“SAPR ad ala fissa e multi rotori: dal rilievo 3D di aree
pianeggianti alle pareti rocciose”
Donato Marcantonio - [email protected]
Alex Fabbro - [email protected]
Italia – Zone altimetriche
L´Italia è divisa in 3 zone altimetriche:
– Pianura
– Collina
– Montagna
La suddivisione delle 3 zone avviene in base al
livello altimetrico.
Zone di montagne ci caratterizzano con
elevazione montuose sopra i 600 metri
(settentrione) e 700 metri (centro-meridione)
Sotto questa soglia si trova colline ed zone con
assenza di masse rilevate in altezza vengono
classificate come pianura.
Fotogrammetria - 1
L´elevata variazione geografica richiede diverse tecnologie per il rilevo del terreno.
L´attuale utilizzo di SAPR (SAPR= sistemi a pilotaggio remoto) viene combinato con il
concetto dell´aerofotogrammetria tradizione, utilizzato fino ad oggi con aerei o elicotteri.
Fotogrammetria
L´utilizzo dell´aerofotogrammetria per il rilevo del terreno comporta porta con se, come
tutte le tecnologie, alcuni vantaggi e svantaggi.
Cosa NON è possibile rilevare con l´aerofotogrammetria?
– Superfici con vegetazione densa – bosco
Fotogrammetria
Cosa NON è possibile rilevare con l´aerofotogrammetria?
– Superfici uniformi - colore e contrasti
Fotogrammetria
Cosa NON è possibile rilevare con l´aerofotogrammetria?
– Acqua
Fotogrammetria
Cosa è possibile fare con dati che sono stati rilevati con l´aerofotogrammetria?
– Nuvola di punti con assegnazione di colore ad ogni singolo punto per avere un migliore
orientamento all´interno della nuvola di punti
Fotogrammetria
Cosa è possibile fare con dati che sono stati rilevati con l´aerofotogrammetria?
– Ortofoto della zona interessata – anche ad elevata risoluzione
Fotogrammetria
Cosa è possibile fare con dati che sono stati rilevati con l´aerofotogrammetria?
– Calcolo di volumi
Fotogrammetria
Quali sono i vantaggio dell´aerofotogrammetria in confronto ad un rilevo tradizionale?
–
Il rilievo aerofotogrammetrico con SAPR e/o aeromobile NON va a sostituire un rilievo
tradizionale!!
–
L'utilizzo del SAPR in combinazione ad un rilevo tradizionale aumenta il database di informazioni
da cui poi si possono estrapolare le informazioni ed aumenta l´efficienza di lavoro durante la postelaborazione.
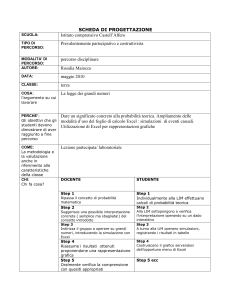
Gamma MULTIROTOR
G4 Surveying Robot
IN VOLO
Tempo di volo
Fino a 20 minuti
Velocità massima
50 km/h
Velocità di crociera
21 km/h
Stabile al vento fino a
40 km/h
Calcolo della posizione in volo
512 / sec
DIMENSIONI PESO E COSTRUZIONE
Dimensioni
85cm H 49cm
Dimensioni di trasporto
88 x 45 x 22 cm
Peso a vuoto ( senza gimbal, batteria
e fotocamera)
2.700g
Peso massimo al decollo
5.000g
Tipologia gimbal
Brushless stabilizzato su
2 assi
Gamma MULTIROTOR
G4 Surveying Robot
Gamma MULTIROTOR
G4 Eagle V2
IN VOLO
Tempo di volo
Fino a 20 minuti
Velocità massima
50 km/h
Velocità di crociera
21 km/h
Stabile al vento fino a
40 km/h
Calcolo della posizione in volo
512 / sec
DIMENSIONI PESO E COSTRUZIONE
Dimensioni
88cm H 49cm
Dimensioni di trasporto
45 x 32 x 49 cm
Peso a vuoto ( senza gimbal, batteria
e fotocamera)
3.200g
Peso massimo al decollo
6.400g
Tipologia gimbal
Brushless stabilizzato su
2 assi
Gamma MULTIROTOR
G4 Eagle V2
Gamma MULTIROTOR
G4 Recon One Surveying Edition
IN VOLO
Tempo di volo
Fino a 70 minuti
Velocità massima
50 km/h
Velocità di crociera
30 km/h
Stabile al vento fino a
36 km/h
Calcolo della posizione in volo
512 / sec
DIMENSIONI PESO E COSTRUZIONE
Dimensioni
Dimensioni di trasporto
127cm H 33cm
50 x 50 x 60 cm
Peso a vuoto ( senza gimbal, batteria
e fotocamera)
8.000g
Peso massimo al decollo
9.500g
Tipologia gimbal
Gimbal Brushless con
Sony Aplha 7S
Gamma MULTIROTOR
G4 Recon One Defence Edition
IN VOLO
Tempo di volo
Fino a 90 minuti
Velocità massima
50 km/h
Velocità di crociera
30 km/h
Stabile al vento fino a
36 km/h
Calcolo della posizione in volo
512 / sec
DIMENSIONI PESO E COSTRUZIONE
Dimensioni
Dimensioni di trasporto
127cm H 33cm
50 x 50 x 60 cm
Peso a vuoto ( senza gimbal, batteria
e fotocamera)
8.000g
Peso massimo al decollo
9.500g
Tipologia gimbal
Eyequad
Gamma MULTIROTOR
G4 Recon One
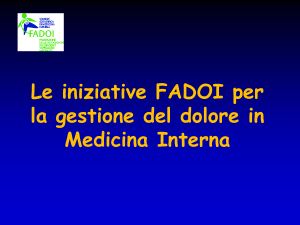
Punti in comune
Sovrapposizione
in direzione di volo
Sovrapposizione delle immagini in
direzione di volo
Sovrapposizione
laterale
Sovrapposizione laterale
delle immagini
Sovrapposizione e
profilo del terreno
Con una sovrapposizione minima del 70% in direzione di volo ogni punto in comune su
ogni foto viene raffigurata su al meno 3 foto – tenendo conto anche della sovrapposizione
laterale.
Nel caso di un rilevo non si raggiunge la sovrapposizione i dati non sono utilizzabili
Rilevo aerofotogrammetrico
Airport Salzburg (AUT)
Rilevo dei bordi della pista di
atterraggio di Salzsburg (AUT)
Lunghezza pista: 3050m
Risoluzione richiesta: 1mm/Pixel
Dati rilevo:
– Lunghezza complessiva rilevata:
6100m
–
27 voli con una durata media di
11minuti – traffico permettendo
– 15.000 foto
Rilevo aerofotogrammetrico
Airport Salzburg (AUT)
Problematica:
Frammettenti della canalina laterale
sulla pista principale.
Pericolo durante la fase di decollo e
atterraggio di aeromobili.
Rilevo aerofotogrammetrico
Airport Salzburg (AUT)
Pianificazione del volo
standard vs. UAV Planner 3D
Rilevo di una pista da
sci
Risoluzione richiesta:
20mm/Pixel
Dati rilevo:
– Dislivello: 250
metri
–
2 voli da 15 minuti
Pianificazione del volo
standard vs. UAV Planner 3D
Pianificazione con UAV Planner 3D
Pianificazione standard senza riferimento
alla quota di volo
Pianificazione del volo
standard vs. UAV Planner 3D
Pianificazione con UAV Planner 3D
Pianificazione standard senza riferimento
alla quota di volo
Pianificazione del volo
standard vs. UAV Planner 3D
Pianificazione del volo
standard vs. UAV Planner 3D
Notate delle differenze??
Pianificazione del volo
standard vs. UAV Planner 3D
Trimble UAS Portfolio
Soluzioni hardware & software
Donato Marcantonio - [email protected]
Trimble UAS Portfolio
harware & software
Trimble UX5
Ideale per
mappatura standard
Trimble ZX5
Soluzione flessibile
per mappatura e
ispezione
Trimble UX5 HP
Soluzione ideale per rilievo e
mappatura ad alta precisione
Suite
Trimble ZX5 Aerial Imaging Solution
Soluzione completa
Hardware & Software
Trimble ZX5 aerial imaging solution
Gimbal & Sensor
Flight Planning
Software
Battery Packs
Ground Control
TBC APM Software
UAS Master
Trimble ZX5 Specifiche
Peso: max 5 kg
Larghezza : 85 x 49 cm richiudibile
Tipo lancio : VTO (auto-manuale)
Velocità max: 30 km/h
Durata (tempo di volo): 20 min
Payload: 2.3 Kg
GSD: sotto al mm
Velocità vento: 36 km/h
Tipo di atterraggio: VL (auto-manuale)
Camera: Olympus E-PL7 16.1Mpx
camera
Supporta anche camere multispettrale
Jeti DS 14 radio control station >1000m
range
Live view 5.8Ghz video (optional)
– Jeti DS16 w/ 7“ Color monitor
Trimble UX5
Soluzione completa
Hardware & Software
Trimble UX5 Specifiche
Peso: 2.5 kg
Larghezza ali: 100 cm
Tipo lancio : catapulta
Velocità di crociera: 80 km/h
Durata (tempo di volo): 50 min
Altezza volo (AGL): 75-750 m
GSD: 2.0-24 cm
Limite massimo volo: 5000 m
Velocità vento: 65 km/h
Tipo di atterraggio: pancia
Camera: Sonyα5100 24 MPx (VIS – NIR)
Trimble UX5 HP Specifiche New
Peso: 2.9 kg
Larghezza ali: 100 cm
Tipo lancio : catapulta
Velocità di crociera: 80 km/h
Durata (tempo di volo): 40 min
Altezza volo (AGL): 75-750 m
GSD: 1.0 -24 cm
Limite massimo volo: 5000 m
Velocità vento: 65 km/h
Tipo di atterraggio: pancia
Camera: Sony a7R - 36 MPx (VIS – NIR)
Opzioni lenti multiple (15 mm, 25 mm, 35 mm)
Ricevitore GNSS 336 canali tripla frequenza
per applicazioni di alta precisione – elimina la
necessità dei GCP a terra usando PostProcessed Kinematic (PPK)
Trimble UX5 : componenti
Trimble UX5 Aerial Imaging
Rover & Trimble Tablet
Trimble Access Aerial Imaging
Camera
TBC APM Software
UAS Master /eCognition
Componente di lancio
Rampa
–
–
–
–
Corda elastica
Manopola
Maniglia di rilascio
Perno di sicurezza
Barra di lancio
Supporto
Benefici del sistema di lancio
Lancio efficace
–
–
–
–
–
Velocità
Angolo di lancio
Nessun rischio di spegnersi
Facile da utilizzare
Meno stress (l’utente deve controllare velocità e
angolo con lancio manuale)
Sicuro
– Sequenza di lancio costante e controllata
– Utente non esposto alle eliche
– Uniforme alle direttive 2006/42/EC
Ground Control Station
Trimble Tablet
Trimble Access
Aerial Imaging
Pianificazione volo e
controllo
Comunicazione e
controllo in tempo
reale con l’UX5
Trimble Access Aerial Imaging
Pianificazione missione
Creazione dell’immagine di sfondo o aggiunta layer
Definizione dell’area di interesse
Definizione GSD, quota volo e sovrapposizione
Pianificazione volo
Calcola e pianifica voli multipli per una missione
Definisce la direzione del vento, punto di decollo e di
atterraggio
Monitoraggio del volo
Monitoraggio in tempo reale del volo
Comando di emergenza quando necessario
Analisi
Controllo completamento dell’acquisizione dati
Definizione area rilievo
Definizione del volo
Simulazione del volo
Lista di controllo del volo
Monitoraggio del volo
Il volo è controllato da un sistema di autopilotaggio
– Basato sulla missione e la pianificazione del volo creata
con l’applicazione Trimble Access Aerial Imaging
Visualizzazione parametri di volo e performance
– Orizzonte virtuale
– Numero satelliti GPS
– Livello batteria
– Altezza e velocità (Pianificata e reale)
– Posizione reale e strisciate (su mappe)
Modifica di salvataggio (se necessario)
Conferma di atterraggio
Monitoraggio volo
Manovre di salvataggio
Atterraggio
–
Vola verso
–
Interrompe immeditamente il volo e si muove a spirale verso
terra
Up (non mostrata)
–
–
Vola a 300 m verso destra e gira intorno la posizione raggiunta
FTS (Flight Termination System)
–
Vola verso la posizione del pilota: atterraggio o gira intorno
Destra
–
Gira intorno la posizione seguente
Qui
–
Vola verso una posizione indicata e gira intorno
Hold
–
Ordina al veivolo di atterrare prima che il persorso sia stato
completato
Incrementa la quota di volo di 10 m
Disponibile quando una manovra precedente è stata già
avviata
Down (non mostrata)
–
–
Decrementa la quota di volo di 10 m
Disponibile quando una manovra precedente è stata già
avviata
Trimble UX5 Aerial Imaging Rover
Airframe
–
–
–
–
Telaio interno in carbonio
Corpo in polipropilene espanso
Motore ed elica
Elevoni servo controllati
Compartimento carico
– Batteria
– Camera
– Luce di tracciamento
eBox
– GPS e sensori di orientamento
– 2.4 GHz radio
– Autopilota
UX5 eBox
Antenna GPS
Tasto di accensione &
LED di stato
Tubo di Pitot
Antenna radio
Porta di scarico dati
UX5 gBox (solo UX5 Hp)
Cattura localizzazione immagini durante il
volo con grande precisione
Usa PPK con base a terra per eliminare
GCP
Procedura ottimale per mappatura aree
dove non è possibile accedere
UX5 dispositivo di inseguimento segnale
Per recuperare
veicolo perso
433 MHz approvato
per uso in Europe,
Africa, Russia,
Australia
Per nord America ae
Brasile non sono
ancora disponibili
GeoMap Win Flight Planning SW
Pianificazione e controllo
volo
– Funziona su PC o Tablet
Configurazione parametri
volo
Scarico dati pianificazione
via USB –ZX5
Preparazione dati per
elaborazione in office
software
Office software
Trimble Business Center – Photogrammetry module
Donato Marcantonio
[email protected]
Cos’ è Trimble Business Center
Software per elaborazione dati:
GNSS
Stazioni totali
Livelli digitali
Fotogrammetria
Cos’ è Trimble Business Center
Software per elaborazione dati:
Dati laser scanner
Mobile mapping
Esportazione KML
Integrazione dati: es. V10-GNSS-UX5
Quando un rilievo da APR non è sufficiente……
TBC Aerial Photogrammetry module
Ambiente di lavoro in italiano TBC
Modulo sviluppato sulla base di
Inpho
Curve di livello, nuvole di punti,
modelli 3D, ortofoto ecc.
Integrazione con dati provenienti da
altri sensori
Semplice flusso di lavoro per
importare dati di volo, immagini,
punti di appoggio e per la creazione
di elaborati
Visualizzazione volo
Misura GCP
Visualizzazione relazioni tra GCP
Creazione prodotti finali
Creazione ortomosaici
Creazione Digital Surface Models
Crezione nuvole di punti
Creazione superfici
Creazioni curve di livello
Ottico e VIR
Office software
Inpho UAS Master
Donato Marcantonio
[email protected]
Inpho UAS Master
1-Click or Multi-Stop Process
1-CLICK, full
automation
Project
Setup
Orientation
Calibration
PointCloud
OrthoMosaic
Orthomosaic
Colorized
Point cloud
Colorized
DTM/DSM
Project Setup
Georeferencing
Area Definition
GCP Measurement
Adding Tie Points
Optional Calibrations
Point Cloud
Generation
Area Definition
Parameters
DTM/DSM
Filtering, Editing...
Stereoscopic
OrthoGeneration
Area Definition
True / Standard Ortho
Ortho Editing
Mapping...
GIS Ready
Vector Map
Processo completo per la mosaicatura one
click o processo interattivo in 6 Steps
1 click
fully automated „black-box“
Automated
Project Setup
Delivery
Delivery
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Controllo ed
editing
Step
5
Automatic Point cloud
generation
Controllo ed
editing
Step
6
Automatic orthomosaic
generation
Controllo ed
editing
Controllo ed
editing
Guida flusso di lavoro
Step
1
1Click
Step
2
Step
3
Step
4
Step
5
Step
6
Step 1:
anteprima strisciate dopo Project Setup
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Delivery
Step 2: misura GCP
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Delivery
Selezione del CGP dal menu e apertura dalle
finestre di misura
Step 2: GCP Measurement
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Delivery
GCP sono preposizionati
Automatic Point Transfer
Funzione di misura in un
click semi - automatica
Step 3: estrazione automatica Tie Points
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Delivery
Checks
and edits
Step 4: orientamento e calibrazione
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Delivery
Controllo
ed editing
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Delivery
Controllo
ed editings
Visualizzazione 3d
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Delivery
Controllo
ed editing
Step 5: Creazione nuvola di punti
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Delivery
Controllo
ed editing
Editing parziale
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Delivery
Controllo
ed editing
Re-interpolate
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Delivery
Controllo
ed editing
Step 6: DSM /STM, Ortofoto e digitalizzazione
– Controllo dati manuale:
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Linee /poligoni
Point-offset / stereo-parallasse
Correzione altezza con visione stereo
– Strumenti automatici
Correlazione /interpolazione
terreno per misure 3D
– Tool fotogrammetrici
specifici per UAV
Controllo
ed editing
Controllo
ed editing
Delivery
Trimble Inpho v6.0
Output
Step
1
Automated Project
Setup
Step
2
Semi-automated GCP
Measurement
Step
3
Automatic tie point
extraction (stitching)
Step
4
Orientation computation
/ calibration
Step
5
Automatic Point cloud
generation
Step
6
Automatic orthomosaic
generation
Delivery
Formati di uscita
Jpeg2000
LAS 1.4
LasZip
EXIF-Reader
Perchè UASMaster
•Nuvole di punti, DSM /DTM e ortofoto ad elevata
precisione grazie a potenti algoritmi di Blundle Adjustment
- Matching e stumenti di editing/estrazione delle TRUE
Ortofoto (estrazioni vettoriali edifici)
•Full stereo visualization per un più accurato editing e
mappatura
•Step By step
•Tecnologia INPHO in un tool studiato per UAS data
eCognition
Software per classificazione automatica
eCognition Products
Essentials
Out-of-the-box Application
Suite
Developing & Analysis Platform
eCognition
Tree Map
(Vector)
Create GISready Layers
Impervious Map
(Vector)
Land Cover Map
(Vector)
Elevation Data
(Raster)
Automated
Interpretation
Image Data
(Raster)
Manual
Interpretation
Real World
Trimble – Al-to drones
Soluzioni hardware & software adatte ad ogni tipo di esigenza
Inclusa formazione piloti
Suite
Grazie per la vostra
attenzione !
Donato Marcantonio
Alex Fabbro
Al-To drones srl
Spektra Srl
Via Dei Portici 27
a Trimble Company
39100 Bolzano
Product Specialist - Geospatial Division
[email protected]
Mob.(+39) 344 0680303
E-mail : [email protected]
E-mail: [email protected]