Trasduttori
Argomenti:
Discussione di alcune tipologie di trasduttori:
spostamento;
accelerazione;
deformazione;
pressione;
forza;
…
1
Generalità
L’interesse del presente capitolo è rivolto alle caratteristiche generali di
alcuni strumenti largamente impiegati nell’ambito sperimentale.
L’analisi verrà condotta per tipologia di grandezza fisica investigata: non
ci sono né la necessità né la possibilità di esaminare tutti i possibili
trasduttori disponibili al giorno d’oggi.
Trasduttori tipici per misure strutturali sono:
potenziometri, LVDT, encoder;
estensimetri elettrici;
celle di carico;
accelerometri.
Di alcuni verranno meglio approfonditi i dettagli di funzionamento ma di
fondamentale importanza resta la comprensione dei criteri generali per la
selezione e l’utilizzo di un generico strumento atto ad una specifica
applicazione.
2
1
Misure di spostamento
3
Misure di spostamento
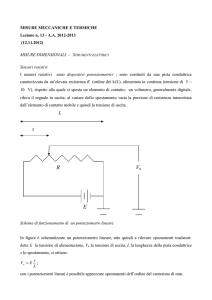
Gli strumenti utilizzati per le misure di spostamento o posizione si
possono dividere in due macro classi.
A contatto (misura di movimento relativo tra due parti del
sensore, di cui una è resa solidale con l’oggetto della misura).
Es. Potenziometri lineari e angolari, LVDT, RVDT.
Non a contatto (misura del movimento relativo tra il sensore e
l’oggetto della misura).
Es. Trasduttori capacitivi, magnetici, laser, ultrasuoni.
4
2
Potenziometro
5
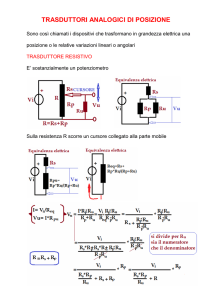
Potenziometro
Abbiamo precedentemente visto che il potenziometro è un trasduttore di
movimento basato sulla variazione di resistenza dovuta al movimento di
un cursore mobile.
Più pratico effettuare misure di tensione utilizzando il potenziometro come
partitore di una tensione di alimentazione applicata agli estremi
i = VS / RL
i0 = 0
Rx x
=
RL L
Eq. di funzionamento
R
1
VO = Rx i = x VS = VS ⋅ x
RL
L
Eq. di misura
Funz. di trasferimento
Eq. di partizione
L
x=
VS
VO
VO VS
=
x
L
Comportamento ideale perfettamente lineare: tensione nulla ad un
estremo (x=0) e di alimentazione, VS, all’estremo opposto (x=L).
6
3
Potenziometro
Equazione di misura:
x=
L
VO =S PotVO
VS
LINEARE
W
α = VO
V
S
ANGOLARE
W
L
i m =0
α
Allineamento dello zero-strumento con lo zero-spostamento è
praticamente impossibile: ricorso a misure differenziali
Uscita solo positiva, quindi per spostamenti bidirezionali necessario
definire un riferimento per misure differenziali
Il modello presentato è tipico dello strumento ideale ma ci possono
essere comportamenti difformi dovuti alla realizzazione.
7
Potenziometro
Esistono vari tipi di potenziometri in commercio che differiscono
sostanzialmente per la corsa che possono effettuare.
Lineari
Angolari
8
4
Potenziometro
Come già noto uno strumento reale ha un comportamento che, in
generale, si discosta da quello rappresentato dal modello.
E’ necessario sapere se vi sono ipotesi adottate nel modello, e quali
sono, che nel caso reale vengono a cadere. La loro conoscenza e la
sensibilità dello strumento a queste scostamenti dall’idealità forniscono
informazioni utili per valutare la qualità della misura che stiamo
effettuando.
Alcune discrepanze tra il caso reale e quello ideale, tipiche di un
potenziometro sono:
nel risolvere l’equazione del circuito elettrico abbiamo ipotizzato
assorbimento nullo in uscita;
il cursore ha un movimento limitato da una qualche forma di
finecorsa meccanico che deve essere regolato;
la proporzionalità tra ingresso ed uscita potrebbe differire, magari
anche solo localmente, dalla costante determinata semplicemente a
partire dai valori globali di RL e L.
9
Potenziometro
Potenziometro
ideale
Potenziometro
reale
V
VO = S
L
x
V
VO ≅ S x
L
Cursore
im ≠ 0
RM
Con un misuratore reale della tensione in uscita dal potenziometro, V0,
avente impedenza di ingresso finita R M , l’assunzione di assorbimento
nullo, i0=0, cessa di valere: il bilancio delle correnti nel circuito si modifica
e la tensione misurata cambia.
Questa intrusività del voltmetro prende il nome di effetto di carico e per
minimizzarlo è necessaria una elevata impedenza (RM) dello strumento di
misura della tensione.
In genere comunque i voltmetri sono realizzati con impedenza di ingresso
abbastanza alta da scongiurare questa possibilità di interferenza con la
misura
10
5
Misure di spostamento: potenziometro
Per il potenziometro ideale la tensione in uscita varia linearmente con la
posizione.
Ideale
V
VO = S
L
VS
x
Misurata
VS
Cursore
Rx
0
L
0
0
L
L Pot
LR e s
Nella realtà la linearità può non essere garantita agli estremi a causa della
regolazione dei finecorsa meccanici e quindi la pendenza è corretta solo
nella zona centrale.
Lo zero meccanico potrebbe inoltre non coincidere con lo zero elettrico:
la tensione può quindi non arrivare a 0 o a VS alle estremità se i
finecorsa intervengono troppo presto;
La tensione raggiunge i valori 0 e VS dentro l’intervallo di misura e non
cambia più se i fine corsa entrano in azione tardi.
11
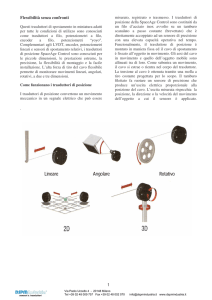
Potenziometro
Esistono sostanzialmente due tipologie realizzative della resistenza
elettrica variabile all’interno di un potenziometro:
Filo a spirale (aumenta la
resistenza riducendo i problemi di
potenza)
Risoluzione finita (numero di spire)
A strato resistivo
Risoluzione infinita (virtualmente)
12
6
Potenziometro
E’ possibile eseguire misure lineari per grandi e grandissimi
spostamenti con un potenziometri angolari che hanno dimensioni
contenute: potenziometro a filo (wire potentiometer).
Il filo :
• collega il sensore e l’oggetto di misura nella direzione del movimento;
• disaccoppia il movimento nella direzione perpendicolare al filo (ma
richiede un corretto allineamento).
13
Potenziometro
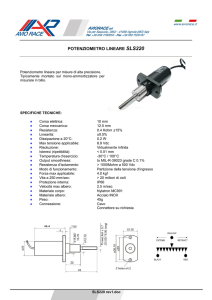
Potenziometro lineare.
VALORI TIPICI
Portata
Risoluzione
Linearità
Resistenza
Vita a fatica
Velocità massima
Lineare
2 ÷ 2000 mm
infinita ? (a strato)
0,1% ÷ 1% f.s. (a spire)
± 0,1% ÷ 0,3%
5 ÷ 10 kΩ
10 8 cicli
1 m/s
Angolare
1 ÷ 60 giro/i
infinita ? (a strato)
0,05% ÷ 1% f.s. (a spire)
± 0,1% ÷ 0,5%
5 ÷ 20 kΩ
108 cicli
3000 °/s
Potenziometro a filo.
LIMITI
Campo di utilizzo
Tensione cavo
Vel. max
Acc. Max
Dispositivi normali
2m
2 ÷ 10 N
< 10 m/s
<35 g estrazione
<25 g avvolgimento
Dispositivi speciali
20 m
50 N
25 m/s
50 g
14
7
Misure di spostamento: potenziometro
Facciamo il modello generalizzato del potenziometro …
15
L(R)VDT
19
8
LVDT
Il trasformatore differenziale lineare o LVDT (Linear Variable Differential
Transformer) e DC-LVDT (Direct Current LVDT) è uno strumento che
serve a misurare lo spostamento lineare.
Lo strumento è composto da un circuito primario e due circuiti secondari
simmetrici.
All’interno è alloggiato un equipaggio mobile in materiale ferromagnetico.
L’avvolgimento primario è alimentato in AC (1-10 kHz, 0.5-10 V).
Il flusso magnetico prodotto si accoppia attraverso l’equipaggio mobile
con gli avvolgimenti secondari: la mutua induttanza tra i circuiti esterni
dipende dalla posizione del nucleo.
20
LVDT
L’effetto della mutua induttanza è simmetrico grazie al disegno delle
bobine.
In una rete elettrica un collegamento in serie di due rami realizza la
somma delle differenze di potenziale elettrico.
Un collegamento in serie in opposizione (collego + con -) azzera l’effetto
quando il cursore è al centro: E1 –E2
Quando l’equipaggio mobile viene spostato dalla posizione centrale la
differenza delle tensioni indotte è proporzionale al suo spostamento.
21
9
LVDT
Ricordando che il circuito primario è alimentato
con una tensione alternata, ovvero sinusoidale:
ne consegue che l’uscita del sensore è una
sinusoide modulata in ampiezza.
Per ricavare l’informazione sullo spostamento in
uscita si può misurare l’inviluppo dell’ampiezza
del segnale modulato.
Così facendo si perde però l’informazione sul
verso di movimento dell’equipaggio mobile e
quindi sullo spostamento effettivo.
E’ necessario riuscire a cambiare il segno
dell’inviluppo quando l’equipaggio mobile si
muove in direzione negativa.
Lo strumento funziona grazie ad un circuito
interno di condizionamento dei segnali
22
LVDT
Schema di un sistema di misura con LVDT:
Necessario disegno accurato geometria circuiti per garantire la
linearità.
Circuito
Primario
Ampiezza uscita AC
differenziale
Circuiti
Secondari
-100
% del range
100
Posizione del nucleo
23
10
LVDT
Esternamente un trasformatore differenziale ha un aspetto del tutto
simile ad un potenziometro, sia fisicamente che in termini di cavi per
alimetazione e misura.
LVDT
RVDT
Vantaggi di un LVDT:
robustezza meccanica e ambientale;
basso attrito, quindi alta sensibilità e risoluzione;
vita a fatica virtualmente infinita (con adeguata manutenzione);
sensibilità incrociata praticamente nulla;
misura assoluta: un punto del campo ha uscita certamente nulla
(non agevole l’allineamento dello zero, possibile dover
ricorrere a una misura differenziale)
ripetibilità dello zero.
25
RVDT
L’RVDT (Rotary Variable Differential Transformer) è uno strumento che
serve a misurare lo spostamento angolare.
Basato sullo stesso principio degli LVDT ma con geometria più
complessa.
Campo di linearità limitato a 30°-40° (0.5%FSO).
Riducendo la portata si aumenta la linearità (5° 0.1%FSO).
26
11
LVDT/RVDT
LVDT
Portata:
Sensibilità:
Linearità (FS):
sonda a molla
sonda libera
(tipo ac - ac ):
(tipo dc -dc ):
± 2,5 ÷ 7,5 mm
± 1,25 ÷ 250 mm
3 ÷ 250 mV/V/mm
0,04 ÷ 8 V/mm
< ± 0,25%
RVDT
Portata:
Sensibilità
± (30°÷ 40°)
(tipo ac - ac ): 2 ÷ 3 mV/V°
(tipo dc - dc ): 125 mV/°
Linearità (FS): < ± 0,3%
27
Misure di spostamento: LVDT
Facciamo il modello generalizzato dell’LVDT
28
12
Trasduttori capacitivi
31
Trasduttori capacitivi
Trasduttori capacitivi: rilevano la capacità di un condensatore a seguito
del movimento relativo delle armature. Possono essere impiegati sia per
la trasduzione dello spostamento che della grandezza che lo determina
(es. pressione).
C = capacità [pF]
A K = costante dielettrica dell’aria [pF/m]
C = Kε
ε = costante diel. materiale frapposto [pF/m]
d A = area delle armature
d = distanza tra le armature
Per misurare lo spostamento relativo tra il sensore e l’oggetto si utilizza
quest’ultimo come seconda armatura del capacitore.
Le due armature sono quindi posizionate una sul corpo mobile e una a
terra.
L’accoppiamento è solo elettrico e non meccanico e non si ha contatto tra
lo strumento e l’oggetto da misurare.
Affinché l’accoppiamento elettrico funzioni il trasduttore e il componente
devono avere la terra in comune.
32
13
Trasduttori capacitivi
Nei trasduttori capacitivi per misure di spostamento un elettrodo è solidale
con l’oggetto di cui è misurato lo spostamento mentre l’altro è fisso.
La capacità del dielettrico tra i due elettrodi può essere fatta variare
secondo due modalità:
modifica della distanza tra gli elettrodi;
modifica dell’area affacciata.
x
x
α
Il dielettrico può non far parte dello strumento (es. liquido di un serbatoio).
34
Trasduttori capacitivi
Deviazioni dal comportamento ideale, tipiche di un trasduttore capacitivo
di spostamento, sono dovute agli effetti di bordo:
In queste zone le linee di
campo magnetico sono a
densità variabile: si produce un
comportamento non lineare
con la distanza.
Schermatura
Alimentazione
Schermatura
alimentazione
L’omogeneizzazione delle
linee di campo nella zona di
misura è possibile grazie
all’impiego di opportune
schermature; ciò porta alla
partizione dell’elettrodo ed alla
riduzione della superficie di
misura.
35
14
Trasduttori capacitivi
Esistono vari tipi di traduttori capacitivi di spostamento in commercio:
Lineari
Angolari
36
Trasduttori capacitivi
Vantaggi:
elevata sensibilità e stabilità;
poco sensibili alle variazioni di temperatura;
Svantaggi:
Campi di misura ridotti per ottenere un comportamento lineare;
sensibili alle variazioni di capacità del cavo;
sensibili alle variazioni delle caratteristiche del dielettrico (acqua, olio,
aria);
elevata impedenza.
VALORI TIPICI:
Portata: 0.05 ÷ 10 mm
Sensibilità: 1 ÷ 200 V/mm
Risoluzione: 0.02 % FS
Linearità: > ± 0.2 % FS
37
15
Misure di accelerazione
39
Accelerometri
I sensori atti a misurare le accelerazioni sono detti accelerometri.
Essi misurano o una sola componente di accelerazione lineare
(monoassiali) o tutte e tre le componenti (triassiali).
All’atto pratico quest’ultima tipologia di sensore può essere schematizzata
come tre accelerometri monoassiali montati secondo assi mutualmente
ortogonali: possibile la presenza di una sensibilità incrociata
Gli accelerometri angolari sono praticamente inutilizzati.
In funzione delle modalità realizzative quattro famiglie
possono essere individuate:
accelerometri piezoelettrici;
accelerometri piezoresistivi (MEMS);
accelerometri capacitivi;
servo accelerometri.
40
16
Accelerometri: piezoelettrici
Gli accelerometri piezoelettrici sfruttano la proprietà dei materiali piezo di
generare una carica elettrica quando sono sottoposti ad una forza
variabile nel tempo.
L’accelerazione del corpo investigato si trasferisce all’accelerometro che è
collegato solidale ad esso.
La massa sismica all’interno del sensore è soggetta ad una forza d’inerzia
che comprime il materiale piezo facendogli generare carica elettrica.
Gli accelerometri piezoelettrici non sono in grado di rilevare le componenti
statiche dell’accelerazione come la gravità
41
Accelerometri: piezoelettrici
q = K p f = K p ma
VO = K q q = K q K p ma = S v a
q: carica, f: forza , Kp: cost. piezoelettrica (coeff. piezo e dimensioni),
Kq: guadagno carica-tensione q-V, Sv: sensibilità accelerometro.
La tensione in uscita è direttamente proporzionale alla forza d’inerzia
applicata al piezo e quindi all’accelerazione, nota la massa sismica.
Esistono due modalità di realizzazione: una basata sulla compressione del
cristallo piezoelettrico e un’altra che sfrutta le forze di taglio.
F ⇒ σ3
Compressione: costante piezo 33
F ⇒ τ 13
Taglio: costante piezo 51
42
17
Accelerometri: piezoresistivi
Gli accelerometri piezoresistivi sfruttano l’abilità di questa classe di
materiali di cambiare la propria resistività elettrica quando sono soggetti
ad una pressione.
Analogamente ai piezoelettrici la forza viene applicata grazie ad una
massa sismica che per effetto dell’accelerazione che si misura applica
delle forze d’inerzia al materiale.
L’effetto piezoresistivo viene sfruttato
anche applicando due strati piezoresistivi
sulle facce superiori ed inferiori di un
elemento deformabile, caricato a flessione,
e collegati ad un ponte di Wheatstone.
Trave a
sbalzo
Massa
sismica
Fluido
smorzante
Esso si comporta come un estensimetro e
genera una variazione della tensione
proporzionale alla forza d’inerzia generata
dall’accelerazione.
Corpo accelerato
I materiali piezoresistivi sono idonei per la misura
sia di accelerazioni statiche che variabili.
Accelerazione
43
Accelerometri: capacitivi
Il movimento del corpo mobile determina la variazione della capacità letta
fra le armature; si ha di conseguenza la generazione di una tensione in
uscita proporzionale all’accelerazione.
Una tipologia di capacitivi in forte
espansione è quella dei MEMS
(Micro Electro Mechanical
System) che prodotta
dall’industria elettronica combina
basso costo a ridottissimo
ingombro.
Accelerazione imposta
Colleg.
elettrico
Elettronica
Armature
condensatore
Molla di
reazione
Elemento
sensibile
44
18
Accelerometri: servoaccelerometri
I servo accelerometri differiscono da tutti gli altri modelli poiché hanno una
modalità di lavoro per azzeramento.
L’uscita di misura è proporzionale all’intervento necessario per eliminare il
movimento della massa sismica indotto dall’accelerazione.
Questo strumento è molto più
complesso dal punto di vista
realizzativo poiché necessita di:
sensori / attuatori / sistema di
retroazione;
logica di retroazione rapida.
45
Accelerometri: servoaccelerometri
Rispetto ad un trasduttore di altra natura:
CONTROLLER
costo verosimilmente più elevato;
precisione verosimilmente più alta;
risposta dinamica in genere assai
limitata;
maggiori dimensioni e peso.
I servo accelerometri sono in grado di
rilevare la componente statica
dell’accelerazione.
46
19
Materiale integrativo
47
Elementi sugli accelerometri
48
20
Misure di accelerazione (3)
• Configurazioni interne di accelerometri piezoelettrici
Compressione
Compressione
Isolata
Compressione
inversa
A taglio
49
Sensori digitali (ENCODER)
64
21
Encoder
Gli encoder sono pseudo-trasduttori utili per la misura del movimento di
corpi: pseudo- perchè l’uscita non è proporzionale alla grandezza rilevata
Un encoder angolare è un trasduttore utile per la misura dell’angolo di
rotazione di un albero ed è il tipo di encoder più diffuso.
Un encoder lineare misura invece lo spostamento di un corpo
sostituendo al disco una lamina lineare.
Normalmente un encoder usa una
tecnologia ottica: un elemento
presenta delle zone trasparenti alla
luce (es la corona esterna di un disco
calettato sull’albero rotante).
Un fascio luminoso puntato sull’
elemento viene intercettato da un
apposito sensore solo al passaggio
delle aree trasparenti.
Quando ciò accade il sensore genera
un segnale elettrico, es una tensione di
65
5 V altrimenti la tensione è nulla.
Encoder
Il segnale di uscita dal sensore ottico è
costituito da una successione di onde
quadre: la tensione è nulla o ha un
valore caratteristico (es 1 o 5 V).
Uscita
[V]
Tempo
L’encoder è un trasduttore digitale: la sua uscita in tensione contiene un
numero di eventi proporzionale al movimento subito, non è quindi in
analogia con l’ingresso
Gli eventi devono essere contati per risalire alla misura cercata: lo
strumento di misura è quindi il contatore di impulsi.
Il conteggio deve essere rapportato al campo di misura del trasduttore
giro/lunghezza (N = numero di incisioni trasparenti presenti sul supporto)
α = N Lettura
360°
N Giro
d = N Lettura
L
N Lunghezza
Può essere usato solo in modalità differenziale per misurare un movimento
relativo: non dispone di uno zero e non è identificabile la posizione iniziale.
Non è in grado inoltre di capire il verso del movimento poiché il conteggio
66
aumenta sempre.
22
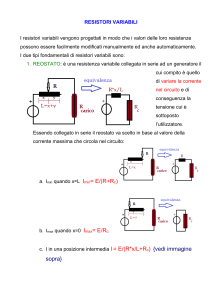
Encoder
Esistono vari tipi di encoder in commercio.
Lineari (barre ottiche)
Angolari
67
Encoder
Esistono vari tipi di encoder angolare che ovviano ad uno o entrambi i
problemi presentati precedentemente.
Encoder monodirezionale: presenta due piste (A e Z) sulla corona
circolare del disco e due foto rilevatori.
Uscita A: N impulsi per giro.
Uscita Z: 1 impulso per giro.
Necessità di due contatori uno per A e uno per Z.
L’aggiunta dell’uscita Z definisce lo zero del trasduttore: il contatore A
viene azzerato all’incremento di Z. L’impossibilità comunque di allineare
lo strumento ad una posizione iniziale ancora non permette misure
assolute di rotazione/spostamento.
Il canale Z aiuta a tenere conteggi elevati: numero di giri rilevati (nZ) e
numero di impulsi rilevati nel giro (nA) danno la rotazione totale.
Non consente di capire il verso di rotazione dell’albero.
68
23
Misure di spostamento
Encoder bidirezionale: tre uscite (A,B e Z) sulla corona circolare del
disco e tre foto rilevatori.
Rotazione oraria:
A
A in anticipo su B
B
Z
Rotazione antioraria:
B in anticipo su A
A
B
Z
Il verso di rotazione viene ottenuto dalla misura di sfasamento tra i
segnali A e B.
69
Encoder
Il numero massimo di incisioni trasparenti dipende dalle dimensioni del
disco (1-9000).
La risoluzione angolare è determinata dal numero di incisioni sul disco
(N). Siccome ogni rotazione è pari a 360°si ha che la risoluzione di un
encoder è ∆θ = 360°/N.
Per uno strumento che non presenti la pista Z il conteggio degli impulsi
fornisce la rotazione θ = n 360°/N. Per conteggi elevati si può avere il
problema della saturazione del contatore (Roll-over ).
Gli encoder possono essere utilizzati anche per determinare la velocità
angolare di un albero. Esistono due modalità: o misurando il ∆t tra due
eventi o contando gli impulsi su una base temporale fissa.
∆t
Tempo
ω = ∆θ / ∆t
TBase
70
24
Encoder
Encoder assoluto
Disco codificato con n piste (bit)
ciascuna divisa in N settori angolari
oscurati o trasparenti. Nel caso
riportato si ha N = 2n.
In una stazione di lettura le piste
vengono lette simultaneamente da n
fotorilevatori indipendenti.
La batteria di fotorilevatori fornisce
un’uscita in codice binario di n bit.
Collimatore
Per ogni settore angolare si ha un
codice differente a seguito del
mascheramento selettivo delle piste.
Sorgente
luminosa
Disco
Fotorilevatori
Albero
72
Encoder
Encoder assoluto:
la codifica binaria è semplice ma può dare
una falsa lettura quando un rilevatore è a
cavallo della transizione (si veda il box
rosso nella slide precedente).
La codifica Gray permette di ridurre li errori
di lettura attraverso un riordino delle
posizioni dei valori di 0 e 1 nei settori
dell’encoder.
Vantaggi: tra due settori adiacenti cambia un solo bit quindi i problemi
derivanti da possibili differenze nella velocità di commutazione dei sensori
ottici non comporta una discontinuità dell’uscita.
Svantaggi: necessità di una decodifica della sequenza di 0 ed 1 ottenuta per
risalire al valore corretto.
73
25
Encoder
Nell’encoder angolare assoluto la collocazione
delle tacche più corte sulla corona esterna consente
una risoluzione maggiore a parità di tecnologia di
incisione in quanto lo sviluppo della corona è
maggiore: dato il numero di incisione necessarie la
loro lunghezza sarà maggiore
Schemi delle piste di encoder assoluti angolare e lineare
74
Misure di spostamento
In linea teorica la risoluzione di un encoder è legata essenzialmente al
numero di tacche che si riescono fisicamente ad incidere sul disco, alla
velocità del sensore ottico di generare onde quadre e alla rapidità del
contatore.
In realtà sono presenti altre limitazioni dettate dalle caratteristiche
fisiche dei cavi. La capacità del cavo limita la frequenza massima del
segnale che lo percorre in quanto, funzionando da condensatore, e
dovendo effettuare cicli di carica e scarica, nell’uscita le onde quadre
risultano distorte e difficilmente interpretabili dal contatore.
75
26
Misure di velocità
76
Pick up magnetico
Come abbiamo già visto un encoder è in grado,
acquisendo anche i tempi, di generare
informazioni relative alla velocità di
rotazione/spostamento.
Un sensore analogo che sfrutta un principio
magnetico al posto che ottico è il pick up
magnetico. Per questo sensore vi è in genere
separazione tra il sensore e le incisioni (tacche)
che sono riportate sull’oggetto in misura o calettate
ad esso.
Il pick-up magnetico è abbinato ad un
frequenzimetro che effettua il conteggio degli
impulsi su base temporale assegnata e calcola la
velocità per mezzo di differenze finite.
Questi trasduttori grazie all’economicità ed alla
discreta risoluzione trovano ampio impiego
(sistema di frenata ABS).
77
27