Tecniche innovative per l’identificazione
delle caratteristiche dinamiche delle
strutture e del danno
Elementi di Dinamica delle
Strutture
Prof. Ing. Felice Carlo PONZO - Ing. Rocco DITOMMASO
Scuola di Ingegneria
Università degli Studi della Basilicata
[email protected]
[email protected]
Dinamica Sismica delle Strutture
Contenuti:
Aspetti generali della dinamica delle strutture e dei terreni
Sistemi ad un grado di libertà
Spettri di risposta
Sistemi anelastici
Sistemi a più gradi di libertà
Sistemi continui
Esercitazioni
Dinamica Sismica delle Strutture
1. ASPETTI GENERALI DELLA DINAMICA
DELLE STRUTTURE E TERRENI
Dinamica Sismica delle Strutture
1. Aspetti generali della dinamica delle strutture e terreni
Azione dinamica: azione variabile con il tempo che induce in una
struttura con massa non trascurabile un moto tale che le forze di
inerzia (Fi = massa x accelerazione) non possono essere trascurate
rispetto alle altre forze.
Classificazione delle azioni dinamiche (in relaz. alla forma):
1 armonica
Macchina
rotante
più armoniche
Motori
Periodiche:
impulsivi
Scoppio di
una bomba
Non
Periodiche:
di lunga durata
Terremoto
Dinamica Sismica delle Strutture
1. Aspetti generali della dinamica delle strutture e terreni
Classificazione delle azioni dinamiche
(in relazione alla descrizione):
deformazioni
DETERMINISTICHE:
Noto istante per istante
Il valore dell’azione
ANALISI
spostamenti
tensioni
spostamenti
ALEATORIE:
Note istante per istante
Le caratteristiche probabilistiche dell’azione
sollecitazioni
deformazioni
ANALISI
sollecitazioni
tensioni
Dinamica Sismica delle Strutture
1. Aspetti generali della dinamica delle strutture e terreni
Proprietà dinamiche delle strutture
Massa
Entità e distribuzione si assumono costanti durante l’eccitazione dinamica
Meccanismo di accumulo e rilascio dell’energia di deformazione
Meccanismo di dissipazione dell’energia
K
M
C
Dinamica Sismica delle Strutture
2. SISTEMI AD UN GRADO DI LIBERTA’
Dinamica Sismica delle Strutture
2.1 Sistemi elastici (1-GDL) – Oscillazioni Libere non smorzate
Si consideri un oscillatore elementare di massa m e rigidezza k.
FI + FE = 0
&&
FI = −m⋅ u(t)
forza d'inerzia
K
M
FE = −k ⋅ u(t) forza di richiamo elastico
x
&& k ⋅ u = 0
m⋅ u+
k
&&
u+
⋅u= 0
m
k
=ω2
m
2π
ω0 =
= 2π ⋅ f 0
T0
M
T0 = 2π ⋅
K
&& ω ⋅ u = 0
u+
2
0
Dinamica Sismica delle Strutture
2.1 Sistemi elastici (1-GDL) – Oscillazioni Libere non smorzate
u(t) = u0 ⋅ cos(ω 0 ⋅ t) +
u&0
ω0
u (t ) = ρ 0 ⋅ cos(ω0t − ϕ 0 )
ρ0 = u02 + (
u&0
ω0
u&0
tan ϕ 0 =
ω 0 ⋅ u0
)2
⋅ sin(ω 0 ⋅ t)
Dinamica Sismica delle Strutture
2.1 Sistemi elastici (1-GDL) – Oscillazioni Libere non smorzate
OSCILLATORE
ELEMENTARE
Dinamica Sismica delle Strutture
2.2 Sistemi elastici (1-GDL) – Oscillazioni Libere smorzate
Si consideri un oscillatore elementare di massa m e rigidezza k.
K
FI + FD + FE = 0
&&
FI = −m⋅ u(t)
forza d'inerzia
&
FD = −c⋅ u(t)
forza smorzante
M
C
FE = −k ⋅ u(t) forza di richiamo elastico
T0 = 2π ⋅
M
K
2π
ω0 =
= 2π ⋅ f 0
T0
c
c
c
=
ξ0 = =
cr 2 ⋅ km 2mω0
&& c⋅ u+
& k⋅u= 0
m⋅ u+
& ω 02 ⋅ u = 0
&& 2 ⋅ ξ 0 ⋅ ω 0 ⋅ u+
u+
x
Dinamica Sismica delle Strutture
2.2 Sistemi elastici (1-GDL) – Oscillazioni Libere smorzate
u (t ) = e −ξ 0 ⋅ω0 ⋅t ⋅ (C1 ⋅ cos(ω0t ) + C2 ⋅ sin(ω0t ))
C1 = u0
C2 =
u& 0 +ξ 0 ⋅ ω 0 ⋅ u0
ω0
u (t ) = ρ 0 ⋅ e −ξ 0ω0t ⋅ cos(ω 0t − ϕ 0 )
ρ 0 = u02 + (
u&0 + ξ 0 ⋅ ω 0 ⋅ u0
ω0
u&0 + ξ 0 ⋅ ω 0 ⋅ u0
tan φ0 =
ω 0 ⋅ u0
)2
ω 0 = ω0 ⋅ 1 − ξ 02
Dinamica Sismica delle Strutture
2.2 Sistemi elastici (1-GDL) – Oscillazioni Libere smorzate
Ai fini pratici possiamo ipotizzare che
U1 = A ⋅ e
U2 = A⋅e
−ξ ⋅ω ⋅t 2
−ξ ⋅ω ⋅t1
= A⋅e
−ξ ⋅ω ⋅( t1 +TD )
U1
−ξ ⋅ω ⋅[ t1 − ( t1 +TD )]
ξ ⋅ω ⋅TD
=e
=e
U2
U1
δ = ln
= ξ ⋅ ω ⋅ TD
U2
δ
ξ=
2⋅π
Dinamica Sismica delle Strutture
2.2 Sistemi elastici (1-GDL) – Oscillazioni Libere smorzate
OSCILLATORE
ELEMENTARE
Dinamica Sismica delle Strutture
2.3 Sistemi elastici (1-GDL) – Forzante Cosinusoidale
Consideriamo un oscillatore elementare, dotato di smorzamento
viscoso, eccitato da una forzante con pulsazione armonica.
P(t)
u (t )
m
k
m
uP(t)
(t )
c,k
c
FI + FD + FE + p(t) = 0
&&
FI = −m⋅ u(t)
forza d'inerzia
&
FD = −c⋅ u(t)
forza smorzante
FE = −k ⋅ u(t) forza di richiamo elastico
p(t) = P0 ⋅ cos(Ω⋅ t)
Dinamica Sismica delle Strutture
2.3 Sistemi elastici (1-GDL) – Forzante Cosinusoidale
Sostituendo otteniamo:
..
.
m ⋅ u + c ⋅ u + k ⋅ u = P0 ⋅ cos(Ω ⋅ t )
Dividiamo per la massa ed eseguiamo delle sostituzioni
c . k
P0
u + ⋅ u + ⋅ u = ⋅ cos(Ω ⋅ t )
m
m
m
c
= 2 ⋅ξ ⋅ω
m
k
= ω2
m
..
Dinamica Sismica delle Strutture
2.3 Sistemi elastici (1-GDL) – Forzante Cosinusoidale
Sostituendo otteniamo:
P0
u + 2 ⋅ ξ ⋅ ω ⋅ u + ω ⋅ u = ⋅ cos(Ω ⋅ t )
m
..
.
2
La soluzione dell ’ equazione può essere espressa mediante la
sovrapposizione della soluzione dell’omogenea associata (ponendo
la forzante pari a zero) e la soluzione particolare. Considerando
solo quest’ultima e ipotizzando una forma della soluzione del tipo
u p = U ⋅ cos(Ω ⋅ t − ϕ )
è possibile ottenere (scegliendo il massimo della funzione):
P0
U=
k
(1 − r )
2 2
1
+ 4 ⋅ξ 2 ⋅ r 2
, con r =
Ω
ω
Dinamica Sismica delle Strutture
2.3 Sistemi elastici (1-GDL) – Forzante Cosinusoidale
P0
U=
k
(1 − r )
2 2
1
+ 4 ⋅ξ 2 ⋅ r 2
c
, con r =
Ω
ω
Dinamica Sismica delle Strutture
2.3 Sistemi elastici (1-GDL) – Forzante Cosinusoidale
FI + FD + FE + P(t) = 0
&&
FI = −m⋅ u(t)
forza d'inerzia
&
FD = −c⋅ u(t)
forza smorzante
FE = −k ⋅ u(t) forza di richiamo elastico
P(t) = P0 ⋅ cos(Ω⋅ t)
Soluzione
dell’equazione del
moto
..
Soluzione
dell’Omogenea
Associata
Soluzione
Particolare
Soluzione
Transitoria
Soluzione a
Regime
.
m ⋅ u+ c ⋅ u+ k ⋅ u = 0
u p = U ⋅ cos(Ω ⋅ t − ϕ )
Dinamica Sismica delle Strutture
2.3 Sistemi elastici (1-GDL) – Forzante Cosinusoidale
Tempo di
Assestamento
Nel passaggio dalla fase transiente alla fase a regime, quando la frequenza
propria del sistema è “abbastanza” vicina alla frequenza della forzante, è
possibile confondere la transizione tra queste due fasi con una variazione della
frequenza propria del sistema
Dinamica Sismica delle Strutture
2.3 Sistemi elastici (1-GDL) – Forzante Cosinusoidale
OSCILLATORE
ELEMENTARE
Dinamica Sismica delle Strutture
2.4 Sistemi elastici (1-GDL) – Forzante Periodica
- Trasformare l’azione in serie di fourier: somma di infiniti termini
armonici.
- Soluzione particolare espressa come somma delle infinite
soluzioni particolari (Sovrapposizione degli affetti)
- Nella risposta verranno esaltate quelle componenti con frequenza
prossima a quelle del sistema
2.5 Sistemi elastici (1-GDL) – Forzante qualsiasi
- Analisi nel dominio del tempo: suddivisione dell’azione in impulsi
infinitesimi con sovrapposizione degli effetti
- Dominio delle frequenze: estensione della soluzione adottata per le
forzanti periodiche: somma infiniti termini armonici
- Integrazione numerica diretta dell’equazione differenziale: valida
anche per sistemi non lineari
22
Dinamica Sismica delle Strutture
2. Sistemi elastici ad un grado di libertà (1-GDL)
Si consideri un oscillatore elementare di massa m, rigidezza k e coefficiente di
smorzamento viscoso c.
x(t) = u(t) + xg(t) = spostamento assoluto
.
.
.
..
..
..
x(t) = u(t) + xg(t) = velocità
velocità assoluta
x(t) = u(t) + xg(t) = accelerazione assoluta
Dato un sistema di riferimento inerziale fisso e rappresentata l’eccitazione sismica come
uno spostamento orizzontale del suolo xg(t), il sistema oscillerà con uno spostamento
relativo u(t) rispetto al terreno. Spostamento, velocità ed accelerazione assoluti del
sistema sono espressi dalle relazioni in figura.
Dinamica Sismica delle Strutture
2.4 Sistemi elastici ad un grado di libertà (1-GDL)
Le forze in gioco sono: (i) la forza di richiamo elastico, (ii) la forza resistente
viscosa e (iii) la forza di inerzia.
Applicando il principio di D’Alambert, si ottiene l’equazione del moto del
sistema:
∑ Fi = m&x&
− cu& − ku = m&x&
Dinamica Sismica delle Strutture
2.4 Sistemi elastici ad un grado di libertà (1-GDL)
Riscrivendo l’accelerazione assoluta come somma dell’accelerazione relativa
più l’accelerazione del terreno, e dividendo tutto per la massa, l’equazione del
moto può essere riscritta nella forma:
ω=
&u& + 2 ⋅ ξ ⋅ ω ⋅ u& + ω2 ⋅ u = −x
&&g
k
= pulsazione propria [rad/sec]
m
T=
2π
= periodo naturale di vibrazione[sec]
ω
ξ=
c
= rapporto critico di smorzamento
2mω
Il periodo naturale di vibrazione ed il rapporto critico di smorzamento sono
caratteristiche dinamiche intrinseche del sistema (non dipendono dall’azione).
Il periodo di vibrazione T rappresenta il tempo impiegato dalla struttura (non
smorzata) per compiere un’intera oscillazione.
Il rapporto critico di smorzamento ξ porta in conto le capacità dissipative in
campo elastico del sistema.
Dinamica Sismica delle Strutture
2.4 Sistemi elastici ad un grado di libertà (1-GDL)
• Per ξ > 1, la struttura disturbata dal suo stato di quiete (u(0)≠0), ritorna nella
sua configurazione iniziale senza oscillazioni.
• Per ξ < 1, il sistema, disturbato dal suo stato di quiete, oscilla con ampiezze
decrescenti, con pulsazione e periodo pari a:
ωD = ω ⋅ (1 − ξ 2 )
TD = T
(1 − ξ 2 )
Per le strutture in c.a. e muratura si assumono comunemente rapporti critici di
smorzamento intorno al 5%; per quelle in acciaio intorno al 2%.
Da ciò si ricava che, per le strutture usuali, il termine (1-x2) risulta molto
prossimo ad 1, per cui l’influenza dello smorzamento sui parametri caratteristici
della risposta dinamica del sistema risulta trascurabile.
Dinamica Sismica delle Strutture
2.4 Sistemi elastici ad un grado di libertà (1-GDL)
La soluzione dell’equazione del moto, assumendo ω=ωD, può essere scritta
nella forma (integrale di Duhamel):
1
− ξω( t − τ )
&
&
u( t ) = − ∫ x g ( τ ) ⋅ e
⋅ senω(t − τ) ⋅ dτ
ω
derivando si ottiene:
&u(t ) = − ∫ &x&g ( τ) ⋅ e − ξω( t − τ ) ⋅ cos ω(t − τ) ⋅ dτ − ξ ⋅ ω ⋅ u(t )
ed infine:
&x& = −ω2 ⋅ u(t ) − 2ωξ ⋅ u& (t )
Dinamica Sismica delle Strutture
2.4 Sistemi elastici ad un grado di libertà (1-GDL)
Determinato u(t), e nota la rigidezza k del sistema, è possibile definire,
in ogni istante di tempo, una forza statica equivalente :
Fs = k ⋅ u(t )
che applicata staticamente alla struttura produce gli stessi effetti
(spostamenti, sollecitazioni, ecc.) calcolati risolvendo l’equazione del
moto. La forza statica equivalente Fs può anche essere calcolata come
prodotto fra la massa del sistema m ed un ’ accelerazione a(t)
generalmente indicata con il termine di pseudoaccelerazione:
Fs = k ⋅ u(t ) = m ⋅ ω ⋅ u(t ) = m ⋅ a(t )
2
Analogamente si può definire una pseudovelocità v(t) pari a :
v ( t ) = ω ⋅ u( t )
Dinamica Sismica delle Strutture
2.4 Sistemi elastici ad un grado di libertà (1-GDL)
Quando lo smorzamento ξ è nullo, la pseudoaccelerazione coincide con
l ’ accelerazione assoluta del sistema. Analogamente, quando lo
smorzamento ξ è nullo, la pseudovelocità coincide con la velocità
relativa del sistema:
≈v(t)
u& (t ) = − ∫ &x&g ( τ) ⋅ e − ξω( t − τ ) ⋅ cos ω(t − τ) ⋅ dτ − ξ ⋅ ω ⋅ u(t )
&x& = −ω2 ⋅ u(t ) − 2ωξ ⋅ u& (t )
a(t)
Dinamica Sismica delle Strutture
2.4 Sistemi elastici ad un grado di libertà (1-GDL)
Quando lo smorzamento è abbastanza piccolo (0-20%),
l’approssimazione continua a funzionare bene se si fa riferimento ai
valori massimi della risposta(1), a patto che il periodo non sia troppo
elevato:
Confronto fra accelerazione e pseudoaccelerazione massima
(1)
Nell ’ istante in cui si
verifica
il
massimo
spostamento si ha la
massima accelerazione e
velocità nulla. Nell ’istante
in cui si ha la massima
velocità si ha spostamento
circa nullo
Dinamica Sismica delle Strutture
3. SPETTRI DI RISPOSTA
Dinamica Sismica delle Strutture
3. Spettri di risposta
Generalmente non è necessario calcolare Fs in ogni istante di tempo, ma basta
conoscere la massima forza agente sul sistema durante il sisma, essendo quella
che indurrà le massime sollecitazioni:
max
s
F
= k ⋅u
max
= m ⋅a
max
da cui deriva il concetto di spettro di risposta elastico.
Lo spettro di risposta elastico Se(T,x) è un diagramma che fornisce il valore
massimo della risposta di sistemi elastici ad 1-GL in funzione del loro periodo
proprio di vibrazione e del loro rapporto critico di smorzamento. Generalmente
come parametri di risposta si utilizzano lo spostamento relativo, la pseudovelocità e la pseudoaccelerazione.
Quindi, per una data eccitazione sismica, gli spettri di risposta elastici
riassumono il comportamento di tutti i sistemi elastici ad 1-GL con periodo
variabile fra 0 e ∞ e rapporto critico di smorzamento fissato.
Dinamica Sismica delle Strutture
3. Spettri di risposta
ak-max
aj-max
sk-max
ai-max
sk(t)
sj-max
si-max
Tk
Tj
Ti
Figura tratta da:
“Progetto sismico di strutture nuove in
c.a. ai sensi dell’Ordinanza n. 3274”,
a cura di R. Marnetto, L. Massa e M.
Vailati
Dinamica Sismica delle Strutture
3. Spettri di risposta
vmax3
vmax2
vmax1
Sd = vmax
T1 , ξ
T2 , ξ
Sv = ω Sd
T3 , ξ
Sd/PGD
Sa = ω2 Sd
Sa/PGA
5
4
2%
15%
3
5%
20%
10%
25%
1.5
1.2
0.9
2
0.6
1
0.3
0
0
0
0.5
1
1.5
2
T (sec)
T (sec)
0
0.5
1
1.5
2
Dinamica Sismica delle Strutture
3. Spettri di risposta
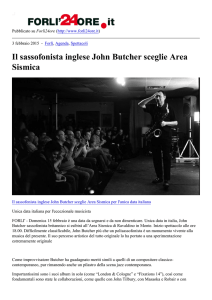
www.seismosoft.com/en/Download.aspx
Componente E-W della registrazione di Gemona del terremoto del Friuli (1976)
(a) Storia delle
accelerazioni, velocità e
spostamenti del terreno,
(b) Spettro di risposta
elastico delle pseudoaccelerazioni
normalizzato rispetto
all’accelerazione di
picco del terreno,
(c) Spettro di risposta
elastico delle pseudovelocità normalizzato
rispetto alla velocità di
picco del terreno,
(d) Spettro di risposta
elastico degli
spostamenti
normalizzato rispetto
allo spostamento
massimo del terreno.
Dinamica Sismica delle Strutture
3. Spettri di risposta
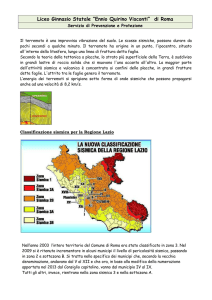
Componente E-W della registrazione di Sturno del terremoto Campano-Lucano (1980)
(a) Storia delle accelerazioni,
velocità e spostamenti del
terreno,
(b) Spettro di risposta
elastico delle pseudoaccelerazioni
normalizzato rispetto
all’accelerazione di picco
del terreno,
(c) Spettro di risposta
elastico delle pseudovelocità normalizzato
rispetto alla velocità di
picco del terreno,
(d) Spettro di risposta
elastico degli spostamenti
normalizzato rispetto allo
spostamento massimo del
terreno.
Dinamica Sismica delle Strutture
3. Spettri di risposta
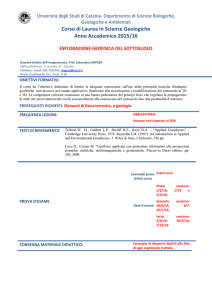
Componente vert. della registrazione di Sturno del terremoto Campano-Lucano (1980)
(a) Storia delle accelerazioni,
velocità e spostamenti del
terreno,
(b) Spettro di risposta
elastico delle pseudoaccelerazioni
normalizzato rispetto
all’accelerazione di picco
del terreno,
(c) Spettro di risposta
elastico delle pseudovelocità normalizzato
rispetto alla velocità di
picco del terreno,
(d) Spettro di risposta
elastico degli spostamenti
normalizzato rispetto allo
spostamento massimo del
terreno.
Dinamica Sismica delle Strutture
Sa/PGA
3. Spettri di risposta
T>>T
T≈0
per valori del periodo prossimi a zero (strutture molto rigide) l’accelerazione
massima del sistema tende a quella del terreno;
per piccoli aumenti del periodo si ha una notevole amplificazione della
accelerazione massima. Al 5% di smorzamento, l’amplificazione massima si
attesta intorno a 2.5 nell’intervallo 0.2sec e 0.8 sec circa;
per valori del periodo superiori a quelli predominanti del sisma (strutture
flessibili) l’accelerazione massima del sistema tende rapidamente a zero.
Dinamica Sismica delle Strutture
Sd/PGD
3. Spettri di risposta
T>>T
c
T≈0
per strutture rigide lo spostamento relativo del sistema risulta inferiore a
quello del terreno, al limite tende a zero per periodi prossimi a zero;
per strutture con periodo intermedio (nel caso in esame 1-2.5 sec) lo
spostamento relativo del sistema risulta amplificato rispetto a quello del terreno;
per strutture molto flessibili lo spostamento relativo del sistema tende a quello
del terreno.
Dinamica Sismica delle Strutture
Sd/PGD
Sa/PGA
3. Spettri di risposta
all’aumentare dello smorzamento la risposta massima del sistema si riduce.
L’entità di tale riduzione varia a seconda del periodo del sistema (e delle
caratteristiche del sisma).
Comunque, l’effetto tende a scomparire per T 0 e T ∞.
Dinamica Sismica delle Strutture
3. Spettro di risposta
Utilizzando lo spettro di risposta elastico è possibile ricondurre lo studio di un
problema dinamico (determinazione dei massimi effetti prodotti dal sisma su una
struttura) ad un problema statico:
Fsmax = k ⋅ S De = m ⋅ ω2 ⋅ S De = m ⋅ S Ae
Fsmax m ⋅ S Ae S Ae
=
=
=C
W
W
g
Dinamica Sismica delle Strutture
3. Spettro di risposta
Esempio 1:
Analisi di un sistema ad 1-GL con spettro di risposta
1. Caratteristiche dinamiche del modello
m, EJt = ∞
h
EJp
v
F,v
m = µ ⋅ L = 10 tsec2 / m
EJp
k=
v&&g
30x50
12 ⋅ EJp
k=
2 ⋅ 12 ⋅ EJp
h3
= 3515 t/m
h3
30x50
h = 4m
L
m = 2 tonsec2/m2
L=5m
T = 2π ⋅
m
= 0.33 sec
k
Dinamica Sismica delle Strutture
3. Spettro di risposta
Esempio 1:
Analisi di un sistema ad 1-GL con spettro di risposta
2. Forze statiche equivalenti
m, EJt = ∞
EJp
v
EJp
Sa (m/sec2)
Fs
h
10
9
8
7
Spettro elastico NI
6
(zona 1_suolo A)
5
4
x = 5%
3
2
PGA = 0.35g
1
0
v&&g
30x50
0
30x50
L
0.5
1
1.5
2
2.5
3
3.5
4
Periodo (sec)
T = 0.33 sec ⇒ SAe = 8.58 m/sec2
SAe = 8.58 m/sec2 ⇒ Fsmax = m ⋅ SAe = 86 t
Dinamica Sismica delle Strutture
3. Spettro di risposta
Esempio 1:
Analisi di un sistema ad 1-GL con spettro di risposta
3. Sollecitazioni massime
Fsmax = 86 t
m, EJt = ∞
EJp
Tp
Mp
Np
Np
EJp
Tp = Fsmax / 2 = 43 t
Tp
Tp
Mp
Mp
Np
Mpmax = Tp ⋅ h / 2 = 86 tm
Np = (Fs ⋅ h − 2 ⋅ Mpmax ) / L = 34 t
Dinamica Sismica delle Strutture
3. Spettro di risposta
Esempio 2:
Analisi di un sistema ad 1-GL con spettro di risposta
g CLS= 2.5 ton/m3
1. Modello strutturale
ECLS = 3x106 ton/m2
µ= 0.4 ton/m
d=?
Kiso=20 ton/m
5
6
6
xiso =10%
F,v
m, EJt = ∞
2.5
0.5
EJpb
Kiso xiso
1.5
0.75
v&&g
1
3
EJpa
EJpa
30x30
30x50
30x60
k=
12 ⋅ EJp
k
ω=
m
h3
0.5
6
T=
2π
ω
Dinamica Sismica delle Strutture
3. Spettro di risposta
Esempio 2:
Analisi di un sistema ad 1-GL con spettro di risposta
2. Calcolo degli spostamenti massimi
0.5 ⋅1 ⋅ 6 ⋅ 2.5 2.5 ⋅ 5 ⋅ 0.5 ⋅ 2.5
+
= 2.36ton sec2 / m
9.81
9.81
k1 = 4 ⋅ 20 = 80ton / m
T1 =
m2 =
2π
k1
m1
=
µ ⋅ 2L
g
=
6.28
80
2.36
= 1.078 sec
0.4 ⋅12
= 0.49ton sec2 / m
9.81
T 1 = 1.078 sec ⇒ SAe1 = 3.25 m/ sec2 ⇒ SDe1 = 0.0959 m
T 2 = 0.052 sec ⇒ SAe2 = 4.67 m/ sec2 ⇒ SDe2 = 0.0003m
Sa (m/sec2)
m1 =
S De =
10
9
S Ae
ω2
8
7
6
12 ⋅ 3 ⋅ 106 ⋅ 0.34 12 12 ⋅ 3 ⋅ 106 ⋅ 0.3 ⋅ 0.53 12 12 ⋅ 3 ⋅ 106 ⋅ 0.3 ⋅ 0.63 12
k2 =
+
+
= 7199ton/ m 5
3
3
3
3
3
3.75
4
3
T2 =
2π
k2
m2
=
6.28
7199
0.49
2
= 0.052 sec
1
0
0
0.5
1
1.5
2
2.5
3
3.5
4
Periodo (sec)
Dinamica Sismica delle Strutture
4. SISTEMI ANELASTICI
Dinamica Sismica delle Strutture
4. Sistemi anelastici
Sistema elastico non smorzato (c = 0)
L’energia immessa dal sisma nella struttura
(area abc), attraverso il moto del terreno,
viene accumulata dal sistema sottoforma di
energia elastica di deformazione e di energia
cinetica. Durante il moto si verifica un
continuo scambio fra le due forme di energia
ed il sistema continua ad oscillare, attorno
alla posizione originaria, con ampiezza
costante.
Sistema anelastico non smorzato (c = 0)
Cerniera
plastica
All ’ atto dell ’ inversione del moto
(raggiungimento dello spostamento massimo),
solo parte dell ’ energia di deformazione
accumulata (area cdef) si trasforma in
energia cinetica (area efg), poiché la restante
parte (area cdeg) è stata dissipata, sottoforma
di calore, dalla cerniera plastica. Le
oscillazioni del sistema risultano smorzate ed
esso ritorna rapida-mente nella sua posizione
di quiete.
Dinamica Sismica delle Strutture
4. Sistemi anelastici
Sotto certe ipotesi (...), oscillatore
elastico ed oscillatore anelastico, aventi
il medesimo periodo di vibrazione
iniziale,
esibiscono
lo
stesso
spostamento massimo a seguito del
sisma (umax).
Medesime prestazioni (↔ livelli di sicurezza) sotto sisma possono essere
ottenute facendo affidamento (i) su livelli di resistenza elevati (Fse_max), con
oscillazioni in campo elastico della struttura o (ii) sulla capacità del sistema di
subire escursioni in campo plastico dissipando energia (duttilità),
ammettendo in tal caso livelli di resistenza molto più bassi (Fs_y).
Dinamica Sismica delle Strutture
4. Sistemi anelastici
La risposta sismica di sistemi anelastici può essere studiata
seguendo due approcci diversi:
1. Considerando un sistema elastico equivalente:
Keq
m
Ko
Keq
Wd
ceq
Ws
&& + ceq u& + k equ = − m&x&g
mu
umax
ceq
m ⋅ keq
=
Wd
2π ⋅ Ws
keq =
Fy
u max
2. Utilizzando un modello non lineare per il legame
costitutivo del materiale:
Fs(u)
m
F
c
u
&& + cu& + Fs (u ) = − m&x&g
mu
Dinamica Sismica delle Strutture
4. Sistemi anelastici - Spettri di risposta non lineari
Fs (u )
&& + 2ωξ ⋅ u& +
u
= − &x&g
m
ω=
k
m
ξ=
c
2mω
Oscillatore semplice elasto-plastico soggetto ad azione sismica
E’ facile dimostrare che la risposta dell’oscillatore elasto-plastico tende a
coincidere con quella di un oscillatore identico ma a comportamento
indefinitamente elastico, nell’ipotesi di:
(i) sistema molto deformabile,
(ii) sistema molto rigido.
Dinamica Sismica delle Strutture
4. Sistemi anelastici - Spettri di risposta non lineari
sistemi molto deformabili
sistemi molto rigidi
(sia elastici che elasto-plastici)
(sia elastici che elasto-plastici)
2
d 2xg
d 2u
d 2 x d 2u d x g
x = xg + u ≈ 0 ⇒ u = −xg ⇒ 2 ≈ − 2 ⇒ 2 = 2 +
≈0
dt
dt
dt
dt
dt 2
Fsmax = m ⋅ S Ae = m ⋅ ω 2 ⋅ S De = m ⋅
umax → xgmax
4π 2 max
4π 2 max
⋅
u
=
−
m
⋅
⋅ xg
T2
T2
T →∞
Fsmax → 0
2
d2x d xg
x ≈ xg ⇒ 2 ≈
⇒ u = x −xg ≈ 0
dt
dt 2
u max → 0
Fsmax → m ⋅ &x&max
g
Dinamica Sismica delle Strutture
4. Sistemi anelastici - Spettri di risposta non lineari
Quanto detto finora, in aggiunta all’evidenza di numerosi studi di
carattere numerico e sperimentale, consente di correlare la risposta (in
termini di spostamento e forza massima) di un sistema elastico con la
risposta di un sistema anelastico avente lo stesso periodo iniziale To.
Bisogna distinguere tre casi:
(1) Strutture che hanno un periodo iniziale To maggiore del periodo
dominante del sisma (0.1sec < Tav < 0.3sec per terreni rigidi, Tav > 1sec
per terreni molto soffici);
(2) Strutture molto rigide, che hanno un periodo proprio iniziale To
molto prossimo a zero;
(3) Strutture che hanno un periodo proprio iniziale To nell’intorno del
periodo dominante del sisma.
Dinamica Sismica delle Strutture
4. Sistemi anelastici - Spettri di risposta non lineari
(1) To > Tav
il massimo spostamento raggiunto dal sistema
anelastico risulta mediamente uguale a quello raggiunto dal
corrispondente sistema elastico …….
umax
≈ umax
≈ xmax
a
e
g
umax
umax
S
a
µ=
≅ e = De
uy
uy
uy
max
Fsmax
= k ⋅ SDe = m ⋅ S Ae
,e = k ⋅ ue
Fs,y = k ⋅ uy ≅
SAa =
Fsmax
,a
m
Fsmax
,e
µ
=
Fs,y
m
=
m ⋅ SAe
µ
=
SAe
µ
…...e l’accelerazione spettrale pari a quella del sistema elastico
divisa per la duttilità. Resta quindi definito un fattore di riduzione
della forza R = m
Dinamica Sismica delle Strutture
4. Sistemi anelastici - Spettri di risposta non lineari
(2) To ≈ 0
le accelerazioni massime raggiunte dai due sistemi
(elastico ed anelastico) risultano all’incirca pari all’accelerazione
massima del terreno……......………..
max
&&max
Fsmax
,a = Fs ,e = m ⋅ xg
max
s ,a
F
< Fs ,y
umax
= umax
a
e
max
s ,a
F
= Fs ,y
SAa = S Ae
umax
k ⋅ uy = k ⋅ a = k ⋅ umax
e
µ
umax
= µ ⋅ umax
a
e
………...conviene progettare il sistema anelastico in modo che
rimanga in campo elastico. Il fattore di riduzione della forza risulta
quindi R = 1
Dinamica Sismica delle Strutture
4. Sistemi anelastici - Spettri di risposta non lineari
(3) To < Tav
sistema elastico e sistema anelastico presentano
stessa energia di deformazione in corrispondenza del rispettivo
spostamento massimo…...
(
)(
1 max
Fs,e − Fs ,y ⋅ umax
− uy
e
2
Fsmax
,e
Fs ,y
umax
=
a
)
umax
= e
uy
µ
umax
e
2µ − 1
Fs ,y =
(
Fs ,y ⋅ umax
− umax
a
e
)
umax
µ= a
uy
Fs,e
2µ − 1
SAa =
S Ae
2µ − 1
………...Il fattore di riduzione della forza del sistema anelastico
rispetto alla massima del sistema elastico risulta proporzionale alla
radice quadrata della duttilità.
Dinamica Sismica delle Strutture
4. Sistemi anelastici - Spettri di risposta non lineari
R = 2µ − 1
SAe
R →1
R=µ
SAa
Forze di progetto per un sistema anelastico Spettro elastico diviso per un
fattore di riduzione della forza (R) funzione della duttilità della struttura e
dipendente dal periodo di vibrazione iniziale del sistema.
Dinamica Sismica delle Strutture
5. SISTEMI A PIÙ GRADI DI LIBERTA’
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Le strutture tipiche dell’ingegneria civile non sono schematizzabili come
semplici oscillatori elementari ad 1-GL. Nel caso, ad esempio, di edifici
multipiano, con solai rigidi nel piano, è possibile concentrare le masse nei
piani, assumendo come gradi di libertà dinamici gli spostamenti orizzontali,
secondo due direzioni ortogonali, e la rotazione attorno all’asse verticale di
ciascuna massa di piano.
Il comportamento nello spazio di un edificio di N piani è descritto da 3N gradi
di libertà dinamici, che si riducono ad N se si opera nel piano.
Elemento fondamentale della dinamica dei sistemi elastici ad N-GL è la
individuazione dei modi di vibrare del sistema, in numero pari al numero di
gradi di libertà del sistema.
In ciascun modo, tutte le masse oscillano con la medesima pulsazione ed in
fase, mantenendo immutati i rapporti tra le ampiezze.
La risposta di una struttura elastica ad una qualsiasi forzante esterna o
perturbazione iniziale può comunque essere espressa attraverso una
combinazione lineare di modi di vibrare.
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
(a) Schematizzazione di un edificio a 5 piani con solai rigidi nel piano (5-GL), (b) modello a masse concentrate,
(c) modi di vibrare del sistema
Modi di vibrare Analisi modale
Richiami di Calcolo Matriciale
Si definisce matrice (numerica) di ordine m x n un
insieme di numeri ordinati in una tabella con m righe e n
colonne.
A11 A12 ... A1n
A
A
A
...
22
2n
A = 21
...
... ... ...
A
A
...
A
m2
mn
m1
se m ≠ n
matrice rettangolare
a1
a
2
a=
...
am
se n = 1
vettore
se m = n
matrice quadrata
Richiami di Calcolo Matriciale
Matrice diagonale
A11
0
A= 0
...
0
0
A22
0
0
0
A33
...
...
0
0
0
0
... 0
... ...
... Ann
...
...
Matrice identità
1 0 0 ... 0
0 1 0 ... 0
I = 0 0 1 ... 0
...
...
...
...
...
0 0 0 ... 1
Matrice bandata
A11 A12 0 ... 0
A
A
A
...
0
22
23
21
se A = A
ij
ji
A = 0 A32 A33 ... 0
A si dice simmetrica
...
... ... ...
...
0
0
0 ... Ann
Richiami di Calcolo Matriciale
A=B
se
Aij = Bji
A+B=C
se
Cij = Aij + Bji
B = cA
se
A+B=B+A
(A+B)+C=A+(B+C)
Bij = cAij
Dati A(mxn), B(mxn): B = AT
se
Bij = Aij ; se A è simmetrica AT=A
La trasposta di AT di A si ottiene scambiando le righe
con le colonne.
Dati A(mxn), B(nxp), C(mxp) :C = AB se Cij =
ΣA
ik
k
Bkj
Richiami di Calcolo Matriciale
L ’ elemento Cij della matrice prodotto si ottiene
sommando i prodotti degli elementi corrispondenti della
i-esima colonna di A e della j-esima riga di B.
Il prodotto tra due matrici A e B si può effettuare solo se
il numero di colonne di A è uguale al numero di righe di
B.
A(BC) = (AB)C = ABC;
A(B+C) = AB+AC;
AB ≠ BA se simm AB = BA;
AI = IA =A; (ABC)T=CTBTAT
Richiami di Calcolo Matriciale
A11 A12
A A
22
21
A = 0 A32
... ...
0
0
0
...
A23 ...
A33 ...
... ...
0
...
0
A11 A12
0
A
A22
21
0 A=
... ...
...
An1 An2
Ann
... A1n
... A2n
α
= Σ(− 1) (A1i
... ...
... Ann
A2 j
A3k ...), i ≠ j ≠ k
• La somma si estende a tutte le permutazioni;
• α è l’ordine della permutazione.
Se A = 0 la matrice A si dice singolare
A11 A12
A=
= A11 A22 − A21 A12
A21 A22
A11 A12 A13
A = A21 A22 A23 = A11 A22 A33 + A12 A23 A31 + A21 A32 A13 −
A31 A32 A33
− A13 A22 A31 − A32 A23 A11 − A21 A12 A33
Richiami di Calcolo Matriciale
Data A(nxn): si dice che A-1(nxn)è inversa di A se:
( )
A −1 A = AA−1 = I → A−1
Vale per il prodotto la regola:
se: A =
A11
A21
A11
−1
=A
( ABC ) −1 = C −1 B −1 A −1
1 A22 − A12
⇒A =−
A22
A − A21 A11
A12
A12
se: A = A21 A22
A31
A32
A11
0
0
se: A =
...
A22
...
0
0
−1
A22 A33 − A23 A32
1
A23 ⇒ A = A23 A31 − A21 A33
A
A21 A32 − A22 A31
A33
A13
A13 A32 − A12 A33
A11 A33 − A13 A31
A12 A31 − A11 A32
0
1 / A11
0
... 0
1 / A22
1
−1
⇒A =
... ...
...
A ...
... Ann
0
0
...
0
A12 A23 − A22 A133
A13 A21 − A11 A23
A11 A22 − A12 A21
0
...
0
...
...
... 1 / Ann
...
Richiami di Calcolo Matriciale
A11 x1 + A12 x2 + ... + A1n xn = b1
A11
A x + A x + ... + A x = b 2 A
21 1
22 2
2n n
21
⇒
...
...........................................
An1 x1 + An 2 x2 + ... + Ann xn = bn
An1
A12
A22
...
An 2
... A1n x1 b1
... A 2 n x2 b2
=
... ... ... ...
... Ann xn bn
Ax = b ⇒ A−1 Ax = A−1b ⇒ Ix = A−1b ⇒ x = A−1b
Formulazione equazione del moto
Formulazione delle equazioni del moto – Equilibrio
f Ij + f Dj + f Sj = p j
j = 1,..., n
f I 1 f D1 f S 1 p1
... + ... + ... = ...
f f f p
In Dn Sn n
fI + fD + fS = p
Formulazione equazione del moto
..
..
..
f Ij = M j1 v1 + M j 2 v 2 + ... + M jn v n
.
.
.
..
fI = M v
.
f Dj = C j1 v1 + C j 2 v 2 + ... + C jn v n
fD = C v
f Sj = K j1v1 + K j 2 v2 + ... + K jn vn
f S = Kv
Formulazione delle equazioni del moto – Sistema
equazioni differenziali
..
..
.
.
M 11 v1 + ... + M 1n v n + C11 v1 + ... + C1n v n + K11v1 + ... + K1n vn = p1
........................................................................................
........................................................................................
M v.. + ... + M v.. + C v. + ... + C v. + K v + ... + K v = p
nn n
n1 1
nn n
n1 1
nn n
n
n1 1
Formulazione equazione del moto
Forma matriciale e comune
M 11
...
...
M n1
..
... M 1n v1 C11
... ... ... ...
+
... ... ... ...
..
... M nn v C n1
n
..
.
... C1n v1 K11
... ... ... ...
+
... ... ... ...
.
... C nn v n K n1
... K1n v1 p1
... ... ... ...
=
... ... ... ...
... K nn vn p2
.
M v + C v + Kv = p
Equazione del moto - Definizioni
p
vettore dei carichi dinamici;
pij
carico dinamico corrispondente alla coordinata j;
v
vettore degli spostamenti;
vj
spostamento della coordinata j – esima;
Formulazione equazione del moto
.
dv
v=
dt
.
vj =
dv j
dt
d 2v
v= 2
dt
..
d 2v j
vj =
dt 2
..
M
vettore della velocità;
velocità della coordinata j-esima;
vettore delle accelerazioni;
accelerazione della coordinata j-esima;
matrice di massa;
Mji coefficiente di influenza di massa = forza corrispondente alla
coordinata j dovuta ad una accelerazione unitaria della
coordinata i;
Formulazione equazione del moto
C
matrice di smorzamento;
Cji
coefficiente d ’ influenza di smorzamento = forza
corrispondente alla coordinata j dovuta ad una velocità
unitaria della coordinata i;
K
matrice di rigidezza;
Kji
coefficiente d’influenza di rigidezza = forza corrispondente
alla coordinata j dovuta ad uno spostamento unitaria della
coordinata
i;
Matrici di Rigidezza e di Flessibilità
Matrice di Rigidezza
Matrice di Flessibilità
Rigidezza flessionale pilastri
l3
1
f =
=
12 EJl 3 k
12 EJ
k= 3
l
Spostamento o forza unitaria su v1
K11 = k + k = 2k
K 21 = − K11 = −2k
F21 = 1 /(1 / f + 1 / f ) = 1 /(2 K ) = f / 2
F11 = F21 + f / 2 = f
Matrici di Rigidezza e di Flessibilità
Matrice di Rigidezza
Matrice di Flessibilità
Spostamento o forza unitaria su v2
K 22 = 2k + 2k = 4k
F22 = f / 2
K12 = −2k
F12 = F22 = f / 2
k
K = 2
− k
k − k 2 f
KF =
− k 2k f
Matrici
1 2 f
− k
F=
2 f
2k
Dimostrazione K-1 = F, F-1 = K
f 2kf − kf
=
f 2kf − 2kf
kf − kf kf
=
− kf + 2kf 0
f
f
0 k / k
0 1 0
=
=
=I
kf 0 k / k 0 1
Matrice di Rigidezza con il metodo degli elementi finiti
Struttura
gradi di libertà - struttura
gradi di libertà - elemento
η1 =1⇒η(x) =ψ1(x) η 2 = 1 ⇒ η ( x) = ψ 2 ( x) η3 = 1 ⇒ η ( x) = ψ 3 ( x)
η 4 = 1 ⇒ η ( x) = ψ 4 ( x)
Matrice di Rigidezza con il metodo degli elementi finiti
Funzione spostamento elemento
ψ 1 ( x) = 1 − 3( x / s) 2 + 2( x / s) 3
ψ 2 ( x) = 3( x / s) 2 − 2( x / s) 3
ψ 3 ( x ) = x (1 − x / s ) 2
ψ 4 ( x) = ( x 2 / s)( x / s − 1)
η ( x) = η1ψ 1 ( x) + η 2ψ 2 ( x) + η 3ψ 3 ( x) + η 4ψ 4 ( x)
Matrice rigidezza elementi travi
s
Rij = ∫ EJψ i" ( x)ψ "j ( x)dx ; i = 1,....,4;
j = 1,.....,4 ⇒
0
3s
6 − 6 3s
2 Eo J o
2 EJ − 6 6 − 3s − 3s
=
=
R= 3
⇒
R
R
a
b
3
s2
s 3s − 3s 2 s 2
lo
2
2s 2
3s − 3s s
−3
3lo
3lo
3
3
− 3lo − 3lo
2 Eo J o − 3
Rc =
2
2
3
2lo
lo 3lo − 3lo 4lo
2
2
3
l
−
3
l
2
l
4
l
o
o
o
o
−6
6
− 6
6
3lo − 3lo
3lo − 3lo
3lo
− 3lo
2
2lo
2
lo
3lo
− 3lo
;
2
lo
2
2lo
Assemblaggio diretto
K11 = Ra11 + Rb11
K12 = Ra13
K13 = Rb13
K 21 = Ra 31
K 22 = Ra 33 + Rc 33
K 23 = Rc 33 4
K 31 = Rb 31
K 32 = Rc 43
K 33 = Rb 33 + Rc 44
Assemblaggio con matrici posizionate
1
0
Pa =
0
0
0 0
0 0
1 0
0 0
1
0
Pb =
0
0
K=
0
0
Pc =
0
0
0 0
0 0
0 1
0 0
T
P
∑ k Rk Pk
k = a ,b ,c
Matrice di Rigidezza della Struttura
12
2E J
K = o3 o 3lo
lo
3lo
3lo
6lo2
2lo2
3lo
2lo2
6lo2
0 0
0 0
1 0
0 1
Valutazione della matrice di Massa
h = lo
L = 2l o
µa = µo
µb = µo
µ c = 10 µ o
Masse concentrate – ripartizione masse nodi
ma1 = mb1 = ma 2 = mb 2 = µ o lo / 2
I a1 = I b1 = I a 2 = I b 2 = µ o lo3 / 24
mc1 = mc 2 = 10 µ o lo
I c1 = I c 2 = 10 µ o lo3 / 3
Valutazione della matrice di Massa
ma1 + mc1 + mb1 + mc 2
M =
0
0
0
I a1 + I c1
0
= µ o lo
420
I b1 + I c 2
0
0
0
0
8820
0
2
1418
l
0
o
2
0
0
1418lo
Masse consistenti – matrice di massa dell’elemento trave
s
P.L.V.: N ij = ∫ µψ j ( x)ψ i ( x)dx i = 1,.....,4;
0
54
22s
156
54
156
13s
µs
22s
N=
13s
4s 2
420
2
−
13
s
−
22
s
−
3
s
0
0
0
− 13s
0
− 22s 0
− 3s 2
0
4s 2
0
0
420
j = 1,.....4
Masse consistenti – elemento trave
54
22lo − 13lo
156
54
156
13lo − 22l o
µ o lo
2
2
22lo
Na = Nb =
13lo
4lo
− 3lo
420
2
2
13
22
3
4
−
−
−
l
l
l
l
o
o
o
o
0
0
0
0
1080
880lo
− 520lo
3120
1080
3120
520lo
− 880l o
µl
2
2
N c = o o 880lo
520lo
320lo
− 240lo
420
2
2
−
520
l
−
880
l
−
240
l
320
l
o
o
o
o
0
0
0
0
0
0
0 ;
0
420
0
0
0
0
8400
Masse consistenti – assemblaggio
M 11 = N a11 + N b11 + N c 35
M 12 = N a13
M 21 = N a 31
M 22 = N a 33 + N c 33
M 31 = N b 31
M 32 = N c 43
M 13 = N b13
M 23 = N c 34
M 33 = N b 33 + N c 44
Masse consistenti – Assemblaggio
1
0
Pa = 0
0
0
0 0
0 0
1 0
0 0
0 0
1
0
Pb = 0
0
0
M =
0 0
0 0
0 1
0 0
0 0
0
0
Pc = 0
0
1
T
P
∑ k N k Pk
k = a ,b ,c
Masse consistenti – matrice massa struttura
22lo
8712
µ o lo
2
M =
22
l
324
l
o
o
420
22lo − 240lo2
22lo
− 240lo2
324lo2
0 0
0 0
1 0
0 1
0 0
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Equazioni del moto per sistema non smorzato in oscillazioni libere:
&& + KU = 0
MU
U(0) = U0
& (0) = U
&
U
0
0
k 11
m11 0 0
0 ... 0
...
0
K=
M=
0 0 ... 0
...
0
0
0
m
nn
k n1
... ... k 1n
d1 (t )
...
... ... ...
U(t ) =
...
... ... ...
... ... k nn
d
(
t
)
n
Forma della soluzione (definizione di modo di vibrare):
U(t) = Φ ⋅ z(t)
&&z(t)
ΦT KΦ
=− T
= −ω 2
z(t)
Φ MΦ
ΦT MΦ&&z(t)+ ΦT KΦz(t) = 0
&&z(t) + ω 2 z(t) = 0
z(t) = Asin(ω t + Φ)
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
(−MΦω 2 + KΦ)Asin(ω t + Φ) = 0
(K − ω M)⋅ Φ = 0
2
ΦT = [φ1 ... ... φn ]
Le soluzioni dell’equazione del moto diverse da quella banale Φ = 0 sono
tutte e sole quelle che soddisfano la relazione:
K − ω2 M = 0
Equazione di grado “n” in ω
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
La soluzione del problema agli autovalori fornisce le pulsazioni dei modi
di vibrare del sistema (ω
ωj).
Gli autovettori ad essi associati (Fj) rappresentano le forme modali del
sistema, definite a meno di una costante.
K−ω M = 0
2
(
)
2π
ωj → Tj =
→ K - ω2jM ⋅ Φ j = 0 j = 1,...n
ωj
E’ possibile dimostrare che gli autovettori associati a due pulsazioni
distinte (wj ≠ wi) risultano ortogonali rispetto alla matrice delle masse e
delle rigidezze, cioè:
Φ Ti MΦ j = 0
ΦT MΦ,ΦT KΦ
→ diagonali
Φ Ti KΦ j = 0
In conclusione si può affermare che il moto libero di un sistema
non smorzato ad n g.d.l., si può ottenere sovrapponendo n
oscillazioni armoniche di frequenza ω1, ... , ωn;
ad ogni frequenza è associata una “forma” del moto di
oscillazione (detta modo) e definita dall’autovettore Φk,
corrispondente all’autovalore ω2k .
Il moto libero di un sistema si decompone quindi in n modi,
ciascuno oscillante con diversa frequenza (la frequenza del
modo). Poiché ciascuna delle componenti modali del moto zk (t) è
definita a meno di due costanti (l’ampiezza Ak e la fase φk),
l’intero moto è definito a meno di 2n parametri, che si possono
determinare imponendo le condizioni iniziali della posizione u(0)
.
e della velocità u(0) del sistema.
85
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Esempio 1:
struttura intelaiata a tre piani, con impalcati rigidi e pianta quadrata
Modello 2D (3-GL)
Modello 3D (9GL)
Modello 3D_dirX (3GL)
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
La soluzione dell ’ equazione del moto di un sistema ad N-GL può
comunque essere espressa come combinazione lineare dei modi di vibrare
del sistema:
n
U( t ) = ∑ Φ i ⋅ y i ( t )
i =1
le funzioni del tempo yi(t) rappresentano le incognite del problema e
vengono dette coordinate principali.
Sostituendo l’espressione della soluzione nelle equazioni del moto:
&& + KU = 0
MU
∑ [M ⋅ Φ i ⋅ &y& i + K ⋅ Φ i ⋅ y i ] = 0
n
i =1
Premoltiplicando per Fi e sfruttando la proprietà di ortogonalità:
Φ Tj ⋅ M ⋅ Φ i ⋅ &y& i + Φ Tj ⋅ K ⋅ Φ i ⋅ y i = 0
……...…
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
…..…..ponendo quindi:
m*j = ΦTj ⋅ M ⋅ Φi
k *j = ΦTj ⋅ K ⋅ Φi
si ottiene:
m*j ⋅ &y& j + k *j ⋅ y j = 0
ovvero:
&y& j + ω2j ⋅ y j = 0
essendo ω2j = k *j m*j il quadrato della pulsazione del j-mo modo
di vibrare del sistema.
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Introducendo i modi di vibrare si è trasformata l’equazione del moto da un
sistema di equazioni differenziali accoppiate ad un sistema di “n” equazioni
differenziali indipendenti (una per ogni modo), ad un solo grado di libertà
yj(t):
&y& j + ω2j ⋅ y j = 0 j = 1,...n
&& + KU = 0
MU
Determinate le n coordinate principali yj(t), la risposta totale del sistema si
ottiene sfruttando il principio di sovrapposizione degli effetti :
n
U( t ) = ∑ Φ i ⋅ y i ( t )
i =1
Da un punto di vista operativo, ciò corrisponde a vedere la struttura come un
insieme di n sistemi ad 1-GL che concorrono, in misura diversa, a definire la
risposta totale del sistema.
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
I contributi dei modi di vibrare alla risposta totale del sistema non sono tutti
uguali. Generalmente, il contributo è maggiore per i modi con periodo di
vibrazione alto, diminuendo progressivamente per i modi con periodo di
vibrazione basso.
Generalmente, quindi, non è necessario portare in conto tutti quanti i modi per
determinare, con sufficiente approssimazione, la risposta totale della struttura.
Al limite, se il primo modo risulta essere preponderante sugli altri, è possibile
approssimare il comportamento di un sistema ad N-GL con quello di un sistema
ad 1-GL, avente periodo pari a quello del primo modo di vibrare della struttura.
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
In presenza di sisma:
&& + CU
& + KU = −M ⋅ R ⋅ x
&& g
MU
c11
...
C=
...
cn1
...
...
...
...
... c1n
... ...
= α ⋅M + β⋅K
... ...
α , β = f ( ω1 ,ω2 ,ξ1 ,ξ 2 )
... cnn
C = matrice di smorzamento viscoso
x&&g = storia delle accelerazioni del terreno (accelerogramma)
R = vettore di trascinamento, che fornisce i coseni direttori dei gradi di libertà rispetto
alla direzione dell’azione sismica
Problema 2D (sisma_dirX)
Problema 3D (sisma_XY)
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Esprimendo la soluzione dell’equazione del moto come combinazione dei
modi di vibrare del sistema(*):
(*)
n
U( t ) = ∑ Φ i ⋅ y i ( t )
i =1
I modi di vibrare sono una
caratteristica intrinseca del sistema,
non dipendono dall ’ azione: restano
quelli calcolati in oscillazioni libere
è possibile disaccoppiare le equazioni del moto:
&& + CU
& + KU = −M ⋅ R ⋅ x
&& g
MU
&y&j + 2 ⋅ ξ j ⋅ ω j ⋅ y& j + ω2j ⋅ y j = −π j ⋅ &x&g
Il termine pj viene detto coefficiente di partecipazione modale e misura
l ’ importanza di ciascun modo alla risposta totale del sistema. Il
coefficiente di partecipazione modale si esprime come:
πj =
Φ Tj ⋅ M ⋅ R
Φ Tj ⋅ M ⋅ Φ j
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
La soluzione di ciascuna delle n equazioni del moto:
&y& j + 2 ⋅ ξ j ⋅ ω j ⋅ y& j + ω 2j ⋅ y j = −π j ⋅ &x& g
si ottiene dalla soluzione dell’equazione del moto dell’oscillatore elementare:
&& j + 2 ⋅ ξ j ⋅ ω j ⋅ u& j + ω2j ⋅ u j = − x
&& g
u
amplificata del fattore pj:
y j (t ) = π j ⋅ u j (t )
Il vettore dei gradi di libertà del sistema, al j-mo modo, risulta quindi:
U j (t ) = Φ j ⋅ y j (t ) = π j ⋅ Φ j ⋅ u j (t )
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
La soluzione totale è sovrapposizione dei contributi modali:
n
~
U(t) = ∑ π j ⋅ Φ j ⋅ uj (t) = Φ ⋅ Z
j=1
φ11
~ ...
Φ=
...
n
φ1
... ... φ1n
... ... ...
... ... ...
... ... φnn
y1(t)
...
Z(t) =
...
y
(
t
)
n
E’ possibile quindi definire “n” sistemi di forze statiche equiv.:
pseudoaccelerazione
~
~
~
~
Fs (t) = K ⋅ U(t) = K ⋅ Φ ⋅ Z(t) = K ⋅ Φ ⋅ π j ⋅ y j (t) = M ⋅ Φ ⋅ ω2j ⋅ π j ⋅ y j (t) = M ⋅ Φ ⋅ π j ⋅ a j (t)
spostamento
con cui ricavare, tramite
analisi statica, reazioni e
sollecitazioni agenti nella
struttura al generico istante di
tempo t, per ciascun modo di
vibrare.
1° modo
2° modo
3° modo
4° modo
5° modo
Distribuzione schematica delle forze statiche equivalenti associate ai diversi modi
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Ad esempio, il taglio totale alla base di un edificio multipiano è pari alla
somma delle forze statiche equivalenti relative agli “n” modi:
n
n
(RT ⋅ M ⋅ Φ j )2
j=1
(ΦTj ⋅ M ⋅ Φ j )
Vb (t) = ∑ f (t) = R ⋅ Fs (t) = ∑
i=1
i
s
T
forza al piano i-mo
n
~ ⋅ ω2 ⋅ u (t)
⋅ ω ⋅ u j (t ) = ∑ m
j
j
j
2
j
j=1
Il termine:
(Φ ⋅ M⋅ R)
~
mj =
(Φ ⋅ M⋅ Φj )
T
j
T
j
2
(*)
tutti gli n modi
n
m<n
j= 1
j= 1
~ =M
∑m
j
tot
solo i primi m modi
~ = α⋅M
∑m
j
tot
α < 1 α min ≈ 0.8
ha le dimensioni di una massa ed è solitamente indicato come massa efficace
della struttura al modo j-mo, poiché può essere interpretato come la quota
parte della massa totale della struttura eccitata dal j-mo modo di vibrare.
(*) se si sono normalizzati i modi di vibrare (
Φ Tj ⋅ M ⋅ Φ j )= 1
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Se non si è interessati al comportamento nel tempo del sistema, ma solo alla
risposta massima, si può utilizzare lo spettro di risposta.
Ad esempio, il vettore dei massimi spostamenti relativi ed il massimo taglio
alla base, in corrispondenza del j-mo modo, risultano:
U j (t ) = π j ⋅ Φ j ⋅ u j (t )
Umax
= Φ j ⋅ π j ⋅ SDe (Tj , ξ j )
j
~ ⋅ a (t )
Vbj (t ) = m
j
j
~ ⋅ S (T , ξ )
Vbjmax = m
j
Ae
j
j
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
I massimi modali sono in valore assoluto. Inoltre, essi non sono contemporanei
fra loro. Pertanto, la risposta globale del sistema non può essere ottenuta
semplicemente sommando i massimi modali dedotti con lo spettro di risposta.
Si ricorre a tecniche di combinazione modale derivanti da analisi
probabilistica:
SRSS E = (Si Ei2)1/2
se (Ti-Tj)/Ti > 0.1
CQC E = (SiSj rij Ei Ej)1/2
se (Ti-Tj)/Ti ≤ 0.1
E è il valore totale della componente di risposta sismica
Ei è il valore della medesima componente dovuta al modo i
Ej è il valore della medesima componente dovuta al modo j
rij = (8x2 (1 + bij) bij3/2) / ((1 - bij2)2 + 4x2bij(1 + bij)2)
x è il coefficiente di smorzamento viscoso equivalente
bij è il rapporto tra le frequenze dei modi i-j (bij = wi/wj).
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Analisi modale con spettro di risposta di un edificio multipiano
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi
di libertà
Esempio 1: struttura intelaiata ad N
piani: influenza sui modi di vibrare della
regolarità della struttura in pianta
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Esempio 2: struttura intelaiata ad N
piani: influenza sui modi di vibrare della
struttura di irregolarità in pianta
conseguenti ad una non coincidenza fra
centro di massa e centro di rigidezza
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Esempio 3: struttura intelaiata ad N
piani: influenza sui modi di vibrare della
struttura di irregolarità in pianta
conseguenti ad una non coincidenza fra
centro di massa e centro di rigidezza
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Esempio:
Analisi di un sistema a 2-GL con spettro di risposta
1. Modello strutturale, matrici di massa e di rigidezza
m, EJt = ∞
h = 4m
v1
m=1
h
h
EJp
K = 900 ton/m
EJp
m, EJt = ∞
EJp
tonsec2/m
v2
F,v
EJp
k=
v&&g
UT = {v1 v2 }
m 0
M=
0
m
RT = {1 1}
12 ⋅ EJp
h3
2k − 2k
K=
−
2
k
4
k
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Esempio:
Analisi di un sistema a 2-GL con spettro di risposta
2. Calcolo autovalori e autovettori
2k − λm
− 2k
K − λ ⋅M =
= m2 ⋅ λ2 − 6 ⋅ k ⋅ m ⋅ λ + 4 ⋅ k 2 = 0
4k − λm
− 2k
λ = (3 ± 5 ) ⋅ (k m) ⇒ λ 1 = 0.763 ⋅ (k m), λ 2 = 5.236 ⋅ (k m)
ω1 = 0.87 ⋅ k m = 26.1rad/sec ⇒ T1 = 2π 26.1 = 0.24 sec
ω2 = 2.29 ⋅ k m = 68.7 rad/sec ⇒ T2 = 2π 68.7 = 0.09 sec
(2k − 0.763k) ⋅ v1 − 2k ⋅ v2 = 0 ⇒ Φ1T = {1 0.619}
(2k − 5.236k) ⋅ v1 − 2k ⋅ v2 = 0 ⇒ Φ2T = {− 0.619 1}
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Esempio:
Analisi di un sistema a 2-GL con spettro di risposta
3. Normalizzazione autovettori
1 0 1
T
Φ ⋅ M ⋅ Φ1 = {1 0.619}⋅
⋅
= 1.383 ⇒ Φ1N = {0.85 0.526}
0 1 0.619
T
1
1 0 − 0.619
T
Φ2T ⋅ M ⋅ Φ2 = {− 0.619 1}⋅
⋅
= 1.383 ⇒ Φ2N = {− 0.526 0.85}
0 1 1
1°
modo
2°
modo
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Esempio:
Analisi di un sistema a 2-GL con spettro di risposta
4. Coefficienti di partecipazione modale
1 0 1
π1 = Φ1T ⋅ M ⋅ R = {0.85 0.526}⋅
⋅ = 1.376
0 1 1
1 0 1
π2 = Φ ⋅ M ⋅ R = {− 0.526 0.85}⋅
⋅ = 0.323
0 1 1
T
2
π12 + π22 = 2 ⇔ Mtot
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Esempio:
Analisi di un sistema a 2-GL con spettro di risposta
Sa (m/sec2)
5. Risposta massima modale
10
T1 = 0.24 sec ⇒ SA1 = 8.58 m/sec2
9
8
7
Spettro elastico NI
6
(zona 1_suolo A)
T2 = 0.09 sec ⇒ SA2 = 6.52 m/sec2
5
4
x = 5%
3
2
PGA = 0.35g
1
0
0
0.5
1
1.5
2
2.5
3
3.5
4
Periodo (sec)
&& max = π ⋅ S ⋅ Φ = 9.89 m/sec2
U
1
1
A1
1
6.12
&& max = π ⋅ S ⋅ Φ = − 1.1 m/sec2
U
2
2
A2
2
1.79
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Esempio:
Analisi di un sistema a 2-GL con spettro di risposta
6. Forze statiche equivalenti
9.89
F1max = M ⋅ v1max =
ton
6.12
max
2
F
= M⋅ v
max
2
− 1.1
=
ton
1
.
79
1.1
9.89
6.12
1.79
1°
modo
2°
modo
Dinamica Sismica delle Strutture
5. Sistemi elastici a più gradi di libertà
Esempio:
Analisi di un sistema a 2-GL con spettro di risposta
7. Effetti (sollecitazioni, reazioni, ecc.) massimi
max
b1
V
V
max
1
= R ⋅F
T
max
2
9.89
= {1 1}⋅
= 16.01ton
6.12
SRSS
2
max 2
Vbmax = (Vbmax
)
+
(
V
1
b2 )
− 1.1
= {1 1}⋅
= 0.69 ton
1.79
9.89
T
max
{
}
Mbmax
=
H
⋅
F
=
8
4
⋅
= 103.6 tm
1
1
6.12
16.03 ton
SRSS
2
max 2
Mbmax = (Mbmax
)
+
(
M
1
b2 )
=
− 1.1
T
max
{
}
=
⋅
=
⋅
Mbmax
H
F
8
4
= −1.64 tm
2
2
1.79
=
max
b2
= R ⋅F
T
103.61tm
Dinamica Sismica delle Strutture
5. SISTEMI CONTINUI
Dinamica Sismica delle Strutture
6. Sistemi continui
Vi sono casi in cui non è possibile individuare masse ed elasticità
concentrate in numero finito (sistemi a n GL) e occorre fare
riferimento a modelli continui.
TRAVE DEFORMABILE A TAGLIO
v(x, t)
p(x, t) dx
dv
p(x, t)
T
T+
X
dx
m(X),
As(X),
Rigidezza tagliante:
..
G
Ft = m(x) v(x,t) dx
Ks(x) = G As(x)
Per piccoli spostamenti: g = dv / dx = v’(x, t) da cui:
T(x) = -G As(x) v’ (x, t)
∂T
∂x
Dinamica Sismica delle Strutture
6. Sistemi continui
Per la scrittura dell ’ equazione del moto si impone l ’ equilibrio alla
traslazione verticale:
∂T
..
dx − m( x)v( x, t )dx + p ( x, t )dx = 0
T −T −
∂x
∂
m( x)v( x, t ) − [K s ( x)v' ( x, t )] = p( x, t )
∂x
..
Nel caso di travi a sezione costante:
..
mv..( x, t ) − K s v' ' ( x, t ) = p ( x, t )
Nel caso di oscillazioni libere, ponendo:
si ottiene quindi:
..
v( x, t )dx − cs2 v' ' ( x, t ) = 0
cs =
Ks
m
dove cs ha dimensioni di una velocità.
Dinamica Sismica delle Strutture
6. Sistemi continui
TRAVE DEFORMABILE A SFORZO ASSIALE
n(x, t) dx
u(x, t)
N
n(x, t)
N+
X
∂N
∂x
dx
m(X),
A(X),
..
E
Ft = m(x) u(x,t) dx
Rigidezza estensionale: KN(x) = E As(x)
è pari allo sforzo N che
produce una deformazione
e unitaria
Per piccoli spostamenti: e = du / dx = u’(x, t) da cui:
N(x) = EAs(x) u’ (x, t)
Dinamica Sismica delle Strutture
6. Sistemi continui
Per la scrittura dell ’ equazione del moto si impone l ’ equilibrio alla
traslazione orizzontale:
∂N
..
N−N−
dx − m( x)u ( x, t )dx + n( x, t )dx = 0
∂x
∂
m( x)u ( x, t ) − [K N ( x)u ' ( x, t )] = n( x, t )
∂x
..
Nel caso di travi a sezione costante:
..
mu ( x, t ) − K N u ' ' ( x, t ) = n( x, t )
Nel caso di oscillazioni libere, ponendo:
si ottiene quindi:
..
u ( x, t )dx − c N2 u ' ' ( x, t ) = 0
cN =
KN
m
Dinamica Sismica delle Strutture
6. Sistemi continui
l’equazione del moto è formalmente identica per entrambi le condizioni:
..
TAGLIO
v( x, t )dx − c v' ' ( x, t ) = 0
2
s
..
SFORZO ASSIALE
u ( x, t )dx − c N2 u ' ' ( x, t ) = 0
La soluzione si ottiene per separazione delle variabili, ponendo:
v(x,t) = f(x) y(t)
Da cui:
..
f(x) y(t) – c2 f’’(x) y(t) = 0
..
φ ' ' ( x) y (t )
c
=
= −ω 2
φ ( x) y (t )
2
La costante w deve essere
necessariamente
negativa
altrimenti la soluzione non è
accettabile perché divergente.
Dinamica Sismica delle Strutture
6. Sistemi continui
La soluzione dell’equazione nelle incognite x e t viene ricondotta ala
soluzione delle seguenti due equazioni differenziali:
φ ' ' ( x) +
ω2
c2
φ ( x) = 0
Risposta in spostamento (x)
&y&(t ) + ω 2 y (t ) = 0
Risposta nel tempo (t)
Trattandosi di equazioni differenziali lineari del secondo ordine e a
..
coefficienti costanti, ponendo g=w/c, si ottengono le seguenti soluzioni:
f(x) = A1sin(gx) + A2cos(gx)
y(t) = B1sin(wt) + B2cos(wt)
Condizioni al contorno:
y(0) = y0
.
.
y(0) = y0
B1 =
y& (0)
ω
; B2 = y (0)
Dinamica Sismica delle Strutture
6. Sistemi continui
Mensola deformabile a taglio
x
L
Si analizza la risposta al variare di x fornita dall’equazione:
φ(x) = A1sin(gx) + A2cos(gx)
Le costanti Ai si ricavano dalle seguenti condizioni:
φ(0) = spostamento nullo all’incastro
φ’(L) = taglio nullo all’estremo libero (T(L)=-GAsφ’(L)y(t))
Il sistema ammette infinite soluzioni, cioè sono infiniti i valori di Ai che
soddisfano le assegnate condizioni al contorno
Dinamica Sismica delle Strutture
6. Sistemi continui
Mensola deformabile a taglio
Dalla condizione φ(0) = 0 si ottiene A2 = 0
Considerado che:
φ’(x) =g A1 cos(gx)
φ’(L)= g A1 cos(gL) = 0
Se si esclude il caso banale di assenza di moto A1 = 0, la precedente
condizione è verificata, qualunque sia il valore di A1, per:
gL = (2j -1) π/2
gj = (2j -1) π/2L
Esistono pertanto infinite soluzioni, ottenibile al variare di j, conseguenza
del fatto che il sistema continuo possiede infiniti gradi di libertà, che
assumono la forma
φ(x) = A1sin(gx) + A2cos(gx)
Con la costante A1j arbitraria
π
φ j ( x) = A1 j sin (2 j − 1)
x
2L
Dinamica Sismica delle Strutture
6. Sistemi continui
Mensola deformabile a taglio
π
φ j ( x) = A1 j sin (2 j − 1)
x
2L
Fornisce le infinite forme
modali o autofunzioni possedute
dal sistema
Ricordando che gj = ωj / cs si ottengono anche i valori delle infinite
pulsazioni ωi e degli infiniti periodo di vibrare Tj:
ω j = (2 j − 1)
Tj =
πcs
2L
2π
ωj
→ ω j = (2 j − 1)
→ Tj =
4L
(2 j − 1)
π
2L
m
Ks
Ks
m