Anno accademico 1971-1972
Dissertazione: Statica e dinamica dei fluidi.
1) Si consideri il moto di un elettrone in un campo magnetico costante ed
⃗.
omogeneo 𝐵
(𝑎) In quali condizioni la velocità 𝑣 dell’elettrone rimane costante nel tempo?
(𝑏) Il lavoro fatto dalla forza agente sull’elettrone è positivo, negativo o nullo?
(𝑐) Come dipende dal tempo il modulo di 𝑣?
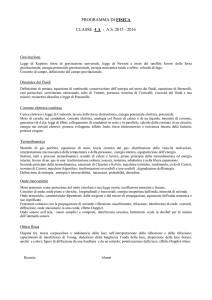
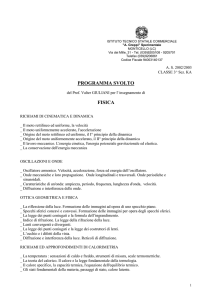
Una carica 𝑞 che si muove con velocità 𝑣 perpendicolarmente alle linee di forza di
⃗ è sottoposta alla forza di Lorentz
un campo magnetico uniforme 𝐵
⃗ .
𝐹 = 𝑞𝑣 × 𝐵
Ora, il vettore velocità ha in generale due componenti: una parallela al campo 𝑣∥ =
⃗,
𝑣 cos 𝛼, un’altra ortogonale ad esso 𝑣⊥ = 𝑣 sin 𝛼, essendo è l’angolo tra 𝑣 e 𝐵
come illustra la figura che segue.
In termini quantitativi, dato che
⃗ = ⃗0 ,
𝑞𝑣∥ × 𝐵
2
si può scrivere che
⃗ = 𝑞(𝑣∥ + 𝑣⊥ ) × 𝐵
⃗ = 𝑞𝑣⊥ × 𝐵
⃗
𝐹 = 𝑞𝑣 × 𝐵
Ed affermare che il campo di induzione magnetica agisce soltanto sulla
componente ortogonale della velocità.
(𝑎) Ebbene, escludendo il caso banale di assenza di campo, il vettore velocità 𝑣
rimane costante nel tempo, solo se esso è parallelo al campo di induzione
magnetica. Pertanto, se accade che 𝛼 = ±𝜋/2, allora
𝑣 = ±𝑣∥
ed il campo non ha alcun effetto sul moto dell’elettrone. Comunque sia, l’elettrone
è animato da un moto rettilineo ed uniforme nella direzione del campo magnetico
oppure in quella opposta, che rimane imperturbato dalla presenza del campo.
L’effetto della componente ortogonale al campo consiste solo in un cambio
continuo di direzione, che non altera l’intensità di questa componente della
velocità, che rimane costante nel tempo. Pertanto, questa forza svolge il ruolo di
forza centripeta e la carica si muove di moto circolare uniforme, per cui
|𝑞|𝐵
𝑣⊥2
𝑚𝑣⊥
𝑚
= |𝑞|𝑣𝐵 → 𝑅 =
, 𝑓=
.
|𝑞|𝐵
𝑅
2𝜋𝑚
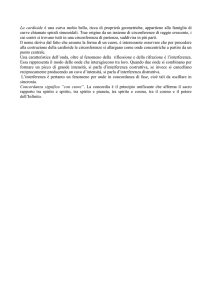
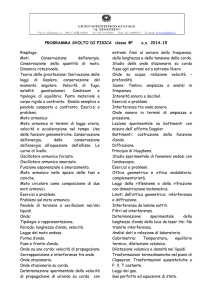
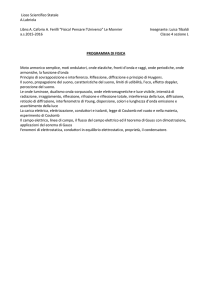
La figura che segue mostra il moto di un elettrone, che ha carica 𝑞 = −𝑒, quando
viene inviato ortogonalmente 𝑣 = 𝑣⊥ alle linee di campo.
3
Dalle relazioni trovate si nota che il raggio della circonferenza descritta dalla
carica è direttamente proporzionale alla quantità di moto della carica ed
inversamente proporzionale al campo magnetico.
⃗ che a 𝑣 ed il suo verso lo si ottiene
La direzione della forza è perpendicolare sia a 𝐵
ponendo le dita tese della mano destra nel verso delle linee di forza del campo,
pollice nel verso del moto della particella, la forza è entrante nel palmo della mano
se la carica è negativa, uscente se è positiva. La frequenza del moto, chiamata
frequenza di ciclotrone, il corrispondente periodo e la velocità angolare sono
indipendenti dalla velocità. Le cariche veloci si muovono su grandi circonferenze,
quelle lente su circonferenze piccole, ma tutte le cariche impiegano lo stesso
tempo per compiere un giro. In realtà, ciò è vero soltanto quando si può trascurare
la variazione della massa con la velocità della carica, cioè per cariche con velocità
piccola rispetto a quella della luce.
La caratteristica della forza di Lorentz di essere perpendicolare al vettore velocità
e quindi allo spostamento la rende molto diversa dalle altre forze. Infatti, ad
esempio, la forza gravitazionale ed elettrica agiscono sempre nella direzione del
4
movimento, invece la forza di Lorentz non è in grado di spingere o tirare, ma solo
di deflettere. Una conseguenza di questa peculiarità è che la forza di Lorentz è
⃗ , mentre nel
perpendicolare alle linee di forza del campo magnetico e quindi a 𝐵
caso del campo elettrico il vettore 𝐸⃗ e la forza elettrica sono entrambi tangenti
alle linee di forza.
(𝑏) Essendo la forza di Lorentz perpendicolare alla velocità, quindi allo
spostamento, essa non compie lavoro e non produce alcun cambiamento
nell’energia cinetica e nella velocità della carica.
⃗ trasla
(𝑐) Nel caso generale, la particella mentre ruota perpendicolarmente a 𝐵
nella direzione del campo magnetico per effetto di 𝑣⊥ . La composizione di questi
due movimenti è un moto elicoidale la cui traiettoria è un’elica cilindrica.
Il raggio dell’elica vale
𝑅=
𝑚𝑣⊥ 𝑚𝑣 sin 𝛼
=
,
|𝑞|𝐵
|𝑞|𝐵
mentre il passo dell’elica, cioè la distanza tra spire adiacenti, è definito dal
prodotto del periodo di rotazione 𝑇 della carica ed è pari a
5
ℎ = 𝑣∥ 𝑇 = 𝑣
2𝜋𝑚
cos 𝛼 .
|𝑞|𝐵
Si verifica facilmente che, poiché nessuna delle due componenti dipende dal
tempo, nemmeno 𝑣, il modulo de vettore velocità, dipende dal tempo. Inoltre, la
relazione generale è identicamente verificata
𝑣 2 = 𝑣∥2 + 𝑣⊥2
e da essa discende che
√𝑅 2 + ℎ 2 =
6
𝑚𝑣
.
|𝑞|𝐵
2) Un corpo di massa 𝑚 è attratto verso un centro fisso da una forza 𝐹(𝑟)
dipendente solo dalla distanza 𝑟.
(a) Dimostrare che sono possibili dei moti circolari uniformi per questo corpo.
(b) Per uno qualunque di questi moti circolari, come dipende il periodo dal
raggio?
(c) La risposta alla domanda precedente è connessa con la terza legge di Keplero?
Una forza esterna agente su un punto materiale è detta centrale se la forza è
sempre diretta lungo la retta congiungente la posizione del corpo ed un punto
fisso talvolta chiamato centro delle forze. Se si immagina di scegliere l’origine del
sistema di coordinate con tale centro fisso, allora la forza 𝐹 è sempre parallela al
vettore posizione 𝑟.
Esempi di forze centrali sono la forza gravitazionale, proporzionale all’inverso del
quadrato della distanza dal centro delle forze, di verso opposto al vettore
posizione (forza attrattiva), la forza elettrostatica, proporzionale all’inverso del
quadrato della distanza dal centro delle forze, con il segno delle cariche elettriche
interagenti si decide se è attrattiva o repulsiva, la forza elastica, nel caso di una
molla ancorata nell'origine del sistema di riferimento, proporzionale
all’allungamento della molla, di verso opposto al vettore posizione (forza
attrattiva).
7
Le forze centrali sono dette a simmetria sferica, se il modulo della forza dipende
unicamente dalla distanza tra il punto di applicazione ed il centro. Le forze
centrali a simmetria sferica sono forze conservative, dato che il lavoro non
dipenda dalla curva su cui è stato calcolato. Si consideri una forza centrale
𝐹 = 𝐹(𝑟) 𝑟̂ ,
in cui 𝑟̂ è il versore relativo al vettore posizione, ed un qualsiasi percorso Γ di
estremi 𝐴 e 𝐵.
Il lavoro compiuto per spostare lungo Γ la massa 𝑚 vale
𝐵
𝐵
𝑟𝐵
𝐿𝐴𝐵 = ∫ 𝐹 ∙ 𝜏̂ 𝑑𝑙 = ∫ 𝐹(𝑟) 𝑟̂ ∙ 𝜏̂ 𝑑𝑙 = ∫ 𝐹(𝑟) 𝑑𝑟 ,
𝐴
𝐴
𝑟𝐴
in cui si è osservato che il prodotto scalare 𝑟̂ ∙ 𝜏̂ 𝑑𝑙 proprio la proiezione dello
spostamento infinitesimo 𝜏̂ 𝑑𝑙 lungo il versore posizione 𝑟̂ . L’ultimo integrale
scritto non dipende più dalla linea che congiunge i due punti 𝐴 e 𝐵.
Orbene, in forza della conservatività, si può introdurre l’energia potenziale
8
∞
𝑈(𝑟) = ∫ 𝐹(𝑢) 𝑑𝑢 .
𝑟
Per rendere più concrete le cose dette, si esamini il caso della forza gravitazionale
𝐹(𝑟) = −𝐺
𝑚𝑀
,
𝑟2
in cui il segno meno tiene conto del fatto che la forza è attrattiva. In questo caso
particolare risulta
∞
𝑈(𝑟) = ∫ 𝐹(𝑢) 𝑑𝑢 = −𝐺
𝑟
𝑚𝑀
𝑚𝑀
𝑚𝑀
, 𝐿𝐴𝐵 = 𝑈𝐴 − 𝑈𝐵 = 𝐺
−𝐺
.
𝑟
𝑟𝐵
𝑟𝐴
Fatte queste premesse, si vuole studiare il moto di una particella di massa 𝑚 in un
generico campo di forze centrali, che è descritto dalla funzione energia potenziale
𝑈 = 𝑈(𝑟), note che siano la posizione iniziale 𝑟0 e la velocità iniziale 𝑣0 della
particella. In altri termini, si desidera determinare le equazioni orarie e la
traiettoria del moto.
9
Dato che un campo di forze centrali ha simmetria sferica, è più conveniente
esprimere il moto in coordinate polari, come quelle mostrate nella figura
precedente, per cui
𝑟 ≥ 0 , 0 ≤ 𝜃 < 2𝜋 , 0 ≤ 𝜑 ≤ 𝜋 .
Le equazioni che descrivono il moto e che vanno ricercate sono
𝑟 = 𝑟(𝑡) ,
le equazioni orarie → { 𝜃 = 𝜃(𝑡) ,
𝜑 = 𝜑(𝑡) ,
la traiettoria →
𝑟 = 𝑟(𝜃, 𝜑) .
Un campo di forze centrali è conservativo, per cui l’energia meccanica 𝐸 della
particella, data dalla somma dell’energia cinetica e dell’energia potenziale
1
𝐸 = 𝑚𝑣 2 + 𝑈(𝑟) ,
2
rimane costante nel tempo e nello spazio. Il suo valore è determinato dalle
condizioni iniziali
1
1
𝐸 = 𝑚𝑣 2 + 𝑈(𝑟) = 𝑚𝑣02 + 𝑈(𝑟0 ) .
2
2
In un campo centrale il momento meccanico rispetto al polo 𝑂 è nullo
⃗⃗ = 𝑟 × 𝐹 = ⃗0 ,
𝑀
dato che forza 𝐹 e raggio vettore 𝑟 sono paralleli. Da ciò discende che il momento
angolare 𝐿⃗ = 𝑟 × 𝑚𝑣 si conserva, essendo
10
⃗⃗ =
𝑀
𝑑𝐿⃗
⃗ → 𝐿⃗ = 𝐿⃗0 = 𝑟0 × 𝑚𝑣0 .
=0
𝑑𝑡
Dalla conservazione della direzione del momento angolare si deduce che il moto
si svolge sempre sul piano definito dai vettori 𝑟0 e 𝑣0 , cioè la terza coordinata 𝜑 è
costante. Ne consegue che la traiettoria della particella giace sul piano normale
alla direzione del vettore 𝐿⃗0 e l’equazione della traiettoria sarà semplicemente
𝑟 = 𝑟(𝜃) , con 𝜑 costante .
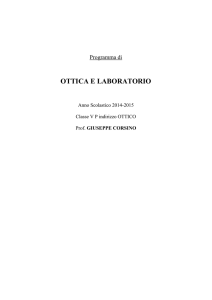
Inoltre, facendo riferimento alla figura che segue, i segmento 𝑂𝐴 ed 𝑂𝐵
rappresentano i raggi vettore agli istante 𝑡 e 𝑡 + ∆𝑡, mentre il segmento 𝐴𝐵
rappresenta la traiettoria del corpo nel tempo 𝛥𝑡.
Se 𝛥𝑡 è sufficientemente piccolo, allora 𝐴𝐵 può essere approssimato da un
segmento di retta. Sia inoltre 𝜃 l’angolo tra il raggio vettore ed 𝐴𝐵. Nel tempo 𝛥𝑡
viene quindi descritta un’area
1
∆𝑆 = 𝑂𝐴 ∙ 𝐴𝐵 sin 𝜃 .
2
La velocità areolare 𝑣𝐴 è definita come
11
∆𝑆 1
= 𝑣𝑟 sin 𝜃 ,
∆𝑡→0 ∆𝑡
2
𝑣𝐴 = lim
essendo la velocità orbitale istantanea pari a
𝐴𝐵
.
∆𝑡→0 ∆𝑡
𝑣 = lim
Poiché 𝑣𝑟 sin 𝜃 = 𝐿 è proprio il modulo del momento angolare, risulta
𝑣𝐴 =
𝐿
.
2𝑚
Dunque, se 𝐿 è costante, anche la velocità areolare lo è.
(𝑎) Tra tutte le possibili traiettorie esiste anche quella che descrive una
circonferenza di generico raggio 𝑟0 , lungo la quale il corpo si muove con velocità
in modulo costante. Se il corpo si muove di moto circolare uniforme, allora si può
scrivere che
𝑟(𝑡) = 𝑟0 , 𝑣(𝑡) = 𝑣0 ∀𝑡 ,
cioè la velocità istantanea cambia in direzione, ma non cambia il modulo durante
il moto. Per determinare la forza che sostiene un tal moto, si introduca, come
suggerito nella figura che segue, per prima cosa il versore
𝑟̂ = 𝑥̂ cos 𝜃 + 𝑦̂ sin 𝜃 ,
poi il vettore posizione
12
𝑟(𝑡) = 𝑟0 𝑟̂ = 𝑟0 (𝑥̂ cos 𝜃 + 𝑦̂ sin 𝜃) .
Dato che la velocità angolare è costante e definita come
𝜔=
𝑑𝜃
,
𝑑𝑡
si ricava facilmente l’espressione della velocità
𝑣=
𝑑𝑟
𝑑𝜃
(−𝑥̂ sin 𝜃 + 𝑦̂ cos 𝜃) = 𝜔𝑟0 𝜏̂ .
= 𝑟0
𝑑𝑡
𝑑𝑡
Il versore tangente è definito dalla relazione
𝜏̂ = −𝑥̂ sin 𝜃 + 𝑦̂ cos 𝜃 ,
come si verifica agevolmente dalla figura precedentemente riportata. E, poiché
𝑑𝜏̂
= −𝜔(𝑥̂ cos 𝜃 + 𝑦̂ sin 𝜃) = −𝜔𝑟̂ ,
𝑑𝑡
13
si ottiene che l’accelerazione (centripeta) vale
𝑎=
𝑑𝑣
= −𝜔2 𝑟0 𝑟̂
𝑑𝑡
e mostra tutte le caratteristiche di un moto in un campo centrale con
𝐹 = 𝑚𝑎 = −𝑚𝜔2 𝑟0 𝑟̂ .
(𝑏) Se si vuole calcolare la velocità di un pianeta in orbita 𝑣 di un pianeta di massa
𝑚 intorno al Sole di massa 𝑀, si deve uguagliare la forza di attrazione
gravitazionale con la forza centripeta
𝐺
𝑀𝑚 𝑚𝑣 2 4𝜋 2 𝑟
4𝜋 2 3
2
=
=
→
𝑇
=
𝑟 ,
𝑟2
𝑟
𝑇2
𝐺𝑀
vale a dire che il quadrato del periodo di rivoluzione è proporzionale al cubo del
raggio dell’orbita.
(𝑐) Se si introduce la costante 𝑘 = 4𝜋 2 /(𝐺𝑀), l’ultima relazione scritta diventa
proprio la terza Legge di Keplero, detta dei periodi, pubblicata nel 1619, che
afferma che i quadrati dei tempi che i pianeti impiegano a percorrere le loro orbite
sono proporzionali ai cubi delle loro distanze medie dal Sole, vale a scrivere
𝑇 2 = 𝑘𝑟 3 .
14
3) Si considerino due corpi 𝑃1 e 𝑃2 di massa rispettivamente 𝑚1 ed 𝑚2 , vincolati a
muoversi senza attrito lungo una retta 𝑟. All’inizio 𝑃2 è fermo, mentre 𝑃1 si muove
con velocità 𝑣 verso 𝑃2 . Come è noto, durante il processo d’urto la quantità di
moto, data da 𝑚1 𝑣1 + 𝑚2 𝑣2 , rimane costante (𝑣1 e 𝑣2 sono le velocità algebriche,
quindi con segno, dei corpi 𝑃1 e 𝑃2 lungo la retta 𝑟).
Si determini quanto vale la massima quantità di calore che si può sviluppare
durante l’urto. Ammettiamo che 𝑚1 sia minore di 𝑚2 : scambiando il ruolo dei due
corpi nello stato iniziale, lasciando invariata 𝑣, questa quantità di calore risulterà
maggiore, minore o uguale? Si giustifichi la risposta.
In Fisica, il fenomeno che si produce quando si incontrano due corpi in moto uno
rispetto all’altro, sia che entrino in contatto diretto, sia che interagiscano tra loro
mediante campi di forze, viene detto urto.
L’applicazione del principio di conservazione al caso dell’urto in esame fornisce
la relazione
𝑚1 𝑣 = 𝑚1 𝑣1𝐹 + 𝑚2 𝑣2𝐹 ,
dove 𝑣1𝐹 e 𝑣2𝐹 sono le velocità dei corpi dopo l’urto. Per un urto normale la
velocità relativa dei corpi dopo l’urto è proporzionale a quella precedente l’urto
attraverso un coefficiente di ritorno legato alle elasticità dei due corpi
𝑣1𝐹 − 𝑣2𝐹 = −𝜀𝑣 , con 0 ≤ 𝜀 ≤ 1 .
Se 𝜀 = 0, l’urto è detto completamente anelastico; se 𝜀 = 1, l’urto è detto elastico.
15
Risolvendo il sistema costituito dalle due equazioni scritte, si ottengono le due
velocità dei due punti dopo l’urto
𝑣1𝐹 =
𝑚1 − 𝜀𝑚2
𝑚1 (1 + 𝜀)
𝑣 , 𝑣2𝐹 =
𝑣.
𝑚1 + 𝑚2
𝑚1 + 𝑚2
In un urto elastico l’energia cinetica si conserva e resta la stessa prima e dopo
l’urto. Se l’energia cinetica dei corpi è stata parzialmente dissipata nell’urto, allora
si parla di urto anelastico. In quest’ultimo caso, si può dimostrare che l’energia
cinetica dissipata è la massima possibile, dovendo comunque rispettare la
conservazione della quantità di moto totale, nel caso di urto totalmente
anelastico, poiché i due corpi procedono alla stessa velocità dopo l’urto. Secondo
il primo principio della termodinamica, la parte di energia cinetica dissipata viene
convertita in energia interna dei corpi coinvolti nell’urto, cioè in generale in parte
in calore e in parte in lavoro termodinamico dei corpi stessi.
Si determina anzitutto l’energia cinetica finale posseduta dal sistema della due
particelle
1
1
1
𝑚 + 𝜀 2 𝑚2 1
𝜀2 − 1
2
2
2 1
2
𝐾𝐹 = 𝑚1 𝑣1𝐹 + 𝑚2 𝑣2𝐹 = 𝑚1 𝑣
= 𝑚1 𝑣 (1 +
𝑚 ),
2
2
2
𝑚1 + 𝑚2
2
𝑚1 + 𝑚2 2
poi quella inizialmente posseduta
1
𝐾0 = 𝑚1 𝑣 2 .
2
Infine, si determina la variazione di energia cinetica
1
1 − 𝜀2
∆𝐾 = 𝐾0 − 𝐾𝐹 = 𝑚1 𝑣 2
𝑚 .
2
𝑚1 + 𝑚2 2
16
Si osserva che questa variazione di energia, come già anticipato, dipende dal tipo
di urto, cioè dipende da 𝜀. Studiando la parabola
1
1 − 𝜀2
2
∆𝐾(𝜀) = 𝑚1 𝑣
𝑚 , con 0 ≤ 𝜀 ≤ 1 ,
2
𝑚1 + 𝑚2 2
si conclude che la massima escursione di energia cinetica si ottiene quando l’urto
è completamente anelastico e vale
1
𝑚2
∆𝐾(𝜀 = 0) = 𝑚1 𝑣 2
.
2
𝑚1 + 𝑚2
Si nota pure che, scambiando il ruolo dei due corpi nello stato iniziale, lasciando
invariata 𝑣, questa quantità di calore risulterà sempre la stessa.
17
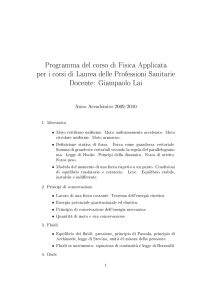
4) Un esperimento di interferenza può essere effettuato con il dispositivo
mostrato nella figura. 𝑆 è una sorgente puntiforme di luce monocromatica non
polarizzata. 𝑆1 e 𝑆2 sono due piccoli fori praticati in uno schermo opaco e Σ è il
piano su cui si osservano le frange di interferenza.
L’interferenza fra le onde provenienti da 𝑆1 ed 𝑆2 esiste effettivamente nei
seguenti casi?
(𝑎) Un filtro polarizzatore 𝐹1 è messo di fronte ad 𝑆.
(𝑏) Due filtri polarizzatori 𝐹2 ed 𝐹3 sono messi davanti a 𝑆1 e 𝑆2 . I loro assi di
trasmissione sono a 90° fra di loro e a 45° con 𝐹1 .
(𝑐) Un quarto filtro 𝐹4 è messo di fronte al piano Σ con asse parallelo a quello di
𝐹1 .
Per discutere compiutamente l’esercizio proposto, è necessario fare alcune
premesse, al fine di mettere in chiaro i concetti che si discuteremo.
Prima premessa: che cosa è l’interferenza?
Il fenomeno dell’interferenza è dovuto alla sovrapposizione, in un punto dello
spazio, di due o più onde. Quello che si osserva è che l’intensità dell’onda
risultante in quel punto può essere diversa rispetto alla somma delle intensità
associate ad ogni singola onda di partenza; in particolare, essa può variare tra un
minimo, in corrispondenza del quale non si osserva alcun fenomeno ondulatorio,
ed un massimo superiore alla somma delle intensità. In generale, si dice che
18
l’interferenza è costruttiva quando l’intensità risultante è maggiore rispetto alla
somma di ogni singola intensità originaria, è distruttiva in caso contrario. Il
termine viene usualmente utilizzato per parlare di interferenza tra due onde
coerenti, di norma provenienti dalla stessa sorgente. I fenomeni d’interferenza
che si osservano quotidianamente possono essere, ad esempio, quelli che
riguardano le increspature che si formano su uno specchio d’acqua, oppure i
battimenti tra onde sonore.
Ma allora per quale motivo non si osservano gli effetti prodotti dall’interferenza,
utilizzando luce visibile? Con luce generata da sorgenti luminose come il Sole, le
lampade ad incandescenza oppure a fluorescenza non si osserva il fenomeno
dell’interferenza costruttiva e distruttiva; piuttosto l’intensità luminosa in ogni
punto è data dalla somma delle intensità dovute alle singole onde. La luce emessa
da queste sorgenti è prodotta, a livello atomico, da un numero elevato di sorgenti
tra loro indipendenti. Le onde prodotte sono tra loro incoerenti, cioè non
mantengono una relazione di fase costante. Quindi, nota la fase dell’onda in un
punto, non si può prevedere in alcun modo la fase dell’onda in un altro punto e
non si può dire, per esempio, se l’onda è in un massimo oppure in un minimo.
Onde incoerenti presentano rapide fluttuazioni di fase ed il risultato è una media
degli effetti di interferenza, cosicché l’intensità totale, ovvero l’energia per unità
di area è data dalla somma delle intensità delle singole onde. Solo la
sovrapposizione di onde coerenti produce il fenomeno dell’interferenza. Le onde
coerenti infatti si trovano in una relazione di fase costante tra loro. Le onde
coerenti ed incoerenti rappresentano delle estreme idealizzazioni: in generale,
tutte le onde reali si trovano in situazioni intermedie tra questi due limiti. La luce
emessa da un laser può essere altamente coerente e due punti nel fascio possono
essere coerenti anche se separati da diversi chilometri. La luce emessa da una
sorgente puntiforme molto distante, come per esempio la luce generata da una
stella o dal Sole, presenta soltanto qualche grado di coerenza.
19
Thomas Young (1773-1829) effettuò i primi esperimenti di interferenza della luce
visibile, ideando un sistema geniale per ottenere due o più sorgenti di luce
coerente partendo da una unica sorgente luminosa, come mostrato nella figura
che segue. Quando una sottile fenditura viene illuminata, l’onda luminosa che
attraversa la fenditura subisce diffrazione. La fenditura diviene quindi una
sorgente coerente che viene utilizzata per illuminare due altre fenditure che si
comportano come due nuove sorgenti di luce coerente producendo interferenza.
Nel caso dell’esercizio in esame, si supporrà che la sorgente S emetta una
radiazione coerente.
Seconda premessa: che cos’è la polarizzazione?
Nel 1937, l’inventore ed imprenditore statunitense Edwin Herbert Land scoprì un
materiale, detto polaroid, che polarizza la luce mediante assorbimento selettivo
da parte di molecole orientate. Fabbricato in fogli sottili di idrocarburi sottoposti
a tensione in modo da allineare le catene molecolari. Successivamente i fogli sono
immersi in una soluzione contenente iodio con le molecole che diventano
conduttrici, con conduzione lungo le catene. Perciò le molecole assorbono con
efficienza la luce con il campo elettrico parallelo alla lunghezza e trasmettono la
20
luce con campo elettrico ortogonale. La direzione alle catene è detta asse di
trasmissione.
Per comprendere come funziona una lamina polarizzatrice, si osservi la figura
precedente, in cui un fascio di luce non polarizzata incide sulla prima lamina
polarizzatrice, detta polarizzatore. L’asse è verticale e quindi la luce trasmessa è
polarizzata verticalmente. Una seconda lamina polarizzatrice, detta analizzatore,
con asse che forma 𝜃 con quello del polarizzatore è posta sul fascio. 𝐸⃗0 è il vettore
campo
elettrico
trasmesso:
la
componente
di
𝐸⃗0
parallela
all’asse
dell’analizzatore, che vale 𝐸0 cos 𝜃, viene trasmessa. L’intensità del fascio
trasmesso attraverso il polarizzatore è, secondo la Legge di Malus
𝐼 = 𝑘𝐼0 cos 2 𝛼𝜃
dove 𝑘 è il coefficiente di trasmissione e 𝐼0 è l’intensità della luce incidente. In un
polarizzatore reale 𝑘 dipende dalla lunghezza d’onda della radiazione e per la luce
bianca assume valori dell’ordine di 0.4. Il piano di polarizzazione di un’onda
elettromagnetica è, dunque, il piano formato dalla direzione di propagazione
dell’onda con la direzione del vettore campo elettrico 𝐸⃗ .
In definitiva, una lamina polarizzatrice è costituita da materiale otticamente
anisotropo che lascia passare la componente del campo elettrico parallela al suo
21
asse di trasmissione ed assorbe fortemente la componente del campo elettrico
perpendicolare all’asse di trasmissione. La direzione di polarizzazione è fissata
nel processo di fabbricazione della lamina.
(𝑎) Un filtro polarizzatore 𝐹1 è messo di fronte ad 𝑆. Quando la luce della sorgente
𝑆 viene polarizzata, ad esempio con asse di trasmissione perpendicolare al piano
della figura che segue, su ciascuna delle fenditure si ha diffrazione di questa luce
coerente e, di conseguenza, si crea una complessa figura di interferenza sullo
schermo terminale, che richiede una lunga trattazione matematica, per essere
esplicitata.
È importante notare che il fenomeno dell’interferenza legato al passaggio delle
luce attraverso due o più fenditure non può essere separato dal contributo della
diffrazione. Avviene infatti che, passando attraverso ciascuna fenditura la luce
subisce la diffrazione e la luce diffratta da una delle due (o più) fenditure si
sovrappone a quella diffratta dall’altra. Nella regione di sovrapposizione le onde
luminose interferiscono costruttivamente (luce intensa) nei punti in cui esse
giungono in fase mentre interferiranno distruttivamente (buio) laddove giungono
sfasate di mezza lunghezza d’onda. Tuttavia, volendo separare i due effetti, si può
22
supporre che l’ampiezza delle fenditure 𝛿 sia molto più piccola della lunghezza
d’onda della luce incidente 𝜆: sotto questa ipotesi, cioè 𝛿 ≪ 𝜆, gli effetti diffrattivi
saranno marginali e sullo schermo, che si suppone sempre a grande distanza dalle
fenditure, si osserverà una figura interferenziale.
Le due fenditure uguali, poste a distanza 𝑎, sono le sorgenti di due onde
elettromagnetiche di stessa frequenza 𝑓, che si comportano, a grandi distanza,
come onde piane
𝐸1 = 𝐸0 sin(𝑘𝑟1 − 𝜔𝑡) , 𝐸2 = 𝐸0 sin(𝑘𝑟2 − 𝜔𝑡) ,
essendo 𝑘 = 2𝜋/𝜆 il cosiddetto numero d’onda e 𝜔 = 2𝜋𝑓 la pulsazione. La natura
vettoriale del problema è superflua, dato che si è supposto che le onde siano
polarizzate in direzione perpendicolare al piano di figura. Il campo risultante nel
generico punto 𝑃 dello schermo vale
𝐸(𝑃, 𝑡) = 𝐸1 (𝑃, 𝑡) + 𝐸2 (𝑃, 𝑡) = 𝐸0 sin(𝑘𝑟1 − 𝜔𝑡) + 𝐸0 sin(𝑘𝑟2 − 𝜔𝑡) .
23
Applicando la prima formula di prostaferesi
sin 𝛼 + sin 𝛽 = 2 sin
𝛼+𝛽
𝛼−𝛽
cos
,
2
2
si ottiene la nuova rappresentazione del campo totale
𝑘
𝐸(𝑃, 𝑡) = 𝐸1 (𝑃, 𝑡) + 𝐸2 (𝑃, 𝑡) = 2𝐸0 sin[𝑘(𝑟1 + 𝑟2 ) − 𝜔𝑡] cos [ (𝑟1 − 𝑟2 )] .
2
Dato che la quantità che si misura o si vede è l’intensità media 𝐼 della radiazione,
si può scrivere
𝑇
𝐴 𝑇 2
4𝐴𝐸02
𝑘
2
𝐼 = ∫ 𝐸 (𝑃, 𝑡) 𝑑𝑡 =
cos [ (𝑟1 − 𝑟2 )] ∫ sin2 [𝑘(𝑟1 + 𝑟2 ) − 𝜔𝑡] 𝑑𝑡 ,
𝑇 0
𝑇
2
0
con 𝐴 opportuna costante di proporzionalità. Per sviluppare questo integrale,
basta ricordare che
1 𝑇 2
1
∫ sin [𝑘(𝑟1 + 𝑟2 ) − 𝜔𝑡] 𝑑𝑡 = ,
𝑇 0
2
in modo tale da poter scrivere
𝐼 = 2𝐴𝐸02 cos 2 [𝑘(𝑟1 − 𝑟2 )] .
Se lo schermo è lontano, 𝑟1 e 𝑟2 sono praticamente paralleli e, quindi,
𝑘
𝑘𝑎
𝜋𝑎
(𝑟1 − 𝑟2 ) ≅
sin 𝜃 =
sin 𝜃 .
2
2
𝜆
24
In definitiva, l’intensità luminosa media raccolta sullo schermo ha la seguente
forma funzionale
𝜋𝑎
𝐼 = 𝐼𝑀 cos 2 ( sin 𝜃) ,
𝜆
in cui, per brevità, si è introdotto il valore massimo
𝐼𝑀 = 2𝐴𝐸02 .
Si ha interferenza costruttiva, se 𝐼 = 𝐼𝑀 e la differenza di cammino ottico percorso
dalle onde è un multiplo intero della comune lunghezza d’onda
𝜋𝑎
sin 𝜃 = 𝑚𝜋 → 𝑟1 − 𝑟2 ≅ 𝑎 sin 𝜃 = 𝑚𝜆 , 𝑚 ∈ ℤ ,
𝜆
mentre si ha interferenza distruttiva, se 𝐼 = 0 e la differenza di cammino ottico
percorso dalle onde è un multiplo semi-intero della lunghezza d’onda
𝜋𝑎
1
1
sin 𝜃 = (𝑚 + ) 𝜋 → 𝑟1 − 𝑟2 ≅ 𝑎 sin 𝜃 = (𝑚 + ) 𝜆 , 𝑚 ∈ ℤ .
𝜆
2
2
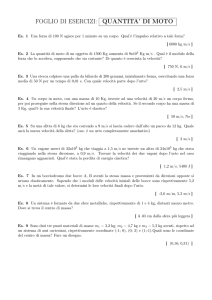
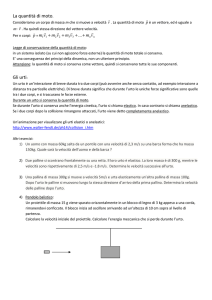
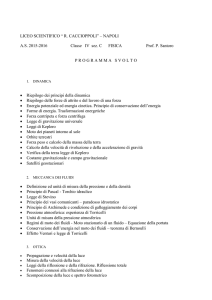
Si conclude che due fasci di luce coerente e monocromatica con stati di
polarizzazione tra loro paralleli interferiranno sempre e la figura che segue
rappresenta l’andamento dell’intensità media sui punti dello schermo;
precisamente, per adimensionalizzare il grafico, si è scelto di rappresentare,
rispettivamente, in ascisse ed in ordinate
𝑥=
𝑎
𝐼
sin 𝜃 , 𝑦 =
.
𝜆
𝐼𝑀
25
In maniera analoga si studia l’interferenza prodotta da 𝑁 sorgenti coerenti
sincrone.
(𝑏) Due filtri polarizzatori 𝐹2 ed 𝐹3 sono messi davanti a 𝑆1 e 𝑆2 . I loro assi di
trasmissione sono a 90° fra di loro e a 45° con 𝐹1 . Si vuole ora dimostrare che due
fasci di luce coerente, con stati di polarizzazione tra loro ortogonali, non
interferiscono e le frange non si formano. La presenza dei filtri davanti alle due
fenditure produce l’effetto di trasmettere due campi elettrici ortogonali
𝐸⃗1 = 𝑎̂𝐸0 sin(𝑘𝑟1 − 𝜔𝑡) , 𝐸⃗2 = 𝑏̂𝐸0 sin(𝑘𝑟2 − 𝜔𝑡) ,
in cui 𝑎̂ e 𝑏̂ sono versori perpendicolari. Il campo risultante vale
𝐸⃗ = 𝐸⃗1 + 𝐸⃗2 = 𝑎̂𝐸0 sin(𝑘𝑟1 − 𝜔𝑡) + 𝑏̂𝐸0 sin(𝑘𝑟2 − 𝜔𝑡) .
Il corrispondente modulo al quadrato è pari a
𝐸 2 = 𝐸⃗ ∙ 𝐸⃗ = 𝐸12 + 𝐸22 = 𝐸02 sin2 (𝑘𝑟1 − 𝜔𝑡) + 𝐸02 sin2 (𝑘𝑟2 − 𝜔𝑡)
26
e, dunque, l’intensità media nei punti dello schermo risulta costante
𝐴 𝑇 2
𝐸02 𝐸02
𝐼 = ∫ 𝐸 (𝑃, 𝑡) 𝑑𝑡 =
+
= 𝐸02 .
𝑇 0
2
2
In definitiva, nessuna frangia di interferenza sarà visibile e sullo schermo apparirà
una luminosità uniforme, come prescrivono le Leggi di Fresnel-Arago.
(𝑐) Un quarto filtro 𝐹4 è messo di fronte al piano Σ con asse parallelo a quello di
𝐹1 . Questo quarto filtro ha semplicemente la funzione di polarizzare di nuovo e
nella medesima direzione la luce proveniente dalle due fenditure e, quindi, di
riprodurre la figura di interferenza sullo schermo Σ. Per la verità, la Legge di Malus
prevede oltre alla polarizzazione in una certa direzione, anche la riduzione
dell’intensità della radiazione in ingresso: ciò comporterà una luminosità ridotta
delle frange di interferenza.
27