DISPENSA DI FISICA CLASSE I A
La fisica e il metodo sperimentale
L'uomo, spinto dal desiderio di conoscere e, quindi, di dominare il mondo che lo circonda e anche dal
senso inventivo di realizzare nuovi fatti per migliorare le sue condizioni, ha cercato nel corso dei
secoli di descrivere, coordinare e spiegare i fenomeni naturali.
Per fenomeno naturale non si deve intendere qualcosa di insolito e straordinario ma qualsiasi fatto
che avviene in natura. Attraverso lo studio della fisica (dall'antico greco (poet; = natura) si é
perseguito e si continua a perseguire come scopo ultimo la conoscenza dei fenomeni naturali.
Certamente la visione che oggi si ha del mondo non é la stessa di quella di ieri, né sarà eguale a
quella di domani. Se si vuole, pero, che il discorso fisico non cambi da un momento all'altro e che le
grandi teorie su cui esso si basa non si riducano a semplici manifestazioni del pensiero, quali sono le
vie che bisogna seguire? La risposta sta nel modo in cui vengono poste le basi del discorso fisico. Sevi
é un metodo che più degli altri permette di conservare le conquiste fatte e farne delle nuove, questo
é il metodo sperimentale; esso fu introdotto da Galileo Galilei (1) ed é basato sulla osservazione di
ogni fenomeno, sull'esperimento e sulla misurazione.
Illustriamo quanto abbiamo detto con un esempio.
Si consideri la caduta dei gravi nell'aria: si trova che corpi diversi per forma e per costituzione
seguono movimenti differenti. Questa prima fase dello studio di un fenomeno cosi come avviene in
natura costituisce l'osservazione. Si segua il fenomeno della caduta dei gravi nel tubo di Newton,
cioè in un lungo tubo svuotato dell'aria: si constata che tali corpi, nel vuoto, si muovono allo stesso
modo. Questa seconda fase dello studio di un fenomeno, in condizioni provocate artificialmente, ben
controllabili e ripetibili, costituisce l'esperimento o esperienza fisica. Si stabilisca, quindi, con
operazioni effettuate mediante regoli metrici quali sono le posizioni, iniziale e finale, occupate da un
corpo in caduta libera e con operazioni effettuate mediante orologi se ne determinino gli istanti
corrispondenti. Quest'ultima fase dello studio di un fenomeno da un punto di vista quantitativo
costituisce la misurazione.
Si riesce cosi a provare che un grave in caduta libera nel vuoto aumenta la propria velocità di circa 10
metri al secondo per ogni secondo e che percorre nel primo secondo circa 5 metri, in quello
successivo 15 metri, nel terzo 25 metri e cosi via.
Grandezze fisiche fondamentali e derivate
Gli elementi fondamentali del discorso fisico sono le grandezze fisiche, dal cui legame scaturiscono le
Leggi Fisiche. Le grandezze fisiche vengono definite seguendo il metodo operativo, stabilendo cioè
quali criteri e quali procedimenti sono necessari per misurare le grandezze stesse.
Più precisamente, diciamo che le grandezze fisiche sono ogni insieme di enti per i quali é possibile
stabilire, sempre mediante operazioni fisicamente effettuabili, quanto segue:
1) l'eguaglianza e la diseguaglianza tra due elementi dell’insieme;
2) la somma di due o più elementi dell’insieme;
3) l'elemento dell’insieme che si sceglie come unita di misura.
II metodo operativo su cui é basata la definizione delle grandezze fisiche trae la sua origine in gran
parte dai fatti comuni della vita quotidiana.
Come facciamo, ad esempio, per misurare ii perimetro di una stanza? Quando stabiliamo, ad occhio,
che le lunghezze delle pareti opposte sono eguali mentre quelle di due pareti consecutive sono
pag. 2
diverse, non facciamo altro che applicare il primo criterio, cioè il criterio di eguaglianza e
diseguaglianza; se poi stabiliamo che il perimetro della stanza é dato dalla somma delle lunghezze
delle quattro pareti, applichiamo il secondo criterio, cioè il criterio della somma; se infine prendiamo
come lunghezza di riferimento il metro, applichiamo il terzo criterio, cioè la scelta dell’unita di
misura.
La misurazione poi viene effettuata nel modo seguente. Facciamo coincidere un estremo del metro
con l’estremità di una parete della stanza e, trasportando successivamente il metro lungo la parete
su una retta orizzontale, constatiamo quante volte vi è contenuto. II numero cosi ottenuto da la
misura della lunghezza della parete. Ripetiamo l'operazione per le altre pareti: la somma delle misure
delle lunghezze delle quattro pareti da, infine, la misura del perimetro della stanza.
Un insieme di grandezze per le quali si possono stabilire i criteri 1, 2 e 3 costituisce un insieme di
grandezze omogenee.
Il rapporto tra una grandezza dell’insieme ed un'altra grandezza dell’insieme stesso, scelta come
unita di misura, definisce la misura della grandezza. Il rapporto tra due grandezze omogenee,
misurate con la stessa unita di misura, definisce una grandezza adimensionale.
In conclusione le grandezze fisiche sono tutti gli enti misurabili per i quali cioè si può definire,
operativamente, il confronto, la somma e l’unità di misura.
Precisiamo che l'operazione mediante la quale si ottiene la misura di una grandezza é detta
misurazione.
Le grandezze fisiche vengono generalmente distinte in grandezze fondamentali o primarie e
grandezze derivate o secondarie.
Sono grandezze fondamentali quelle la cui definizione non dipende da altre grandezze mentre si
dicono derivate tutte quelle la cui definizione dipende dalle grandezze fondamentali.
La lunghezza e la sua unità di misura
La nozione di spazio e quella di lunghezza, ad esso strettamente legata, sono alla base di tutta la
geometria.
In fisica la lunghezza viene considerata grandezza fondamentale e come tale se ne dà solamente la
definizione operativa, precisando i criteri e le operazioni che consentono la sua misura.
Nei casi più comuni per misurare una lunghezza si può usare il regolo rettilineo o riga. Mediante il
regolo rettilineo si pub stabilire:
1) se due lunghezze sono eguali o diverse;
2) qual é la somma di due o più lunghezze.
Effettuato il confronto e la somma di due o più lunghezze, occorre stabilire l'unità di misura.
UNITA DI MISURA DELLA LUNGHEZZA
Come unità di misura della lunghezza é stato scelto il metro (m), che viene definito nel modo
seguente:
il metro é la distanza, alla temperatura di 0 °C. tra due tratti paralleli riportati su una particolare
sbarra di platino-iridio, conservata nell'Archivio internazionale di Pesi e Misure di Sevres presso Parigi.
pag. 3
Il tempo e la sua unità di misura
La nozione di tempo ha origine dalla nostra esperienza basata sulla percezione del susseguirsi degli
eventi da noi osservati. Ora, anche se questa percezione ci consentisse di distribuire gli eventi stessi
secondo un ordine crescente di << prima-dopo >> ovviamente, una tale scala temporale sarebbe
puramente qualitativa, oltre che soggettiva (tempo fisiologico). Si rende quindi necessario eliminare
dal concetto di tempo ogni elemento fisiologico e concretizzarlo in quello di grandezza fisica (tempo
fisico). In fisica, pertanto, il tempo si considera ente primitivo e si definisce operativamente, come
grandezza fondamentale, la durata o intervallo di tempo, cioè la differenza tra due tempi detti,
rispettivamente, istante finale e istante iniziale. Ovviamente, nella scala dei tempi qualsiasi istante si
può scegliere come riferimento e porlo, per convenzione, eguale a zero.
Come unita di misura dell'intervallo di tempo é stato scelto il secondo solare medio (s)
La massa e la sua unità di misura
Una caratteristica dei corpi e la loro massa che solitamente viene definita come la quantità di materia
contenuta nei corpi stessi.
Per effettuare le operazioni che conducono alla misura della massa eguali o diversi intervalli di
tempo. di un corpo si può usare la bilancia.
Con tale strumento si pub stabilire:
1) se due masse sono eguali o diverse.
2) qual é la somma di due o più masse.
UNITA DI MISURA DELLA MASSA
Come unità di misura della massa é stato scelto il chilogrammo (kg) cosi definito:
il chilogrammo é la massa di un blocchetto cilindrico di platino-iridio conservato nell’Archivio
Internazionale di Pesi e Misure di Sévres presso Parigi.
Grandezze scalari e grandezze vettoriali
Il numero che rappresenta la misura della grandezza seguito dall’unità di misura è detto: Modulo o
Intensità della grandezza. Tali grandezze sono dette Scalari.
Per tutte le grandezze per la cui definizione non occorrono altri elementi per la loro definizione
all’infuori del modulo o l’intensità sono dette Grandezze Scalari.
Se per esempio consideriamo un punto materiale (rappresentazione grafica di un punto che non ha
dimensione) può compiere degli spostamenti. Per descrivere tale grandezza fisica c’è bisogno di
introdurre altri elementi.
Per determinare lo spostamento di un punto materiale nello spazio c’è bisogno di introdurre altre
grandezze oltre al modulo o intensità, questo perché nello spazio il punto materiale può compiere
infiniti spostamenti in qualsiasi direzione ed in qualsiasi verso sempre con lo stesso modulo.
Quindi per definire lo spostamento di un punto materiale si introdurranno altre due elementi:
la direzione ed il verso.
Tutte le grandezze per le quali oltre al modulo o intensità per la loro definizione c’è bisogno anche di
direzione e verso, sono dette Grandezze Vettoriali
DEFINIZIONE DI VETTORE
Il vettore è un segmento orientato nello spazio individuato mediante i seguenti elementi
caratteristici: direzione, verso, e intensità o modulo.
pag. 4
In conclusione possiamo dire che lo spostamento è una grandezza vettoriale.
Cenni di calcolo vettoriale
a) SOMMA DI VETTORI
Dati due vettori V1=OV1 e V2=OV2 applicati ad uno stesso punto O e formanti un certo angolo, si
definisce Vettore Somma o Risultante il vettore V=OV individuato dalla diagonale del
parallelogramma che ha per lati i vettori assegnati (regola del parallelogramma).
Se i vettori sono più di due il vettore somma è dato dal lato di chiusura del poligono avente come lati
i vettori assegnati (regola del poligono).
b) DIFFERENZA DI DUE VETTORI
Si definisce vettore opposto al vettore dato il vettore che ha la stessa intensità, la stessa direzione,
ma verso contrario. Dati due vettori V1=OV1 e V2=OV2 applicati allo stesso punto O e formanti un
certo angolo, si definisce differenza dei due vettori il vettore V=OV ottenuto dalla somma vettoriale
di V1 e dell’opposto di V2.
pag. 5
c) PRODOTTO DI UNA GRANDEZZA SCALARE PER UN VETTORE
Dato un vettore V=OV ed un numero reale n (scalare) si definisce prodotto di una grandezza scalare
per un vettore il U=nxV avente la stessa direzione del vettore V, lo stesso verso, e intensità = nxV.
d) SCOMPOSIZIONE DI UN VETTORE IN DUE DI DIREZIONE ASSEGNATE
Dato un vettore V=OV e due direzioni Or1 ed Or2, dall’estremo V conduciamo le parallele alle due
direzioni, e i punti V1 e V2, individuati su r1 e r2 determinano i vettori V1=OV1, e V2=OV2
(procedimento inverso alla somma).
Metodi di misurazione delle grandezze Fisiche
Come si é visto, la determinazione quantitativa di una grandezza fisica si effettua attraverso la
misurazione, operazione il cui risultato é la misura che esprime il rapporto tra la grandezza da
misurare ed un'altra grandezza ad essa omogenea, presa come unità di misura.
La misurazione di una grandezza fisica può essere effettuata seguendo tre metodi diversi.
a) Metodo di misurazione diretta: è’ detto anche metodo di misurazione relativa e consiste nel
confrontare la grandezza che si vuole misurare con un'altra della stessa specie scelta come
campione o unità di misura. Questo metodo si applica per la misurazione delle grandezze
fondamentali.
b) Metodo di misurazione indiretta: è detto anche metodo di misurazione assoluta e consiste nel
determinare il valore della grandezza in esame misurando direttamente le altre grandezze da cui
essa dipende secondo una relazione ben definita.
pag. 6
Così, per esempio, per misurare il volume di un corpo a forma cilindrica si misurano diretta mente
l'altezza h ed il raggio r del cilindro e mediante la formula V = π r2 h se ne ricava il volume.
c) Metodo di misurazione con strumenti tarati: questo metodo consiste nell’impiego di strumenti
tarati, cioè di particolari dispositivi muniti di scale e di indici le cui indicazioni sono state
controllate in base alla misurazione diretta o indiretta delle grandezze in esame; tale operazione
viene detta taratura dello strumento.
Calcolo degli errori
Per determinare la misura delle grandezze fisiche il metodo più: diffuso é quello con strumenti tarati
in quanto la misura stessa si riconduce alla osservazione della posizione di indici su scale, operazione
che si può eseguire con elevata precisione.
Se si ripetono varie volte le misurazioni di una grandezza fisica, si otterranno dei valori x1, x2,,,xn
che, in generale, differiscono tra loro.
Seguendo il principio della media di Gauss (o aritmetica), si assumerà come valore più probabile della
grandezza in esame il valore dato dalla media aritmetica
X=x1+x2+,,,+xn/n
E bene osservare che non esistono misure esatte in quanto in ogni misurazione si commettono degli
errori che possono essere accidentali o sistematici.
Gli errori accidentali dipendono da circostanze perturbatrici fortuite; essi influiscono nelle misure,
ottenute eseguendo una serie di misurazioni di una grandezza fisica, ora in un senso, ora nell’altro e
con intensità variabile. Dato che gli errori accidentali sono legati ad altri fenomeni non controllabili
che si sovrappongono al fenomeno in esame influenzandolo in modo del tutto casuale, essi non si
possono mai eliminare (esempio differenza di temperatura a causa della quale gli strumenti si
dilatano o si restringono ecc.).
Gli errori sistematici sono quelli che dipendono da difetti costruttivi degli strumenti, vizi nel metodo
usato, particolare comportamento dell'osservatore, ecc.. Essi influiscono sul risultato sempre nello
stesso senso e con la stessa intensità e si possono eliminare o ridurre variando i metodi, gli strumenti
e gli osservatori.
Il calcolo degli errori presuppone la conoscenza del valore vero della grandezza da misurare; poiché
ciò é impossibile, si ricorre ai calcolo del valore più probabile delle varie misure. Se non e richiesta
una elevata precisione e se le misure sono poco numerose, é sufficiente calcolare l'errore assoluto
massimo dato dalla semidifferenza tra il valore massimo XM ed il valore minimo Xm delle misure
ottenute:
a=XM-Xm/2
Tenendo conto dell'errore assoluto, la misura della grandezza in esame si esprime con la notazione:
X=X+/- a
pag. 7
Più significativo dell'errore assoluto, per stimare la precisione di una misura, é l'errore relativo
definito dal rapporto tra l'errore assoluto e il valore medio della grandezza; cioè:
r= a/X
Se poi si vuole l’errore relativo percentuale, basta moltiplicare per cento quello relativo.
Supponiamo, ad esempio, di aver misurato la massa di un anello d'oro con una bilancia d'analisi,
avente la sensibilità di un milligrammo, e di aver eseguito 6 misurazioni i cui risultati sono:
m1 = 7,580 g m2 = 7,583 g m3 = 7,530 9
m4 = 7,581 g m5 = 7,584 g m6 = 7,530 9
La media aritmetica dei sei valori da il valore della massa del corpo:
m = m1 +m2+m3+m4+m5+m6 / 6 =7,581 g
l’errore assoluto massimo è: a = 7,584-7,582 / 2 = 0,002 g
La massa dell’anello sarà: m = (7,581 +/- 0,002) g
L’errore percentuale sarà: 0,0026%
pag. 8
Introduzione alla meccanica
La meccanica
La meccanica é Ia più antica delle scienze fisiche: essa infatti si occupa del movimento e questo è uno
dei fenomeni naturali che per primo ha destato l'interesse dell'uomo.
Di solito la meccanica si suddivide in tre parti:
1. la cinematica che studia il movimento dei corpi senza tener conto delle cause che Io
producono;
2. Ia dinamica che studia il movimento dei corpi e Ie sue cause;
3. la statica che studia le condizioni di equilibrio dei corpi.
Nell'idea di movimento sono intimamente legati i concetti primitivi di posizione e di tempo.
Un corpo é in movimento se la sua posizione, misurata dalla distanza da un altro corpo, considerato
fisso, varia al variare del tempo.
Cosi, per esempio, stando nel vagone di un treno, diciamo di essere in movimento quando la nostra
posizione, rispetto a quella della strada ferrata, cambia istante per istante. Ma noi possiamo anche
muoverci all'interno del vagone che é in movimento rispetto alla strada ferrata, la quale, a sua volta,
essendo fissata alla Terra, é in movimento rispetto al Sole e cosi via.
E facile capire che se riferissimo il nostro movimento al Sole, anziché alle pareti del vagone, il
movimento stesso risulterebbe molto complicato. D'altra parte non potendo stabilire l'esistenza di
un qualcosa che occupi nell'universo sempre la stessa posizione, non ha significato parlare di moto
assoluto e, pertanto, il moto di un corpo é sempre relativo, cioè riferito ad un altro corpo
arbitrariamente scelto, che si considera fisso e che viene detto sistema di riferimento.
Sistemi di riferimento
Come é stato precisato nel paragrafo precedente un corpo si muove relativamente ad un sistema di
riferimento quando la sua posizione varia nel tempo.
Ora, per determinare il movimento di un corpo, bisognerebbe conoscere il movimento di ciascuna
particella di cui esso é costituito e ciò ovviamente, è impossibile.
Pertanto, in una prima trattazione del movimento di un corpo, prescinderemo dalle sue dimensioni,
dalla sua forma, dalla sua costituzione chimica, eccetera, e Io considereremo come un punto, che
chiameremo punto materiale o particella.
Si tenga però sempre presente che il punto materiale, per definizione privo di estensione, é una
astrazione accettabile in quei casi in cui si rende necessaria una notevole semplificazione dei
problemi che si debbono risolvere.
Per quanto riguarda il sistema di riferimento, sceglieremo una terna di assi cartesiani ortogonali XYZ
aventi l'origine in un punto O e fissa nello spazio. Ai fini pratici tale terna di assi si considera solidale
con Ia Terra e viene detta sistema di riferimento terrestre o da laboratorio.
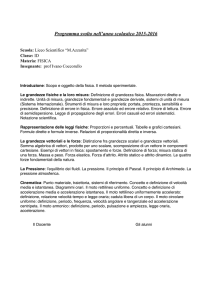
Riferendoci alla figura diciamo che un punto materiale P é in quiete o in moto quando le sue
coordinate, cioè Ie distanze x, y e z, rispettivamente, dai piani YZ, X2 e XY, si mantengono costanti o
variano nel tempo.
pag. 9
Se il punto P é in movimento, per conoscere istante per istante la sua posizione, debbono essere
note le coordinate x, y e z dei punto stesso in funzione del tempo t.
Il luogo delle posizioni occupate dal punto P durante il suo movimento é una linea a cui si da il nome
di traiettoria; questa può essere una retta o una curva. Nel primo caso il moto si dice rettilineo, nel
secondo caso curvilineo.
Quando il moto del punto materiale avviene in un piano, il sistema di riferimento si riduce a due assi
cartesiani ortogonali XY di origine O, appartenente al piano su cui si muove il punto stesso.
Se infine il moto del punto avviene lungo una retta, il sistema di riferimento si riduce ad un solo asse
X di origine O.
pag. 10
A chiarimento di quanto detto facciamo un esempio.
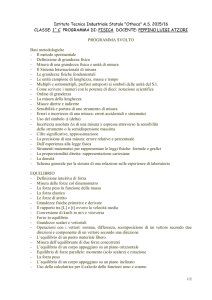
Supponiamo che un punto materiale si muova su un piano e che, relativamente al sistema di assi
cartesiani ortogonali XY di origine O, siano note le coordinate del punto in funzione del tempo:
x=15t,
y=—5t2
Moto di un punto materiale definito dalle relazioni: x = 15 t, y = — 5t2.
In questo caso il movimento del punto é perfettamente individuato in quanto si può conoscere la sua
posizione in qualsiasi istante.
Le prime grandezze che caratterizzano il movimento:
velocità e accelerazione
a) Velocità.
Riferito al movimento dei corpi, il concetto di velocità esprime intuitivamente la rapidità con cui
varia la loro posizione; in esso, quindi, sono contenuti i concetti primitivi di lunghezza e di tempo.
Cosi, per esempio, diciamo che un'auto é tanto più veloce quanto minore e il tempo che impiega a
compiere un dato percorso.
Il cammino che effettivamente percorre un punto materiale in movimento si suole chiamare, anche
se impropriamente, spazio percorso.
Non si confonda pero Io spazio percorso da un punto materiale, che é una grandezza scalare, col suo
spostamento, che é una grandezza vettoriale, il cui modulo e dato dalla distanza tra una data
posizione P0 occupata dal punto materiale ed un'altra posizione P, indipendentemente dal modo
come il punto passa da Po a P, e avente la direzione della retta P0-P e verso da P0 a P.
Volendo precisare il concetto di velocità da un punto di vista quantitativo, si può procedere nel modo
seguente. Sia L la traiettoria che descrive il punto materiale in movimento; fissato su L un punto O
come riferimento, siano P0, e P le posizioni occupate dal punto mobile negli istanti t0 e t; poniamo
OP = s0 ed OP=s
pag. 11
Il rapporto tra la lunghezza dell'arco PP0 = (s — s0) percorso e l'intervallo di tempo (t — t0)
impiegato a percorrerlo, definisce la velocità scalare media.
VELOCITA SCALARE MEDIA
La velocità scalare media di un punto materiale in movimento é il rapporto tra lo spazio da esso
percorso ed il tempo impiegato a percorrerlo.
Considerando intervalli di tempo (t — t0) via via più piccoli, le posizioni P0 e P, occupate dal punto
materiale in movimento, sono sempre più: vicine; si troveranno cosi velocità medie scalari tendenti
ad un valore limite che si chiama velocità scalare istantanea.
Precisiamo che la velocità, cosi come é stata definita, é una grandezza fisica derivata da una
lunghezza e da un intervallo di tempo; di conseguenza la sua unita di misura nel SI è il metro al
secondo (m/s)
Chiariamo il concetto di velocità scalare media considerando, per esempio, il moto di un ciclista
lungo una pista.
Scelta la posizione O come riferimento, fissiamo mediante un orologio l'istante t0 in cui il ciclista
passa per la posizione A: sia, per esempio, t0 = 30 s. Segniamo quindi l'istante t in cui il ciclista stesso
passa per la posizione B e sia, per esempio, t = 40 s.
Misuriamo gli spazi so = OA ed s = OB e siano rispettivamente so = 125 m ed s = 245 m. La velocità
scalare media del ciclista nel tratto AB é:
pag. 12
Nella definizione di velocità scalare non vengono precisati la direzione ed il verso del movimento del
punto materiale. Per arricchire il concetto di velocita é conveniente considerare la velocità stessa
come grandezza vettoriale.
Sia L la traiettoria descritta dal punto materiale in movimento; fissato su L un punto O come origine e
scelto come verso positivo quello antiorario, siano P0 e P le posizioni occupate dal punto stesso negli
istanti t0 e t. Se i vettori s0 = OP0 ed s = OP rappresentano, rispettivamente, gli spostamenti negli
istanti considerati, il vettore
definito dal rapporto tra lo spostamento P0P= (s — s0), e l'intervallo di tempo (t – t0) in cui tale
spostamento é avvenuto, rappresenta la velocità vettoriale media.
VELOCITA VETTORIALE MEDIA
La velocità vettoriale media di un punto materiale in movimento é il rapporto tra lo spostamento
da esso subito ed il tempo durante il quale é avvenuto lo spostamento stesso.
Considerando intervalli di tempo (t — t0) via via più piccoli, le posizioni P0, e P, occupate dal punto
materiale in movimento, sono sempre più vicine; si troveranno, pertanto, velocità vettoriali medie
tendenti ad un valore limite V che si chiama velocità vettoriale istantanea.
pag. 13
La velocità vettoriale istantanea nel punto P0 si può rappresentare con un vettore V di origine in P0,
avente direzione tangente alla traiettoria in P0, verso coincidente con quello del movimento e
intensità eguale a quella della velocità scalare istantanea.
b) Accelerazione.
Il concetto di velocità da solo non basta per caratterizzare il movimento di un punto materiale;
occorre anche conoscere come essa varia istante per istante. Siano v0 e v rispettivamente le velocità
di un punto materiale nell'istante t0 in cui occupa la posizione P0, e nell'istante t quando occupa la
posizione P.
Il rapporto tra la variazione di velocità (v – v0), subita dal punto materiale in movimento ed il
corrispondente intervallo di tempo (t — t0) in cui tale variazione avviene, é l'altra grandezza
vettoriale che insieme alla velocità caratterizza il movimento: essa viene detta accelerazione media.
ACCELERAZIONE MEDIA
L'accelerazione media é il rapporto tra la variazione di velocità subita da un punto materiale in
movimento ed il tempo durante il quale é avvenuta detta variazione.
Considerando intervalli di tempo (t — to) sempre più piccoli si avranno accelerazioni medie sempre
più vicine ad un valore limite che si chiama accelerazione istantanea.
Precisiamo che l'accelerazione si può definire anche come la variazione di velocità subita da un punto
materiale in movimento nell'unità di tempo.
La sua unità di misura nel SI é il metro al secondo al quadrato (m/s2).
Poiché la velocità di un punto materiale in movimento può variare sia di intensità che di direzione, si
definiscono due tipi diversi di accelerazione.
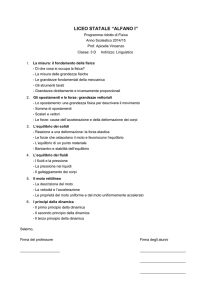
Sia a il vettore che rappresenta l'accelerazione istantanea di un punto materiale quando occupa la
posizione P della traiettoria L su cui si muove. Scomponiamo tale vettore in due vettori uno at, in
direzione della tangente in P alla traiettoria ed uno an in direzione della normale in P alla traiettoria
pag. 14
stessa; i vettori at, ed an , vengono detti, rispettivamente, accelerazione tangenziale ed
accelerazione centripeta o normale.
L'accelerazione tangenziale esprime la variazione di intensità della velocità nell'unità di tempo
mentre l'accelerazione centripeta esprime la variazione di direzione della velocità nell'unità di
tempo.
pag. 15
Leggi della dinamica e gravitazione universale
Considerazioni preliminari
Consideriamo una pallina di ferro appoggiata su un tavolo orizzontale e in quiete relativamente ad
esso. L'esperienza mostra che affinché la pallina si metta in movimento rispetto al tavolo occorre una
causa esterna, che potrebbe essere una piccola spinta, l'azione di una molia, l'attrazione di una
calamita, o semplicemente la mancanza del vincoio, che é il tavolo. In quest'ultimo caso il movimento
della pallina é dovuto all'attrazione che la Terra esercita su di essa.
Supponiamo ora che la pallina si muova su una guida rettilinea. Anche questa volta l'esperienza
mostra che per variare la sua velocita, o per fermarla, occorre una causa esterna che potrebbe essere
l'azione esercitata da un ostacolo posto sul cammino della pallina o semplicemente l'attrito.
In ogni caso, possiamo dire che la variazione di velocità della pallina non e mai un fatto spontaneo e
richiede sempre una determinata causa. Osserviamo inoltre che, finché la pallina é appoggiata sul
tavolo, essa resta ferma non perché viene a mancare l’attrazione da parte della Terra, ma in quanto
c'é il tavolo a impedirne il movimento. In questo caso si puo constatare che la causa che metterebbe
in movimento la pallina, se fosse libera, si manifesta, invece, attraverso Ie deformazioni che
subiscono sia la pallina che il tavolo. Dalle osservazioni fatte, possiamo dire che:
la forza é la causa della variazione di velocita o della deformazione che subisce un corpo al quale
viene applicata la forza stessa.
II concetto di forza e quelli di massa e acceierazione sono alla base della dinamica, cioe del moto e le
sue cause. Questa indagine si fonda su tre leggi o principi che furono enunciati dal fisico inglese Isaac
Newton (1642-1727) in forma assiomatica nella sua opera <<PhiIosophiae naturalis principia
mathematica» pubblicata nell'anno 1687.
Occorre sottolineare che nella formulazione delle leggi della dinamica di Newton i corpi vanno
considerati come particelle o punti materiali e la loro massa é ritenuta costante durante il loro
movimento (meccanica classica o di Galilei-Newton).
Il principio d’inerzia
La prima legge della dinamica di Newton è nota storicamente come legge o principio d’inerzia.
Essa fu intuita da Galileo Galilei come conseguenza dei suoi studi sul moto dei gravi lungo un piano
inclinato quando, in particolare, l'angolo di inclinazione del piano stesso é nullo (piano orizzontaie).
Lanciando un grave su una superficie orizzontale, il grave stesso procede con velocita gradualmente
decrescente; Galilei comprese che tale variazione di velocita era dovuta aIl'attrito e alla resistenza
dell'aria. Riducendo via via tali resistenze, il moto tende sempre ad un moto rettilineo uniforme; nel
caso ideaie che queste resistenze venissero completamente eliminate, il corpo dovrebbe procedere
sempre con velocita costante in intensità, direzione e verso.
Nei caso di un corpo inizialmente fermo su un piano orizzontaie é evidente che in assenza di forze
esso perseveri nel suo stato di quiete. Questo fatto era gia noto sin dai tempi di Aristotele per il quale
non era altrettanto evidente come un corpo si potesse mantenere in movimento senza l'intervento di
una forza esterna. Bastava pero una analisi piu approfondita per riconoscere che tutti i movimenti si
estinguono, se non sono sostenuti da forze attive, a causa delle forze passive (attrito e resistenza
pag. 16
dell'aria). Cio fu compreso, come si è detto, prima da Galilei e successivamente da Newton, al quale
si deve la formulazione definitiva del principio d'inerzia che si puo ritenere ancora valida.
PRINCIPIO D'lNERZlA (prima legge della dinamica o di Newton)
Un corpo rimane nel suo stato di quiete o di moto rettilineo uniforme sino a quando non agiscono
su di esso forze esterne.
Concludiamo facendo presente che il principio di inerzia non puo essere verificato sperimentalmente
in quanto non si riesce ad isolare in maniera completa alcun corpo o sistema di corpi in movimento.
La legge fondamentale della dinamica
Come abbiamo detto nel precedente paragrafo, se ad un corpo, inizialmente fermo o in moto
rettilineo uniforme rispetto ad un sistema di riferimento, non viene applicata alcuna forza, esso
continua a mantenere il proprio stato di quiete o di moto rettilineo uniforme.
Se pero il corpo é soggetto ad una forza, si osserva che la sua velocita cambia istante per istante; cio
vuol dire che, per effetto della forza, il corpo subisce una accelerazione.
Come si comportano corpi aventi massa differente quando vengono soggetti separatamente
all'azione di una stessa forza?
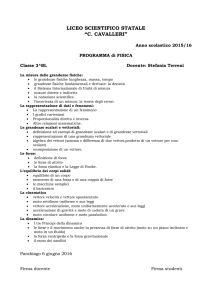
Per rispondere a tale domanda ci serviremo del dispositivo sperimentale in figura costituito da un
carrello A che puo essere messo in movimento su una guida rettilinea ed orizzontale.
Dopo aver determinato la massa m del carrello, poniamo il carrello stesso nella posizione M ed
applichiamo ad esso una forza tramite il pesetto P, legato al filo f che passa per la gola della carrucola
C. Poiché il carrello é libero di spostarsi lungo la guida, esso, sotto l'azione di tale forza, si mettera in
movimento. Misuriamo l'intervallo di tempo occorrente per portare il carrello dalla posizione di
quiete M in un'altra posizione N e calcoliamo la velocita del carrello stesso nell'istante in cui passa
per N.
In questo modo si puo determinare l'accelerazione del carrello mediante il rapporto tra la variazione
della velocita da esso subita nel passare da M ad N ed il corrispondente intervallo di tempo; sia a il
pag. 17
modulo di questa accelerazione. Mettiamo ora sul carrello dei blocchetti B in modo da farne variare
la massa e ripetiamo piu volte l'esperienza lasciando invariato il pesetto P e, quindi, la forza applicata
al carrello.
Se m1, m2, m3, sono, per ciascuna esperienza, Ie masse complessive (carrello più blocchetti)e se a1,
a2, a3, sono i corrispondenti valori dell'accelerazione, si verifica, entro i Iimiti degli errori
sperimentali, che i prodotti m1xa1, m2xa2, m3xa3, risultano tutti eguali tra loro ed al prodotto mxa
trovato inizialmente; si ha quindi:
m1xa1 = m2xa2 = m3xa3 = ma.
Sulla base dei fatti sperimentali esaminati, possiamo stabilire che, sottoponendo corpi diversi alla
stessa forza, il prodotto della massa m di ciascun corpo per l'accelerazione a da esso subita si
mantiene costante.
Tale prodotto, che indicheremo con F, si puo prendere come valore della forza stessa, cioé:
F=mxa (3-1)
L'esperienza mostra inoltre che la forza e l'accelerazione hanno Ia stessa direzione e Io stesso verso.
Tenendo presente che la massa di un corpo è una grandezza scalare mentre la forza e l'accelerazi0ne
sono grandezze vettoriali, la (3-1) si scrivera:
F=mxa (3-2)
La (3-2) e l'equazione fondamentale della dinamica; essa esprime la Iegge fondamentale della
dinamica o seconda Iegge di Newton.
pag. 18
LEGGE FONDAMENTALE DELLA DINAMICA (seconda legge della dinamica o di Newton)
La forza applicata ad un corpo libero di muoversi nella direzione della forza é uguale al prodotto
della massa del corpo per I'accelerazione che esso subisce.
Prima di chiudere questo paragrafo facciamo an cora due osservazioni:
1) se ad uno stesso corpo si applicano successivamente forze diverse, si verifica che le accelerazioni
da esso subite sono direttamente proporzionali alle intensita delle forze stesse: cio vuol dire che Ia
massa di un corpo si mantiene costante ed é una sua caratteristica;
2) se a corpi aventi massa diversa si applicano forze eguali, le accelerazioni da essi subite sono
inversamente proporzionali alle loro masse: cio vuol dire che la massa dei corpi è un ostacolo al loro
movimento o, in termini più appropriati, che la massa dei corpi é la misura della loro inerzia.
Per questa sua caratteristica la massa viene detta massa inerziale mentre quella misurata con una
bilancia e detta massa pesante o gravitazionale.
Nel Sistema internazionale la forza e una grandezza derivata: infatti, come abbiamo visto, essa viene
definita, in base alla relazione (3-1), come prodotto della massa per l'accelerazione.
La sua unita di misura é il newton (N) del quale si puo dare la seguente definizione:
il newton é l'intensita di quella forza che agendo su un corpo avente la massa di 1 kg gli imprime
l'accelerazione di 1 m/s2.
La legge di gravitazione universale
Prendendo in esame le ieggi sul moto dei pianeti che Keplero, in seguito alle osservazioni fatte
dall'astronomo Tycho Brahe, aveva formulato empiricamente, Newton pervenne nel 1687 alla legge
di gravitazione universale.
LEGGE DI GRAVITAZIONE UNIVERSALE
Tra due corpi aventi rispettivamente massa m1 ed m2, i cui centri si trovano alla distanza r. si
esercita una forza di mutua attrazione agente in direzione della retta congiungente i centri stessi e
Ia cui intensità é direttamente proporzionale al prodotto delle masse ed inversamente
proporzionale al quadrato della Ioro distanza.
nella quale G é una costante che viene detta costante di gravitazione universale.
ll valore di tale costante fu determinato per via sperimentale Ia prima volta da Lord Cavendish nel
1798; riferendoci al SI e alle misure più recenti, si ha: G = 6,673x10-11 Nm2/kg2
pag. 19
Leggi di Keplero:
1) Tutti i pianeti si muovono su orbite eilittiche di cui il Sole occupa uno dei fuochi.
2) Le aree descritte dai raggi vettori congiungenti ciascun pianeta con il Sole sono direttamente
proporzionali ai tempi impiegati a descriverle.
3) I quadrati dei periodi di rivoluzione di ciascun pianeta sono direttamente proporzionali ai cubi
degli assi maggiori delle Ioro orbite.
La legge di gravitazione universale é stata, e continua ad essere, alla base del progresso della
meccanica astronomica e terrestre. Cosi il pianeta Nettuno fu scoperto nel 1846 in quanto la sua
esistenza era stata prevista da Leverrier per spiegare, in base alla legge di gravitazione universale, Ie
perturbazioni dell'orbita del pianeta Saturno; analogamente é awenuto per Ia scoperta del pianeta
Plutone fatta nel 1930.
Sebbene ancora oggi non si conosca l'ente fisico da cui traggono origine e si trasmettono le forze
gravitazionali, la legge di Newton occupa un posto preminente nel campo della meccanica. Essa e
ancora alla base del calcolo delle orbite dei satelliti artificiali e della programmazione dei viaggi che le
astronavi gia compiono nell'esplorazione del sistema solare.
Il peso dei corpi. Differenza tra massa e peso. La massa della Terra
Lasciando cadere un corpo di massa m entro un Iungo tubo in cui é stato fatto il vuoto e disposto
verticalmente, si puo provare che l'accelerazione del corpo si mantiene costante.
In base alla legge fondamentale della dinamica detta accelerazione non puo essere provocata che da
una forza, diretta verso ii basso secondo Ia verticale. Tale forza, come gia abbiamo avuto occasione di
dire, é il peso del corpo e l'accelerazione é quella di gravità.
Pertanto, se P é il peso dei corpo e g l'accelerazione di gravita, in base alla (3-1) si ha:
P = mg (3-16)
Ma il peso dei corpo non e altro che la forza di attrazione che la Terra esercita sul corpo stesso;
indicando allora con M Ia massa della Terra e con r la distanza tra il suo centro e quello dei corpo, per
Ia legge di gravitazione universale, dev'essere:
P=GxMm/r2 (3-17)
Da questa relazione si vede che il peso di un corpo e inversamente proporzionale al quadrato della
sua distanza dal centro della Terra. Per il fatto poi che la Terra non é perfettamente sferica e ruota
intorno al proprio asse, il peso di un corpo varia oltre che con l'a|titudine anche con Ia latitudine.
In conclusione possiamo dire che:
mentre la massa di un corpo si mantiene costante, il suo peso invece varia da luogo a luogo e di
conseguenza non é una grandezza caratteristica del corpo.
Dal confronto delle relazioni (3-16) e (3-17) si ha:
Mg=GxMm/r2
Da cui
g=GxM/r2
Pertanto i'accelerazione di gravità e indipendente dalla massa dei corpo ed e inversamente
proporzionale al quadrato della sua distanza dal centro della Terra.
pag. 20
Dalla relazione nota l'accelerazione di gravità g dei iuogo e Ia distanza r si puo determinare la massa
M della Terra.
Riferendoci, per esempio, al livello dei mare e prendendo come valori medi di g e r, rispettivamente,
9,8 m/s2 e 6371x103 m, risulta:
9 8. (6371x103)2/(6.67x10-11) = 5.96x1024 kg
pag. 1
Introduzione alla Fisica
La fisica e il metodo sperimentale
L'uomo, spinto dal desiderio di conoscere e, quindi, di dominare il mondo che lo circonda e anche dal
senso inventivo di realizzare nuovi fatti per migliorare le sue condizioni, ha cercato nel corso dei
secoli di descrivere, coordinare e spiegare i fenomeni naturali.
Per fenomeno naturale non si deve intendere qualcosa di insolito e straordinario ma qualsiasi fatto
che avviene in natura. Attraverso lo studio della fisica (dall'antico greco (poet; = natura) si é
perseguito e si continua a perseguire come scopo ultimo la conoscenza dei fenomeni naturali.
Certamente la visione che oggi si ha del mondo non é la stessa di quella di ieri, né sarà eguale a
quella di domani. Se si vuole, pero, che il discorso fisico non cambi da un momento all'altro e che le
grandi teorie su cui esso si basa non si riducano a semplici manifestazioni del pensiero, quali sono le
vie che bisogna seguire? La risposta sta nel modo in cui vengono poste le basi del discorso fisico. Sevi
é un metodo che più degli altri permette di conservare le conquiste fatte e farne delle nuove, questo
é il metodo sperimentale; esso fu introdotto da Galileo Galilei (1) ed é basato sulla osservazione di
ogni fenomeno, sull'esperimento e sulla misurazione.
Illustriamo quanto abbiamo detto con un esempio.
Si consideri la caduta dei gravi nell'aria: si trova che corpi diversi per forma e per costituzione
seguono movimenti differenti. Questa prima fase dello studio di un fenomeno cosi come avviene in
natura costituisce l'osservazione. Si segua il fenomeno della caduta dei gravi nel tubo di Newton,
cioè in un lungo tubo svuotato dell'aria: si constata che tali corpi, nel vuoto, si muovono allo stesso
modo. Questa seconda fase dello studio di un fenomeno, in condizioni provocate artificialmente, ben
controllabili e ripetibili, costituisce l'esperimento o esperienza fisica. Si stabilisca, quindi, con
operazioni effettuate mediante regoli metrici quali sono le posizioni, iniziale e finale, occupate da un
corpo in caduta libera e con operazioni effettuate mediante orologi se ne determinino gli istanti
corrispondenti. Quest'ultima fase dello studio di un fenomeno da un punto di vista quantitativo
costituisce la misurazione.
Si riesce cosi a provare che un grave in caduta libera nel vuoto aumenta la propria velocità di circa 10
metri al secondo per ogni secondo e che percorre nel primo secondo circa 5 metri, in quello
successivo 15 metri, nel terzo 25 metri e cosi via.
Grandezze fisiche fondamentali e derivate
Gli elementi fondamentali del discorso fisico sono le grandezze fisiche, dal cui legame scaturiscono le
Leggi Fisiche. Le grandezze fisiche vengono definite seguendo il metodo operativo, stabilendo cioè
quali criteri e quali procedimenti sono necessari per misurare le grandezze stesse.
Più precisamente, diciamo che le grandezze fisiche sono ogni insieme di enti per i quali é possibile
stabilire, sempre mediante operazioni fisicamente effettuabili, quanto segue:
1) l'eguaglianza e la diseguaglianza tra due elementi dell’insieme;
2) la somma di due o più elementi dell’insieme;
3) l'elemento dell’insieme che si sceglie come unita di misura.
II metodo operativo su cui é basata la definizione delle grandezze fisiche trae la sua origine in gran
parte dai fatti comuni della vita quotidiana.
Come facciamo, ad esempio, per misurare ii perimetro di una stanza? Quando stabiliamo, ad occhio,
che le lunghezze delle pareti opposte sono eguali mentre quelle di due pareti consecutive sono
pag. 2
diverse, non facciamo altro che applicare il primo criterio, cioè il criterio di eguaglianza e
diseguaglianza; se poi stabiliamo che il perimetro della stanza é dato dalla somma delle lunghezze
delle quattro pareti, applichiamo il secondo criterio, cioè il criterio della somma; se infine prendiamo
come lunghezza di riferimento il metro, applichiamo il terzo criterio, cioè la scelta dell’unita di
misura.
La misurazione poi viene effettuata nel modo seguente. Facciamo coincidere un estremo del metro
con l’estremità di una parete della stanza e, trasportando successivamente il metro lungo la parete
su una retta orizzontale, constatiamo quante volte vi è contenuto. II numero cosi ottenuto da la
misura della lunghezza della parete. Ripetiamo l'operazione per le altre pareti: la somma delle misure
delle lunghezze delle quattro pareti da, infine, la misura del perimetro della stanza.
Un insieme di grandezze per le quali si possono stabilire i criteri 1, 2 e 3 costituisce un insieme di
grandezze omogenee.
Il rapporto tra una grandezza dell’insieme ed un'altra grandezza dell’insieme stesso, scelta come
unita di misura, definisce la misura della grandezza. Il rapporto tra due grandezze omogenee,
misurate con la stessa unita di misura, definisce una grandezza adimensionale.
In conclusione le grandezze fisiche sono tutti gli enti misurabili per i quali cioè si può definire,
operativamente, il confronto, la somma e l’unità di misura.
Precisiamo che l'operazione mediante la quale si ottiene la misura di una grandezza é detta
misurazione.
Le grandezze fisiche vengono generalmente distinte in grandezze fondamentali o primarie e
grandezze derivate o secondarie.
Sono grandezze fondamentali quelle la cui definizione non dipende da altre grandezze mentre si
dicono derivate tutte quelle la cui definizione dipende dalle grandezze fondamentali.
La lunghezza e la sua unità di misura
La nozione di spazio e quella di lunghezza, ad esso strettamente legata, sono alla base di tutta la
geometria.
In fisica la lunghezza viene considerata grandezza fondamentale e come tale se ne dà solamente la
definizione operativa, precisando i criteri e le operazioni che consentono la sua misura.
Nei casi più comuni per misurare una lunghezza si può usare il regolo rettilineo o riga. Mediante il
regolo rettilineo si pub stabilire:
1) se due lunghezze sono eguali o diverse;
2) qual é la somma di due o più lunghezze.
Effettuato il confronto e la somma di due o più lunghezze, occorre stabilire l'unità di misura.
UNITA DI MISURA DELLA LUNGHEZZA
Come unità di misura della lunghezza é stato scelto il metro (m), che viene definito nel modo
seguente:
il metro é la distanza, alla temperatura di 0 °C. tra due tratti paralleli riportati su una particolare
sbarra di platino-iridio, conservata nell'Archivio internazionale di Pesi e Misure di Sevres presso Parigi.
pag. 3
Il tempo e la sua unità di misura
La nozione di tempo ha origine dalla nostra esperienza basata sulla percezione del susseguirsi degli
eventi da noi osservati. Ora, anche se questa percezione ci consentisse di distribuire gli eventi stessi
secondo un ordine crescente di << prima-dopo >> ovviamente, una tale scala temporale sarebbe
puramente qualitativa, oltre che soggettiva (tempo fisiologico). Si rende quindi necessario eliminare
dal concetto di tempo ogni elemento fisiologico e concretizzarlo in quello di grandezza fisica (tempo
fisico). In fisica, pertanto, il tempo si considera ente primitivo e si definisce operativamente, come
grandezza fondamentale, la durata o intervallo di tempo, cioè la differenza tra due tempi detti,
rispettivamente, istante finale e istante iniziale. Ovviamente, nella scala dei tempi qualsiasi istante si
può scegliere come riferimento e porlo, per convenzione, eguale a zero.
Come unita di misura dell'intervallo di tempo é stato scelto il secondo solare medio (s)
La massa e la sua unità di misura
Una caratteristica dei corpi e la loro massa che solitamente viene definita come la quantità di materia
contenuta nei corpi stessi.
Per effettuare le operazioni che conducono alla misura della massa eguali o diversi intervalli di
tempo. di un corpo si può usare la bilancia.
Con tale strumento si pub stabilire:
1) se due masse sono eguali o diverse.
2) qual é la somma di due o più masse.
UNITA DI MISURA DELLA MASSA
Come unità di misura della massa é stato scelto il chilogrammo (kg) cosi definito:
il chilogrammo é la massa di un blocchetto cilindrico di platino-iridio conservato nell’Archivio
Internazionale di Pesi e Misure di Sévres presso Parigi.
Grandezze scalari e grandezze vettoriali
Il numero che rappresenta la misura della grandezza seguito dall’unità di misura è detto: Modulo o
Intensità della grandezza. Tali grandezze sono dette Scalari.
Per tutte le grandezze per la cui definizione non occorrono altri elementi per la loro definizione
all’infuori del modulo o l’intensità sono dette Grandezze Scalari.
Se per esempio consideriamo un punto materiale (rappresentazione grafica di un punto che non ha
dimensione) può compiere degli spostamenti. Per descrivere tale grandezza fisica c’è bisogno di
introdurre altri elementi.
Per determinare lo spostamento di un punto materiale nello spazio c’è bisogno di introdurre altre
grandezze oltre al modulo o intensità, questo perché nello spazio il punto materiale può compiere
infiniti spostamenti in qualsiasi direzione ed in qualsiasi verso sempre con lo stesso modulo.
Quindi per definire lo spostamento di un punto materiale si introdurranno altre due elementi:
la direzione ed il verso.
Tutte le grandezze per le quali oltre al modulo o intensità per la loro definizione c’è bisogno anche di
direzione e verso, sono dette Grandezze Vettoriali
DEFINIZIONE DI VETTORE
Il vettore è un segmento orientato nello spazio individuato mediante i seguenti elementi
caratteristici: direzione, verso, e intensità o modulo.
pag. 4
In conclusione possiamo dire che lo spostamento è una grandezza vettoriale.
Cenni di calcolo vettoriale
a) SOMMA DI VETTORI
Dati due vettori V1=OV1 e V2=OV2 applicati ad uno stesso punto O e formanti un certo angolo, si
definisce Vettore Somma o Risultante il vettore V=OV individuato dalla diagonale del
parallelogramma che ha per lati i vettori assegnati (regola del parallelogramma).
Se i vettori sono più di due il vettore somma è dato dal lato di chiusura del poligono avente come lati
i vettori assegnati (regola del poligono).
b) DIFFERENZA DI DUE VETTORI
Si definisce vettore opposto al vettore dato il vettore che ha la stessa intensità, la stessa direzione,
ma verso contrario. Dati due vettori V1=OV1 e V2=OV2 applicati allo stesso punto O e formanti un
certo angolo, si definisce differenza dei due vettori il vettore V=OV ottenuto dalla somma vettoriale
di V1 e dell’opposto di V2.
pag. 5
c) PRODOTTO DI UNA GRANDEZZA SCALARE PER UN VETTORE
Dato un vettore V=OV ed un numero reale n (scalare) si definisce prodotto di una grandezza scalare
per un vettore il U=nxV avente la stessa direzione del vettore V, lo stesso verso, e intensità = nxV.
d) SCOMPOSIZIONE DI UN VETTORE IN DUE DI DIREZIONE ASSEGNATE
Dato un vettore V=OV e due direzioni Or1 ed Or2, dall’estremo V conduciamo le parallele alle due
direzioni, e i punti V1 e V2, individuati su r1 e r2 determinano i vettori V1=OV1, e V2=OV2
(procedimento inverso alla somma).
Metodi di misurazione delle grandezze Fisiche
Come si é visto, la determinazione quantitativa di una grandezza fisica si effettua attraverso la
misurazione, operazione il cui risultato é la misura che esprime il rapporto tra la grandezza da
misurare ed un'altra grandezza ad essa omogenea, presa come unità di misura.
La misurazione di una grandezza fisica può essere effettuata seguendo tre metodi diversi.
a) Metodo di misurazione diretta: è’ detto anche metodo di misurazione relativa e consiste nel
confrontare la grandezza che si vuole misurare con un'altra della stessa specie scelta come
campione o unità di misura. Questo metodo si applica per la misurazione delle grandezze
fondamentali.
b) Metodo di misurazione indiretta: è detto anche metodo di misurazione assoluta e consiste nel
determinare il valore della grandezza in esame misurando direttamente le altre grandezze da cui
essa dipende secondo una relazione ben definita.
pag. 6
Così, per esempio, per misurare il volume di un corpo a forma cilindrica si misurano diretta mente
l'altezza h ed il raggio r del cilindro e mediante la formula V = π r2 h se ne ricava il volume.
c) Metodo di misurazione con strumenti tarati: questo metodo consiste nell’impiego di strumenti
tarati, cioè di particolari dispositivi muniti di scale e di indici le cui indicazioni sono state
controllate in base alla misurazione diretta o indiretta delle grandezze in esame; tale operazione
viene detta taratura dello strumento.
Calcolo degli errori
Per determinare la misura delle grandezze fisiche il metodo più: diffuso é quello con strumenti tarati
in quanto la misura stessa si riconduce alla osservazione della posizione di indici su scale, operazione
che si può eseguire con elevata precisione.
Se si ripetono varie volte le misurazioni di una grandezza fisica, si otterranno dei valori x1, x2,,,xn
che, in generale, differiscono tra loro.
Seguendo il principio della media di Gauss (o aritmetica), si assumerà come valore più probabile della
grandezza in esame il valore dato dalla media aritmetica
X=x1+x2+,,,+xn/n
E bene osservare che non esistono misure esatte in quanto in ogni misurazione si commettono degli
errori che possono essere accidentali o sistematici.
Gli errori accidentali dipendono da circostanze perturbatrici fortuite; essi influiscono nelle misure,
ottenute eseguendo una serie di misurazioni di una grandezza fisica, ora in un senso, ora nell’altro e
con intensità variabile. Dato che gli errori accidentali sono legati ad altri fenomeni non controllabili
che si sovrappongono al fenomeno in esame influenzandolo in modo del tutto casuale, essi non si
possono mai eliminare (esempio differenza di temperatura a causa della quale gli strumenti si
dilatano o si restringono ecc.).
Gli errori sistematici sono quelli che dipendono da difetti costruttivi degli strumenti, vizi nel metodo
usato, particolare comportamento dell'osservatore, ecc.. Essi influiscono sul risultato sempre nello
stesso senso e con la stessa intensità e si possono eliminare o ridurre variando i metodi, gli strumenti
e gli osservatori.
Il calcolo degli errori presuppone la conoscenza del valore vero della grandezza da misurare; poiché
ciò é impossibile, si ricorre ai calcolo del valore più probabile delle varie misure. Se non e richiesta
una elevata precisione e se le misure sono poco numerose, é sufficiente calcolare l'errore assoluto
massimo dato dalla semidifferenza tra il valore massimo XM ed il valore minimo Xm delle misure
ottenute:
a=XM-Xm/2
Tenendo conto dell'errore assoluto, la misura della grandezza in esame si esprime con la notazione:
X=X+/- a
pag. 7
Più significativo dell'errore assoluto, per stimare la precisione di una misura, é l'errore relativo
definito dal rapporto tra l'errore assoluto e il valore medio della grandezza; cioè:
r= a/X
Se poi si vuole l’errore relativo percentuale, basta moltiplicare per cento quello relativo.
Supponiamo, ad esempio, di aver misurato la massa di un anello d'oro con una bilancia d'analisi,
avente la sensibilità di un milligrammo, e di aver eseguito 6 misurazioni i cui risultati sono:
m1 = 7,580 g m2 = 7,583 g m3 = 7,530 9
m4 = 7,581 g m5 = 7,584 g m6 = 7,530 9
La media aritmetica dei sei valori da il valore della massa del corpo:
m = m1 +m2+m3+m4+m5+m6 / 6 =7,581 g
l’errore assoluto massimo è: a = 7,584-7,582 / 2 = 0,002 g
La massa dell’anello sarà: m = (7,581 +/- 0,002) g
L’errore percentuale sarà: 0,0026%
pag. 8
Introduzione alla meccanica
La meccanica
La meccanica é Ia più antica delle scienze fisiche: essa infatti si occupa del movimento e questo è uno
dei fenomeni naturali che per primo ha destato l'interesse dell'uomo.
Di solito la meccanica si suddivide in tre parti:
1. la cinematica che studia il movimento dei corpi senza tener conto delle cause che Io
producono;
2. Ia dinamica che studia il movimento dei corpi e Ie sue cause;
3. la statica che studia le condizioni di equilibrio dei corpi.
Nell'idea di movimento sono intimamente legati i concetti primitivi di posizione e di tempo.
Un corpo é in movimento se la sua posizione, misurata dalla distanza da un altro corpo, considerato
fisso, varia al variare del tempo.
Cosi, per esempio, stando nel vagone di un treno, diciamo di essere in movimento quando la nostra
posizione, rispetto a quella della strada ferrata, cambia istante per istante. Ma noi possiamo anche
muoverci all'interno del vagone che é in movimento rispetto alla strada ferrata, la quale, a sua volta,
essendo fissata alla Terra, é in movimento rispetto al Sole e cosi via.
E facile capire che se riferissimo il nostro movimento al Sole, anziché alle pareti del vagone, il
movimento stesso risulterebbe molto complicato. D'altra parte non potendo stabilire l'esistenza di
un qualcosa che occupi nell'universo sempre la stessa posizione, non ha significato parlare di moto
assoluto e, pertanto, il moto di un corpo é sempre relativo, cioè riferito ad un altro corpo
arbitrariamente scelto, che si considera fisso e che viene detto sistema di riferimento.
Sistemi di riferimento
Come é stato precisato nel paragrafo precedente un corpo si muove relativamente ad un sistema di
riferimento quando la sua posizione varia nel tempo.
Ora, per determinare il movimento di un corpo, bisognerebbe conoscere il movimento di ciascuna
particella di cui esso é costituito e ciò ovviamente, è impossibile.
Pertanto, in una prima trattazione del movimento di un corpo, prescinderemo dalle sue dimensioni,
dalla sua forma, dalla sua costituzione chimica, eccetera, e Io considereremo come un punto, che
chiameremo punto materiale o particella.
Si tenga però sempre presente che il punto materiale, per definizione privo di estensione, é una
astrazione accettabile in quei casi in cui si rende necessaria una notevole semplificazione dei
problemi che si debbono risolvere.
Per quanto riguarda il sistema di riferimento, sceglieremo una terna di assi cartesiani ortogonali XYZ
aventi l'origine in un punto O e fissa nello spazio. Ai fini pratici tale terna di assi si considera solidale
con Ia Terra e viene detta sistema di riferimento terrestre o da laboratorio.
Riferendoci alla figura diciamo che un punto materiale P é in quiete o in moto quando le sue
coordinate, cioè Ie distanze x, y e z, rispettivamente, dai piani YZ, X2 e XY, si mantengono costanti o
variano nel tempo.
pag. 9
Se il punto P é in movimento, per conoscere istante per istante la sua posizione, debbono essere
note le coordinate x, y e z dei punto stesso in funzione del tempo t.
Il luogo delle posizioni occupate dal punto P durante il suo movimento é una linea a cui si da il nome
di traiettoria; questa può essere una retta o una curva. Nel primo caso il moto si dice rettilineo, nel
secondo caso curvilineo.
Quando il moto del punto materiale avviene in un piano, il sistema di riferimento si riduce a due assi
cartesiani ortogonali XY di origine O, appartenente al piano su cui si muove il punto stesso.
Se infine il moto del punto avviene lungo una retta, il sistema di riferimento si riduce ad un solo asse
X di origine O.
pag. 10
A chiarimento di quanto detto facciamo un esempio.
Supponiamo che un punto materiale si muova su un piano e che, relativamente al sistema di assi
cartesiani ortogonali XY di origine O, siano note le coordinate del punto in funzione del tempo:
x=15t,
y=—5t2
Moto di un punto materiale definito dalle relazioni: x = 15 t, y = — 5t2.
In questo caso il movimento del punto é perfettamente individuato in quanto si può conoscere la sua
posizione in qualsiasi istante.
Le prime grandezze che caratterizzano il movimento:
velocità e accelerazione
a) Velocità.
Riferito al movimento dei corpi, il concetto di velocità esprime intuitivamente la rapidità con cui
varia la loro posizione; in esso, quindi, sono contenuti i concetti primitivi di lunghezza e di tempo.
Cosi, per esempio, diciamo che un'auto é tanto più veloce quanto minore e il tempo che impiega a
compiere un dato percorso.
Il cammino che effettivamente percorre un punto materiale in movimento si suole chiamare, anche
se impropriamente, spazio percorso.
Non si confonda pero Io spazio percorso da un punto materiale, che é una grandezza scalare, col suo
spostamento, che é una grandezza vettoriale, il cui modulo e dato dalla distanza tra una data
posizione P0 occupata dal punto materiale ed un'altra posizione P, indipendentemente dal modo
come il punto passa da Po a P, e avente la direzione della retta P0-P e verso da P0 a P.
Volendo precisare il concetto di velocità da un punto di vista quantitativo, si può procedere nel modo
seguente. Sia L la traiettoria che descrive il punto materiale in movimento; fissato su L un punto O
come riferimento, siano P0, e P le posizioni occupate dal punto mobile negli istanti t0 e t; poniamo
OP = s0 ed OP=s
pag. 11
Il rapporto tra la lunghezza dell'arco PP0 = (s — s0) percorso e l'intervallo di tempo (t — t0)
impiegato a percorrerlo, definisce la velocità scalare media.
VELOCITA SCALARE MEDIA
La velocità scalare media di un punto materiale in movimento é il rapporto tra lo spazio da esso
percorso ed il tempo impiegato a percorrerlo.
Considerando intervalli di tempo (t — t0) via via più piccoli, le posizioni P0 e P, occupate dal punto
materiale in movimento, sono sempre più: vicine; si troveranno cosi velocità medie scalari tendenti
ad un valore limite che si chiama velocità scalare istantanea.
Precisiamo che la velocità, cosi come é stata definita, é una grandezza fisica derivata da una
lunghezza e da un intervallo di tempo; di conseguenza la sua unita di misura nel SI è il metro al
secondo (m/s)
Chiariamo il concetto di velocità scalare media considerando, per esempio, il moto di un ciclista
lungo una pista.
Scelta la posizione O come riferimento, fissiamo mediante un orologio l'istante t0 in cui il ciclista
passa per la posizione A: sia, per esempio, t0 = 30 s. Segniamo quindi l'istante t in cui il ciclista stesso
passa per la posizione B e sia, per esempio, t = 40 s.
Misuriamo gli spazi so = OA ed s = OB e siano rispettivamente so = 125 m ed s = 245 m. La velocità
scalare media del ciclista nel tratto AB é:
pag. 12
Nella definizione di velocità scalare non vengono precisati la direzione ed il verso del movimento del
punto materiale. Per arricchire il concetto di velocita é conveniente considerare la velocità stessa
come grandezza vettoriale.
Sia L la traiettoria descritta dal punto materiale in movimento; fissato su L un punto O come origine e
scelto come verso positivo quello antiorario, siano P0 e P le posizioni occupate dal punto stesso negli
istanti t0 e t. Se i vettori s0 = OP0 ed s = OP rappresentano, rispettivamente, gli spostamenti negli
istanti considerati, il vettore
definito dal rapporto tra lo spostamento P0P= (s — s0), e l'intervallo di tempo (t – t0) in cui tale
spostamento é avvenuto, rappresenta la velocità vettoriale media.
VELOCITA VETTORIALE MEDIA
La velocità vettoriale media di un punto materiale in movimento é il rapporto tra lo spostamento
da esso subito ed il tempo durante il quale é avvenuto lo spostamento stesso.
Considerando intervalli di tempo (t — t0) via via più piccoli, le posizioni P0, e P, occupate dal punto
materiale in movimento, sono sempre più vicine; si troveranno, pertanto, velocità vettoriali medie
tendenti ad un valore limite V che si chiama velocità vettoriale istantanea.
pag. 13
La velocità vettoriale istantanea nel punto P0 si può rappresentare con un vettore V di origine in P0,
avente direzione tangente alla traiettoria in P0, verso coincidente con quello del movimento e
intensità eguale a quella della velocità scalare istantanea.
b) Accelerazione.
Il concetto di velocità da solo non basta per caratterizzare il movimento di un punto materiale;
occorre anche conoscere come essa varia istante per istante. Siano v0 e v rispettivamente le velocità
di un punto materiale nell'istante t0 in cui occupa la posizione P0, e nell'istante t quando occupa la
posizione P.
Il rapporto tra la variazione di velocità (v – v0), subita dal punto materiale in movimento ed il
corrispondente intervallo di tempo (t — t0) in cui tale variazione avviene, é l'altra grandezza
vettoriale che insieme alla velocità caratterizza il movimento: essa viene detta accelerazione media.
ACCELERAZIONE MEDIA
L'accelerazione media é il rapporto tra la variazione di velocità subita da un punto materiale in
movimento ed il tempo durante il quale é avvenuta detta variazione.
Considerando intervalli di tempo (t — to) sempre più piccoli si avranno accelerazioni medie sempre
più vicine ad un valore limite che si chiama accelerazione istantanea.
Precisiamo che l'accelerazione si può definire anche come la variazione di velocità subita da un punto
materiale in movimento nell'unità di tempo.
La sua unità di misura nel SI é il metro al secondo al quadrato (m/s2).
Poiché la velocità di un punto materiale in movimento può variare sia di intensità che di direzione, si
definiscono due tipi diversi di accelerazione.
Sia a il vettore che rappresenta l'accelerazione istantanea di un punto materiale quando occupa la
posizione P della traiettoria L su cui si muove. Scomponiamo tale vettore in due vettori uno at, in
direzione della tangente in P alla traiettoria ed uno an in direzione della normale in P alla traiettoria
pag. 14
stessa; i vettori at, ed an , vengono detti, rispettivamente, accelerazione tangenziale ed
accelerazione centripeta o normale.
L'accelerazione tangenziale esprime la variazione di intensità della velocità nell'unità di tempo
mentre l'accelerazione centripeta esprime la variazione di direzione della velocità nell'unità di
tempo.
pag. 15
Leggi della dinamica e gravitazione universale
Considerazioni preliminari
Consideriamo una pallina di ferro appoggiata su un tavolo orizzontale e in quiete relativamente ad
esso. L'esperienza mostra che affinché la pallina si metta in movimento rispetto al tavolo occorre una
causa esterna, che potrebbe essere una piccola spinta, l'azione di una molia, l'attrazione di una
calamita, o semplicemente la mancanza del vincoio, che é il tavolo. In quest'ultimo caso il movimento
della pallina é dovuto all'attrazione che la Terra esercita su di essa.
Supponiamo ora che la pallina si muova su una guida rettilinea. Anche questa volta l'esperienza
mostra che per variare la sua velocita, o per fermarla, occorre una causa esterna che potrebbe essere
l'azione esercitata da un ostacolo posto sul cammino della pallina o semplicemente l'attrito.
In ogni caso, possiamo dire che la variazione di velocità della pallina non e mai un fatto spontaneo e
richiede sempre una determinata causa. Osserviamo inoltre che, finché la pallina é appoggiata sul
tavolo, essa resta ferma non perché viene a mancare l’attrazione da parte della Terra, ma in quanto
c'é il tavolo a impedirne il movimento. In questo caso si puo constatare che la causa che metterebbe
in movimento la pallina, se fosse libera, si manifesta, invece, attraverso Ie deformazioni che
subiscono sia la pallina che il tavolo. Dalle osservazioni fatte, possiamo dire che:
la forza é la causa della variazione di velocita o della deformazione che subisce un corpo al quale
viene applicata la forza stessa.
II concetto di forza e quelli di massa e acceierazione sono alla base della dinamica, cioe del moto e le
sue cause. Questa indagine si fonda su tre leggi o principi che furono enunciati dal fisico inglese Isaac
Newton (1642-1727) in forma assiomatica nella sua opera <<PhiIosophiae naturalis principia
mathematica» pubblicata nell'anno 1687.
Occorre sottolineare che nella formulazione delle leggi della dinamica di Newton i corpi vanno
considerati come particelle o punti materiali e la loro massa é ritenuta costante durante il loro
movimento (meccanica classica o di Galilei-Newton).
Il principio d’inerzia
La prima legge della dinamica di Newton è nota storicamente come legge o principio d’inerzia.
Essa fu intuita da Galileo Galilei come conseguenza dei suoi studi sul moto dei gravi lungo un piano
inclinato quando, in particolare, l'angolo di inclinazione del piano stesso é nullo (piano orizzontaie).
Lanciando un grave su una superficie orizzontale, il grave stesso procede con velocita gradualmente
decrescente; Galilei comprese che tale variazione di velocita era dovuta aIl'attrito e alla resistenza
dell'aria. Riducendo via via tali resistenze, il moto tende sempre ad un moto rettilineo uniforme; nel
caso ideaie che queste resistenze venissero completamente eliminate, il corpo dovrebbe procedere
sempre con velocita costante in intensità, direzione e verso.
Nei caso di un corpo inizialmente fermo su un piano orizzontaie é evidente che in assenza di forze
esso perseveri nel suo stato di quiete. Questo fatto era gia noto sin dai tempi di Aristotele per il quale
non era altrettanto evidente come un corpo si potesse mantenere in movimento senza l'intervento di
una forza esterna. Bastava pero una analisi piu approfondita per riconoscere che tutti i movimenti si
estinguono, se non sono sostenuti da forze attive, a causa delle forze passive (attrito e resistenza
pag. 16
dell'aria). Cio fu compreso, come si è detto, prima da Galilei e successivamente da Newton, al quale
si deve la formulazione definitiva del principio d'inerzia che si puo ritenere ancora valida.
PRINCIPIO D'lNERZlA (prima legge della dinamica o di Newton)
Un corpo rimane nel suo stato di quiete o di moto rettilineo uniforme sino a quando non agiscono
su di esso forze esterne.
Concludiamo facendo presente che il principio di inerzia non puo essere verificato sperimentalmente
in quanto non si riesce ad isolare in maniera completa alcun corpo o sistema di corpi in movimento.
La legge fondamentale della dinamica
Come abbiamo detto nel precedente paragrafo, se ad un corpo, inizialmente fermo o in moto
rettilineo uniforme rispetto ad un sistema di riferimento, non viene applicata alcuna forza, esso
continua a mantenere il proprio stato di quiete o di moto rettilineo uniforme.
Se pero il corpo é soggetto ad una forza, si osserva che la sua velocita cambia istante per istante; cio
vuol dire che, per effetto della forza, il corpo subisce una accelerazione.
Come si comportano corpi aventi massa differente quando vengono soggetti separatamente
all'azione di una stessa forza?
Per rispondere a tale domanda ci serviremo del dispositivo sperimentale in figura costituito da un
carrello A che puo essere messo in movimento su una guida rettilinea ed orizzontale.
Dopo aver determinato la massa m del carrello, poniamo il carrello stesso nella posizione M ed
applichiamo ad esso una forza tramite il pesetto P, legato al filo f che passa per la gola della carrucola
C. Poiché il carrello é libero di spostarsi lungo la guida, esso, sotto l'azione di tale forza, si mettera in
movimento. Misuriamo l'intervallo di tempo occorrente per portare il carrello dalla posizione di
quiete M in un'altra posizione N e calcoliamo la velocita del carrello stesso nell'istante in cui passa
per N.
In questo modo si puo determinare l'accelerazione del carrello mediante il rapporto tra la variazione
della velocita da esso subita nel passare da M ad N ed il corrispondente intervallo di tempo; sia a il
pag. 17
modulo di questa accelerazione. Mettiamo ora sul carrello dei blocchetti B in modo da farne variare
la massa e ripetiamo piu volte l'esperienza lasciando invariato il pesetto P e, quindi, la forza applicata
al carrello.
Se m1, m2, m3, sono, per ciascuna esperienza, Ie masse complessive (carrello più blocchetti)e se a1,
a2, a3, sono i corrispondenti valori dell'accelerazione, si verifica, entro i Iimiti degli errori
sperimentali, che i prodotti m1xa1, m2xa2, m3xa3, risultano tutti eguali tra loro ed al prodotto mxa
trovato inizialmente; si ha quindi:
m1xa1 = m2xa2 = m3xa3 = ma.
Sulla base dei fatti sperimentali esaminati, possiamo stabilire che, sottoponendo corpi diversi alla
stessa forza, il prodotto della massa m di ciascun corpo per l'accelerazione a da esso subita si
mantiene costante.
Tale prodotto, che indicheremo con F, si puo prendere come valore della forza stessa, cioé:
F=mxa (3-1)
L'esperienza mostra inoltre che la forza e l'accelerazione hanno Ia stessa direzione e Io stesso verso.
Tenendo presente che la massa di un corpo è una grandezza scalare mentre la forza e l'accelerazi0ne
sono grandezze vettoriali, la (3-1) si scrivera:
F=mxa (3-2)
La (3-2) e l'equazione fondamentale della dinamica; essa esprime la Iegge fondamentale della
dinamica o seconda Iegge di Newton.
pag. 18
LEGGE FONDAMENTALE DELLA DINAMICA (seconda legge della dinamica o di Newton)
La forza applicata ad un corpo libero di muoversi nella direzione della forza é uguale al prodotto
della massa del corpo per I'accelerazione che esso subisce.
Prima di chiudere questo paragrafo facciamo an cora due osservazioni:
1) se ad uno stesso corpo si applicano successivamente forze diverse, si verifica che le accelerazioni
da esso subite sono direttamente proporzionali alle intensita delle forze stesse: cio vuol dire che Ia
massa di un corpo si mantiene costante ed é una sua caratteristica;
2) se a corpi aventi massa diversa si applicano forze eguali, le accelerazioni da essi subite sono
inversamente proporzionali alle loro masse: cio vuol dire che la massa dei corpi è un ostacolo al loro
movimento o, in termini più appropriati, che la massa dei corpi é la misura della loro inerzia.
Per questa sua caratteristica la massa viene detta massa inerziale mentre quella misurata con una
bilancia e detta massa pesante o gravitazionale.
Nel Sistema internazionale la forza e una grandezza derivata: infatti, come abbiamo visto, essa viene
definita, in base alla relazione (3-1), come prodotto della massa per l'accelerazione.
La sua unita di misura é il newton (N) del quale si puo dare la seguente definizione:
il newton é l'intensita di quella forza che agendo su un corpo avente la massa di 1 kg gli imprime
l'accelerazione di 1 m/s2.
La legge di gravitazione universale
Prendendo in esame le ieggi sul moto dei pianeti che Keplero, in seguito alle osservazioni fatte
dall'astronomo Tycho Brahe, aveva formulato empiricamente, Newton pervenne nel 1687 alla legge
di gravitazione universale.
LEGGE DI GRAVITAZIONE UNIVERSALE
Tra due corpi aventi rispettivamente massa m1 ed m2, i cui centri si trovano alla distanza r. si
esercita una forza di mutua attrazione agente in direzione della retta congiungente i centri stessi e
Ia cui intensità é direttamente proporzionale al prodotto delle masse ed inversamente
proporzionale al quadrato della Ioro distanza.
nella quale G é una costante che viene detta costante di gravitazione universale.
ll valore di tale costante fu determinato per via sperimentale Ia prima volta da Lord Cavendish nel
1798; riferendoci al SI e alle misure più recenti, si ha: G = 6,673x10-11 Nm2/kg2
pag. 19
Leggi di Keplero:
1) Tutti i pianeti si muovono su orbite eilittiche di cui il Sole occupa uno dei fuochi.
2) Le aree descritte dai raggi vettori congiungenti ciascun pianeta con il Sole sono direttamente
proporzionali ai tempi impiegati a descriverle.
3) I quadrati dei periodi di rivoluzione di ciascun pianeta sono direttamente proporzionali ai cubi
degli assi maggiori delle Ioro orbite.
La legge di gravitazione universale é stata, e continua ad essere, alla base del progresso della
meccanica astronomica e terrestre. Cosi il pianeta Nettuno fu scoperto nel 1846 in quanto la sua
esistenza era stata prevista da Leverrier per spiegare, in base alla legge di gravitazione universale, Ie
perturbazioni dell'orbita del pianeta Saturno; analogamente é awenuto per Ia scoperta del pianeta
Plutone fatta nel 1930.
Sebbene ancora oggi non si conosca l'ente fisico da cui traggono origine e si trasmettono le forze
gravitazionali, la legge di Newton occupa un posto preminente nel campo della meccanica. Essa e
ancora alla base del calcolo delle orbite dei satelliti artificiali e della programmazione dei viaggi che le
astronavi gia compiono nell'esplorazione del sistema solare.
Il peso dei corpi. Differenza tra massa e peso. La massa della Terra
Lasciando cadere un corpo di massa m entro un Iungo tubo in cui é stato fatto il vuoto e disposto
verticalmente, si puo provare che l'accelerazione del corpo si mantiene costante.
In base alla legge fondamentale della dinamica detta accelerazione non puo essere provocata che da
una forza, diretta verso ii basso secondo Ia verticale. Tale forza, come gia abbiamo avuto occasione di
dire, é il peso del corpo e l'accelerazione é quella di gravità.
Pertanto, se P é il peso dei corpo e g l'accelerazione di gravita, in base alla (3-1) si ha:
P = mg (3-16)
Ma il peso dei corpo non e altro che la forza di attrazione che la Terra esercita sul corpo stesso;
indicando allora con M Ia massa della Terra e con r la distanza tra il suo centro e quello dei corpo, per
Ia legge di gravitazione universale, dev'essere:
P=GxMm/r2 (3-17)
Da questa relazione si vede che il peso di un corpo e inversamente proporzionale al quadrato della
sua distanza dal centro della Terra. Per il fatto poi che la Terra non é perfettamente sferica e ruota
intorno al proprio asse, il peso di un corpo varia oltre che con l'a|titudine anche con Ia latitudine.
In conclusione possiamo dire che:
mentre la massa di un corpo si mantiene costante, il suo peso invece varia da luogo a luogo e di
conseguenza non é una grandezza caratteristica del corpo.
Dal confronto delle relazioni (3-16) e (3-17) si ha:
Mg=GxMm/r2
Da cui
g=GxM/r2
Pertanto i'accelerazione di gravità e indipendente dalla massa dei corpo ed e inversamente
proporzionale al quadrato della sua distanza dal centro della Terra.
pag. 20
Dalla relazione nota l'accelerazione di gravità g dei iuogo e Ia distanza r si puo determinare la massa
M della Terra.
Riferendoci, per esempio, al livello dei mare e prendendo come valori medi di g e r, rispettivamente,
9,8 m/s2 e 6371x103 m, risulta:
9 8. (6371x103)2/(6.67x10-11) = 5.96x1024 kg
pagina - 1 ___________________________________________________________________________________
Forze
Massa e Peso
Il *peso* P di un oggetto è la forza gravitazionale che attira l'oggetto stesso. Sulla
Terra il peso è equivalente alla forza con la quale la Terra attira a sè un oggetto; è
equivalente alla *massa* M di un oggetto per l'accelerazione locale di gravità g.
Massa:
M
* Accelerazione dovuta alla gravità *:
g = 9.81
m
sec2
Peso:
P M.g
Che massa ha un astronauta, che pesa 687.newton sulla Terra?
P 687.newton
Per trovare la massa di un oggetto dal suo peso, dovete semplicemente dividere per g:
M
P
g
M = 70 kg
Qual è il peso dell’astronauta sulla Luna?
pagina - 2 ___________________________________________________________________________________
Sulla superficie della luna, l'accelerazione dovuta alla gravità è:
g luna 1.62.
m
sec2
Così, mentre la massa dell'astronauta sulla luna è la stessa, il suo peso è diverso:
P M.g luna
P = 113 newton
pagina - 3 ___________________________________________________________________________________
Forze
Forze di attrito
La forza di attrito è una forza *tangenziale* che si oppone allo scorrimento di una
superficie sopra un'altra superficie. La massima forza di opposizione, che ostacola un
oggetto nello *scivolamento* su di una superficie, è chiamata forza di attrito
statico f s. La forza contraria che deve essere vinta per trattenere l'oggetto che scivola
è la forza di attrito dinamico f k.
Le forze di attrito sono proporzionali alla forza normale N che agisce
perpendicolarmente alle superfici di scivolamento; le costanti di proporzionalità sono
chiamate rispettivamente *coefficiente di attrito statico* μ s e *coefficiente di
attrito dinamico* μ k.
Coefficiente di attrito statico:
μs
Coefficiente di attrito dinamico:
μk
Forza normale:
N
Massa:
M
Massima forza di attrito statico:
pagina - 4 ___________________________________________________________________________________
f s μ s.N
Forza di attrito dinamico:
f k μ k.N
Peso:
W M.g
State cercando di spingere un frigorifero di 70.kg su un pavimento di linoleum dove
il coefficiente di attrito statico è 0.6 ed il coefficiente di attrito dinamico è 0.4.
Quanto forte dovrete spingere (in una direzione orizzontale) per ottenere lo
spostamento del frigorifero? Quanto dovrete spingere per mantenere il movimento?
M 70.kg
μ s 0.6
μ k 0.4
Il pavimento è una superficie piana e le sole forze che agiscono verticalmente sul
frigorifero sono il suo peso e la forza normale del pavimento che sostiene il
frigorifero. Queste due forze devono essere uguali e la forza normale è uguale al
peso. Al punto in cui il frigorifero sta per scivolare, la forza orizzontale che esercitate
deve equivalere esattamente alla forza dell'attrito statico opposta allo scivolamento,
così:
W M.g
NW
F μ s.N
F = 412 newton
Per mantenere il movimento del frigorifero, dovete esercitare una forza più grande
della forza dell'attrito dinamico, che è:
F μ k.N
F = 275 newton
pagina - 5 ___________________________________________________________________________________
Forze
Cubo su di un piano inclinato senza attrito
Un cubo posato su un piano inclinato privo di attrito incontra due forze. Una è la
forza di gravità (il peso del cubo), che agisce sul cubo stesso in direzione verticale.
La seconda è la forza normale del piano, che spinge sul cubo in una direzione
perpendicolare alla superficie del piano inclinato. In assenza di attrito, il cubo
semplicemente scorre lungo il piano, in base alla Seconda Legge di Newton. La
tecnica per determinare l'accelerazione del cubo lungo il piano è molto comune e
molto usata sia in fisica che in ingegneria.
Massa dell'oggetto che scivola:
M
Accelerazione dell'oggetto che scivola lungo il piano:
ax
Angolo del piano inclinato:
θ
Un cubo di massa 50.kg è posizionato su una superficie priva di attrito, inclinata con
un angolo di 40.deg in orizzontale. Qual è lo spostamento del cubo?
M 50.kg
θ 40.deg
Il primo passo è disegnare un *diagramma di un corpo-libero* che mostra le forze
che agiscono sul cubo.
pagina - 6 ___________________________________________________________________________________
Conviene scegliere le coordinate degli assi nelle direzioni lungo il piano inclinato e
perpendicolare al piano. Lungo la direzione y (perpendicolare al piano) la
componente del peso del cubo è in discesa e la forza normale è verso l'alto. Affinché
il cubo non scappi via né sprofondi attraverso il piano inclinato, la somma di queste
forze deve essere uguale a zero:
N M.g.cos θ 0
Nella direzione x (lungo il piano) la sola forza agente sul cubo è l'altra componente
del suo peso. Questa forza fornisce al cubo una accelerazione a x lungo il piano:
M.g.sin θ M.a x
Risolvendo questa equazione per a x avremo:
a x g.sin θ
a x = 6.3
m
sec2
pagina - 7 ___________________________________________________________________________________
Forze
Cubo su un piano inclinato, con attrito
Un cubo che scivola lungo un piano inclinato incontra tre forze. Una è la forza di
gravità (peso) che agisce sul cubo in direzione verticale. La seconda è la forza
normale del piano, che spinge sul cubo in una direzione che è perpendicolare alla
superficie del piano inclinato. La terza forza è l'attrito, che si oppone al moto.
L'accelerazione a x della massa che scivola lungo un piano (inclinato ad un angolo θ)
è determinata dalla componente dell'accelerazione di gravità lungo il piano meno
l'effetto dell'attrito.
Massa dell'oggetto che scivola:
M
Accelerazione dell'oggetto che scivola lungo il piano:
ax
Angolo del piano inclinato:
θ
Coefficiente dell'attrito dinamico:
μk
Forza d'attrito:
f
Forza Normale:
N
Un cubo di massa 50.kg è posizionato su una superficie piana inclinata ad un angolo
di 40.deg in orizzontale. Il coefficiente dell'attrito dinamico tra il cubo e la superficie
è 0.6. Qual è lo spostamento del cubo?
M 50.kg
θ 40.deg
pagina - 8 ___________________________________________________________________________________
μ k 0.6
Il primo passo è disegnare un *diagramma di un corpo-libero* che mostra le forze
che agiscono sul cubo.
Il cubo scivola lungo il piano a destra, così la forza di attrito che si oppone al moto
deve agire verso l'alto lungo il piano a sinistra. Nella direzione y (perpendicolare al
piano) la componente del peso del cubo è verso il basso e la forza normale è verso
l'alto. Affinché il cubo non scappi via né sprofondi attraverso il piano inclinato, la
somma di queste forze deve risultare zero:
N M.g.cos θ 0
Nella direzione x (lungo il piano) bisogna includere la forza di attrito f lungo la
componente del peso del cubo. La risultante di queste forze equivale alla massa del
cubo moltiplicato per la sua accelerazione lungo il piano:
M.g.sin θ f M.a x
L'altra importante equazione che ci serve viene dalla sezione sulle forze di attrito,
che relaziona la forza di attrito f al coefficiente di attrito μ k moltiplicato la forza
normale N:
pagina - 9 ___________________________________________________________________________________
f μ k.N
f μ k. M.g.cos θ
Sostituendo nell'equazione delle forze nella direzione x, avremo:
M.g.sin θ μ k. M.g.cos θ M.a x
da cui l'accelerazione a x lungo il piano può allora essere trovata:
a x g.sin θ μ k.g.cos θ
a x = 1.8
m
sec2
pagina - 10 ___________________________________________________________________________________
Forze
Momento
Il Momento è una misura di come effettivamente una forza applicata può causare una
rotazione attorno a un asse di un * corpo rigido *.
Un momento che causa una rotazione antioraria è di segno positivo ed un momento
che causa una rotazione in senso orario è di segno negativo. Il momento τ è il
prodotto di una forza F, della distanza radiale r dall'asse di rotazione dell'oggetto al
punto di applicazione della forza e del seno dell'* angolo * θ tra r e F.
Forza:
F
Distanza radiale:
r
Angolo:
θ
Momento:
τ r.F.sin θ
Supponete di spingere una porta con una forza di 20.newton nella direzione mostrata
dalla figura. Qual è la risultante del momento τ?
F 20.newton
r 60.cm
θ 20.deg
pagina - 11 ___________________________________________________________________________________
τ r.F.sin θ
τ = 4.1 newton.m
Nel precedente esempio, cosa accade se θ 90.deg ? E' più facile o più difficile
aprire la porta?
τ r.F.sin θ
τ = 12 newton.m
La porta è più facile da aprire.
Nell'esempio 1 (con θ 20.deg), cosa accade se r 10.cm ? E' più facile o più
difficile aprire la porta?
τ r.F.sin θ
τ = 0.68 newton.m
La porta è più difficile da aprire.
pagina - 12 ___________________________________________________________________________________
Quantità di moto
La quantità di moto p di un oggetto è il prodotto della sua massa m per la sua velocità v. In assenza
di forze esterne (come la gravità), la quantità di moto misura la quantità di fatica necessaria per
cambiare la velocità di un corpo di una massa specificata.
E' più difficile cambiare la velocità di un oggetto che ha una grande quantità di moto di quella di un
oggetto con una quantità di moto più piccola.
Massa:
m
Velocità:
v
Quantità di moto:
p m.v
Un proiettile di massa m è sparato da un'arma con una velocità di v proiettile:
v proiettile 500.
m
sec
m 6gm
Quanto veloce deve camminare un uomo di media corporatura (massa M 68.kg) per avere la stessa
quantità di moto del proiettile?
La quantità di moto p del proiettile è
p m.v proiettile
p = 3 kg m sec 1
Per avere la stessa quantità di moto del proiettile l'uomo dovrà camminare ad una velocità di
v uomo
p
M
v uomo = 0.044 m sec 1
(una lenta camminata!)
Notate che, siccome la massa dell'uomo è molto più grande di quella del proiettile, egli deve muoversi
ad una bassissima velocità per avere la stessa quantità di moto del proiettile.
pagina - 13 ___________________________________________________________________________________
Quantità di moto
Conservazione della quantità di moto
Se due o più oggetti sono isolati da tutte le forze esterne così che le sole forze che
agiscono su di essi sono quelle che essi esercitano l'uno sull'altro, la somma vettoriale
delle quantità di moto di questi oggetti è costante nel tempo. Così, in un sistema
meccanico isolato, la quantità di moto totale è conservata. Questo concetto è spesso
applicato alle collisioni dove la quantità di moto totale prima dell'impatto è uguale
alla quantità di moto totale dopo l'impatto.
Massa del corpo 1: M 1
Massa del corpo 2: M 2
Velocità del corpo 1 prima dell'impatto: U 1
Velocità del corpo 2 prima dell'impatto: U 2
Velocità del corpo 1 dopo l'impatto: V 1
Velocità del corpo 2 dopo l'impatto: V 2
Quantità di moto iniziale del corpo 1:
P U1 M 1.U 1
Quantità di moto iniziale del corpo 2:
P U2 M 2.U 2
Quantità di moto finale del corpo 1:
P V1 M 1.V 1
Quantità di moto finale del corpo 2:
P V2 M 2.V 2
Conservazione della quantità di moto:
P V1 P V2 P U1 P U2
pagina - 14 ___________________________________________________________________________________
Due corpi stanno collidendo, come mostrato nella seguente figura:
Quando si assegnano i valori mostrati
nella figura alle attuali variabili,
bisogna ricordare di prestare
attenzione ai segni delle velocità.
Definiamo la velocità positiva essere
nella direzione di destra e la velocità
negativa essere nella direzione di
sinistra:
M 1 10.kg
U 1 20.
m
sec
V 2 5.
m
sec
M 2 5.kg
U 2 12.
m
sec
V 1 — da trovare
Per risolvere rispetto a V1, dovremo usare la legge della conservazione della quantità
di moto. La quantità di moto di questi due sistemi (corpi) prima dell'impatto dovrebbe
essere uguale alla quantità di moto dopo l'impatto:
M 1.U 1 M 2.U 2 M 1.V 1 M 2.V 2
Risolvendo rispetto a V1 avremo:
V1U1.
M2
M1
U2V2
Il segno positivo di questo risultato indica che il corpo 1 si sta muovendo verso
destra.
V 1 = 11.5
m
sec
pagina - 15 ___________________________________________________________________________________
Un proiettile di massa M proiettile è sparato da un cannone di massa M cannone con
una velocità di V proiettile :
M proiettile 10.kg
M cannone 4.ton
V proiettile 500.
m
sec
La velocità del contraccolpo del cannone V cannone deve essere calcolata dalla
conservazione della quantità di moto. Prima che il cannone sia attivato, le quantità di
moto sia del cannone che del proiettile sono zero. Dopo che il cannone ha sparato, la
quantità di moto totale (cannone + proiettile) è ancora zero per la conservazione della
quantità di moto:
V cannone.M cannone M proiettile.V proiettile 0
Risolvendo rispetto a V cannone avremo:
V cannone
M proiettile.V proiettile
M cannone
Il segno negativo di V cannone indica che il cannone ed il proiettile si muovono in
direzioni opposte uno rispetto all'altro.
V cannone= 1.38
m
sec
pagina - 16 ___________________________________________________________________________________
Lavoro, Energia e Potenza
Il lavoro
Per un oggetto che si muove in una dimensione, il lavoro W fatto sull'oggetto da una
forza costante applicata F è uguale al prodotto della componente della forza nella
direzione del moto dell'oggetto F x e lo spostamento Δx.
Intensità della forza:
F
Ampiezza dello spostamento:
Δx
Angolo tra la forza e il vettore spostamento:
θ
Componente della forza nella direzione del moto dell'oggetto:
F x F.cos θ
Lavoro:
W F x.Δx
pagina - 17 ___________________________________________________________________________________
Per questo esempio, avrete bisogno di ricordare che i e j sono vettori unità rispettivamente
nelle direzioni x ed y:
dimensione nella direzione x è uno
dimensione nella direzione y è zero
i
1
0
dimensione nella direzione x è zero
dimensione nella direzione y è uno
j
0
1
Un oggetto, sotto l'influenza di una forza vettore F, si muove dal punto P 1 al punto
P 2, come mostrato nella figura. Trovare il lavoro W compiuto sull'oggetto.
F 10.i 20.j .newton
P 1 1.2.i 3.j .m
P 2 4.i 6.j .m
Il lavoro W compiuto sull'oggetto può essere calcolato in
due modi.
Soluzione usando il calcolo vettoriale
Il vettore spostamento è
Δr P 2 P 1
Il lavoro compiuto dalla forza sull'oggetto è
W F.Δr
W = 88 newton. m
pagina - 18 ___________________________________________________________________________________
Soluzione usando Angoli ed Ampiezze
L'angolo della forza vettore è
θ F atan
F.j
F.i
L'angolo del vettore spostamento è
θ s atan
P 2 P 1 .j
P 2 P 1 .i
L'angolo tra la forza ed il vettore spostamento è
θθFθs
L'ampiezza dello spostamento è
sP2P1
Il lavoro è, quindi, uguale a
W F .s.cos θ
W = 88 newton. m
s = 4.104 m
θ = 16.46 deg
θ s = 46.975 deg
θ F = 63.435 deg
pagina - 19 ___________________________________________________________________________________
Lavoro, Energia e Potenza
Energia cinetica
L'energia cinetica K di un oggetto è l'energia posseduta dall'oggetto e dovuta al suo
moto. La variazione di energia cinetica di un oggetto è uguale al lavoro totale
compiuto su un oggetto.
Velocità dell'oggetto:
v
Massa dell'oggetto:
M
Lavoro compiuto sull'oggetto:
W net
Energia cinetica dell'oggetto:
K..1
2
M v2
Quantità di moto dell'oggetto:
p M.v
Energia cinetica dell'oggetto:
K
p2
2.M
Variazione dell'energia cinetica dell'oggetto:
ΔK Wnet
Un ciclotrone accelera protoni a velocità molto alte come 2.107
metri al secondo.
Come comparare la loro energia cinetica a quella di una piuma portata lentamente in
volo attraverso l'aria?
Per prima cosa, dobbiamo consultare la lista, nelle Tabelle di Riferimento specifiche,
delle Costanti fisiche fondamentali per trovare la massa di un protone:
M protone 1.6726231.10 27.kg
pagina - 20 ___________________________________________________________________________________
v protone 2.107. m
sec
Usando questi parametri, troviamo l'energia cinetica K protone di ogni protone.
K protone . . 1
2
M protone v protone
2
K protone = 3.3 10
Facciamo ora un calcolo analogo per la piuma che scende lentamente:
M piuma 1.gm
v piuma 10.
cm
sec
K piuma . . 1
2
M piumav piuma
2
K piuma= 5 10 6
Da notare che l'energia cinetica perfino di una leggerissima piuma è ancora molto più
grande di quella del protone, anche se il protone è accelerato ad una velocità
estremamente alta. Questo è perché anche la più piccola piuma è composta di bilioni
di bilioni di bilioni di protoni ed altre particelle elementari.
pagina - 21 ___________________________________________________________________________________
Lavoro, Energia e Potenza
Energia potenziale gravitazionale
L'energia potenziale gravitazionale U è l'energia posseduta da un oggetto a causa
della sua posizione verticale in un campo gravitazionale (come quello della Terra).
Più in alto è portato l'oggetto, più alta è la sua energia potenziale.
Questa energia è chiamata potenziale perché può essere convertita in energia
cinetica semplicemente lasciando cadere l’oggetto.
Altezza sopra il livello di riferimento:
h
Massa di un oggetto:
M
Accelerazione dovuta alla gravità:
g
Energia potenziale gravitazionale:
U M.g.h
Una persona solleva un bilanciere di massa M dal suolo ad una posizione al di sopra
della sua testa ad altezza h.
M 100.kg
h 8.m
L'incremento nell'energia potenziale gravitazionale U del bilanciere è:
U M.g.h
U = 7845 joule
pagina - 22 ___________________________________________________________________________________
Lavoro, Energia e Potenza
Energia potenziale di una molla
L'energia potenziale U immagazzinata in una molla (Legge di Hooke) è
proporzionale al quadrato della lunghezza x della quale la molla è deformata rispetto
alla sua posizione di riposo.
Variazione di allungamento (o compressione):
x
Costante di elasticità della molla:
k
Energia potenziale della molla:
U..1
2
k x2
Ci sono un paio di cose da tenere in mente quando si considera il moto armonico
semplice di una molla. Per prima cosa, l'energia potenziale della molla è convertita in
energia cinetica, che è poi riconvertita in energia potenziale, riconvertita ancora in
pagina - 23 ___________________________________________________________________________________
energia cinetica, e così via. Seconda cosa, un oggetto in moto armonico semplice
raggiunge un punto di massima velocità in cui tutta la sua energia è cinetica, ed un
punto di velocità zero in cui tutta la sua energia è potenziale. Illustriamo questi punti
usando il seguente disegno:
1. Quando la molla raggiunge il suo punto
di allungamento (a metà del suo scatto),
tutta la sua energia potenziale è stata
convertita in energia cinetica, ed ha
raggiunto la massima velocità.
2. Quando la molla è tutta allungata a
sinistra, essa ha la massima energia
potenziale.
3. Quindi quando la biglia si muove verso
destra, converte l'energia potenziale in
energia cinetica.
4. Quando la biglia raggiunge il lato
estremo del suo scatto, la molla è
compressa. La forza esercitata a causa
della compressione fornisce la biglia di
energia potenziale. Tutta l'energia cinetica
è stata convertita in energia potenziale, e
la velocità della biglia è zero.
Una cassetta di massa M è lasciata cadere da una altezza h su una
molla la cui costante di elasticità è k. Qual è la massima distanza
y per la quale la molla è compressa?
M 50.kg
h 3.m
k 800.
joule
m2
Abbiamo affrontato questo problema usando i principi della
pagina - 24 ___________________________________________________________________________________
conservazione dell'energia.
L'incremento in energia potenziale della molla dopo che è compressa da una distanza
y è:
1. .
2
k y2
La diminuzione in energia potenziale gravitazionale della cassa dopo che cade da
una distanza h sulla molla è:
M.g.h
La diminuzione in energia potenziale gravitazionale della cassa quando essa di
nuovo cade in altezza per una distanza y di cui si comprime la molla è:
M.g.y
Usando il principio della conservazione dell'energia, per equilibrare l'aumento in
energia potenziale della molla con il decremento in energia potenziale gravitazionale
della cassa, ricaviamo:
M.g. h y 1. .
2
k y2
Possiamo risolvere l'equazione relativa alla conservazione dell'energia rispetto allo
spostamento y:
y soluzione
1.
k
. M g . M2 g2 . . . .2 g h M k
1.
k
. M g . M2 g2 . . . .2 g h M k
y soluzione=
1.4
2.626
m
La soluzione fisica pertinente per y è:
y ysoluzione1
y = 1.4 m
pagina - 25 ___________________________________________________________________________________
Lavoro, Energia e Potenza
Potenza
La Potenza P è il rapporto tra il lavoro fatto da una forza e l'intervallo di tempo
impiegato per compierlo. L'unità di misura SI per la potenza è
1.watt = 1
joule
sec .
Lavoro fatto:
ΔW
Intervallo di tempo impiegato a compiere il lavoro W:
Δt
Potenza:
P
ΔW
Δt
I 500 fari allo stadio richiedono 500.000 Watt per funzionare. Quanto lavoro deve
essere fatto per far funzionare queste luci per una partita della durata di quattro ore?
P 5.105.watt
t 4.hr
W P.t
W = 7.2 109 joule
Un bel po' di lavoro. Quanto alto dovete portare un container di 5 tonnellate per fare
la stessa quantità di lavoro?
W m.g.h
M 5.ton
h
W.
Mg
h = 162 km
pagina - 26 ___________________________________________________________________________________
Una automobile di massa M sta salendo una collina che ha una pendenza di 30 gradi
ad una velocità costante v. Qual è la potenza spesa dal motore dell'auto?
M 1.ton
v 55.mph
θ 30.deg
Il motore applica una forza per far muovere l'auto a velocità costante su per il pendio.
La forza applicata F applicata è:
F applicata M.g.sin θ
F applicata= 4.4 103 newton
Per un oggetto che si muove in una certa direzione a causa di una forza, il lavoro
ΔW fatto sull'oggetto dalla forza costante applicata F è uguale al prodotto della
componente della forza nella direzione del moto dell'oggetto F x e lo spostamento
Δx. Siccome la forza applicata e la velocità sono parallele
F x F applicata
e
ΔW F applicata.Δx
possiamo scrivere la potenza P come
.
P
ΔW
Δt
F applicata.
Δx
Δt
F applicata.v
dove v è la velocità media
La potenza P può essere ora calcolata
P F applicata.v
P = 1.1 105 watt
pagina - 27 -
___________________________________________________________________________________
Lavoro, Energia e Potenza
Conservazione dell'energia
L'energia non può essere né creata né distrutta, ma solo trasformata da una forma in
un'altra. Questo principio ha conseguenze di vasta portata in molte aree della fisica.
Un caso speciale di questo principio è la conservazione dell'energia meccanica, come
l'equilibrio dell'energia potenziale gravitazionale U e l'energia cinetica K di un
oggetto che cade, come descritto in questa sezione. Una più estesa spiegazione di
questo equilibrio verrà presentata nella sezione "Esplorazioni" della Fisica .
Si può anche esplorare una più generale implicazione della legge sulla conservazione
dell'energia, l'equivalenza di massa ed energia, incapsulata nella famosa equazione
di Einstein E m.c2
.
Energia cinetica:
K
Energia potenziale:
U
Conservazione della energia meccanica:
ΔK ΔU 0
K U costante
Una automobile, inizialmente ferma, di massa M comincia a discendere una collina
inclinata ad un angolo θ rispetto al piano orizzontale. La lunghezza della collina è L.
Qual è la velocità v dell'auto in fondo alla collina?
M 1000.kg
θ 40.deg
L 10.m
Per trovare v, usiamo il principio della
conservazione dell'energia meccanica.
La variazione in energia potenziale
gravitazionale ΔU dell'auto dipende
pagina - 28 ___________________________________________________________________________________
dall'abbassamento della quota verticale h corrispondente alla distanza L lungo la
collina:
h L.sin θ
h = 6.43 m
ΔU U finale U iniziale 0 M.g.h
ΔU M.g.h
ΔU = 6.3 104 joule
Il segno negativo di ΔU indica che l'energia potenziale gravitazionale dell'auto è
diminuita.
Dall'equazione della conservazione dell'energia meccanica, l'aumento in energia
cinetica ΔK dell'auto deve essere uguale alla diminuzione nell'energia potenziale
gravitazionale ΔU:
ΔK ΔU
ΔK = 6.3 104 joule
Siccome l'energia cinetica è definita come
ΔKE 1. .
2
M v2
Possiamo risolvere l’equazione precedente rispetto a v e trovare la velocità v:
v
2.ΔK
M
v = 25.1 mph
pagina - 29___________________________________________________________________________________
Solidi e Liquidi
Densità
La densità ρ di un oggetto è direttamente proporzionale alla sua massa M ed inversamente
proporzionale al suo volume V. Maggiore è la massa dentro una data quantità di spazio, più
elevata la densità.
Massa:
M
Volume:
V
Densità:
ρM
V
La densità dell'acqua è 1 grammo per centimetro cubo. Quanto pesa una tanica d'acqua di
venti galloni?
Un centimetro cubo
ρ 1.
gm
cm3
pagina - 30 ___________________________________________________________________________________
V 20.gal
1 gal = 3.785 10 3 m3
20 gal = 0.076 m3
Usando la densità risulta:
M V.ρ
M = 75.7 kg
pagina - 31 ___________________________________________________________________________________
Solidi e Liquidi
Pressione idrostatica
La pressione su un oggetto immerso in un liquido è direttamente proporzionale alla profondità
di immersione h e alla densità del liquido ρ. La costante di proporzionalità è g, la accelerazione
di gravità.
Profondità del fluido:
h
Densità del fluido:
ρ
Accelerazione di gravità:
g = 9.807
m
sec2
Pressione idrostatica:
p ρ.h.g
In un lago, a che profondità dovete immergervi affinché la pressione che l'acqua esercita su di
voi sia uguale a quella atmosferica?
Sulla superficie, un tuffatore è soggetto ad una atmosfera di pressione:
p 1.atm
che, in unità SI, equivale a:
p = 1.013 105 Pa
Per calcolare la profondità che il tuffatore dovrebbe raggiungere perché la pressione esercitata
su di lui dall'acqua uguagli p = 1 atm è necessario conoscere la densità dell'acqua:
ρ 1000.
kg
m3
Rivedendo l'equazione per la pressione idrostatica, possiamo ora calcolare la profondità h:
pagina - 32 ___________________________________________________________________________________
h
p.
ρg
h = 10.332 m h = 1.033 104 mm
Quanto deve essere alta una colonna di mercurio per esercitare una pressione equivalente
all'atmosfera? Comparate la risposta a quella vista nell'esempio 1.
La pressione e la densità, in questo caso, sono
p 1.atm
ρ 13600.
kg
m3
Usando l'equazione per la pressione idrostatica avremo:
h
p
ρ.g
h = 759.7 mm
Notate che, siccome il mercurio è più denso dell'acqua, serve una minore quantità di esso per
raggiungere la stessa pressione idrostatica (es. 1.atm, come in questi esempi).
pagina - 33 ___________________________________________________________________________________
Solidi e Liquidi
Spinta idrostatica e galleggiamento
Un solido immerso in un fluido subisce una forza diretta verso l'alto, chiamata forza
di spinta, che è proporzionale alla densità del fluido ρ f ed al volume dell’acqua
spostata V s dal solido galleggiante.
Densità del fluido: ρ f
Densità del solido: ρ s
Volume del solido: V s
Principio di Archimede
Peso del solido:
P s ρ s.V s.g
Forza di spinta:
F S ρ f.V s.g
Una sfera di acciaio di raggio R è sommersa in acqua. Qual è la grandezza della forza
di spinta che agisce sulla sfera? Qual è il peso apparente della sfera?
ρ acciaio 9.
gm
cm3
ρ acqua 1.
gm
cm3
r 10.cm
Prima cosa è trovare il volume V della sfera:
pagina - 34 ___________________________________________________________________________________
V..4
3
π r3
La forza di spinta che agisce sulla sfera è quindi
F S ρ acqua.V.g
Il peso apparente W della sfera è il “vero” peso della sfera meno la forza di spinta
esercitata sulla sfera stessa dal fluido:
W apparente ρ acciaio.V.g F S
W apparente = 328.6 newton
F S = 41.1 newton
V = 4189 cm3
pag. - 1 ___________________________________________________________________________________
Energia termica
Propagazione del calore per Conduzione
La conduzione è la propagazione di energia (calore) termica, attraverso una sostanza,
da una regione più calda ad una più fredda. Il calore si propaga attraverso una
sostanza come risultato delle collisioni tra le molecole. Quando c'è una differenza di
temperatura ΔT tra sostanze a contatto, le molecole di energia più elevata della
sostanza più calda trasferiranno energia alla sostanza più fredda attraverso la
collisione molecolare, creando un flusso di calore Φ .
Conducibilità termica:
k
Temperatura calda:
T calda
Temperatura fredda:
T fredda
Area perpendicolare alla propagazione di calore:
A
Distanza tra la faccia calda e la faccia fredda:
L
Propagazione di calore:
Φ quantità_di_calore_trasmesso
tempo_trascorso
ΔQ
Δt
Differenza di temperatura:
ΔT T calda T fredda
Propagazione di calore per conduzione:
Φ k.A.
ΔT
L
Un piatto di metallo di spessore d e di area rappresentativa A, è esposto ad una
fiamma su un lato e ad acqua corrente sull'altro lato. La temperatura del lato vicino al
pag. - 2 ___________________________________________________________________________________
fuoco è costante a T calda; il lato vicino all'acqua corrente è costante a T fredda.
d 5.mm
A 8000.cm2
T calda 573.K
T fredda 293.K
Se il calore si propaga, il flusso Φ attraverso il piatto è misurato come
Φ 600.
kcal
sec
La conducibilità termica k del metallo è
k Φ. d
A. T calda T fredda
(Un metallo con questo valore approssimativo di k è l'acciaio.)
k = 56.073
pag. - 3 ___________________________________________________________________________________
Energia termica
Prima legge della Termodinamica
Se una quantità di calore Q è assorbita da un sistema ed il sistema fa un lavoro L
sull’ambiente esterno, allora la variazione in energia interna ΔU del sistema è uguale
alla differenza Q L. Questa legge, conosciuta come prima legge della
termodinamica, è un’altra formulazione della legge della conservazione dell'energia.
Trasferimento di calore al sistema:
Q
Lavoro fatto dal sistema:
L
Variazione di energia interna del sistema:
ΔU Q W
Quando l'acqua bolle e si converte in vapore, sta assorbendo energia Q dalla stessa
fonte (molto probabilmente la vostra cucina), ed il calore compie un lavoro W
sull'acqua per convertirla in vapore. Possiamo calcolare questi valori e trovare la
variazione di energia interna ΔU dell'acqua.
Se supponiamo di essere sulla Terra e al livello del mare, la pressione è
p 1.atm
Per definizione, il calore Q, richiesto per convertire una quantità di acqua in vapore, è
uguale alla massa dell'acqua moltiplicata per quello che è chiamato il calore di
vaporizzazione L v dell'acqua:
M 5.gm
L v 539.
cal
gm
Q M.L v
Q = 11283 joule
pag. - 4 ___________________________________________________________________________________
Perché la pressione rimanga costante, il lavoro fatto dal sistema deve essere uguale a
P(V2 - V1), ovvero la pressione per la differenza tra il volume dell'acqua ed il volume
del vapore:
ρ w 1.
gm
cm3
ρ s 5.984.10 4. gm
cm3
Vw
M
ρw
Vs
M
ρs
= V w 5 cm 3
Il lavoro fatto dal sistema è:
W p. V s V w
e la variazione in energia interna del sistema è quindi:
ΔU Q W
Δ U = 10437.3 joule
W = 202.1 cal
V s = 8356 cm3
pag. - 5 ___________________________________________________________________________________
Energia Termica
Seconda legge della Termodinamica
In molte trasformazioni fisiche si è notato che una stessa sorgente scambia con un
corpo, che subisce il processo, una quantità di calore maggiore o minore a seconda
che la trasformazione avvenga con o senza dispersione di energia in attriti, cioè in
modo irreversibile o reversibile: il risultato è prevedibile, dal momento che nel caso
in cui avvengano dispersioni energetiche la sorgente deve scambiare una maggiore
quantità di calore per produrre lo stesso lavoro.
Esiste una nuova grandezza che viene assunta come indice della perdita di capacità
di un sistema di compiere lavoro quindi di produrre energia, come indice della
probabilità di uno stato termodinamico. Essa è stata chiamata entropia (da un
vocabolo greco che significa trasformazione) da Clausius.
La seconda legge della termodinamica afferma che tutti i processi naturali vanno in
una certa direzione ossia nella direzione secondo cui si incrementa l'entropia totale
dell'universo. Un altro modo di definire la seconda legge della termodinamica è
quello di dire che il calore passa spontaneamente da un corpo più caldo ad uno più
freddo, ma non viceversa.
Calore entrato nel sistema:
Q
Temperatura assoluta:
T
Variazione dell'entropia:
ΔS
Q
T
Cinquanta grammi di ghiaccio stanno fondendo in un liquido a 0°C (o 273 K).
M 50.gm
T 273.K
L f 80.
cal
gm
La quantità di energia può essere calcolata così:
Q M.L f
pag. - 6 ___________________________________________________________________________________
Con i dati sull'energia e sulla temperatura, l'entropia viene calcolata come:
ΔS
Q
T
L'entropia aumenta, così c'è molto disordine nel sistema. Una delle cose più
interessanti sull'entropia è che
ΔS universo>0
Cioè, l'entropia nell'universo va sempre più aumentando, ossia il numero di
condizioni possibili sta aumentando, e il livello di ordine sta diminuendo.
Δ S = 61.345
joule
K
Q = 4000 cal
pag. - 7 ___________________________________________________________________________________
Solidi e Liquidi
Tensione superficiale
Mentre le molecole all'interno di un liquido vengono attratte in tutte le direzioni, le
molecole sulla superficie hanno una azione di richiamo verso l'interno, che provoca
la tensione superficiale.
Consultate Le Tabelle di Riferimento specifiche per trovare la tensione
superficiale di molti liquidi comuni.
La tensione superficiale di un oggetto sferico (come una goccia d'acqua) può essere
determinata dal suo diametro e dalla sua pressione relativa interna.
Pressione relativa dentro una goccia sferica di liquido:
p relativa
Diametro della goccia d'acqua:
d
Tensione superficiale di una goccia sferica di liquido:
σ 1. .
4
p relativad
pag. - 8 ___________________________________________________________________________________
Qual è la tensione superficiale di una goccia d'acqua del diametro di 1.mm, se la
pressione relativa è uguale a 200.Pa ?
d 1.mm
p relativa 200.Pa
Usando la formula per la tensione superficiale di una goccia sferica, avremo:
σ 1. .
4
p relativad
Nota che più piccola è la gocciolina, più grande sarà la pressione.
σ = 0.05
newton
m
pag. - 9 ___________________________________________________________________________________
Solidi e Liquidi
Calore di vaporizzazione
Il calore di vaporizzazione L v è la quantità di calore necessaria per trasformare
una massa unitaria dallo stato liquido allo stato gassoso.
Il passaggio vaporizzazione/condensazione si visualizza più facilmente usando il
"diagramma cambiamento di fase".
Massa di liquido evaporato:
M
Quantità di calore usato per la vaporizzazione:
Q
Calore di vaporizzazione:
Lv
Q
M
Quanta acqua sarete in grado di convertire in vapore acqueo usando un bollitore di
1.kW per cinque minuti? (Assumiamo che tutta la potenza del bollitore sia usata per
generare calore.) Quanto alcool si dovrebbe vaporizzare in identiche condizioni?
P 1kW
Δt 5.min
Per prima cosa calcoliamo quanto calore è generato dal bollitore nel tempo Δt :
Q P.Δt
Poi guardiamo il calore di vaporizzazione per l'acqua e per l'alcool:
acqua:
L acqua_v 2.26.106. joule
kg
Q = 3 105 joule
pag. - 1 0 ___________________________________________________________________________________
alcool:
L alc_v 8.79.105. joule
kg
Possiamo ora usare la definizione di calore di vaporizzazione per trovare la quantità
(massa) d'acqua ed alcool vaporizzati dal bollitore:
M acqua
Q
L acqua_v
M alc
Q
L alc_v
Da notare che, siccome il calore di vaporizzazione dell'acqua è più alto di quello
dell'alcool, dalla stessa quantità di calore viene vaporizzata una maggiore quantità
d'alcool che di acqua.
M alc = 341.3 gm
M acqua = 132.7 gm
pag. - 1 1 ___________________________________________________________________________________
Solidi e Liquidi
Calore di fusione
Il calore di fusione è la quantità di calore necessaria per portare una massa unitaria
di sostanza da solida a liquida. La temperatura alla quale questa trasformazione
avviene è chiamata punto di fusione. Potete trovare una tabella dei punti di fusione
di molti metalli nelle Tabelle di Riferimento specifiche.
Il passaggio fusione/solidificazione è meglio visualizzato usando il "diagramma
cambiamento di fase".
Massa del solido fuso:
M
Quantità di calore usato per la fusione:
Q
Calore di fusione:
Lf
Q
M
Trovare l'energia necessaria per fondere un blocco di rame di 1.kg al suo punto di
fusione.
M 1.kg
Dallo standard di riferimento, troviamo che il calore di fusione per il rame è:
L f 2.05.105. joule
kg
La quantità di calore necessario per fondere il blocco è quindi:
Q L f.M
Q = 2.05 105 joule
pag. - 1 2 ___________________________________________________________________________________
Solidi e Liquidi
Dilatazione termica
Tutti i solidi ed i liquidi cambiano la loro densità (massa per volume unitario)
quando sono riscaldati o raffreddati. Possiamo caratterizzare il cambiamento del
volume di una sostanza in relazione alla sua temperatura con il suo coefficiente di
dilatazione del volume β. Quando vogliamo sapere come una dimensione lineare
di un solido cambia con la temperatura, parliamo di coefficiente di dilatazione
lineareα. Questi coefficienti, per parecchi metalli, sono elencati nelle Tabelle di
Riferimento specifiche.
Lunghezza iniziale del solido:
L
Volume iniziale del solido:
V
Variazione di temperatura:
ΔT
Coefficiente di dilatazione lineare:
α
Coefficiente della dilatazione di volume:
β
Variazione in lunghezza:
ΔL α.L.ΔT
Variazione di volume:
ΔV β.V.ΔT
Relazione tra volume e coefficiente di dilatazione lineare:
β 3.α
pag. - 1 3 ___________________________________________________________________________________
Un nastro d'acciaio misura la lunghezza L 1 di un tubo di alluminio alla temperatura T 1:
L 1 50.cm
T 1 273.K
Alla temperatura T 1 le misure del nastro rappresentano la reale lunghezza del tubo.
Quale lunghezza L 2 misura il nastro alla temperatura T 2 323.K ?
Per prima cosa bisogna cercare i coefficienti di dilatazione lineare per l'acciaio e
l'alluminio.
Alluminio:
Acciaio:
α st 12.0.10 6. 1
K
Variazione di temperatura:
ΔT T 2 T 1
La lunghezza reale del tubo a temperatura T 2 è
L al L 1. 1 α al.ΔT
La lunghezza reale di 1.cm del nastro di acciaio alla temperatura T 2 è
L st 1.cm. 1 α st.ΔT
Così il numero di centimetri N rilevato sul nastro sarà
N
L al
L st
N = 50.029
L st = 1.0006 cm
L al = 50.0595 cm
Δ T = 50 K
α al 23.8. 10 6. 1
K
pag. - 1 4 ___________________________________________________________________________________
Solidi e Liquidi
Struttura cristallina
Comparati ai gas, i solidi ed i liquidi sono molto più densi perché le particelle, nei
solidi e nei liquidi, sono ‘a contatto’ l'una con l'altra.
Mentre i solidi mantengono la loro forma propria, i liquidi ed i gas prendono la
forma del loro contenitore. I solidi possono essere approssimativamente divisi in
due tipi: cristallini (con particelle che hanno un modello regolare; per esempio, il
rame ed il sale da tavola) e amorfi (ad esempio il vetro e la gomma). Questa sezione
tratta la struttura microscopica dei solidi cristallini.
La disposizione delle particelle in un cristallo è chiamata a reticolo. Allo stesso
modo, i blocchi fondamentali di costruzione che ripetono se stessi senza un reticolo
sono chiamati celle elementari o unitarie. Tre tipi di reticoli saranno descritti qui:
cubico semplice, cubico a facce centrate, e cubico a corpo centrato. Molte
sostanze cristalline comuni hanno uno di questi reticoli.
Dimensione cella elementare:
a
Distanza tra i gli ioni immediatamente a contatto in cristalli con differenti tipi di
reticolo (leggete le note esplicative riguardanti i sottostanti diagrammi):
Cristallo cubico semplice (CS):
da
pag. - 1 5 ___________________________________________________________________________________
Cristallo cubico a facce centrate (CFC):
d
a
2
Cristallo cubico a corpo centrato(CCC):
d
3.a
2
L'oro metallico forma un cristallo cubico a facce centrate, nel quale la dimensione
della cella unitaria è 4.07 Angstrom.
Qual è la distanza tra i gli atomi che si trovano a immediato contatto in un cristallo
d'oro, e quanti di questi hanno qualche atomo d'oro?
Notate che le distanze atomiche sono spesso misurate in Angstrom, allora, per prima
cosa, definiamo questa unità di lunghezza:
Angstrom 10 10.m
a oro 4.07.Angstrom
Per trovare la distanza tra i gli atomi a immediato contatto in un cristallo d'oro,
usiamo la formula per i reticoli CFC:
d oro
a oro
2
d oro = 2.878 Angs
Quando un cristallo d'oro è cubico a facce centrate, ciascun atomo d'oro nel cristallo
ne ha 12 a immediato contatto.