Anno accademico 1981-1982
Dissertazione: Descrivere concisamente (si consiglia un limite di tre facciate) le
caratteristiche dei tre stati di aggregazione della materia e le trasformazioni tra
di essi.
Risolvere cinque dei seguenti problemi.
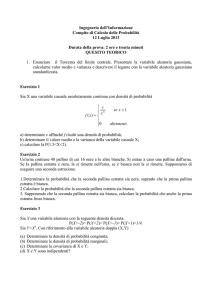
1) Una pallina, che si suppone di dimensioni trascurabili, si sposta
orizzontalmente, sul pianerottolo di una scala a tre gradini, come indicato nella
figura, con velocità 𝑣 = 1 𝑚/𝑠 . Se nel rimbalzo la componente verticale della
velocità si riduce di un fattore 𝑓 e la componente orizzontale rimane inalterata,
tenendo conto dei dati geometrici della figura, determinare il valore di 𝑓 per cui
la pallina tocca il suolo alla minima distanza dall’ultimo gradino.
Come suggerisce la figura riportata nel testo, ciò che interessa studiare è il moto
della pallina nell’intervallo di tempo che comprende i primi due rimbalzi al suolo,
che verranno schematicamente studiati in quel che segue. Si sottolinea che, per
brevità di notazione, si introdurranno le dimensioni del gradino, che ha una base
𝑏 = 0.3 𝑚 ed un’altezza ℎ = 0.2 𝑚, e si considererà, quale riferimento per lo
studio del moto, il sistema riportato in figura, avente l’origine coincidente con lo
spigolo del primo gradino.
2
Durante il primo tratto del moto, quando ha lasciato lo spigolo 𝐴, ma non è ancora
arrivata al rimbalzo sul primo gradino, la pallina si muove descrivendo un arco di
parabola, dato che subisce l’azione della sola forza di gravità; pertanto,
componendo il moto lungo l’asse delle ascisse risulta rettilineo ed uniforme,
mentre quello lungo l’asse delle ordinate è decelerato. Poiché è nota l’altezza del
gradino, è possibile ricavare facilmente la velocità nel punto di impatto sul
secondo gradino. Rispettando i versi degli assi riportati in figura e con ovvio
significato dei simboli adoperati, si può scrivere che le componenti della velocità
della pallina valgono
𝑣𝑥 (𝑡) = 𝑣 , 𝑣𝑦 (𝑡) = −𝑔𝑡 ,
per cui le coordinate obbediscono alle equazioni orarie
1
𝑥(𝑡) = 𝑣𝑡 , 𝑦(𝑡) = − 𝑔𝑡 2 .
2
Discende che la pallina impatterà il primo gradino nell’istante 𝑡0 , per cui
1
2ℎ
𝑦(𝑡0 ) = −ℎ = − 𝑔𝑡02 → 𝑡0 = √ ≅ 0.2 𝑠 → 𝑥(𝑡0 ) = 𝑣𝑡0 ≅ 0.2 𝑚 .
2
𝑔
Nel medesimo istante, le due componenti della velocità sono pari a
𝑣𝑥 (𝑡0 ) = 𝑣 , 𝑣𝑦 (𝑡0− ) = −𝑔𝑡0 = −√2𝑔ℎ ≅ 2
𝑚
.
𝑠
Il segno meno ricorda che si tratta di un limite sinistro, cioè del valore assunto
dalla componente verticale immediatamente prima del rimbalzo. Dopo l’urto con
3
il primo gradino la velocità, questa componente della velocità cambia verso e si
riduce di un certo fattore 𝑓, sicché il suo valore immediatamente dopo il rimbalzo
risulta pari a
𝑣𝑦 (𝑡0+ ) = 𝑓𝑔𝑡0 = 𝑓√2𝑔ℎ ≅ 2𝑓 .
Durante il secondo tratto del moto, la pallina, per effetto del rimbalzo, si muove
lungo un nuovo arco di parabola, prima verso l’alto, poi verso il basso. La pallina
cadrà alla minima distanza dal terzo gradino, quando, nel suo moto parabolico,
sfiorerà appena l’estremità 𝐶 del secondo gradino: se fosse poco meno,
rimbalzerebbe di nuovo, andando più lontano; se fosse di più, non si avrebbe una
condizione di minima distanza. Inoltre, essa cade tanto più vicino al gradino,
quanto minore è il numero di salti effettuati. Infatti, essendo 𝑓 < 1, il vertice della
parabola si abbassa ad ogni salto e, dato che la componente orizzontale della
velocità rimane costante, la parabola passa per il punto 𝐶 con una pendenza tanto
maggiore, quanto minore è il numero di salti.
L’equazione oraria della traiettoria lungo l’asse delle ascisse
𝑥(𝑡) = 𝑣𝑡0 − 𝑣(𝑡 − 𝑡0 ) = 𝑣𝑡
rimane la stessa del caso precedente, mentre lungo l’asse delle ordinate il moto è
descritto dall’equazione
1
𝑦(𝑡) = −ℎ + 𝑓𝑔𝑡0 (𝑡 − 𝑡0 ) − 𝑔(𝑡 − 𝑡0 )2 .
2
In corrispondenza dell’istante di tempo
𝑡𝐶 =
2𝑏
= 0.6 𝑠 ,
𝑣
4
la pallina sfiorerà lo spigolo 𝐶(2𝑏 , −2ℎ), se
1
𝑦(𝑡𝐶 ) = −ℎ + 𝑓𝑔𝑡0 (𝑡𝐶 − 𝑡0 ) − 𝑔(𝑡𝐶 − 𝑡0 )2 = −2ℎ .
2
Da questa relazione si ottiene facilmente che
1
1
1
𝑓𝑔𝑡0 (𝑡𝐶 − 𝑡0 ) = −ℎ + 𝑔(𝑡𝐶 − 𝑡0 )2 = − 𝑔𝑡02 + 𝑔(𝑡𝐶 − 𝑡0 )2 ,
2
2
2
da cui, in definitiva, discende il valore di 𝑓 desiderato
2𝑓 = −
𝑡0
𝑡𝐶 − 𝑡0 3
3
+
≅
→ 𝑓≅ .
𝑡𝐶 − 𝑡0
𝑡0
2
4
Ogni corpo che cade acquista velocità e, quando raggiunge il suolo, a seconda del
materiale di cui è composto, può spiaccicarsi sul pavimento, come una torta, un
uovo, oppure rimbalzare. Se l’oggetto è rigido come un sasso e cade su una
superficie altrettanto rigida, non si deforma quasi per niente e, quasi quasi, non
rimbalza, al massimo si rompe. Se invece l’oggetto è molto elastico, come una
pallina di gomma, al contatto col suolo si deforma un po’, assorbendo buona parte
dell’energia che aveva in seguito al lancio. Subito dopo l’impatto, però, la gomma
tende a riacquistare l’originaria forma sferica, liberando così l’energia accumulata
che la fa rimbalzare di nuovo e così via. In ciascuno di questi rimbalzi la pallina
trasforma in calore solo una piccola parte dell’energia cinetica che la fa
rimbalzare.
Poiché le cosiddette palline magiche trasformano in calore una quantità di energia
minore rispetto ad altri oggetti, rimbalzano più a lungo prima che la loro energia
si esaurisca. Per questa ragione, se si raccoglie la pallina dopo averla lanciata e
5
fatta rimbalzare un po’ di volte, essa sarà tiepida: una parte dell’energia conferita
al momento del lancio si è trasformata in calore.
6
2) Un elicottero del peso di 20 𝑞𝑢𝑖𝑛𝑡𝑎𝑙𝑖 sta sospeso nell’aria per la rotazione delle
pale di lunghezza 2 𝑚. Senza tener conto della forma specifica delle pale rotanti,
si dia una valutazione approssimata della velocità dell’aria spinta in basso e della
potenza fornita dal motore dell’elicottero. (Si ricordi che la densità dell’aria è
1.3 𝑘𝑔/𝑚3 ).
Un elicottero è una aerodina, cioè è un velivolo più pesante dell’aria che vola
aspirando aria dall’alto e pompandola in basso: quando questa spinta è uguale al
proprio peso, l’elicottero è fermo in aria; quando invece essa è maggiore del
proprio peso, serve a trascinarsi verso l’alto. La sostentazione negli elicotteri è
dovuta ad un rotore principale, che è provvisto di un minimo di due pale che sono
collegate tramite un mozzo ad un albero.
Per la conservazione del momento angolare, questa configurazione crea un coppia
che porterebbe a un rotazione nel senso contrario della fusoliera per reazione. Per
contrastare questa coppia, vengono nella maggior parte dei casi adottati, in
aggiunta al rotore principale, rotori di dimensioni minori posti in coda lungo
direzioni perpendicolari.
7
Un elicottero in volo è dunque inserito in una colonna di aria che lo contiene; la
pressione dell’aria molto al di sopra dell’elicottero è quella normale, cioè
atmosferica e, quando il rotore gira, le pale dunque aspirano aria dall’alto, cioè
parte superiore della colonna, e la pompano verso il basso. La spinta fornita dalle
pale all’aria sottostante deve mantenere in equilibrio l’elicottero, dovendo essere
uguale e contraria al suo peso.
Ispirandosi sicuramente alle forme della Natura, già nel 1400 il genio di Leonardo
da Vinci abbozza sui suoi appunti una rudimentale macchina alimentata dalla
forza umana che è stata definita il primo elicottero. L’immagine riportata mostra
la cosiddetta vite aerea concepita da Leonardo, che, sfortunatamente per lui, non
avrebbe mai potuto volare, perché ai suoi tempi sarebbe risultato impossibile
produrre una forza sufficiente a sollevare una macchina di questo tipo. Soltanto
quattro secoli più tardi, nel 1877, l’italiano Enrico Forlanini progetta e costruisce
un apparato sperimentale alimentato da un motore a vapore, che forniva energia
per movimentare due rotori contro-rotanti.
Il modello più semplice di elicottero è dunque rappresentato da un disco di data
superficie, che produce un flusso uniforme d’aria ad una certa velocità in
prossimità del rotore.
8
Per spiegare come si generi la spinta verso l’alto che sostiene in volo un elicottero,
anche detta portanza, si farà uso della terza Legge della Newton, il cosiddetto
principio di azione e reazione, secondo cui le forze si presentano sempre a coppie,
vale a dire che, se un corpo 𝐴 esercita una forza 𝐹⃗𝐴→𝐵 su un altro corpo 𝐵, allora
istantaneamente il corpo 𝐵 eserciterà una forza uguale e contraria 𝐹⃗𝐵→𝐴 sul corpo
𝐴. Ad esempio, in acqua attraverso il movimento degli arti, l’acqua viene spinta
dietro di noi; essa quindi risponde con una forza in avanti che consente
l’avanzamento. È facile rendersi conto che, se la spinta dell’acqua, invece di
avvenire dietro di noi, avvenisse in una direzione sbagliata, lateralmente o verso
il basso, essa non genererebbe una spinta in avanti, bensì una spinta in una
direzione sbagliata, e si manifesterebbe pertanto a livello fisico come energia
persa.
Si mostrerà ora come sia possibile applicare questo principio al moto delle pale di
un rotore nell’aria. Una pala rotante spinge l’aria che la circonda verso il basso;
per questo, la pala deve essere costruita e disposta in modo da spingere verso il
basso una corrente d’aria durante il volo. La corrente d’aria, a sua volta, esercita
sulla pala una forza di reazione diretta verso l’alto che dà origine alla portanza.
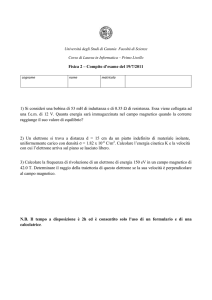
Volendo adoperare un modello molto semplice, si schematizzi la pala di un rotore
di elicottero come un rettangolo di area 𝑆: questo rettangolo ha un lato lungo ed
9
uno più corto e, nella figura che segue, la pala è stata rappresentata di profilo, con
una vista parallela al suo lato corto. L’angolo di inclinazione della pala
sull’orizzontale, detto angolo d’attacco in Aeronautica, viene indicato con 𝛼,
mentre 𝑣⃗ rappresenta la velocità di rotazione.
Ebbene, istante dopo istante, la pala spazza un certo volume d’aria durante la sua
rotazione e, studiando il fenomeno per un intervallo di tempo ∆𝑡, si può ben dire
che la pala intercetta il volume di aria contenuto nel parallelepipedo obliquo di
base 𝑆 ed altezza 𝑣∆𝑡 cos 𝛽, essendo 𝛽 l’angolo complementare di 𝛼, cioè
𝛽=
𝜋
−𝛼,
2
come illustra schematicamente la figura che segue.
Trascurando l’agitazione termica, ogni molecola di aria contenuta in questo
volume urta contro la pala: nell’intervallo di osservazione scelto, le molecole che
non appartengono a questo volume sono fuori bersaglio oppure non intercettano
per tempo la superficie della pala. Dunque, ci si limiterà alla osservazione delle
10
sole molecole contenute in questo volume e, per semplicità, si considera l’urto di
una molecola nel riferimento in cui l’ala è ferma. Supponendo che gli urti siano
elastici ed adoperando la Seconda Legge di Newton nella forma del teorema di
variazione dell’impulso
𝐹⃗𝑚 =
∆(𝑚𝑣⃗)
∆𝑣⃗
=𝑚
,
∆𝑡
∆𝑡
si ricava che la forza esercitata dall’ala sulla molecola di massa 𝑚 dipende solo da
e vale in modulo
𝐹𝑚 =
2𝑚𝑣 cos 𝛽
.
∆𝑡
Essendo le molecole contenute nel volume ∆𝑉 = 𝑆𝑣 cos 𝛽 ∆𝑡 pari a
𝑁∆𝑉 = 𝜌
∆𝑉
𝑆𝑣 cos 𝛽 ∆𝑡
=𝜌
,
𝑚
𝑚
in cui 𝜌 = 1.3 𝑘𝑔/𝑚3 è la densità dell’aria, segue che la forza totale esercitata sulla
pala da tutte queste molecole risulta essere in modulo
𝐹 = 𝑁∆𝑉 𝐹𝑚 = 𝜌
𝑆𝑣 cos 𝛽 ∆𝑡 2𝑚𝑣 cos 𝛽
= 2𝜌𝑆𝑣 2 cos 2 𝛽 .
𝑚
∆𝑡
Di questa forza va considerata la componente verticale, al fine di determinare la
portanza 𝑇, per cui risulta
𝑇 = 𝐹 cos 𝛼 = 2𝜌𝑆𝑣 2 sin2 𝛼 cos 𝛼 ,
quale stima della portanza basata sulla Terza Legge di Newton. Questa formula
prevede una dipendenza quadratica della portanza dalla velocità della pala del
11
rotore e spiega perché gli elicotteri decollano con pendenze particolarmente
accentuate. Considerando il grafico della funzione
𝑓(𝛼) = sin2 𝛼 cos 𝛼 con 0 ≤ 𝛼 ≤
𝜋
,
2
si trova che il massimo relativo della funzione è assunto per
𝛼𝑚𝑎𝑥 = tan−1 √2 ≅ 0.955 ≅ 54.7° → 𝑓(𝛼𝑚𝑎𝑥 ) =
2
3 √3
≅ 0.385 .
Per completare l’analisi si può determinare anche la componente orizzontale
della forza 𝐹⃗ calcolata per mezzo della formula precedente: si vede facilmente che
tale componente dipende dalla terza potenza del seno dell’angolo d’attacco. Essa
rappresenta una resistenza all’avanzamento dell’aereo, molto intensa e del tutto
insostenibile per la potenza che richiederebbe per equilibrarla, a meno che
l’angolo d’attacco 𝛼 non sia sufficientemente piccolo; ma, in tal caso, è piccola
anche la portanza. Questo significa che il modello di pala preso in esame è troppo
semplificato rispetto alla realtà. Comunque, in quel che segue, si ignorerà la
12
dipendenza dall’angolo d’attacco, per semplicità, e si approssimerà la portanza
per mezzo della semplice relazione
𝑇 ≅ 𝜌𝑆𝑣 2 .
Assumendo poi quale superficie quella spazzata dalle pale rotanti di lunghezza 𝑎
𝑆 = 𝜋𝑎2 ,
detto 𝑀𝑔 il peso dell’elicottero, l’equilibrio impone che
𝑀𝑔 = 𝑇 = 𝜋𝑎2 𝜌𝑣 2 .
Da questa relazione, si deduce che la velocità indotta dipende solo dal peso
dell’elicottero, dalla densità dell’aria e dall’area del disco rotore e, se si adoperano
i valori numerici assegnati, è possibile determinare la velocità
𝑀𝑔
9.8 ∙ 20 ∙ 100 𝑚
𝑚
𝑣=√ 2 =√
≅ 34.6 .
𝜋𝑎 𝜌
4 ∙ 𝜋 ∙ 1.3 𝑠
𝑠
13
La potenza meccanica 𝑃 richiesta è quella necessaria ad imprimere la velocità 𝑣
all’aria spostata dalle pale nell’unità di tempo ed è pari all’energia cinetica della
massa d’aria spostata nell’unità di tempo, sicché
1
𝑃 = 𝜋𝑎2 𝜌𝑣 3 ≅ 3.4 ∙ 105 𝑤𝑎𝑡𝑡 .
2
14
3) Un pallone di tela floscio e inestensibile di volume massimo 𝑉0 e di massa, a
vuoto, 𝑀𝑝 viene parzialmente riempito di elio.
(𝑖) Determinare la minima quantità di elio necessaria perché il pallone si sollevi.
(Il rapporto tra il peso specifico dell’aria e quello dell’elio sia 7.2).
(𝑖𝑖) Si esprima, in funzione della densità d’aria 𝜌0 , il valore massimo di 𝑀𝑝 che
consente al pallone di salire.
(𝑖𝑖𝑖) Supponendo che la densità dell’aria vari con legge lineare
𝑧
𝜌(𝑧) = 𝜌0 (1 − )
ℎ
in funzione dell’altezza 𝑧, determinare la massima altezza a cui può arrivare il
pallone.
L’elio è spesso usato all'interno di palloni aerostatici, palloncini e dirigibili,
adoperati per scopi pubblicitari, festivi, ricerca atmosferica e ricognizione
militare.
15
Inoltre, l'elio possiede circa il 93% della capacità di sollevamento dell'idrogeno,
ma non è infiammabile, quindi, è molto sicuro da maneggiare.
Il peso specifico 𝛾 di un corpo materiale è definito come il peso 𝑃 diviso per il suo volume 𝑉
𝛾=
𝑃
𝑉
e nel Sistema Internazionale l'unità di misura è il 𝑛𝑒𝑤𝑡𝑜𝑛/𝑚3.
La densità 𝜌 di un corpo materiale è definita come il rapporto tra la massa M diviso per il suo
volume V
𝜌=
𝑀
𝑉
e nel Sistema Internazionale la sua unità di misura è il 𝑘𝑔/𝑚3 .
È evidente che queste due grandezze sono proporzionali
𝛾 = 𝜌𝑔 ,
essendo 𝑔 = 9.8 𝑚/𝑠 2 l’accelerazione di gravità.
(𝑖) Il principio di Archimede afferma che un corpo, quando è immerso in un fluido,
riceve una spinta (forza) dal basso verso l’alto che è pari al peso del volume del
fluido spostato. Fino a quando non si immette elio gassoso nel pallone, esso resta
al suolo schiacciato dal suo peso. Mano a mano che si immette elio, che è più
leggero dell’aria, il gas comincia a fornire una spinta che, ad un certo momento,
consentirà al pallone di alzarsi in volo; precisamente, quando la spinta
archimedea supererà la forza peso, il pallone si alzerà. La massa di elio vale
𝑀𝐻𝑒 = 𝜌𝐻𝑒 𝑉 ,
16
mentre quella del telo è pari a 𝑀𝑝 . Sulla massa di elio e sul telo agisce la forza di
gravità
𝑃 = 𝑀𝐻𝑒 𝑔 + 𝑀𝑝 𝑔 = 𝜌𝐻𝑒 𝑉 𝑔 + 𝑀𝑝 𝑔 = 𝛾𝐻𝑒 𝑉 + 𝑀𝑝 𝑔 .
Il volume di elio è immerso nell’aria, per cui si è in presenza di una spinta
archimedea 𝐹𝐴 diretta verso l’alto e pari alla forza peso dell’aria spostata
𝐹𝐴 = 𝜌0 𝑔𝑉 = 𝛾0 𝑉 =
𝛾0
𝑀 𝑔.
𝛾𝐻𝑒 𝐻𝑒
Il pallone si alzerà in volo, non appena
𝐹𝐴 ≥ 𝑃 →
𝛾0
𝛾𝐻𝑒
𝑀𝐻𝑒 ≥ 𝑀𝐻𝑒 + 𝑀𝑝 → 𝑀𝐻𝑒 ≥
𝑀 .
𝛾𝐻𝑒
𝛾0 − 𝛾𝐻𝑒 𝑝
Inoltre, conoscendo il rapporto tra il peso specifico dell’aria e dell’elio, si può
affermare che
𝛾0
1
5
= 7.2 → 𝑀𝐻𝑒 ≥
𝑀𝑝 =
𝑀 ,
𝛾𝐻𝑒
7.2 − 1
31 𝑝
da cui discende che la più piccola quantità di elio necessaria, affinché il pallone si
sollevi in volo, è pari a
𝑀𝐻𝑒 (minima) =
5
𝑀 .
31 𝑝
(𝑖𝑖) Sempre utilizzando la precedente disequazione
17
𝑀𝐻𝑒 ≥
𝛾𝐻𝑒
𝑀 ,
𝛾0 − 𝛾𝐻𝑒 𝑝
si può ottenere il valore massimo di 𝑀𝑝 che consente al pallone di salire
𝑀𝑝 ≤
𝛾0 − 𝛾𝐻𝑒
𝜌0
𝑀𝐻𝑒 = (
− 1) 𝑀𝐻𝑒
𝛾𝐻𝑒
𝜌𝐻𝑒
→ 𝑀𝑝 (massimo) = (
𝜌0
− 1) 𝑀𝐻𝑒 .
𝜌𝐻𝑒
(𝑖𝑖𝑖) Ad una generica altitudine 𝑧, il bilancio delle forze agenti sul pallone consente
di scrivere
𝑀𝑝
𝑧
𝜌0
𝑧
𝜌𝐻𝑒 𝑉(𝑧) + 𝑀𝑝 = 𝜌0 (1 − ) 𝑉(𝑧) →
=[
(1 − ) − 1] 𝑉(𝑧) ,
ℎ
𝜌𝐻𝑒
𝜌𝐻𝑒
ℎ
da cui è immediato ricavare
𝑉(𝑧) =
𝑀𝑝
,
𝑧
𝜌0 (1 − ) − 𝜌𝐻𝑒
ℎ
cioè il legame che mostra come, al crescere della quota, aumenti anche il volume.
Allora, detto 𝑉0 il volume massimo, si può dire che la massima quota consentita
risulta pari a
𝑀𝑝
𝑀𝑝
𝑀𝐻𝑒
=
𝑉
→
𝑧
=
ℎ
−
−
(1
).
0
𝑚𝑎𝑥
𝑧
𝜌0 𝑉0 𝜌0 𝑉0
𝜌0 (1 − 𝑚𝑎𝑥 ) − 𝜌𝐻𝑒
ℎ
Da questa relazione si deduce che la massima quota consentita cresce al diminuire
della massa di elio. Pertanto, inserendo il minimo valore che consente al pallone
di salire, già trovato in precedenza, si ottiene la massima altezza
18
𝑧𝑚𝑎𝑥 = ℎ (1 −
𝑀𝑝
5 𝑀𝑝
36 𝑀𝑝
−
) = ℎ (1 −
).
31 𝜌0 𝑉0 𝜌0 𝑉0
31 𝜌0 𝑉0
Da questa formula si evince che il pallone sale tanto più in lato, quanto più piccola
è 𝑀𝑝 : è per questo motivo che, per aumentare la quota, si getta la zavorra. Inoltre,
affinché il risultato ottenuto abbia un senso fisico compiuto, deve accadere che
1−
36 𝑀𝑝
36 𝑀𝑝
> 0 → 𝑉0 >
.
31 𝜌0 𝑉0
31 𝜌0
La densità dell’aria è il rapporto tra massa d’aria e volume occupato. Per convenzione, la densità
dell’aria è definita come quella misurata per l’aria secca alla temperatura di 15 °𝐶 ed al livello
del mare, equivalente alla pressione di 1 𝑎𝑡𝑚. In base a tale convenzione, essa è pari a circa
𝜌0 = 1.225
𝑘𝑔
.
𝑚3
A differenza di altri fluidi, come l'acqua, per i quali, entro certi limiti, è valida l'approssimazione
di considerarli a densità costante, l’aria è invece un fluido facilmente comprimibile, per cui
densità e pressione aumentano all’aumentare del peso della colonna d’aria soprastante. La
densità dell’aria è inoltre inversamente proporzionale alla temperatura poiché, almeno
approssimativamente, l’aria segue la legge dei gas perfetti: quindi a parità di quantità di gas (o
mole) ed a parità di pressione, al diminuire della temperatura diminuisce anche il volume,
mentre la massa si conserva, ovvero aumenta il rapporto 𝑚𝑎𝑠𝑠𝑎/𝑣𝑜𝑙𝑢𝑚𝑒. Viceversa,
aumentando la temperatura, cresce il volume e quindi diminuisce la densità.
19
4) Nel settore 𝐴 del recipiente disegnato in figura è contenuta una certa quantità
di gas mentre il settore 𝐵 è vuoto. Supponendo il recipiente termicamente isolato,
si lasci espandere il gas in modo da occupare tutto il recipiente. Si chiede di
spiegare come varia la temperatura nei due casi di gas perfetto e di gas reale (con
attrazione tra le molecole non trascurabile).
James Prescott Joule condusse un esperimento di espansione libera di un gas a
bassa pressione, come quello schematizzato in figura, stabilendo che l’energia
interna di un gas perfetto dipende solo dalla temperatura. Un contenitore a pareti
rigide e diatermiche è costituito da due parti, non necessariamente uguali,
separate da un rubinetto. La parte sinistra contiene gas, in quella destra è stato
fatto il vuoto. L’apertura della valvola che mette in contatto i due contenitori
genera il passaggio del gas dal contenitore 𝐴 al contenitore 𝐵. Il processo continua
fino a quando il gas non occupa tutto il volume a disposizione, rappresentato dal
volume del contenitore 𝐴 e dal volume del contenitore 𝐵. Nella figura che segue
viene rappresentata la trasformazione del sistema dallo stato iniziale verso lo
stato finale: il contenitore è immerso in un calorimetro ed il termometro consente
di rilevare l’eventuale cambiamento di temperatura del fluido calorimetrico,
segnalando in tal modo uno scambio di calore tra gas e calorimetro. Questo
processo di espansione libera è irreversibile e l’espansione è detta libera, perché
non ci sono forze esterne agenti sul gas. Sperimentalmente si osserva che la
20
temperatura rimane invariata e che il gas quindi non scambia calore con
l’ambiente, cioè con il calorimetro.
Inoltre, non scambia lavoro con l’ambiente, essendo le pareti del contenitore
rigide e, in forza del Primo Principio della Termodinamica, si può affermare che
l’energia interna di un gas ideale non varia. Si conclude quindi che per un gas
ideale si ha una variazione di temperatura rigorosamente nulla
∆𝑇 = 𝑇𝑓 − 𝑇𝑖 = 0 .
L’espansione del gas avviene, dunque, nel vuoto, laddove non esiste alcuna
pressione esterna che agisca sul gas: il gas perfetto non compie alcun lavoro
quando il suo volume aumenta. L’energia cinetica media rimane inalterata e così
la temperatura non varia.
In realtà, nella pratica, si osserva una piccola variazione di temperatura, tanto più
piccola quanto più il gas è vicino alle condizioni di idealità. Nel caso di un gas reale
l’espansione richiede lavoro, a causa delle forze attrattive intermolecolari. Dato
che l’energia totale si conserva, l’energia cinetica delle molecole dopo
l’espansione è minore di prima, sicché la temperatura diminuisce.
Precisamente, quando un gas reale espande, la distanza media tra le sue molecole
aumenta e, data la presenza di forze attrattive intermolecolari, l’espansione causa
21
un aumento di energia potenziale del gas. Se non viene estratto lavoro dal sistema
e non viene trasferito calore, come durante il processo di espansione libera,
l’energia totale del gas rimane la stessa, per la conservazione dell’energia totale,
e l’aumento di energia potenziale produce di conseguenza una riduzione
dell’energia cinetica, producendo un decremento di temperatura del gas.
Il potenziale di John Lennard-Jones è il più noto e il più usato dei potenziali
empirici per descrivere l'interazione interatomica ed intermolecolare. A distanze
interatomiche oppure intermolecolari molto piccole le densità elettroniche si
sovrappongono generando forze repulsive molto intense, caratterizzate da un
raggio d’azione molto corto e dal fatto che crescono rapidamente all’avvicinarsi
delle molecole. Per esse non esiste un'equazione ricavata teoricamente che le
descriva, dunque ci si deve affidare ad alcune funzioni potenziali empiriche.
La più famosa funzione potenziale empirica, detta legge del 12-6, che comprende
anche la parte attrattiva dovuta all’interazione di van der Waals, è il potenziale
proposto nel 1931 da John Lennard-Jones all'Università di Bristol, composto di
due termini
22
𝑈(𝑟) =
𝐴
𝐵
−
.
𝑟 12 𝑟 6
Una parte va con la sesta potenza della distanza tra le molecole è il contributo
attrattivo delle forze di Van der Waals, forze dipolo-dipolo e forze dipolo-dipolo
indotto, e prevale a distanze grandi; un’altra parte che va con la dodicesima
potenza dodici descrive le forze repulsive che si instaurano a corto raggio fra i
nuclei che, a distanze piccole non sono più ben schermati dagli elettroni, e fra gli
elettroni stessi, soggetti a una forza repulsiva che si genera quando due o più di
essi tendono ad occupare gli stessi numeri quantici, in contrasto al principio di
Pauli.
La parte della curva che interessa il problema in esame è quella a destra del
minimo, cioè per 𝑟 > 𝑟𝑚𝑖𝑛 , dove l’energia potenziale aumenta al crescere della
distanza tra le molecole e quindi la forza è attrattiva. Ad ogni densità corrisponde
un ben definito valore medio della distanza intermolecolare e quindi una energia
potenziale media di interazione per molecola, desumibile dal grafico riportato.
L’energia cinetica media per molecola 𝐾, che dipende, per la teoria cinetica dei
gas, soltanto dalla temperatura assoluta
5
𝐾(𝑇) = 𝑘𝑇
2
si può ricavare dalla conservazione dell’energia totale, sicché, con evidente
significato dei simboli adoperati, si può scrivere
𝐾(𝑇1 ) + 𝑈(𝑅1 ) = 𝐾(𝑇2 ) + 𝑈(𝑅2 ) ,
23
L’energia potenziale 𝑈 è negativa e diminuisce in valore assoluto al crescere del
volume, quindi della distanza intermolecolare media. Si conclude, pertanto, che
deve essere
𝑇2 < 𝑇1
e la precedente equazione consente di calcolare la nuova temperatura 𝑇2 , a partire
dalla temperatura 𝑇1 e dai volumi iniziale e finale del gas. Precisamente, si
potrebbe dimostrare che la variazione di temperatura durante un’espansione,
nota come effetto Joule-Kelvin, da un volume 𝑉1 ad un volume 𝑉2 > 𝑉1 è pari a
∆𝑇 =
𝑎𝑛 1
1
( − )<0,
𝑐𝑉 𝑉2 𝑉1
in cui 𝑎 è una delle costanti dell’equazione di van der Waals, 𝑛 è il numero di moli
presenti, 𝑐𝑉 rappresenta il calore specifico del gas a volume costante.
Se invece il gas fosse talmente denso che la distanza media tra le molecole fosse
alla sinistra dell’ascissa del minimo 𝑟𝑚𝑖𝑛 , in moda da avere forze repulsive, la
temperatura aumenterebbe per effetto dell’espansione. Dato che la distanza
minima è dell’ordine del raggio delle molecole
𝑟𝑚𝑖𝑛 ≈ 10−10 𝑚 ,
è facile stimare la densità necessaria 𝜌 affinché questa situazione si verifichi
𝜌 ≈ 1030
𝑚𝑜𝑙𝑒𝑐𝑜𝑙𝑒
.
𝑚3
24
5) Si supponga che lo spettro solare (intensità di irraggiamento per unità di
frequenza in funzione della frequenza) sia rappresentabile in unità opportune da
una semicirconferenza con gli estremi alle lunghezze d’onda di 10−4 𝑐𝑚 e di
10−5 𝑐𝑚. Si consideri un assorbitore selettivo che assorba tutta la radiazione di
lunghezza d’onda inferiore a 4 ∙ 10−5 𝑐𝑚.
Determinare il rendimento di tale convertitore solare, supponendo che tutta
l’energia assorbita possa essere utilizzata.
Si consideri il diagramma mostrato nella figura che segue: esso riporta, al variare
della frequenza, lo spettro solare, cioè l’intensità della radiazione solare per unità
di frequenza, così come descritto dal testo dell’esercizio.
Precisamente, le ascisse rappresentano le frequenze 𝑓 e la semicirconferenza si
estende tra gli estremi
𝑓𝐴 =
𝑐
𝑐
= 3 ∙ 1014 𝐻𝑧 , 𝑓𝐵 =
= 30 ∙ 1014 𝐻𝑧 ,
𝜆𝐴
𝜆𝐵
25
in cui 𝑐 = 3 ∙ 108 𝑚/𝑠 è la velocità della luce nel vuoto. Pertanto, il suo raggio si
ottiene dividendo per due la lunghezza del diametro
𝑟=
𝐴𝐵 𝑓𝐵 − 𝑓𝐴
=
= 13.5 ∙ 1014 𝐻𝑧 ,
2
2
mentre la frequenza centrale è pari a
𝑓𝐶 =
𝑓𝐴 + 𝑓𝐵
= 16.5 ∙ 1014 𝐻𝑧 .
2
Il selettore assorbe tutta la radiazione compresa nella banda di frequenze
𝑓𝐷 ≤ 𝑓 ≤ 𝑓𝐵 ,
in cui l’estremo inferiore è pari a
𝑓𝐷 =
𝑐
= 7.5 ∙ 1014 𝐻𝑧 ,
𝜆𝐷
cioè esso assorbe tutta l’area del semicerchio del precedente grafico, posta a
destra del segmento 𝐷𝐸. Ebbene, nelle unità di misura adottate, l’intensità totale
dell’irraggiamento, cioè l’area del semicerchio, l’area del settore circolare 𝐴𝐸𝐶 e
l’area del triangolo rettangolo 𝐸𝐷𝐶, rispettivamente, valgono
𝜋𝑟 2
𝑟2
𝑟2
𝑆=
, 𝑆(𝐴𝐸𝐶) = 𝛼 , 𝑆𝑇 (𝐸𝐷𝐶) = sin 𝛼 cos 𝛼 .
2
2
2
Non resta altro da fare che determinare l’angolo 𝛼, per cui
26
sin 𝛼 =
𝐸𝐷 √5
𝐷𝐶 2
𝐸𝐷 √5
=
, cos 𝛼 =
= , tan 𝛼 =
=
,
𝐶𝐸
3
𝐶𝐸 3
𝐷𝐶
2
da cui si ricava
𝛼 = tan−1
√5
≅ 0.841 ≅ 48.19° .
2
Si può, in definitiva, concludere che il rendimento richiesto risulta
𝑅=
𝑆 − 𝑆(𝐴𝐸𝐶) + 𝑆𝑇 (𝐸𝐷𝐶)
𝑆(𝐴𝐸𝐶) 𝑆𝑇 (𝐸𝐷𝐶)
= 1−
+
.
𝑆
𝑆
𝑆
Sostituendo i valori trovati in precedenza, si ottiene
𝑅 =1−
𝛼 sin 𝛼 cos 𝛼
2√5 1
2
+
=1+
− cos −1 ≅ 0.890 .
𝜋
𝜋
9𝜋
𝜋
3
Si osserva che il rendimento appena calcolato è tanto maggiore, quanto più grande
è la lunghezza d’onda di soglia, cioè quanto più l’angolo 𝛼 diventa piccolo.
27
6) Tra le piastre di un condensatore distanti tra loro 𝑑 sia applicata la differenza
di potenziale 𝑉. Elettroni di massa 𝑚 e carica 𝑒 vengono emessi da un punto del
catodo con energia cinetica 𝐾.
(𝑖) Determinare la massima distanza dalla perpendicolare a cui un elettrone può
raggiungere l’anodo.
⃗⃗ perpendicolare alle piastre e si determinino
(𝑖𝑖) Si applichi un campo magnetico 𝐵
i valori del campo magnetico per cui gli elettroni raggiungono il punto 𝐴. Si ricordi
che la forza esercitata dal campo magnetico è
⃗⃗
𝐹⃗ = 𝑞𝑣⃗ × 𝐵
e si trascuri la componente verticale della velocità iniziale.
28
Si tratta di un problema di Elettromagnetismo, ben formulato e non
eccessivamente complicato. Tuttavia, prima di entrare nel vivo della soluzione,
vale la pena osservare che gli elettroni vengono emessi dal punto 𝑂 del catodo in
maniera uniforme su una semisfera ed il modulo della velocità con la quale di
emissione è facilmente deducibile dall’energia cinetica
1
2𝐾
𝐾 = 𝑚𝑣 2 → 𝑣 = √ .
2
𝑚
(𝑖) La massima distanza dalla perpendicolare si raggiunge quando l’elettrone
viene emesso nella direzione 𝑥 parallela alla piastra, vale a dire quando la velocità
iniziale ha componente nulla di velocità nella direzione 𝑦 del campo elettrico, che
comunque vale
𝐸=
𝑉
.
𝑑
Detta 𝑎 l’accelerazione che l’elettrone subisce nel suo volo da una piastra all’altra
𝑎=
𝑒𝐸 𝑒𝑉
=
,
𝑚 𝑚𝑑
diretta verso il basso ed in direzione contraria a quella del campo elettrico, le
equazioni del moto sono
𝑎
𝑥(𝑡) = 𝑣𝑡 , 𝑦(𝑡) = − 𝑡 2 .
2
Il tempo necessario all’elettrone per raggiungere l’anodo 𝑦 = −𝑑 è pari a
29
2𝑑
2𝑚
𝑡0 = √ = 𝑑√
,
𝑎
𝑒𝑉
per cui la massima distanza dalla perpendicolare risulta
𝑥𝑚𝑎𝑥 = 𝑥(𝑡0 ) = 𝑣𝑡0 = 𝑣𝑑√
2𝑚
𝐾
= 2𝑑√ .
𝑒𝑉
𝑒𝑉
(𝑖𝑖) Il campo di induzione magnetica produce sull’elettrone una forza pari a
⃗⃗ .
𝐹⃗ = −𝑒𝑣⃗ × 𝐵
Essa è perpendicolare al campo stesso ed alla velocità, ha modulo pari a 𝑒𝑣𝐵, dove
⃗⃗. Il moto dell’elettrone
𝑣 è la componente della velocità ortogonale al campo 𝐵
⃗⃗ ed è un moto circolare uniforme, la cui
avviene in un piano ortogonale al campo 𝐵
pulsazione 𝜔 si ottiene uguagliando la forza di Lorentz e la forza centripeta, sicché
𝑣2
𝑣 𝑒𝐵
𝑚
= 𝑒𝑣𝐵 →
=
=𝜔.
𝑟
𝑟
𝑚
Si noti come la pulsazione di ciclotrone, come viene chiamata, non dipende dalla
velocità posseduta dall’elettrone e che dopo un tempo
𝑇=
2𝜋 2𝜋𝑚
=
𝜔
𝑒𝐵
L’elettrone ha percorso una intera circonferenza.
Lungo l’asse 𝑦, l’elettrone subisce sempre l’azione della differenza di potenziale 𝑉
e questo moto non è influenzato dal campo magnetico. L’elettrone, pertanto, è
30
animato da un moto elicoidale e passa per il punto 𝐴, cioè il piede della
perpendicolare, quando il tempo necessario a raggiungere l’anodo è un multiplo
intero 𝑛 del periodo di 𝑇. Si ha così
2𝑚 2𝜋𝑚
𝑑√
=
𝑛,
𝑒𝑉
𝑒𝐵
dove 𝑛 è un intero positivo. I valori del campo magnetico richiesti, in definitiva,
valgono
𝜋 2𝑚𝑉
𝐵𝑛 = 𝑛 √
𝑑
𝑒
Vale la pena notare che questi valori non dipendono dall’energia cinetica degli
elettroni, dato che la pulsazione non ne dipende e non ha alcun peso la
componente verticale della velocità.
31
7) Si consideri un circuito formato da un generatore di corrente 𝐼 e da una
resistenza 𝑅. La resistenza dipenda dalla temperatura con la legge
𝑇 2
𝑅(𝑇) = 𝑅0 [1 + ( ) ] .
𝑇0
Il conduttore disperde calore con legge 𝑃 = 𝐾(𝑇 − 𝑇1 ), dove 𝑃 è il calore dissipato
per unità di tempo e 𝑇1 è la temperatura dell’ambiente e 𝐾 una costante tipica del
materiale.
(𝑖) Qual è il massimo valore della corrente 𝐼𝑚𝑎𝑥 per cui è possibile un regime in
cui la temperatura della resistenza è costante nel tempo?
(𝑖𝑖) Discutere graficamente il caso in cui 𝐼 sia minore di 𝐼𝑚𝑎𝑥 e dire qual è la
soluzione stabile.
Il passaggio della corrente elettrica in un conduttore ne provoca il riscaldamento
e questo fenomeno prende il nome di effetto Joule. In un conduttore percorso da
corrente elettrica, gli elettroni si muovono velocemente e così facendo urtano gli
atomi, che aumentano l’ampiezza delle loro vibrazioni: questa agitazione
determina un aumento di temperatura.
32
Quanto maggiore è l'intensità della corrente, tanto più il filo conduttore si riscalda
e la quantità di calore prodotta è direttamente proporzionale alla resistenza del
conduttore. All’interno di tutti i circuiti, allora, parte dell’energia trasportata da
una corrente elettrica si disperde sotto forma di calore. Alcuni elettrodomestici
utilizzano proprio questo effetto termico della corrente per produrre calore.
L’asciugacapelli ed il ferro da stiro fondano il loro funzionamento proprio sulla
presenza di conduttori a grandissima resistenza, chiamati resistenze elettriche.
Per aumentare la loro resistenza, a questi conduttori viene conferita la forma di
fili lunghissimi e sottilissimi, a volte ripiegati su se stessi per renderli ancora più
lunghi. La stufa elettrica sfrutta l’effetto termico per mezzo di un filamento che
offre elevata resistenza elettrica e che, al passaggio della corrente elettrica,
diventa incandescente.
(𝑖) La potenza assorbita dal resistore assegnato, quando è percorso da una
corrente di intensità 𝐼, è pari a
𝑇 2 2
𝑃𝑅 = 𝑅(𝑇)𝐼 = 𝑅0 [1 + ( ) ] 𝐼
𝑇0
2
e viene trasformata in calore per effetto Joule. Questo calore si disperde
nell’ambiente esterno e, una volta raggiunta una condizione di equilibrio, si deve
verificare che la potenza assorbita dal resistore deve essere uguale a quella ceduta
all’ambiente esterno 𝑃, per cui
𝑇 2 2
𝑃𝑅 = 𝑃 → 𝑅0 [1 + ( ) ] 𝐼 = 𝐾(𝑇 − 𝑇1 ) .
𝑇0
Da questo bilancio delle potenze, si può ricavare la temperatura di equilibrio 𝑇.
Introdotte allora le quantità adimensionali
33
𝜃=
𝑇
𝑇1
𝐾𝑇0
, 𝜃1 =
, 𝑚=
,
𝑇0
𝑇0
𝑅0 𝐼 2
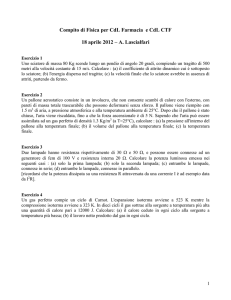
l’equazione precedente diventa
1 + 𝜃 2 = 𝑚(𝜃 − 𝜃1 )
e rappresenta l’intersezione tra la parabola 𝑦 = 1 + 𝜃 2 ed il fascio proprio di rette
𝑦 = 𝑚(𝜃 − 𝜃1 ). La generica retta del fascio può non intersecare proprio la
parabola, come accade per la retta rosa mostrata nella figura che segue, nel qual
caso non esiste una temperatura di equilibrio.
La retta può essere tangente alla parabola, come per la retta blu, nel qual caso
esiste un’unica temperatura di equilibrio. Infine, la retta può essere secante alla
parabola, come per la retta verde, e toccarla in due distinti punti, nel qual caso
34
esistono due temperature possibili di equilibrio. La figura precedente rende
concrete queste tre possibilità nel caso particolare 𝜃1 = 0.5.
Volendo ricavare analiticamente la temperatura di equilibrio, basta risolvere
l’equazione di secondo grado
𝜃 2 − 𝑚𝜃 + 1 + 𝑚𝜃1 = 0 (∆= 𝑚2 − 4𝑚𝜃1 − 4) ,
che ammette due radici reali e distinte quando ∆> 0, due radici reali e coincidente
quando ∆= 0, non ammette radici reali quando ∆< 0. Supponendo di raggiungere
un unico punto di equilibrio, risulta
𝜃=
𝑚
, essendo ∆= 𝑚2 − 4𝑚𝜃1 − 4 = 0 .
2
Scartata la radice negativa, che non ha alcun senso fisico, è possibile determinare
il valore di 𝑚
𝑚 = 2𝜃1 + 2√1 + 𝜃12 ,
da cui si può finalmente scrivere il valore della temperatura di equilibrio
𝜃𝐸 = 𝜃1 + √1 + 𝜃12 → 𝑇𝐸 = 𝑇1 + √𝑇02 + 𝑇12 .
Dal valore di 𝑚 calcolato si valuta, poi, la massima corrente che può fluire nel
resistore
𝐾𝑇0
𝑇1
𝑇12
𝑇𝐸
𝐾
√
√
=
2
+
1
+
=
2
→
𝐼
=
𝑇
.
(
)
𝑚𝑎𝑥
0
2
𝑅0 𝐼𝑚𝑎𝑥
𝑇0
𝑇0
2𝑇𝐸 𝑅0
𝑇02
35
(𝑖𝑖) Nel caso in cui 𝐼 è minore di 𝐼𝑚𝑎𝑥 , essendo 𝑚 inversamente proporzionale, vi
sono due intersezioni tra parabola e fascio di rette. Precisamente, vi sono due
possibili situazioni di equilibrio: una stabile, il punto a temperatura più bassa 𝑇1 ;
l’altra instabile, il punto a temperatura più alta 𝑇2 . Per completare, si deve spiegare
il meccanismo che determina l’instabilità.
Se durante il funzionamento del resistore, per una qualsiasi perturbazione
aumenta la temperatura interna, il calore prodotto viene solo in parte ad essere
ceduto all’ambiente, dato che la parabola cresce più rapidamente della retta
secante. L’aumento della temperatura determina un aumento indesiderato ed
incontrollabile del valore della resistenza, che, a sua volta, provoca un ulteriore
aumento della potenza da dissipare sotto forma di calore, che fa ulteriormente
aumentare la temperatura, e così via. Questa situazione innesca un meccanismo
36
di reazione positiva denominato fuga termica che porta repentinamente alla
distruzione del resistore per il superamento della massima temperatura prevista
dal costruttore. In maniera duale si ragiona per dimostrare che l’altro punto è un
punto di equilibrio stabile.
Comunque sia, dal punto di vista matematico, si ha equilibrio stabile oppure
instabile, confrontando le derivate delle due curve che si intersecano: se il
coefficiente angolare della retta, cioè la pendenza, è maggiore della derivata della
curva di intersezione, il punto di equilibrio è stabile. Viceversa, si è in presenza di
un punto di equilibrio instabile.
37