Fino agli inizi degli anni ‘90 la stragrande maggioranza degli
azionamenti utilizzava un motore in corrente continua; tale scelta
era, essenzialmente, dovuta alla maggiore facilità connessa alla
alimentazione controllata di un avvolgimento in c.c. rispetto a
quella di un avvolgimento in c.a.
La situazione è cambiata durante la seconda metà degli anni
’80, infatti, lo sviluppo di nuovi semiconduttori di potenza (in
particolare MOSFET e IGBT) ha permesso di realizzare, con
costi contenuti, inverter caratterizzati da un elevato grado di
affidabilità ed una più elevata frequenza di commutazione.
Inoltre lo sviluppo dei microprocessori (DSP e
Microcontrollori) ha consentito di impiegare tecniche di
controllo molto più sofisticate di quelle tradizionali.
Di conseguenza si è ridestato l’interesse verso gli azionamenti
con motore in corrente alternata.
I motori sincroni sono alimentati
con una tensione alternata trifase
e presentano la proprietà di
ruotare ad una velocità rigidamente legata alla frequenza
della tensione di alimentazione.
Come nei motori in corrente
continua, anche nei motori
sincroni il flusso può essere
prodotto da un avvolgimento di
eccitazione o da magneti
permanenti.
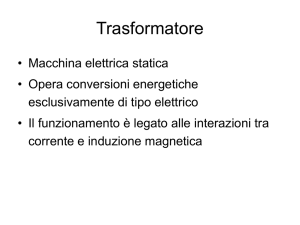
I motori asincroni, detti anche
motori ad induzione, sono
alimentati con una tensione, o
una corrente, alternata ma, a
differenza dei motori sincroni,
la loro velocità di rotazione
dipende, oltre che dalla
frequenza della tensione di
alimentazione, anche dalla
coppia resistente del carico.
Il circuito elettrico di statore è costituito da un avvolgimento,
monofase o trifase, che, nel caso trifase, risulta identico a quello di un
motore sincrono a distribuzione spaziale sinusoidale. Il circuito di
rotore può essere realizzato mediante un avvolgimento trifase o un
circuito (detto a gabbia di scoiattolo) costituito da barre conduttrici
trasversali cortocircuitate tra loro mediante appositi anelli.
I motori con statore monofase sono in genere di piccola potenza; le
loro limitate possibilità di controllo li rendono difficilmente
impiegabili in azionamenti a velocità variabile dove, invece, trovano
largo impiego i motori asincroni con alimentazione trifase e, in
particolare, quelli con rotore a gabbia.
Le macchine in c.a. impiegate negli azionamenti industriali sono,
quindi, caratterizzate da:
-un circuito di statore costituito da un avvolgimento trifase
-un circuito rotorico
monofase (macchine sincrone)
trifase (macchine asincrone).
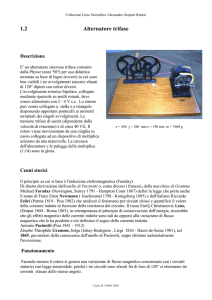
N
N
S
S
Macchina asincrona
Macchina sincrona
Lo studio del comportamento statico e dinamico
dei motori in c.a. è alquanto più complesso e
laborioso di quello dei motori in c.c.
Basta pensare che invece che da circuiti monofase
in corrente continua i motori in c.a. sono
caratterizzati da circuiti (di cui almeno uno trifase)
in c.a.
Per ottenere dei modelli facilmente utilizzabili, è necessario,
quindi, introdurre alcune ipotesi semplificative, che consistono:
nel trascurare le eventuali anisotropie presenti nel circuito
magnetico;
nel considerare il circuito magnetico lineare;
nel supporre che tutte le perdite siano dovute solo alle correnti
che circolano nei circuiti di statore e di rotore della macchina
(si trascurano, quindi, le perdite localizzate nel ferro della
macchina).
Lo studio del comportamento dinamico di un circuito trifase è
alquanto più complesso rispetto a quello di un circuito monofase.
Una notevole semplificazione può essere ottenuta ricorrendo ad una
schematizzazione bifase equivalente.
La schematizzazione bifase equivalente può, in generale, venire
applicata a qualsiasi avvolgimento polifase simmetrico; nel
seguito si prenderanno in considerazione solo avvolgimenti trifase.
Si consideri un avvolgimento trifase simmetrico, cioè costituito
da tre avvolgimenti monofasi uguali e disposti in modo che i
loro assi formino tra loro angoli uguali a 2p/3.
Trascurando le perdite dovute alla variazione del flusso nel
circuito magnetico (perdite nel ferro), le tensioni applicate ai
singoli avvolgimenti sono legate alle correnti e ai flussi dalle
seguenti equazioni differenziali:
essendo Rt la resistenza di ogni
avvolgimento.
Nell’ipotesi di linearità dei circuiti magnetici, i flussi e le
correnti sono legati tra loro dalle seguenti relazioni lineari:
in cui Lt ed M rappresentano, rispettivamente, l’induttanza propria
di ogni avvolgimento e la mutua induttanza tra due avvolgimenti.
Il comportamento del circuito è descritto mediante un sistema
di tre equazioni differenziali tra loro dipendenti. Tale sistema
può essere semplificato ricorrendo alla schematizzazione
bifase equivalente, che consente di ottenere un sistema
composto da tre equazioni differenziali indipendenti.
Il passaggio dalla schematizzazione trifase a quella bifase può
essere effettuato impiegando vari approcci; inizialmente si ci
limiterà ad applicare una opportuna trasformazione lineare di
variabili, definita a priori, successivamente si presenterà una
interpretazione fisica della trasformazione e, quindi, un
approccio sistemistico.
Nella trasformazione bifase equivalente, le variabili (tensioni,
correnti e flussi) sono rappresentate, invece che dalle loro
componenti secondo gli avvolgimenti 1, 2 e 3, dalle
componenti secondo tre avvolgimenti fittizi a, b e 0.
Le componenti di ciascuna
variabile, riferite a tali
avvolgimenti, sono legate
a quelle riferite agli
avvolgimenti 1, 2 e 3 dalla
seguente trasformazione
lineare:
La trasformazione è biunivoca; infatti da xa, xb e x0 è possibile
ricavare le componenti x1, x2 e x3 mediante la seguente
trasformazione inversa:
Sostituendo queste
espressioni in quelle
del modello trifase e
moltiplicando ambo i
membri di tutte le
equazioni per 6, si
ottiene:
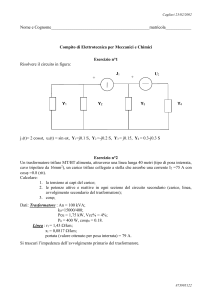
Il nuovo modello coincide con quello che descrive il
comportamento del seguente sistema di avvolgimenti
composto da due avvolgimenti (a e b) uguali tra loro e disposti
secondo due direzioni perpendicolari (quindi, non concatenati
tra loro) e da un terzo avvolgimento (0), a sua volta non
concatenato con i precedenti.
I parametri degli avvolgimenti che compaiono nella
rappresentazione bifase sono legati a quelli degli avvolgimenti
originari dalle seguenti relazioni.
Si può, infine, osservare che, se i tre avvolgimenti 1, 2 e 3 sono
collegati a stella senza neutro, la somma delle tre correnti i1, i2
e i3 risulta nulla; pertanto la corrente i0 è sempre nulla e
l’avvolgimento 0 è aperto. Dualmente, nel caso di
collegamento a triangolo è la somma delle tensioni v1, v2 e v3
ad essere nulla e l’avvolgimento 0 si trova cortocircuitato.
Pertanto, siccome l’avvolgimento 0 non è concatenato con gli
altri due, quando l’avvolgimento trifase è alimentato con
solo tre fili (come sempre avviene quando l’alimentazione è
ottenuta impiegando un convertitore statico), sia la tensione v0
che la corrente i0 sono nulle ed è sufficiente, nella
schematizzazione bifase, considerare solo gli avvolgimenti
a e b.
Il modello bifase equivalente
risulta, quindi, costituito dalle
seguenti
due
equazioni
differenziali:
e dai seguenti legami
istantanei tra le componenti
del flusso e quelle della
corrente:
In questa situazione, inoltre, la trasformazione inversa si
semplifica in:
Per ricavare una interpretazione fisica della schematizzazione
bifase equivalente, conviene introdurre il concetto di vettore
rappresentativo di una grandezza trifase.
A tale scopo, si
consideri il piano in
cui giacciono gli assi
dei tre avvolgimenti
1, 2 e 3
Associando, ad ognuna delle componenti secondo i tre avvolgimenti
della generica grandezza trifase x (tensione o corrente o flusso), un
vettore avente il modulo pari al valore istantaneo della componente, la
direzione dell’asse del relativo avvolgimento e il verso positivo o
negativo a seconda del segno, la terna di grandezze trifasi (x1, x2, x3)
può venire, istante per istante, rappresentata dai tre vettori (x1, x2, x 3).
Il vettore x’ pari alla somma vettoriale dei tre vettori x1, x2 e x3, può
essere, quindi, considerato come il vettore rappresentativo della
grandezza trifase x.
La trasformazione dai valori istantanei x1, x2 e x3 al vettore x’ non è
biunivoca; infatti, se si somma a tutte e tre le componenti x1, x2 e x3
un generico termine Dx, si ottiene lo stesso vettore rappresentativo
x’. Affinché la trasformazione risulti biunivoca, occorre, pertanto,
considerare, oltre al vettore x’, uno scalare, x’0, pari alla somma
scalare dei valori istantanei delle tre componenti, cioè:
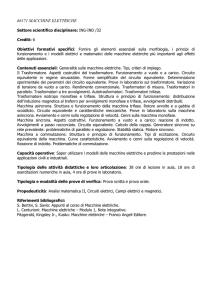
Il vettore rappresentativo x’ può essere decomposto nelle sue
componenti secondo due assi perpendicolari tra loro.
Iin generale si sceglie un sistema di riferimento caratterizzato
da una coppia di assi a e b ortogonali tra loro e orientati in
modo tale che l’asse a abbia la stessa direzione dell’asse
dell’avvolgimento 1.
1
a
x’a
x’
b
x’b
2
3
Confrontando le due trasformazioni:
si ricava:
I due coefficienti
e
sono stati introdotti nella trasformazione bifase equivalente al
fine di mantenere, come si vedrà in seguito, uguali le potenze
nei due sistemi (trifase e bifase).
Si vuole ora determinare come si
modificano le relazioni che legano
tra loro le componenti della
tensione, della corrente e del flusso
quando, invece delle proiezioni dei
loro vettori rappresentativi secondo
gli assi a e b, fissi con
l’avvolgimento trifase, si considerano le proiezioni secondo due
assi ortogonali, d e q, fittizi e
rotanti con una velocità angolare w
rispetto agli assi a e b .
o, equivalentemente:
Sostituendo queste espressioni in quelle del modello bifase
equivalente si ottiene:
Si può, quindi, affermare che:
è possibile studiare il
comportamento di un avvolgimento trifase ricorrendo ad
un circuito equivalente composto da una coppia di
avvolgimenti, a e b, fissi rispetto all’avvolgimento trifase e ortogonali tra loro, e un
avvolgimento 0, che non si
concatena con nessuno dei
due precedenti.
E’, inoltre, possibile prendere in considerazione le
componenti della tensione, della corrente e del flusso
secondo due assi ortogonali d e q, fittizi e rotanti con una
velocità angolare w qualsiasi rispetto all’avvolgimento
reale; in quest’ultimo caso, però, occorre tenere conto dei
termini mozionali -wq e wd .
Dalle relazioni
si ottiene:
Sostituendo queste espressioni in
si ottiene:
essendo:
Come già osservato, l’andamento della variabile di stato
relativa ad un avvolgimento dipende anche dalle tensioni
applicate agli altri avvolgimenti. Per ottenere un sistema di
equazioni tra loro indipendenti, occorre effettuare una
trasformazione di variabili; in particolare, indicate con il
pedice b le variabili relative al sistema trasformato, si può
impiegare la seguente trasformazione:
in cui la matrice non singolare C deve essere tale da rendere
diagonale la matrice
E’ facile verificare che tale condizione è soddisfatta se si
sceglie per la matrice C la seguente struttura:
con , k1 e k2 costanti qualsiasi.
Infatti, scegliendo tale matrice di trasformazione, si ottiene:
e
scegliendo:
la matrice C diventa ortogonale:
La potenza Pb nel sistema bifase è pari a:
Se la matrice di trasformazione C è ortogonale, il prodotto
CTC = C-1C risulta pari alla matrice identità per cui:
Infine, scegliendo = 0, la trasformazione di variabili
coincide con quella già utilizzata
La trattazione presentata può essere estesa anche al caso in cui
l’angolo non sia costante.
In questo caso, indicando con il pedice r le nuove variabili, si ha:
Si ottiene, quindi:
con
Avendo scelto:
la derivata di rispetto al tempo è
pari a w
inoltre
Il modello così
ottenuto coincide,
quindi, con quello
precedentemente
ricavato.
Trasformazione bifase
Quando l’alimentazione è con solo tre conduttori si ha:
x0 =0
La trasformazione inversa si semplifica in:
Il modello bifase equivalente
risulta, quindi, costituito dalle
seguenti
due
equazioni
differenziali:
e dai seguenti legami
istantanei tra le componenti
del flusso e quelle della
corrente:
Assi rotanti
Quando un avvolgimento trifase è alimentato con una terna
simmetrica di tensioni sinusoidali si ha:
Applicando la trasformazione bifase equivalente, si ottiene:
Due tensioni sfasate di 90°
e di ampiezza pari a
cioè pari al valore efficace della tensione concatenata.
Assumendo, quindi, un sistema di riferimento ruotante, rispetto
agli assi fissi, con una velocità angolare pari alla pulsazione Wa
delle tensioni di alimentazione ed indicato con 0 l’angolo che
l’asse d forma con l’asse a nell’istante iniziale t = 0, si ricavano
le seguenti espressioni delle tensioni vd e vq:
cioè due tensioni costanti.
Conseguentemente, nel funzionamento a regime permanente, anche le
componenti delle correnti e dei flussi, riferite agli stessi assi, saranno
costanti; a regime, quindi, i vettori rappresentativi di tutte le
grandezze trifasi sono caratterizzati da un modulo ed una fase
costanti. E’, pertanto, possibile effettuare una rappresentazione
polare
delle
grandezze
elettromagnetiche
relative
all’avvolgimento.
La rappresentazione polare è del tutto analoga alla rappresentazione
con fasori, utilizzata in Elettrotecnica per studiare il comportamento a
regime permanente di un circuito elettrico lineare con alimentazione
sinusoidale.
Sulla base di tale analogia, vari Autori utilizzano, per
rappresentare le grandezze trifasi, la dizione fasore invece che
quella di vettore rappresentativo; occorre, comunque, notare
che, la rappresentazione a fasori è impiegata in Elettrotecnica per
analizzare il comportamento a regime permanente e con
alimentazione sinusoidale mentre quella con i vettori
rappresentativi delle grandezze trifasi può essere utilizzata anche
per analizzare il comportamento transitorio e non implica
andamenti sinusoidali delle grandezze elettromagnetiche.
Se, poi, l’angolo 0 viene scelto uguale a 0 , si ottiene:
Asse diretto orientato secondo la direzione del vettore di tensione.
Occorre, infine, osservare che spesso l’avvolgimento statorico
delle macchine in corrente alternata è realizzato in modo da
presentare più coppie di poli. Quando il numero p di coppie
polari è diverso dall’unità, ad ogni periodo della tensione di
alimentazione il suo vettore rappresentativo compie una
rotazione pari all’angolo giro diviso per il numero di coppie
polari. Per semplificare l’impiego della trasformazione da assi
fissi ad assi rotanti è, allora, conveniente fare riferimento ad un
avvolgimento equivalente, realizzato con una sola coppia di poli;
In questo avvolgimento equivalente, il vettore rappresentativo
della tensione statorica compie un giro ad ogni periodo, cioè
ruota con una velocità angolare pari a p volte quella effettiva.
La velocità di rotazione dei vettori rappresentativi, riferiti
all’avvolgimento equivalente con una sola coppia di poli, sarà
indicata come velocità elettrica ed espressa in radianti elettrici al
secondo; la dizione velocità elettrica si giustifica con la
considerazione che, quando l’alimentazione è sinusoidale, questa
risulta coincidente con la pulsazione dell’alimentazione.