LE DEFORMAZIONI
LA LEZIONE
Il modulo di Young
Oggi lo studio delle proprietà meccaniche dei materiali è realizzato attraverso diverse
tipologie di prove. Applicando a un provino coppie di forze d’intensità nota si misurano
le deformazioni dovute a sforzi di trazione, compressione, taglio e torsione.
Fig.1 Schematizzazione della trazione e della
compressione di un materiale
Fig.2 Schematizzazione della deformazione di taglio di
un materiale;
Fig.3 Un materiale cilindrico sottoposto a torsione
Limitandoci per ora alla sola trazione immaginiamo un cilindro di acciaio, avente sezione di
area uguale ad A0, contrassegnato con due linee distanti l0. Se due forze opposte,
entrambe di modulo F, sono applicate perpendicolarmente alle estremità circolari del
cilindro la sua lunghezza diviene l e si modifica leggermente anche l’area. Per piccoli valori
di F, la variazione l-l0=Δl della lunghezza è proporzionale all’intensità della forza.
Rimuovendo allora le forze esterne, il provino ritorna alle condizioni iniziali (come se si
trattasse di una molla). Siamo nella fase elastica in cui vale la legge di Hooke: F=kΔl.
Continuando la trazione, da un certo valore, la forza non è più legata all’allungamento da
una relazione così semplice. Il provino, eliminando la trazione, non ritorna più alla
situazione di partenza: si ha una deformazione permanente del cilindro. Ancora però
carico e lunghezza crescono entrambe, ma non linearmente. Si ha una deformazione di
tipo plastico. Aumentando ulteriormente l’intensità, gli effetti non sono più omogenei, ma
si localizzano in una zona centrale che macroscopicamente presenta una sezione diversa
rispetto al resto del provino (strizione). Siamo vicini alla rottura del cilindro che avviene
con la separazione in due parti.
Fig.4 Macchina utilizzata per le prove di trazione;
Fig.5 Strizione del campione
Ritornando alla fase elastica, è facile convincersi che raddoppiando la lunghezza
iniziale del campione e pensandolo composto da due cilindri ciascuno di lunghezza l0,
l’allungamento complessivo sia ora 2Δl. Diviene così naturale per caratterizzare il
materiale non misurare l’allungamento assoluto, ma quello relativo: Δl/l0, chiamato
deformazione di trazione. Modificando invece l’area della sezione del provino, la
resistenza del materiale aumenta al crescere di A0 (risultato raggiunto nel Settecento
da ingegneri, come Coulomb, che studiarono la resistenza delle travi sottoposte a
carichi). La grandezza fisica caratteristica dell’esperienza è allora lo sforzo di trazione,
il rapporto F/A0, che ha la stessa unità di misura della pressione: il pascal. Poiché i
valori in gioco, rispetto all’unità del Sistema Internazionale, sono molto più grandi, si
utilizzano i multipli: megapascal (1 MPa= 106 Pa) e gigapascal (1 GPa= 109 Pa). Nella
deformazione elastica lo sforzo è direttamente proporzionale alla deformazione. La
costante di proporzionalità, chiamata modulo di Young, in genere, è indicata con il
simbolo E. La legge di Hooke diviene allora:
F/A0 = E Δl/l0.
La forza per unità di superficie è lo sforzo (o tensione) σ (storicamente Cauchy parlava
di pressione), mentre l’allungamento relativo o deformazione, adimensionale, è
rappresentato con il simbolo: ε. Dalle considerazioni precedenti segue che la legge di
Hooke per la trazione è:
σ = E ε.
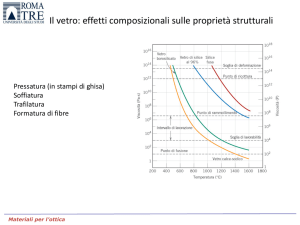
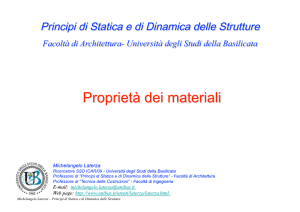
I moduli di Young, aventi le stesse unità degli sforzi e quindi della pressione, per
alcuni materiali utilizzati nelle costruzioni sono riportati nella tabella che segue. Nei
metalli i valori di E variano da qualche GPa a diverse centinaia di GPa; mentre se si
prendono in considerazione i polimeri, i valori scendono da circa dieci MPa fino a
qualche GPa. Per passare dall’unità del Sistema Internazionale a quella della tabella di
figura 6 (newton al millimetro quadrato) si tenga presente che quest’ultima equivale a
1 MPa.
Fig.6 Tabella modulo Young di materiali
da costruzione
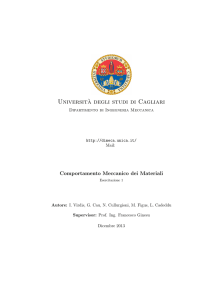
La curva deformazione-sforzo, per alcuni materiali sottoposti alla prova di trazione, è
riportata nella figura 7. Solo nella prima fase, dove l’andamento è lineare, si ha la
validità della legge di Hooke. L’estremo superiore M del grafico è il valore massimo
della fase plastica.
Fig.7 Curva sforzo deformazione e variazioni di forma del provino
Il reticolo cristallino
Un solido ideale è, dal punto di vista microscopico, un reticolo cristallino con gli atomi
che occupano i vertici del reticolo e interagiscono tra di loro grazie a forze elettriche.
Immaginiamo una fila di atomi equidistanti disposti secondo l’asse x. Il reticolo
unidirezionale può essere pensato come tante particelle collegate da forze elastiche
descritte da una legge del tipo F=-k x. Per piccoli spostamenti dalla posizione di
equilibrio, ad esempio l’avvicinamento di due particelle del reticolo, vengono generate
forze repulsive che le riportano alle condizioni iniziali, mentre se si allontanano due
“primi vicini” la forza di richiamo risulta attrattiva. L’immagine microscopica
unidirezionale perciò riflette allora ancora una volta la visione macroscopica della
legge di Hooke.
In più dimensioni gli effetti dipendono dalla simmetria del reticolo e non basta più una
sola costante per descrivere le piccole deformazioni reversibili del solido. Per un
reticolo caratterizzato da una cella elementare cubica si possono pensare tre
interazioni indipendenti, agenti lungo gli assi del cubo. Servono allora tre moduli
elastici per descrivere le proprietà del solido.
Fig.8 Struttura cubica del reticolo dell’oro;
Fig.9 Struttura cristallina del ghiaccio
Se il sistema forma una cella elementare più complessa del cubo, non è facile dare
un’immagine intuitiva equivalente e ci limiteremo a elencare la crescita del numero
delle costanti. Se la simmetria è esagonale come accade nei cristalli di ghiaccio (la
cella elementare è un prisma retto con base esagonale) le costanti di elasticità
salgono a cinque; per materiali cristallini del sistema rombico (prisma retto a base
rettangolare) come il topazio bisogna dare nove valori indipendenti; tredici per il
sistema monoclino (un prisma obliquo a base rettangolare). In altre parole maggiore è
la simmetria, minore è il numero delle costanti elastiche.
Consideriamo ora, dal punto di vista microscopico, la deformazione plastica in un
cristallo. Se il reticolo fosse composto da una serie di piani perfettamente allineati
simile alle pagine di un libro sarebbe difficile spiegare uno dei meccanismi della
deformazione permanente. Consideriamo un’imperfezione, una specie di segnalibro
posto tra due pagine di un libro, avremo allora una situazione come quella illustrata
nella figura 10.
Al centro del reticolo risulta una sorta di regione vuota. Forze relativamente piccole
possono allora provocare lo spostamento di file di atomi che occupano altre posizioni.
L’imperfezione lineare del cristallo è chiamata dislocazione e si potrebbe descrivere il
fenomeno come lo spostamento della dislocazione verso il bordo con una piccola
deformazione permanente del cristallo.
I metalli hanno la caratteristica di duttilità, legata alle dislocazioni e al loro numero,
cioè mostrano la capacità di far scorrere gli strati di atomi l’uno sull’altro senza subire
fratture (su piani che spesso si trovano a 45 ° rispetto allo sforzo), senza dovere
rompere tutta una serie di legami atomici come sarebbe successo se il reticolo fosse
stato perfetto. Le dislocazioni permettono inoltre la crescita dei cristalli.
Fig.10 Esempio di dislocazione; Fig.11 Modello bidimensionale di reticolo cristallino (A) e configurazioni assunte in seguito a
deformazione elastica (B) e plastica ©
Sforzi e deformazioni generalizzati
La teoria moderna dell’elasticità nacque nell’Ottocento, senza alcun riferimento iniziale
alle proprietà molecolari del solido, per opera di scienziati formati all’Ecole
Polytechnique di Parigi. L’ingegneria unita alla matematica superiore è ancor oggi un
tratto distintivo della teoria elastica del solido e nella prima metà dell’Ottocento le due
tendenze furono riunificate. Nel secolo precedente invece, la teoria euleriana della
curva elastica (nella quale la meccanica e la matematica descrivevano un segmento
ideale privo di dimensioni sottoposto a forze esterne alle sue estremità) e gli studi alla
Varignon (sulle tensioni di una trave) non avevano molti punti di contatto.
Augustin-Louis Cauchy, pur non parlando di sforzo, fu il principale artefice della
generalizzazione della legge di Hooke. Cauchy suppose che in corpo elastico la
pressione interna non fosse, a differenza dell’idrostatica, più necessariamente normale
al piano. In tal modo l’idea di ‘sforzo’ (o meglio, tensione) entrò nella teoria
dell’elasticità.
Per capire la questione dobbiamo considerare la deformazione di taglio in una forma
analoga a quella presentata nella maggioranza dei manuali sulla resistenza dei
materiali e in alcuni volumi di fisica. Invece della barra cilindrica consideriamo ora un
corpo a sezione rettangolare sottoposto a una coppia di forze per unità di superficie τ,
tangenziali all’area stessa come già rappresentato in figura 2. Il rettangolo di figura 12
subisce allora una deformazione misurabile in prima approssimazione come rapporto
Δx/l pari all’angolo γ. La grandezza τ è, in analogia alla trattazione della prova di
trazione, chiamata sforzo di taglio puro. Nel limite elastico, la deformazione coincide
con l’angolo γ e la legge di Hooke si esprime con la proporzionalità tra τ e γ. La
costante elastica di taglio è indicata solitamente con la lettera G, da cui si ricava:
τ =G γ.
Ancora G ha la stessa unità di misura del modulo di Young e dello sforzo, equivalente
a quella di una pressione. Si può dimostrare che il taglio puro è riconducibile a una
trazione e una compressione perpendicolare alla trazione.
Fig.12 Deformazione di taglio, nella
figura il rapporto Δx/L è
approssimabile all’angolo γ. Inoltre
si cerca di indicare come lo sforzo di
taglio si possa ottenere da una
trazione e una compressione agenti
perpendicolarmente tra di loro.;
Fig.13 Volumetto ideale all’interno
del solido elastico e forze
generalizzate su unità di superficie
che agiscono sulle facce del cubo
Passiamo adesso ad affrontare la legge di Hooke generalizzata. Un piccolo volume
interno al solido elastico sottoposto a forze esterne risente di tensioni. Su ogni faccia
del cubo ideale (il punto di Euler) agiscono tre sforzi: due tangenziali e uno normale.
Poiché su facce opposte gli sforzi hanno la stessa intensità, per descrivere lo stato
ideale di tensione servono nove valori (tre normali e sei tangenziali). In realtà
all’equilibrio anche le componenti tangenziali possono ridursi a tre. In un solido in cui
gli effetti non dipendono dalle direzioni a ogni sforzo normale σ corrisponde una
singola deformazione ε mentre a ciascun sforzo tangenziale τ la deformazione γ. Però
in un solido anisotropo non è detto che un’azione di trazione comporti una semplice
deformazione in una direzione. In genere una causa esterna comporta una
combinazione lineare di effetti di deformazione longitudinali e di taglio. Dal punto di
vista algebrico ognuna delle sei componenti dello sforzo generalizzato è legata alle sei
componenti della deformazione generalizzata con sei moduli. Le costanti elastiche di
un solido generico sono allora trentasei (una matrice 6x6). Cauchy fu il primo a capire
che per un solido omogeneo e isotropo le 36 costanti si riducono a 2.
Il solido isotropo
Ritorniamo alla nostra iniziale barra sottoposta a trazione, già nella figura 1 era chiaro
che allungamento del materiale lungo F corrispondeva a un restringimento nelle altre
direzioni, come se ci fosse una compressione. Sostituiamo (vedi
figura 14) ora alla superficie circolare un rettangolo, utilizzando
una barra a forma di parallelepipedo avente lati lx, ly, lz.
Se il materiale è omogeneo e isotropo gli effetti lungo l’asse x e
l’asse y saranno uguali: Δx/lx = Δy/ly. Inoltre la contrazione sarà
proporzionale all’allungamento relativo Δz/lz. Il blocco viene stirato
nella direzione z e si accorcia nelle direzioni x e y. Per cui si può
scrivere: Δx/lx = Δy/ly = -ν Δz/lz. Il numero ν, positivo,
caratteristico del materiale è chiamato coefficiente di Poisson.
Fig.14 Barra a forma di parallelepipedo
Fig.15 Tabella del coefficiente di Poisson di
alcuni materiali
Come si vede dalla tabella il coefficiente di Poisson adimensionale è sempre molto
piccolo, si può dimostrare che il suo valore è sempre minore di ½ ipotizzando che il
modulo di Young E sia positivo.
La legge di Hooke, ricordando che nella prova di trazione F/A = σ = E Δz/lz, per le tre
deformazioni diventa allora:
Δx/lx = -νσ/E, Δy/ly = -νσ/E, Δz/lz = σ/E.
Per esprimere la “proporzionalità” tra sforzi e deformazioni abbiamo bisogno allora di
due valori numerici.
Un’alternativa alla trattazione del solido isotropo sottoposto a forze è quella di uno
studio legato all’energia. In questo caso al posto del coefficiente di Poisson e del
modulo di Young si utilizzano altre due termini: λ (primo coefficiente di Lamè) e G
(costante elastica di taglio). Ancora ricordiamo che E e G hanno la stessa unità di
misura (pascal), mentre i coefficienti ne sono privi. Le coppie alternative di valori si
possono ovviamente collegare con semplici relazioni algebriche. In particolare si può
dimostrare, sempre uguagliando il taglio a una compressione e una trazione, che
G=E/2(1 + ν).