del cambio è quasi sempre assente, in quanto di effettua una riduzione di velocità fra il motore e le
ruote a rapporto fisso.
2
Th. Hofmann et al: “A fundamental case study on the Prius and IMA drivetrain concepts”, disponibile on-line:
«http://yp.bmt.tue.nl/pdfs/4996.pdf.
Rimangono i due pedali: quello dell’acceleratore e del freno.
Si può dire che l’azione combinata del pedale dell’acceleratore e del freno determina, in ampiezza e segno, la coppia che attraverso l’azionamento propulsivo e i freni deve essere applicata
alle ruote.
Concentriamoci inizialmente sull’interpretazione della posizione del pedale dell’acceleratore.
Effettuare una corrispondenza biunivoca fra la posizione del pedale dell’acceleratore e la desiderata coppia propulsiva è possibile, ma presenta l’inconveniente di non attuare la cosiddetta azione
frenante in rilascio. E’ ben noto a tutti che nei veicoli tradizionali il rilascio del pedale
dell’acceleratore determina, per così dire, automaticamente una certa azione frenante sul veicolo,
dovuta alla coppia necessaria a far muovere il motore (con la corrispondente azione di pompaggio
dell’aria), un motore a combustione interna anche in assenza di immissione di combustibile in camera di combustione.
Questa coppia in rilascio risulta utile per migliorare la guidabilità del veicolo, in quanto consente di determinare una modesta azione frenante senza dover spostare il piede dal pedale
dell’acceleratore a quello del freno. E’ quindi opportuno riprodurre una soluzione simile anche nei
veicoli a propulsione elettrica non soltanto per emulare, per continuità, quanto accade nei veicoli
tradizionali, ma soprattutto per la migliore guidabilità che se ne ottiene.
E’ quindi possibile attuare, durante l’interpretazione del segnale elettrico proveniente dal pedale
dell’acceleratore, delle logiche di interpretazione delle intenzioni del piota che consentano anche
l’intervento di coppie negative in rilascio.
Una possibile logica per ottenere questo risultato è illustrata in figura 4.
La curva r (per semplicità rappresentata come una retta) individua la coppia che viene richiesta
all’azionamento propulsivo a pedale acceleratore completamente rilasciato, alle varie velocità
dell’azionamento stesso. Per una generica velocità, quindi, le coppie richieste in funzione della posizione del pedale di accelerazione, vanno dal punto A (pedale completamente rilasciato) al punto
B (pedale completamente premuto). Di conseguenza alle varie velocità si ha una coppia di rilascio
crescente (in valore assoluto), al crescere della velocità del motore e quindi del veicolo.
Traction
Torque
B
electr.
Braking
0
A
r
Fig. 4: Effetto del rilascio sulla frenatura elettrica.
Naturalmente deve essere sempre possibile effettuare frenature più vigorose, agendo sul pedale
del freno.
Occorre qui rilevare che mentre il pedale dell’acceleratore è sempre connesso ad un segnale elettrico (drive by wire) che ne misura la posizione e che viene poi utilizzato per interpretare le azioni del pilota, il pedale del freno viene ad oggi sempre connesso al circuito idraulico in quanto un
eventuale “brake by wire” non è ritenuto in grado di garantire l’affidabilità necessaria per una funzione, la frenatura, così vitale per il corretto funzionamento del veicolo.
Elementi di propulsione di veicoli a pantografo, pag. 6
E’ comunque ancora possibile combinare l’azione di frenatura elettrica all’azione di frenatura
meccanica in un veicolo elettrico, utilizzando la prima parte della corsa del pedale del freno per
comandare un’azione di ulteriore frenatura elettrica, prima dell’intervento della terza aliquota, la
frenatura meccanica.
La situazione può essere rappresentata come in figura 5, in cui è riassunta l’interpretazione delle
funzioni del pedale acceleratore e del freno.
Le zone ombreggiate della caratteristica meccanica dell’azionamento sono relative alle coppie,
positive o negative, che possono essere erogate elettricamente.
La retta r , come nella figura precedente, indica la coppia di rilascio che viene determinata in assenza di azioni da parte del pilota su entrambi i pedali. Il tratto da A a B, come già osservato, determina la generazione di coppie positive per effetto di azione sul solo pedale dell’acceleratore,
mentre la coppia da A a P è richiesta durante la corsa elettrica del pedale del freno. Se il pilota
preme ulteriormente il freno, ulteriori coppie negative possono essere ottenute per frenatura meccanica, nel tratto P-Q.
Traction
Torque
B
Braking
0
A
P
Q
r
Fig. 5: Azione frenante cominando rilascio, frenatura elettrica, frenatura meccanica.
Una volta determinata la coppia desiderata dal pilota, attraverso le logiche fin qui descritte, tale
richiesta verrà inviata come input ai controllori della propulsione, che verranno descritti caso per
caso per i vari tipi di azionamenti nei paragrafi seguenti.
Occorre qui notare che l’assieme veicolo-pilota, viene normalmente inteso come un sistema in
grado di seguire un profilo di velocità.
Ad esempio per la valutazione in simulazione, a anche sperimentale delle prestazioni e delle emissioni dei veicoli, essi vengono sottoposti a dei cosiddetti “profili di velocità”, quale ad esempio
il NEDC (New European Driving Cycle, fig. 6), che sono appunto dei diagrammi tempo-velocità.
Fig. 6: Il ciclo standard europeo per autovetture, ciclo NEDC.
Nelle simulazioni che verranno proposte nelle esercitazioni, come di prammatica, si modellizzerà il pilota come un semplice inseguitore di un riferimento di velocità, secondo quanto riportato alla
fig. 7b.
valori
desiderati
+
e
Controllo
v(t)*
T*
+
misure
T*
Controllo
-
pilota
e
a)
b)
v mis(t)*
pilota
(modello semplificato)
Fig. 7: Il pilota come controllore di velocità.
Il pilota ha in mente un profilo dell’andamento della velocità nel tempo v(t), che cerca di inseguire attuando una propria strategia di controllo. Nei simulatori del funzionamento del veicolo è
normalmente presente un modello del pilota. Spesso tale modello è estremamente semplice, ad esempio il blocco “controllo” può essere realizzato con un controllore proporzionale-integrale, o addirittura solo proporzionale.
L’uscita del pilota è il riferimento di coppia T* che è trasferito al veicolo attraverso i pedali
dell’acceleratore e del freno. L’uscita del blocco della fig. 7 costituisce quindi l’ingresso dei diagrammi di regolazione che verranno proposti nei successivi paragrafi. Mezzi di trazione di tipo tradizionale in c.c. con motore a collettore.
3. Azionamenti basati sulla macchina in corrente continua
3.1. Generalità
La macchina a corrente continua non è usata come convertitore elettromeccanico di azionamenti
propulsivi in nuove installazioni da alcuni decenni.
La macchina in corrente continua è utilizzata però, per le sue caratteristiche di economicità, in
piccoli azionamenti per la movimentazione a bordo di autovetture, quali ad esempio gli specchietti
retrovisori, i sedili, gli schienali, ecc.
La trattazione matematica di questo tipo di azionamenti è peraltro particolarmente semplice, e
utile ad inquadrare correttamente alcune problematiche fondamentali che si ritrovano anche negli
azionamenti basati su alimentazione in corrente alternata a frequenza variabile di convertitori elettromeccanici.
Per quanto detto si riportano in questo paragrafo soltanto talune considerazioni di base di azionamenti basati sulla macchina operante in corrente continua.
3.2. Equazioni elementari della macchina in corrente continua
Per mezzi di trasporto di tipo tradizionale in cc con motore a collettore indichiamo tutti i mezzi
dotati di questo tipo di motore, ad eccitazione serie, che non utilizzano apparecchiature elettroniche
di potenza (frazionatori, raddrizzatori, ecc.) per la modulazione delle grandezze elettriche realizzate.
La caratteristica meccanica di un motore eccitato serie può essere agevolmente ricavata nell’ipotesi di linearità della caratteristica di eccitazione a partire dalle relative equazioni:
T k I k k I I Lm I 2
(1)
U E RI k RI (kk R) I ( Lm R) I
con ovvio significato di simboli, da notare che Lm kk è dimensionalmente omogeneo con
un’induttanza ed è talvolta chiamata induttanza mutua statore-rotore per ragioni che qui è impossibile approfondire. La resistenza R è la somma della resistenza di armatura e quella di eccitazione.
Di conseguenza:
Elementi di propulsione di veicoli a pantografo, pag. 8
LmU 2
(2)
( Lm R) 2
Se si esclude il tratto iniziale dell’avviamento del motore nel quale è molto piccolo, R si può
trascurare rispetto a Lm e si può quindi scrivere:
U2
T
1/ n 2
2
(3)
Lm
T
essendo l’ultima proporzionalità valida nell’ipotesi di tensione effettivamente costante ai morsetti
della macchina, ed essendosi con n indicata, come usuale, la velocità angolare del rotore della macchina espressa in giri al minuto primo.
Coppia e corrente di spunto (=0) possono essere immediatamente ricavati e sono pari a:
T=LmU2/R2
Is=U/R.
Questi due valori sono però entrambi troppo elevati, per essere accettabili rispettivamente per
questioni di aderenza e riscaldamento dei conduttori del motore. L’avviamento va quindi attuato
utilizzando adeguate tecniche che verranno descritte nel prossimo paragrafo.
3.3. Avviamento e indebolimento di campo di azionamenti con macchine in corrente continua prive di convertitori elettronici
1
1
0,8
F/Fmax
0,6
2
R
0,4
P/Pmax
0,2
0
0
0,2
0,4
0,6
0,8
1
v/vmax
Fig. 8: Caratteristica meccanica idealizzata di propulsione con
motore a collettore eccitato in serie.
Abbiamo visto come la caratteristica meccanica di un mezzo di trazione richieda, quanto meno
per ragioni di aderenza, di non oltrepassare in avviamento una forza massima. Per tale ragione si è
visto come i motori debbano essere dotati di un sistema di modulazione della potenza erogata che
consenta di ottenere una forza di trazione costante (o leggermente decrescente) nel primo tratto della caratteristica meccanica, il che comporta un andamento della potenza che cresce in maniera sostanzialmente lineare (fig. 8, relativa al motore con eccitazione serie).
Inoltre la resistenza interna dei motori e collettore, ovviamente piccola per ragioni di rendimento, è tale che se la macchina venisse alimentata a piena tensione e rotore fermo, la corrente assorbita sarebbe inaccettabile e condurrebbe al danneggiamento della macchina stessa.
Per queste due ragioni (necessità di limitare coppia e corrente all’avviamento) non è utilizzabile
l’avviamento a piena tensione della macchina, a meno di non interporre dei resistori addizionali
detti resistori di avviamento.
Il resistore di avviamento ha l’effetto di ridurre il valore della corrente assorbita in quanto aumenta il valore di R nell’equazione:
I U / ( Lm R)
Elementi di propulsione di veicoli a pantografo, pag. 9
Chiusure
T1 T2 T3
T1
F
T2
Fmax
T3
n
Fig. 9: Schema di principio dell’avviamento reostatico.
e di ridurre la coppia di spunto all’avviamento aumentando il valore di R nella (2); introducendo
valori decrescenti di resistenza, secondo lo schema rappresentato in fig. 9, si riesce a fare in modo
che la forza di trazione (proporzionale come si è visto al suo quadrato) abbia escursioni limitate
intorno ad un valor medio di riferimento Fmax.
Per ottenere particolari risultati, ad es. limitare la coppia di avviamento generata dai motori in
corrente continua, oltre al reostato di avviamento sono usate in ambito ferroviario anche altre tecniche quali connessioni serie/parallelo di motori su cui non ci si sofferma in questa sede.
Fig. 10: Possibili schemi per l’indebolimento di campo:
a) con resistore in parallelo b) con bypass parziale.
Un altro grado di libertà utilizzabile negli azionamenti tradizionali a motore a collettore consiste
nella variazione del flusso di eccitazione mediante la tecnica dell’indebolimento di campo. Questo
comporta una riduzione della costante k che compare nella (1) e quindi della k1 nella (3), che può
essere applicata in quanto l’indebolimento di campo si applica ad avviamento ormai ultimato
(quindi a velocità sufficientemente elevata da poter trascurare in prima approssimazione gli effetti
delle cadute resistive sull’equilibrio elettrico). In definitiva, quindi, l’indebolimento ha l’effetto di
comportare, a parità di velocità angolare, coppie motrici maggiori, effetto analogo a quello ottenibile mediante aumento della tensione di alimentazione del motore.
In sistemi propulsivi con motore a corrente continua, privi di convertitori elettronici, ormai obsoleti, l’indebolimento di campo veniva ottenuto o con l’utilizzo di resistori in parallelo
all’avvolgimento di campo (fig. 10 a) o riducendo il numero di spire interessate al transito della
corrente di eccitazione (fig. 10 b). Trattandosi di schemi ormai obsoleti non ci sofferma su vantaggi/svantaggi delle due soluzioni.
La marcia a campo indebolito, a differenza dell’uso del reostato di avviamento, comporta dei
rendimenti energetici del motore confrontabili con quelli al funzionamento nominale. In particolaElementi di propulsione di veicoli a pantografo, pag. 10
re, si può osservare che sia il resistore in parallelo che il bypass riducono la resistenza equivalente
dell’induttore di campo Lc, con riduzione delle perdite per magnetizzazione a parità di corrente.
L’insieme delle curve di funzionamento ottenibili con un unico motore di trazione, sfruttando
sia il reostato di avviamento che l’indebolimento di capo è riportato in fig. 11 a); analoghi andamenti nel caso di due motori, i quali possono essere connessi sia in serie che in parallelo, sono mostrati in fig. 11 b). Nella figura a), in tratto a maggior spessore è mostrata la curva ottenibile alle
massime prestazioni, nonché il relativo valore mediato che costituisce una curva che riproduce il
valore ideale della caratteristica di trazione, con la prima parte di coppia costante e la seconda parte
di coppia decrescente con legge di proporzionalità inversa con la velocità angolare.
Nella figura b) sono mostrati ancora i tratti mediati a forza costante e potenza costante, e le molteplici caratteristiche ottenibili con locomotore con resistori di avviamento, indebolimento di campo, e due motori di trazione. Ovviamente le caratteristiche individuano molteplici punti di lavoro e
sono sfruttabili anche ben al di sotto della caratteristica alle massime prestazioni.
P=cost
F/Fmax
1
P=cost
0,8
a)
0,6
b)
0,4
funz. con reostato
0,2
funz. con ind. di campo
0
0
0,2
0,4
0,6
0,8
v/vmax1
Fig. 11: Caratteristiche meccaniche di macchina in DC a collettore:
a) macchina singola b) sistema di due macchine (1 e 2: macchine in serie e parallelo rispettivamente;
curve tratteggiate indicano reostato di avviamento, curve continue indebolimento di campo).
4. Mezzi di trazione a Frazionatore3
4.1. Il funzionamento ideale del frazionatore
Il frazionatore è un dispositivo in grado di modificare i due parametri (tensione e corrente) della
potenza in DC, mantenendo sostanzialmente invariata (a meno delle perdite) la potenza. Per queste
sue caratteristiche il frazionatore (o chopper con terminologia anglosassone) si configura come
l’equivalente del trasformatore, ma in DC.
Per l’analisi del frazionatore adottiamo le seguenti convenzioni:
assumiamo come primario (pedice 1) il lato a tensione più elevata, come secondario (pedice 2)
il lato a tensione più bassa
ipotizziamo un generatore di tensione ideale sul primario e di corrente ideale sul secondario
utilizziamo le grandezze minuscole (es. u, i) per rappresentare tensioni e correnti variabili nel
tempo, grandezze maiuscole (es. U, I) per rappresentare i rispettivi valori medi.
Pertanto, u1 trascurando le perdite nel frazionatore, si può dire che il frazionatore realizza una
variazione di tensione e corrente fra primario e secondario tale da verificare l’uguaglianza (indicando con i simboli soprasegnati i valori medi):
u1 i1 u2 i2 ovvero: U1 I1 U 2 I 2
3
Detto spesso, con terminologia anglosassone, Chopper.
Elementi di propulsione di veicoli a pantografo, pag. 11
Il frazionatore viene spesso rappresentato con una simbologia generica che non riporta i dettagli
realizzativi interni, come in figura 12.
i1
I1
i2
u1
I2
U1
u2
U2
a)
b)
Fig. 12: Rappresentazione di frazionatore con indicazione delle grandezze ai morsetti:
a) con rappresentazione delle grandezze istantanee b) con rappresentazione dei valori medi delle
grandezze
(se U1>0, I1>0, U2>0, I2>0 e U1>U2 si tratta di frazionatore abbassatore).
La realizzazione fisica di un frazionatore è abbastanza agevole, e richiede la presenza, sostanzialmente, di un interruttore pilotato in apertura e chiusura e un diodo. Schemi di principio raffiguranti frazionatori abbassatore, elevatore, e abbassatore - elevatore, sono mostrati nella fig. 13.
Nelle figure il frazionatore vero e proprio è individuato a messo di un rettangolo tratteggiato. E’
evidente che, nelle ovvie ipotesi di U1>0, I1>0, U2>0, I2>0, e ipotizzando inoltre U1>U2 (condizione suggerita anche dalla scelta grafica di riportare in figura la parte sinistra del circuito più alta di
quella destra) si ha che la potenza fluisce dal primario al secondario, ovvero dal secondario al primario rispettivamente nei casi di frazionatore abbassatore ed elevatore.
i1
i1
V
+
+
U1
I2
U1
+
I2
V
u2
-
+
u2
-
Fraziona tore e le vatore
Fraziona tore abbassa tore
V1
D1
I2 >0: Fra z. abbassatore
+
U1
V2
D2
I2
I2 <0: Fra z. ele vato re
+
u2
-
Fig. 13: Frazionatore abbassatore, elevatore, abbassatore - elevatore (si ipotizza U1>U2=u2)
Come si vede dalle figure, analizziamo il funzionamento del frazionatore nelle seguenti ipotesi
semplificative:
Elementi di propulsione di veicoli a pantografo, pag. 12
tensione primaria constante
corrente secondaria costante.
Per comprendere come operi il frazionatore, seppur in queste condizioni estremamente idealizzate, si consideri, per fissare le idee, un frazionatore abbassatore. Esso viene fatto funzionare aprendo e chiudendo l’interruttore pilotato V in maniera regolare, alternando intervalli in cui esso è
chiuso ad intervalli in cui esso è aperto, secondo lo schema desumibile dalla fig. 14.
I2=I
U1=U
i1
u2
U2=cU1
I1=cI2
Tc
Ti
T=Tc+Ti
t
Tc
T=Tc+Ti
Ti
I2=I
t
U1=U
i1
u2
U2=iU1
I1=iI2
Ti
Tc
a:
frazionatore
abbassatore
T=Tc+Ti
t
Tc= tempo di conduzione
c=Tc/T=indice di conduzione
Ti
T=Tc+Ti
Tc
b:
frazionatore
elevatore
t
Ti= tempo di interdizione
i=Ti /T=indice di interdizione
T=Tc+Ti
c+i=1
Fig. 14: Principio di funzionamento di frazionatore abbassatore ed elevatore.
Come si vede risulta possibile definire il parametro indice di conduzione c , in funzione del quale vengono variati il valor medio della corrente I1 e della tensione U2. Ovviamente, essendo nel
funzionamento idealizzato il frazionatore privo di perdite, sarà sempre
U1I1=U2I2.
Infatti si ha: U 1 T u dt 1 T U cU e I 1
1
2
2
c 1
1
T
T 0
T
da cui la (4).
(4)
T
0
i1dt
1
Tc I 2 cI 2 ,
T
Non è difficile convincersi che le equazioni testé riportate e gli andamenti raffigurati in fig. 14
restano invariati anche nel caso del frazionatore elevatore, operando sull’interruttore pilotato in esso presente, se si utilizzano per le correnti i versi di riferimento riportati in fig. 13 in corrispondenza di questo tipo di frazionatore: basterà semplicemente sostituire l’indice di conduzione c con
l’indice di interdizione i=Ti/T.
Per quanto riguarda il funzionamento del frazionatore abbassatore - elevatore, è sufficiente considerare che:
nel funzionamento come abbassatore l’interruttore pilotato V2 è mantenuto aperto, e, essendo per
ipotesi U1>U2 anche il diodo D1 è sempre in interdizione; pertanto lo schema che opera è formalmente identico a quello di un frazionatore abbassatore;
nel funzionamento come elevatore l’interruttore pilotato V 1 è mantenuto aperto, e, essendo per
ipotesi U1>U2 anche il diodo D 2 è sempre in interdizione; pertanto lo schema che opera è formalmente identico a quello di un frazionatore elevatore.
Elementi di propulsione di veicoli a pantografo, pag. 13
4.2. Frazionatore alimentante macchina a collettore
Nel caso di alimentazione di macchina in corrente continua il frazionatore si trova a dover alimentare un carico che può essere schematizzato da una f.e.m. in serie con una R-L. La costante di
tempo L/R è molto più grande del periodo del frazionatore T.
I due casi di frazionatore abbassatore ed elevatore sono rappresentati nella fig. 15.
i1
i1
L
R
+
U1
+
U1
- uL + +
i2
+
E
u2
L
R
+
-
i2
- uL +
+
uL L
u2
E
-
-
di2
dt
Fig. 15: Schemi per l’analisi del funzionamento di frazionatore alimentante macchina a collettore.
Le forme d’onda sono questa volta, per entrambi gli schemi, del tipo rappresentato nella fig. 16.
i2
u1=U
i1
u2
I1=cI2
Tc
Ti
T=Tc+Ti
U2=cU1
Tc
t
Ti
T=Tc+Ti
i2
a:
frazionatore
abbassatore
t
u1=U
u2
i1
I1=iI2
U2=iU
1
Ti
Tc
T=Tc+Ti
Ti
t
Tc= tempo di conduzione
c=Tc/T=indice di conduzione
Tc
T=Tc+Ti
b:
frazionatore
elevatore
t
Ti= tempo di interdizione
i=Ti /T=indice di interdizione
T=Tc+Ti
c+i=1
Fig. 16: Forme d’onda relative agli schemi riportati in fig. 15.
E’ ovviamente:
Frazionatore abbassatore
E u2 Ri2 uL
Frazionatore elevatore
E u2 Ri2 uL
Specializzando queste equazioni nelle due condizioni di conduzione ed interdizione, si ha:
conduzione
Frazionatore abbassatore
E U1 Ri2 uL
Frazionatore elevatore
E 0 Ri2 u L
interdizione
E 0 Ri2 uL
E U1 Ri2 u L
Di conseguenza:
quando siamo in conduzione la corrente cresce e si genera quindi una vL negativa in modulo pari
(a meno della caduta su R) a U1-E nel caso del frazionatore abbassatore, a E nel caso dell’elevatore;
Elementi di propulsione di veicoli a pantografo, pag. 14
quando siamo in interdizione la corrente decresce e si genera quindi una uL positiva in valore
pari (a meno della caduta su R) a E nel caso del frazionatore abbassatore, a U1-E nel caso
dell’elevatore.
4.2.1. Limiti della regolazione
Nella pratica, la limitata velocità di commutazione delle valvole fa sì che non sia possibile sfruttare interamente il campo 0-1 teoricamente ammissibile per gli indici i e c. In particolare, data una
certa valvola, risultano determinati i due tempi:
Tcmin detto tempo di conduzione minimo
Timin detto tempo di interdizione minimo.
Per i frazionatori di grande potenza, del tipo di quelli usati a bordo dei locomotori ferroviari,
questi tempi sono dell’ordine di 100-300 s. Di conseguenza si hanno i corrispondenti limiti sulla
parzializzazione:
cmin=Tcmin/T=f Tcmin=1-imax
cmax=1-Timin/T=1-f Timin=1-imin
Inoltre deve essere evidentemente T>>Tcmin, T>>Timin; pertanto si usano a bordo di locomotori
ferroviari frequenze di parzializzazione non particolarmente elevate (valori usuali sono compresi
fra 300 e 1000 Hz).
4.3. Utilizzo del frazionatore in azionamenti con motore in corrente continua
Vediamo come l’utilizzo del frazionatore consente di realizzare ampi campi di regolazione della
velocità angolare dei motore a collettore senza dover predisporre resistori di avviamento, nonché di
effettuare indebolimento di campo in maniera continua anziché discreta.
Si consideri la configurazione riportata in fig. 17, e la si analizzi con le equazioni fondamentali
della macchina in corrente continua riportate nel par. 3.2:
C kI
U E RI k RI
(1)
Come si vede sono presenti un frazionatore per la regolazione della tensione di alimentazione
dell’armatura della macchina in corrente continua, ed un secondo frazionatore, ovviamente di potenza molto minore, per l’alimentazione del circuito di eccitazione.
U
M
Fig. 17: Schema di azionamento macchina in corrente continua
con controllo elettronico dell’alimentazione e dell’indebolimento di campo.
Esso rappresenta la versione moderna del classico sistema denominato “Ward-Leonard”, che si
riporta, solo per ragioni di curiosità storica, in fig. 6.18.
Elementi di propulsione di veicoli a pantografo, pag. 15
G
M
M
Uecc
U ecc
Fig. 6.18: Schema tradizionale di azionamento Ward-Leonard.
Dalla (1) si deduce che sono possibili per essa i seguenti funzionamenti (cfr. fig.19):
funzionamento a flusso di eccitazione costante (tensione crescente). Tenendo conto che la corrente di armatura ha un limite massimo Imax, nel funzionamento a flusso costante la coppia massima erogabile dalla macchina vale Tmax k I max , e quindi la potenza massima è linearmente
crescente con la velocità angolare; anche la tensione cresce in maniera lineare con la velocità
angolare;
funzionamento a flusso di eccitazione decrescente (tensione costante). Evidentemente la tensione della macchina non può crescere indefinitamente. Pertanto oltre una certa velocità, detta “velocità base”, ulteriori aumenti della velocità angolare sono possibili solo riducendo il flusso di
eccitazione, in maniera da mantenere costante la tensione ai morsetti, supposta pari alla forza
controelettromotrice. In tal caso la massima potenza che la macchina è in grado di fornire è costante, essendo pari al prodotto UmaxImax.
flusso
tensione k
a)
base
coppia max
potenza max
b)
base
Fig.6.19: Curve di funzionamento operative (a) e limite (b) di un motore in corrente continua.
Per ottenere il funzionamento a flusso costante, nello schema di fig. 17 è sufficiente mantenere
costante l’eccitazione del motore in corrente continua (mantenendo quindi costante l’indice di conduzione del frazionatore sull’eccitazione) e modificare linearmente con la velocità la tensione di
alimentazione del motore, in modo che la differenza fra la tensione di alimentazione e la forza contro elettromotrice, che cresce proporzionalmente alla velocità si mantenga costante. Ad es. per ottenere le massime prestazioni dovrà essere verificata la relazione:
U E U K RI max cost
Per mantenere la costanza della caduta, U dovrà crescere di pari passo con E, quindi proporzionalmente (essendo il flusso costante) con .
Per ottenere il funzionamento a tensione costante, invece, occorrerà mantenere costante la tensione di alimentazione di armatura l’eccitazione della dinamo e diminuire progressivamente, agendo sull’indice di conduzione del relativo frazionatore, la tensione di alimentazione del circuito di
Elementi di propulsione di veicoli a pantografo, pag. 16
eccitazione. In questo caso la velocità aumenterà come conseguenza di retta della
U EK cost
Riducendosi infatti , dovrà necessariamente e progressivamente aumentare.
Il controllo dell’azionamento con frazionatore si a sull’armatura che sul campo è riassunto nella
fig. 20, ove il relativo loop di regolazione è particolarmente semplificato, e ha il solo scopo di illustrare i principi fondamentali. Gli indici di conduzione dei due frazionatori abbassatori di armatura
e di campo sono indicati rispettivamente con ia e ic. Ovviamente sarà Ua=iaU0, Uc=icU0,
Ic=icU0/Rc.(essendo Ic la corrente circolante nel circuito di campo).
T
max
T= coppia
ia =1
Curva della
massima
prestazione
Tmax
T*
ia ,
U
,P
ia, U, P
base
max
max
Umax 1
k
1
k
I*
+
Imax
k
Rc
Regolat.
ia
ic
Sistema
I
-
Fig. 20: Caratteristica meccanica alla massima corrente
di macchina in corrente continua controllata elettronicamente
La parte alta del diagramma di regolazione mostra la logica di determinazione del flusso, il quale viene mantenuto al più alto valore compatibilmente con la necessità di limitare la tensione di
macchina al di sotto di un valore limite. Lo schema in questa parte per semplicità considera assimilabili la forza controelettromotrice E e la tensione ai morsetti della macchina U=E+RI.
Il flusso così determinato dà la costante di conversione della richiesta ci coppia T* in termini di
corrente di armatura desiderata. Tale corrente è ovviamente sottoposta anche alla limitazione del
valore massimo, la quale interverrà per valori progressivamente più bassi man mano che la velocità
aumenta, conformemente con il diagramma mostrato nella parte sinistra della medesima figura.
La corrente I* è il riferimento del regolatore principale della macchina, che opera sull’indice di
conduzione del chopper di armatura, mentre il calore desiderato del campo determina l’indice di
conduzione ic del frazionatore di campo.
Si può osservare che con il controllo considerato la regolazione della coppia è affidata alla corrente di armatura, mentre il chopper di campo si occupa solo del mantenimento del valore adeguato
di flusso.
Questo è congruente con la formula fondamentale
T k I
tenendo conto che per ottenere un dato prodotto I è vantaggioso mantenere alto il flusso piuttosto che la corrente di armatura, visto che la corrente di campo è sempre molto minore di
quest’ultima.
m
5. Mezzi di trazione con azionamenti asincroni trifasi
5.1. Introduzione
Negli ultimi anni si è assistito ad un progressivo aumento di competitività dei dispositivi di elettronica di potenza dovuto sia ad un loro aumento di prestazioni e di affidabilità, che, anche, ad una
riduzione di costo. Sono quindi diventate sempre più convenienti configurazioni degli azionamenti
Elementi di propulsione di veicoli a pantografo, pag. 17
dei locomotori elettrici contenenti molte e complesse conversioni del vettore elettrico.
In particolare si è assistito, soprattutto a partire dagli anni ’80, ad un crescente utilizzo di azionamenti trifasi a frequenza variabile.
Come è noto le macchine elettriche trifasi (sincrona e asincrona) presentano notevoli vantaggi
rispetto alle macchine a collettore in termini di potenza specifica, manutenzione, vita4. Queste caratteristiche fortemente favorevoli possono essere vantaggiosamente sfruttate in azionamenti che
prevedono, qualunque sia il sistema adottato per la linea di contatto, uno stadio in c.c. a partire dal
quale, tramite inverter, si effettua la generazione di un sistema trifase di alimentazione di motori
trifasi (sincroni o asincroni a seconda delle scelte progettuali) a frequenza variabile.
5.2. Richiami del funzionamento della macchina asincrona a tensione e frequenza
costante
Prima di analizzare il funzionamento della macchina asincrona a frequenza variabile si richiama
rapidamente un circuito equivalente della macchina asincrona, molto semplificato ma adatto per i
nostri scopi.
Il circuito è rappresentato in fig. 21, nel quale, evidenX
R1
temente, si sono trascurate le ammettenze trasversali. La X
include le reattanze di dispersione rotorica e statorica.
E’ evidenziata la tensione U a valle della resistenza sta+
+
torica, pari con buona approssimazione (salvo che alle veR2 /s locità di rotazione più basse) alla tensione ai morsetti della
U
Ual
macchina. La potenza Pt che attraversa il traferro e viene
trasferita al rotore può essere ottenuta tramite la relativa
potenza nel circuito riportato:
R
R
U2
U 2 R2 s
Pt
3
Pag 3 2 I 2 3 2 2
s
s X R22 / s 2
s 2 X 2 R22
Fig.21: Schema semplificato della
macchina asincrona.
Pag
3 U 2 R2 s
Tag
(Pt=potenza che attraversa il traferro)
0 0 s 2 X 2 R22
in cui si sono indicate con Tag e Pag coppia e potenza al traferro, e con 0 la velocità angolare al
sincronismo della macchina, e con s=(0-)/0 il cosiddetto scorrimento della macchina.
Sono di particolare rilevanza la coppia allo spunto Ts (per s=1) e il massimo della coppia al variare dello scorrimento (che si ha per s=R2/X, come si vede annullando la derivata di Tag). Sostituendo si ottengono rispettivamente per queste coppie rispettivamente i valori:
U ll2
3 U 2 R2
3 U 2 R2 U ll2 R2
3U 2
Ts
T
max
0 X 2 R22 0 Z 2
0 Z 2
2 0 X 2 0 X
Avendo indicato con il simbolo Ull la tensione concatenata (line-to-line). Parte della potenza al
traferro è dissipata nelle perdite elettriche di rotore; se tali perdite si indicano con P2j e si indica con
Pm la potenza meccanica disponibile al rotore, si ha:
Pm C t Pt P2 j
Questa potenza è in parte dissipata in perdite meccaniche (attrito e ventilazione), in parte rimane
disponibile come potenza meccanica utile Pu:
Pu C u Pm Pjmecc
L’andamento con macchina alimentata a valle di R1 a tensione e frequenza costante (Ual=cost,
4
come già osservato nel presente corso questi aspetti favorevoli hanno determinato nei primi decenni del secolo un notevole sviluppo, specialmente in Italia, dei sistemi di trazione ad alimentazione trifase e frequenza industriale.
Peraltro questo tipo di sistema presentava due formidabili inconvenienti: la complessità delle linee di contatto per l’alimentazione trifase ed una elevata rigidità della caratteristica meccanica (conseguenza dell’alimentazione a frequenza fissa), tali da
determinare verso la metà del secolo la scomparsa di questa soluzione.
Elementi di propulsione di veicoli a pantografo, pag. 18
0=cost) della coppia al traferro Ct, assimilabile alla coppia Cu se si trascurano le perdite meccaniche, può essere tracciato a partire dalla espressione di Ct sopra riportata, ed è del tipo raffigurato in
fig. 22, nella quale si consideri una qualunque delle curve riportate, ad esempio quella riportata con
tratto più spesso. Tale andamento, seppur in via approssimativa, è valido anche nel caso di alimentazione con Ualcostante in considerazione del fatto che si può assumere UUal.
T
0
Fig. 22: Esempio di caratteristica meccanica di macchina asincrona
alimentata a tensione e frequenza costanti
La caratteristica meccanica riportata in fig. 22 è una curva di punti di equilibrio, tracciata
nell’ipotesi di regime simmetrico ed equilibrato della macchina. Essa non è quindi utilizzabile per
valutare cosa succede durante i transitori, ad esempio durante l’avviamento di una macchina.
La fig. 23 mostra ad esempio l’andamento della coppia (espressa in per unità della coppia nominale) in funzione del tempo durante l’avviamento di una macchina sincrona simulata con un modello accurato. Si nota come l’andamento si discosti da quello di equilibrio in particolare durante i
primi istanti in cui l’effetto del transitorio delle correnti è maggiormente sentito.
Infatti in questo caso il regime delle correnti non si è ancora attestato in modo da avere una terna di correnti sinusoidali equispaziate, e quindi il campo dovuto alle correnti statoriche è molto differente dal campo rotante che si avrebbe nel caso di regime simmetrico, il quale, a sua volta, comporterebbe andamenti di coppia privi delle oscillazioni qui visualizzate.
La coppia resistente applicata alla macchina in questo esempio è costantemente pari a 0,5 p.u.
(cioè il 50% del valore nominale),
3
Cem(p.u.)
2
1
0
-1
-2
0
1
2
3
4
t (s)
5
6
7
8
Fig. 23: Coppia elettromagnetica durante un avviamento
di macchina alimentata a tensione e frequenza costanti.
Nonostante questo, è istruttivo valutare dal semplice circuito equivalente sopra riportato e dalle
relative equazioni alcuni parametri di funzionamento della macchina anche a distanza dalla velocità di sincronismo.
Si può ad esempio osservare come, per bassi valori dello scorrimento, il circuito sia prevalentemente induttivo: le resistenze statoriche e rotoriche sono infatti, per costruzione, molto piccole rispetto alle relative reattanze di dispersione. Si osserva inoltre che l’impedenza vista dall’alimenElementi di propulsione di veicoli a pantografo, pag. 19
tazione con scorrimenti prossimo all’unità sia molto alta, tipicamente di circa 6 volte il valore della
corrente nominale della macchina.
La fig. 24 mostra gli andamenti di corrente e potenze (attiva, reattiva, apparente, relative al medesimo avviamento della medesima macchina la cui coppia elettromagnetica è stata già mostrata in
fig. 23.
4
6
x 10
100
P (W)
S (VA)
5
50
Istat(A)
4
0
3
-50
2
1
-100
0
1
2
3
4
t (s)
5
6
7
0
8
0
1
2
3
4
t(s)
5
6
7
8
Fig. 24 Correnti statoriche (SX) e potenze attiva e apparente (DX) assorbite dalla macchina asincrona
durante il medesimo avviamento da cui è tratta la fig. 23.
Se ne trae la conclusione, peraltro ben nota, che la macchina asincrona a tensione e frequenza
costante funziona bene (a buoni valori di efficienze e di fattore di potenza, e con buone coppie elettromagnetiche) soltanto in prossimità del sincronismo, mentre le altre zone di funzionamento possono essere usate soltanto durante la breve durata del transitorio di avviamento, durante il quale,
comunque, si hanno alte correnti, bassi fattori di potenza e base coppie elettromagnetiche.
5.3. Funzionamento a flusso costante
Si supponga ora di alimentare la macchina in modo che si abbia una tensione U proporzionale
alla frequenza di alimentazione:
E U
cost => U Kf
f
f
Posto 0=2f/p=kf , con p numero di coppie polari della macchina, e s=/0, si ha:
Pag
U 2 R2 / 0
K 2 / k 2 R2
3
3 K 2 f 2 R2
3
Tu Tag
0 0 ( / 0 p0 L) 2 R22 02 ( pL ) 2 R22
( pL) 2 R22
Si vede che con U proporzionale a f a parità di Tag non dipende dalla frequenza di alimentazione, facendo variare si descrive sempre la stessa curva Tag() qualunque sia la frequenza di
alimentazione. In tal modo si generano caratteristiche meccaniche aventi ugual valore della coppa
massima e ottenibili l’una dall’altra attraverso una traslazione rigida orizzontale (fig. 25).
2f/p
f1 < f 2< f 3
T
f1
f2
f3
Tres + J
Tres
0
Fig. 25: Caratteristiche meccaniche di motore asincrono alimentato a frequenza variabile.
Elementi di propulsione di veicoli a pantografo, pag. 20
Si osserva che la velocità con cui ci si sposta fra le varie caratteristiche meccaniche, ad es. da f1
a f2 e poi a f3, può essere scelta ad arbitrio in funzione delle esigenze del controllo, e determina
l’accelerazione del veicolo. Di norma si sceglie di far funzionare il motore, durante il funzionamento a flusso costante, anche a coppia costante (ad es. con T=Tmax/2, cfr. fig. 25), per cui durante questo tipo di funzionamento la potenza erogata dal motore risulta proporzionale alla frequenza di alimentazione, e quindi anche alla velocità del veicolo.
La tensione U di figura 21 (a meno del modesto effetto dei flussi dispersi statorici) è sostanzialmente correlata al flusso (combinato statorico e rotorico) rotante nella macchina secondo la relazione:
, U E 2 f
U E j
Di conseguenza il funzionamento a tensione proporzionale alla frequenza ( U Kf ) è detto anche a flusso costante.
Alle basse velocità di rotazione della macchina, cui corrispondono basse frequenze di alimentazione la differenza fra la tensione di alimentazione Ufd e la tensione che sostiene il campo U è considerevole. Essendo la corrente assorbita dalla macchina durante l’azionamento a frequenza variabile considerato sostanzialmente in fase con la tensione e costante, si può stabilire la relazione fra
numeri reali:
U fd U R1 I
Imponendo la proporzionalità di U con f si ha:
U fd U 0 (U n U 0 ) f / f n
(con U0=R1I)
(5)
Valutiamo ora cosa succeda della corrente e della potenza reattiva assorbita dalla macchina per
valori di velocità angolare diverse da quella nominale, al fine di effettuare un confronto con quanto
accade con la macchina alimentata a tensione e frequenza costanti.
Imponendo, al solito U Kf , 0=2f/p=kf, è:
I
K 2 f 2 2 / 02
U2
K 2 f 2 s2
( K / k )2 2
cost
X 2 R22 / s 2 s 2 X 2 R22 2 / 02 p 2 02 L2 R22 2 p 2 L2 R22
La corrente non dipende quindi dal valore di 0, In particolare durante l’avviamento con il controllo a U/f=cost e =cost la corrente di regime, valutata sul circuito rimane constante, al pari della coppia elettromagnetica.
Anche per quanto riguarda gli adsorbimenti di potenza reattiva la situazione è molto migliorata
rispetto al caso di alimentazione a tensione e frequenza costanti, in quanto alle basse velocità il fattore di potenza si mantiene costante e simile a quello di regime:
tan
p 0 L / 0 pL 0
X
cost
R2 / s
R2
R2
Come per il caso di alimentazione a tensione e frequenza costante verifichiamo i risultati ottenuti con i risultati di una simulazione numerica effettuata su modello accurato della macchina asincrona.
L’alimentazione della macchina è effettuata con tensione che segue la logica dell’equazione (5),
e frequenza determinata dalla condizione =cost=A, così implementata:
0 min( A m , regime )
essendo:
p0 la pulsazione delle tensioni di alimentazione della macchina
Elementi di propulsione di veicoli a pantografo, pag. 21
m la velocità angolare del rotore della macchina
La fig. 26 mostra le tensioni di alimentazione e gli andamenti di m e 0.
400
1.2
1
200
Va
Vb
Vc
Wm
Wm0
0.6
v (V)
(p.u.)
0.8
0
0.4
0.2
-200
0
-0.2
-400
0
1
2
3
4
t (s)
5
6
7
8
0
1
2
3
4
t (x)
5
6
7
8
Fig. 26: Velocità angolari (SX) e tensioni (DX) di azionamento a frequenza e tensioni variabili).
La fig. 27 riporta l’andamento della coppia elettromagnetica generata.
Sebbene la coppia non sia costante durante l’avviamento, come invece risultava dall’analisi circuito, (sempre per il fatto che il circuito è ricavato con considerazioni statiche mentre l’avviamento
è un fenomeno dinamico) le oscillazioni di coppia sono ridotte di entità, frequenza e durata rispetto
al caso di alimentazione a tensione e frequenza costanti. Durante l’avviamento la presenza di un
valore di superiore a quello che corrisponde a regime all’erogazione di una coppia elettromagnetica pari a 0,5 p.u si ha una coppia elettromagnetica ampiamente superiore a quella resistente,
che consente un’adeguata accelerazione angolare. Quando poi la velocità si approssima a quella di
regime, la coppia rapidamente si porta al valore necessario a regime.
Con i parametri adottati per il controllo l’avviamento ha durata simile a quella della fig. 23, in
quanto la coppia media è simile.
2.5
2
C (p.u.)
1.5
1
0.5
0
0
1
2
3
4
t (s)
5
6
7
8
Fig. 27: Andamento della coppia elettromagnetica generata in azionamento
a frequenza e tensione variabili.
Uno dei grandi vantaggio dell’azionamento a frequenza e tensione variabile consiste nel limitare, a parità di coppia generata, la corrente assorbita dalla rete, e quindi di consentire il funzionamento per tempi lunghi o anche continuativo, della macchina, in punti di lavoro lontani dalla velocità angolare di sincronismo relativa all’alimentazione a frequenza costante.
la fig. 28 mostra, per raffronto con il caso precedente, gli andamenti di correnti e potenze assorbite ottenuti.
Elementi di propulsione di veicoli a pantografo, pag. 22
40
30
20
Istat (A)
10
0
-10
-20
-30
-40
0
1
2
3
4
t (s)
5
6
7
8
14000
P (W)
S (VA)
12000
P, S (var)
10000
8000
6000
4000
2000
0
0
1
2
3
4
t (s)
5
6
7
8
Fig. 28: Correnti statoriche (SX) e potenze attiva e apparente (DX) assorbite dalla macchina asincrona
durante il medesimo avviamento da cui è tratta la fig. 27.
Come si vede, pur con avviamento di durata paragonabile al caso a tensione e frequenza costanti, le correnti assorbite sono molto più modeste, e quindi compatibili con un uso continuativo dei
punti di lavoro alle varie velocità della macchina. Lo stesso risultato, per altra via, si ottiene
dall’analisi della potenza apparente assorbita dalla macchina.
Come si è visto dall’analisi del circuito equivalente, la coppia elettromagnetica che la macchina
genera à determinata dal valore di che si sceglie, e quindi tramite la selezione di questo valore
si possono scegliere sia il punto di lavoro stazionario dell’azionamento che le evoluzioni dei transitori. Nell’avviamento discusso nelle precedenti figure la corrente durante l’avviamento è stata scelta in 1,3 p.u del valore nominale con il che si è generata una coppia pari ancora al 1,3 p.u. del valore nominale. Avviamenti più rapidi, o meno rapidi, sarebbero stati ottenibili semplicemente incrementando o riducendo il valore di .
Un diagramma di illustrante il modo di attuare una logica che consenta, a flusso costante, di applicare al carico la coppia desiderata, è mostrato in fig. 29. Con questa logica sono stati ottenuti gli
andamenti temporali illustrati nella fig. 28.
Elementi di propulsione di veicoli a pantografo, pag. 23
f*
0ss
ˆ
T*
0
+
+
meas
Saturation
f*
p
2
U*
U=kf*+RsI*
0ss
I*
meas
f*
U*
M
Supply
system
T,
mechanical
load
3
tachometer
Fig. 29: Logica per il controllo a flusso costante.
(essa è stata utilizzta per ottenere gli andamenti di fig. 28)
Anche in questo caso, come per la macchina in corrente continua, nel diagramma mostrato non
si effettua un controllo in retroazione sulla coppia richiesta T*. Per la fig. 29. valgono quindi le
considerazioni già svolte per la fig. 20, e la relativa figura 7.
5.4.
Funzionamento a flusso variabile
T, P
P
Tres + J
Tres
base
Fig. 30: Funzionamento di azionamento trifase asincrono a flusso costante e variabile.
Durante il funzionamento a flusso costante discusso nel precedente paragrafo la tensione cresce
in proporzione alla frequenza di alimentazione, nonché alla velocità del veicolo. Ad un certo punto
si raggiungerà la tensione massima ammissibile. A questo punto si potrebbe pensare di aver raggiunto la velocità massima del veicolo. In realtà questo risulta inopportuno, in quanto la grande rapidità di regolazione consente di raggiungere velocità superiori, pur non incrementando ulteriormente la tensione né la potenza erogata, riducendo il rapporto fra coppia effettiva e coppia massima. In tal caso il funzionamento risulta del tipo schematicamente indicato nella fig. 30. Per ottenere
la condizione di potenza costante si fa in modo che la coppia abbia andamento iperbolico:
1/ .
T Tres J
Il fatto che a destra della velocità base si operi a tensione costante implica che:
E U
1/ ,
f
f
mentre il luogo dei valori massimi delle curve di coppia, proporzionali 2, presenta ovviamente un
andamento del tipo 1/2.
Elementi di propulsione di veicoli a pantografo, pag. 24
Nella medesima figura è riportato anche l’andamento qualitativo della potenza dell’azionamento.
La tecnica di avvicinare oltre base la coppia di funzionamento a quella massima consente rapporti max/base limitati. Per aumentare questo rapporto si può scegliere di incominciare a deflussare la macchina quando ancora la tensione non ha raggiunto il suo massimo, e ottenere una riduzione di flusso più graduale combinando l’aumento di
frequenza di alimentazione con un aumento di tensione ovvero combinando le tecniche di avvicinamento del punto
di lavoro alla coppia massima con quella dell’aumento della tensione di alimentazione.
Elementi di propulsione di veicoli a pantografo, pag. 25
6. Mezzi di trazione con azionamenti sincroni trifasi
6.1. Richiami del funzionamento della macchina sincrona isotropa e anisotropa
Le macchine sincrone, come è noto, sono ampiamente utilizzate come alternatori sia nelle grandi
centrali che nei più piccoli gruppi elettrogeni.
Si tratta di macchine sincrone in cui il campo di eccitazione, sul rotore, è prodotto attraverso un
circuito alimentato in corrente continua, la quale è trasferita al rotore attraverso un accoppiamento
spazzole-anelli (sistemi con eccitatrice statica, fig. 31) o direttamente prodotta sul rotore (sistema
con eccitatrice brushless, fig. 32).
ae
Motore
primo
G
3
s
rc
+
Um
RT
ae: avvolgimento di eccitazione
s: spazzole
rc: raddrizzatore cont rollato
: angolo di controllo
RT: regolatore di tensione
U*
Fig. 31: Schema di funzionamento di generatore sincrono con eccitazione statica.
G
3
parte rotante
ep
rd
U*
Um
RT
GA
ea
ep: avvolgim. di eccitazione principale
ea: avvolgim. di eccitazione ausiliario
rc: raddrizzatore controllato
rd: raddrizzatore a diodi rotanti
RT: regolatore di tensione
GA: Alternatore ausiliario
rc
3
Fig. 32: Schema di funzionamento di generatore sincrono con eccitazione brushless
Per applicazioni propulsive, peraltro, è in atto una decisa tendenza ad utilizzare macchine sincrone aventi sul rotore dei magneti permanenti, che generano un flusso rotorico costante, senza necessità di fornire alimentazione esterna in corrente continua. In questo tipo di macchine allo svantaggio di non poter modulare il flusso di eccitazione si contrappone il vantaggio della semplicità
costruttiva e della resistenza meccanica, che per applicazioni propulsive, quanto meno di veicoli
stradali, risultano prevalere.
Nella fig. 33 sono riportati i rotori di due macchine sincrone a magneti permanenti, secondo le due
configurazioni correntemente utilizzate.
In entrambe le configurazioni le frecce a disposizione radiale indicano il verso del flusso magnetico
generato, nel senso che la punta della freccia indica la polarità nord del magnete. Inoltre è da considerare che le zone rotoriche nelle quali sono disposti i magneti, nonché le fessure che nella configurazione (a) sono presenti, si comportano come materiale non magnetico. cioè a permeabilità magnetica unitaria. Il resto del rotore è di materiale magnetico (lega ferro carbonio o simile) laminato.
Elementi di propulsione di veicoli a pantografo, pag. 26
Materiale
ferromagnetico
(c)
Fig. 33 Configurazioni di macchine sincrone a magneti permanenti.
Le soluzioni riportate nella fig. 33 (a) e (b) sono magneticamente anisotrope, quindi con differente riluttanza del circuito magnetico di asse diretto e in quadratura, mentre quella riportata nella
fig. (c) è isotropa.
La configurazione isotropa è costruttivamente economica, ma non consente velocità molto elevate per via della tendenza dei magneti a staccarsi dal rotore, che nella configurazione della fig. (a)
è scongiurata per via della sua stessa realizzazione meccanica. La soluzione (b) è intermedia fra le
altre due in quanto da un lato presenta anisotropia magnetica, che può essere sfruttata nella progettazione della macchina per ottenere particolari caratteristiche, dall’altro è costruttivamente economica, e infine presenta gli stessi limiti di velocità dovuti alle forze d’inerzia della soluzione (c).
Analizziamo adesso il funzionamento della macchina sincrona nell’ipotesi di trascurare gli effetti dei flussi dispersi statorici.
Il funzionamento della macchina anisotropa è rappresentabile attraverso il diagramma vettoriale
riportato in fig. 34 (a), in cui tensione e corrente sono quelle circolante nella fase 1, e la corrente
I=I1 è considerata entrante nei morsetti della macchina, secondo lo schema riportato nella fig. 34
(b). Nel solo caso di isotropia, lo stesso comportamento può essere rappresentato dal circuito equivalente di fig. 34 (c), e dal relativo diagramma vettoriale (fig. 34 (d)).
U
XdId
I
Id
(a)
Iq
a. d
Ie
XqIq
+
U3
-
RaI
E0
I3
U1
(b)
T,
asse q
I1
+
+
+
Ue
U E 0 Ra I jX d Id jX q Iq
U E 0 Ra I jX s I
I
Ra
U
Xs
+
U
(c) -
jXsI
I
+
E0
a. d
(d)
RaI
E0
asse q
Fig. 34: Diagrammi vettoriali e schemi di motori sincroni
(Ue e Ie assenti nel caso di magneti permanenti).
Nelle seguenti due sezioni si effettua un’analisi della potenza e coppia massima erogabile dalla
macchina secondo le seguenti due ipotesi semplificative:
Elementi di propulsione di veicoli a pantografo, pag. 27
1) Si trascurano tutte le perdite di potenza e si considera l’anisotropia
2) Si considera la presenza della resistenza statorica e si trascura l’anisotropia
In entrambi i casi, come già detto, trascuriamo gli effetti dei flussi dispersi statorici.
Per effettuare questo tipo di analisi, si ricordi che i parametri della macchina variano al variare
della velocità angolare del rotore, in quanto con essa varia la pulsazione delle grandezze elettriche
, secondo la relazione: =p (essendo p il numero di coppie polari della macchina).
Di conseguenza:
X s La E PM
essendo PM il flusso concatenato prodotto dai magneti permanenti (valore efficace dell’onda di
induzione sinusoidale al traferro moltiplicata per numero di spire e fattore di avvolgimento). tale
flusso verrà spesso indicato per semplicità con il più compatto simbolo .
6.2.
Caratteristica meccanica limite (macchina anisotropa)
Elementi di propulsione di veicoli a pantografo, pag. 28
Consideriamo il diagramma vettoriale ricavato per la macchina sincrona anisotropa nel precedente
paragrafo (fig. 35).
jXdId
U
I
Id
Iq
asse d
alla generica velocità :
U E 0 jX d Id jX q Iq
jXqIq
Posto:
Id=-Isin, Iq=Icos
è:
U q ( PM Ld I d )
E
asse q
U d Lq I q
Posiz. vettori con Id<0
Fig. 35: Diagramma vettoriale del motore sincrono anisotropo
nel caso di trascurare gli effetti della resistenza di armatura.
Come si vede dalla figura il fasore della corrente I è scomposto in un componente Iq lungo
l’asse q ed un componente Id lungo l’asse d.
Le due componenti cartesiane di I lungo d e q saranno rispettivamente Id e Iq (naturalmente Id
sarà un numero negativo).
La potenza meccanica all’albero, considerato che stiamo trascurando tutte le perdite, è pari a
quella assorbita dalla rete elettrica, a meno del fattore 3 (dovuto al passaggio dal circuito equivalente all’intera macchina).
Essa può essere calcolata mediante le componenti sul piano di Gauss in cui si assuma d come
asse reale e q come asse immaginario:
Pm Pe 3 Re(UI * ) 3 Re (U d jU q )( I d jI q ) 3(U q I q U d I d )
Ma (Id=-Isin, Iq=Icos)
U q I q ( Ld I d ) I cos ( I cos Ld I 2 cos sin )
U d I d Lq I q I d Lq I 2 cos sin .
Pertanto:
Lq Ld 2
Pm 3(U q I q U d I d ) 3u I cos
I sin 2
2
(6)
e
Tm
Lq Ld 2
Pm
3 p I cos
I sin 2
2
(7)
La massima potenza meccanica erogabile si ha quando I=In, , e per il valore dell’angolo che
massimizza la (6).
Naturalmente, nel caso di macchina isotropa il secondo termine della (6) si annulla, e l’angolo di
massima erogazione della potenza è pari a 0, che corrisponde a campi prodotti dai magneti permanenti e dalle correnti statoriche ortogonali fra di loro.
Occorre però imporre anche che la tensione (di fase, valore efficace) ai morsetti della macchina
al variare della velocità angolare non superi un valore limite che può essere determinato dalla costruzione della macchina, o dell’inverter a cui esso è connessa, o addirittura dalla sorgente DC che
alimenta tale inverter. Questo in analogia con quanto già visto per le macchine in corrente continua
e asincrona trifase. Chiamiamo Un, tale valore.
Elementi di propulsione di veicoli a pantografo, pag. 29
Pertanto l’angolo va scelto in modo che massimizzi la (6), nel rispetto però della seguente
condizione al contorno:
U U d2 U q2 U n
n2 ( E0
(8)
X 0d I sin ) ( X 0 q I cos ) U n
2
2
2
Ovviamente alle basse velocità risulterà possibile utilizzare l’angolo che massimizzi incondizionatamente la (6), mentre alle velocità più elevate, occorrerà utilizzare un angolo che genera
una potenza inferiore al massimo ottenibile con la sola 6), per via del vincolo (8).
La massima coppia erogabile dalla macchina alle varie velocità è, ovviamente immediatamente
ricavabile dalla (6) dividendo per .
La fig. 36 mostra, a titolo di esempio, coppia e potenza erogabili nel caso di E0= 0,60Un,
Xd0=0,5Zn, Xq0=Zn5. Si osserva come con i parametri considerati la macchina è in grado di erogare
potenza costante per un ampio tratto, raggiungendo un’elasticità di circa 6, molto elevata, e difficilmente ottenibile con l’uso di macchine asincrone.
Per completezza la figura riporta, in verde, anche l’angolo gamma in radianti ottimale . Alle
basse velocità l’angolo ottimale è pari a 23 gradi= 0,40 rad.
1,5
(rad)
U/Un
1,0
P/(3UsI n)
0,5
0,5xT/Tmax
0,0
0
1
2
3
4
5
6
velocità base
Fig. 36: Esempio di caratteristica meccanica limite di macchina anisotropa
(E0= 0,60, Xd0=0,5, Xq0=1,0; tratteggiate le condizioni ideali di coppia e potenza costanti)
In un primo tratto delle curve la tensione sale linearmente con la velocità, mentre la coppia resta
costante e pari al valore massimo (quello che assume per velocità nulla), e il valore ottimale
dell’angolo è anch’esso costante. Questo tratto termina con il raggiungimento della tensione nominale, dopodiché la tensione deve attestarsi a tale valore e la coppia comincia a decrescere e
l’angolo ad aumentare. La potenza inizialmente cresce, raggiunge il valore massimo pari a 3UnIn
(in tale condizione i fasori della corrente In e della tensione ai morsetti Un sono allineati), e poi decresce.
Il confine fra il tratto iniziale a tensione crescente (e coppia costante) e il secondo tratto a tensione costante (e coppia decrescente è la cosiddetta velocità base.
Nell’esempio riportato tale valore è proprio pari ad 1, ma non sempre ciò accade, come verrà mostrato nel successivo esempio relativo alla della macchina isotropa.
La velocità base può essere numericamente determinata a partire dalla (8), considerata nel caso
limite in cui valga l’uguaglianza. In queste condizioni, è:
( E0 b L0 d I n sin ) 2 (b L0 q I n cos ) 2 U n
5
Essendo stato assunto, come usuale,
Zn Un / In
Elementi di propulsione di veicoli a pantografo, pag. 30
da cui si ricava agevolmente b.
Un’analisi di dettaglio di cosa accade nel funzionamento interno della macchina alle varie velocità, in modo da ottenere una spiegazione intuitiva dei diagrammi della fig. 36 è troppo complessa
per essere analizzata in questa sede. Un’analisi di questo tipo verrà però svolta nel seguente paragrafo per la macchina isotropa, in quanto essa si può svolgere in maniera molto più semplice.
6.3.
Caratteristica meccanica limite (macchina isotropa)
Consideriamo il diagramma vettoriale ricavato per la macchina sincrona isotropa nel paragrafo
5.2, con le relative equazioni espresse, come si è detto, in unità di misura pari ai valori nominali
della macchina stessa, in cui si trascurino per semplicità tutte le perdite energetiche, ed in particolare la perdita nelle resistenze statoriche (fig. 37).
U
I
I
juX0I
+
uE0
U
-
uE0
asse q
asse d
uX0
+
U u ( E 0 jX 0 I)
Fig. 37: Diagramma vettoriale del motore sincrono isotropo alla generica velocità .
La potenza meccanica all’albero, considerato che stiamo trascurando tutte le perdite, è pari a
quella assorbita dalla rete elettrica; quest’ultima può essere ricavata dalla (6) ponendo X0d=X0q=X0
oppure banalmente osservando che essa è pari alla potenza assorbita da E0, ottenendo:
Pm 3u E0 I cos
(9)
Siccome più alta è la corrente più alte sono le perdite nel rame, risulta auspicabile, fin che è possibile, mantenere a 0 l’angolo in modo da minimizzare la corrente a parità di potenza convertita
in meccanica.
Quindi i diagrammi vettoriali tenderanno ad essere del tipo di quelli rappresentati in fig. 38.
U’
’>
U
E0
asse d
I
j’X0I
jX0I
asse q
’E0
Fig. 38: Diagramma vettoriale di motore sincrono isotropo per basse velicità angolari.
Se, al crescere della velocità angolare, manteniamo costante la corrente, la (9) ci dice che la
coppia rimane costante. Se la corrente è pari al valore nominale (il valore massimo continuativo), la
coppia sarà pari a quella massima.
E’ evidente che al crescere della velocità angolare , e quindi della pulsazione elettrica =p,
la tensione di alimentazione U continua a crescere, e questo non può proseguire all’infinito. Si arriva evidentemente ad un punto in cui la tensione raggiunge il valore massimo ammissibile, che può
essere determinato dalla macchina stessa (che non può essere alimentata a tensioni eccessive per
via del superamento delle capacità di isolamento), oppure dal convertitore di alimentazione (il quale ha anch’esso dei limiti di funzionamento possibile).
Elementi di propulsione di veicoli a pantografo, pag. 31
Questa velocità angolare, che può essere definita come la massima velocità per la quale è possibile erogare la massima coppia, viene detta, in analogia con gli altri azionamenti, velocità base
dell’azionamento. La indicheremo con b.
Raggiunto Umax, (e quindi b) al crescere di l’angolo diventa superiore a 0 e la forma del
diagramma diviene del tipo di quello rappresentato nella fig. 37.
Ad esempio con velocità angolari pari al quadruplo della velocità base si ha un diagramma vettoriale del tipo di quello rappresentato in fig. 39.
Nel caso di velocità così elevate, occorrerà predisporre opportuni accorgimenti affinché la macchina non funzioni a vuoto, in quanto altrimenti si misurerebbe ai morsetti una tensione pari a
’E0, probabilmente tale da danneggiare il’inverter con cui la macchina è accoppiata.
’=4
U’n
Un
ju’X0I’
I’
juX0I
asse d
asse q
u’E0
uE0
I
Fig. 39: Diagramma vettoriale del motore sincrono isotropo per velocità molto grandi rispeto a base.
Oltre la velocità base, il campo statorico avrà una componente progressivamente crescente opposta a quello del rotore, in modo da deflussare la macchina, in modo ampiamente analogo a quanto accade nella macchina in corrente continua e asincrona.
La condizione di limitazione della tensione ai morsetti si può ricavare come caso particolare
dell’equazione generale della macchina anisotropa, la (8), oppure direttamente dal diagramma vettoriale della fig. 37 e applicando ad esso il teorema di Carnot sui triangoli generici per legare E0, Un
e X0I, ottenendo:
U Un
(10)
u2 ( E02 X 02 I 2 2 E0 X 0 I sin ) U n2
La fig. 40 mostra, a titolo di esempio, coppia e potenza erogabili nel caso di E0= 0,65Un,
X0=0,50Un/In, cioè una macchina isotropa di pari magneti e con reattanza su asse diretto e quadratura intermedia a quelle rispetto a cui era stata tracciata la fig. 36.
Anche in questo caso la figura riporta, in verde, anche l’angolo gamma in radianti ottimale. Al
di sotto della velocità base l’angolo ottimale è pari a 0 gradi.
1.4
rad)
1.2
T/Tmax
1.0
P/(3UnIn)
0.8
U
0.6
Un
0.4
0.2
0.0
0
1
2
3
Velocità base
4
5
u
6
Fig. 40: Esempio di caratteristica meccanica limite di macchina isotropa
(E0= 0,70, X0=0,60)
Elementi di propulsione di veicoli a pantografo, pag. 32
Si possono effettuare alcune osservazioni sul diagramma:
1. la velocità base viene diversa (in questo caso superiore) a u=1. Questo non deve sorprendere la scelta del riferimento di velocità non è stata ancora effettuata in maniera da
far corrispondere u=1 con la fine del tratto costante della coppia
2. superato il tratto di coppia costante e tensione linearmente crescente la potenza cresce
ancora, seppur con pendenza minore. Questo è facilmente interpretabile considerando la
(9): inizialmente l’aumento della potenza dovuto al crescere di u è solo parzialmente
compensato dalla diminuzione dovuta alla riduzione di cos.
3. Si arriva però (in questo caso) ad un massimo, oltre il quale la potenza comincia a decrescere. In corrispondenza del massimo la tensione ai morsetti della macchina e la corrente
entrante sono in fase, e quindi la potenza è proprio 3UnIn. In questo caso il triangolo fasoriale, del tipo di quelli riportati nelle figure da 37 a 39 diventa rettangolo con U e X0I
che sono fra loro ortogonali.
Questo non accade sempre. Se si realizza una macchina caratterizzata dalla condizione:
E0=X0 In
(11)
il punto di massima potenza si sposta a velocità molto elevate, teoricamente illimitate, secondo il
diagramma di fig. 41.
1,4
rad)
T/Tmax
1,0
P/(3UnIn)
U
0,6
Un
0,2
0,0
0
1
2
3
Velocità base
4
5
u
6
Fig. 41: Caratteristiche di macchina isotropa con la condizione che E0=X0In.
Questo fatto può anche essere spiegato facendo riferimento alla (10). Inserendo la condizione
(11) essa infatti diviene:
2u2 X 02 I n 2 (1 sin ) U n2
Per valori molto grandi di u essa è verificata con angoli tendenti a 90°, con i quali nei diagrammi delle figure da 37 a 39 tendono a diventare verticali sia il fasore della corrente che di Un, e
quindi essi sono allineati. Di conseguenza la potenza tende a divenire proprio 3UnIn, cioè il valore
massimo riportato nella figura 40.
Occorre dire che nei casi reali la condizione E0=X0In consente di realizzare elasticità molto elevate, ma non illimitate, in quanto si ha elasticità illimitata soltanto con ipotesi semplificative molto
drastiche, fra cui funzionamento del ferro in condizioni di linearità, trascurabilità dei flussi dispersi
e degli effetti della resistenza statorica.
Per concludere sull’argomento ricaviamo la velocità base per la macchina isotropa considerata.
Elementi di propulsione di veicoli a pantografo, pag. 33
Partiamo ancora dalla (10), imponendo in essa che valga l’uguaglianza in luogo della disuguaglianza, la corrente sia pari al valore nominale e l’angolo sia pari a 0:
u 2 ( E02 X 02 I n2 ) U n2
E’ opportuno a questo punto far comparire la velocità angolare effettiva e non u. Si ha:
2
2 (PM
L2s I n2 ) U n2
e quindi:
Un
b
2
PM
L2 I n2
essendo infatti, come è noto:
E PM X s Ls
(PM è il flusso concatenato prodotto dai magneti permanenti e Ls è l’induttanza sincrona, cioè
quella che determina, previa moltiplicazione per la pulsazione, la reattanza del circuito monofase
equivalente della macchina.)
6.4. Controllo
Anche nel caso degli azionamenti sincroni, vale quanto osservato per la macchina in corrente
continua e asincrona, che cioè si realizza un controllo in catena aperta della coppia, mentre il loop
di retroazione viene chiuso dal pilota che tende a seguire un profilo di velocità.
Il controllo della macchina sincrona a magneti permanenti più complesso di quello dei casi precedenti. Se ne riporta in fig 42 il solo schema di principio, rimandandone l’analisi di dettaglio al
successivo corso di Propulsione Elettrica.
retroazione
Id
Id *
T*
Controllo
coppia
Iq *
U*
Ud*
+
Controllo
Id -Iq
+-
To
Clarke
Uq*
SMPM
Modulat.
U* SV-PWM
defluss.
Angolo albero
y
x
-+
KUDC
Ud2
U 2q
To Park
Id
Iq
Fig. 42: Schema di controllo di motore brushless, con rasformazione di Park e Clarke.
6.5. Alimentazione dei motori di un veicolo
Tutti gli schemi finora riportati facevano riferimento, per semplicità, all’alimentazione di motori
singoli.
Nella realtà, invece, i veicoli hanno normalmente più motori.
Per i veicoli a propulsione elettrica è prassi comune eliminare completamente il differenziale
meccanico, utilizzando azionamenti indipendenti per le due ruote. In tal modo non solo e possibile,
Elementi di propulsione di veicoli a pantografo, pag. 34
richiedendo l’uguaglianza delle coppie generate sulle due ruote, realizzare in maniera naturale la
funzione svolta nel differenziale meccanico nelle autovetture tradizionali, ma è anche possibile effettuare un controllo della trazione particolarmente efficace quando vi è perdita di aderenza su una
delle tue ruote, concentrando sulla ruota aderente tutta la coppia che è possibile trasmettere, compatibilmente con il dimensionamento dell’azionamento e le caratteristiche di aderenza.
In maniera analoga risulta molto comodo e naturale realizzare veicoli a 4 ruote motrici, con la
possibilità di ripartire dinamicamente, e in funzione delle strategie di controllo più opportune, la
coppia sulle quattro ruote.
Uq=u(E0+XdId)
Elementi di propulsione di veicoli a pantografo, pag. 35