Valerio Scorsipa
Dall’energia potenziale all’energia meccanica
1.1. Energia Potenziale
In uno spazio uni-bi-tridimensionale, sede di un campo di forze conservative, il lavoro delle forze del campo
quando si trasferisce una particella da un punto ad un altro è un invariante rispetto al cammino scelto.
Assegnata, perciò, una particella, ad ogni coppia ordinata di punti, (A, B) , si può associare un numero
reale, WAB , misura di tale lavoro.
Diremo “equipotenziali” due punti A e B solo se WAB = 0 . L’equipotenzialità è una relazione d’equivalenza, com’è facile verificare, su cui si fonda un concetto elegante, quello di energia potenziale.
Per una data particella posta in un punto P qualunque dello spazio sia U (P ) una funzione che associa a
quel punto P un numero reale (misurato in joule) e in modo che valga per ogni coppia di punti A , B :
U (A) − U (B) = WAB
posto ∆U = U (B) − U (A) si può anche scrivere WAB = −∆U ovvero per ogni punto A :
U (A) = U (B) + WAB
(1.1.1)
In base alla (1.1.1) la funzione U è definita a meno di una costante. Se si assegna alla funzione U , una volta
per tutte, in un punto O un valore convenzionale, allora essa è univocamente determinata in ogni punto del
campo di forze. La funzione U si chiama energia potenziale (o di posizione, o di configurazione). I punti di
un campo tridimensionale con uguale energia potenziale definiscono superficie equipotenziali. Per un campo
bidimensionale si parlerà di linee equipotenziali, per uno monodimensionale di punti equipotenziali.
V. Scorsipa 2
1.2. Il campo gravitazionale
Un laboratorio, un’aula, o una stanza sono regioni di spazio delimitate che hanno la forma di un parallelepipedo e rappresentano altrettante restrizioni del sistema punto materiale - terra.
È ovvio che in ogni punto di una stanza la forza peso P agisce su una particella di massa m nello stesso modo,
cioè la particella assume la stessa accelerazione ~g diretta verso il basso perpendicolarmente al pavimento
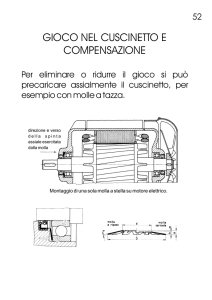
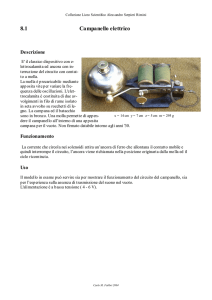
della stanza. La sezione verticale di una stanza è un rettangolo, la cui base rappresenta la linea di terra. Se
si traccia da un punto qualsiasi del rettangolo il segmento di perpendicolare alla base, ad esso corrisponde
il numero y che rappresenta la sua distanza dal pavimento. Punti aventi la stessa y sono punti ovviamente
equipotenziali. Le superficie equipotenziali sono sezioni piane del parallelepipedo parallele al pavimento.
Nello schema del rettangolo le sezioni piane sono rappresentate da corde parallele alla base. Per la conservatività del campo, scegliendo un cammino “ad hoc” fra A e B , una spezzata di tratti verticali e orizzontali (la
più semplice: un tratto orizzontale e uno verticale) si dimostra che il lavoro che le forze del campo compiono
sulla particella per trasferirla da A a B è
−mg(yB − yA ) = mg(yA − yB ).
y
yA
yB
A
B
O
fig. 1
Posto U (A) − U (B) = mg(yA − yB ) e per un punto qualsiasi O del pavimento U (O) = 0 , allora si ha
U (A) − U (O) = mgyA , dunque
U (A) = mgyA .
La funzione U (P ) = mgy si dice energia potenziale gravitazionale.
Dall’energia potenziale all’energia meccanica
1.3. Il campo elastico di una molla ideale
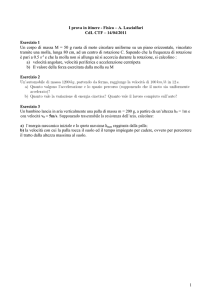
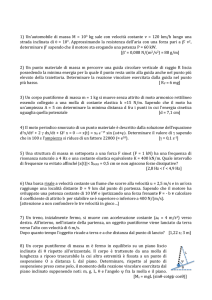
Il sistema blocco-molla (si chiama anche oscillatore armonico) deve essere disposto in modo da avere un buon
isolamento: occorre collocare il sistema su un piano “orizzontale liscio” (nello spazio interstellare, dove le
azioni gravitazionali sono poco apprezzabili, potremmo far a meno di queste accortezze).
xmin
O
x max
fig. 2
La molla ha un estremo vincolato, mentre l’altro, cui è connesso il blocco di massa m , è libero di muoversi sul
piano secondo una retta. Questa retta diviene un sistema d’ascisse stabilendo un verso positivo, scegliendo
come unità di misura il metro e ponendo l’origine O nel punto in cui si trova il blocco quando la molla è
a riposo, cioè non è soggetta a forze che l’allunghino o l’accorcino. Una molla reale, di massa trascurabile
rispetto al blocco, non deformata oltre un certo limite, risponde abbastanza bene alle condizioni ideali della
legge di Hooke, F = −kx , nello spazio monodimensionale rappresentato dall’intervallo chiuso [xmin , xmax ]
di centro O , dove xmin = −xmax .
La conservatività del campo elastico in questione (che consente di introdurre una funzione di stato del
sistema) discende dall’osservazione che durante il moto tra gli estremi −xmax , xmax ogni passaggio del
blocco per un punto è caratterizzato dalla stessa intensità della velocità v ; in altri termini dalla stessa
energia cinetica e che quindi si è conservata la sua capacità a compiere lavoro.
Motivi di evidente simmetria inducono ad affermare che per ogni x ∈ [xmin , xmax ] risulta v(−x) = −v(x) .
Se si sa calcolare il lavoro della molla quando il punto materiale si porta da A a B , o meglio, visto che
abbiamo un sistema di ascisse, da xA a xB , definiamo al solito
U (x) : U (xA ) − U (xB ) = WAB .
Se nello schema precedente, relativo al campo gravitazionale si contrappongono, in qualche modo antitetici,
i termini “alto” e “basso”, ora nello schema del sistema blocco-molla si contrappongono i termini “vicino ad
O” e “lontano da O”. Allungando (o comprimendo) una molla da 0 ad x , si compie un lavoro pari a
1
2
2 kx
(in tal caso forza e spostamento sono concordi) la molla invece compie il lavoro opposto. Quando invece la
molla è lasciata libera e da una posizione x recupera la propria configurazione di riposo, allora compie il
lavoro positivo
1
2 kx2 .
Se xV e xL sono due posizioni l’una più vicina al centro l’altra più lontana da esso si ha
WLV =
1
(xL − xV )(kxL + kxV ),
2
3
V. Scorsipa 4
lavoro che rappresenta l’area di un trapezio rettangolo di altezza xL − xV e di basi kxL e kxV , che si trova
nel piano spostamento - forza al di sotto della curva F = kx .
Con un semplice passaggio si ottiene WLV = 21 k(x2L − x2V ) .
Allora si può scrivere:
U (xL ) − U (xV ) =
1 2
1
kxL − kx2V
2
2
perciò
WV L = −∆U
e, per ogni x , posto U (O) = 0 si ha
U (x) =
1 2
kx .
2
La funzione U (x) prende il nome di energia potenziale elastica.
1.4. Conclusione
In entrambi i casi trattati, tenendo conto anche del teorema dell’energia cinetica si ha da W = ∆K ,
W = −∆U e per la transitività dell’uguaglianza: ∆K = −∆U , ovvero, indicando con gli indici i ed f
rispettivamente “iniziale” e “finale”: Kf − Ki = Ui − Uf da cui si ricava:
K i + Ui = K f + Uf .
La precedente relazione esprime un invariante, l’energia totale, o meccanica, E , del sistema e eliminando gli
indici, si può scrivere che
E = k + U = cost.